
Determination of Microtopography of Low-Relief Tidal Freshwater Forested Wetlands Using LiDAR


Abstract
1. Introduction
2. Study Area
3. Methods
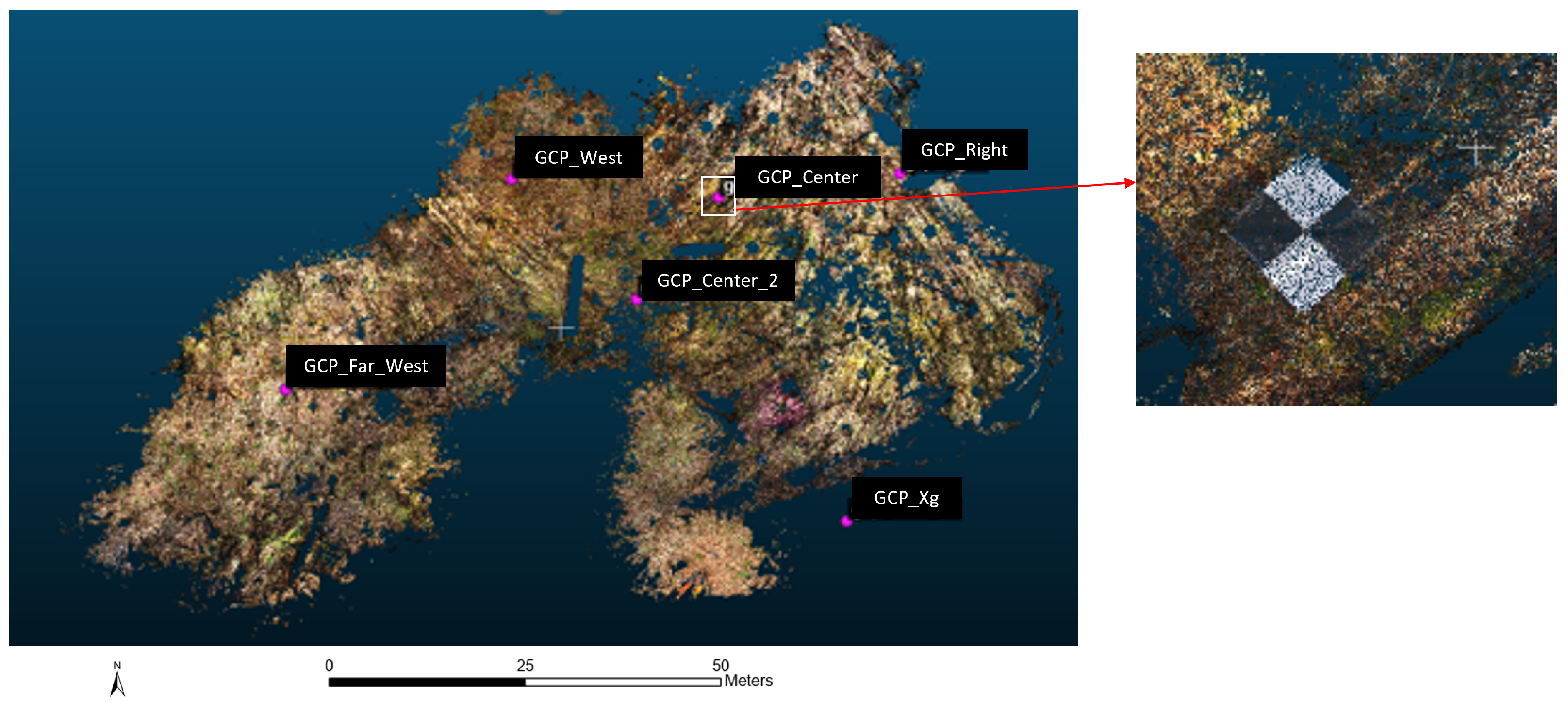
3.1. Terrestrial LiDAR Acquisition
3.2. Model Development
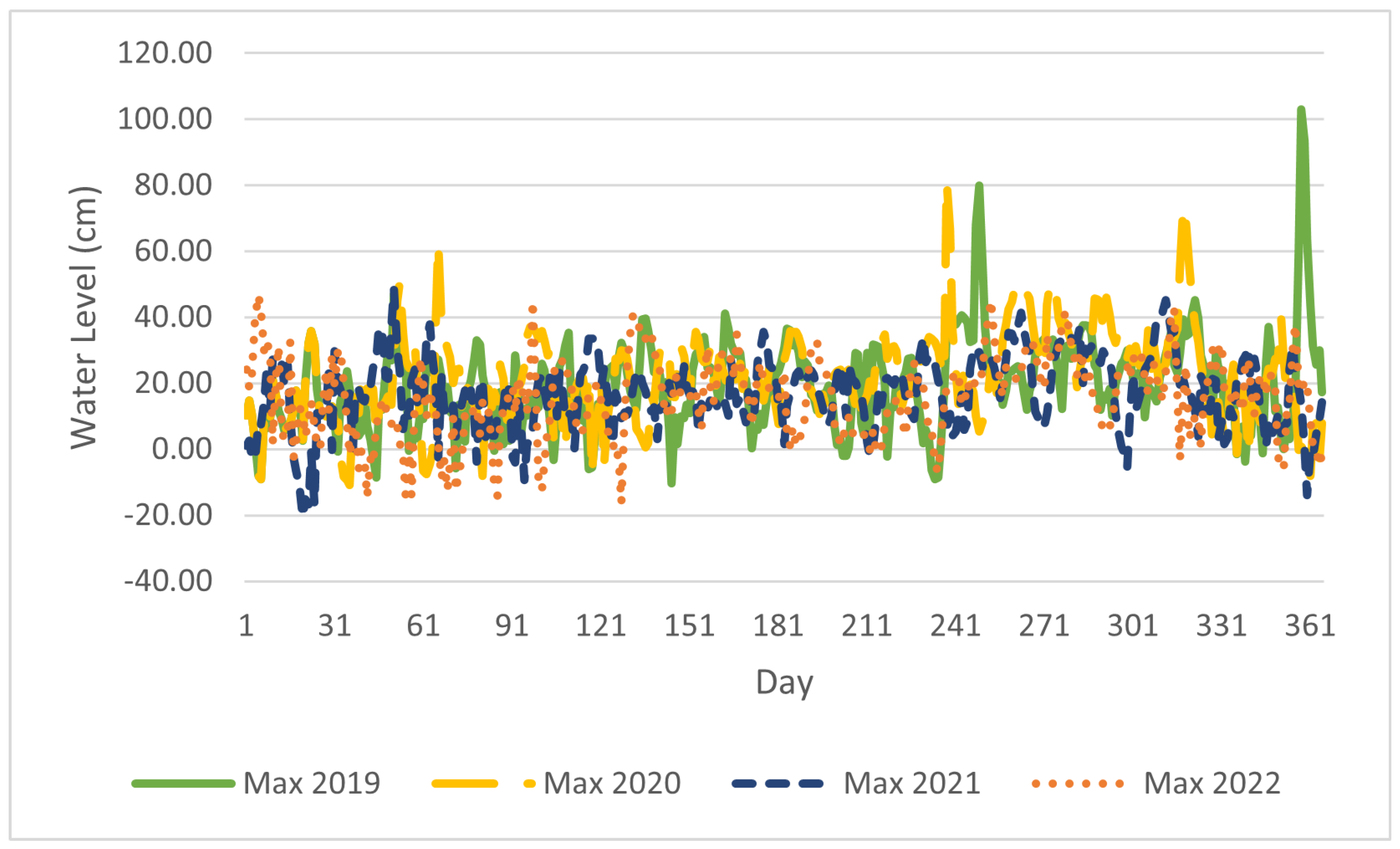
3.3. Water-Level Measurements
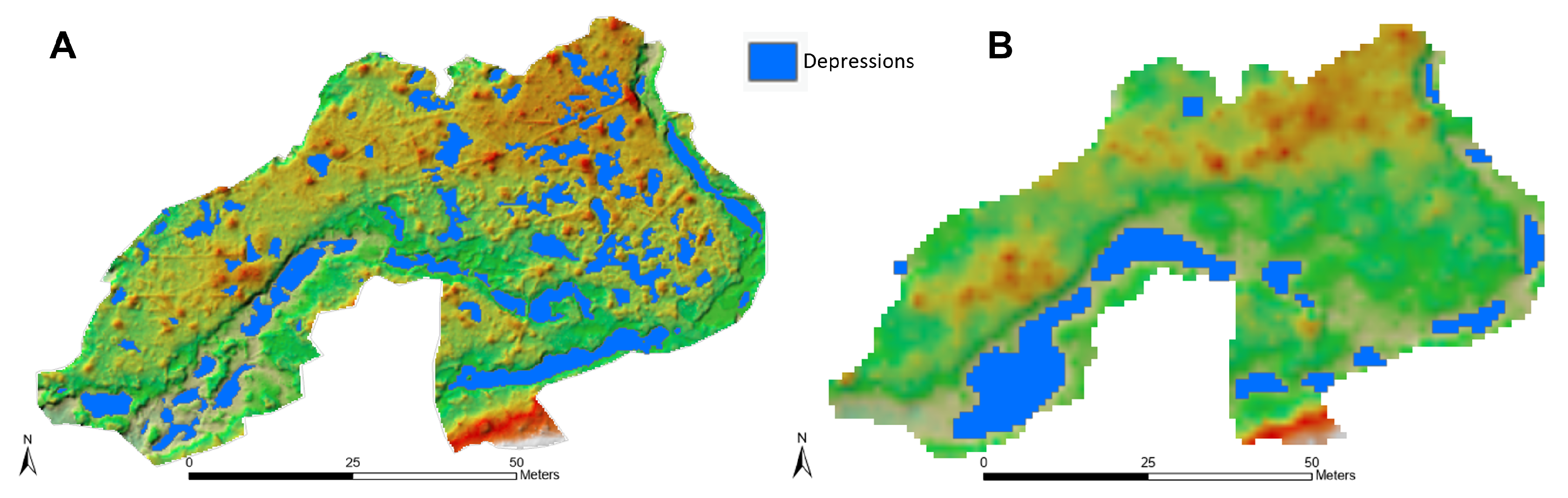
3.4. Depression Delineation
3.5. LiDAR Data Processing
4. Results
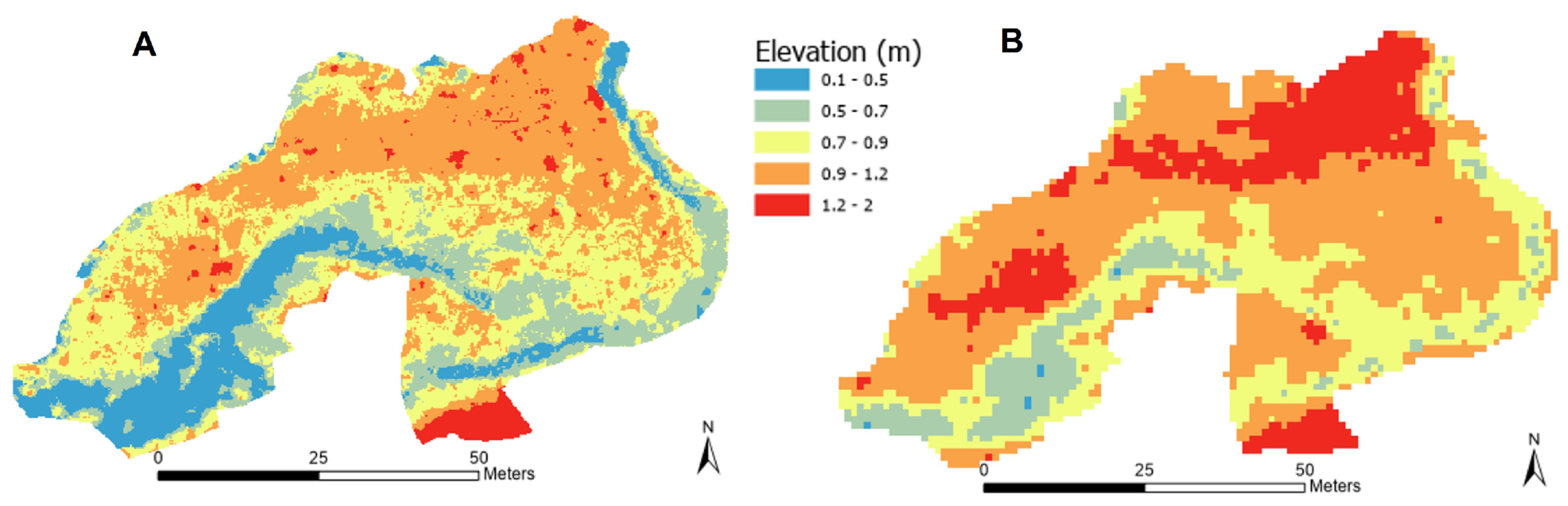
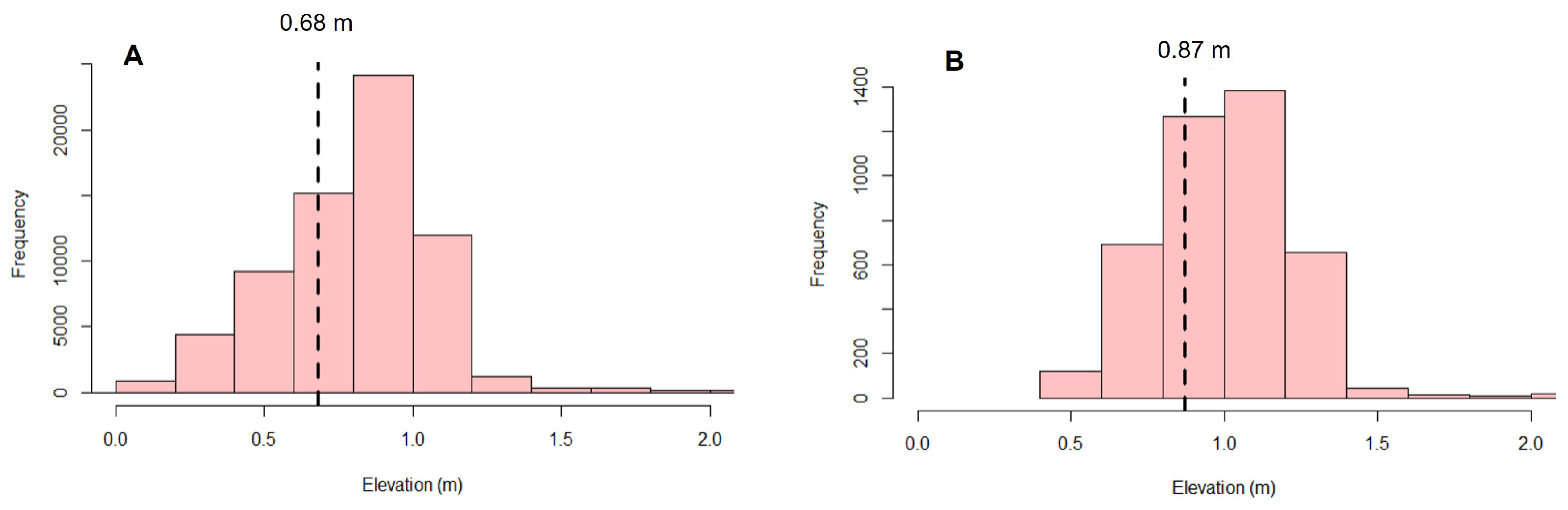
4.1. Elevation Variation
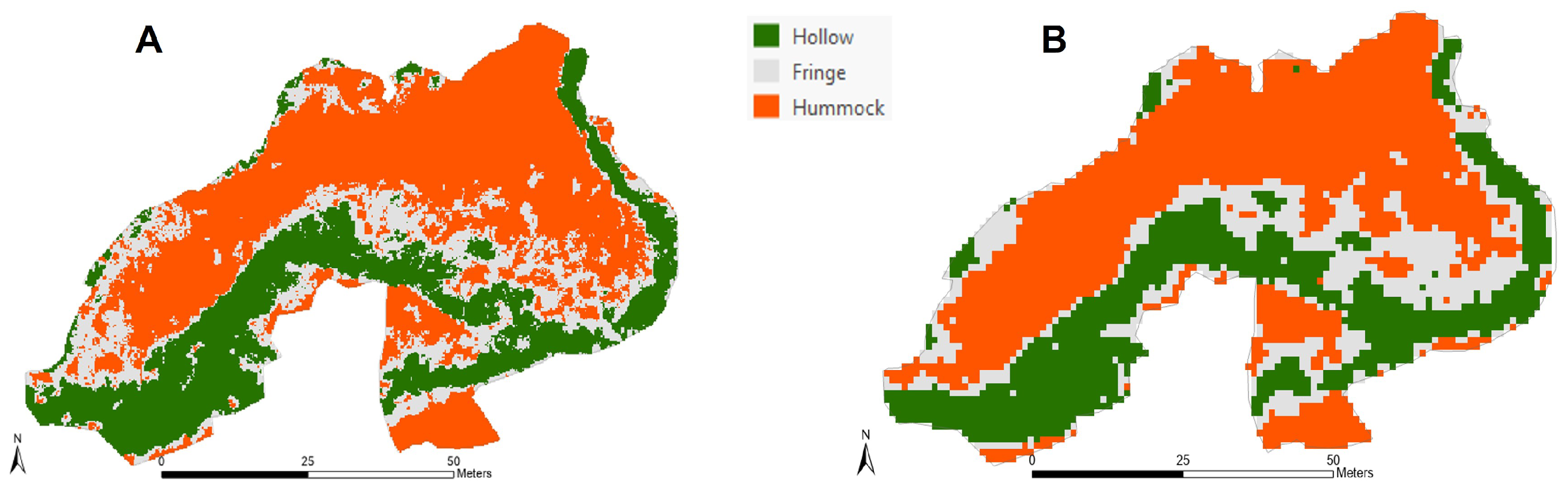
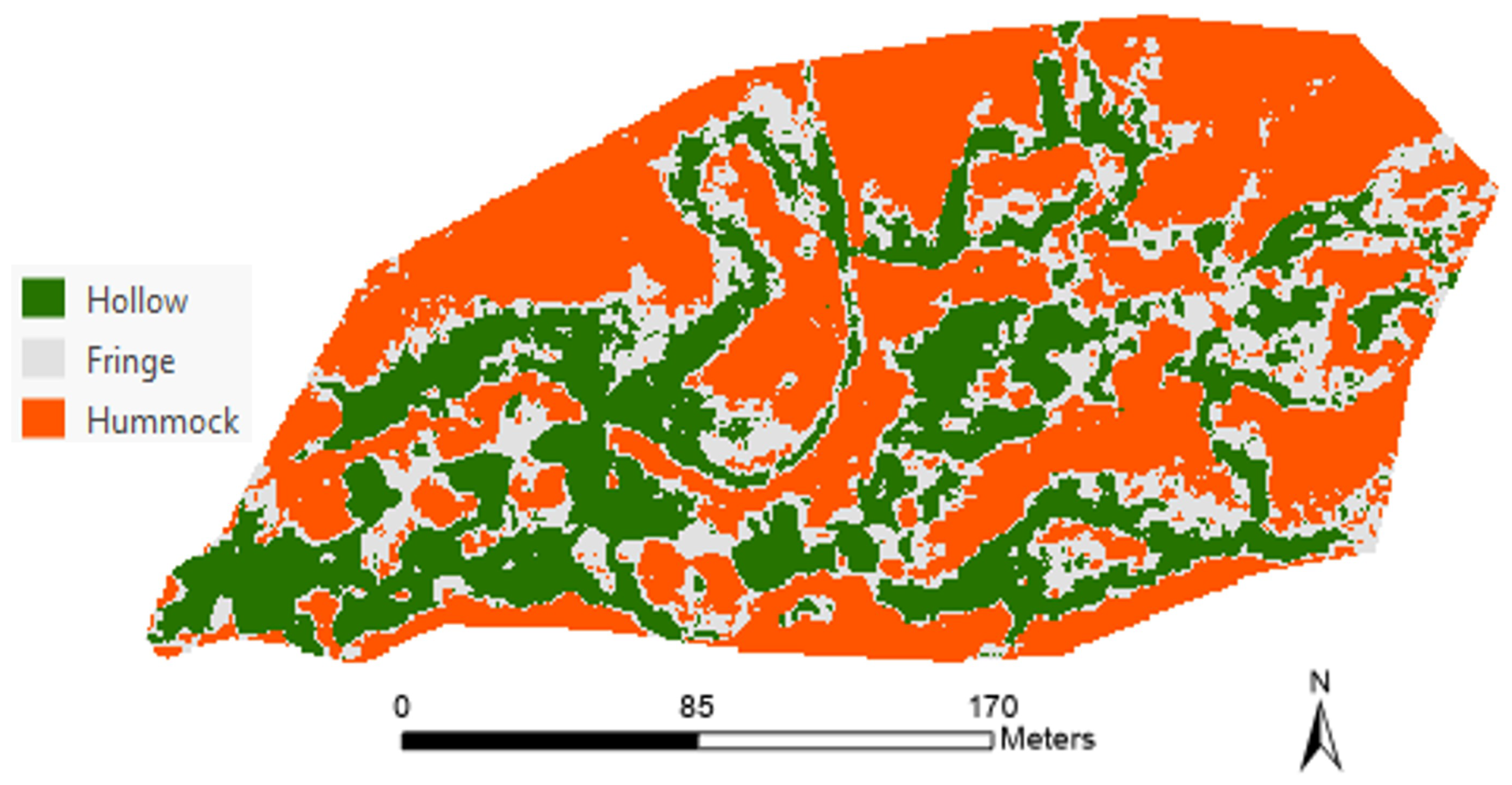
4.2. Microtopography Classification
4.2.1. Priority Flood Algorithm
4.2.2. WALET Method: Combining Water-Level and Elevation Thresholds
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ALS | Airborne Laser Scanning |
| ASL | Above Sea Level |
| CSF | Cloth Simulation Filter |
| DEM | Digital Elevation Model |
| DTM | Digital Terrain Model |
| GCP | Ground Control Points |
| GPS | Global Positioning System |
| IDW | Inverse Distance Weighted |
| RTK | Real-Time Kinematic |
| SfM | Structure from Motion |
| sUAS | Small Unmanned Aerial Systems |
| TFFW | Tidal Freshwater Forested Wetlands |
| TLS | Terrestrial Laser Scanning |
| WALET | Water-Level and Elevation Threshold |
References
- Adame, M.F.; Kelleway, J.; Krauss, K.W.; Lovelock, C.E.; Adams, J.B.; Trevathan-Tackett, S.M.; Noe, G.; Jeffrey, L.; Ronan, M.; Zann, M.; et al. All tidal wetlands are blue carbon ecosystems. BioScience 2024, 74, 253–268. [Google Scholar] [CrossRef] [PubMed]
- Karstens, S.; Jurasinski, G.; Glatzel, S.; Buczko, U. Dynamics of surface elevation and microtopography in different zones of a coastal Phragmites wetland. Ecol. Eng. 2016, 94, 152–163. [Google Scholar] [CrossRef]
- Graham, J.; Ricciuto, D.M.; Glenn, N.; Hanson, P.J. Incorporating microtopography in a land surface model and quantifying the effect on the carbon cycle. J. Adv. Model. Earth Syst. 2022, 14, e2021MS002721. [Google Scholar] [CrossRef]
- Diamond, J.S.; McLaughlin, D.L.; Slesak, R.A.; Stovall, A. Microtopography is a fundamental organizing structure of vegetation and soil chemistry in black ash wetlands. Biogeosciences 2020, 17, 901–915. [Google Scholar] [CrossRef]
- Lane, C.R.; Leibowitz, S.G.; Autrey, B.C.; LeDuc, S.D.; Alexander, L.C. Hydrological, physical, and chemical functions and connectivity of non-floodplain wetlands to downstream waters: A review. JAWRA J. Am. Water Resour. Assoc. 2018, 54, 346–371. [Google Scholar] [CrossRef] [PubMed]
- Rodríguez-Caballero, E.; Cantón, Y.; Chamizo, S.; Lázaro, R.; Escudero, A. Soil loss and runoff in semiarid ecosystems: A complex interaction between biological soil crusts, micro-topography, and hydrological drivers. Ecosystems 2013, 16, 529–546. [Google Scholar] [CrossRef]
- Ott, E.T.; Galbraith, J.M.; Daniels, W.L.; Aust, W.M. Effects of amendments and microtopography on created tidal freshwater wetland soil morphology and carbon. Soil Sci. Soc. Am. J. 2020, 84, 638–652. [Google Scholar] [CrossRef]
- Wolf, K.L.; Ahn, C.; Noe, G.B. Microtopography enhances nitrogen cycling and removal in created mitigation wetlands. Ecol. Eng. 2011, 37, 1398–1406. [Google Scholar] [CrossRef]
- Minick, K.J.; Mitra, B.; Li, X.; Fischer, M.; Aguilos, M.; Prajapati, P.; Noormets, A.; King, J.S. Wetland microtopography alters response of potential net CO2 and CH4 production to temperature and moisture: Evidence from a laboratory experiment. Geoderma 2021, 402, 115367. [Google Scholar] [CrossRef]
- Sallenger, A.H., Jr.; Doran, K.S.; Howd, P.A. Hotspot of accelerated sea-level rise on the Atlantic coast of North America. Nat. Clim. Chang. 2012, 2, 884–888. [Google Scholar] [CrossRef]
- Shukla, T.; Tang, W.; Trettin, C.C.; Chen, G.; Chen, S.; Allan, C. Quantification of microtopography in natural ecosystems using close-range remote sensing. Remote Sens. 2023, 15, 2387. [Google Scholar] [CrossRef]
- Graham, J.D.; Glenn, N.F.; Spaete, L.P.; Hanson, P.J. Characterizing peatland microtopography using gradient and microform-based approaches. Ecosystems 2020, 23, 1464–1480. [Google Scholar] [CrossRef]
- Kalacska, M.; Arroyo-Mora, J.P.; Lucanus, O. Comparing UAS LiDAR and Structure-from-Motion Photogrammetry for peatland mapping and virtual reality (VR) visualization. Drones 2021, 5, 36. [Google Scholar] [CrossRef]
- Stovall, A.E.; Diamond, J.S.; Slesak, R.A.; McLaughlin, D.L.; Shugart, H. Quantifying wetland microtopography with terrestrial laser scanning. Remote Sens. Environ. 2019, 232, 111271. [Google Scholar] [CrossRef]
- Musial, C.T.; Sawyer, A.H.; Barnes, R.T.; Bray, S.; Knights, D. Surface water–groundwater exchange dynamics in a tidal freshwater zone. Hydrol. Process. 2016, 30, 739–750. [Google Scholar] [CrossRef]
- Moore, P.A.; Lukenbach, M.C.; Thompson, D.K.; Kettridge, N.; Granath, G.; Waddington, J.M. Assessing the peatland hummock–hollow classification framework using high-resolution elevation models: Implications for appropriate complexity ecosystem modeling. Biogeosciences 2019, 16, 3491–3506. [Google Scholar] [CrossRef]
- Currier, W.R.; Pflug, J.; Mazzotti, G.; Jonas, T.; Deems, J.S.; Bormann, K.J.; Painter, T.H.; Hiemstra, C.A.; Gelvin, A.; Uhlmann, Z.; et al. Comparing aerial lidar observations with terrestrial lidar and snow-probe transects from NASA’s 2017 SnowEx campaign. Water Resour. Res. 2019, 55, 6285–6294. [Google Scholar] [CrossRef]
- Khanal, M.; Hasan, M.; Sterbentz, N.; Johnson, R.; Weatherly, J. Accuracy comparison of aerial lidar, mobile-terrestrial lidar, and UAV photogrammetric capture data elevations over different terrain types. Infrastructures 2020, 5, 65. [Google Scholar] [CrossRef]
- LaRue, E.A.; Wagner, F.W.; Fei, S.; Atkins, J.W.; Fahey, R.T.; Gough, C.M.; Hardiman, B.S. Compatibility of aerial and terrestrial LiDAR for quantifying forest structural diversity. Remote Sens. 2020, 12, 1407. [Google Scholar] [CrossRef]
- Murgoitio, J.; Shrestha, R.; Glenn, N.; Spaete, L. Airborne LiDAR and terrestrial laser scanning derived vegetation obstruction factors for visibility models. Trans. GIS 2014, 18, 147–160. [Google Scholar] [CrossRef]
- Trettin, C.C.; Czwartacki, B.J.; Allan, C.J.; Amatya, D.M. Linking freshwater tidal hydrology to carbon cycling in bottomland hardwood wetlands. In Headwaters to Estuaries: Advances in Watershed Science and Management; U.S. Department of Agriculture Forest Service: Asheville, NC, USA, 2016; p. 207. [Google Scholar]
- Anderson, K.; Bennie, J.; Wetherelt, A. Laser scanning of fine scale pattern along a hydrological gradient in a peatland ecosystem. Landsc. Ecol. 2010, 25, 477–492. [Google Scholar] [CrossRef]
- Baltensweiler, A.; Walthert, L.; Ginzler, C.; Sutter, F.; Purves, R.S.; Hanewinkel, M. Terrestrial laser scanning improves digital elevation models and topsoil pH modelling in regions with complex topography and dense vegetation. Environ. Model. Softw. 2017, 95, 13–21. [Google Scholar] [CrossRef]
- Diamond, J.S.; McLaughlin, D.L.; Slesak, R.A.; Stovall, A. Pattern and structure of microtopography implies autogenic origins in forested wetlands. Hydrol. Earth Syst. Sci. 2019, 23, 5069–5088. [Google Scholar] [CrossRef]
- Liao, C.; Li, H.; Lv, G.; Tian, J.; Xu, Y. Effects of ecological restoration on soil properties of the aeolian sandy land around Lhasa, southern Tibetan Plateau. Ecosphere 2020, 11, e03009. [Google Scholar] [CrossRef]
- Cianciolo, T.R.; Diamond, J.S.; McLaughlin, D.L.; Slesak, R.A.; d’Amato, A.W.; Palik, B.J. Hydrologic variability in black ash wetlands: Implications for vulnerability to emerald ash borer. Hydrol. Process. 2021, 35, e14014. [Google Scholar] [CrossRef]
- Zhang, X.; Meng, X.; Li, C.; Shang, N.; Wang, J.; Xu, Y.; Wu, T.; Mugnier, C. Micro-topography mapping through terrestrial LiDAR in densely vegetated coastal environments. ISPRS Int. J. Geo-Inf. 2021, 10, 665. [Google Scholar] [CrossRef]
- Puttonen, E.; Hakala, T.; Nevalainen, O.; Kaasalainen, S.; Krooks, A.; Karjalainen, M.; Anttila, K. Artificial Target Detection with a Hyperspectral LiDAR over a 24 Hour Measurement; SPIE-International Society for Optical Engineering: Bellingham, WW, USA, 2015. [Google Scholar]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Guo, Q.; Li, W.; Yu, H.; Alvarez, O. Effects of topographic variability and lidar sampling density on several DEM interpolation methods. Photogramm. Eng. Remote Sens. 2010, 76, 701–712. [Google Scholar] [CrossRef]
- Wu, Q.; Lane, C.R. Delineating wetland catchments and modeling hydrologic connectivity using lidar data and aerial imagery. Hydrol. Earth Syst. Sci. 2017, 21, 3579–3595. [Google Scholar] [CrossRef]
- Wang, L.; Liu, H. An efficient method for identifying and filling surface depressions in digital elevation models for hydrologic analysis and modelling. Int. J. Geogr. Inf. Sci. 2006, 20, 193–213. [Google Scholar] [CrossRef]
- Van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T. scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef] [PubMed]
- de Paula, M.D.; Groeneveld, J.; Huth, A. The extent of edge effects in fragmented landscapes: Insights from satellite measurements of tree cover. Ecol. Indic. 2016, 69, 196–204. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wetland/Forest Type | Wetland/Forest Location | Plot Area (m2) | Study | Reference |
|---|---|---|---|---|
| Peatland bog | Solway Plain, Cumbria, UK | 700 | Vegetation pattern | [22] |
| Long-termconifer forest | Alptal, Switzerland | 20,000 | Topsoil pH modeling dense forest (Alpthal, Switzerland) | [23] |
| Forested wetland | Northern Minnesota, USA | 900 | Microtopography hummock-based study in black ash wetland | [24] |
| Black ash wetlands | Northern Minnesota, USA | 700 to 1200 | Identifying hummock features in wetlands | [14] |
| Spruce and peatland forest | Minnesota, USA | 65 | Characterizing peatland microtopography | [12] |
| Temperate forest | Tibet, China | 10,000 | Microtopography of alluvial fan | [25] |
| Black ash wetlands | Minnesota, USA | 700 to 1200 | Tree biomass, soil chemistry | [4] |
| Black ash wetlands | Minnesota, USA | 300 | Hydrologic variability | [26] |
| Restored wetland | Louisiana, USA | 9500 | Vegetation pattern | [27] |
| Ombrotrophic peat bog | Marcell Experimental Forest, MN, USA | 12 | Microtopography and Carbon cycle | [3] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shukla, T.; Tang, W.; Trettin, C.C.; Chen, S.-E.; Allan, C. Determination of Microtopography of Low-Relief Tidal Freshwater Forested Wetlands Using LiDAR. Remote Sens. 2024, 16, 3463. https://doi.org/10.3390/rs16183463
Shukla T, Tang W, Trettin CC, Chen S-E, Allan C. Determination of Microtopography of Low-Relief Tidal Freshwater Forested Wetlands Using LiDAR. Remote Sensing. 2024; 16(18):3463. https://doi.org/10.3390/rs16183463
Chicago/Turabian StyleShukla, Tarini, Wenwu Tang, Carl C. Trettin, Shen-En Chen, and Craig Allan. 2024. "Determination of Microtopography of Low-Relief Tidal Freshwater Forested Wetlands Using LiDAR" Remote Sensing 16, no. 18: 3463. https://doi.org/10.3390/rs16183463
APA StyleShukla, T., Tang, W., Trettin, C. C., Chen, S.-E., & Allan, C. (2024). Determination of Microtopography of Low-Relief Tidal Freshwater Forested Wetlands Using LiDAR. Remote Sensing, 16(18), 3463. https://doi.org/10.3390/rs16183463