

Fast, Nondestructive and Precise Biomass Measurements Are Possible Using Lidar-Based Convex Hull and Voxelization Algorithms

 ,
, 
Abstract
1. Introduction
2. Methods
2.1. Field Sites and Experimental Design
2.2. Biomass Experiments and Data Collection
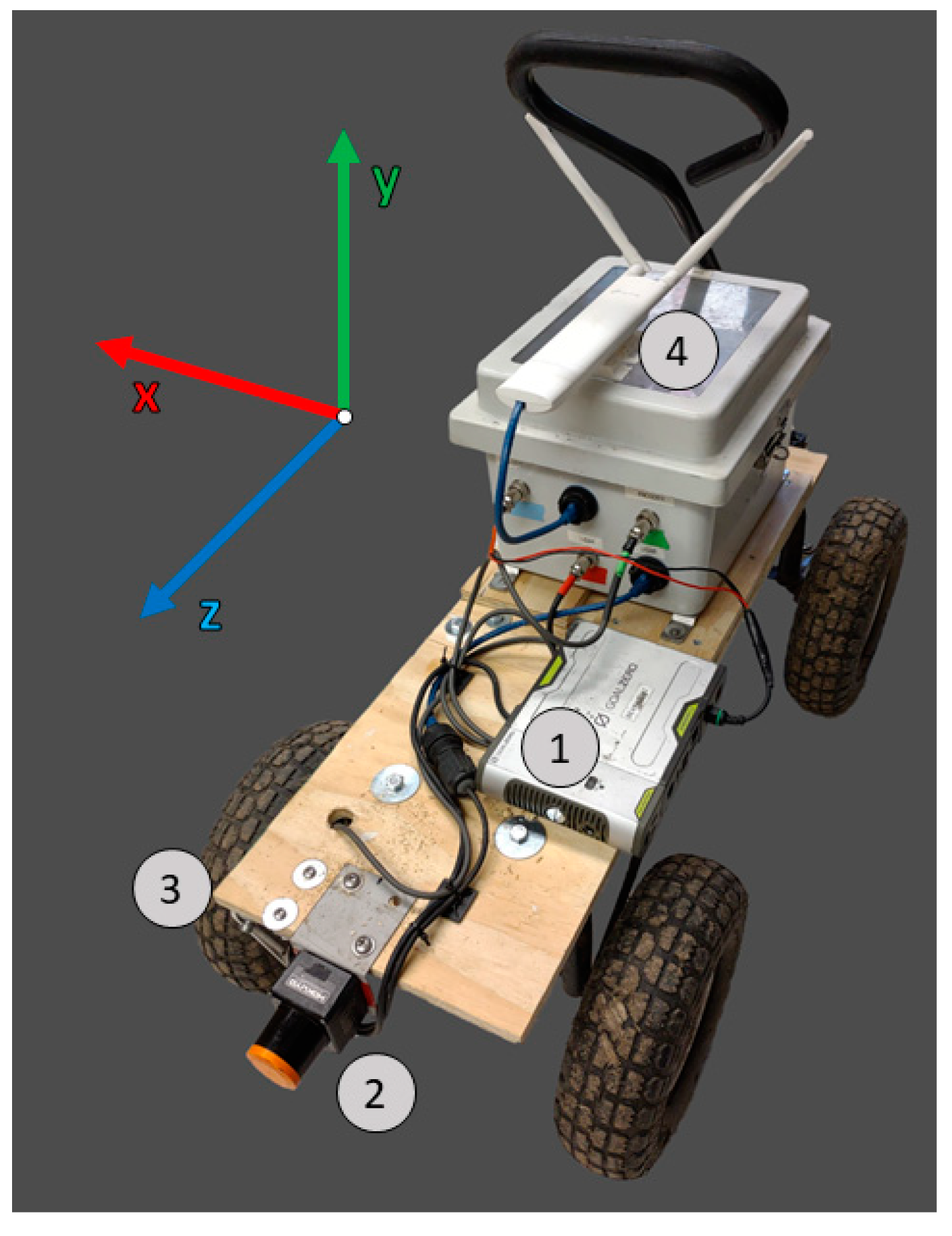
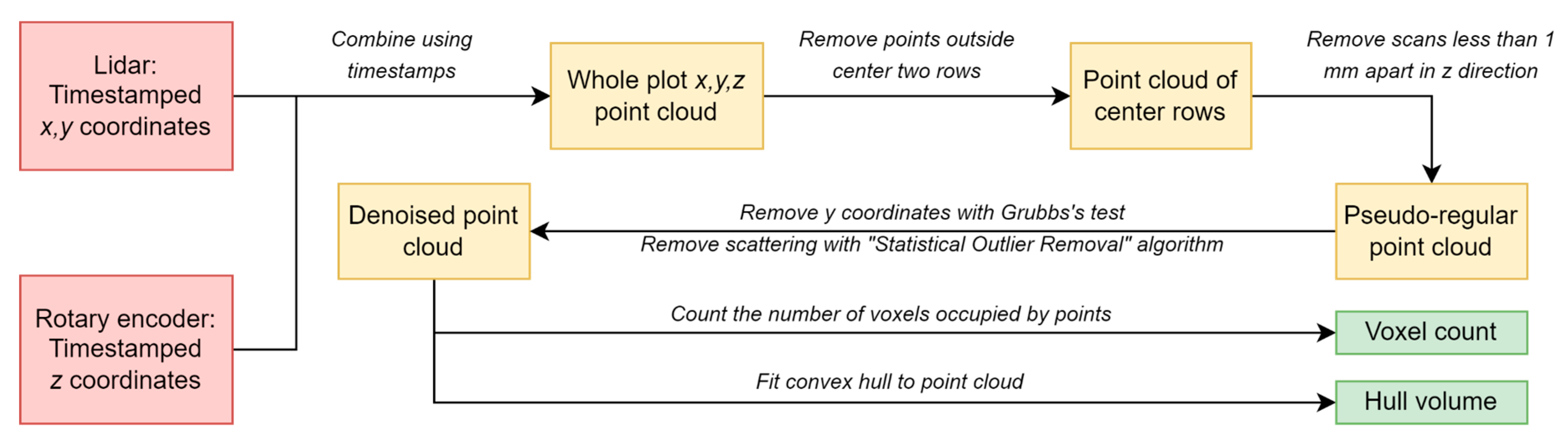
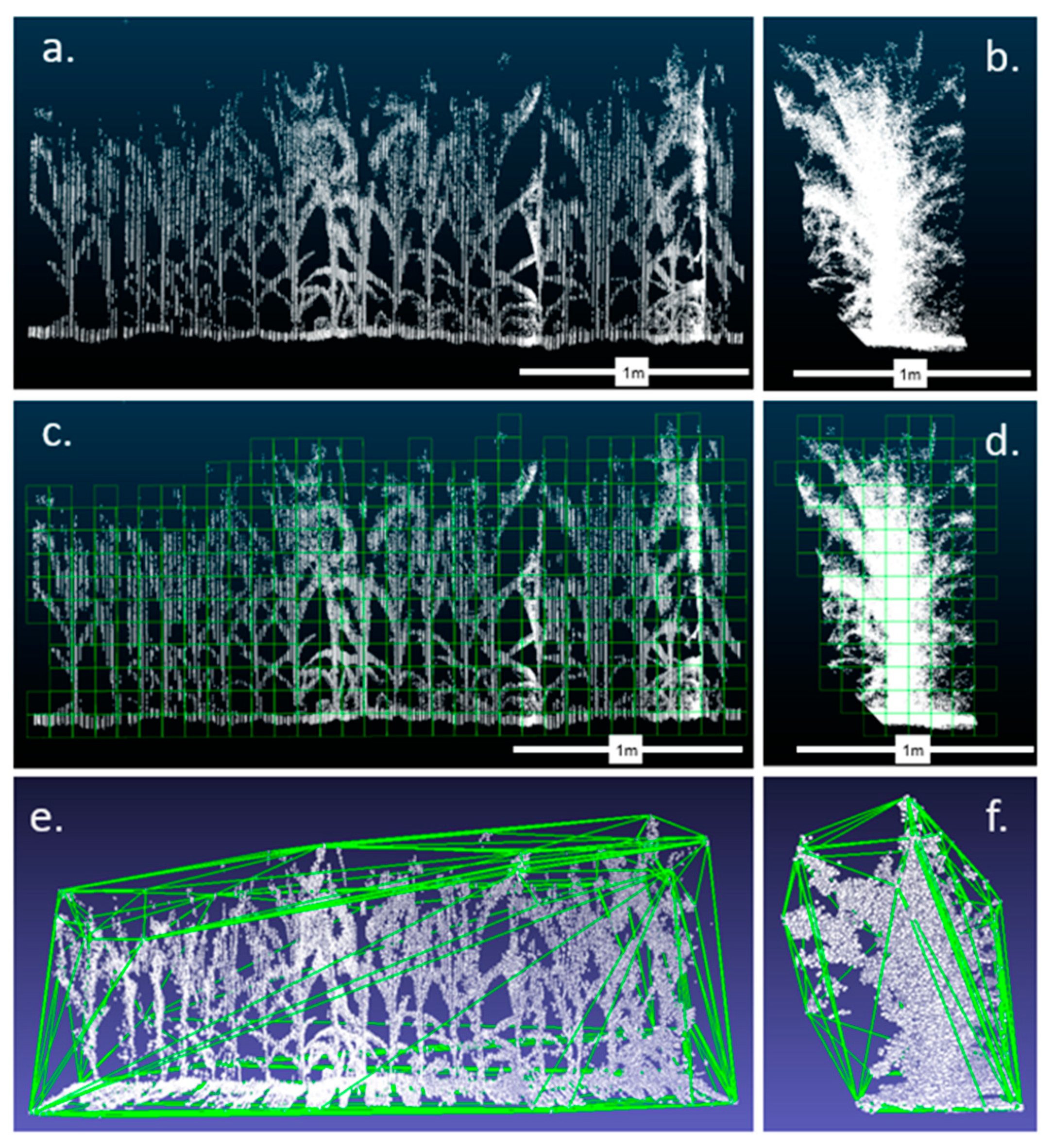
2.3. Lidar Measurements System and Data Processing
2.4. Statistical Analysis of Yield Variability
3. Results
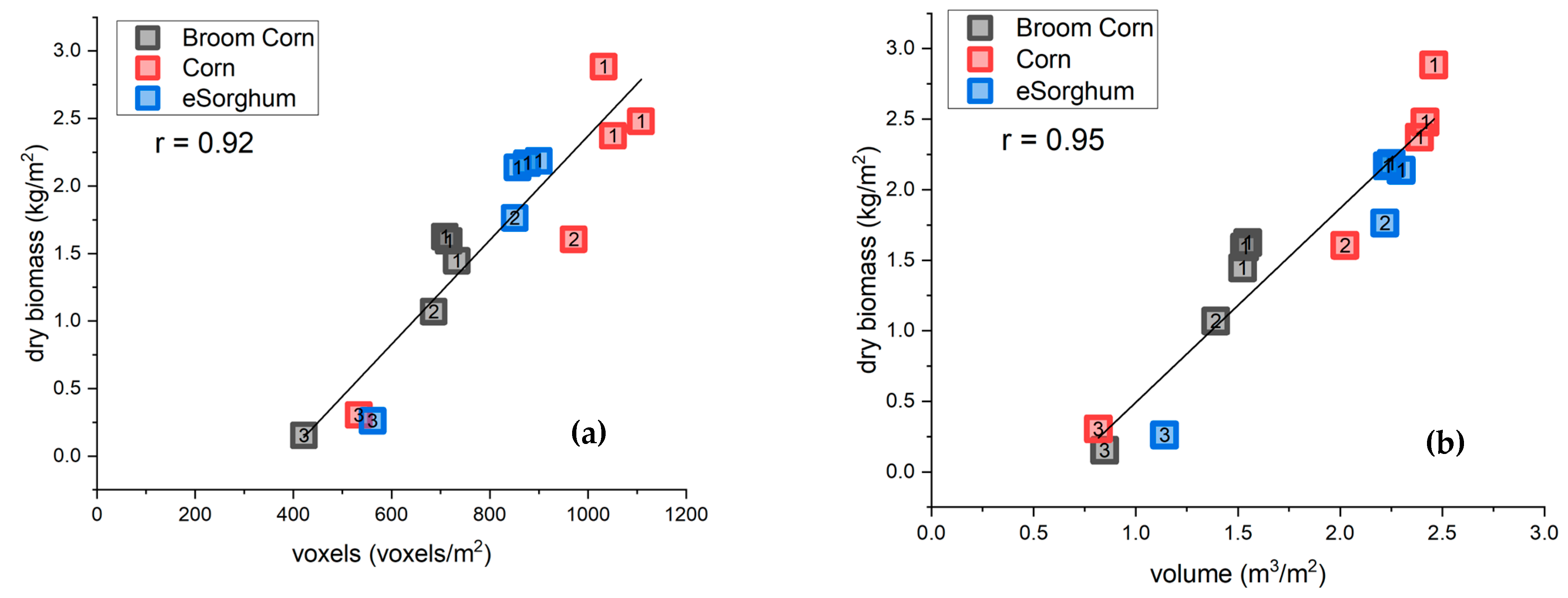
3.1. Convex Hull and Voxel Algorithms of Biomass Correlated Well with Hand-Harvested Biomass from the Staggered-Planting Experiment
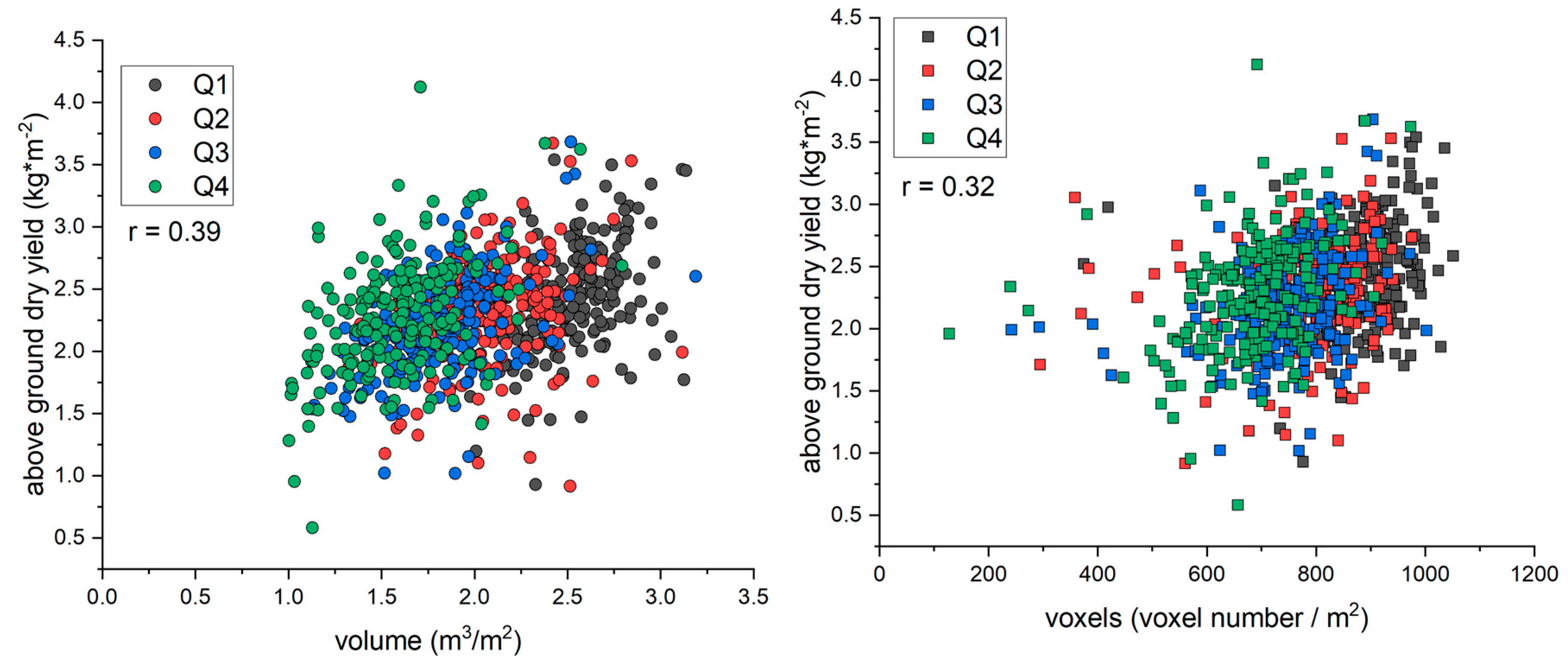
3.2. Substantial Variation of Automated Harvester Biomass Measurements Led to Poor Correlations with Digital Biomass in the Sorghum Breeding Trial
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Atefi, A.; Ge, Y.; Pitla, S.; Schnable, J. Robotic Technologies for High-Throughput Plant Phenotyping: Contemporary Reviews and Future Perspectives. Front. Plant Sci. 2021, 12, 611940. [Google Scholar] [CrossRef] [PubMed]
- Herr, A.W.; Adak, A.; Carroll, M.E.; Elango, D.; Kar, S.; Li, C.; Jones, S.E.; Carter, A.H.; Murray, S.C.; Paterson, A.; et al. UAS Imagery for Phenotyping in Cotton, Maize, Soybean, and Wheat Breeding. Crop Sci. 2023, 63, 1722–1749. [Google Scholar] [CrossRef]
- Fu, P.; Montes, C.M.; Siebers, M.H.; Gomez-Casanovas, N.; McGrath, J.M.; Ainsworth, E.A.; Bernacchi, C.J. Advances in Field-Based High-Throughput Photosynthetic Phenotyping. J. Exp. Bot. 2022, 73, 3157–3172. [Google Scholar] [CrossRef] [PubMed]
- Xie, C.; Yang, C. A Review on Plant High-Throughput Phenotyping Traits Using UAV-Based Sensors. Comput. Electron. Agric. 2020, 178, 105731. [Google Scholar] [CrossRef]
- Meacham-Hensold, K.; Fu, P.; Wu, J.; Serbin, S.; Montes, C.M.; Ainsworth, E.; Guan, K.; Dracup, E.; Pederson, T.; Driever, S.; et al. Plot-Level Rapid Screening for Photosynthetic Parameters Using Proximal Hyperspectral Imaging. J. Exp. Bot. 2020, 71, 2312–2328. [Google Scholar] [CrossRef] [PubMed]
- Montes, C.M.; Fox, C.; Sanz-Sáez, Á.; Serbin, S.P.; Kumagai, E.; Krause, M.D.; Xavier, A.; Specht, J.E.; Beavis, W.D.; Bernacchi, C.J.; et al. High-Throughput Characterization, Correlation, and Mapping of Leaf Photosynthetic and Functional Traits in the Soybean (Glycine Max) Nested Association Mapping Population. Genetics 2022, 221, iyac065. [Google Scholar] [CrossRef] [PubMed]
- Spindel, J.E.; Dahlberg, J.; Colgan, M.; Hollingsworth, J.; Sievert, J.; Staggenborg, S.H.; Hutmacher, R.; Jansson, C.; Vogel, J.P. Association Mapping by Aerial Drone Reveals 213 Genetic Associations for Sorghum Bicolor Biomass Traits under Drought. BMC Genom. 2018, 19, 679. [Google Scholar] [CrossRef] [PubMed]
- Gage, J.L.; Richards, E.; Lepak, N.; Kaczmar, N. In-Field Whole-Plant Maize Architecture Characterized by Subcanopy Rovers and Latent Space Phenotyping. Plant Phenome 2019, 2, 1–11. [Google Scholar] [CrossRef]
- Siebers, M.H.; Edwards, E.J.; Jimenez-Berni, J.A.; Thomas, M.R.; Salim, M.; Walker, R.R. Fast Phenomics in Vineyards: Development of GRover, the Grapevine Rover, and LiDAR for Assessing Grapevine Traits in the Field. Sensors 2018, 18, 2924. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.; Li, C.; Paterson, A.H.; Jiang, Y.; Xu, R.; Robertson, J.S.; Snider, J.L.; Chee, P.W. In-Field High Throughput Phenotyping and Cotton Plant Growth Analysis Using LiDAR. Front. Plant Sci. 2018, 9, 16. [Google Scholar] [CrossRef]
- Rosell Polo, J.R.; Sanz, R.; Llorens, J.; Arnó, J.; Escolà, A.; Ribes-Dasi, M.; Masip, J.; Camp, F.; Gràcia, F.; Solanelles, F.; et al. A Tractor-Mounted Scanning LIDAR for the Non-Destructive Measurement of Vegetative Volume and Surface Area of Tree-Row Plantations: A Comparison with Conventional Destructive Measurements. Biosyst. Eng. 2009, 102, 128–134. [Google Scholar] [CrossRef]
- Bailey, B.N.; Mahaffee, W.F. Rapid Measurement of the Three-Dimensional Distribution of Leaf Orientation and the Leaf Angle Probability Density Function Using Terrestrial LiDAR Scanning. Remote Sens. Environ. 2017, 194, 63–76. [Google Scholar] [CrossRef]
- Su, Y.; Wu, F.; Ao, Z.; Jin, S.; Qin, F.; Liu, B.; Pang, S.; Liu, L.; Guo, Q. Evaluating Maize Phenotype Dynamics under Drought Stress Using Terrestrial Lidar. Plant Methods 2019, 15, 11. [Google Scholar] [CrossRef] [PubMed]
- Vélez, S.; Ariza-Sentís, M.; Valente, J. VineLiDAR: High-Resolution UAV-LiDAR Vineyard Dataset Acquired over Two Years in Northern Spain. Data Brief 2023, 51, 109686. [Google Scholar] [CrossRef] [PubMed]
- Das Choudhury, S.; Maturu, S.; Samal, A.; Stoerger, V.; Awada, T. Leveraging Image Analysis to Compute 3D Plant Phenotypes Based on Voxel-Grid Plant Reconstruction. Front. Plant Sci. 2020, 11, 521431. [Google Scholar] [CrossRef] [PubMed]
- Greaves, H.E.; Vierling, L.A.; Eitel, J.U.H.; Boelman, N.T.; Magney, T.S.; Prager, C.M.; Griffin, K.L. Estimating Aboveground Biomass and Leaf Area of Low-Stature Arctic Shrubs with Terrestrial LiDAR. Remote Sens. Environ. 2015, 164, 26–35. [Google Scholar] [CrossRef]
- Jimenez-Berni, J.A.; Deery, D.M.; Rozas-Larraondo, P.; Condon, A.T.G.; Rebetzke, G.J.; James, R.A.; Bovill, W.D.; Furbank, R.T.; Sirault, X.R.R. High Throughput Determination of Plant Height, Ground Cover, and Above-Ground Biomass in Wheat with LiDAR. Front. Plant Sci. 2018, 9, 237. [Google Scholar] [CrossRef]
- Li, Y.; Hu, R.; Xing, Y.; Pang, Z.; Chen, Z.; Niu, H. Comparison of Three Approaches for Estimating Understory Biomass in Yanshan Mountains. Remote Sens. 2024, 16, 1060. [Google Scholar] [CrossRef]
- Nguyen, V.-T.; Fournier, R.A.; Côté, J.-F.; Pimont, F. Estimation of Vertical Plant Area Density from Single Return Terrestrial Laser Scanning Point Clouds Acquired in Forest Environments. Remote Sens. Environ. 2022, 279, 113115. [Google Scholar] [CrossRef]
- Colaço, A.F.; Schaefer, M.; Bramley, R.G.V. Broadacre Mapping of Wheat Biomass Using Ground-Based LiDAR Technology. Remote Sens. 2021, 13, 3218. [Google Scholar] [CrossRef]
- Rivera, G.; Porras, R.; Florencia, R.; Sánchez-Solís, J.P. LiDAR Applications in Precision Agriculture for Cultivating Crops: A Review of Recent Advances. Comput. Electron. Agric. 2023, 207, 107737. [Google Scholar] [CrossRef]
- Béland, M.; Baldocchi, D.D.; Widlowski, J.-L.; Fournier, R.A.; Verstraete, M.M. On Seeing the Wood from the Leaves and the Role of Voxel Size in Determining Leaf Area Distribution of Forests with Terrestrial LiDAR. Agric. For. Meteorol. 2014, 184, 82–97. [Google Scholar] [CrossRef]
- Preparata, F.P.; Shamos, M.I. Computational Geometry: An Introduction (Texts and Monographs in Computer Science), 1st ed.; Springer: Berlin/Heidelberg, Germany, 1985; ISBN 9780387961316. [Google Scholar]
- Yan, Z.; Liu, R.; Cheng, L.; Zhou, X.; Ruan, X.; Xiao, Y. A Concave Hull Methodology for Calculating the Crown Volume of Individual Trees Based on Vehicle-Borne LiDAR Data. Remote Sens. 2019, 11, 623. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Yue, W.; Shu, S.; Tan, W.; Hu, C.; Huang, Y.; Wu, J.; Liu, H. A Voxel-Based Method for Automated Identification and Morphological Parameters Estimation of Individual Street Trees from Mobile Laser Scanning Data. Remote Sens. 2013, 5, 584–611. [Google Scholar] [CrossRef]
- Korhonen, L.; Vauhkonen, J.; Virolainen, A.; Hovi, A.; Korpela, I. Estimation of Tree Crown Volume from Airborne Lidar Data Using Computational Geometry. Int. J. Remote Sens. 2013, 34, 7236–7248. [Google Scholar] [CrossRef]
- Zhou, L.; Li, X.; Zhang, B.; Xuan, J.; Gong, Y.; Tan, C.; Huang, H.; Du, H. Estimating 3D Green Volume and Aboveground Biomass of Urban Forest Trees by UAV-Lidar. Remote Sens. 2022, 14, 5211. [Google Scholar] [CrossRef]
- Tao, S.; Guo, Q.; Li, L.; Xue, B.; Kelly, M.; Li, W.; Xu, G.; Su, Y. Airborne Lidar-Derived Volume Metrics for Aboveground Biomass Estimation: A Comparative Assessment for Conifer Stands. Agric. For. Meteorol. 2014, 198–199, 24–32. [Google Scholar] [CrossRef]
- Fernández-Sarría, A.; López-Cortés, I.; Estornell, J.; Velázquez-Martí, B.; Salazar, D. Estimating Residual Biomass of Olive Tree Crops Using Terrestrial Laser Scanning. Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 163–170. [Google Scholar] [CrossRef]
- Altman, D.G.; Bland, J.M. Measurement in Medicine: The Analysis of Method Comparison Studies. J. R. Stat. Society. Ser. D Stat. 1983, 32, 307–317. [Google Scholar] [CrossRef]
- Stovall, A.E.L.; Vorster, A.G.; Anderson, R.S.; Evangelista, P.H.; Shugart, H.H. Non-Destructive Aboveground Biomass Estimation of Coniferous Trees Using Terrestrial LiDAR. Remote Sens. Environ. 2017, 200, 31–42. [Google Scholar] [CrossRef]
- Putman, E.B.; Popescu, S.C. Automated Estimation of Standing Dead Tree Volume Using Voxelized Terrestrial Lidar Data. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6484–6503. [Google Scholar] [CrossRef]
- Lin, C.; Hu, F.; Peng, J.; Wang, J.; Zhai, R. Segmentation and Stratification Methods of Field Maize Terrestrial LiDAR Point Cloud. Collect. FAO Agric. 2022, 12, 1450. [Google Scholar] [CrossRef]
- Thapa, S.; Zhu, F.; Walia, H.; Yu, H.; Ge, Y. A Novel LiDAR-Based Instrument for High-Throughput, 3D Measurement of Morphological Traits in Maize and Sorghum. Sensors 2018, 18, 1187. [Google Scholar] [CrossRef] [PubMed]
- Ott, L.R.; Longnecker, M.T. An Introduction to Statistical Methods and Data Analysis, 7th ed.; Cengage Learning: Boston, MA, USA, 2015; ISBN 9781305269477. [Google Scholar]
- Yen, J.; Leber, D.; Pibida, L. Comparing Instruments; National Institute of Standards and Technology: Gaithersburg, MA, USA, 2020.
- McGrath, J.M.; Siebers, M.H.; Fu, P.; Long, S.P.; Bernacchi, C.J. To Have Value, Comparisons of High-Throughput Phenotyping Methods Need Statistical Tests of Bias and Variance. Front. Plant Sci. 2023, 14, 1325221. [Google Scholar] [CrossRef] [PubMed]
- Ferguson, J.N.; Fernandes, S.B.; Monier, B.; Miller, N.D.; Allen, D.; Dmitrieva, A.; Schmuker, P.; Lozano, R.; Valluru, R.; Buckler, E.S.; et al. Machine Learning-Enabled Phenotyping for GWAS and TWAS of WUE Traits in 869 Field-Grown Sorghum Accessions. Plant Physiol. 2021, 187, 1481–1500. [Google Scholar] [CrossRef] [PubMed]
- Institute for Sustainability, Energy, and Environment at the University of Illinois Energy Farm Sorghum Harvest Part Two. Available online: https://www.youtube.com/watch?v=rS9fR-_u-uY (accessed on 15 April 2024).
- Grubbs, F.E. Sample Criteria for Testing Outlying Observations. Ann. Math. Stat. 1950, 21, 27–58. [Google Scholar] [CrossRef]
- de la Iglesia Castro, D. Pyntcloud: Pyntcloud Is a Python Library for Working with 3D Point Clouds; Github: San Francisco, CA, USA, 2023. [Google Scholar]
- de la Iglesia Castro, D. Examples/[Structures] VoxelGrid.ipynb at Master Daavoo/Pyntcloud; Github: San Francisco, CA, USA, 2018. [Google Scholar]
- Feltz, C.J.; Miller, G.E. An Asymptotic Test for the Equality of Coefficients of Variation from K Populations. Stat. Med. 1996, 15, 646–658. [Google Scholar] [CrossRef]
- Goodwin, L.D.; Leech, N.L. Understanding Correlation: Factors That Affect the Size of R. J. Exp. Educ. 2006, 74, 251–266. [Google Scholar] [CrossRef]
- Auat Cheein, F.A.; Guivant, J. SLAM-Based Incremental Convex Hull Processing Approach for Treetop Volume Estimation. Comput. Electron. Agric. 2014, 102, 19–30. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | Convex Hull Volume | Voxel | Hand-Harvested Dry Mass | Hand Harvest/Volume | Hand Harvest/Voxel |
|---|---|---|---|---|---|
| Broom Corn | 0.008 | 0.017 | 0.062 | 7.367 * | 3.598 |
| Energy Sorghum | 0.015 | 0.037 | 0.011 | 0.778 | 0.308 |
| Maize | 0.015 | 0.024 | 0.105 | 6.854 * | 4.258 * |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siebers, M.H.; Fu, P.; Blakely, B.J.; Long, S.P.; Bernacchi, C.J.; McGrath, J.M. Fast, Nondestructive and Precise Biomass Measurements Are Possible Using Lidar-Based Convex Hull and Voxelization Algorithms. Remote Sens. 2024, 16, 2191. https://doi.org/10.3390/rs16122191
Siebers MH, Fu P, Blakely BJ, Long SP, Bernacchi CJ, McGrath JM. Fast, Nondestructive and Precise Biomass Measurements Are Possible Using Lidar-Based Convex Hull and Voxelization Algorithms. Remote Sensing. 2024; 16(12):2191. https://doi.org/10.3390/rs16122191
Chicago/Turabian StyleSiebers, Matthew H., Peng Fu, Bethany J. Blakely, Stephen P. Long, Carl J. Bernacchi, and Justin M. McGrath. 2024. "Fast, Nondestructive and Precise Biomass Measurements Are Possible Using Lidar-Based Convex Hull and Voxelization Algorithms" Remote Sensing 16, no. 12: 2191. https://doi.org/10.3390/rs16122191
APA StyleSiebers, M. H., Fu, P., Blakely, B. J., Long, S. P., Bernacchi, C. J., & McGrath, J. M. (2024). Fast, Nondestructive and Precise Biomass Measurements Are Possible Using Lidar-Based Convex Hull and Voxelization Algorithms. Remote Sensing, 16(12), 2191. https://doi.org/10.3390/rs16122191