1. Introduction
Single tree measurements are, in their elementary form, the smallest component of forest surveying, and yet they form the basis of our understanding of the forested areas of the world. These observations describe the physical dimensions and characteristics of individual trees, including (but not limited to) age, species, stem diameter, height, form condition, and crown characteristics [
1]. Capturing these observations of individual trees in forest inventories provides the information needed to make inferences about larger groups of trees, from the stand to the landscape level [
2]. Two of the most important individual tree measurements in forest inventories are diameter at breast height (DBH) and tree height. DBH is a simple measure of cross-sectional diameter measured at 1.3 m on the stem from the highest point on the ground around the base of the tree stem [
3,
4]. Tree height and DBH are key factors in equations for estimating timber volume, which, together with tree species composition, is a major focus of most forest inventories [
5,
6,
7]. Tree volume is crucial for the assessment of aboveground biomass, which helps forests absorb carbon from greenhouse gas emissions [
8,
9,
10,
11]. While DBH and tree height measurements are of great importance in volume estimates, tree crowns are one of the most visible features of trees and often serve as visual indicators of tree vigour or health. Their crown shape influences forest conditions and provides energy requirements, making crown measurements valuable for forest modelling [
12,
13].
1.1. Conventional Techniques for Tree Measurements
The tools used for traditional single tree measurements in the field can range from simple diameter-corrected measuring tapes and tree callipers to the mechanically more complex optical relascope and laser and ultrasonic hypsometers with transponders for trigonometric or geometric height calculations [
2]. Although DBH is a relatively easy feature to measure, the difficulty of measuring other individual tree attributes increases the higher they are on the tree stem. Even for trained professionals, factors such as topography, tree shape, tree species, stand complexity occlusions, and the method used to calculate height can affect the accuracy of tree height measurements. Studies have shown that heights are both under and overestimated in field measurements [
14,
15,
16]. Locating the top of the tree for height measurement and estimating canopy cover are challenging, with more time-saving methods often leading to high variability and bias [
17]. A common but important attribute of a tree is the species (or other taxonomic unit). However, as there are approximately 73,000 tree species on earth [
18], it can be challenging to identify trees with 100% certainty in areas with high species richness, different stand ages, and seasons, even in areas familiar to forestry professionals. While crown characteristics, DBH, tree species, and tree height can be determined on standing trees, some attributes require destructive sampling, such as harvesting trees for taper and aboveground biomass equations [
19,
20,
21]. Conventional methods for measuring individual tree attributes have evolved over the years, e.g., the move away from tape and angle devices for height measurement to the widespread acceptance of laser hypsometers as the new standard for height measurement. Despite technological advances, these methods remain time and labour-intensive compared to remote sensing techniques.
1.2. Remotely Sensed Tree Measurements
Remote sensing techniques have made a significant contribution to the measurement of individual trees and play a crucial role in how we will continue to measure our forests in the future. The main incentives for the use of remote sensing data in forestry are higher measurement accuracy and lower effort in relation to the final result [
22]. Some of the first applications of remote sensing in forestry were in the 1950s in the form of black-and-white aerial photographs of forests in Central Europe [
23]. Today, digital aerial photogrammetry still provides valuable three-dimensional (3D) forest data [
24]. Photogrammetry has also evolved terrestrially in conjunction with computer vision techniques. Structure from Motion (SfM) is a computer vision principle in which 3D models are created from a series of overlapping 2D images. This technique is widely used in forestry to create 3D models of individual trees. In addition, RGB cameras capture colour images that can be used in SfM to create 3D models, but they often have problems with complex forest environments where light conditions and dense tree canopies can obscure details [
25]. Depth cameras, on the other hand, capture spatial information directly and measure the distance to different surfaces in the scene. This technology could enable more precise measurements of tree features, especially when combined with photogrammetric methods.
Forestry has also kept pace with new and emerging technologies and trends in Light Detection and Ranging (LiDAR) in the form of airborne (ALS), spaceborne (SLS), terrestrial (TLS), mobile (MLS), and personal laser scanning (PLS) systems [
26]. The accuracy of terrestrial LiDAR methods for measuring individual trees is dominated by static TLS systems. With an accuracy of less than one centimetre in diameter, they are often used as a benchmark for other remote sensing methods [
26,
27]. TLS systems are used extensively for non-invasive measurement of single tree features [
28] and in some cases to measure features that would otherwise require destructive sampling [
29,
30]. However, TLS systems can be expensive (from USD 7000 and rising rapidly) and their transport and deployment in the forest can be cumbersome. For these reasons, interest in smaller and portable remote sensing instruments for forest measurements has increased.
1.3. Study Objectives
Mobile devices (smartphones, tablets, or similar devices) have a firm place in our cars as navigation devices, on our desks as appointment planners and alarm clocks, and as the primary means of communication in our hands. Now, they are also finding their way into forestry as measuring devices. Mobile devices are equipped with RGB cameras of sufficient quality and configuration for close-range photogrammetry techniques, depth sensors, and, in some cases, LiDAR scanners, making them a natural and practical solution for forest measurements. For example, although smartphones have been mentioned in reviews, e.g., Liang et al.’s [
26] excellent comprehensive review of close-range remote sensing, there has been no dedicated literature review to quantify their place in close-range remote sensing of single tree features. The purpose of this review is to present the current state of mobile devices in the measurement of individual trees and to serve as a starting point for evaluating the rapidly growing interest in close-range remote sensing using smartphones or tablet PCs. Our aims in this review are to (i) compile and present all single tree attributes measured with mobile devices, (ii) present the technologies and applications used to achieve the results, (iii) report on the measurement accuracy of single tree attributes measured with mobile devices, and (iv) explore the barriers to implementing these solutions in practice. This review covers all studies of acceptable vigour that examine terrestrial measurements of individual trees using mobile devices (i.e., smartphones were the primary measurement device) or apps specifically designed to measure tree attributes. Acceptable attributes must have measurements that relate to the physical dimensions or descriptions of the tree itself—not fruiting bodies or reproductive structures. Our aim was to narrow our literature search to focus specifically on forest science and avoid overlap with related fields such as agroforestry, agriculture or computer vision studies that recognise and classify fruits on apple, avocado, and olive trees.
2. Review Approach
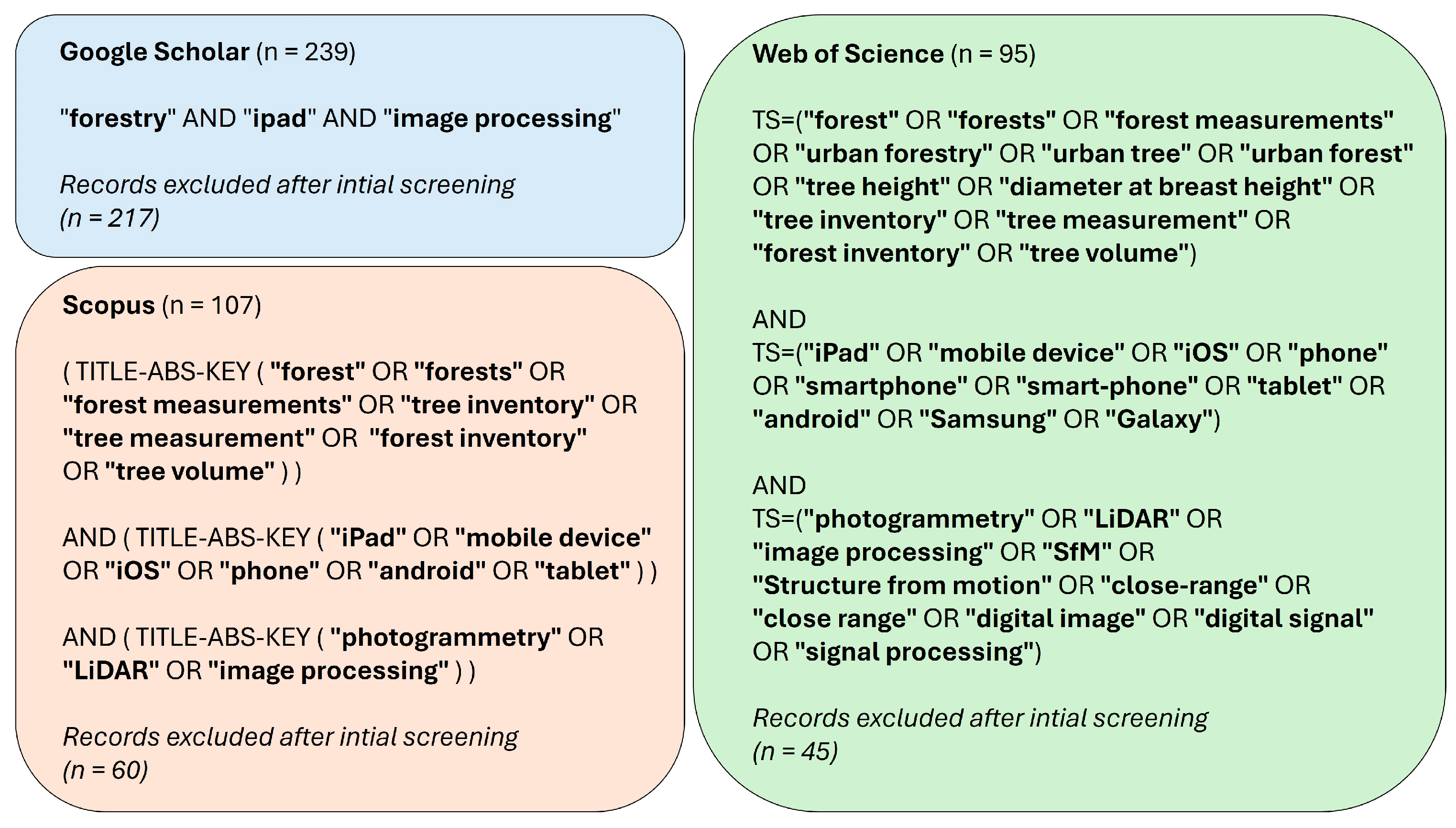
The literature screening, which was conducted in November 2023, included three databases, namely Google Scholar, Scopus, and Web of Science. A structured approach was adopted in this literature search, where keywords were added incrementally from one database to another, starting with the most comprehensive database, Google Scholar. The keywords identified from the relevant articles in this review were then used to refine the search in Scopus, and finally, keywords were added for the Web of Science database search. The query structures were designed to contain three main components, described by OR operators and joined by AND statements: (1) the subject of the review, example: “forest” OR “tree measurement”, (2) the target mechanism of the review, example: “iPad” OR “smartphone”, and (3) the sensory principles or methods used by the mechanism, example: “photogrammetry” OR “LiDAR” (
Figure 1).
A total of 441 studies were identified across all databases and each record was manually screened for suitability for the literature review. The results of the post-review identified 34 papers that directly matched all facets of the scope of this review, as well as two papers that were not found in the query but were added based on expert judgment [
31,
32]. The applicable literature ranges from 2015 to 2023, with almost 76% of the papers (26) published in or after 2020.
Figure 2 illustrates the comprehensive search and screening strategy applied to identify relevant literature on the application of iPads and mobile devices in single tree measurement and image processing in three major databases: Google Scholar, Scopus, and Web of Science. For each database, specific search terms were used to capture studies related to single tree measurements, mobile devices, and image processing technologies such as photogrammetry and LiDAR. Google Scholar identified 239 entries, of which 217 were excluded after an initial review. Scopus provided 107 entries, of which 60 were excluded after an initial review. Web of Science provided 95 entries, of which 45 were excluded after initial screening. The reduced inclusion criteria ensured a focused and relevant collection of studies that enabled a robust review of the current state of the art in forestry applications.
This overview is divided into six sections. The first section deals with various sensor technologies used by mobile devices. This is followed by the methods of data acquisition and processing. This is followed by individual tree attributes, which are categorized into six groups. The following section looks at the challenges and barriers to implementation. The review then offers a discussion and an outlook for the future. Finally, the review concludes with a summary of the key findings.
3. Sensing Techniques
3.1. Passive Sensing
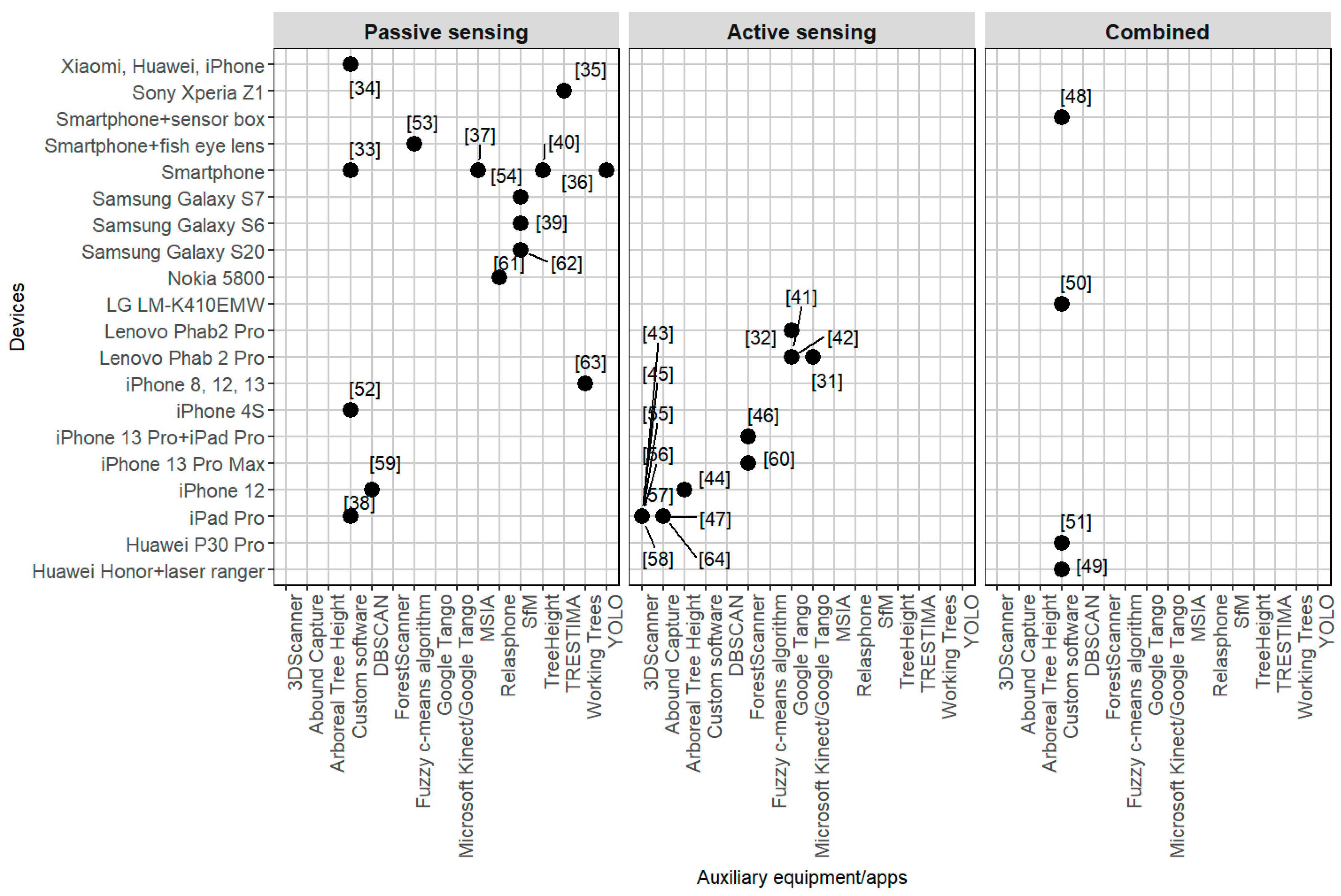
In all 15 studies, smartphone-mounted cameras (including RGB, RGB-D, and fisheye cameras) were used to capture images of trees (
Figure 3). Of these, 37.4% used image analysis techniques and 29.0% used internal apps to analyse the images and determine tree attributes such as DBH (33.2% of the papers), height, biomass, volume, tree species, stem damage, and other tree attributes. Approximately 33.1% of the studies analysed focused on estimating DBH and BA. For example, Putra et al. [
33] showed the effectiveness of terrestrial photography for DBH measurement and demonstrated its efficiency and accuracy. Similarly, Wu et al. [
34] illustrated the suitability and applicability of smartphone-based photogrammetry for DBH estimation. BA estimation, which is often associated with DBH measurements, has received considerable attention, as shown by Vastaranta et al. [
35], who used passive optical data and allometric modelling to improve accuracy. Overall, the successful application of mobile devices using RGB imagery and photogrammetric techniques has emphasized their crucial importance for forest inventory and management, as they provide efficient and accurate alternatives for measuring DBH and BA.
Furthermore, passive sensing technologies play a crucial role in estimating tree height, another essential attribute for understanding forest structure and dynamics. About 25.3% of the reviewed studies focused on tree height estimation, reflecting its importance in forestry research. For example, Putra et al. [
33] demonstrated the accuracy of terrestrial photography in capturing vertical forest structures. In addition, Xuan et al. [
36] presented smartphone-based methods for deriving tree height estimates, which are particularly beneficial for the assessment of urban forests. The emphasis on tree height estimation shows its importance, with passive sensor technologies providing scalable, accurate, and efficient solutions for height estimation.
Passive sensing has also proven helpful in species identification and facilitates biodiversity conservation, forest management, and ecological studies. About 21% of the reviewed studies emphasized the efficiency of passive sensing technologies in species identification. For example, Kong et al. [
37] proposed a smartphone-based method, the multilayer mangrove species identification method (MSIA), for automatic identification of mangrove tree species based on leaf shape captured by smartphone cameras. Daliman and Ghapar [
38] also investigated smartphone-integrated computer vision for tree species identification to improve the efficiency and accuracy of monitoring. These studies emphasize the ability of smartphone-based passive sensing technologies to facilitate species identification in different forest environments, thereby supporting ecological and conservation efforts.
In addition, passive data collection is crucial for 3D reconstruction and analysing point clouds that enable precise surveying and assessment of forest structures. Approximately 11% of the reviewed studies addressed the application of passive sensing technologies for these purposes. For example, Marzulli et al. [
39] have shown that it is possible to create dense point clouds of forest plots using smartphone images and SfM algorithms, allowing non-destructive measurement of tree diameters and volumes. Similarly, Shen et al. [
40] proposed a method for measuring tree height based on 3D reconstruction using smartphone cameras and deep learning methods, ensuring accurate measurements over a wide shooting distance range. These studies show the potential of passive sensing technologies, especially smartphone-based systems, to improve the efficiency and accuracy of 3D reconstruction and point cloud analysis in forest environments, providing valuable insights for forest inventory purposes.
3.2. Active Sensing
Mobile devices equipped with active sensing technologies such as LiDAR and augmented reality (AR) were included in our study. Sixty per cent of studies used iPads, while 26.7% and 13.3% utilized tablets and smartphones, respectively. Internal apps were used in 66.7% of studies to analyse the collected data, with two studies specifically testing Google Tango [
32,
41,
42] (
Figure 3). All studies estimated DBH across various forest types and also assessed tree height, crown parameters, tree positions, and distances between trees. These devices also represented a promising alternative to traditional forest measurement methods. The 15 studies analysed showed a wide range of applications and methods of active sensing that have proven to be reliable in forest inventories. One of the most important applications of active sensing is the estimation of quantitative attributes such as DBH and BA of individual trees. Most of the reviewed studies (65.8%) focused on the estimation of DBH. For example, Fan et al. [
41] demonstrated the effectiveness of MLS with RGB-D SLAM for real-time DBH measurement, achieving unbiased estimates of tree position and accurate DBH estimates. Similarly, Çakir et al. [
43] investigated the use of hand-held LiDAR technology and demonstrated accurate DBH estimation with low residual errors in both urban and experimental forests. Overall, these results emphasize the feasibility of consumer devices such as smartphones and tablets equipped with LiDAR sensors for estimating DBH and BA. Such advances play a critical role in advancing the estimation of DBH and BA by making it more accessible and cost-effective while maintaining measurement accuracy.
Tree height estimation is a fundamental component of forest inventory. Recent advances in active sensing technologies such as smartphone LiDAR and LiDAR-equipped consumer devices have revolutionized this aspect of forest structure. About 73.3% of the studies reviewed addressed tree height estimation and emphasized its crucial role in understanding forest structure. The studies by Pace et al. [
44] and Gollob et al. [
45] demonstrated the potential of these technologies to provide accurate and scalable tree height estimation solutions. Pace et al. [
44] demonstrated the accuracy of smartphone LiDAR in detecting vertical forest structures and provided reliable estimates of tree height. On the other hand, Gollob et al. [
45] investigated the potential of consumer devices, particularly the Apple iPad Pro, equipped with LiDAR sensors in efficiently measuring tree parameters, including height. Their research emphasizes the possibility of using such devices to make precise measurements of tree height and thus facilitate forest inventories. These studies collectively highlighted the importance of active sensor technologies based on smartphones for comprehensive tree height estimation.
None of the 15 studies analysed specifically addressed the identification of tree species using active sensor technologies. While these studies focused on various tree attributes, such as DBH, BA, and tree height measurement, none focused on the application of active sensing technologies for species identification. However, detecting species based on point clouds is challenging as the data is sparse and lacks the detail required for accurate identification. Point clouds are often noisy and incomplete, and usually lack colour and texture, making it difficult to distinguish between species with similar shapes. These limitations make accurate species identification based on point clouds alone complex and less reliable. This gap highlights a potential area for future research and development in the application of active sensing in forest science.
Of the 15 studies reviewed, almost 47% focused on 3D reconstruction and analysing point clouds using active sensor technologies. These studies looked at devices such as smartphones and tablets equipped with LiDAR sensors or other depth-sensing technologies to create detailed 3D models of the forest environment. For example, Tatsumi et al. [
46] introduced ForestScanner, a mobile application that enables forest inventories via iPhones or iPads with built-in LiDAR sensors, providing real-time stem diameter measurements and spatial coordinate estimates. Similarly, Bobrowski et al. [
47] investigated the use of LiDAR scanner applications on the iPad Pro for measuring stem perimeter and determining the position of tree trunks in urban parks, indicating a promising potential for low-cost and applicable 3D data collection methods in forest inventory and management. These studies contribute to the growing body of research on the application of active sensing for comprehensive forest analyses.
3.3. Combination of Passive and Active Sensing
The use of mobile devices combining active and passive sensing techniques has shown significant potential for estimating tree characteristics and offers innovative and practical solutions for analysing forest resources, as mentioned in four studies. Most of these studies (three in total) focused primarily on DBH estimation, but also considered tree height and crown attributes. However, Fan et al. [
48] proposed a method that integrates high-precision position sensors and laser ranging modules and allows accurate measurement of tree parameters such as height and DBH. Their results showed promising accuracy (i.e., BIAS of 1.08% and 1.78% for height and DBH, respectively), with relative deviations in tree position and relatively low RMSE values for both height and DBH measurements (i.e., RMSE of 7.43% and 6.39% for height and DBH, respectively). Shao et al. [
49] introduced a non-contact method for DBH measurement by combining passive smartphone imaging with active laser range finding. Their approach, which was validated for different tree species and environmental conditions, demonstrated good agreement with conventional contact methods with an absolute mean error (MAE) of 1.12 cm and an RMSE of 1.55 cm, emphasizing its cost-effectiveness, portability and accuracy. Kędra and Barbeito [
50] utilized single-image photogrammetry with smartphone cameras to assess the architecture of Norway spruce trees. They achieved reliable DBH measurements and provided valuable insights into the dynamics of forest structure. In addition, Holcomb et al. [
51] developed an algorithm that utilized smartphone LiDAR sensors for automatic stem diameter estimation and showed robust performance in different forest areas and seasons. These studies demonstrate the potential of mobile device-based sensor technologies to revolutionize forest inventory and monitoring practices by providing accessible, efficient, and accurate solutions for estimating tree characteristics. The specific accuracies that can be achieved for the estimation of individual tree attributes based on the discussed work will be discussed in more detail in
Section 5. To summarise, mobile device-based sensing technologies provide reliable tools for forest management and monitoring. Passive sensing methods are easily accessible and simple to use, active sensing methods allow for more accurate quantitative measurements, and combined approaches aim at comprehensive data collection.
4. Data Collection and Processing
4.1. Data Collection
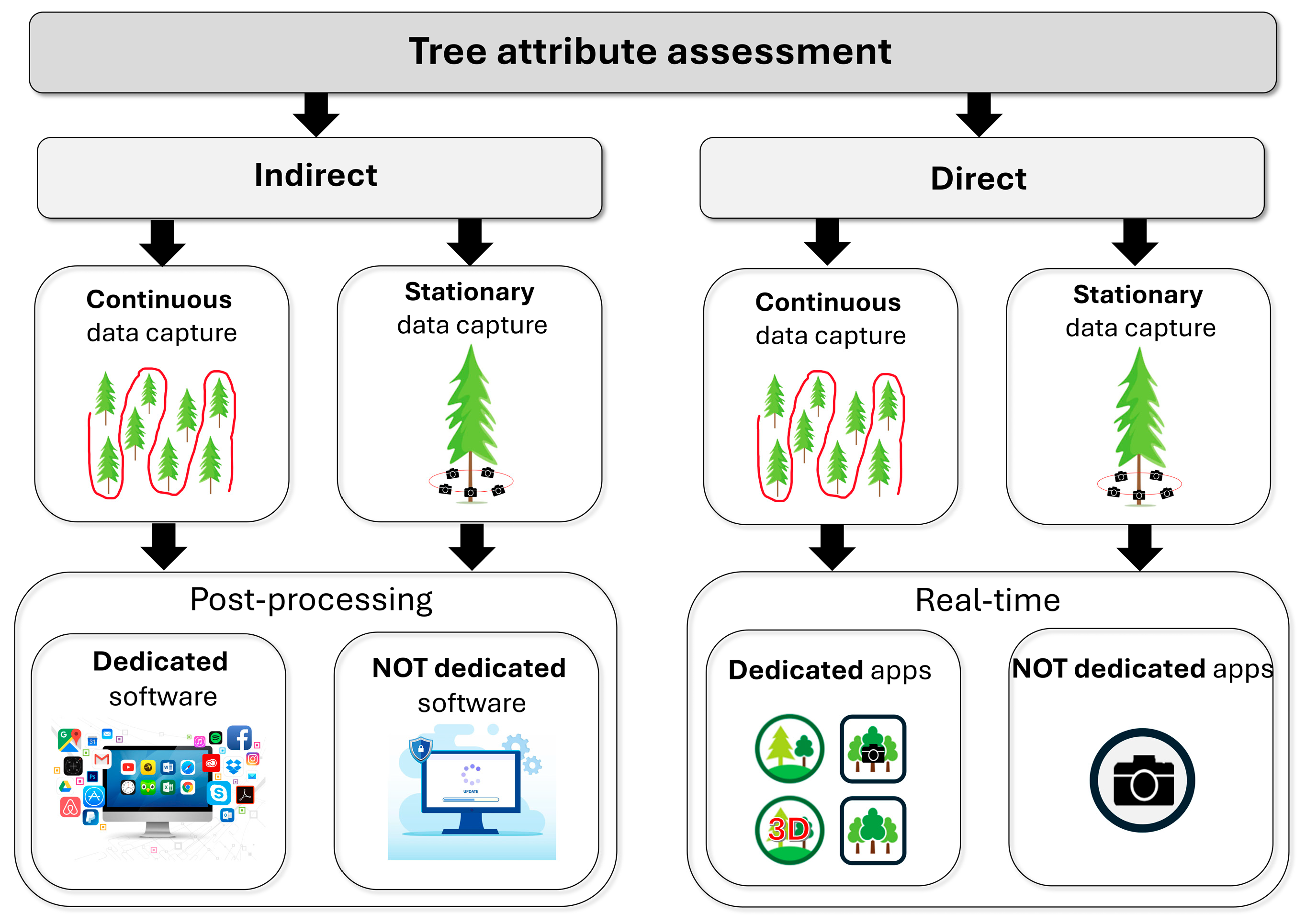
A key aspect related to the use of mobile devices to collect tree and forest stand characteristics is the methodology of data collection, which significantly affects the possibility of subsequent replication of research and potential operational use in forestry. In this study, the methodological aspect was analysed considering both indirect and direct methods used to estimate tree characteristics (
Figure 4). In general, indirect methods refer to works in which data (e.g., images, videos, or point clouds) were collected during field surveys and later analysed using standard or customised software to estimate tree attributes. In contrast, direct methods refer to work in which the data collected during the field survey is entered directly into the apps installed on the devices used, which then provide the tree attributes.
4.1.1. Indirect Data Collection
Indirect measurement methods can be divided into stationary and continuous categories. Stationary methods require the operator to capture image/images or scans from fixed locations to obtain high-resolution data from stationary objects. The data collected in this way can then be processed using single image processing (SIP) techniques, where information about tree attributes (such as height or DBH) is extracted from individual images of trees [
34,
49,
50,
51,
52,
53]. A slightly different but widely used method of stationary data acquisition is to capture multiple images of a single object (i.e., a tree) from different perspectives. The image data obtained in this way (overlapping images), processed with SfM algorithms, enable the generation of detailed 3D models and are therefore suitable for capturing forest inventory parameters and the spatial structure of trees [
38,
39,
54].
In contrast, continuous data collection requires moving through the environment to collect data. A mobile technology that has recently gained popularity for continuous data collection is Simultaneous Localization and Mapping (SLAM), a technique that enables the estimation of relative positions in an unknown environment [
48]. Due to its independence from the GNSS signal, this is a practical method for data collection in a forest area [
41]. This method of data collection is very commonly used with devices equipped with a LiDAR sensor to continuously collect spatial data, resulting in detailed 3D point clouds [
45,
55,
56,
57,
58]. With the technological advancement and the development of SLAM algorithms, the technology can now be used with devices without a LiDAR sensor. Fan et al. [
41] presented an approach for estimating tree attributes and positions using a smartphone with RGB-D SLAM. For passive remote sensing techniques, an example of continuous data acquisition is the recording of high-quality videos, which can then be processed by extracting individual images and generating a 3D point cloud [
59]. While continuous data collection can be challenging under certain conditions, it enables the collection of extensive spatial data over large areas, which is particularly useful in dynamic environments such as forests.
4.1.2. Direct Data Collection
The increasing popularity of mobile devices for measuring trees and forest stands has led to the development of various mobile applications specifically designed for data collection and forest measurements. However, the remote sensing data required for these applications can be collected using either stationary or continuous methods, as explained in
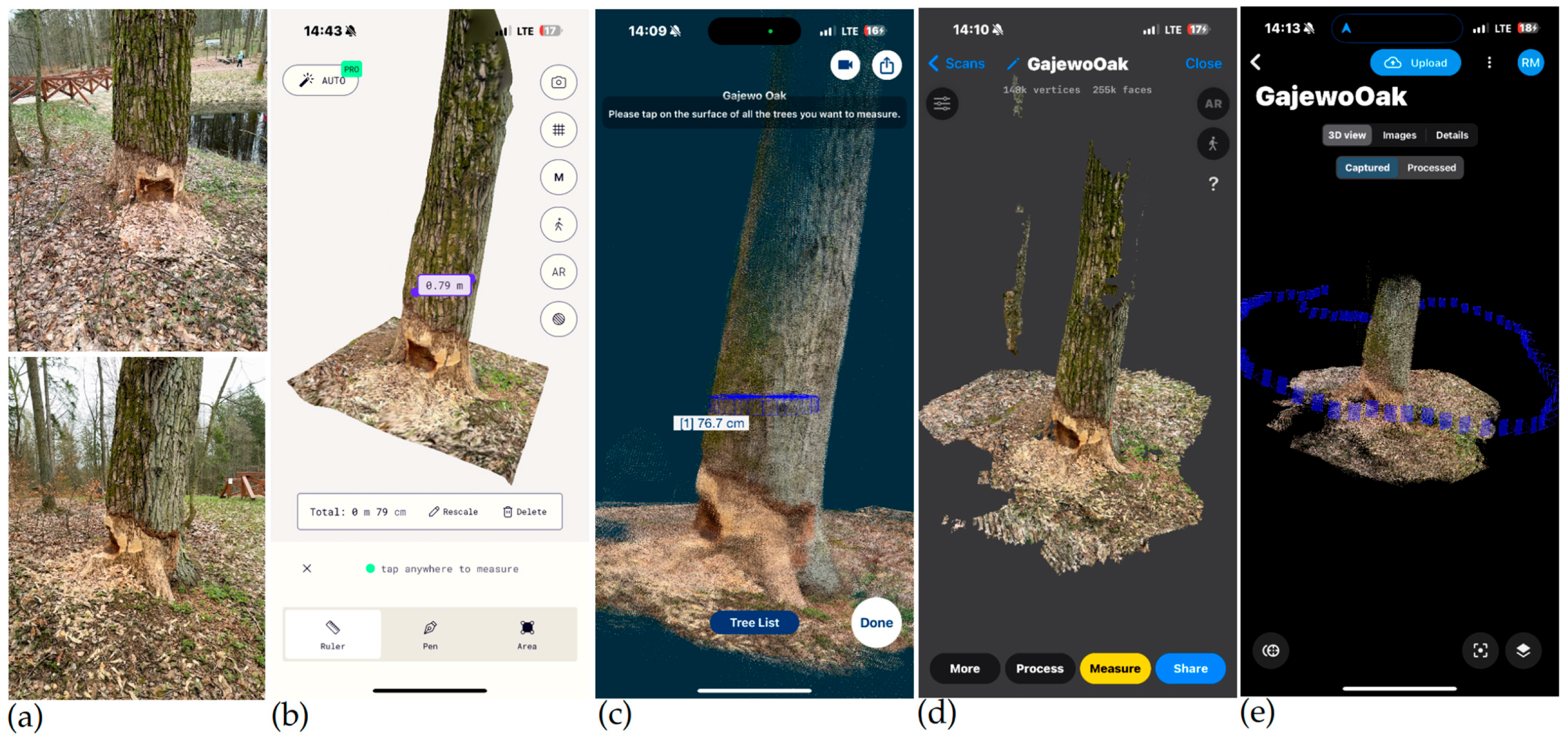
Section 4.1.1. ForestScanner, which is tailored to forestry applications, enables the measurement of tree attributes and forest inventory parameters (e.g., DBH), thus simplifying data collection through automatic measurements and real-time analyses [
60] (
Figure 5c). In the context of passive remote sensing applications, Relasphone is noteworthy for capturing forest inventory measurements and estimating biomass in the field [
61]. Another example of an application developed specifically for forestry purposes is TRESTIMA
TM, which estimates basic tree parameters, including BA, diameter, and height of trees with mean BA, by analysing images captured with a smartphone [
35]. It is important to note that researchers often use widely available applications that are not intended for forestry measurements. Among the active remote sensing techniques, the 3D Scanner application is particularly popular, allowing the acquisition of spatial data using LiDAR sensors (
Figure 5d). The acquired data in the form of point clouds or 3D models are processed in external software to extract tree attributes such as height and DBH [
45,
55,
56,
57,
58].
On the other hand, there are methods that do not require special applications and rely on built-in sensors such as the smartphone camera and pre-installed software (without additional specialised data collection applications). The photos of whole trees or their individual parts, such as trunks [
38,
39] and crowns [
44], are then processed with external software or subjected to visual analysis. This type of data collection offers convenience and flexibility in capturing detailed environmental aspects.
Table 1 compares eight different applications developed for measuring and analysing different attributes of individual trees. These applications can capture DBH, height, position within a forest plot, volume, species identification, crown dimensions, and the creation of point clouds for 3D modelling. Each application listed in the table has different capabilities. ForestScanner and Abound Capture, for example, specialise in point cloud generation, while TRESTIMA
TM and Working Tree offer DBH and height estimation. The Relasphone application has the potential to measure DBH but was used for BA estimation.
Table 1 helps users select the most appropriate application depending on the specific tree measurements they need to take.
4.2. Data Processing
This section analyses the different processing methods used to extract tree characteristics from the data collected by mobile devices. The analysed works can be roughly divided into two main groups based on the input data: image-based and point cloud-based.
4.2.1. Image Processing
The localization of trees and their stems in images is a crucial initial step for subsequent measurements. While some studies [
48,
50] rely on manual selection of points of interest on a screen, most methods are based on automatic tree detection. Several authors have proposed their own segmentation algorithms based on pixel attributes. Putra et al. [
33] used binary thresholding based on HSV colour space values, while Song et al. [
53] implemented a novel superpixel clustering algorithm to identify the highest and lowest tree points. Wu et al. [
34] used an algorithm for contour detection with binary thresholding, where the segmentation masks were further refined with morphological operations. Deep learning approaches were also used for tree detection. Shao et al. [
49] trained a custom segmentation model to identify tree trunk pixels in images, while Xuan et al. [
36] used the YOLOv5 object detection model to localize trees with bounding boxes.
In addition to tree location, estimation of individual tree attributes was the goal of some studies that relied on image processing. Pixel-based tree measurement techniques utilize camera and image parameters to measure tree parameters directly from image pixels. This approach usually requires knowledge of the camera’s field of view and the distance to the tree, whereby the distance information is usually captured with an additional laser sensor. The underlying principle is based on establishing a relationship between the pixel size of an object in the image and its real dimensions using various geometry-based calculations. Various researchers have refined this basic concept to improve accuracy and applicability. Celes et al. [
52] have introduced calibration techniques for the Instance Field of View, Kędra et al. [
50] have included geometric corrections for camera tilt, while Molinier et al. [
61] have adapted the traditional relascope principle to digital images.
A related class of approaches [
40,
41,
51] perform measurements by combining a single image with a corresponding depth map, utilizing the depth estimation cameras available in certain smartphones. These depth maps can be used for direct pixel-based measurements, but also to support tree segmentation. In the work of Shen et al. [
40], the depth map was not created with a dedicated sensor, but with ARCore software version 1.36.0, which estimates depth based on motion, in combination with MidasNet, a deep learning model for depth estimation of single images. This work shows that working with depth maps can be a feasible strategy even without dedicated hardware.
An alternative approach that does not require depth information is to use reference objects of known size photographed next to the tree of interest. Xuan et al. [
36] proposed a method using people as a reference, where both the person and the tree are recognized with the YOLOv5 model and the tree size is derived using the bounding box proportions. Vastaranta et al. [
35], on the other hand, used a measuring stick placed on the tree as a reference.
4.2.2. Point Cloud Processing
The second group of approaches performs tree measurements based on 3D point clouds. Most point cloud processing pipelines include several pre-processing steps, typically consisting of noise removal and ground filtering. Noise removal methods include Statistical Outlier Removal [
32,
57,
59], straight-pass filtering [
59], and RGB filtering to remove sky points [
57]. Ground filtering methods include the Cloth Simulation Filter [
43,
57,
58], the morphological filter and linear interpolation [
56], or manual filtering [
31].
Individual trees in point clouds can be identified using different methods. Some researchers [
38,
43,
47] implemented manual identification methods, while others used clustering methods such as DBSCAN [
45,
59]. Advanced approaches use deep learning models, as exemplified by [
46] in their ForestScanner app, which uses YOLACT++ to segment individual trees.
Once individual trees are identified, various attributes can be extracted. While some authors [
32,
54] extracted the attributes manually using point cloud visualisation software, most papers included automated solutions. The DBH of trees was typically extracted using different variants of circle fitting, including least squares [
46], Convex Hull [
47], or Randomized Hough transform [
43]. Woo et al. [
63] conducted a comparative study of four circle fitting methods: least squares circle, minimum enclosing circle, convex hull, and least squares ellipse. Their results showed that the least-squares circle and minimum enclosing circle achieved the best results depending on the stand, while the least-squares ellipse showed significantly larger errors. DendroCloud, a programme developed by Mokroš et al. [
64] and used by Wang et al. [
55], offers five different methods for estimating tree diameter. An advanced approach by Song et al. [
59] is to convert individual tree point clouds into a Qualitative Structure Model (QSM), more precisely AdQSM. This model represents a tree as a hierarchical structure consisting of stacked cylinders. QSM can be used to automatically extract variables such as trunk volume, branch volume, trunk length, branch length, and number of branches.
Finally, this section lists the different and evolving methods for processing data from mobile devices in forestry applications. Both image-based and point cloud-based approaches are efficient for accurately measuring trees, with ongoing developments in automation and deep learning techniques further enhancing their capabilities.
5. Single Tree Attributes
In the selected papers, different types of mobile devices were used to estimate the attributes of individual trees in different types of forest ecosystems, including managed forests, urban forests, agroforests, mixed old-growth forests, parks, and recreational forests. Tree height, DBH, BA, volume, tree position, and distance from reference measurements were quantitatively assessed based on root mean square error (RMSE), mean error (ME), residual error, or goodness of fit. These results are summarized in
Table 2. Additionally,
Table 2 provides an overview of the different devices and applications used to measure tree attributes such as DBH, height, BA, volume, species identification, tree damage, position, and crown dimensions. It highlights a range of field measurement methods, including the use of callipers and tapes, and advanced technologies such as TLS, UAV Lidar, and the Global Navigation Satellite System (GNSS), which is considered ground truth. The devices used to estimate each tree attribute range from smartphones to tablets (e.g., iPhone, iPad, Samsung Galaxy) equipped with specialized apps (e.g., TRESTIMA
TM, Relasphone).
5.1. Diameter Breast Height (DBH)
Most of the papers analysed (i.e., 25 papers) focused primarily on investigating the accuracy of DBH measurements. There was considerable variability in the RMSE. The least accurate estimate in one of the papers we examined had an RMSE of 21%. Apart from this, the average RMSE% was ~7.1%. For devices with medium to high accuracy and improved image processing, the RMSE% of DBH varies between 2.3% and 10.8%. Çakir et al. [
43] argued that the iPad Pro LiDAR sensor achieved more accurate DBH estimates with an RMSE of 2.90 cm compared to TLS, which had a residual error of 4.8 cm. Similarly, Tomaštík et al. [
32] reported that the Google Tango Lenovo Phab 2 Pro with an RGB depth sensor achieved an accuracy of ≤2 cm. These estimates are based on the acquisition of individual tree images. In contrast, Wu et al. [
34] introduced and implemented an algorithm capable of accurately extracting and estimating the DBH for multiple neighbouring trees. They achieved an RMSE of 0.21 cm and an average relative error of 2.3%, demonstrating the promising potential of handheld devices to complement traditional and alternative DBH measurement methods.
5.2. Height
The reported RMSE for indirect height estimates ranged from 1.08% to 11%, depending on factors such as the reference measurement, the methods of photo acquisition and the height extraction algorithms used. For example, Fan et al. [
41] and Xuan et al. [
36] reported RMSE values of 0.15 m (1.08%) and <0.43 m (4.96%), respectively. Fan et al. [
41] used a total station to measure the height of the reference trees, while Xuan et al. used a UAV equipped with depth sensors. When comparing the height differences measured with an electronic hypsometer with the height estimates from the TRESTIMA
TM app, Vastaranta et al. [
35] reported RMSE values ranging from 5.2% to 11.6%. They attributed this variability to factors such as the number of images per plot, the location where the images were taken, the quality of the images and the reference measurement device. To address these challenges, Song et al. [
53] used a smartphone with a customizable fisheye lens for image acquisition and an advanced Fuzzy C-Means (FCM) algorithm for image segmentation. Their approach achieved a relative error of 1.45%, with height errors between −0.196 m and 0.195 m. Song et al. [
59] further developed these techniques with an automated approach for extracting forest inventory variables by integrating algorithms for image processing and clustering of point clouds. They achieved an absolute error of 0.05 to 0.37 m for height with an RMSE of about 0.329 and 0.007 to 0.057 m for DBH with an RMSE of about 0.022 m. These studies demonstrate the evolving methods and the considerable potential of smartphones and handheld devices in improving tree height estimation methods.
5.3. Position
Similar to the height estimates, the accuracy of the tree position also depended on factors such as the device used for the reference measurement, the path taken during inventory, and the scanning method used. For example, Fan et al. [
48] used TLS for the reference measurement and reported an RMSE of 0.09 m. In contrast, Brach et al. [
58] employed GNSS and reported a higher RMSE of 0.28 m, which is partly due to the length of the route surveyed. Similarly, Tomaštík et al. [
32] used a total station for reference measurements and found that a “sun” scan pattern achieved an RMSE of 0.20 m, while a spiral scan pattern yielded an RMSE of more than 1 m. So, although portable devices can provide accurate estimates of tree position, careful consideration of the scan pattern and the device used for the reference measurement is essential.
5.4. Basal Area, Volume, and Biomass
Smartphone applications are efficient in estimating BA, volume, and biomass and form the basis for large-scale mapping efforts. For instance, the “Relasphone” application [
61] achieved an RMSE of less than 30% and R
2 values ranging from 0.71 to 0.75 for BA measurements across various tree species in boreal forests in Finland. Similarly, when testing stem volume in a temperate forest in Mexico, the same application achieved an R
2 of about 0.87 with RMSE values ranging from 32 to 37 m
3/ha, depending on the tree species. These results were integrated with satellite imagery to map biomass on a larger scale. Comparable RMSE results were also observed with the “TRESTIMA
TM” application developed by Vastaranta et al. [
35], which reported RMSE values between 19% and 29%. An innovative approach using SfM to generate point clouds from photographs achieved an RMSE of 0.094 [
39], although this method was tested on a single plot compared to the wider environment settings tested by “Relasphone”. Nevertheless, these findings illustrate that applications and photogrammetry techniques implemented on mobile devices have the potential to reduce the cost and improve the accuracy of forest inventories.
5.5. Crown Dimensions
The ability of smartphones to measure and quantify tree crown dimensions at the single tree level is increasingly being explored, particularly through the integration of advanced sensors such as LiDAR. Canopy dimensions, including crown width, height, and overhang, are essential for assessing the growth, health, and potential risks of trees, as well as for evaluating their contribution to ecosystem services such as shading and carbon sequestration. Pace et al. [
44] made a comprehensive comparison between traditional instruments such as tree callipers and hypsometers, digital instruments such as the Field-Map system and smartphones equipped with LiDAR scanners in the measurement of urban trees. Their study has shown that, despite their compactness and ease of use, smartphones can provide accurate measurements of crown width and base height that correlate strongly with those obtained using more specialized instruments such as the Field-Map system. This was particularly evident in dense urban environments where lack of space makes the use of bulkier devices difficult. In addition, Pace et al. [
44] emphasized the time efficiency of using smartphones, which reduces the time required to collect data while maintaining accuracy. The integration of smartphone applications such as Arboreal Tree Height enabled precise measurements of crown dimensions and the collection of geo-referenced data. This makes smartphones a practical option for single tree measurements, especially for quick assessments where both accuracy and ease of use are paramount.
5.6. Tree Defect and Species Recognition
Two qualitative tree attributes analysed were tree defects and species identification. The efficacy of handheld devices in assessing these attributes depended on their counting and classification rate. The accuracy of species identification was related to the extraction of relevant features. For instance, Daliman and Ghapar [
38] employed advanced image processing techniques to automatically extract features from the leaves of four different species. They used a support vector model trained on these features and achieved an overall accuracy of 89%. In contrast, Kong et al. [
37] focused on mangrove species and developed a smartphone application that prompts the user to manually enter additional observable species features. However, Kong et al. [
37] did not quantify how accuracy was assessed in comparison. A combination of these approaches could improve species identification and reduce errors.
The ability of mobile devices to assess tree defects caused by mechanical factors, climatic conditions, animal activity, insects, and disease damage was limited. This aspect was exclusively investigated by Morgan et al. [
54], who found that although conventional methods were able to identify twice as many damaged trees as handheld LiDAR and SfM photogrammetry, the handheld devices were better able to detect damage in the lower stem parts rather than in the upper canopy.
6. Implementation Barriers
Based on the reviewed papers, the barriers to using mobile devices for tree assessment can be divided into three categories: environmental, sensor, and computational barriers. A large proportion of the environmental barriers to large-scale implementation of these technologies arise from the physical obstacles of the forest environment. Complex stand structures and extensive understory vegetation often occlude points of interest on objective tree stems (e.g., DBH) and can produce noisy point clouds, both of which contribute to end-product estimation errors. The same applies to image-based methods. Light is not the only abiotic factor that is an obstacle. Wind, rain, and fog also affect the quality of images and LiDAR point clouds. In addition, GNSS and smartphone signals are notoriously unreliable in forested areas, which has a negative impact on surveying with tools that require accurate device positioning data. Many papers captured in this review avoided many of these environmental barriers (understory occlusions, complex stands, poor lighting conditions) by being conducted in more anthropogenically altered ‘forests’ (university campuses, parks, urban areas, etc.). Although the theoretical basis of these methods has been proven under optimal, semi-controlled conditions in park-like environments, the practical implementation of these methods in operational forestry inventory forestry or old-growth forest monitoring is poorly documented, apart from a few studies in this review [
41,
43,
52]. The use of fixed distances or reference objects for the calculation of the DBH measurement or, alternatively, the arrangement of several evenly distributed camera stations around single trees would be difficult to realize in complex forest areas and would not provide any advantage over conventional measurement techniques.
In addition to environmental barriers, sensor limitations frequently contribute to the challenges of close-range remote sensing. The accuracy of an image-based end product is directly related to the image quality, which is affected by abiotic conditions: object blur due to windy or unstable image acquisition and ambient light conditions. Multi-image photogrammetric methods require a certain amount of consecutive image overlap to reliably produce accurate 3D models, and image-based point clouds often lack the depth penetration found in LiDAR-derived models. However, LiDAR sensors also have their own limitations. One methodological limitation observed with the sensors in studies is the difficulty in accurately recognizing and distinguishing trees. This problem often leads to repeated identification of the same tree due to inadequate differentiation between scans. A major limitation of the Apple LiDAR sensor is that Apple has not publicly or officially released the technical specifications of its sensors. Therefore, it is difficult to transparently compare the accuracy of different iPhone/iPad models or other LiDAR sensors because the physical sensor components are not specified. Most studies [
43,
56] agree that the range of the Apple LiDAR sensor is around 5 m, which limits the types of tree measurements that can be realized with this sensor platform.
The final barrier to implementation concerns computations to produce the results. Few of the studies can generate real-time results for single tree measurements [
46], while the majority require significant post-processing methods to generate estimates. Commercial measurement tools should provide real-time results allowing users to spot and correct errors instantly. However, smartphones and tablets might have hardware limitations that make it difficult to perform these calculations in real time. One computational barrier noted by Tatsumi et al. [
46] concerned training their artificial intelligence models with ‘best-case scenario’ trees, i.e., trees that were occluded or hidden around the DBH. The memory requirements of smartphones also pose a significant barrier, particularly when using devices equipped with LiDAR for the extraction of extensive individual tree parameters, as the processing and storage of large, real-time generated datasets can quickly overwhelm the limited memory capacity of these devices, leading to potential delays or failures in computation.
To summarize, mobile devices face major challenges when assessing trees due to environmental, sensor, and computational issues. These limitations hinder the practical application of these technologies in various forestry environments and emphasize the need for improved solutions to increase accuracy, applicability, and real-time performance.
7. Discussion and the Future
The studies analysed show significant progress in the use of mobile devices for measuring single trees. They demonstrate the potential, but also highlight some challenges and future research directions. Both passive and active sensing methods are promising for key attributes such as DBH, BA, and tree height. Passive sensor technologies integrated into smartphone cameras are well suited for qualitative assessments and species identification but have issues with consistent data quality due to device variability and environmental conditions. In contrast, active sensor technologies, such as LiDAR-equipped smartphones, provide accurate quantitative measurements but require specialized hardware, which limits accessibility.
Several gaps and challenges need to be addressed. The variability in measurement accuracy, especially for tree height and position, highlights the need for standardized protocols and benchmarking across different devices and sensors. Future research should focus primarily on the development of standardized protocols for forest inventories using mobile devices, with measurement accuracy consistently reported using percent RMSE to facilitate comparisons between different studies. The integration of passive and active sensing techniques, as highlighted by Shao et al. [
49], can improve the precision and scale of data collection, although the challenges of data fusion and calibration in different environments must be overcome. Further advances in species identification using active sensor technologies could improve detection accuracy in different forest environments.
Advances in technologies for data collection on mobile devices include both hardware and software developments. Hardware improvements in mobile devices are increasing their data collection capabilities, supported by specialized applications such as ForestScanner, Relasphone, and TRESTIMA
TM that automate real-time measurements and analyses. Non-dedicated apps and built-in mobile device sensors offer flexibility in data collection and subsequent analysis by enabling immediate recording and post-processing. Stationary methods like photography focus on detailed individual objects and require more time, while continuous methods such as LiDAR and SLAM enable rapid data acquisition over larger areas, but with limitations such as the limited range of LiDAR in iPhones and higher costs [
46,
56]. These advances contribute to improved accuracy, efficiency, and wider applicability in forest environments, suggesting potential for future integration into forestry practices such as tree and timber surveying.
Looking to the future, improving accuracy through advanced algorithms and automation remains a critical research direction. The development of robust machine learning models and automated processing techniques will be crucial in improving the precision and efficiency of tree measurements derived from mobile device data collection. These advances are crucial for the further development of mobile device-based forestry applications that promote more reliable and scalable forest management.
The reviewed studies consistently highlight high accuracy in characterizing individual tree attributes, particularly DBH, although measurements of tree height and position show greater variability influenced by factors such as image quality, quantity, processing approach, and reference measurement devices. Recent advances that achieve less than one meter accuracy in tree height measurements indicate promising progress in this area. These results emphasize the evolving technologies and methods and demonstrate the significant potential of mobile devices and handhelds in improving tree height estimation techniques. The variability in accuracy for volume, BA, and biomass of handheld devices, which typically has an RMSE of around 30%, underestimates the challenges associated with reference measurement bias, limited sample size, and variability in image quality. Research gaps remain in the identification of tree defects, especially in the upper canopy, where handheld devices have shown limitations [
35,
59,
62,
65,
66]. Tree species classification remains underexplored and is disconnected from other research areas, hence integrated systems that are able to comprehensively recognize and measure trees and identify species are required.
Benchmarking different mobile device models and sensor types is crucial to finding the most accurate and cost-effective solutions for species classification and other forestry applications. The challenges of assessing tree defects caused by mechanical damage, climatic conditions, and biological agents require robust algorithms to mitigate variability in data quality across different devices and environmental conditions. The integration of passive and active sensing techniques could improve the precision and scope of data collection, although the challenges of data fusion and calibration in different environments need to be solved. In summary, while mobile devices offer promising advances in forest surveying, limitations need to be addressed through extensive research and technological innovation to optimize their application in forest ecology and management.
8. Conclusions
The review highlights the significant advances and challenges in the use of mobile devices for single tree measurements in forestry. Equipped with high-quality RGB cameras, depth sensors, and LiDAR scanners, smartphones are becoming practical tools for close-range photogrammetry and remote sensing. Mobile devices have been effectively used to measure attributes such as DBH, tree height, BA, volume, and tree position. They utilize both passive and active sensing techniques and thus have the potential to improve the accuracy and efficiency of forest inventories. Tree attributes can be estimated either by indirect measurements through post-processing of datasets or by direct methods using apps for mobile devices. Methodological consistency is essential for the replication of research results and practical application in forestry. The data processing methods used in the reviewed papers are either image-based or point cloud-based. Image-based methods use automatic recognition algorithms or deep learning, while point cloud methods include noise removal and ground filtering. Both methods are promising for accurate tree measurements, with automation and deep learning constantly improving. Smartphones or tablets have been used in various forest ecosystems, including managed forests and urban forests. Measurement accuracy for tree height and DBH varies due to factors such as reference measurements and processing methods, but advances in development show high potential for accuracy. Barriers to implementation include environmental factors such as complex stand structures and sensor limitations such as image quality and LiDAR range. There are also computational obstacles, as many studies require extensive post-processing, which limits real-time measurement capabilities. Overcoming these challenges through standardized protocols, improved algorithms, and machine learning is critical. The integration of passive and active sensing techniques as well as advances in species identification and defect detection will improve the quality of data collection. Promoting mobile devices in citizen science initiatives can expand data coverage and improve forest management.
According to the reviewed studies, mobile devices show great potential for improvements in forest surveying. However, in this review, we have not addressed the operational implementation of the solutions in forestry practice, which poses further challenges. At least some of them are worth mentioning, including maintenance and updating of algorithms and devices, limited time for conducting field inventories—high dependence on weather conditions, technological problems related to the use of the devices in difficult field conditions, the need to transfer know-how to contractors or the constant development of the technology. Continuous research and technological innovation are therefore essential to fully utilize the potential of mobile device-based technology in forest ecology and management.
Author Contributions
Conceptualization, K.S. and R.M.; methodology, K.S. and R.M.; formal analysis, R.M., M.K., T.A.G., E.T., M.M. and Y.E.; writing—original draft preparation, R.M., M.K., T.A.G., E.T., M.M. and Y.E.; writing—review and editing, K.S. and Y.E.; supervision, K.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was internally funded by IDEAS NCBR Sp. z o.o., Poland.
Data Availability Statement
The database of reviewed papers is available on request from the corresponding author.
Acknowledgments
We would like to thank the 3DForEcoTech Cost Action Core Group for the inspiration to write this review. We sincerely appreciate the four anonymous reviewers and the editor for their valuable feedback, which has significantly enhanced the quality of this manuscript.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Laar, A.V.; Akça, A. Forest Mensuration; Springer: Dordrecht, The Netherlands, 2007; Volume 13. [Google Scholar] [CrossRef]
- West, P.W. Tree and Forest Measurement; Springer Berlin Heidelberg: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Kershaw, J.A.; Ducey, M.J.; Beers, T.W.; Husch, B. Forest Mensuration; Wiley: Hoboken, NJ, USA, 2016. [Google Scholar] [CrossRef]
- McElhinny, C.; Gibbons, P.; Brack, C.; Bauhus, J. Forest and Woodland Stand Structural Complexity: Its Definition and Measurement. For. Ecol. Manag. 2005, 218, 1–24. [Google Scholar] [CrossRef]
- Burkhart, H.E.; Tomé, M. Modeling Forest Trees and Stands; Springer Netherlands: Dordrecht, The Netherlands, 2012. [Google Scholar] [CrossRef]
- Kangas, A.; Maltamo, M. (Eds.) Forest Inventory; Springer: Dordrecht, The Netherlands, 2006; Volume 10. [Google Scholar] [CrossRef]
- Scott, C.T.; Gove, J.H. Forest Inventory. In Wiley StatsRef: Statistics Reference Online; Wiley: Hoboken, NJ, USA, 2014. [Google Scholar] [CrossRef]
- Nogueira, E.M.; Fearnside, P.M.; Nelson, B.W.; Barbosa, R.I.; Keizer, E.W.H. Estimates of Forest Biomass in the Brazilian Amazon: New Allometric Equations and Adjustments to Biomass from Wood-Volume Inventories. For. Ecol. Manag. 2008, 256, 1853–1867. [Google Scholar] [CrossRef]
- Foley, J.A.; DeFries, R.; Asner, G.P.; Barford, C.; Bonan, G.; Carpenter, S.R.; Chapin, F.S.; Coe, M.T.; Daily, G.C.; Gibbs, H.K.; et al. Global Consequences of Land Use. Science 2005, 309, 570–574. [Google Scholar] [CrossRef]
- Domke, G.M.; Woodall, C.W.; Walters, B.F.; Smith, J.E. From Models to Measurements: Comparing Downed Dead Wood Carbon Stock Estimates in the U.S. Forest Inventory. PLoS ONE 2013, 8, e59949. [Google Scholar] [CrossRef] [PubMed]
- Moskalik, T.; Tymendorf, Ł.; van der Saar, J.; Trzciński, G. Methods of Wood Volume Determining and Its Implications for Forest Transport. Sensors 2022, 22, 6028. [Google Scholar] [CrossRef] [PubMed]
- Cardelús, C.L.; Chazdon, R.L. Inner–crown Microenvironments of Two Emergent Tree Species in a Lowland Wet Forest. Biotropica 2005, 37, 238–244. [Google Scholar] [CrossRef]
- Zhu, Z.; Kleinn, C.; Nölke, N. Assessing Tree Crown Volume—A Review. For. Int. J. For. Res. 2021, 94, 18–35. [Google Scholar] [CrossRef]
- Larjavaara, M.; Muller-Landau, H.C. Measuring Tree Height: A Quantitative Comparison of Two Common Field Methods in a Moist Tropical Forest. Methods Ecol. Evol. 2013, 4, 793–801. [Google Scholar] [CrossRef]
- Stereńczak, K.; Mielcarek, M.; Modzelewska, A.; Kraszewski, B.; Fassnacht, F.E.; Hilszczański, J. Intra-Annual Ips Typographus Outbreak Monitoring Using a Multi-Temporal GIS Analysis Based on Hyperspectral and ALS Data in the Białowieża Forests. For. Ecol. Manag. 2019, 442, 105–116. [Google Scholar] [CrossRef]
- Wang, Y.; Pyörälä, J.; Liang, X.; Lehtomäki, M.; Kukko, A.; Yu, X.; Kaartinen, H.; Hyyppä, J. In Situ Biomass Estimation at Tree and Plot Levels: What Did Data Record and What Did Algorithms Derive from Terrestrial and Aerial Point Clouds in Boreal Forest. Remote Sens. Environ. 2019, 232, 111309. [Google Scholar] [CrossRef]
- Korhonen, L.; Korhonen, K.; Rautiainen, M.; Stenberg, P. Estimation of Forest Canopy Cover: A Comparison of Field Measurement Techniques. Silva Fenn. 2006, 40, 577–588. [Google Scholar] [CrossRef]
- Cazzolla Gatti, R.; Reich, P.B.; Gamarra, J.G.P.; Crowther, T.; Hui, C.; Morera, A.; Bastin, J.-F.; de-Miguel, S.; Nabuurs, G.-J.; Svenning, J.-C.; et al. The Number of Tree Species on Earth. Proc. Natl. Acad. Sci. USA 2022, 119, e2115329119. [Google Scholar] [CrossRef] [PubMed]
- Bronisz, K.; Zasada, M. Correction: Bronisz K. and Zasada M., Comparison of Fixed- and Mixed-Effects Approaches to Taper Modeling for Scots Pine in West Poland. Forests 2019, 10, 975. Forests 2020, 11, 437. [Google Scholar] [CrossRef]
- Garber, S.M.; Maguire, D.A. Modeling Stem Taper of Three Central Oregon Species Using Nonlinear Mixed Effects Models and Autoregressive Error Structures. For. Ecol. Manag. 2003, 179, 507–522. [Google Scholar] [CrossRef]
- Roxburgh, S.H.; Paul, K.I.; Clifford, D.; England, J.R.; Raison, R.J. Guidelines for Constructing Allometric Models for the Prediction of Woody Biomass: How Many Individuals to Harvest? Ecosphere 2015, 6, 1–27. [Google Scholar] [CrossRef]
- Mcroberts, R.; Tomppo, E. Remote Sensing Support for National Forest Inventories. Remote Sens. Environ. 2007, 110, 412–419. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; White, J.C.; Wulder, M.A.; Næsset, E. Remote Sensing in Forestry: Current Challenges, Considerations and Directions. For. Int. J. For. Res. 2024, 97, 11–37. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; White, J.C. Digital Aerial Photogrammetry for Updating Area-Based Forest Inventories: A Review of Opportunities, Challenges, and Future Directions. Curr. For. Rep. 2019, 5, 55–75. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Liang, X.; Kukko, A.; Balenović, I.; Saarinen, N.; Junttila, S.; Kankare, V.; Holopainen, M.; Mokroš, M.; Surový, P.; Kaartinen, H.; et al. Close-Range Remote Sensing of Forests: The state of the art, challenges, and opportunities for systems and data acquisitions. IEEE Geosci. Remote Sens. 2022, 10, 32–71. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International Benchmarking of Terrestrial Laser Scanning Approaches for Forest Inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Krok, G.; Kraszewski, B.; Stereńczak, K. Application of Terrestrial Laser Scanning in Forest Inventory—An Overview of Selected Issues. For. Res. Pap. 2020, 81, 175–194. [Google Scholar] [CrossRef]
- Gonzalez de Tanago, J.; Lau, A.; Bartholomeus, H.; Herold, M.; Avitabile, V.; Raumonen, P.; Martius, C.; Goodman, R.C.; Disney, M.; Manuri, S.; et al. Estimation of Above—Ground Biomass of Large Tropical Trees with Terrestrial LiDAR. Methods Ecol. Evol. 2018, 9, 223–234. [Google Scholar] [CrossRef]
- Saarinen, N.; Kankare, V.; Yrttimaa, T.; Viljanen, N.; Honkavaara, E.; Holopainen, M.; Hyyppä, J.; Huuskonen, S.; Hynynen, J.; Vastaranta, M. Assessing the Effects of Thinning on Stem Growth Allocation of Individual Scots Pine Trees. For. Ecol. Manag. 2020, 474, 118344. [Google Scholar] [CrossRef]
- Hyyppä, J.; Virtanen, J.P.; Jaakkola, A.; Yu, X.; Hyyppä, H.; Liang, X. Feasibility of Google Tango and Kinect for Crowdsourcing Forestry Information. Forests 2017, 9, 6. [Google Scholar] [CrossRef]
- Tomaštík, J.; Saloň, Š.; Tunák, D.; Chudý, F.; Kardoš, M. Tango in Forests—An Initial Experience of the Use of the New Google Technology in Connection with Forest Inventory Tasks. Comput. Electron. Agric. 2017, 141, 109–117. [Google Scholar] [CrossRef]
- Putra, B.T.W.; Ramadhani, N.J.; Soedibyo, D.W.; Marhaenanto, B.; Indarto, I.; Yualianto, Y. The Use of Computer Vision to Estimate Tree Diameter and Circumference in Homogeneous and Production Forests Using a Non-Contact Method. Forest Sci. Technol. 2021, 17, 32–38. [Google Scholar] [CrossRef]
- Wu, X.; Zhou, S.; Xu, A.; Chen, B. Passive Measurement Method of Tree Diameter at Breast Height Using a Smartphone. Comput. Electron. Agric. 2019, 163, 104875. [Google Scholar] [CrossRef]
- Vastaranta, M.; Latorre, E.G.; Luoma, V.; Saarinen, N.; Holopainen, M.; Hyyppä, J. Evaluation of a Smartphone App for Forest Sample Plot Measurements. Forests 2015, 6, 1179–1194. [Google Scholar] [CrossRef]
- Xuan, J.; Li, X.; Du, H.; Zhou, G.; Mao, F.; Wang, J.; Zhang, B.; Gong, Y.; Zhu, D.; Zhou, L.; et al. Intelligent Estimating the Tree Height in Urban Forests Based on Deep Learning Combined with a Smartphone and a Comparison with UAV-LiDAR. Remote Sens. 2023, 15, 97. [Google Scholar] [CrossRef]
- Kong, F.K.M.A.; Osman, M.A.; Zainon, W.M.N.W.; Talib, A.Z. Multi-Layer Mangrove Species Identification. In Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2019; Volume 880, pp. 849–855. [Google Scholar] [CrossRef]
- Daliman, S.; Abdul Ghapar, N. Classification of Artocarpus Species Based on Leaf Recognition Using Multiclass Support Vector Machine. IOP Conf. Ser. Earth Environ. Sci. 2021, 842, 012073. [Google Scholar] [CrossRef]
- Marzulli, M.I.; Raumonen, P.; Greco, R.; Persia, M.; Tartarino, P. Estimating Tree Stem Diameters and Volume from Smartphone Photogrammetric Point Clouds. Forestry 2020, 93, 411–429. [Google Scholar] [CrossRef]
- Shen, Y.; Huang, R.; Hua, B.; Pan, Y.; Mei, Y.; Dong, M. Automatic Tree Height Measurement Based on Three-Dimensional Reconstruction Using Smartphone. Sensors 2023, 23, 7248. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y.; Feng, Z.; Mannan, A.; Khan, T.U.; Shen, C.; Saeed, S. Estimating Tree Position, Diameter at Breast Height, and Tree Height in Real-Time Using a Mobile Phone with RGB-D SLAM. Remote Sens. 2018, 10, 1845. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, Z.; Shen, C.; Khan, T.U.; Mannan, A.; Gao, X.; Chen, P.; Saeed, S. A Trunk-Based SLAM Backend for Smartphones with Online SLAM in Large-Scale Forest Inventories. ISPRS J. Photogramm. Remote Sens. 2020, 162, 41–49. [Google Scholar] [CrossRef]
- Çakir, G.Y.; Post, C.J.; Mikhailova, E.A.; Schlautman, M.A. 3D LiDAR Scanning of Urban Forest Structure Using a Consumer Tablet. Urban. Sci. 2021, 5, 88. [Google Scholar] [CrossRef]
- Pace, R.; Masini, E.; Giuliarelli, D.; Biagiola, L.; Tomao, A.; Guidolotti, G.; Agrimi, M.; Portoghesi, L.; De Angelis, P.; Calfapietra, C. Tree Measurements in the Urban Environment: Insights from Traditional and Digital Field Instruments to Smartphone Applications. Arboric. Urban. For. 2022, 48, 113–123. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Kraßnitzer, R.; Tockner, A.; Nothdurft, A. Measurement of Forest Inventory Parameters with Apple Ipad pro and Integrated Lidar Technology. Remote Sens. 2021, 13, 3129. [Google Scholar] [CrossRef]
- Tatsumi, S.; Yamaguchi, K.; Furuya, N. ForestScanner: A Mobile Application for Measuring and Mapping Trees with LiDAR-Equipped IPhone and IPad. Methods Ecol. Evol. 2023, 14, 1603–1609. [Google Scholar] [CrossRef]
- Bobrowski, R.; Winczek, M.; Zięba-Kulawik, K.; Wężyk, P. Best Practices to Use the IPad Pro LiDAR for Some Procedures of Data Acquisition in the Urban Forest. Urban. For. Urban. Green. 2023, 79, 127815. [Google Scholar] [CrossRef]
- Fan, G.; Dong, Y.; Chen, D.; Chen, F. New Method for Forest Resource Data Collection Based on Smartphone Fusion with Multiple Sensors. Mob. Inf. Syst. 2020, 2020, 5736978. [Google Scholar] [CrossRef]
- Shao, T.; Qu, Y.; Du, J. A Low-Cost Integrated Sensor for Measuring Tree Diameter at Breast Height (DBH). Comput. Electron. Agric. 2022, 199, 107140. [Google Scholar] [CrossRef]
- Kędra, K.; Barbeito, I. Estimation of Individual Norway Spruce Crown Metrics Using a Smartphone Device. PFG—J. Photogramm. Remote Sens. Geoinf. Sci. 2022, 90, 123–134. [Google Scholar] [CrossRef]
- Holcomb, A.; Tong, L.; Keshav, S. Robust Single-Image Tree Diameter Estimation with Mobile Phones. Remote Sens. 2023, 15, 772. [Google Scholar] [CrossRef]
- Celes, C.H.S.; de Araujo, R.F.; Emmert, F.; Lima, A.J.N.; Campos, M.A.A. Digital Approach for Measuring Tree Diameters in the Amazon Forest. Floresta E Ambiente 2019, 26, e20160384. [Google Scholar] [CrossRef]
- Song, J.; Zhao, Y.; Chi, Z.; Ma, Q.; Yin, T.; Zhang, X. Improved FCM Algorithm for Fisheye Image Cluster Analysis for Tree Height Calculation. Math. Biosci. Eng. 2021, 18, 7806–7836. [Google Scholar] [CrossRef]
- Morgan, C.J.; Powers, M.; Strimbu, B.M. Estimating Tree Defects with Point Clouds Developed from Active and Passive Sensors. Remote Sens. 2022, 14, 1938. [Google Scholar] [CrossRef]
- Wang, X.; Singh, A.; Pervysheva, Y.; Lamatungga, K.E.; Murtinová, V.; Mukarram, M.; Zhu, Q.; Song, K.; Surový, P.; Mokroš, M. Evaluation of ipad pro 2020 lidar for estimating tree diameters in urban forest. In ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences; Copernicus GmbH: Antalya, Turkey, 2021; Volume 8, pp. 105–110. [Google Scholar] [CrossRef]
- Mokroš, M.; Mikita, T.; Singh, A.; Tomaštík, J.; Chudá, J.; Wężyk, P.; Kuželka, K.; Surový, P.; Klimánek, M.; Zięba-Kulawik, K.; et al. Novel Low-Cost Mobile Mapping Systems for Forest Inventories as Terrestrial Laser Scanning Alternatives. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102512. [Google Scholar] [CrossRef]
- Chioni, C.; Maragno, A.; Pianegonda, A.; Ciolli, M.; Favargiotti, S.; Massari, G.A. Low-Cost 3D Virtual and Dynamic Reconstruction Approach for Urban Forests: The Mesiano University Park. Sustainability 2023, 15, 14072. [Google Scholar] [CrossRef]
- Brach, M.; Tracz, W.; Krok, G.; Gąsior, J. Feasibility of Low-Cost LiDAR Scanner Implementation in Forest Sampling Techniques. Forests 2023, 14, 706. [Google Scholar] [CrossRef]
- Song, J.; Huang, Q.; Zhao, Y.; Song, W.; Fan, Y.; Lu, C. Automatic Extraction of Forest Inventory Variables at the Tree Level by Using Smartphone Images to Construct a Three-Dimensional Model. Forests 2023, 14, 1081. [Google Scholar] [CrossRef]
- Gülci, S.; Yurtseven, H.; Akay, A.O.; Akgul, M. Measuring Tree Diameter Using a LiDAR-Equipped Smartphone: A Comparison of Smartphone- and Caliper-Based DBH. Environ. Monit. Assess. 2023, 195, 678. [Google Scholar] [CrossRef] [PubMed]
- Molinier, M.; López-Sánchez, C.A.; Toivanen, T.; Korpela, I.; Corral-Rivas, J.J.; Tergujeff, R.; Häme, T. Relasphone-Mobile and Participative in Situ Forest Biomass Measurements Supporting Satellite Image Mapping. Remote Sens. 2016, 8, 869. [Google Scholar] [CrossRef]
- Ahamed, A.; Foye, J.; Poudel, S.; Trieschman, E.; Fike, J. Measuring Tree Diameter with Photogrammetry Using Mobile Phone Cameras. Forests 2023, 14, 2027. [Google Scholar] [CrossRef]
- Woo, H.; Kim, I.; Choi, B. Computer Vision Techniques in Forest Inventory Assessment: Improving Accuracy of Tree Diameter Measurement Using Smartphone Camera and Photogrammetry. Sens. Mater. 2021, 33, 3835–3845. [Google Scholar] [CrossRef]
- Mokroš, M.; Koreň, M. Dendrocloud: Free Terrestrial-Based Point Cloud Processing Software for Forestry; Czech University of Life Sciences Prague (Czech Republic): Praha-Suchdol, Czech Republic, 2019. [Google Scholar]
- Bobrowski, R.; Winczek, M.; Silva, L.P.; Cuchi, T.; Szostak, M.; Wężyk, P. Promising Uses of the iPad Pro Point Clouds: The Case of the Trunk Flare Diameter Estimation in the Urban Forest. Remote Sens. 2022, 14, 4661. [Google Scholar] [CrossRef]
- McGlade, J.; Wallace, L.; Reinke, K.; Jones, S. The Potential of Low-Cost 3D Imaging Technologies for Forestry Applications: Setting a Research Agenda for Low-Cost Remote Sensing Inventory Tasks. Forests 2022, 13, 204. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}