
Lake Environmental Data Harvester (LED) for Alpine Lake Monitoring with Autonomous Surface Vehicles (ASVs)

 ,
,  ,
,  ,
,  ,
,  , ,
, ,  and
and
Abstract

1. Introduction
Background, Motivation, and Objectives
2. Methodology-Integrated Environmental Monitoring Systems
3. Design and Implementation
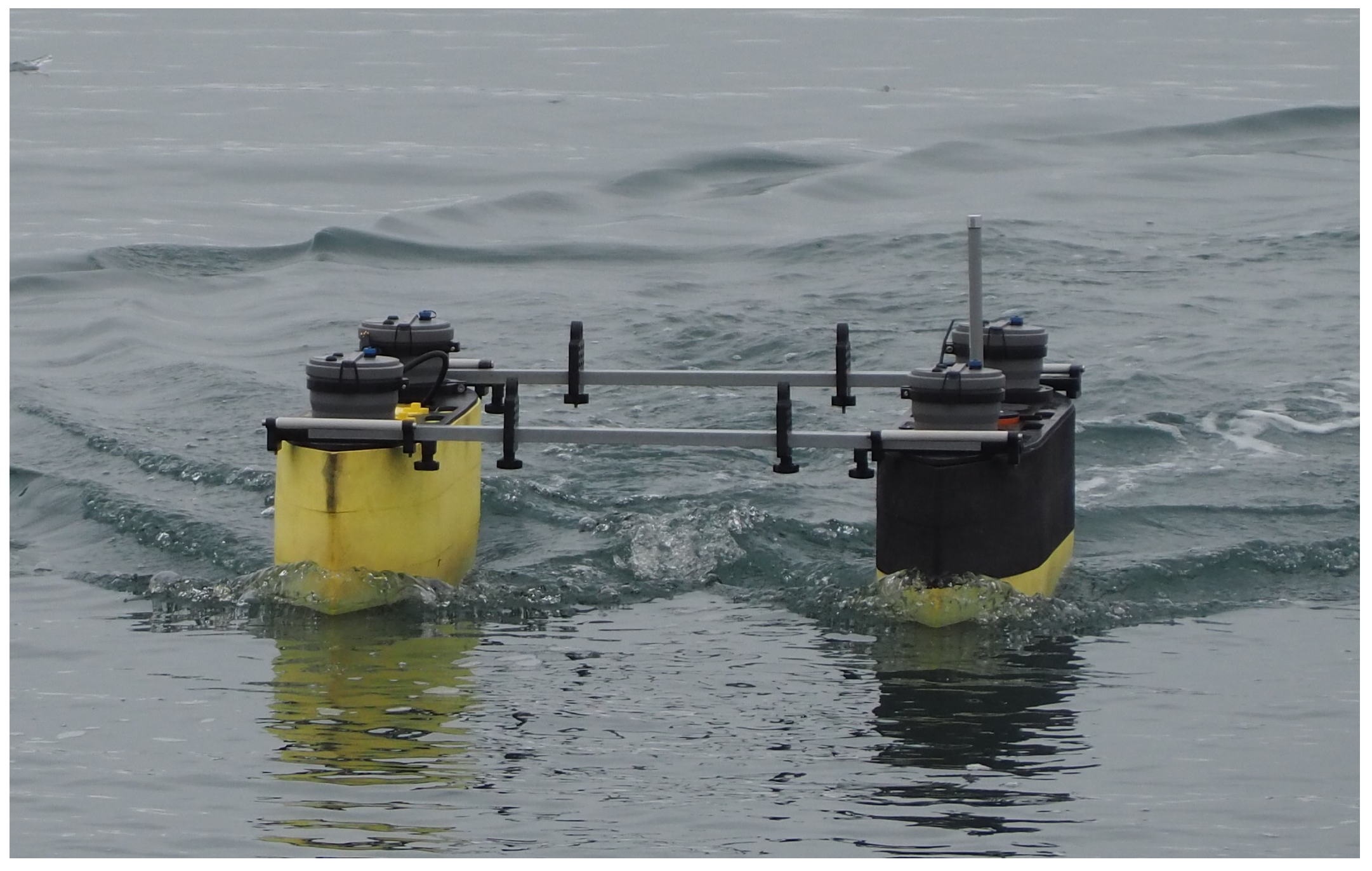
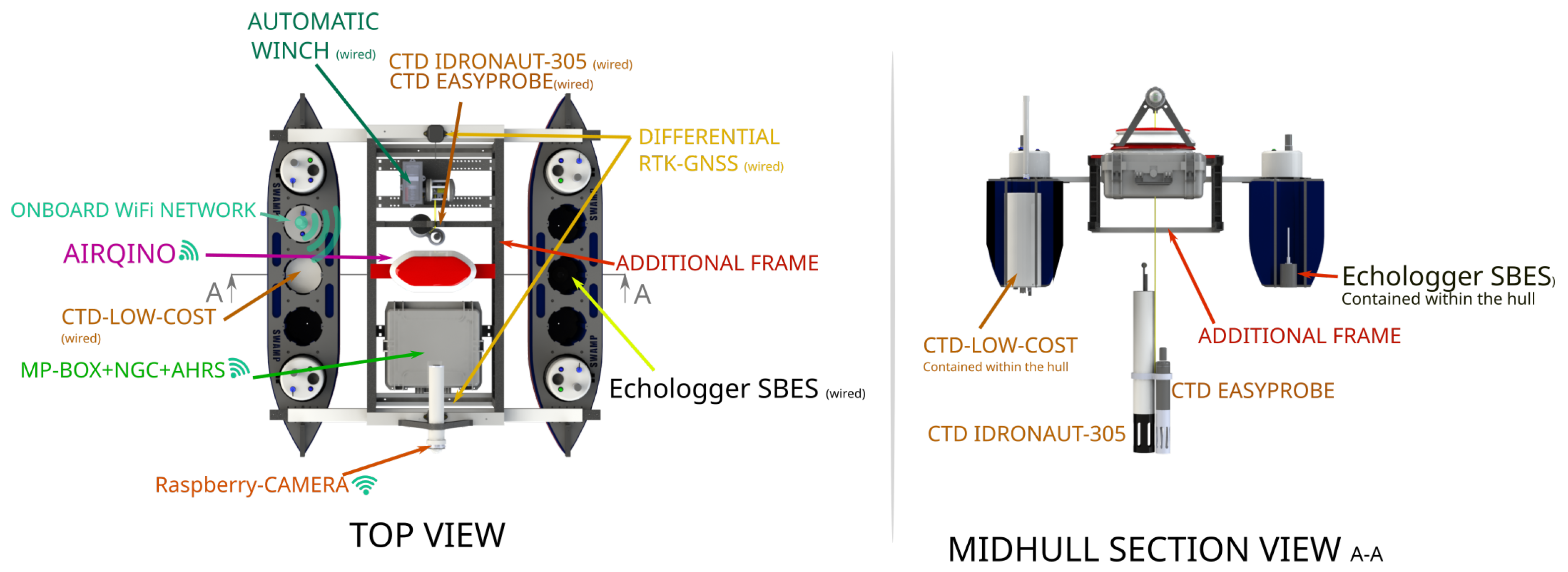
3.1. SWAMP ASV Design
- The Wi-Fi architecture facilitates the rapid installation of heterogeneous sensors, minimizing wiring needs. Most of the sensors are provided with their powering (battery) and dedicated Wi-Fi modules to communicate.
- The flat bottom and soft-hull design [52] allow operation in extremely shallow water, with environmental sensors and sonars contained within the hull to mitigate the risk of damage and loss caused by external impacts.
- Its shallow-water capability makes it suitable for applications in lakes and rivers.
- The mountable nature of SWAMP makes it suitable for transportation even if future reductions in weight and size are foreseen for high-altitude alpine lakes.
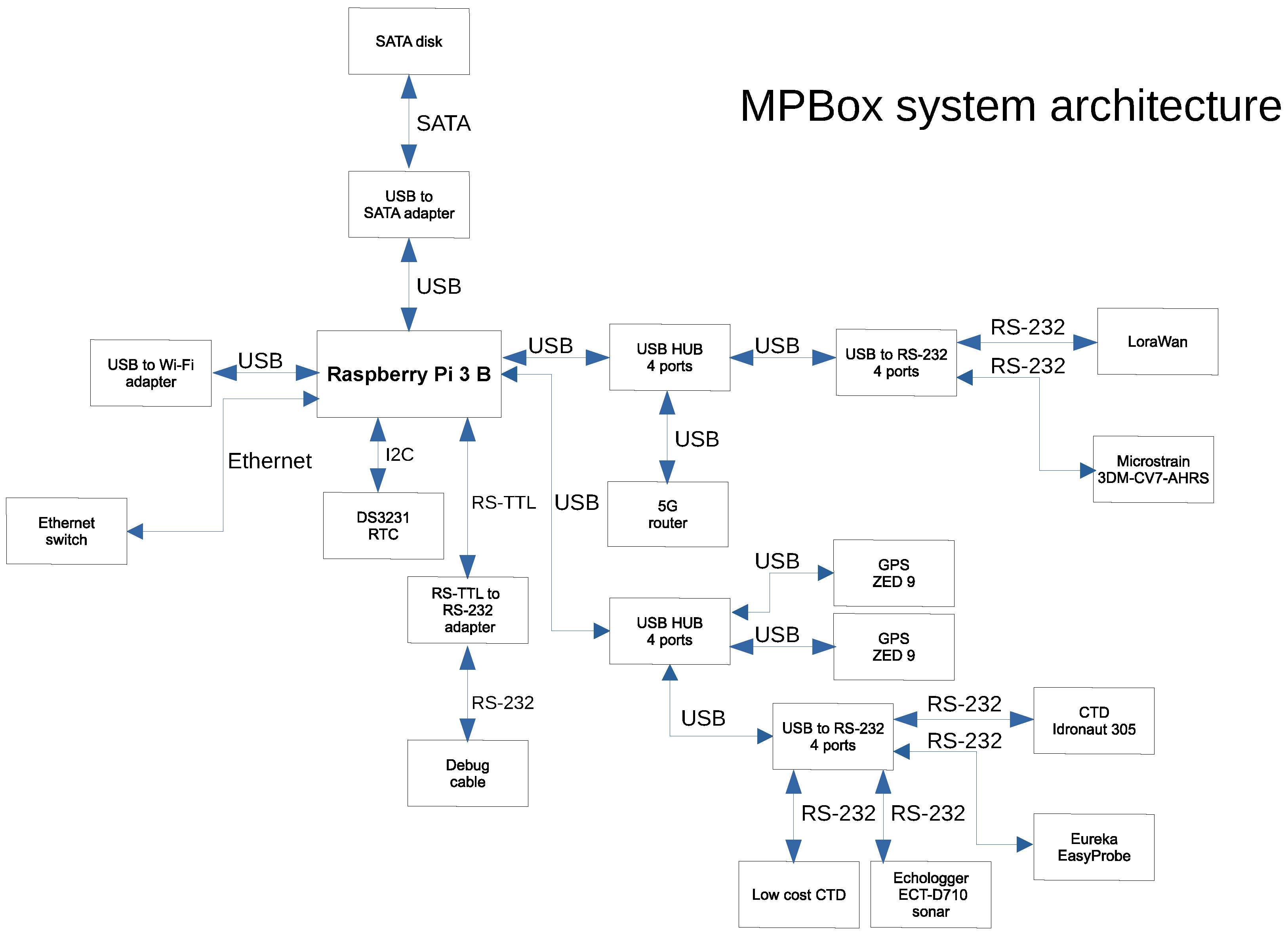
3.2. MPBox: Data Acquisition Control System and Communication Manager
- The PCBs, wiring, and SBC as described above;
- A 24 V battery for powerand various DC-DC converters (+-12 V, 5 V, 3.3 V);
- Connectors for external sensors and tools;
- SSD for data storage;
- A Microstrain AHRS sensor (see Section 3.5);
- RTK2-GNSS boards (see Section 3.5);
- A GSM/UMTS module with a data SIM card for RTK-GNSS corrections and communication;
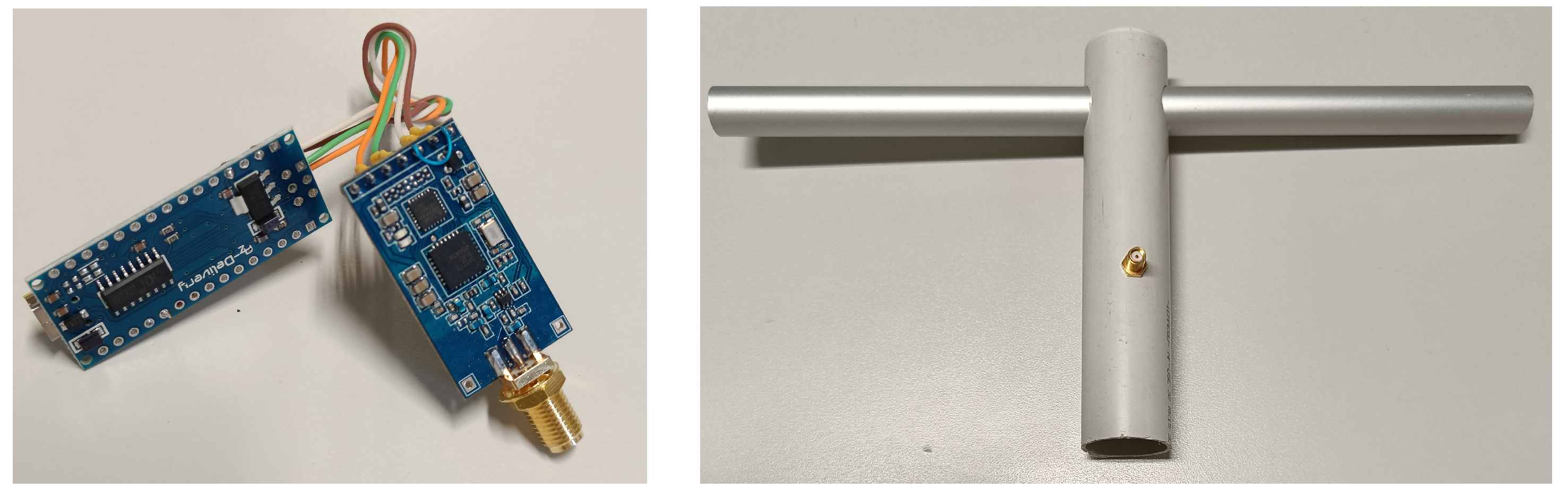
- Sub-GHz (433 MHz) module with Arduino Nano for data interface and transmission (see Section 3.3).
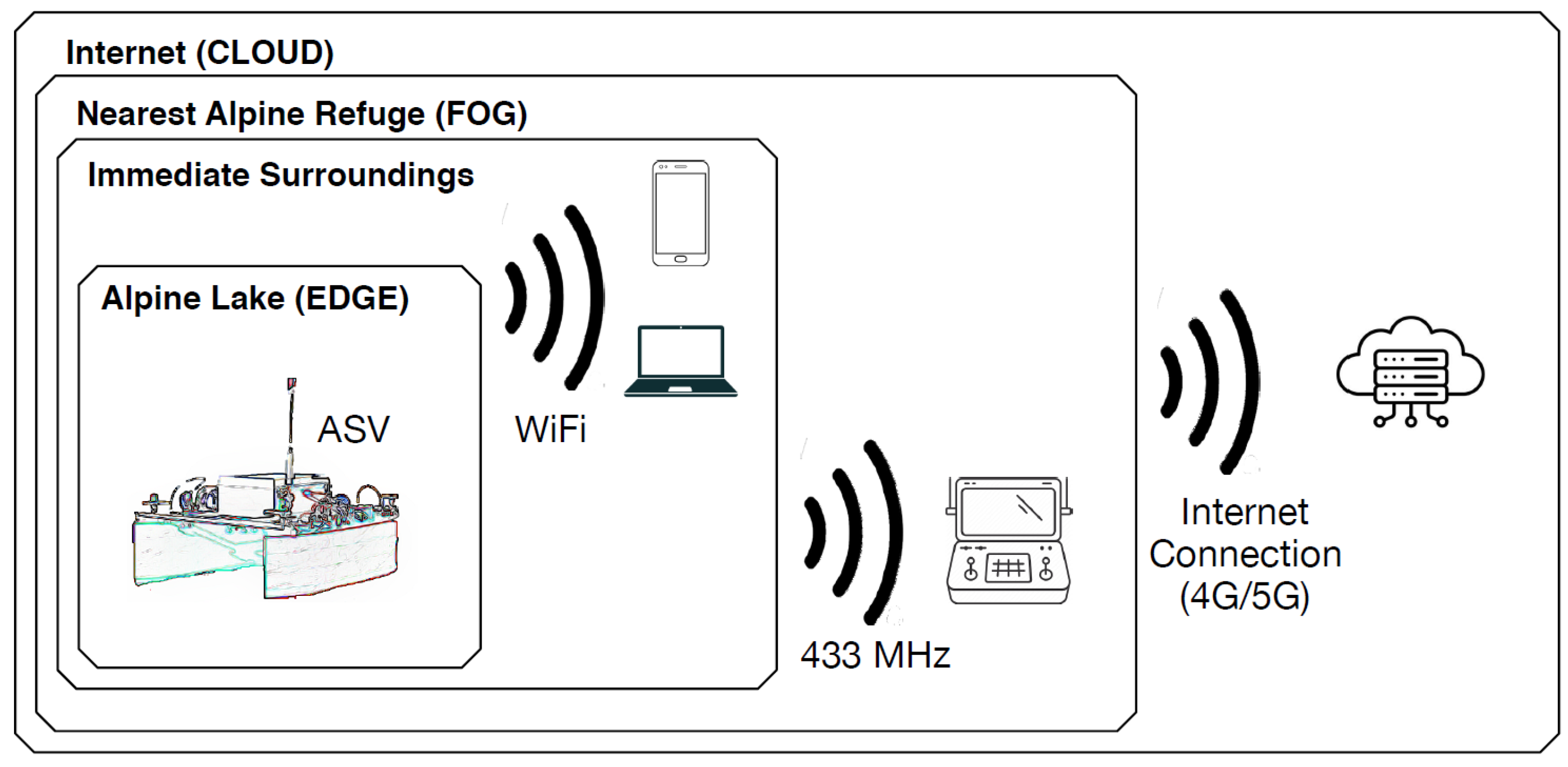
3.3. IoT System Architecture
- Harvest raw data from sensors;
- Process raw data (e.g., structuring data according to standard formats);
- Provide a Wi-Fi local area network (WLAN);
- Publish information through a socket service and a web application in the WLAN;
- Accept commands from the land station and/or web interface;
- Ensure communication through a sub-GHz radio to the closest end-point (in case there are no Internet connections available).
- Publisher: it accepts connections on a TCP socket, providing clients with a JSON object containing current data stored in the shared structure.
- Commands: it accepts connections on a TCP socket: clients may send commands either to the ASV autopilot or to the Data processing thread.
- Telemetry: it connects to a remote server, sending telemetry and sensor data.
- GPS: it connects to a remote server, sending the current position of the ASV.
- Virtual Serial Port: it uses a sub-GHz radio (at 433 MHz) to communicate with a remote end point, providing a serial connection between the ASV and the remote end point.
- SLAM: it uses an RGB camera connected to the Raspberry Pi to estimate the position of the ASV by exploiting computer vision algorithms.
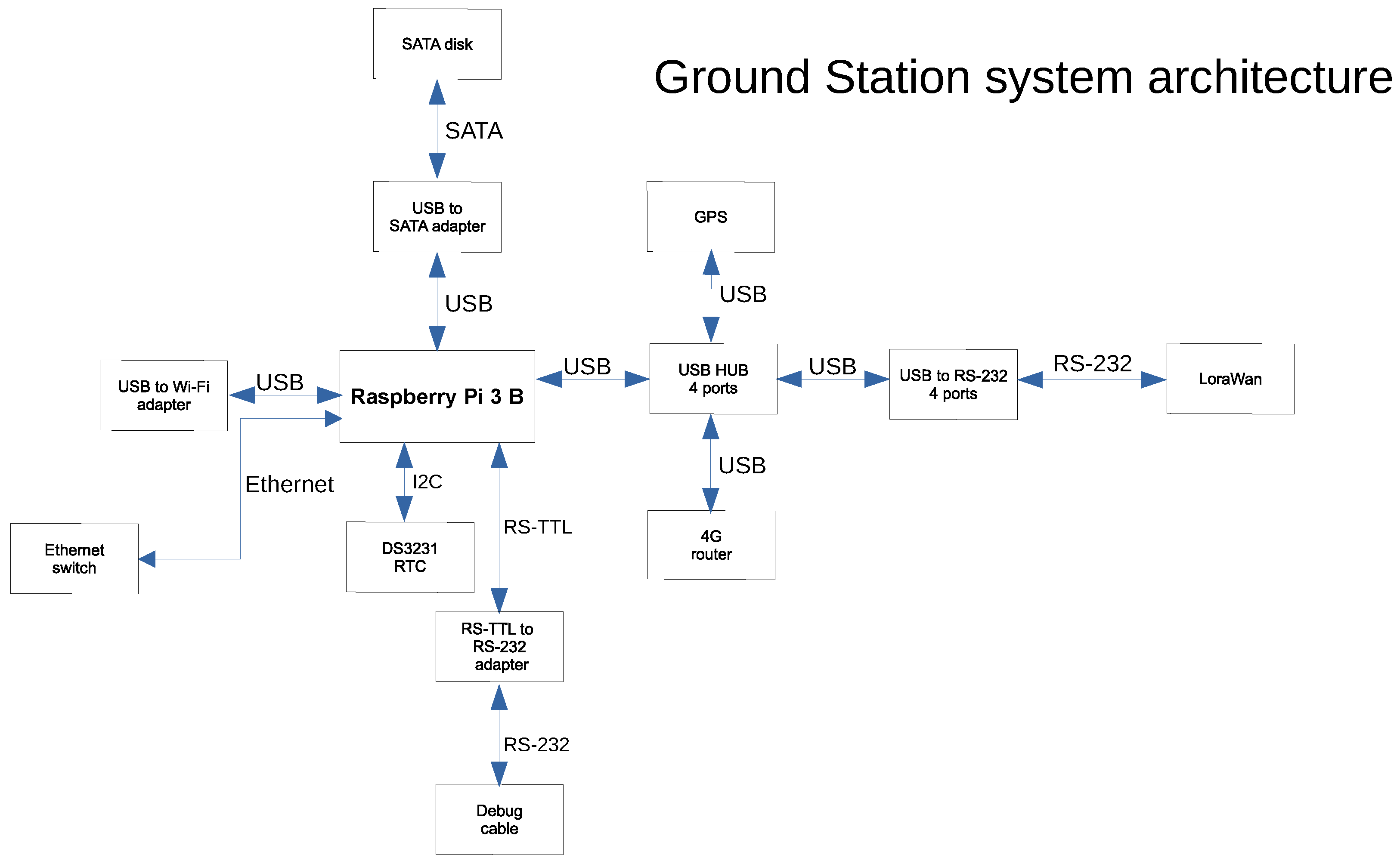
3.4. Ground Station
- The PCBs, wiring and SBC as described above;
- A 24 V battery for powering and various DC-DC converters (+-12 V, 5 V, 3.3 V);
- An SSD for data storage
- Connectors for external sensors and tools
- A sub-GHz (433 MHz) module with Arduino Nano for data interface and transmission enabling long-range data transmission and control functionalities (see Section 3.3);
- Microstrain AHRS sensor (see Section 3.5);
- RTK2-GNSS Board;
- Network Switch (Hub USB).
3.5. Navigation Sensors
3.6. Navigation and SLAM Camera
3.7. Water Quality Sensors
- CTD Idronaut: OCEAN Seven 305 Plus CTD, a high-quality multiparametric probe, measures various parameters for oceanographic applications.
- CTD (+Ph), medium cost: Eureka EasyProbe20 offers good accuracy in measuring water properties, suitable for various applications.
- CTD (+Ph), low cost: Developed by CNR-INM, this low-cost multiparametric probe utilizes ATLAS scientific probes.
3.8. Automatic Winch
3.9. Single-Beam echosounder
3.10. Air Quality Sensors—AirQino
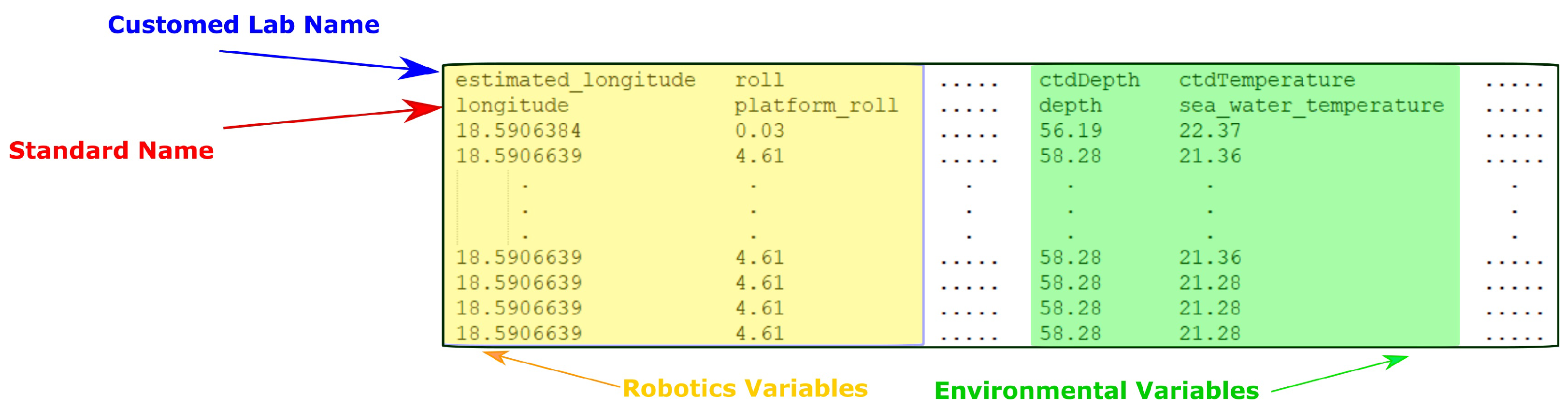
3.11. FAIR Data Management
4. Integration
4.1. Hardware Integration
4.2. Software Integration and Mobile Application Development
5. Outlook
5.1. Future Developments
5.2. Conclusions
- Adaptation of the ASV SWAMP: The adaptation of the ASV SWAMP, originally designed for specific operations, to serve as the primary platform for the LED project signifies a novel approach. This adaptation involves leveraging its modular structure, flat-bottom hull shape, and compact thrusters to enhance controllability and maneuverability, making it suitable for diverse environmental monitoring tasks.
- Versatility for Environmental Monitoring: The integration of lightweight sensors, communication technologies, and navigation components transforms the ASV into a versatile system for environmental monitoring in aquatic environments. This versatility allows the system to collect various types of data efficiently, making it adaptable to different monitoring scenarios.
- MPBox and IoT Infrastructure: The incorporation of the MultiPurpose Box (MPBox) for central hub functions and payload integration within the Wi-Fi architecture of SWAMP, along with an Internet of Things (IoT) infrastructure for data transmission, introduces an advanced level of connectivity and data management within the LED system. This infrastructure enhances data collection, processing, and transmission capabilities, contributing to more comprehensive and efficient monitoring.
- Integrated Environmental and Navigation Payload: The integration of NGC sensors, water quality sensors, an automatic winch, a single-beam echosounder, and air quality sensors into the ASV platform represents a comprehensive scientific and navigation payload. This integration enables the system to gather diverse environmental data simultaneously, enhancing its capabilities.
- Software Integration with “Data Explorer” Application: The development of the “Data Explorer” mobile application for user interaction with the ASV introduces a user-friendly interface for initiating survey missions, accessing real-time data, and sending commands to the ASV. This software integration enhances user accessibility and facilitates seamless operation of the LED system, even in challenging environments.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Adrian, R.; O’Reilly, C.M.; Zagarese, H.; Baines, S.B.; Hessen, D.O.; Keller, W.; Livingstone, D.M.; Sommaruga, R.; Straile, D.; Van Donk, E.; et al. Lakes as sentinels of climate change. Limnol. Oceanogr. 2009, 54, 2283–2297. [Google Scholar] [CrossRef] [PubMed]
- Jeppesen, E.; Meerhoff, M.; Davidson, T.; Trolle, D.; Sondergaar, D.M.; Lauridsen, T.; Beklioğlu, M.; Brucet, S.; Volta, P.; González-Bergonzoni, I.; et al. Climate change impacts on lakes: An integrated ecological perspective based on a multi-faceted approach, with special focus on shallow lakes. J. Limnol. 2014, 73, 88–111. [Google Scholar] [CrossRef]
- Woolway, R.I.; Sharma, S.; Smol, J.P. Lakes in hot water: The impacts of a changing climate on aquatic ecosystems. BioScience 2022, 72, 1050–1061. [Google Scholar] [CrossRef] [PubMed]
- de Jong, C. Challenges for mountain hydrology in the third millennium. Front. Environ. Sci. 2015, 3, 38. [Google Scholar] [CrossRef]
- Viviroli, D.; Archer, D.R.; Buytaert, W.; Fowler, H.J.; Greenwood, G.B.; Hamlet, A.F.; Huang, Y.; Koboltschnig, G.; Litaor, M.; López-Moreno, J.I.; et al. Climate change and mountain water resources: Overview and recommendations for research, management and policy. Hydrol. Earth Syst. Sci. 2011, 15, 471–504. [Google Scholar] [CrossRef]
- Cosgrove, W.J.; Loucks, D.P. Water management: Current and future challenges and research directions. Water Resour. Res. 2015, 51, 4823–4839. [Google Scholar] [CrossRef]
- Carvalho, L.; Mackay, E.B.; Cardoso, A.C.; Baattrup-Pedersen, A.; Birk, S.; Blackstock, K.L.; Borics, G.; Borja, A.; Feld, C.K.; Ferreira, M.T.; et al. Protecting and restoring Europe’s waters: An analysis of the future development needs of the Water Framework Directive. Sci. Total Environ. 2019, 658, 1228–1238. [Google Scholar] [CrossRef] [PubMed]
- Decree, I.L. 152/06. Testo Unico Ambientale. Modificato e Integrato Con il d.lgs. 4/2008 e Con il d.lgs. 128/2010. Gazzetta Ufficiale n. 88 del 14 Aprile 2006. 2006. Available online: https://www.bosettiegatti.eu/info/norme/statali/2006_0152.htm (accessed on 28 February 2024).
- Cannone, N.; Diolaiuti, G.; Guglielmin, M.; Smiraglia, C. Accelerating climate change impacts on alpine glacier forefield ecosystems in the European Alps. Ecol. Appl. 2008, 18, 637–648. [Google Scholar] [CrossRef]
- Colombo, N.; Salerno, F.; Martin, M.; Malandrino, M.; Giardino, M.; Serra, E.; Godone, D.; Said-Pullicino, D.; Fratianni, S.; Paro, L.; et al. Influence of permafrost, rock and ice glaciers on chemistry of high-elevation ponds (NW Italian Alps). Sci. Total Environ. 2019, 685, 886–901. [Google Scholar] [CrossRef]
- Salerno, F.; Gambelli, S.; Viviano, G.; Thakuri, S.; Guyennon, N.; D’Agata, C.; Diolaiuti, G.; Smiraglia, C.; Stefani, F.; Bocchiola, D.; et al. High alpine ponds shift upwards as average temperatures increase: A case study of the Ortles–Cevedale mountain group (Southern Alps, Italy) over the last 50 years. Glob. Planet. Chang. 2014, 120, 81–91. [Google Scholar] [CrossRef]
- Ørbæk, J.; Kallenborn, R.; Tombre, I.; Hegseth, E.; Falk-Petersen, S.; Hoel, A. Integrated aspects of environmental change: Climate change, UV radiation and long range transport of pollutants. Arct. Alp. Ecosyst. People Chang. Environ. 2007, 3–18. [Google Scholar] [CrossRef]
- Slemmons, K.E.; Saros, J.E.; Simon, K. The influence of glacial meltwater on alpine aquatic ecosystems: A review. Environ. Sci. Process. Impacts 2013, 15, 1794–1806. [Google Scholar] [CrossRef]
- Odetti, A.; Altosole, M.; Caccia, M.; Viviani, M.; Bruzzone, G. Wetlands Monitoring: Hints for Innovative Autonomous Surface Vehicles Design. In Technology and Science for the Ships of the Future; IOS Press: Amsterdam, The Netherlands, 2018; Volume 1, pp. 1014–1021. [Google Scholar]
- Odetti, A.; Bruzzone, G.; Altosole, M.; Viviani, M.; Caccia, M. SWAMP, an Autonomous Surface Vehicle expressly designed for extremely shallow waters. Ocean. Eng. 2020, 216, 108205. [Google Scholar] [CrossRef]
- Odetti, A.; Altosole, M.; Bruzzone, G.; Viviani, M.; Caccia, M. A new concept of highly modular ASV for extremely shallow water applications. IFAC-PapersOnLine 2019, 52, 181–186. [Google Scholar] [CrossRef]
- Zaldei, A.; Vagnoli, C.; Di Lonardo, S.; Gioli, B.; Gualtieri, G.; Toscano, P.; Martelli, F.; Matese, A. AirQino, a low-cost air quality mobile platform. In EGU General Assembly Conference Abstracts; European Geosciences Union: Vienna, Austria, 2015; p. 6158. [Google Scholar]
- AirQino. AirQino, February 2024. Available online: https://www.airqino.it/en/ (accessed on 28 February 2024).
- Bruzzone, G.; Odetti, A.; Caccia, M.; Ferretti, R. Monitoring of Sea-Ice-Atmosphere Interfacein the Proximity of Arctic Tidewater Glaciers: The Contribution of Marine Robotics. Remote Sens. 2020, 12, 1707. [Google Scholar] [CrossRef]
- Odetti, A.; Bruzzone, G.; Bibuli, M.; Ferretti, R.; Zereik, E.; Caccia, M. An innovative ASV for the monitoring of anthropogenic pressure on Wetlands. In EGU General Assembly Conference Abstracts; European Geosciences Union: Vienna, Austria, 2020; p. 11920. [Google Scholar]
- Papale, M.; Caruso, G.; Maimone, G.; La Ferla, R.; Lo Giudice, A.; Rappazzo, A.C.; Cosenza, A.; Azzaro, F.; Ferretti, R.; Paranhos, R.; et al. Microbial Community Abundance and Metabolism Close to the Ice-Water Interface of the Blomstrandbreen Glacier (Kongsfjorden, Svalbard): A Sampling Survey Using an Unmanned Autonomous Vehicle. Water 2023, 15, 556. [Google Scholar] [CrossRef]
- Bruzzone, G.; Aracri, S.; Bibuli, M.; Bruzzone, G.; Caccia, M.; Ferretti, R.; Giacopelli, M.; Ivaldi, R.; Motta, C.; Odetti, A.; et al. Multi-Sensor 3D Mapping of Tethys Bay (Ross Sea–Antarctica) with PROTEUS, an Innovative, Highly Reconfigurable and Versatile Unmanned Marine Vehicle; Technical report, Copernicus Meetings; European Geosciences Union: Vienna, Austria, 2023; EGU General Assembly Conference Abstracts. [Google Scholar]
- Ferretti, R.; Aracri, S.; Bibuli, M.; Bruzzone, G.; Bruzzone, G.; Caccia, M.; Motta, C.; Odetti, A. Application of a highly reconfigurable surface robotic platform for freshwater plume characterization and sampling near tidewater glacier front in Arctic critical environment. In Proceedings of the EGU General Assembly 2023, Vienna, Austria, 23–28 April 2023. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, I.W.H.; Chen, Y.; Wang, Y.; Lin, Y. Real-Time Water Quality Monitoring and Estimation in AIoT for Freshwater Biodiversity Conservation. IEEE Internet Things J. 2022, 9, 14366–14374. [Google Scholar] [CrossRef]
- Wong, Y.J.; Nakayama, R.; Shimizu, Y.; Kamiya, A.; Shen, S.; Muhammad Rashid, I.Z.; Nik Sulaiman, N.M. Toward industrial revolution 4.0: Development, validation, and application of 3D-printed IoT-based water quality monitoring system. J. Clean. Prod. 2021, 324, 129230. [Google Scholar] [CrossRef]
- Budiarti, R.P.N.; Tjahjono, A.; Hariadi, M.; Purnomo, M.H. Development of IoT for automated water quality monitoring system. In Proceedings of the 2019 International Conference on Computer Science, Information Technology, and Electrical Engineering (ICOMITEE), Jember, Indonesia, 16–17 October 2019; pp. 211–216. [Google Scholar]
- Ajith, J.B.; Manimegalai, R.; Ilayaraja, V. An IoT based smart water quality monitoring system using cloud. In Proceedings of the 2020 International Conference on Emerging Trends in Information Technology and Engineering (ic-ETITE), Vellore, India, 24–25 February 2020; pp. 1–7. [Google Scholar]
- Amador-Castro, F.; González-López, M.E.; Lopez-Gonzalez, G.; Garcia-Gonzalez, A.; Díaz-Torres, O.; Carbajal-Espinosa, O.; Gradilla-Hernández, M.S. Internet of Things and citizen science as alternative water quality monitoring approaches and the importance of effective water quality communication. J. Environ. Manag. 2024, 352, 119959. [Google Scholar] [CrossRef] [PubMed]
- Sibaja, J.; Terada, A.; Alfaro Solís, R.; Cambronero Luna, M.; Umaña Castro, D.; Porras Ramírez, D.; Sánchez-Gutiérrez, R.; Martínez Arroyo, M.; Godfrey, I.; Martínez Cruz, M. Drone monitoring of volcanic lakes in Costa Rica: A new approach. Drone Syst. Appl. 2023, 11, 1–14. [Google Scholar] [CrossRef]
- Schiaretti, M.; Chen, L.; Negenborn, R.R. Survey on autonomous surface vessels: Part I-a new detailed definition of autonomy levels. In Proceedings of the International Conference on Computational Logistics, Southampton, UK, 18–20 October 2017; Springer: Berlin/Heidelberg, Germany, 2017; pp. 219–233. [Google Scholar]
- Schiaretti, M.; Chen, L.; Negenborn, R.R. Survey on autonomous surface vessels: Part II-categorization of 60 prototypes and future applications. In Proceedings of the International Conference on Computational Logistics, Southampton, UK, 18–20 October 2017; Springer: Berlin/Heidelberg, Germany, 2017; pp. 234–252. [Google Scholar]
- Moud, H.I.; Shojaei, A.; Flood, I. Current and future applications of unmanned surface, underwater, and ground vehicles in construction. In Proceedings of the Construction Research Congress 2018, New Orleans, LA, USA, 2 April 2018; pp. 106–115. [Google Scholar]
- Bolbot, V.; Sandru, A.; Saarniniemi, T.; Puolakka, O.; Kujala, P.; Valdez Banda, O.A. Small Unmanned Surface Vessels; A Review and Critical Analysis of Relations to Safety and Safety Assurance of Larger Autonomous Ships. J. Mar. Sci. Eng. 2023, 11, 2387. [Google Scholar] [CrossRef]
- Arzamendia, M.; Gregor, D.; Reina, D.G.; Toral, S.L. An evolutionary approach to constrained path planning of an autonomous surface vehicle for maximizing the covered area of Ypacarai Lake. Soft Comput. 2019, 23, 1723–1734. [Google Scholar] [CrossRef]
- Sotelo-Torres, F.; Alvarez, L.V.; Roberts, R.C. An Unmanned Surface Vehicle (USV): Development of an Autonomous Boat with a Sensor Integration System for Bathymetric Surveys. Sensors 2023, 23, 4420. [Google Scholar] [CrossRef]
- Lee, K.H.; Ali, S.; Kim, Y.; Lee, K.; Kwon, S.Y.; Kam, J. High resolution mapping of nitrate loads of a reservoir using an uncrewed surface vehicle: Potential opportunities and challenges. Water Resour. Res. 2023, 59, e2023WR034665. [Google Scholar] [CrossRef]
- Rahmat, A.; Hanafi, D. An Unmanned Surface Vehicle (USV) for Water Quality Monitoring Platform. Evol. Electr. Electron. Eng. 2023, 4, 867–873. [Google Scholar]
- Si, H.; Zhang, N.; Liu, Y.; Jing, G.; Ren, Y.; Yang, P. Application and Field Comparison of Water Quality Monitors in Unmanned Surface Vehicle. In Proceedings of the 2023 IEEE 16th International Conference on Electronic Measurement & Instruments (ICEMI), Harbin, China, 9–11 August 2023; pp. 52–56. [Google Scholar] [CrossRef]
- Kapetanović, N.; Kordić, B.; Vasilijević, A.; Nađ, Đ.; Mišković, N. Autonomous Vehicles Mapping Plitvice Lakes National Park, Croatia. Remote Sens. 2020, 12, 3683. [Google Scholar] [CrossRef]
- Pastorino, P.; Clot, L.R.; Bertoli, M.; Pizzul, E.; Bozzetta, E.; Prearo, M.; Rosa Clot, M. Morphometric and bathymetric maps of Alpine lakes using drones. In Proceedings of the International Meeting on the Conservation of High Mountain Lakes, Organizing and Scientific Committee of the Meeting, Ceresole Reale, Italy, 6–8 July 2017; p. 41. [Google Scholar]
- Fernández-Lozano, J.; Andrés-Bercianos, R. On the origin of a remote mountainous natural reserve: Insights from a topo-bathymetry reconstruction of the glacial lake of Truchillas (NW Spain). Quat. Int. 2020, 566, 16–23. [Google Scholar] [CrossRef]
- Kandel, S.; Khadka, N.; Tiwari, D.; Shrestha, D.; Rijal, K. Evolution and bathymetry of glacial lake at the lowest elevation in Nepal Himalaya. J. Mt. Sci. 2023, 20, 141–144. [Google Scholar] [CrossRef]
- Kirchner, N.; Noormets, R.; Kuttenkeuler, J.; Erstorp, E.S.; Holmlund, E.S.; Rosqvist, G.; Holmlund, P.; Wennbom, M.; Karlin, T. High-resolution bathymetric mapping reveals subaqueous glacial landforms in the Arctic alpine lake Tarfala, Sweden. J. Quat. Sci. 2019, 34, 452–462. [Google Scholar] [CrossRef]
- Watanabe, A.; Kuri, M.; Nagatani, K. Field report: Autonomous lake bed depth mapping by a portable semi-submersible USV at Mt. Zao Okama Crater lake. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 214–219. [Google Scholar]
- Jo, W.; Hoashi, Y.; Paredes Aguilar, L.L.; Postigo-Malaga, M.; Garcia-Bravo, J.M.; Min, B.C. A low-cost and small USV platform for water quality monitoring. HardwareX 2019, 6, e00076. [Google Scholar] [CrossRef]
- Viviroli, D.; Dürr, H.H.; Messerli, B.; Meybeck, M.; Weingartner, R. Mountains of the world, water towers for humanity: Typology, mapping, and global significance. Water Resour. Res. 2007, 43, W074470. [Google Scholar] [CrossRef]
- Shugar, D.H.; Burr, A.; Haritashya, U.K.; Kargel, J.S.; Watson, C.S.; Kennedy, M.C.; Bevington, A.R.; Betts, R.A.; Harrison, S.; Strattman, K. Rapid worldwide growth of glacial lakes since 1990. Nat. Clim. Chang. 2020, 10, 939–945. [Google Scholar] [CrossRef]
- Boscaino, V.; Odetti, A.; Marsala, G.; Di Cara, D.; Panzavecchia, N.; Caccia, M.; Tinè, G. A fuel cell powered autonomous surface vehicle: The Eco-SWAMP project. Int. J. Hydrogen Energy 2021, 46, 20732–20749. [Google Scholar] [CrossRef]
- Specht, M.; Szostak, B.; Lewicka, O.; Stateczny, A.; Specht, C. Method for determining of shallow water depths based on data recorded by UAV/USV vehicles and processed using the SVR algorithm. Measurement 2023, 221, 113437. [Google Scholar] [CrossRef]
- Odetti, A.; Altosole, M.; Bruzzone, G.; Caccia, M.; Viviani, M. Design and Construction of a Modular Pump-Jet Thruster for Autonomous Surface Vehicle Operations in Extremely Shallow Water. J. Mar. Sci. Eng. 2019, 7, 222. [Google Scholar] [CrossRef]
- Dinehart, R. Bedform movement recorded by sequential single-beam surveys in tidal rivers. J. Hydrol. 2002, 258, 25–39. [Google Scholar] [CrossRef]
- Odetti, A.; Mastrangeli, M. A shockproof hull made of foam: A useful project for operations on uneven ice. In Proceedings of the 26th International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016; International Society of Offshore and Polar Engineers: Cupertino, CA, USA, 2016. [Google Scholar]
- Karaki, A.A.; Bibuli, M.; Caccia, M.; Ferrando, I.; Gagliolo, S.; Odetti, A.; Sguerso, D. Multi-platforms and multi-sensors integrated survey for the submerged and emerged areas. J. Mar. Sci. Eng. 2022, 10, 753. [Google Scholar] [CrossRef]
- Bibuli, M.; Ferretti, R.; Odetti, A.; Cosso, T. River Survey Evolution by means of Autonomous Surface Vehicles. In Proceedings of the 2021 International Workshop on Metrology for the Sea; Learning to Measure Sea Health Parameters (MetroSea), Reggio Calabria, Italy, 4–6 October 2021; pp. 412–417. [Google Scholar]
- Scagnetto, I.; Brajnik, G.; Gus, P.; Trevisan, F. Oceanus: A context-aware low-cost navigation aid for yacht racing. J. Navig. 2021, 74, 738–749. [Google Scholar] [CrossRef]
- Affanni, A.; Casarsa, L.; Scagnetto, I.; Trevisan, F. Acquisition and integration of differential pressure measurements on sails for boat performances improvement. Acta IMEKO 2023, 12, 1–8. [Google Scholar] [CrossRef]
- Zaidi Farouk, M.I.H.; Jamil, Z.; Abdul Latip, M.F. Towards online surface water quality monitoring technology: A review. Environ. Res. 2023, 238, 117147. [Google Scholar] [CrossRef]
- Randhawa, S.; Sandha, S.S.; Srivastava, B. A multi-sensor process for in-situ monitoring of water pollution in rivers or lakes for high-resolution quantitative and qualitative water quality data. In Proceedings of the 2016 IEEE Intl Conference on Computational Science and Engineering (CSE) and IEEE Intl Conference on Embedded and Ubiquitous Computing (EUC) and 15th Intl Symposium on Distributed Computing and Applications for Business Engineering (DCABES), Paris, France, 24–26 August 2016; pp. 122–129. [Google Scholar]
- Khaleefa, O.; Kamel, A.H. On The Evaluation of Water Quality Index: Case Study of Euphrates River, Iraq. Knowl.-Based Eng. Sci. 2021, 2, 35–43. [Google Scholar] [CrossRef]
- Arseni, M.; Voiculescu, M.; Georgescu, L.P.; Iticescu, C.; Rosu, A. Testing different interpolation methods based on single beam echosounder river surveying. Case study: Siret River. ISPRS Int. J. Geo-Inf. 2019, 8, 507. [Google Scholar] [CrossRef]
- IHO Standards. 2021. Available online: https://iho.int/uploads/user/pubs/standards/s-44/S-44_Edition_6.0.0_EN.pdf (accessed on 28 February 2024).
- Chen, B.; Yang, Y.; Wen, H.; Ruan, H.; Zhou, Z.; Luo, K.; Zhong, F. High-resolution monitoring of beach topography and its change using unmanned aerial vehicle imagery. Ocean. Coast. Manag. 2018, 160, 103–116. [Google Scholar] [CrossRef]
- Ferretti, R.; Bibuli, M.; Bruzzone, G.; Odetti, A.; Aracri, S.; Motta, C.; Caccia, M.; Rovere, M.; Mercorella, A.; Madricardo, F.; et al. Acoustic seafloor mapping using non-standard ASV: Technical challenges and innovative solutions. In Proceedings of the OCEANS 2023-Limerick, Limerick, Ireland, 5–8 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Ferretti, R.; Fumagalli, E.; Caccia, M.; Bruzzone, G. Seabed classification using a single beam echosounder. In Proceedings of the OCEANS 2015-Genova, Genova, Italy, 18–21 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Ferretti, R.; Bibuli, M.; Caccia, M.; Chiarella, D.; Odetti, A.; Ranieri, A.; Zereik, E.; Bruzzone, G. Towards Posidonia Meadows Detection, Mapping and Automatic recognition using Unmanned Marine Vehicles. IFAC-PapersOnLine 2017, 50, 12386–12391. [Google Scholar] [CrossRef]
- Brilli, L.; Berton, A.; Carotenuto, F.; Gioli, B.; Gualtieri, G.; Martelli, F.; Profeti, S.; Trombi, G.; Dibari, C.; Moriondo, M.; et al. Innovative low-cost air quality stations as a supporting means for road traffic regulations in urban areas. IOP Conf. Ser. Earth Environ. Sci. 2020, 489, 012023. [Google Scholar] [CrossRef]
- Carotenuto, F.; Brilli, L.; Gioli, B.; Gualtieri, G.; Martelli, F.; Mazzola, M.; Vagnoli, C.; Viola, A.; Zaldei, A. Design and performance of a low-cost atmospheric composition monitor for deployment in extreme environments. IOP Conf. Ser. Earth Environ. Sci. 2020, 489, 012022. [Google Scholar] [CrossRef]
- Cavaliere, A.; Carotenuto, F.; Di Gennaro, F.; Gioli, B.; Gualtieri, G.; Martelli, F.; Matese, A.; Toscano, P.; Vagnoli, C.; Zaldei, A. Development of low-cost air quality stations for next generation monitoring networks: Calibration and validation of PM2. 5 and PM10 sensors. Sensors 2018, 18, 2843. [Google Scholar] [CrossRef] [PubMed]
- Beddows, P.A.; Mallon, E.K. Cave pearl data logger: A flexible Arduino-based logging platform for long-Term monitoring in harsh environments. Sensors 2018, 18, 530. [Google Scholar] [CrossRef] [PubMed]
- Lockridge, G.; Dzwonkowski, B.; Nelson, R.; Powers, S. Development of a low-cost arduino-based sonde for coastal applications. Sensors 2016, 16, 528. [Google Scholar] [CrossRef]
- Carotenuto, F.; Brilli, L.; Gioli, B.; Gualtieri, G.; Vagnoli, C.; Mazzola, M.; Viola, A.P.; Vitale, V.; Severi, M.; Traversi, R.; et al. Long-term performance assessment of low-cost atmospheric sensors in the arctic environment. Sensors 2020, 20, 1919. [Google Scholar] [CrossRef]
- Pasculli, L.; Piermattei, V.; Madonia, A.; Bruzzone, G.; Caccia, M.; Ferretti, R.; Odetti, A.; Marcelli, M. New cost-effective technologies applied to the study of the glacier melting influence on physical and biological processes in Kongsfjorden area (Svalbard). J. Mar. Sci. Eng. 2020, 8, 593. [Google Scholar] [CrossRef]
- Falkenmark, M.; Wang-Erlandsson, L.; Rockström, J. Understanding of water resilience in the Anthropocene. J. Hydrol. X 2019, 2, 100009. [Google Scholar] [CrossRef]
- Wilkinson, M.D.; Dumontier, M.; Aalbersberg, I.J.; Appleton, G.; Axton, M.; Baak, A.; Blomberg, N.; Boiten, J.W.; da Silva Santos, L.B.; Bourne, P.E.; et al. The FAIR Guiding Principles for scientific data management and stewardship. Sci. Data 2016, 3, 160018. [Google Scholar] [CrossRef]
- Aracri, S.; Ferretti, R.; Motta, C.; Ferreira, F.; Bibuli, M.; de Pascalis, F.; Odetti, A.; Bruzzone, G.; Caccia, M. Open science in marine robotics. In International Conference on Open Data (ICOD 2022): Book of Abstracts; Faculty of Law, University of Zagreb: Zagreb, Croatia, 2023; pp. 96–100. [Google Scholar] [CrossRef]
- UNESCO. UNESCO Recommendation on Open Science; UNESCO: Paris, France, 2023. [Google Scholar]
- Motta, C.; Aracri, S.; Ferretti, R.; Bibuli, M.; Bruzzone, G.; Caccia, M.; Odetti, A.; Ferreira, F.; de Pascalis, F. A framework for FAIR robotic datasets. Sci. Data 2023, 10, 620. [Google Scholar] [CrossRef] [PubMed]
- HydroSHEDS. Available online: https://hydrosheds.cr.usgs.gov (accessed on 28 February 2024).
- National Centers for Environmental Information. Great Lakes Bathymetry. Available online: https://www.ngdc.noaa.gov/mgg/greatlakes/greatlakes.html (accessed on 28 February 2024).
- Copernicus Climate Change Service (C3S). LWL v4.0: Product User Guide and Specification (PUGS). 2023. Available online: https://climate.copernicus.eu/ (accessed on 28 February 2024).
- Climate and Forecast Metadata Conventions. CF Area Type Table. 2023. Available online: http://cfconventions.org/Data/cf-standard-names/docs/area-type-table.html (accessed on 28 February 2024).
- Hersbach, H.; Bell, B.; Berrisford, P.; Biavati, G.; Horányi, A.; Muñoz Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Rozum, I.; et al. ERA5 Hourly Data on Single Levels From 1940 to Present; Copernicus Climate Change Service (C3S); Climate Data Store (CDS): Barcelona, Spain, 2018. [Google Scholar] [CrossRef]
- Gao, H. Collection 6.1 MODIS Global Reservoir Product User’s Guide Version 1.2; Department of Civil & Environmental Engineering, Texas A&M University: College Station, TX, USA, 2021. [Google Scholar]
- European Organization For Nuclear Research; OpenAIRE; Zenodo: Genève, Switzerland, 2013. [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type: | USV/ASV, Catamaran | |
|---|---|---|
| Characteristic: | Unit | Value |
| Overall Length | [mm] | 1230 |
| Overall Breadth | [mm] | 1150 |
| Overall Height | [mm] | 1100 |
| Draft | [mm] | 100 |
| Pump-Jet Propulsion Units | nr | 4 × 15 N—Steerable 360° |
| Operative Speed | [] | 0.5–1.5 |
| Communication | Wi-Fi, LoRa 433 Mhz | |
| Navigation Sensors | nr | 4 × GNSS, IMU |
| Light Weight | [kg] | 35 |
| Nominal Battery Voltage | [V] | 24 |
| Power Consumption | [W] | 70 (@) − 120 (@) − 380 (@) |
| Single Battery (4×) | [Ah] | 13 |
| Endurance | [h] | 16 (@) − 10 (@) − 3 (@) |
| LED Sensors Package | ||
| Main NGC Sensors | D-RTK-GNSS, AHRS, Camera | |
| Winch with rope | [m] | 70 |
| Water Sensors | nr | 2 × CTD + Ph + Redox + DO |
| SBES Echologger | ||
| Weight | [kg] | 9 |
| Nominal Battery Voltage | [V] | 24 |
| Power Consumption | [W] | 35 |
| Battery | [Ah] | 13 |
| Endurance | [h] | 10 |
| Air quality sensors | AirQino Sensors | |
| Weight | [kg] | 1 |
| Nominal Battery Voltage | [V] | 5 |
| Power Consumption | [W] | 1.5 |
| Battery | [Ah] | 10 |
| Endurance | [h] | 32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Odetti, A.; Bruzzone, G.; Ferretti, R.; Aracri, S.; Carotenuto, F.; Vagnoli, C.; Zaldei, A.; Scagnetto, I. Lake Environmental Data Harvester (LED) for Alpine Lake Monitoring with Autonomous Surface Vehicles (ASVs). Remote Sens. 2024, 16, 1998. https://doi.org/10.3390/rs16111998
Odetti A, Bruzzone G, Ferretti R, Aracri S, Carotenuto F, Vagnoli C, Zaldei A, Scagnetto I. Lake Environmental Data Harvester (LED) for Alpine Lake Monitoring with Autonomous Surface Vehicles (ASVs). Remote Sensing. 2024; 16(11):1998. https://doi.org/10.3390/rs16111998
Chicago/Turabian StyleOdetti, Angelo, Gabriele Bruzzone, Roberta Ferretti, Simona Aracri, Federico Carotenuto, Carolina Vagnoli, Alessandro Zaldei, and Ivan Scagnetto. 2024. "Lake Environmental Data Harvester (LED) for Alpine Lake Monitoring with Autonomous Surface Vehicles (ASVs)" Remote Sensing 16, no. 11: 1998. https://doi.org/10.3390/rs16111998
APA StyleOdetti, A., Bruzzone, G., Ferretti, R., Aracri, S., Carotenuto, F., Vagnoli, C., Zaldei, A., & Scagnetto, I. (2024). Lake Environmental Data Harvester (LED) for Alpine Lake Monitoring with Autonomous Surface Vehicles (ASVs). Remote Sensing, 16(11), 1998. https://doi.org/10.3390/rs16111998