
Remote Sensing for Restoration Change Monitoring in Tropical Peat Swamp Forests in Malaysia



Abstract
1. Introduction
2. Materials and Methods
2.1. Study Site
2.2. Workflow
2.3. Sentinel-2 Data and Preprocessing
2.4. Sentinel-2 Model Input Variables
2.5. Training and Validation Data
2.5.1. ‘LiDAR AGB Model’
2.5.2. Field Inventory Data
2.6. Random Forest Regression
2.7. Wall-to-Wall AGB for NSPSF
2.8. 2018 AGB Validation
2.9. AGB Change Analysis
- Dates and locations of drain-blocking activities;
- Dates and locations of replanting programmes;
- Dates and locations of large-scale fire events;
- Locations of human hydrological interventions, e.g., clay bunds/dyke installations;
- Recent changes in land adjacent to NSPSF, e.g., road upgrades.
3. Results
3.1. Random Forest Model Performance
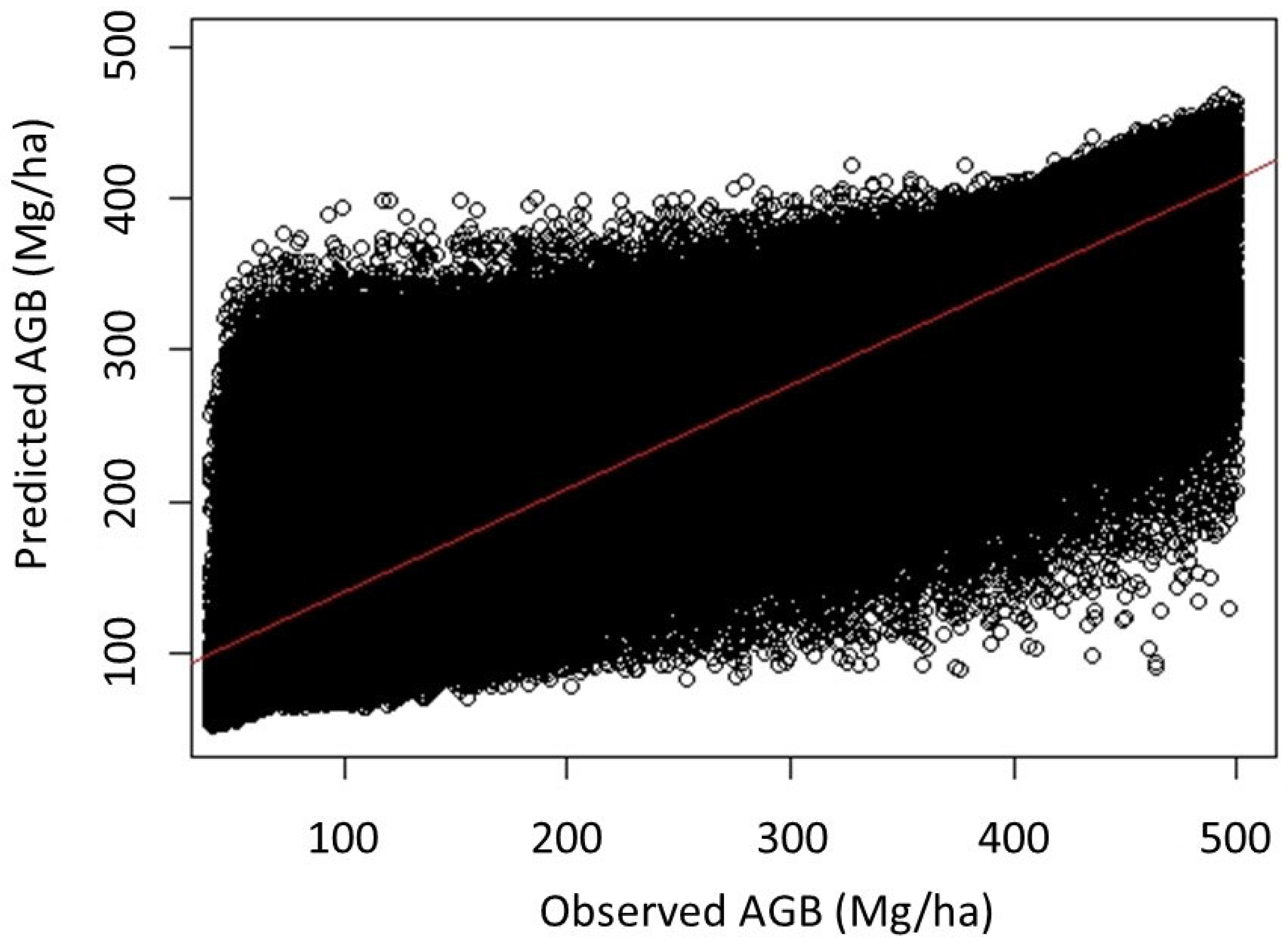
3.2. Predictive Performance of the Random Forest Model
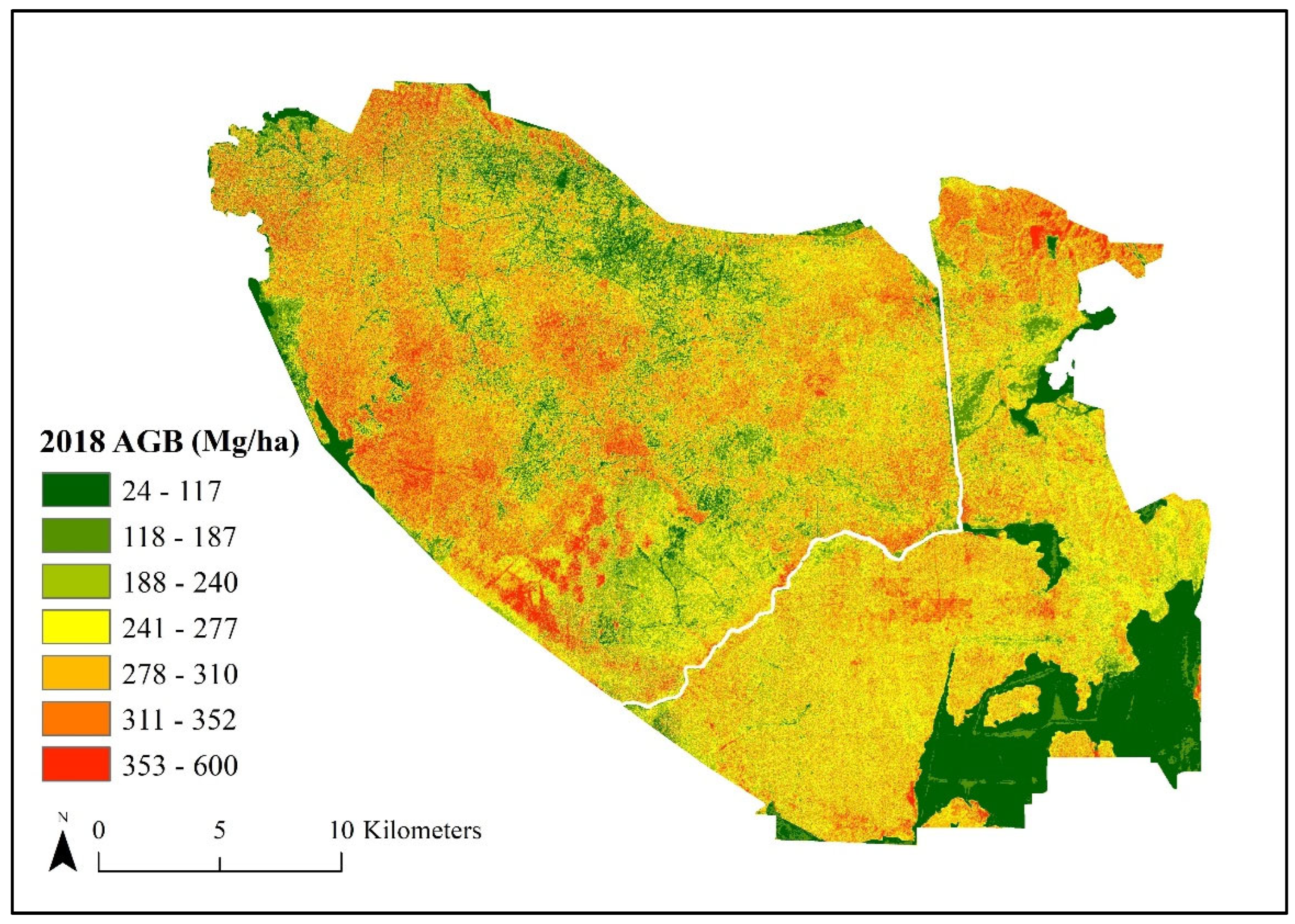
3.3. Wall-to-Wall AGB Maps
3.4. 2018 AGB Independent Validation
3.5. Change Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Evers, S.; Yule, C.M.; Padfield, R.; O’Reilly, P.; Varkkey, H. Keep wetlands wet: The myth of sustainable development of tropical peatlands–implications for policies and management. Glob. Chang. Biol. 2017, 23, 534–549. [Google Scholar] [CrossRef] [PubMed]
- Page, S.E.; Hooijer, A. In the line of fire: The peatlands of Southeast Asia. Philos. Trans. R. Soc. B Biol. Sci. 2016, 371, 20150176. [Google Scholar] [CrossRef]
- Miettinen, J.; Shi, C.; Liew, S.C. Two decades of destruction in Southeast Asia’s peat swamp forests. Front. Ecol. Environ. 2012, 10, 124–128. [Google Scholar] [CrossRef]
- Murdiyarso, D.; Lilleskov, E.; Kolka, R. Tropical peatlands under siege: The need for evidence-based policies and strategies. Mitig. Adapt. Strateg. Glob. Chang. 2019, 24, 493–505. [Google Scholar] [CrossRef]
- Wijedasa, L.S.; Jauhiainen, J.; Könönen, M.; Lampela, M.; Vasander, H.; Leblanc, M.C.; Evers, S.; Smith, T.E.L.; Yule, C.M.; Varkkey, H.; et al. Denial of long-term issues with agriculture on tropical peatlands will have devastating consequences. Glob. Chang. Biol. 2017, 23, 977–982. [Google Scholar] [CrossRef]
- Padfield, R.; Waldron, S.; Drew, S.; Papargyropoulou, E.; Kumaran, S.; Page, S.; Gilvear, D.; Armstrong, A.; Evers, S.; Williams, P.; et al. Research agendas for the sustainable management of tropical peatland in Malaysia. Environ. Conserv. 2015, 42, 73–83. [Google Scholar] [CrossRef]
- Hiraishi, T.; Krug, T.; Tanabe, K.; Srivastava, N.; Baasansuren, J.; Fukuda, M.; Troxler, T.G. 2013 Supplement to the 2006 IPCC Guidelines for National Greenhouse Gas Inventories: Wetlands; IPCC: Geneva, Switzerland, 2014. [Google Scholar]
- Asner, G.P.; Brodrick, P.G.; Philipson, C.; Vaughn, N.R.; Martin, R.E.; Knapp, D.E.; Heckler, J.; Evans, L.J.; Jucker, T.; Goossens, B.; et al. Mapped aboveground carbon stocks to advance forest conservation and recovery in Malaysian Borneo. Biol. Conserv. 2018, 217, 289–310. [Google Scholar] [CrossRef]
- Brown, C.; Boyd, D.S.; Sjögersten, S.; Clewley, D.; Evers, S.L.; Aplin, P. Tropical peatland vegetation structure and biomass: Optimal exploitation of airborne laser scanning. Remote Sens. 2018, 10, 671. [Google Scholar] [CrossRef]
- Saragi-Sasmito, M.F.; Murdiyarso, D.; June, T.; Sasmito, S.D. Carbon stocks, emissions, and aboveground productivity in restored secondary tropical peat swamp forests. Mitig. Adapt. Strateg. Glob. Chang. 2019, 24, 521–533. [Google Scholar] [CrossRef]
- Vijayanathan, J.; Ishak, M.; Parlan, I.; Omar, H.; Haruna, A.O.; Lion, M.; Hassan, M.; Jong, R.; Samah, A. Temporal patterns control carbon balance in forest and agricultural tropical peatlands in North Selangor, Malaysia. iForest-Biogeosciences For. 2021, 14, 362. [Google Scholar] [CrossRef]
- Pan, Y.; Birdsey, R.A.; Fang, J.; Houghton, R.; Kauppi, P.E.; Kurz, W.A.; Phillips, O.L.; Shvidenko, A.; Lewis, S.L.; Canadell, J.G.; et al. A large and persistent carbon sink in the world’s forests. Science 2011, 333, 988–993. [Google Scholar] [CrossRef] [PubMed]
- Lu, D. The potential and challenge of remote sensing-based biomass estimation. Int. J. Remote Sens. 2006, 27, 1297–1328. [Google Scholar] [CrossRef]
- Asner, G.P.; Mascaro, J.; Muller-Landau, H.C.; Vieilledent, G.; Vaudry, R.; Rasamoelina, M.; Hall, J.S.; van Breugel, M. A universal airborne LiDAR approach for tropical forest carbon mapping. Oecologia 2012, 168, 1147–1160. [Google Scholar] [CrossRef]
- European Space Agency. BIOMASS Report for Mission Selection May 2012; Report No.: SP-1324/1; European Space Agency: Paris, France, 2012. [Google Scholar]
- Corona, P. Consolidating new paradigms in large-scale monitoring and assessment of forest ecosystems. Environ. Res. 2016, 144, 8–14. [Google Scholar] [CrossRef]
- Verkerk, P.J.; Mavsar, R.; Giergiczny, M.; Lindner, M.; Edwards, D.; Schelhaas, M.J. Assessing impacts of intensified biomass production and biodiversity protection on ecosystem services provided by European forests. Ecosyst. Serv. 2014, 9, 155–165. [Google Scholar] [CrossRef]
- Gibbs, H.K.; Brown, S.; Niles, J.O.; Foley, J.A. Monitoring and estimating tropical forest carbon stocks: Making REDD a reality. Environ. Res. Lett. 2007, 2, 045023. [Google Scholar] [CrossRef]
- Huang, S.; Ramirez, C.; McElhaney, M.; Evans, K. F3: Simulating spatiotemporal forest change from field inventory, remote sensing, growth modeling, and management actions. For. Ecol. Manag. 2018, 415, 26–37. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote sensing technologies for enhancing forest inventories: A review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Pandit, S.; Tsuyuki, S.; Dube, T. Estimating above-ground biomass in sub-tropical buffer zone community forests, Nepal, using Sentinel 2 data. Remote Sens. 2018, 10, 601. [Google Scholar] [CrossRef]
- Majasalmi, T.; Rautiainen, M. The potential of Sentinel-2 data for estimating biophysical variables in a boreal forest: A simulation study. Remote Sens. Lett. 2016, 7, 427–436. [Google Scholar] [CrossRef]
- Lu, M.; Hamunyela, E.; Verbesselt, J.; Pebesma, E. Dimension reduction of multi-spectral satellite image time series to improve deforestation monitoring. Remote Sens. 2017, 9, 1025. [Google Scholar] [CrossRef]
- Waqar, M.M.; Sukmawati, R.; Ji, Y.; Sri Sumantyo, J.T. Tropical PeatLand forest biomass estimation using polarimetric parameters extracted from RadarSAT-2 images. Land 2020, 9, 193. [Google Scholar] [CrossRef]
- Berninger, A.; Siegert, F. The potential of ICESat-2 to identify carbon-rich peatlands in Indonesia. Remote Sens. 2020, 12, 4175. [Google Scholar] [CrossRef]
- Urbazaev, M.; Thiel, C.; Cremer, F.; Schmullius, C. Assessment of the mapping of aboveground biomass and its uncertainties using field measurements, airborne lidar and satellite data in Mexico. In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 8793–8796. [Google Scholar]
- Coomes, D.A.; Dalponte, M.; Jucker, T.; Asner, G.P.; Banin, L.F.; Burslem, D.F.; Lewis, S.L.; Nilus, R.; Phillips, O.L.; Phua, M.-H.; et al. Area-based vs tree-centric approaches to mapping forest carbon in Southeast Asian forests from airborne laser scanning data. Remote Sens. Environ. 2017, 194, 77–88. [Google Scholar] [CrossRef]
- Ni-Meister, W.; Lee, S. Allometric Relationship between Full Waveform LiDAR measurements and Above-ground Biomass. In AGU Fall Meeting Abstracts; ADS: Cambridge, MA, USA, 2016; Volume 2016, p. B44C-07. [Google Scholar]
- Thapa, R.B.; Watanabe, M.; Motohka, T.; Shiraishi, T.; Shimada, M. Calibration of aboveground forest carbon stock models for major tropical forests in central Sumatra using airborne LiDAR and field measurement data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 8, 661–673. [Google Scholar] [CrossRef]
- Zhao, K.; Popescu, S.; Nelson, R. Lidar remote sensing of forest biomass: A scale-invariant estimation approach using airborne lasers. Remote Sens. Environ. 2009, 113, 182–196. [Google Scholar] [CrossRef]
- Næsset, E.; Gobakken, T. Estimation of above-and below-ground biomass across regions of the boreal forest zone using airborne laser. Remote Sens. Environ. 2008, 112, 3079–3090. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Hartig, F.; Latifi, H.; Berger, C.; Hernández, J.; Corvalán, P.; Koch, B. Importance of sample size, data type and prediction method for remote sensing-based estimations of aboveground forest biomass. Remote Sens. Environ. 2014, 154, 102–114. [Google Scholar] [CrossRef]
- Mitchard, E.T.; Saatchi, S.S.; White, L.J.; Abernethy, K.A.; Jeffery, K.J.; Lewis, S.L.; Collins, M.; Lefsky, M.A.; Leal, M.E.; Woodhouse, I.H.; et al. Mapping tropical forest biomass with radar and spaceborne LiDAR in Lopé National Park, Gabon: Overcoming problems of high biomass and persistent cloud. Biogeosciences 2012, 9, 179–191. [Google Scholar] [CrossRef]
- Boudreau, J.; Nelson, R.F.; Margolis, H.A.; Beaudoin, A.; Guindon, L.; Kimes, D.S. Regional aboveground forest biomass using airborne and spaceborne LiDAR in Québec. Remote Sens. Environ. 2008, 112, 3876–3890. [Google Scholar] [CrossRef]
- García, M.; Saatchi, S.; Ustin, S.; Balzter, H. Modelling forest canopy height by integrating airborne LiDAR samples with satellite Radar and multispectral imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 66, 159–173. [Google Scholar] [CrossRef]
- Bolton, D.K.; White, J.C.; Wulder, M.A.; Coops, N.C.; Hermosilla, T.; Yuan, X. Updating stand-level forest inventories using airborne laser scanning and Landsat time series data. Int. J. Appl. Earth Obs. Geoinf. 2018, 66, 174–183. [Google Scholar] [CrossRef]
- Jin, S.; Su, Y.; Gao, S.; Hu, T.; Liu, J.; Guo, Q. The transferability of Random Forest in canopy height estimation from multi-source remote sensing data. Remote Sens. 2018, 10, 1183. [Google Scholar] [CrossRef]
- Zald, H.S.; Wulder, M.A.; White, J.C.; Hilker, T.; Hermosilla, T.; Hobart, G.W.; Coops, N.C. Integrating Landsat pixel composites and change metrics with lidar plots to predictively map forest structure and aboveground biomass in Saskatchewan, Canada. Remote Sens. Environ. 2016, 176, 188–201. [Google Scholar] [CrossRef]
- Ferraz, A.; Saatchi, S.; Xu, L.; Hagen, S.; Chave, J.; Yu, Y.; Meyer, V.; Garcia, M.; Silva, C.; Roswintiart, O.; et al. Carbon storage potential in degraded forests of Kalimantan, Indonesia. Environ. Res. Lett. 2018, 13, 095001. [Google Scholar] [CrossRef]
- Shao, Z.; Zhang, L.; Wang, L. Stacked sparse autoencoder modeling using the synergy of airborne LiDAR and satellite optical and SAR data to map forest above-ground biomass. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5569–5582. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Bater, C.W.; Coops, N.C.; Hopkinson, C.; Chen, G. Lidar plots—A new large-area data collection option: Context, concepts, and case study. Can. J. Remote Sens. 2012, 38, 600–618. [Google Scholar] [CrossRef]
- Selangor State Forestry Department. Integrated Management Plan for North Selangor Peat Swamp Forest 2014–2023; Selangor State Forestry Department: Shah Alam, Malaysia, 2014. [Google Scholar]
- Ahmed, N. Guardians of the North Selangor Peat Swamp Forest; Peatlands International: Québec, QC, Canada, 2014. [Google Scholar]
- Tonks, A.J.; Aplin, P.; Beriro, D.J.; Cooper, H.; Evers, S.; Vane, C.H.; Sjögersten, S. Impacts of conversion of tropical peat swamp forest to oil palm plantation on peat organic chemistry, physical properties and carbon stocks. Geoderma 2017, 289, 36–45. [Google Scholar] [CrossRef]
- Azhar, B.; Lindenmayer, D.B.; Wood, J.; Fischer, J.; Manning, A.; McElhinny, C.; Zakaria, M. The conservation value of oil palm plantation estates, smallholdings and logged peat swamp forest for birds. For. Ecol. Manag. 2011, 262, 2306–2315. [Google Scholar] [CrossRef]
- Yule, C.M. Loss of biodiversity and ecosystem functioning in Indo-Malayan peat swamp forests. Biodivers. Conserv. 2010, 19, 393–409. [Google Scholar] [CrossRef]
- Prentice, C.; Aikanathan, S. A Preliminary Faunal Assessment of the North Selangor Peat Swamp Forest; Asian Wetland Bureau: Kuala Lumpur, Malaysia, 1989. [Google Scholar]
- Charters, L.J.; Aplin, P.; Marston, C.G.; Padfield, R.; Rengasamy, N.; Bin Dahalan, M.P.; Evers, S. Peat swamp forest conservation withstands pervasive land conversion to oil palm plantation in North Selangor, Malaysia. Int. J. Remote Sens. 2019, 40, 7409–7438. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Galidaki, G.; Zianis, D.; Gitas, I.; Radoglou, K.; Karathanassi, V.; Tsakiri–Strati, M.; Woodhouse, I.; Mallinis, G. Vegetation biomass estimation with remote sensing: Focus on forest and other wooded land over the Mediterranean ecosystem. Int. J. Remote Sens. 2017, 38, 1940–1966. [Google Scholar] [CrossRef]
- Timothy, D.; Onisimo, M.; Riyad, I. Quantifying aboveground biomass in African environments: A review of the trade-offs between sensor estimation accuracy and costs. Trop. Ecol. 2016, 57, 393–405. [Google Scholar]
- Fernández-Manso, A.; Fernández-Manso, O.; Quintano, C. SENTINEL-2A red-edge spectral indices suitability for discriminating burn severity. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 170–175. [Google Scholar] [CrossRef]
- Frampton, W.J.; Dash, J.; Watmough, G.; Milton, E.J. Evaluating the capabilities of Sentinel-2 for quantitative estimation of biophysical variables in vegetation. ISPRS J. Photogramm. Remote Sens. 2013, 82, 83–92. [Google Scholar] [CrossRef]
- Hijmans, R.J. Raster: Geographic Data Analysis and Modeling. R Package Version 2.8-4. 2018. Available online: https://CRAN.R-project.org/package=raster (accessed on 19 December 2018).
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 6, 610–621. [Google Scholar] [CrossRef]
- Zvoleff, A. glcm: Calculate Textures from Grey-Level Co-Occurrence Matrices (GLCMs). R Package Version 1.6.1. 2016. Available online: https://CRAN.R-project.org/package=glcm (accessed on 19 December 2018).
- Regional Centre for Forest Management and Ecosystem Management Services. Report on The Management Inventory of the North Selangor Peat Swamp Forest; Malaysian-DANCED Project on Sustainable Managment of Peat Swamp Forest; Project Document Number 25; Malaysia Office: Petaling Jaya, Malaysia, 2000. [Google Scholar]
- Chave, J.; Réjou-Méchain, M.; Búrquez, A.; Chidumayo, E.; Colgan, M.S.; Delitti, W.B.; Duque, A.; Eid, T.; Fearnside, P.M.; Goodman, R.C.; et al. Improved allometric models to estimate the aboveground biomass of tropical trees. Glob. Chang. Biol. 2014, 20, 3177–3190. [Google Scholar] [CrossRef] [PubMed]
- Feldpausch, T.R.; Lloyd, J.; Lewis, S.L.; Brienen, R.J.W.; Gloor, M.; Mendoza, A.M.; Lopez-Gonzalez, G.; Banin, L.; Abu Salim, K.; Affum-Baffoe, K.; et al. Tree height integrated into pantropical forest biomass estimates. Biogeosciences 2012, 9, 3381–3403. [Google Scholar] [CrossRef]
- Chauve, A.; Bretar, F.; Durrieu, S.; Pierrot-Deseilligny, M.; Puech, W. Fullanalyze: A research tool for handling, processing and analyzing full-waveform LiDAR data. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; Volume 4, p. IV-841. [Google Scholar]
- Zanne, A.E.; Lopez-Gonzalez, G.; Coomes, D.A.; Ilic, J.; Jansen, S.; Lewis, S.L.; Miller, R.B.; Swenson, N.G.; Wiemann, M.C.; Chave, J. Global Wood Density Database. Dryad Identifier. 2009. Available online: http://hdl.handle.net/10255/dryad.235 (accessed on 19 December 2018).
- Réjou-Méchain, M.; Tanguy, A.; Piponiot, C.; Chave, J.; Hérault, B. biomass: An r package for estimating above-ground biomass and its uncertainty in tropical forests. Methods Ecol. Evol. 2017, 8, 1163–1167. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Karlson, M.; Ostwald, M.; Reese, H.; Sanou, J.; Tankoano, B.; Mattsson, E. Mapping tree canopy cover and aboveground biomass in Sudano-Sahelian woodlands using Landsat 8 and random forest. Remote Sens. 2015, 7, 10017–10041. [Google Scholar] [CrossRef]
- Main-Knorn, M.; Moisen, G.G.; Healey, S.P.; Keeton, W.S.; Freeman, E.A.; Hostert, P. Evaluating the remote sensing and inventory-based estimation of biomass in the Western Carpathians. Remote Sens. 2011, 3, 1427–1446. [Google Scholar] [CrossRef]
- Curran, P.J.; Hay, A.M. The importance of measurement error for certain procedures in remote sensing at optical wavelengths. Photogramm. Eng. Remote Sens. 1986, 52, 229–241. [Google Scholar]
- Wright, M.N.; Ziegler, A. ranger: A fast implementation of random forests for high dimensional data in C++ and R. arXiv 2015, arXiv:1508.04409. [Google Scholar] [CrossRef]
- Davies, J. Training Module on Peatland Assessment and Management. In ASEAN Peatland Forests Project; ASEAN Secretariat and Global Environment Centre: Kuala Lumpur, Malaysia, 2011. [Google Scholar]
- Prentice, R.C. The Peatland Biodiversity Management Toolbox: A Handbook for the Conservation and Management of Peatland Biodiversity in Southeast Asia. In A Compilation. ASEAN Peatland Forests Project–Rehabilitation and Sustainable Use of Peatland Forests in Southeast Asia; ASEAN Secretariat and the Global Environment Centre: Kuala Lumpur, Malaysia, 2011. [Google Scholar]
- Secretariat, A.S.E.A.N.; Global Environment Centre. Peatlands in Southeast Asia–A Profile. Rehabilitation and Sustainable Use of Peatland Forests in Southeast Asia, ASEAN Peatland Forests Project; ASEAN Secretariat: Jakarta, Indonesia, 2011. [Google Scholar]
- Alam, M.J.; Rengasamy, N.; bin Dahalan, M.P.; Halim, S.A.; Nath, T.K. Socio-economic and ecological outcomes of a community-based restoration of peatland swamp forests in Peninsular Malaysia: A 5Rs approach. Land Use Policy 2022, 122, 106390. [Google Scholar] [CrossRef]
- Cattau, M.E.; Harrison, M.E.; Shinyo, I.; Tungau, S.; Uriarte, M.; DeFries, R. Sources of anthropogenic fire ignitions on the peat-swamp landscape in Kalimantan, Indonesia. Glob. Environ. Chang. 2016, 39, 205–219. [Google Scholar] [CrossRef]
- Page, S.; Hosciło, A.; Wösten, H.; Jauhiainen, J.; Silvius, M.; Rieley, J.; Ritzema, H.; Tansey, K.; Graham, L.; Vasander, H.; et al. Restoration ecology of lowland tropical peatlands in Southeast Asia: Current knowledge and future research directions. Ecosystems 2009, 12, 888–905. [Google Scholar] [CrossRef]
- Dahalan, M.P.; Manaf, M.B.A.; Rahman, B.H.A.; Khalid, S.M.A.S.; Sukri, A.M.; Yusoff, D.M.; Muda, M. Implementation of Integrated Management Plan for North Selangor Peat Swamp Forest 2014–2023. In Proceedings of the 15th International Peat Congress, Sarawak, Malaysia, 15–19 August 2016; pp. 15–19. [Google Scholar]
- Rengasamy, N.; Parish, F.; Lew, S.Y.; Azura, N. Peatland Rehabilitation Efforts in North Selangor Peat Swamp Forests. In Proceedings of the 15th International Peat Congress, Sarawak, Malaysia, 15–19 August 2016. [Google Scholar]
- Wösten, J.H.M.; Rieley, J.O.; Page, S.E. Restoration of Tropical Peatlands; Alterra—Wageningen University and Research Centre, and the EU INCO—RESTORPEAT Partnership: Wageningen, The Netherlands, 2008; 252p, ISBN 978-90-327-0361-5. [Google Scholar]
- Adam, E.; Mutanga, O.; Abdel-Rahman, E.M.; Ismail, R. Estimating standing biomass in papyrus (Cyperus papyrus L.) swamp: Exploratory of in situ hyperspectral indices and random forest regression. Int. J. Remote Sens. 2014, 35, 693–714. [Google Scholar] [CrossRef]
- Lawrence, R.L.; Wood, S.D.; Sheley, R.L. Mapping invasive plants using hyperspectral imagery and Breiman Cutler classifications (RandomForest). Remote Sens. Environ. 2006, 100, 356–362. [Google Scholar] [CrossRef]
- Chrysafis, I.; Mallinis, G.; Siachalou, S.; Patias, P. Assessing the relationships between growing stock volume and Sentinel-2 imagery in a Mediterranean forest ecosystem. Remote Sens. Lett. 2017, 8, 508–517. [Google Scholar] [CrossRef]
- Laurin, G.V.; Puletti, N.; Hawthorne, W.; Liesenberg, V.; Corona, P.; Papale, D.; Chen, Q.; Valentini, R. Discrimination of tropical forest types, dominant species, and mapping of functional guilds by hyperspectral and simulated multispectral Sentinel-2 data. Remote Sens. Environ. 2016, 176, 163–176. [Google Scholar] [CrossRef]
- Sarker, L.R.; Nichol, J.E. Improved forest biomass estimates using ALOS AVNIR-2 texture indices. Remote Sens. Environ. 2011, 115, 968–977. [Google Scholar] [CrossRef]
- Cracknell, M.J.; Reading, A.M. Geological mapping using remote sensing data: A comparison of five machine learning algorithms, their response to variations in the spatial distribution of training data and the use of explicit spatial information. Comput. Geosci. 2014, 63, 22–33. [Google Scholar] [CrossRef]
- Ham, J.; Chen, Y.; Crawford, M.M.; Ghosh, J. Investigation of the random forest framework for classification of hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 492–501. [Google Scholar] [CrossRef]
- Pettorelli, N.; Laurance, W.F.; O’Brien, T.G.; Wegmann, M.; Nagendra, H.; Turner, W. Satellite remote sensing for applied ecologists: Opportunities and challenges. J. Appl. Ecol. 2014, 51, 839–848. [Google Scholar] [CrossRef]
- Nagendra, H.; Lucas, R.; Honrado, J.P.; Jongman, R.H.; Tarantino, C.; Adamo, M.; Mairota, P. Remote sensing for conservation monitoring: Assessing protected areas, habitat extent, habitat condition, species diversity, and threats. Ecol. Indic. 2013, 33, 45–59. [Google Scholar] [CrossRef]
- Panta, M.; Kim, K.; Joshi, C. Temporal mapping of deforestation and forest degradation in Nepal: Applications to forest conservation. For. Ecol. Manag. 2008, 256, 1587–1595. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Townsend, P.A.; Gross, J.E.; Cohen, W.B.; Bolstad, P.; Wang, Y.Q.; Adams, P. Remote sensing change detection tools for natural resource managers: Understanding concepts and tradeoffs in the design of landscape monitoring projects. Remote Sens. Environ. 2009, 113, 1382–1396. [Google Scholar] [CrossRef]
- Willis, K.S. Remote sensing change detection for ecological monitoring in United States protected areas. Biol. Conserv. 2015, 182, 233–242. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Andréfouët, S.; Cohen, W.B.; Gómez, C.; Griffiths, P.; Hais, M.; Healey, S.P.; Helmer, E.H.; Hostert, P.; Lyons, M.B.; et al. Bringing an ecological view of change to Landsat-based remote sensing. Front. Ecol. Environ. 2014, 12, 339–346. [Google Scholar] [CrossRef] [PubMed]
- Duncanson, L.; Armston, J.; Disney, M.; Avitabile, V.; Barbier, N.; Calders, K.; Carter, S.; Chave, J.; Herold, M.; Crowther, T.W.; et al. The importance of consistent global forest aboveground biomass product validation. Surv. Geophys. 2019, 40, 979–999. [Google Scholar] [CrossRef] [PubMed]
- Butler, D. Many eyes on Earth: Swarms of small satellites set to deliver close to real-time imagery of swathes of the planet. Nature 2014, 505, 143–144. [Google Scholar] [CrossRef] [PubMed]
- Sandau, R.; Brieß, K.; D’Errico, M. Small satellites for global coverage: Potential and limits. ISPRS J. Photogramm. Remote Sens. 2010, 65, 492–504. [Google Scholar] [CrossRef]
- Hand, E. Startup liftoff. Science 2015, 348, 172. [Google Scholar] [CrossRef]
- Gill, E.; Sundaramoorthy, P.; Bouwmeester, J.; Zandbergen, B.; Reinhard, R. Formation flying within a constellation of nano-satellites: The QB50 mission. Acta Astronaut. 2013, 82, 110–117. [Google Scholar] [CrossRef]
- Safyan, M. Planet’s dove satellite constellation. In Handbook of Small Satellites: Technology, Design, Manufacture, Applications, Economics and Regulation; Springer International Publishing: Cham, Switzerland, 2020; pp. 1057–1073. [Google Scholar]
- Planet Labs. Tracking Forests Globally. High Quality, Accessible, and Consistent Data on Global Forest Change. 2024. Available online: https://www.planet.com/products/forest-carbon/ (accessed on 4 May 2024).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vegetation Index | Equation | Sentinel-2 MSI Bands Used |
|---|---|---|
| Normalised Difference Vegetation Index (NDVI) | = (NIR − R)/(NIR + R) | = (band 8 − band 4)/(band 8 + band 4) |
| Normalised Difference Vegetation Index Red-Edge band 5 (NDVI-RE5) | = (NIR − RE1)/(NIR + RE1) | = (band 8 − band 5)/(band 8 + band 5) |
| Normalised Difference Vegetation Index Red-Edge band 6 (NDVI-RE6) | = (NIR − RE2)/(NIR + RE2) | = (band 8 − band 6)/(band 8 + band 6) |
| Normalised Difference Vegetation Index Red-Edge band 7 (NDVI-RE7) | = (NIR − RE3)/(NIR + RE3) | = (band 8 − band 7)/(band 8 + band 7) |
| Simple Ratio (SR) | = NIR/R | = band 8/band 4 |
| Simple Ratio Red-Edge band 5 (SR-RE5) | = NIR/RE1 | = band 8/band 5 |
| Simple Ratio Red-Edge band 6 (SR-RE6) | = NIR/RE2 | = band 8/band 6 |
| Simple Ratio Red-Edge band 7 (SR-RE7) | = NIR/RE3 | = band 8/band 7 |
| Inverted Red-Edge Chlorophyll Index (IRECI) | = (NIR − R)/(RE1/RE2) | = (band 8 − band 4)/(band 5/band 6) |
| Sentinel-2 Red-Edge Position (S2REP) | = 705 + 35 × ((((NIR + R)/2) − RE1)/(RE2 − RE1)) | = 705 + 35 × ((((band 8 + band 4)/2) − band 5)/(band 6 − band 5)) |
| Predictive Model | R2 | RMSE (Mg/ha) | rRMSE (%) |
|---|---|---|---|
| AGB = 171.3732 + 14.7802 × H_mean − 1.5752 × B50 | 0.77 | 39.8 | 10.8 |
| Sample Number | Mean | Median | SD | Minimum | Maximum |
|---|---|---|---|---|---|
| 949,119 | 224.53 | 221.79 | 122.6242 | 24.02 | 600.00 |
| Number of Validation Points | R2 | Adj-R2 | RMSE (Mg/ha) | %RMSE | Bias |
|---|---|---|---|---|---|
| 284,736 | 0.80 | 0.80 | 55.2 | 24.6% | −0.15 |
| Number of Validation Points | R2 | Adj-R2 | RMSE (Mg/ha) | %RMSE | Bias |
|---|---|---|---|---|---|
| 17 | 0.92 | 0.92 | 23.4 | 8.73% | −5.45 |
| AGB Gain | P1 | This large central section of NSPSF has been designated by the IMP as a water catchment forest. P1 covers the deepest areas of peat soil and potential peat domes; this area plays a vital role in water storage and the regulation function of NSPSF. Between the years 2015 and 2018, the key goals of the management designation were forest protection and blocking of the main drainage canals to encourage natural regeneration. The AGB gains provide evidence of the successful regeneration of P1 and present a good example of sustainable management of tropical peat swamp forest. |
| C2 | This section of NSPSF covers both central areas of the forest (neighbouring P1) and areas of forest on the reserve boundary. These areas have been designated by the IMP as a conservation zone. In the past, this area was heavily degraded by intensive logging activities and associated drainage; however, in 2018, the forest was recovering well, supported by AGB gain values (Figure 8). Although the majority of C2 shows AGB gain, there is a focused area of AGB loss at the northern boundary (Figure 9). This is thought to be in association with peat drainage and potential peat subsidence linked to ex-logging canals that connect to drains along the Tanjong Malim–Sg Besar road (road upgrade, high drains, and culverts) and oil palm plantations. | |
| AGB Loss | E5 | This section of NSPSF covers a relatively small area, designated in the IMP as an education and ecotourism zone. However, it is adjacent to zones R2 and R1, which are areas of severely degraded peat swamp annually affected by large scale fire events. E5 and the neighbouring R2 and R1 zones underwent major management interventions between 2015 and 2018, including large-scale drain blocking campaigns and replanting schemes (Figure 10); however, frequent fire events have hampered recovery efforts, seen by the AGB loss in E5. The loss of AGB in E5 may also be linked to overdrainage in adjacent oil palm outside of the forest reserve boundary affecting water levels in the forest reserve. |
| R3 | This section covers the western boundary of the reserve directly adjacent to the main irrigation canal of the IADA Rice Scheme. It is designated in the IMP as a rehabilitation zone. The area was negatively impacted by the construction of a peat/clay bund in 2010, which prevented water flow from the forest to the main irrigation canal. The artificially high water flow levels led to significant tree death and impacted the integrity of the peat soil structure. In 2011, culverts were installed in an effort to restore the natural hydrology of the area; however, these were again too high and flooded the forest leading to further water management adjustments in 2012. Although efforts of regeneration and water table recovery have been made in this section, it is evident that these areas bordering the reserve still face significant forest loss. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brown, C.; Sjögersten, S.; Ledger, M.J.; Parish, F.; Boyd, D. Remote Sensing for Restoration Change Monitoring in Tropical Peat Swamp Forests in Malaysia. Remote Sens. 2024, 16, 2690. https://doi.org/10.3390/rs16152690
Brown C, Sjögersten S, Ledger MJ, Parish F, Boyd D. Remote Sensing for Restoration Change Monitoring in Tropical Peat Swamp Forests in Malaysia. Remote Sensing. 2024; 16(15):2690. https://doi.org/10.3390/rs16152690
Chicago/Turabian StyleBrown, Chloe, Sofie Sjögersten, Martha J. Ledger, Faizal Parish, and Doreen Boyd. 2024. "Remote Sensing for Restoration Change Monitoring in Tropical Peat Swamp Forests in Malaysia" Remote Sensing 16, no. 15: 2690. https://doi.org/10.3390/rs16152690
APA StyleBrown, C., Sjögersten, S., Ledger, M. J., Parish, F., & Boyd, D. (2024). Remote Sensing for Restoration Change Monitoring in Tropical Peat Swamp Forests in Malaysia. Remote Sensing, 16(15), 2690. https://doi.org/10.3390/rs16152690