

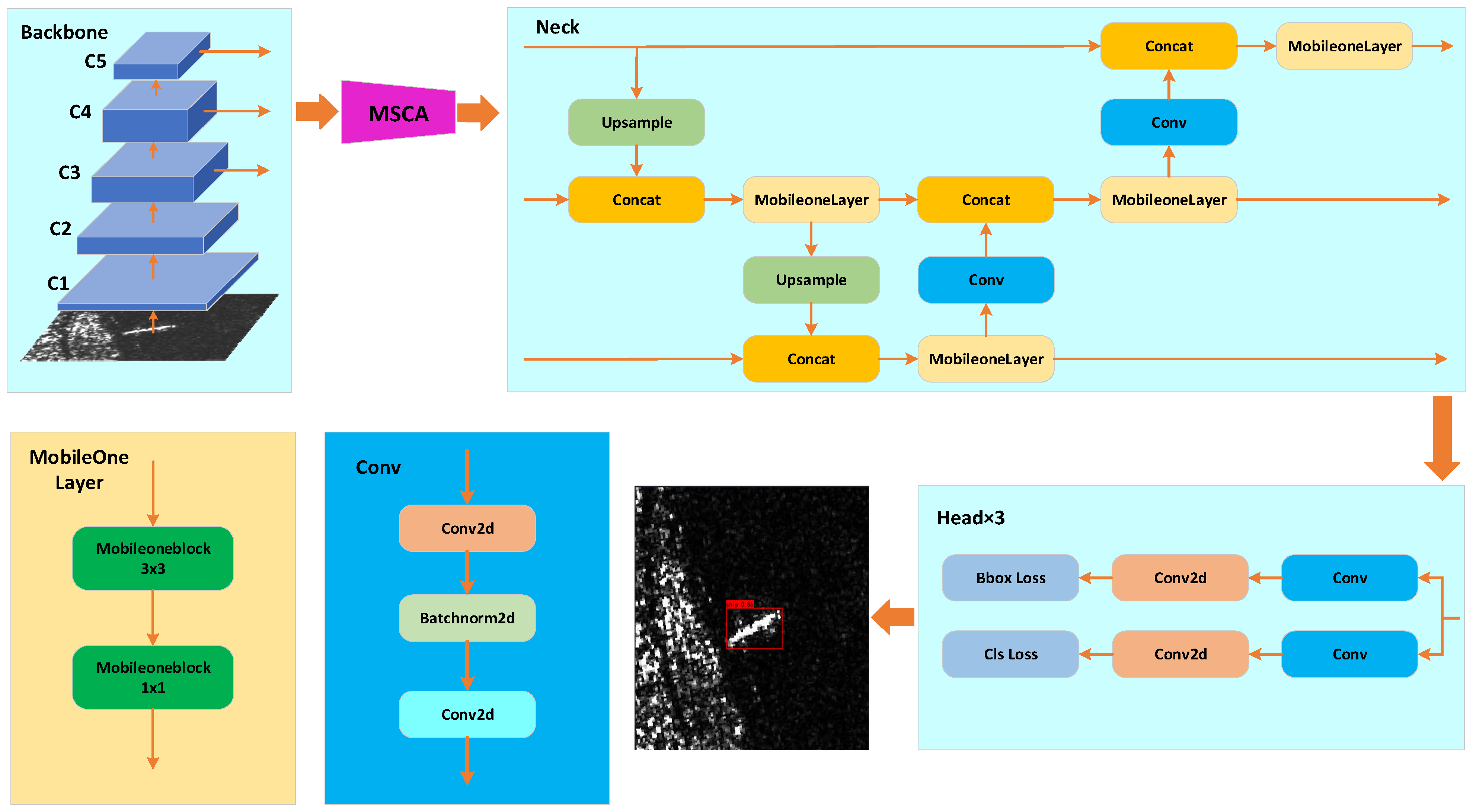
MSSD-Net: Multi-Scale SAR Ship Detection Network


Abstract
1. Introduction
2. Materials and Methods
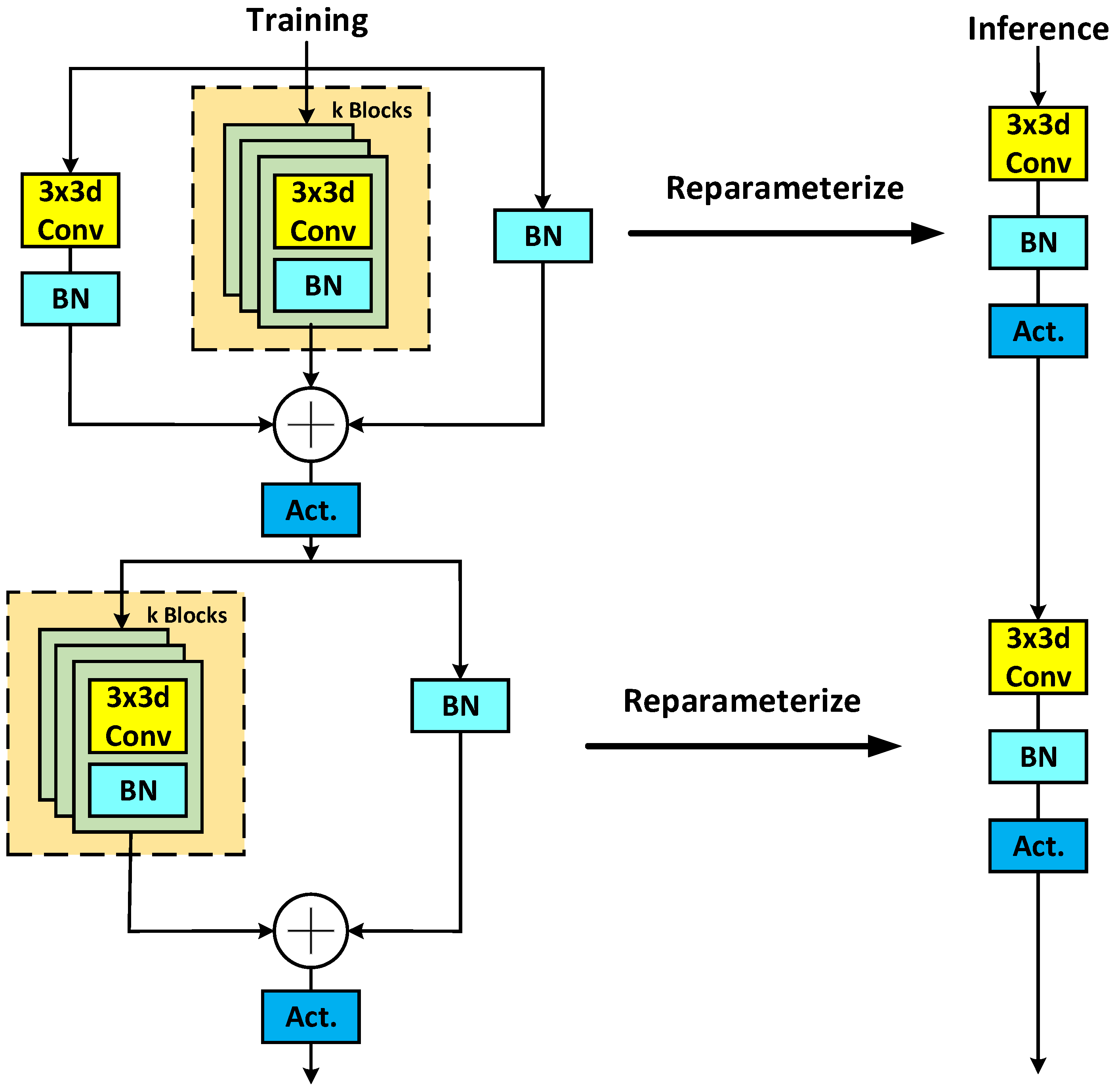
2.1. Lightweight Backbone Network: MobileOne
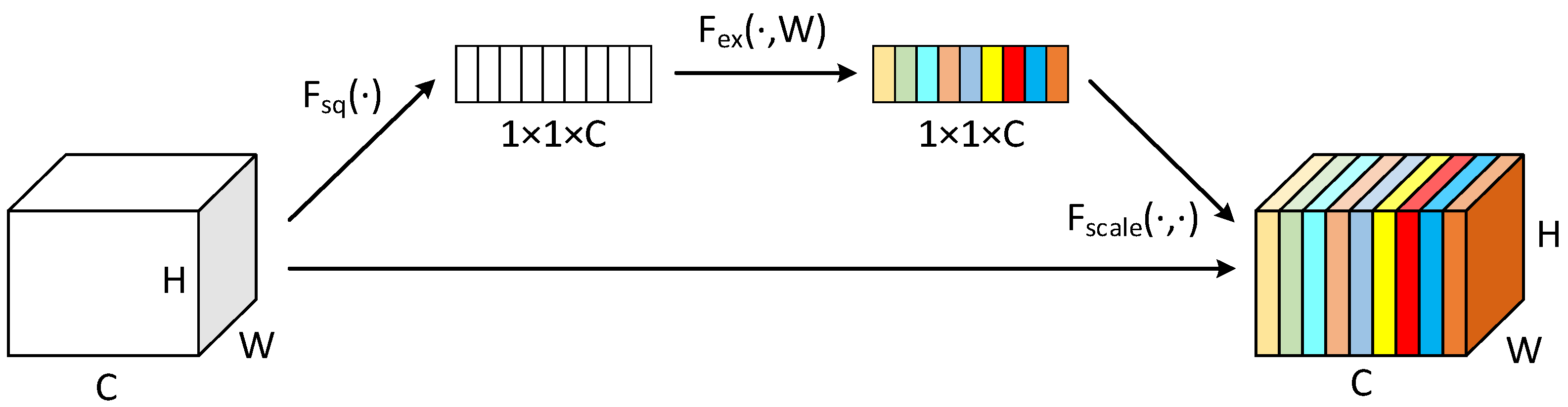
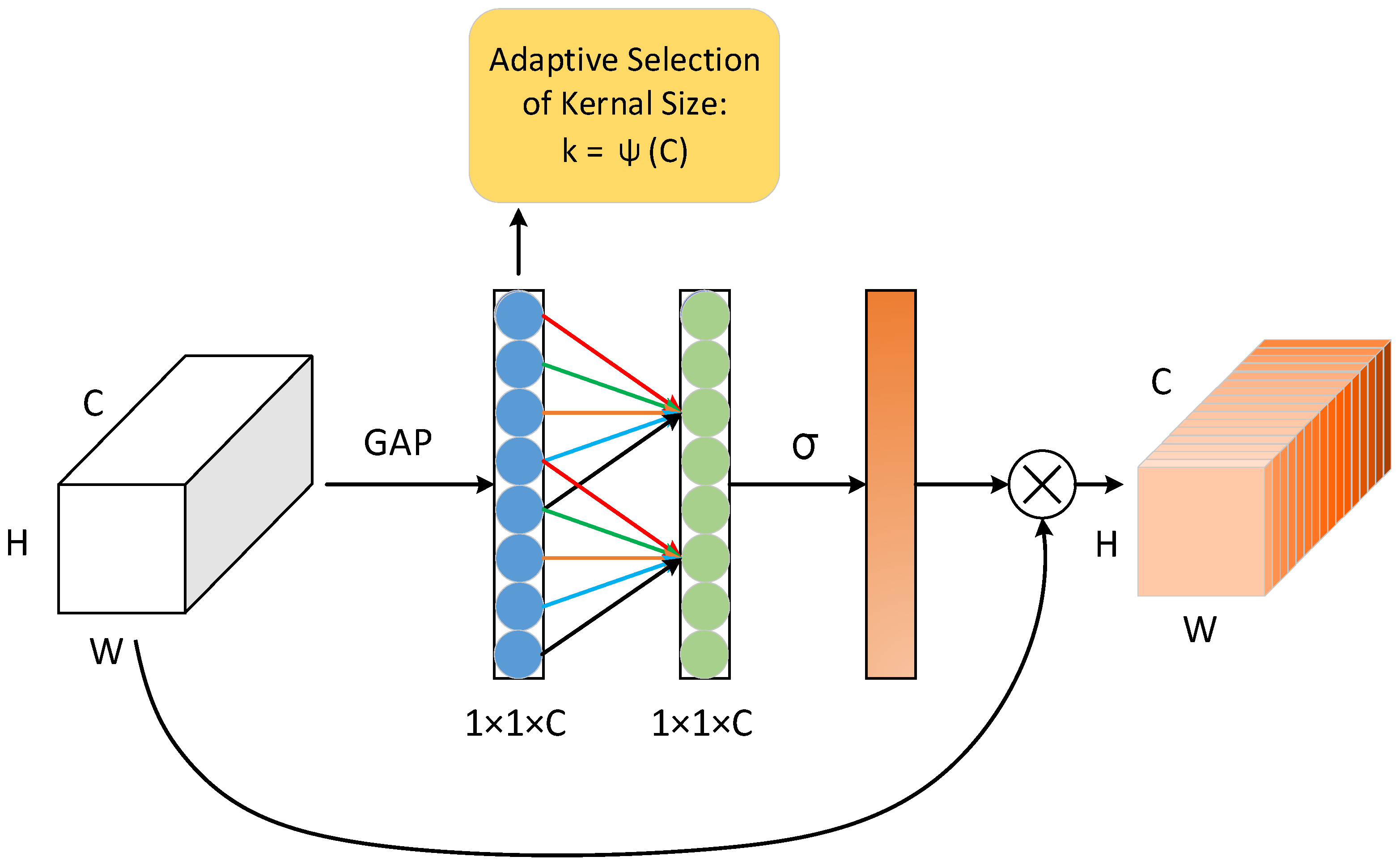
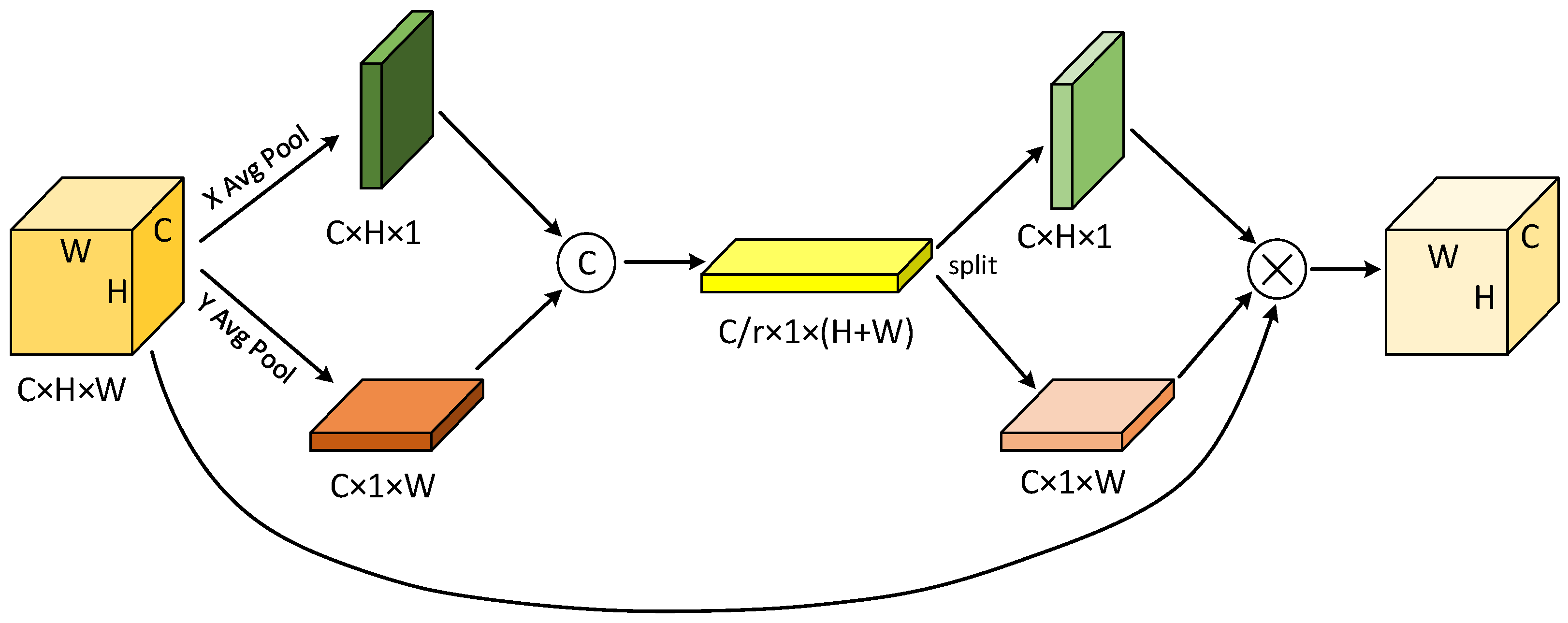
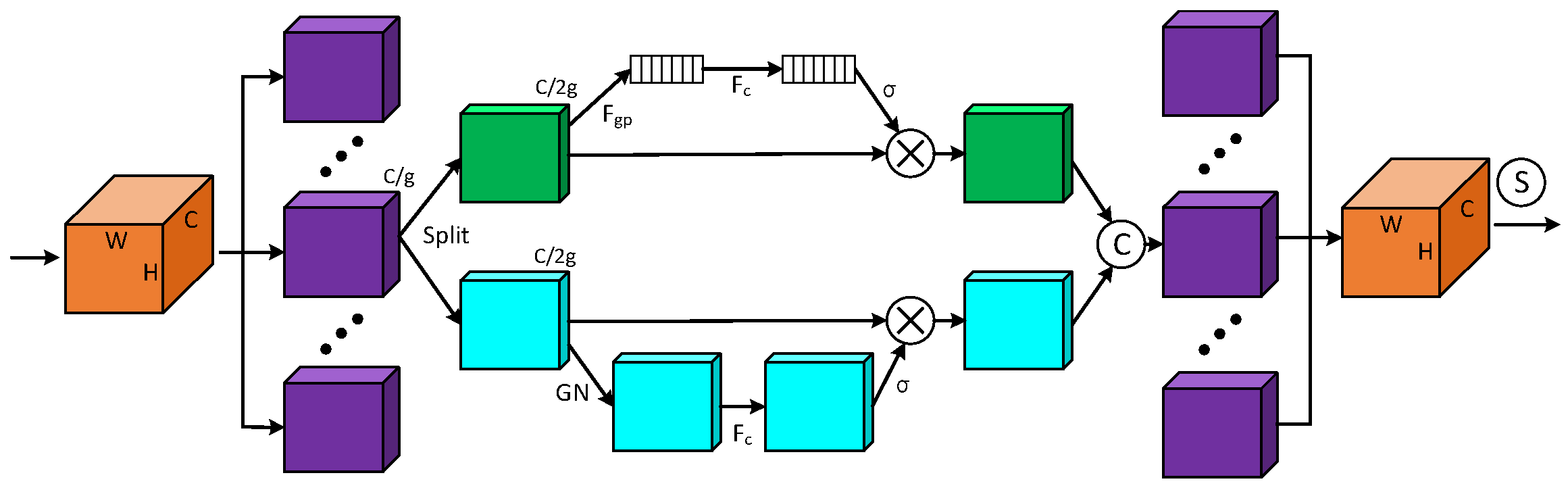
2.2. Multi-Scale Coordinate Attention Module: MSCA
2.3. Feature Pyramid Neck Network: FPN + PAN
2.4. Detection Head: Anchor-Free
3. Results
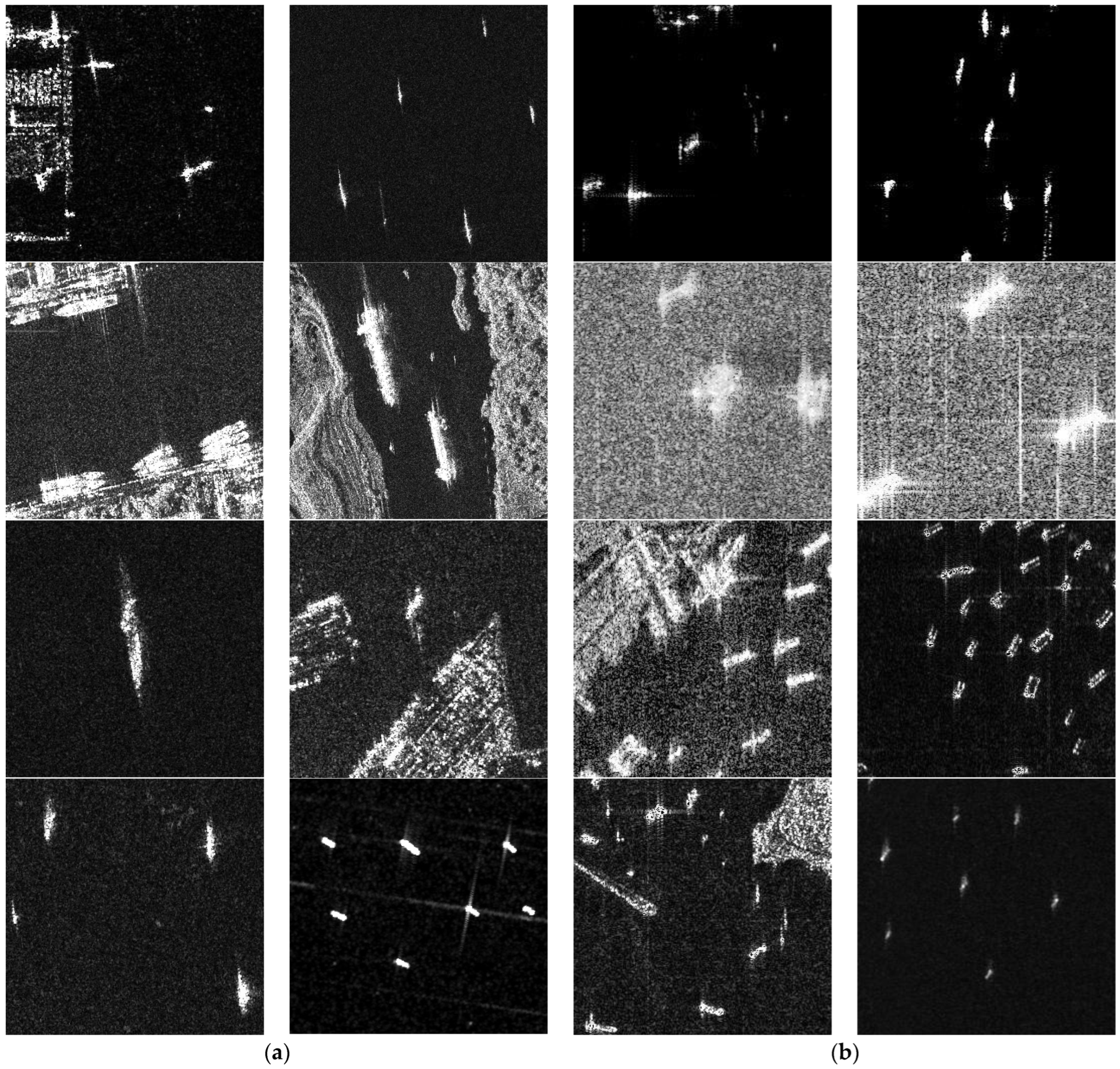
3.1. Datasets
3.2. Implementation Details
3.3. Evaluation Index
3.4. Deep Learning Experiment
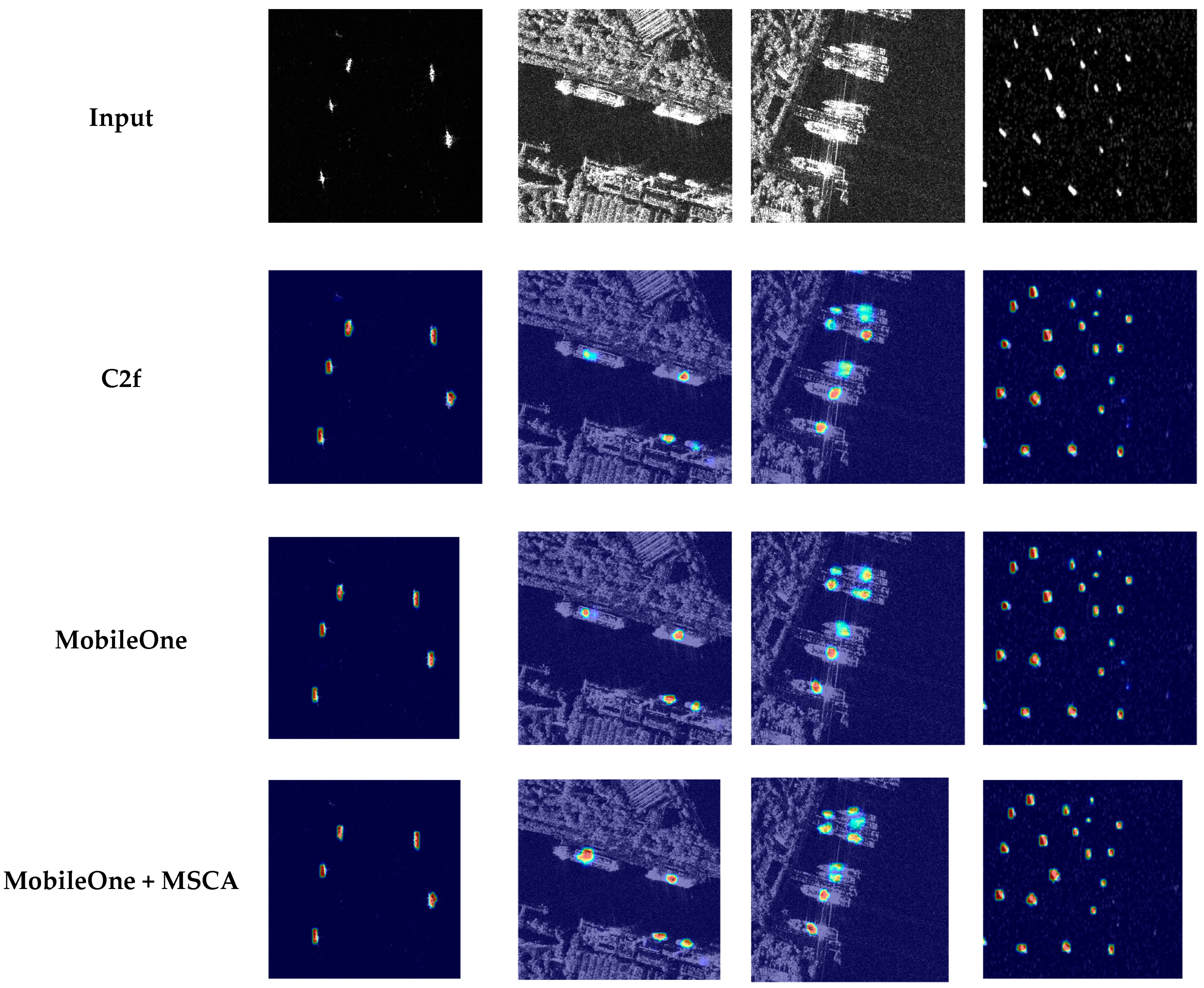
3.5. Ablation Experiment
3.6. Experiments with Different Datasets
3.7. Comparative Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kim, K.; Kang, J.; Kim, J.-H. Phase calibration for ideal wideband chirp in satellite-based synthetic aperture radar. ICT Express 2022, 8, 490–493. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, X.; Zhang, J.; Gao, G.; Dai, Y.S.; Liu, G.W.; Jia, Y.J.; Wang, X.C.; Zhang, Y.; Bao, M. Evaluation and Improvement of Generalization Performance of SAR Ship Recognition Algorithms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 9311–9326. [Google Scholar] [CrossRef]
- Liu, M.Q.; Zhu, B.; Ma, H.B. A New Synthetic Aperture Radar Ship Detector Based on Clutter Intensity Statistics in Complex Environments. Remote Sens. 2024, 16, 664. [Google Scholar] [CrossRef]
- Chen, W.; Xing, X.; Ji, K. A Survey of Ship Target Recognition in SAR Images. Mod. Radar 2012, 34, 53–58. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. arXiv 2015, arXiv:1506.01497. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. arXiv 2015, arXiv:1512.02325. [Google Scholar] [CrossRef]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: Fully Convolutional One-Stage Object Detection. arXiv 2019, arXiv:1904.01355. [Google Scholar] [CrossRef]
- Wang, Z.X.; Hou, G.Y.; Xin, Z.H.; Liao, G.S.; Huang, P.H.; Tai, Y.H. Detection of SAR Image Multiscale Ship Targets in Complex Inshore Scenes Based on Improved YOLOv5. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 5804–5823. [Google Scholar] [CrossRef]
- Wu, W.H.; Wong, M.S.; Yu, X.Y.; Shi, G.Q.; Kwok, C.Y.T.; Zou, K. Compositional Oil Spill Detection Based on Object Detector and Adapted Segment Anything Model from SAR Images. IEEE Geosci. Remote Sens. Lett. 2024, 21, 4007505. [Google Scholar] [CrossRef]
- Yang, Y.G.; Ju, Y.W.; Zhou, Z.Y. A Super Lightweight and Efficient SAR Image Ship Detector. IEEE Geosci. Remote Sens. Lett. 2023, 20, 4006805. [Google Scholar] [CrossRef]
- Howard, A.; Sandler, M.; Chu, G.; Chen, L.-C.; Chen, B.; Tan, M.; Wang, W.; Zhu, Y.; Pang, R.; Vasudevan, V.; et al. Searching for MobileNetV3. arXiv 2019, arXiv:1905.02244. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, X.; Lin, M.; Sun, J. ShuffleNet: An Extremely Efficient Convolutional Neural Network for Mobile Devices. arXiv 2017, arXiv:1707.01083. [Google Scholar] [CrossRef]
- Chollet, F. Xception: Deep Learning with Depthwise Separable Convolutions. arXiv 2016, arXiv:1610.02357. [Google Scholar] [CrossRef]
- Han, K.; Wang, Y.; Tian, Q.; Guo, J.; Xu, C.; Xu, C. GhostNet: More Features from Cheap Operations. arXiv 2019, arXiv:1911.11907. [Google Scholar] [CrossRef]
- Tan, M.; Le, Q.V. MixConv: Mixed Depthwise Convolutional Kernels. arXiv 2019, arXiv:1907.09595. [Google Scholar] [CrossRef]
- Dong, X.; Li, D.; Fang, J. FCCD-SAR: A Lightweight SAR ATR Algorithm Based on FasterNet. Sensors 2023, 23, 6956. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.; Chen, J.; Huang, Z.; Lv, J.; Song, J.; Luo, H.; Wu, B.; Li, Y.; Diniz, P.S.R. HRLE-SARDet: A Lightweight SAR Target Detection Algorithm Based on Hybrid Representation Learning Enhancement. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5203922. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, S.; Zhan, R.; Wang, W.; Zhang, J. LMSD-YOLO: A Lightweight YOLO Algorithm for Multi-Scale SAR Ship Detection. Remote Sens. 2022, 14, 4801. [Google Scholar] [CrossRef]
- Yan, G.; Chen, Z.; Wang, Y.; Cai, Y.; Shuai, S. LssDet: A Lightweight Deep Learning Detector for SAR Ship Detection in High-Resolution SAR Images. Remote Sens. 2022, 14, 5148. [Google Scholar] [CrossRef]
- Tian, C.; Liu, D.; Xue, F.; Lv, Z.; Wu, X. Faster and Lighter: A Novel Ship Detector for SAR Images. IEEE Geosci. Remote Sens. Lett. 2024, 21, 4002005. [Google Scholar] [CrossRef]
- Tang, H.; Gao, S.; Li, S.; Wang, P.; Liu, J.; Wang, S.; Qian, J. A Lightweight SAR Image Ship Detection Method Based on Improved Convolution and YOLOv7. Remote Sens. 2024, 16, 486. [Google Scholar] [CrossRef]
- Chen, C.X.; Zhang, Y.M.; Hu, R.L.; Yu, Y.T. A Lightweight SAR Ship Detector Using End-to-End Image Preprocessing Network and Channel Feature Guided Spatial Pyramid Pooling. IEEE Geosci. Remote Sens. Lett. 2024, 21, 4003605. [Google Scholar] [CrossRef]
- Zhao, L.J.; Ning, F.; Xi, Y.B.; Liang, G.; He, Z.L.; Zhang, Y.Y. MSFA-YOLO: A Multi-Scale SAR Ship Detection Algorithm Based on Fused Attention. IEEE Access 2024, 12, 24554–24568. [Google Scholar] [CrossRef]
- Tang, X.; Zhang, J.F.; Xia, Y.Z.; Xiao, H.L. DBW-YOLO: A High-Precision SAR Ship Detection Method for Complex Environments. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 7029–7039. [Google Scholar] [CrossRef]
- Anasosalu Vasu, P.K.; Gabriel, J.; Zhu, J.; Tuzel, O.; Ranjan, A. MobileOne: An Improved One millisecond Mobile Backbone. arXiv 2022, arXiv:2206.04040. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. arXiv 2016, arXiv:1612.03144. [Google Scholar] [CrossRef]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path Aggregation Network for Instance Segmentation. arXiv 2018, arXiv:1803.01534. [Google Scholar] [CrossRef]
- Zhang, S.; Chi, C.; Yao, Y.; Lei, Z.; Li, S.Z. Bridging the Gap Between Anchor-based and Anchor-free Detection via Adaptive Training Sample Selection. arXiv 2019, arXiv:1912.02424. [Google Scholar] [CrossRef]
- Ding, X.; Zhang, X.; Ma, N.; Han, J.; Ding, G.; Sun, J. RepVGG: Making VGG-style ConvNets Great Again. arXiv 2021, arXiv:2101.03697. [Google Scholar] [CrossRef]
- Hu, J.; Shen, L.; Albanie, S.; Sun, G.; Wu, E. Squeeze-and-Excitation Networks. arXiv 2017, arXiv:1709.01507. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. arXiv 2019, arXiv:1910.03151. [Google Scholar] [CrossRef]
- Wen, X.; Zhang, S.M.; Wang, J.M.; Yao, T.J.; Tang, Y. A CFAR-Enhanced Ship Detector for SAR Images Based on YOLOv5s. Remote Sens. 2024, 16, 733. [Google Scholar] [CrossRef]
- Yu, F.; Koltun, V. Multi-Scale Context Aggregation by Dilated Convolutions. arXiv 2015, arXiv:1511.07122. [Google Scholar] [CrossRef]
- Hou, Q.; Zhou, D.; Feng, J. Coordinate Attention for Efficient Mobile Network Design. arXiv 2021, arXiv:2103.02907. [Google Scholar] [CrossRef]
- Zhang, Y.-B.; Yang, Q.-L. SA-Net: Shuffle Attention for Deep Convolutional Neural Networks. arXiv 2021, arXiv:2102.00240. [Google Scholar] [CrossRef]
- Yu, H.; Yang, S.H.; Zhou, S.P.; Sun, Y.B. VS-LSDet: A Multiscale Ship Detector for Spaceborne SAR Images Based on Visual Saliency and Lightweight CNN. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 1137–1154. [Google Scholar] [CrossRef]
- Wang, X.; Hong, W.; Liu, Y.Q.; Hu, D.M.; Xin, P. SAR Image Aircraft Target Recognition Based on Improved YOLOv5. Appl. Sci. 2023, 13, 6160. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, P.; Ren, D.; Liu, W.; Ye, R.; Hu, Q.; Zuo, W. Enhancing Geometric Factors in Model Learning and Inference for Object Detection and Instance Segmentation. arXiv 2020, arXiv:2005.03572. [Google Scholar] [CrossRef]
- Li, X.; Wang, W.; Wu, L.; Chen, S.; Hu, X.; Li, J.; Tang, J.; Yang, J. Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection. arXiv 2020, arXiv:2006.04388. [Google Scholar] [CrossRef]
- Mao, A.; Mohri, M.; Zhong, Y. Cross-Entropy Loss Functions: Theoretical Analysis and Applications. arXiv 2023, arXiv:2304.07288. [Google Scholar] [CrossRef]
- Zhang, T.W.; Zhang, X.L.; Li, J.W.; Xu, X.W.; Wang, B.Y.; Zhan, X.; Xu, Y.Q.; Ke, X.; Zeng, T.J.; Su, H.; et al. SAR Ship Detection Dataset (SSDD): Official Release and Comprehensive Data Analysis. Remote Sens. 2021, 13, 3690. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, C.; Zhang, H.; Dong, Y.; Wei, S. A SAR Dataset of Ship Detection for Deep Learning under Complex Backgrounds. Remote Sens. 2019, 11, 765. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar] [CrossRef]
- Tan, M.; Le, Q.V. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. arXiv 2019, arXiv:1905.11946. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Block Number | mAP (%) | P (%) | R (%) | F1 (%) | FLOPs (G) |
|---|---|---|---|---|---|---|
| 1 | [1,1,1,1] | 96.90 | 97.54 | 88.81 | 0.93 | 4.39 |
| 2 | [2,2,2,2] | 96.57 | 97.19 | 90.30 | 0.94 | 4.62 |
| 3 | [2,3,3,2] | 96.86 | 97.13 | 88.43 | 0.93 | 4.74 |
| 4 | [2,3,4,2] | 98.02 | 99.21 | 91.94 | 0.95 | 4.79 |
| 5 | [3,3,3,3] | 96.32 | 97.59 | 90.67 | 0.94 | 4.86 |
| 6 | [3,4,4,3] | 95.80 | 97.21 | 91.04 | 0.94 | 4.98 |
| 7 | [4,4,4,4] | 96.83 | 96.79 | 89.93 | 0.93 | 5.10 |
| Block Number | [1,1,1,1] | [2,2,2,2] | [2,3,3,2] | [2,3,4,2] | [3,3,3,3] | [3,4,4,3] | [4,4,4,4] |
|---|---|---|---|---|---|---|---|
| Train-param(M) | 2.265 | 2.641 | 2.734 | 2.807 | 3.017 | 3.111 | 3.394 |
| Infere-param(M) | 1.520 | 1.612 | 1.635 | 1.652 | 1.704 | 1.727 | 1.797 |
| Backbone | MSCA | mAP (%) | P (%) | R (%) | F1 (%) | Param (M) | |
|---|---|---|---|---|---|---|---|
| CA | SA | ||||||
| C2f | × | × | 97.18 | 97.50 | 92.13 | 0.95 | 2.302 |
| MobileOne | × | × | 97.45 | 97.05 | 90.55 | 0.94 | 1.477 |
| MobileOne | √ | × | 97.95 | 97.13 | 90.94 | 0.94 | 1.651 |
| MobileOne | √ | √ | 98.02 | 99.21 | 91.94 | 0.95 | 1.652 |
| Dataset | mAP (%) | P (%) | R (%) | F1 (%) |
|---|---|---|---|---|
| SSDD | 98.02 | 99.21 | 91.94 | 0.95 |
| SAR-Ship-Dataset | 93.80 | 93.57 | 83.61 | 0.88 |
| Method | mAP (%) | P (%) | R (%) | F1 (%) | Param (M) | FLOPs (G) |
|---|---|---|---|---|---|---|
| Faster-RCNN | 75.58 | 39.97 | 86.94 | 0.55 | 137.1 | 370.2 |
| FCOS | 97.16 | 94.55 | 90.67 | 0.93 | 32.1 | 161.9 |
| SSD | 84.71 | 94.33 | 49.63 | 0.65 | 26.3 | 62.7 |
| YOLOv5-s | 96.81 | 91.98 | 89.93 | 0.91 | 47.0 | 115.9 |
| YOLOv8-s | 98.48 | 99.19 | 89.38 | 0.94 | 11.2 | 28.8 |
| Ours | 98.02 | 99.21 | 91.94 | 0.95 | 1.6 | 4.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Xu, W.; Huang, P.; Tan, W. MSSD-Net: Multi-Scale SAR Ship Detection Network. Remote Sens. 2024, 16, 2233. https://doi.org/10.3390/rs16122233
Wang X, Xu W, Huang P, Tan W. MSSD-Net: Multi-Scale SAR Ship Detection Network. Remote Sensing. 2024; 16(12):2233. https://doi.org/10.3390/rs16122233
Chicago/Turabian StyleWang, Xi, Wei Xu, Pingping Huang, and Weixian Tan. 2024. "MSSD-Net: Multi-Scale SAR Ship Detection Network" Remote Sensing 16, no. 12: 2233. https://doi.org/10.3390/rs16122233
APA StyleWang, X., Xu, W., Huang, P., & Tan, W. (2024). MSSD-Net: Multi-Scale SAR Ship Detection Network. Remote Sensing, 16(12), 2233. https://doi.org/10.3390/rs16122233