
Remote Sensing Image Harmonization Method for Fine-Grained Ship Classification



Abstract

1. Introduction
2. Methods
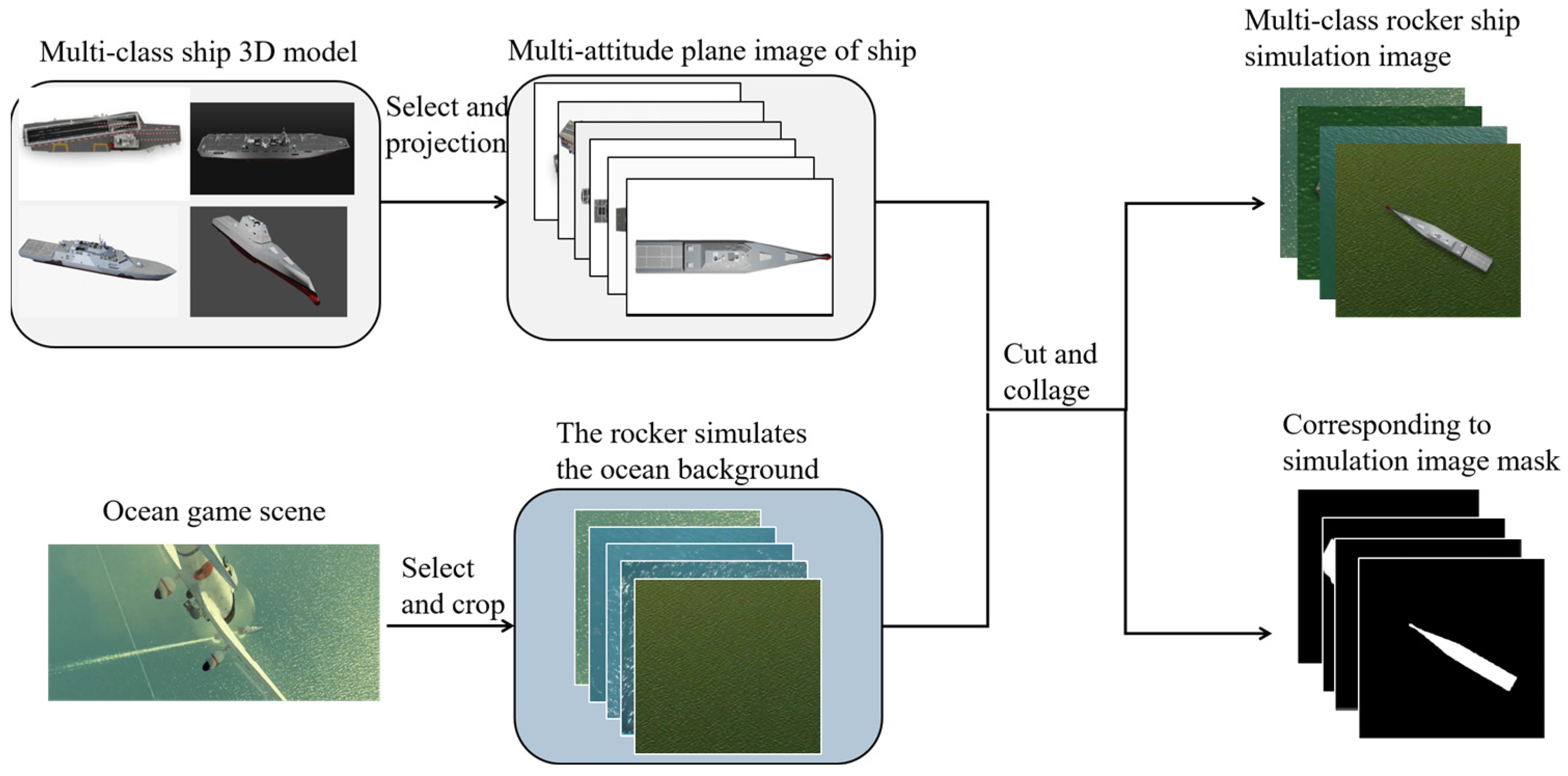
2.1. Simulated Remote Sensing Ship Image Construction
2.2. Data Augmentation Model Based on Transfer Learning
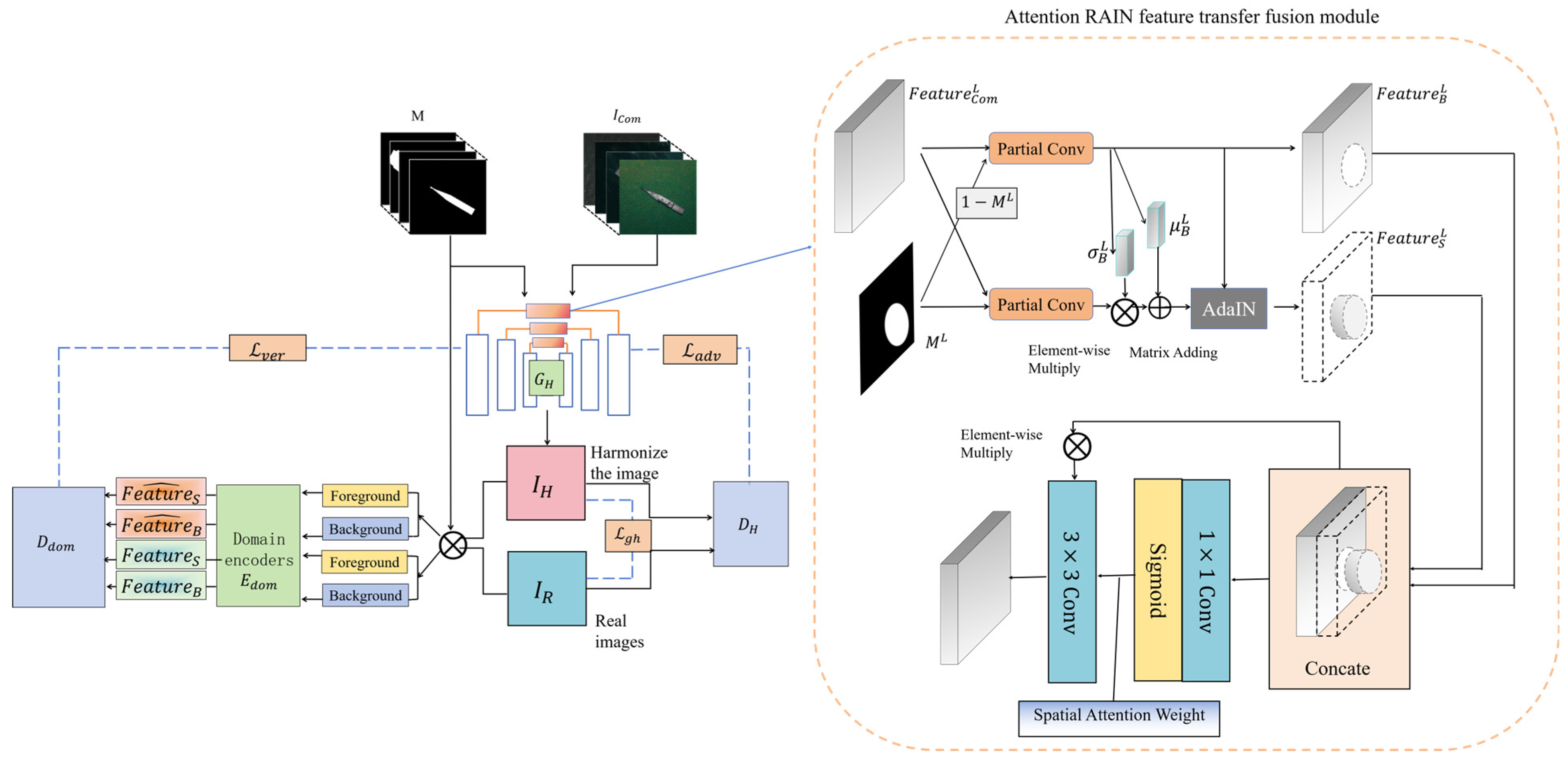
2.3. Remote Sensing Ship Image Harmonization Algorithm
3. Results
3.1. Dataset
3.2. Experimental Environment
3.3. Ablation Experiment
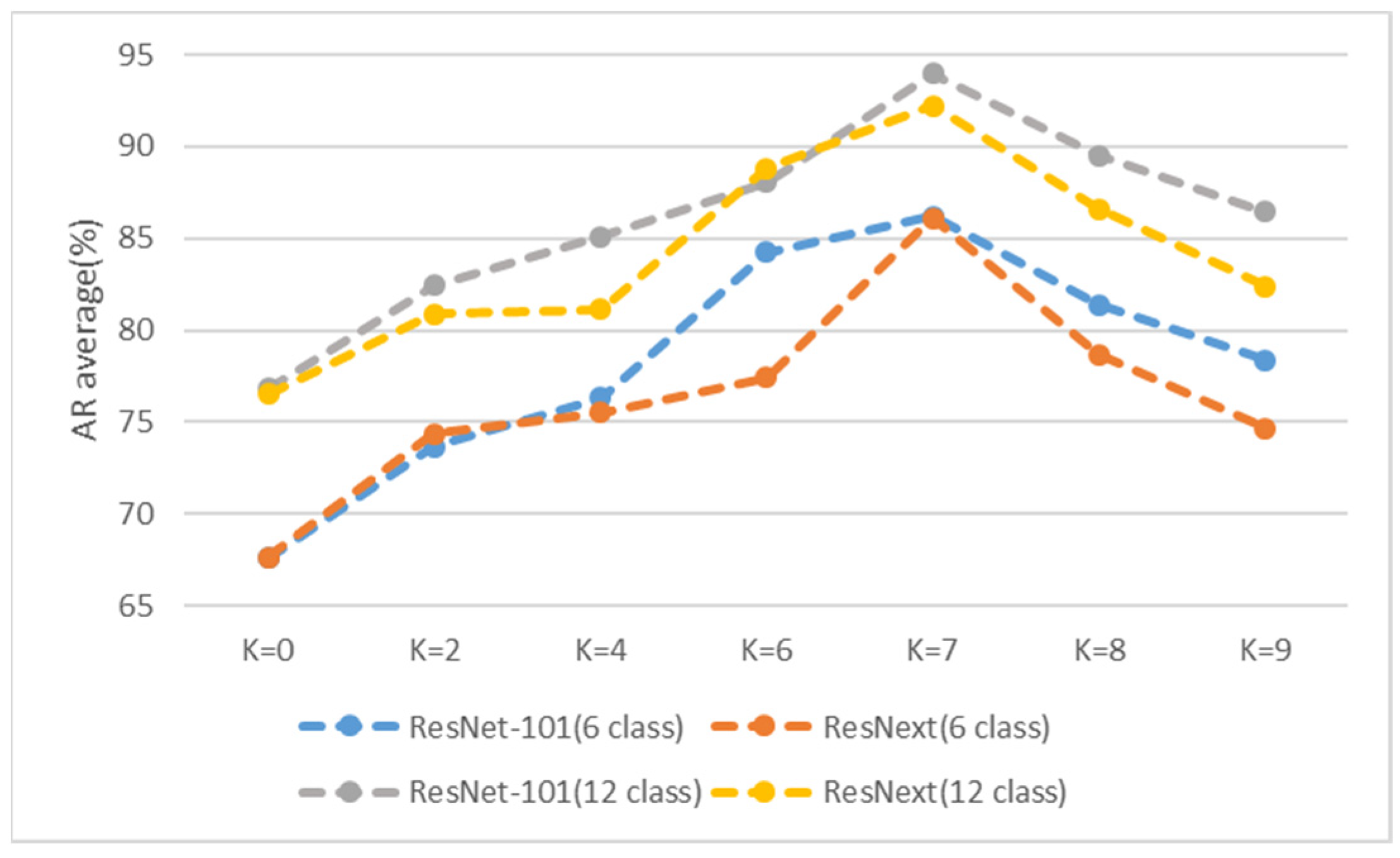
3.4. Hybrid Dataset Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xiao, Q.; Liu, B.; Li, Z.; Ni, W.; Yang, Z.; Li, L. Progressive data augmentation method for remote sensing ship image classification based on imaging simulation system and neural style transfer. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 9176–9186. [Google Scholar] [CrossRef]
- Dumoulin, V.; Shlens, J.; Kudlur, M. A Learned Representation for Artistic Style. arXiv 2016, arXiv:1610.07629. [Google Scholar] [CrossRef]
- Ulyanov, D.; Vedaldi, A.; Lempitsky, V. Improved texture networks: Maximizing quality and diversity in feed-forward styliza-tion and texture synthesis. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6924–6932. [Google Scholar]
- Ye, W.; Chen, Y.; Liu, Y.; Liu, C.; Zhou, H. Multi-style transfer and fusion of image’s regions based on attention mechanism and instance segmentation. Signal Process. Image Commun. A Publ. Eur. Assoc. Signal Process. 2023, 110, 116871. [Google Scholar] [CrossRef]
- Cho, W.; Choi, S.; Park, D.; Shin, I.; Choo, J. Image-to-Image Translation via Group-wise Deep Whitening and Coloring Transformation. arXiv 2018, arXiv:1812.09912. [Google Scholar] [CrossRef]
- Zhao, J.; Lee, F.; Hu, C.; Yu, H.; Chen, Q. LDA-GAN: Lightweight domain-attention GAN for unpaired image-to-image translation. Neurocomputing 2022, 506, 355–368. [Google Scholar] [CrossRef]
- Luan, F.; Paris, S.; Shechtman, E.; Bala, K. Deep Painterly Harmonization. Comput. Graph. Forum 2018, 37, 95–106. [Google Scholar] [CrossRef]
- Ling, J.; Xue, H.; Song, L.; Xie, R.; Gu, X. Region-aware Adaptive Instance Normalization for Image Harmonization. arXiv 2021, arXiv:2106.02853. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, H.; Zhang, J.; Wang, Y.; Lin, Z.; Sunkavalli, K.; Chen, S.; Amirghodsi, S.; Kong, S.; Wang, Z. SSH: A Self-Supervised Framework for Image Harmonization. arXiv 2021, arXiv:2108.06805. [Google Scholar] [CrossRef]
- Guo, Z.; Zheng, H.; Jiang, Y.; Gu, Z.; Zheng, B. Intrinsic Image Harmonization. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 16362–16371. [Google Scholar]
- Guo, Z.; Guo, D.; Zheng, H.; Gu, Z.; Zheng, B.; Dong, J. Image Harmonization with Transformer. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, BC, Canada, 11–17 October 2021; pp. 14850–14859. [Google Scholar]
- Cong, W.; Tao, X.; Niu, L.; Liang, J.; Gao, X.; Sun, Q.; Zhang, L. High-Resolution Image Harmonization via Collaborative Dual Transformations. arXiv 2021, arXiv:2109.06671. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhang, Z.; Lin, Z.; Wu, R.; Chai, Z.; Guo, C.L. Image Harmonization by Matching Regional References. arXiv 2022, arXiv:2204.04715. [Google Scholar] [CrossRef]
- Zhang, Q.; Yuan, Q.; Song, M.; Yu, H.; Zhang, L. Cooperated spectral low-rankness prior and deep spatial prior for hsi unsupervised denoising. IEEE Trans. Image Process. 2022, 31, 6356–6368. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Zheng, Y.; Yuan, Q.; Song, M.; Yu, H.; Xiao, Y. Hyperspectral image denoising: From model-driven, data-driven, to model-data-driven. IEEE Trans. Neural Netw. Learn. Syst. 2023; 1–21, in press. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.-Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired image-to-image translation using cycle-consistent adversarial networks. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2223–2232. [Google Scholar] [CrossRef]
- Ulyanov, D.; Vedaldi, A.; Lempitsky, V. Instance Normalization: The Missing Ingredient for Fast Stylization. arXiv 2016, arXiv:1607.08022. [Google Scholar] [CrossRef]
- Cong, W.; Zhang, J.; Niu, L.; Ling, Z.; Li, W.; Zhang, L. Image Harmonization Dataset iHarmony4: HCOCO, HAdobe5k, HFlickr, and Hday2night. arXiv 2019, arXiv:1908.10526. [Google Scholar]
- Di, Y.; Jiang, Z.; Zhang, H. A Public Dataset for Fine-Grained Ship Classification in Optical Remote Sensing Images. Remote Sens. 2021, 13, 747. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Xie, S.; Girshick, R.; Dollár, P.; Tu, Z.; He, K. Aggregated Residual Transformations for Deep Neural Networks; IEEE: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar] [CrossRef]
- Han, D.; Kim, J.; Kim, J. Deep Pyramidal Residual Networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Devries, T.; Taylor, G.W. Improved Regularization of Convolutional Neural Networks with Cutout. arXiv 2017, arXiv:1708.04552. [Google Scholar] [CrossRef]
- Ma, N.; Zhang, X.; Zheng, H.T.; Sun, J. Shufflenet v2: Practical guidelines for efficient cnn architecture design. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 116–131. [Google Scholar]
- Tan, M.; Le, Q.V. EfficientNetV2: Smaller Models and Faster Training. arXiv 2021, arXiv:2104.00298. [Google Scholar] [CrossRef]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin-Transformer: Hierarchical Vision Transformer using Shifted Windows. arXiv 2021, arXiv:2103.14030. [Google Scholar] [CrossRef]
- Xia, G.S.; Bai, X.; Ding, J.; Zhu, Z.; Belongie, S.; Luo, J.; Datcu, M.; Pelillo, M.; Zhang, L. DOTA: A Large-scale Dataset for Object Detection in Aerial Images. arXiv 2017, arXiv:1711.10398. [Google Scholar] [CrossRef]
- Cheng, G.; Han, J.; Zhou, P.; Guo, L. Multi-class geospatial object detection and geographic image classification based on collection of part detectors. ISPRS J. Photogramm. Remote Sens. 2014, 98, 119–132. [Google Scholar] [CrossRef]
- Di, Y.; Jiang, Z.; Zhang, H.; Meng, G. A public dataset for ship classification in remote sensing images. In Proceedings of the Image and Signal Processing for Remote Sensing XXV, Strasbourg, France, 9–11 September 2019; SPIE Remote Sensing. 2019; Volume 11155, pp. 515–521. [Google Scholar]
- Park, T.; Efros, A.A.; Zhang, R.; Zhu, J.Y. Contrastive learning for unpaired image-to-image translation. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part IX 16. Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 319–345. [Google Scholar]
- Tasar, O.; Happy, S.L.; Tarabalka, Y.; Alliez, P. SEMI2I: Semantically Consistent Image-to-Image Translation for Domain Adaptation of Remote Sensing Data. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ship Category | Detailed Name | Inclusion of Generated Samples | Training Set Size | Test Set Size |
|---|---|---|---|---|
| Aircraft_ carrier | Charles_de_Gaulle_aircraft_carrier | Yes | 34 | 34 |
| Kuznetsov-class_aircraft_carrier | Yes | 34 | 34 | |
| Nimitz-class_aircraft_carrier | No | 388 | 165 | |
| Midway-class aircraft_carrier | No | 146 | 62 | |
| Landing_ship | Whitby_island-class_dock_landing_ship | No | 195 | 83 |
| Destroyer | Arleigh_Burke-class_destroyer | No | 407 | 174 |
| Atago-class_destroyer | Yes | 35 | 35 | |
| Murasame-class_destroyer | No | 407 | 174 | |
| Type_45_destroyer | Yes | 112 | 48 | |
| Zumwalt-class-destroyer | Yes | 25 | 25 | |
| Combat_ship | Independence-class_combat_ship | No | 148 | 62 |
| Freedom-class_combat_ship | Yes | 123 | 53 |
| Classification AR | Baseline | SIG | +BFTA | +BFTA +FFTA | +BFTA +FFTA +HA | BFTA Gain | FFTA Gain | HA Gain | |
|---|---|---|---|---|---|---|---|---|---|
| ResNet | 68.60 | 76.98 | 79.01 | 82.82 | 85.97 | 2.03 | 3.81 | 3.15 | |
| ResNext | 74.64 | 79.66 | 76.34 | 82.09 | 85.55 | −3.32 | 5.75 | 3.46 | |
| Pyramid | 76.57 | 78.47 | 81.64 | 85.03 | 87.48 | 3.17 | 3.39 | 2.45 | |
| EffiN-v2 | 83.68 | 86.16 | 87.21 | 88.87 | 91.68 | 1.05 | 1.66 | 2.81 | |
| Swin-T | 87.32 | 88.14 | 87.36 | 91.49 | 94.88 | −0.78 | 4.13 | 3.39 | |
| ResNet | 79.44 | 84.73 | 86.98 | 89.1 | 92.04 | 2.25 | 2.12 | 2.94 | |
| ResNext | 83.95 | 84.91 | 85.57 | 89.05 | 91.28 | 0.66 | 3.48 | 2.23 | |
| Pyramid | 84.48 | 85.33 | 87.17 | 89.26 | 92.39 | 1.84 | 2.09 | 3.13 | |
| EffiN-v2 | 89.10 | 90.56 | 90.71 | 92.3 | 94.81 | 0.15 | 1.59 | 2.51 | |
| Swin-T | 91.53 | 92.99 | 92.22 | 94.49 | 97.11 | −0.77 | 2.27 | 2.62 | |
| AR (%) | RN-110 | ResNext | DenseNet | PyramidNet | WRN | ShuffleNet-v2 | EfficientNet-v2 | Swin-T |
|---|---|---|---|---|---|---|---|---|
| 86.19 | 86.17 | 83.48 | 87.32 | 92.65 | 90.51 | 93.03 | 95.13 | |
| 92.01 | 92.25 | 87.96 | 93.05 | 95.87 | 84.91 | 95.97 | 97.51 |
| Ship Categories | AR (%) |
|---|---|
| Charles_de_Gaulle_aircraft_carrier | 97.12 |
| Kuznetsov-class_aircraft_carrier | 100.00 |
| Atago-class_destroyer | 93.53 |
| Type_45_destroyer | 75.06 |
| Zumwalt-class-destroyer | 96.21 |
| Freedom-class_combat_ship | 97.14 |
| Nimitz-class_aircraft_carrier | 99.87 |
| Midway-class aircraft_carrier | 100.00 |
| Whitby_island-class_dock_landing_ship | 98.75 |
| Arleigh_Burke-class_destroyer | 97.38 |
| Murasame-class_destroyer | 97.83 |
| Independence-class_combat_ship | 98.84 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Zhong, Z.; Wei, X.; Wu, X.; Li, Y. Remote Sensing Image Harmonization Method for Fine-Grained Ship Classification. Remote Sens. 2024, 16, 2192. https://doi.org/10.3390/rs16122192
Zhang J, Zhong Z, Wei X, Wu X, Li Y. Remote Sensing Image Harmonization Method for Fine-Grained Ship Classification. Remote Sensing. 2024; 16(12):2192. https://doi.org/10.3390/rs16122192
Chicago/Turabian StyleZhang, Jingpu, Ziyan Zhong, Xingzhuo Wei, Xianyun Wu, and Yunsong Li. 2024. "Remote Sensing Image Harmonization Method for Fine-Grained Ship Classification" Remote Sensing 16, no. 12: 2192. https://doi.org/10.3390/rs16122192
APA StyleZhang, J., Zhong, Z., Wei, X., Wu, X., & Li, Y. (2024). Remote Sensing Image Harmonization Method for Fine-Grained Ship Classification. Remote Sensing, 16(12), 2192. https://doi.org/10.3390/rs16122192