
Two-Dimensional Direction Finding for L-Shaped Coprime Array via Minimization of the Ratio of the Nuclear Norm and the Frobenius Norm



Abstract
1. Introduction
- (1)
- We derive the virtual co-array signal model corresponding to the CCM of LsCA and perform Toeplitz matrix reconstruction utilizing the interpolated virtual co-array signal.
- (2)
- Considering the zero regions of the reconstructed Toeplitz matrix, we utilize the N/F method for low-rank matrix completion. Taking into account the conjugate symmetry characteristics of the completed matrix, a direction-finding algorithm that enables 2D angle estimation is developed.
- (3)
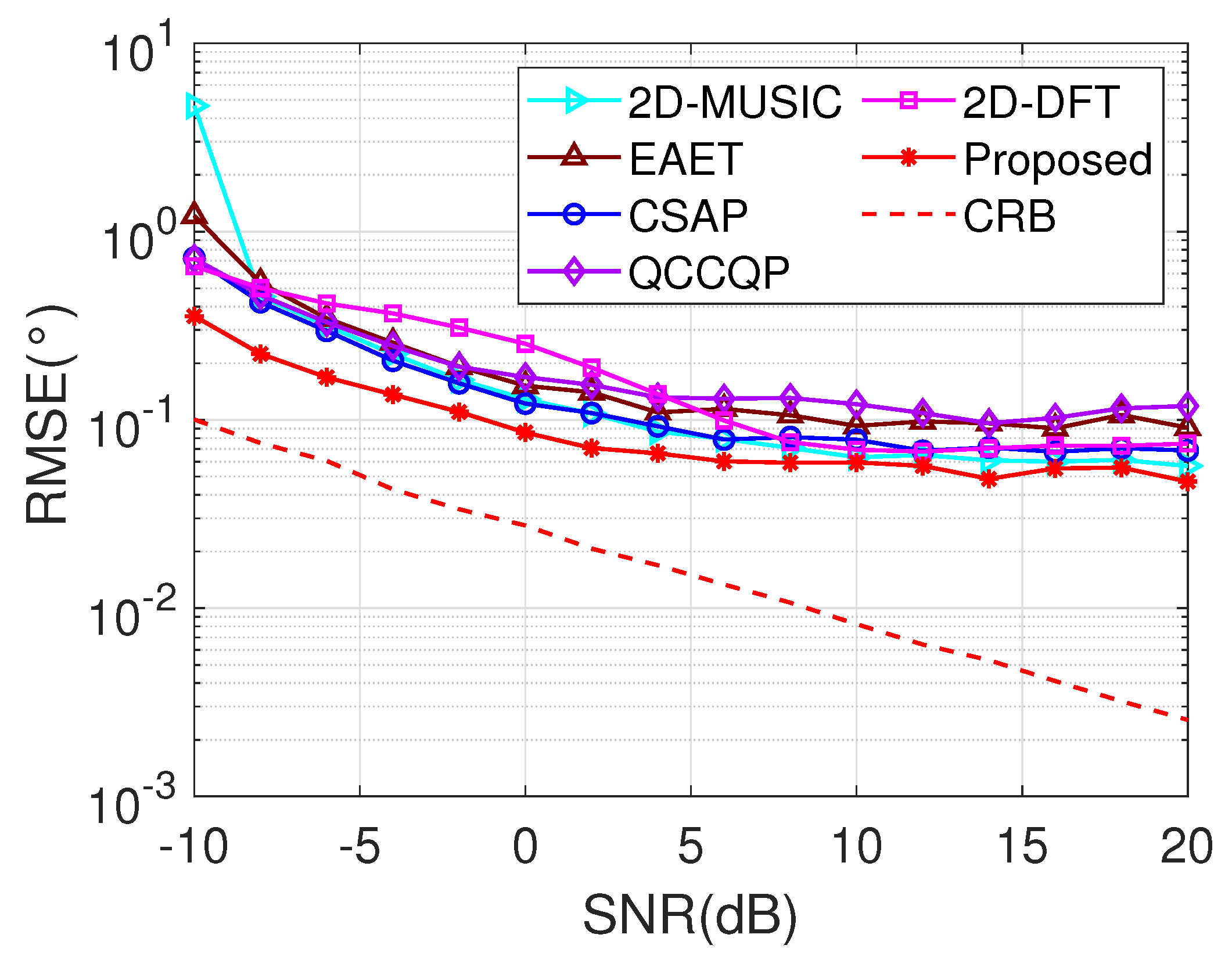
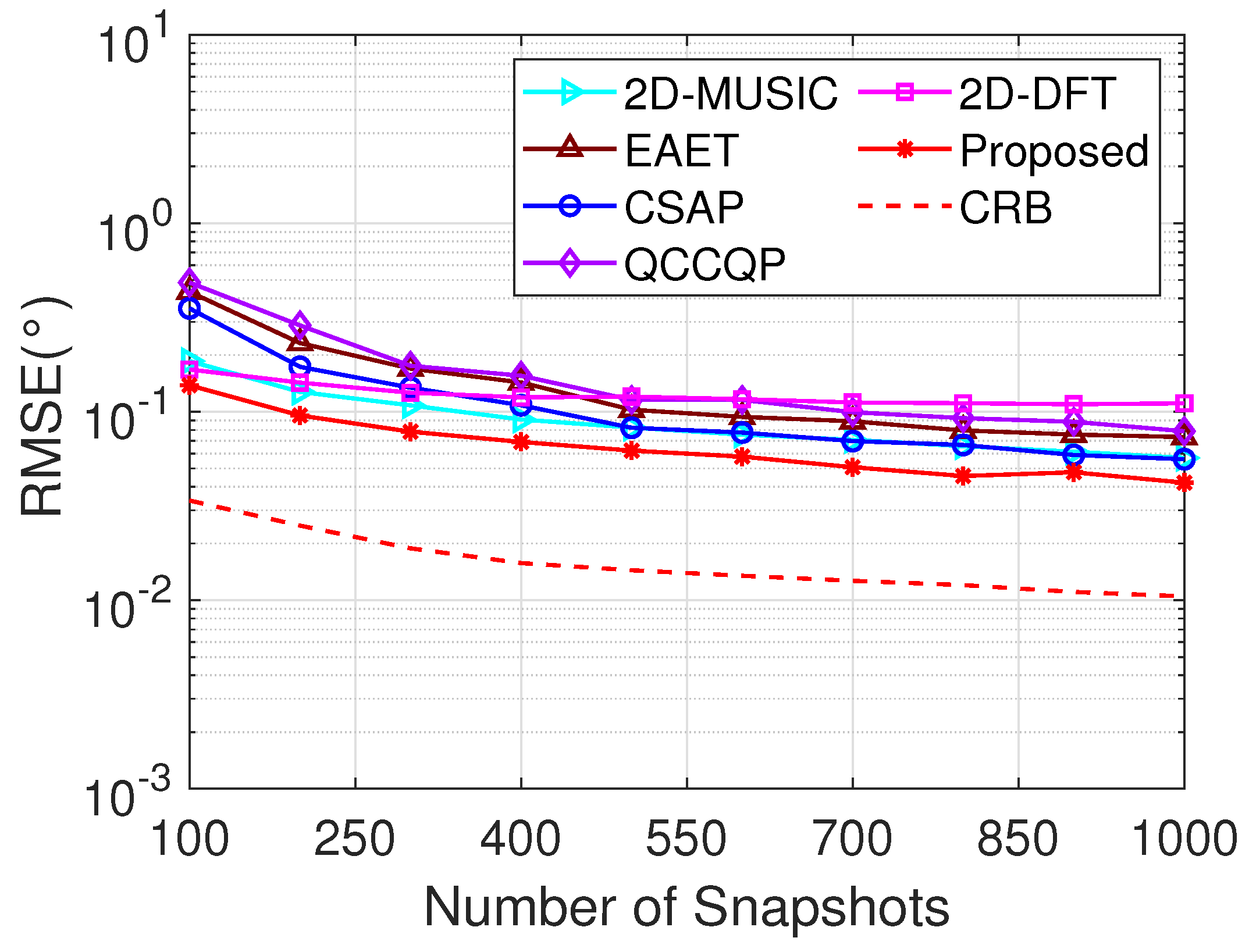
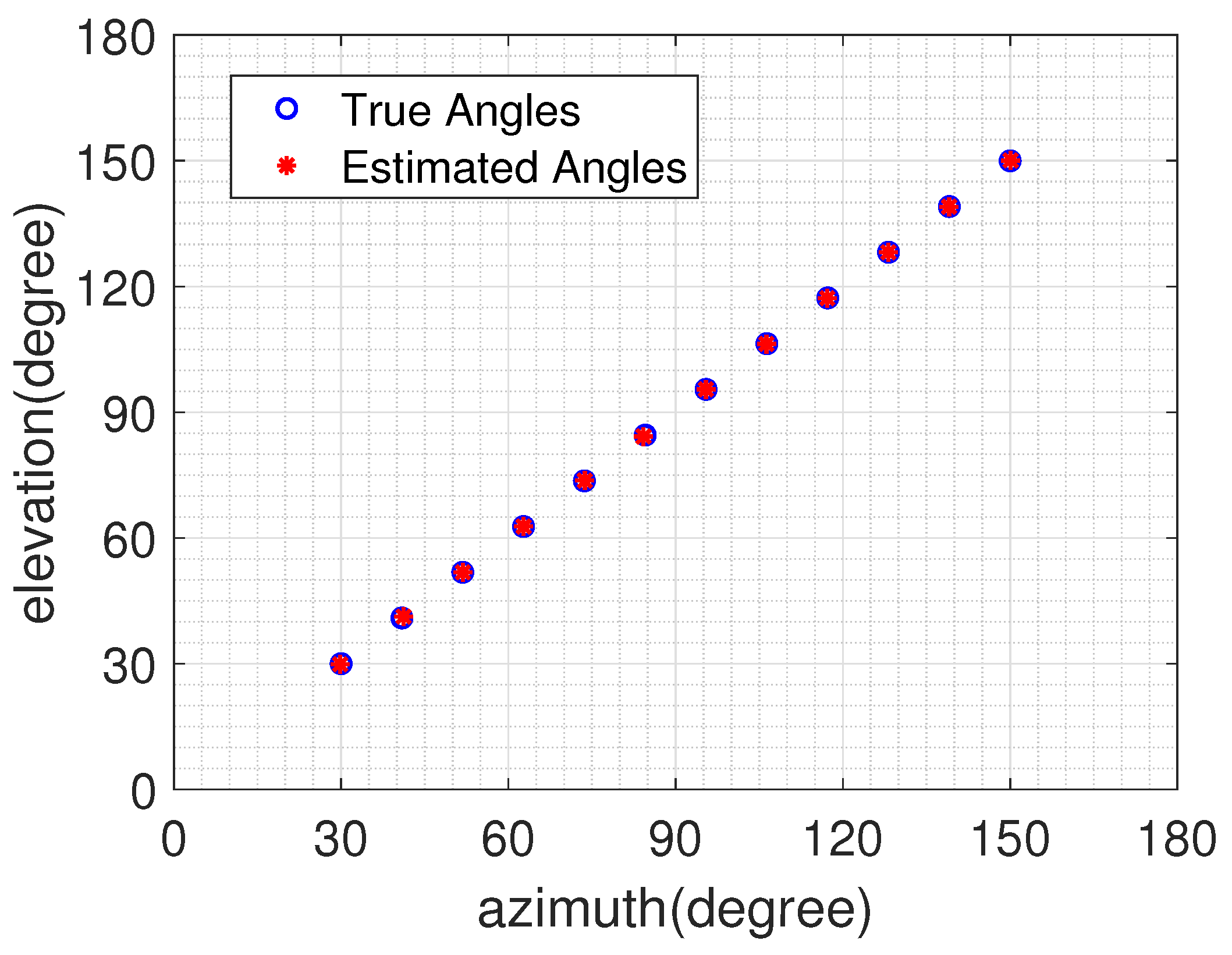
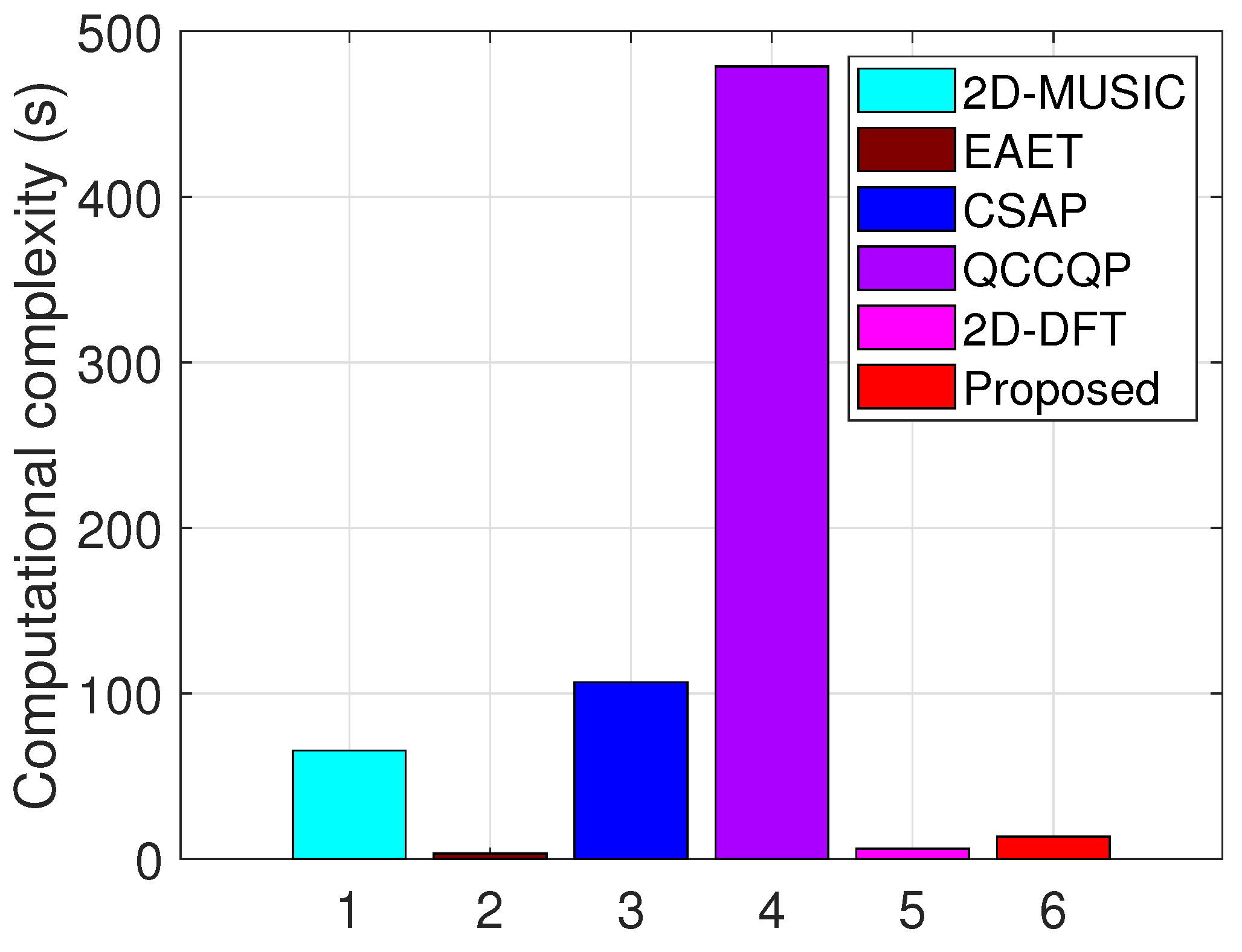
- It can be observed from numerical simulation findings that the proposed N/F algorithm generates excellent performance with respect to angular resolution and computational complexity. In addition, this algorithm yields superior estimation accuracy in comparison with the competing algorithms.
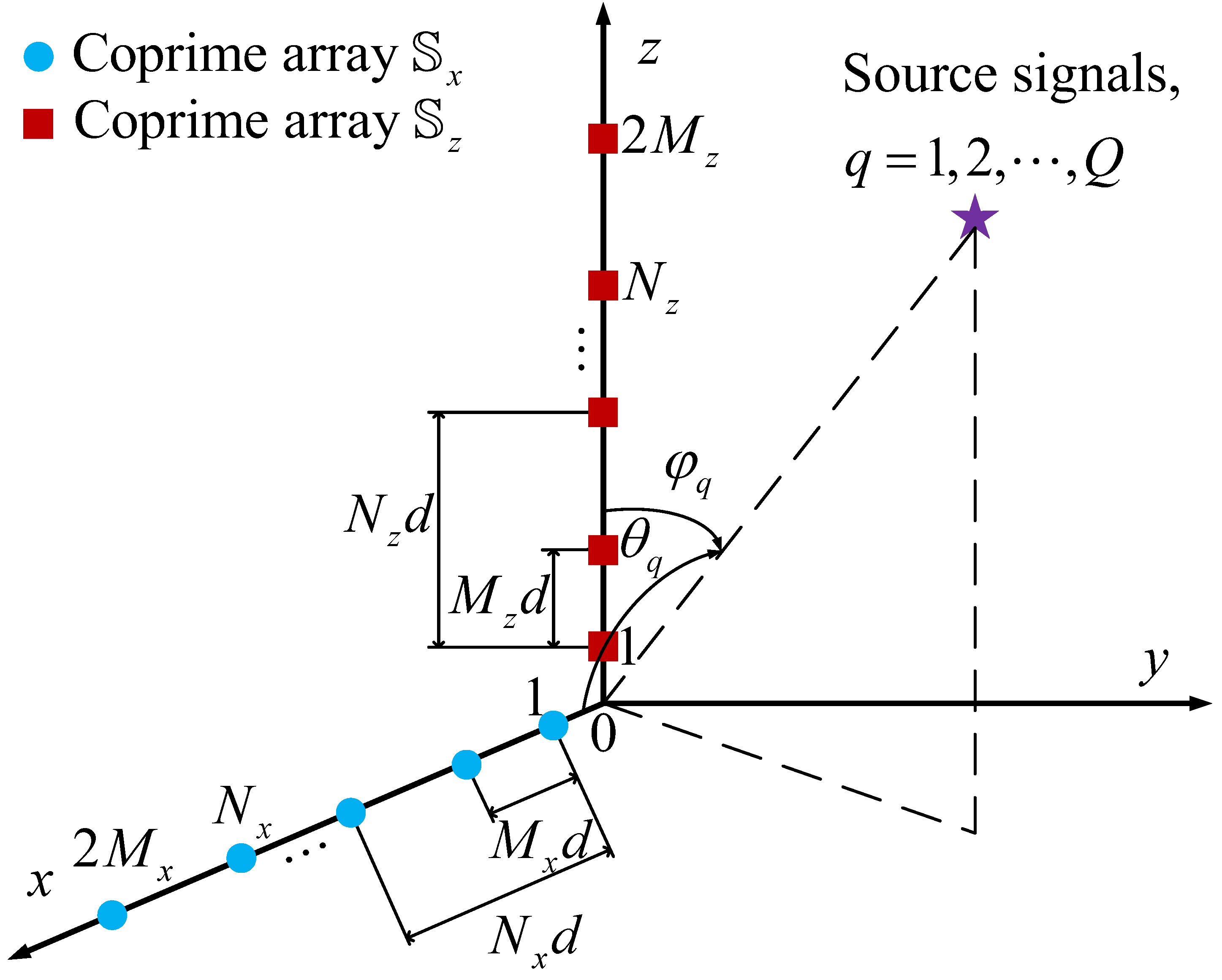
2. L-Shaped Coprime Array Signal Model
3. The Proposed Algorithm
3.1. Low-Rank Matrix Completion
3.2. Angles Estimation
| Algorithm 1 Proposed N/F algorithm for LsCA structure. |
Output: Paired angles .
|
4. Numerical Simulations
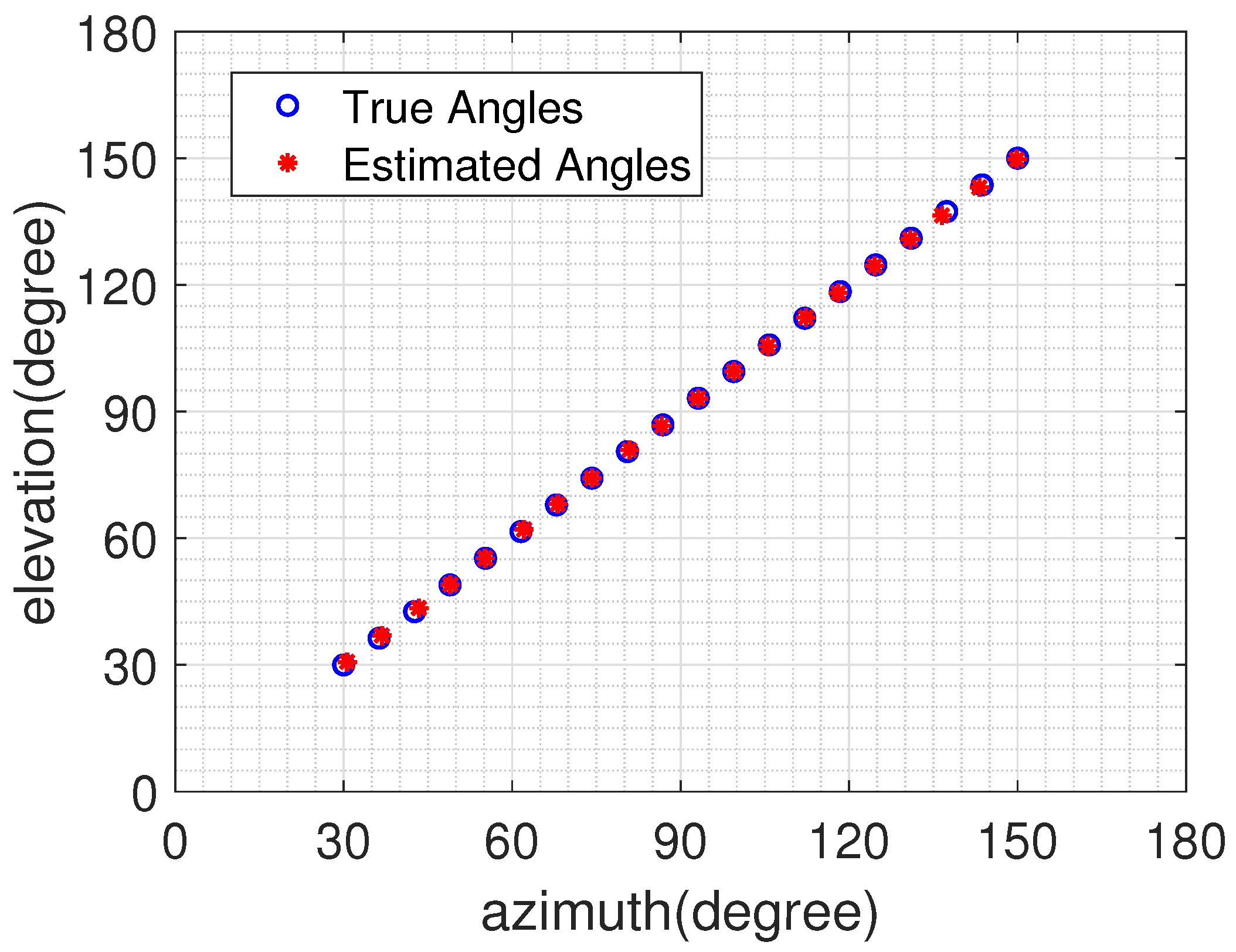
4.1. Estimation Accuracy Comparison
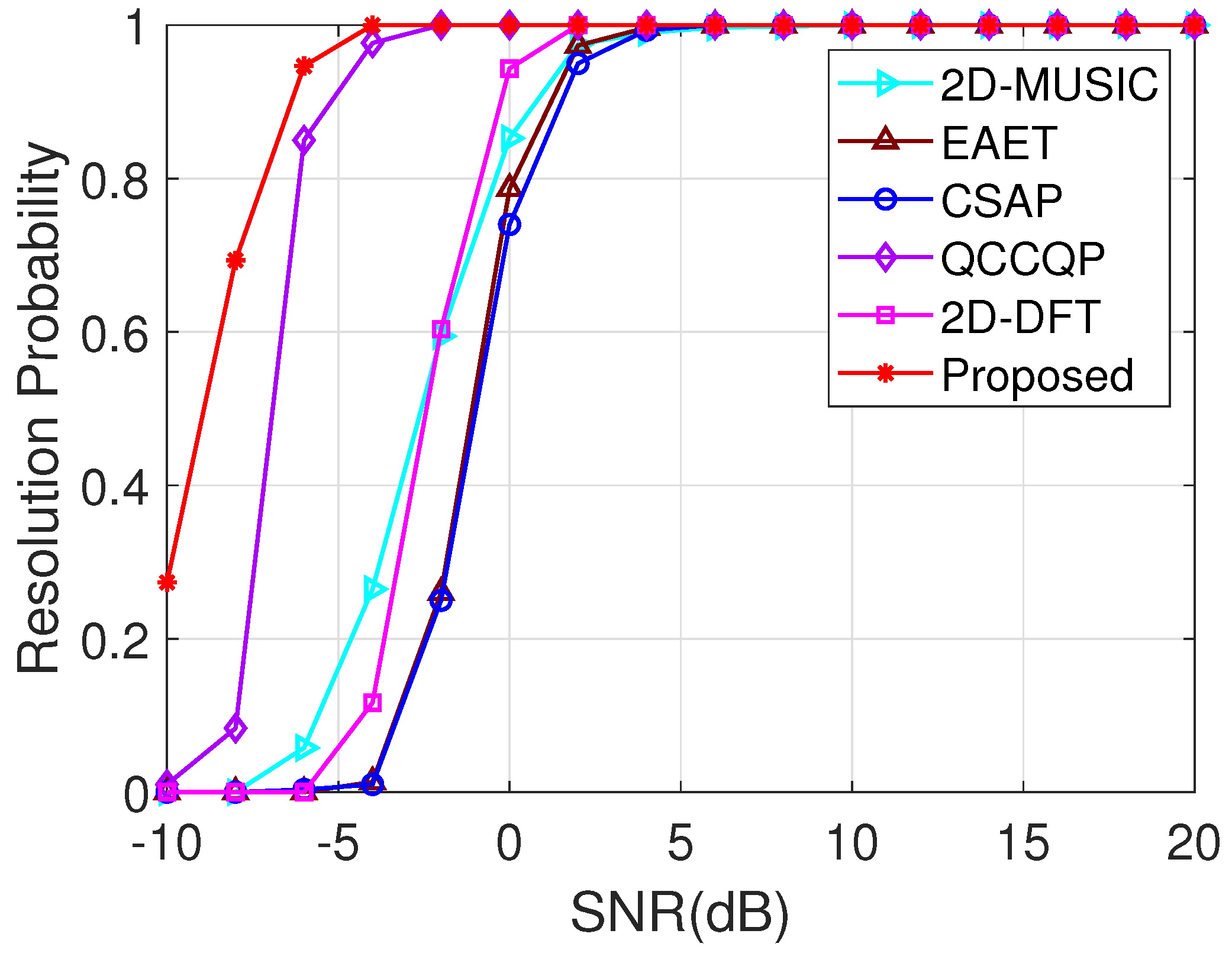
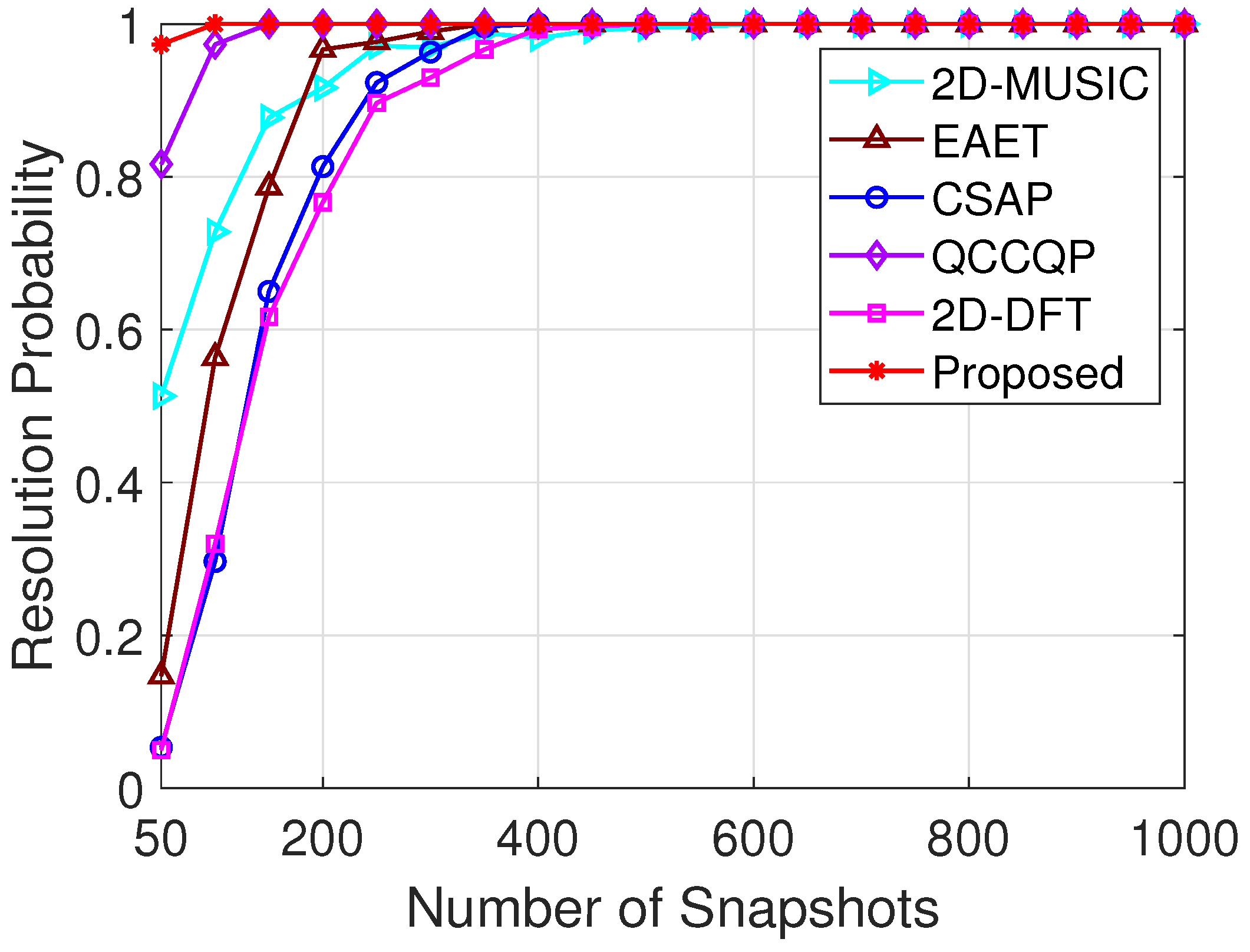
4.2. Angular Resolution Comparison
4.3. Computational Complexity Comparison
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Liu, D.; Zhao, Y.; Zhang, T. Sparsity-Based Two-Dimensional DOA Estimation for Co-Prime Planar Array via Enhanced Matrix Completion. Remote Sens. 2022, 14, 4690. [Google Scholar] [CrossRef]
- Wen, F.; Shi, J.; Zhang, Z. Joint 2D-DOD, 2D-DOA, and polarization angles estimation for bistatic EMVS-MIMO radar via PARAFAC analysis. IEEE Trans. Veh. Technol. 2019, 69, 1626–1638. [Google Scholar] [CrossRef]
- Cheng, L.; Wu, Y.C.; Zhang, J.; Liu, L. Subspace identification for DOA estimation in massive/full-dimension MIMO systems: Bad data mitigation and automatic source enumeration. IEEE Trans. Signal Process. 2015, 63, 5897–5909. [Google Scholar] [CrossRef]
- Wen, F.; Shi, J.; He, J.; Truong, T.K. 2D-DOD and 2D-DOA estimation using sparse L-shaped EMVS-MIMO radar. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 2077–2084. [Google Scholar] [CrossRef]
- Zhou, L.; Ye, K.; Qi, J.; Sun, H. DOA estimation based on pseudo-noise subspace for relocating enhanced nested array. IEEE Signal Process. Lett. 2022, 29, 1858–1862. [Google Scholar] [CrossRef]
- Zhou, L.; Qi, J.; Hong, S. Enhanced Dilated Nested Arrays with Reduced Mutual Coupling for DOA Estimation. IEEE Sens. J. 2024, 24, 615–623. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, J.; Li, Y.; Li, P. A DOA tracking method based on offset compensation using nested array. IEEE Trans. Circuits Syst. II Exp. Briefs 2021, 69, 1917–1921. [Google Scholar] [CrossRef]
- Xu, T.; Wang, X.; Huang, M.; Lan, X.; Sun, L. Tensor-Based Reduced-Dimension MUSIC Method for Parameter Estimation in Monostatic FDA-MIMO Radar. Remote Sens. 2021, 13, 3772. [Google Scholar] [CrossRef]
- Ge, S.; Fan, C.; Wang, J.; Huang, X. Low-complexity one-bit DOA estimation for massive ULA with a single snapshot. Remote Sens. 2022, 14, 3436. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.; Zhang, X. Two-dimensional off-grid DOA estimation using unfolded parallel coprime array. IEEE Commun. Lett. 2018, 22, 2495–2498. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, X.; Sheikh, Y.A.; Ye, Z. A rank-reduction based 2D DOA estimation algorithm for three parallel uniform linear arrays. Signal Process. 2016, 120, 305–310. [Google Scholar] [CrossRef]
- Chen, H.; Hou, C.; Liu, W.; Zhu, W.P.; Swamy, M. Efficient two-dimensional direction-of-arrival estimation for a mixture of circular and noncircular sources. IEEE Sens. J. 2016, 16, 2527–2536. [Google Scholar] [CrossRef]
- Zheng, Z.; Mu, S. 2D Direction FindingWith Pair-Matching Operation for L-Shaped Nested Array. IEEE Commun. Lett. 2020, 25, 975–979. [Google Scholar] [CrossRef]
- Tayem, N.; Kwon, H.M. L-shape 2Dimensional arrival angle estimation with propagator method. IEEE Trans. Antennas Propag. 2005, 53, 1622–1630. [Google Scholar] [CrossRef]
- Kikuchi, S.; Tsuji, H.; Sano, A. Pair-matching method for estimating 2D angle of arrival with a cross-correlation matrix. IEEE Antennas Wirel. Propag. Lett. 2006, 5, 35–40. [Google Scholar] [CrossRef]
- Tayem, N.; Majeed, K.; Hussain, A.A. Two-dimensional DOA estimation using cross-correlation matrix with L-shaped array. IEEE Antennas Wirel. Propag. Lett. 2015, 15, 1077–1080. [Google Scholar] [CrossRef]
- Gu, J.F.; Wei, P. Joint SVD of two cross-correlation matrices to achieve automatic pairing in 2D angle estimation problems. IEEE Antennas Wirel. Propag. Lett. 2007, 6, 553–556. [Google Scholar] [CrossRef]
- Dong, Y.Y.; Dong, C.x.; Xu, J.; Zhao, G.q. Computationally efficient 2D DOA estimation for L-shaped array with automatic pairing. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1669–1672. [Google Scholar] [CrossRef]
- Dong, Y.Y.; Dong, C.x.; Liu, W.; Chen, H.; Zhao, G.q. 2D DOA estimation for L-shaped array with array aperture and snapshots extension techniques. IEEE Signal Process. Lett. 2017, 24, 495–499. [Google Scholar] [CrossRef]
- Wu, R.; Zhang, Z. Convex optimization-based 2D DOA estimation with enhanced virtual aperture and virtual snapshots extension for L-shaped array. IEEE Trans. Veh. Technol. 2020, 69, 6473–6484. [Google Scholar] [CrossRef]
- Xu, F.; Zheng, H.; Vorobyov, S.A. Tensor-based 2D DOA estimation for L-shaped nested array. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 604–618. [Google Scholar] [CrossRef]
- Jin, L.; Fang, J.; Liu, W.; Yu, Z.; Xu, G.; Zhu, M.; Chen, H. Underdetermined two-dimensional angles parameters estimation for incoherent distributed sources based on an L-shaped array. IEEE Sens. J. 2024, 24, 18479–18487. [Google Scholar] [CrossRef]
- Rao, W.; Li, D.; Zhang, J.Q. A tensor-based approach to L-shaped arrays processing with enhanced degrees of freedom. IEEE Signal Process. Lett. 2017, 25, 1–5. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, W.P. On efficient gridless methods for 2D DOA estimation with uniform and sparse L-shaped arrays. Signal Process. 2022, 191, 108351. [Google Scholar] [CrossRef]
- Xi, N.; Liping, L. A computationally efficient subspace algorithm for 2D DOA estimation with L-shaped array. IEEE Signal Process. Lett. 2014, 21, 971–974. [Google Scholar]
- Zhang, T.; Lu, Y.; Hui, H. Compensation for the mutual coupling effect in uniform circular arrays for 2D DOA estimations employing the maximum likelihood technique. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1215–1221. [Google Scholar] [CrossRef]
- Wax, M.; Sheinvald, J. Direction finding of coherent signals via spatial smoothing for uniform circular arrays. IEEE Trans. Antennas Propag. 1994, 42, 613–620. [Google Scholar] [CrossRef]
- Mathews, C.P.; Zoltowski, M.D. Eigenstructure techniques for 2D angle estimation with uniform circular arrays. IEEE Trans. Signal Process. 1994, 42, 2395–2407. [Google Scholar] [CrossRef]
- Ding, X.; Xu, W.; Wang, Y.; Li, Y.; Huang, Y. Wideband 2D DoA Estimation with Uniform Circular Array. IEEE Sens. J. 2024, 24, 11585–11598. [Google Scholar] [CrossRef]
- Zhou, T.; He, Z.; Shi, Q.; Lin, C.; Zhang, S. Multisnapshot High-Resolution Gridless DOA Estimation for Uniform Circular Arrays. IEEE Signal Process. Lett. 2024, 31, 1705–1709. [Google Scholar] [CrossRef]
- Labbaf, N.; Oskouei, H.R.D.; Abedi, M.R. Robust DoA estimation in a uniform circular array antenna with errors and unknown parameters using Deep Learning. IEEE Trans. Green Commun. Netw. 2023, 7, 2143–2152. [Google Scholar] [CrossRef]
- Zoltowski, M.D.; Haardt, M.; Mathews, C.P. Closed-form 2D angle estimation with rectangular arrays in element space or beamspace via unitary ESPRIT. IEEE Trans. Signal Process. 1996, 44, 316–328. [Google Scholar] [CrossRef]
- Wu, H.; Hou, C.; Chen, H.; Liu, W.; Wang, Q. Direction finding and mutual coupling estimation for uniform rectangular arrays. Signal Process. 2015, 117, 61–68. [Google Scholar] [CrossRef]
- Shen, F.F.; Liu, Y.M.; Zhao, G.H.; Chen, X.Y.; Li, X.P. Sparsity-based off-grid DOA estimation with uniform rectangular arrays. IEEE Sens. J. 2018, 18, 3384–3390. [Google Scholar] [CrossRef]
- Ahmed, T.; Zhang, X.; Hassan, W.U. A higher-order propagator method for 2D-DOA estimation in massive MIMO systems. IEEE Commun. Lett. 2019, 24, 543–547. [Google Scholar] [CrossRef]
- Zhang, Z.; Wen, F.; Shi, J.; He, J.; Truong, T.K. 2D-DOA estimation for coherent signals via a polarized uniform rectangular array. IEEE Signal Process. Lett. 2023, 30, 893–897. [Google Scholar] [CrossRef]
- Heidenreich, P.; Zoubir, A.M.; Rubsamen, M. Joint 2D DOA estimation and phase calibration for uniform rectangular arrays. IEEE Trans. Signal Process. 2012, 60, 4683–4693. [Google Scholar] [CrossRef]
- Vaidyanathan, P.P.; Pal, P. Sparse sensing with co-prime samplers and arrays. IEEE Trans. Signal Process. 2010, 59, 573–586. [Google Scholar] [CrossRef]
- Recht, B.; Fazel, M.; Parrilo, P.A. Guaranteed minimum-rank solutions of linear matrix equations via nuclear norm minimization. SIAM Rev. 2010, 52, 471–501. [Google Scholar] [CrossRef]
- Gao, K.; Huang, Z.H.; Guo, L. Low-rank matrix recovery problem minimizing a new ratio of two norms approximating the rank function then using an ADMM-type solver with applications. J. Comput. Appl. Math. 2024, 438, 115564. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Xia, T.; Zheng, Y.; Wan, Q.; Wang, X. Decoupled estimation of 2D angles of arrival using two parallel uniform linear arrays. IEEE Trans. Antennas Propag. 2007, 55, 2627–2632. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Explanation |
|---|---|
| a, , | Scalars, vectors, matrices |
| , , | n-dimensional identity matrix, zero matrix, n-dimensional permutation matrix with 1 on the antidiagonal and 0 elsewhere |
| , , | Conjugate, transpose, Hermitian transpose |
| Diagonalization: Convert vectors into diagonal matrices | |
| The phase of the argument | |
| Mathematical expectation | |
| , | Vectorization: Convert matrices into column vectors, Toeplitz matrix operator |
| Frobenius norm | |
| Nuclear norm | |
| The i-th element of the set | |
| Cardinality of set | |
| , , | Inverse of matrix , pseudo-inverse of matrix , trace of matrix |
| ⊗, ⊙ | Kronecker product, Khatri-Rao product |
| , | The -th element of the matrix , the ith element of the vector |
| Integer set |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, L.; Ye, K.; Zhang, X. Two-Dimensional Direction Finding for L-Shaped Coprime Array via Minimization of the Ratio of the Nuclear Norm and the Frobenius Norm. Remote Sens. 2024, 16, 3543. https://doi.org/10.3390/rs16183543
Zhou L, Ye K, Zhang X. Two-Dimensional Direction Finding for L-Shaped Coprime Array via Minimization of the Ratio of the Nuclear Norm and the Frobenius Norm. Remote Sensing. 2024; 16(18):3543. https://doi.org/10.3390/rs16183543
Chicago/Turabian StyleZhou, Lang, Kun Ye, and Xuebo Zhang. 2024. "Two-Dimensional Direction Finding for L-Shaped Coprime Array via Minimization of the Ratio of the Nuclear Norm and the Frobenius Norm" Remote Sensing 16, no. 18: 3543. https://doi.org/10.3390/rs16183543
APA StyleZhou, L., Ye, K., & Zhang, X. (2024). Two-Dimensional Direction Finding for L-Shaped Coprime Array via Minimization of the Ratio of the Nuclear Norm and the Frobenius Norm. Remote Sensing, 16(18), 3543. https://doi.org/10.3390/rs16183543