1. Introduction
Time is the essential element of modern society and the physical quantity with the highest measurement accuracy. Precise time is vital in various fields such as communications, power grids, transportation, finance, space exploration, and scientific research [
1].
Coordinated Universal Time (UTC) is the international standard time and the basis of timing services in countries worldwide [
2]. UTC is obtained from the average of over 400 atomic clocks maintained in about 80 time laboratories worldwide. Bureau International des Poids et Mesures (BIPM) is responsible for the computation and publishing of the offset between UTC and UTC(k), which is the local representation of UTC. UTC is the ultimate time reference available in deferred time, while time laboratories realize regional UTC(k) time scales in real time [
3]. BIPM recommends that all the UTC(k) realizations be maintained at less than 100 ns of UTC, but a good proportion of laboratories reach the level of some nanoseconds [
4]. Because of its lagging, UTC is not available for direct dissemination. The UTC dissemination service refers to delivering the local UTC(k) time scales to users through various methods. UTC dissemination accuracy is becoming increasingly important with the development of new technologies in fields such as communication, transportation, deep-space exploration, scientific research, and the Internet of Things. In these fields, the demand for UTC dissemination can reach sub-nanoseconds.
The system time of Global Navigation Satellite Systems (GNSSs) achieves traceability to UTC via UTC(k) by precise time transfer links between the GNSS control center and the national time laboratories. GNSS accomplishes the timing service by delivering the time information to users. GPS Time (GPST) is steered to UTC (USNO). The broadcast navigation message contains the UTC offsets between GPST and UTC (USNO). GLONASS Time (GLONASST) is steered to UTC (SU). The broadcast navigation message includes the UTC offsets between GLONASST and UTC (SU). Galileo Time (GST) is steered to a set of European Union UTC(k) realizations. The UTC(k) is steered to UTC by exchanging data with BIPM. The broadcast navigation message of Galileo contains the prediction values of UTC offsets between GST and UTC. BDS Time (BDT) is steered to UTC via UTC (NTSC). The broadcast navigation message of BDS contains the prediction series of UTC offsets between BDT and UTC. The offsets between UTC and UTC (USNO), UTC (SU), and UTC (NTSC) can be obtained from the BIPM circular T. The timing service technology based on GNSS has been widely used due to its wide coverage, low cost, and high precision. It mainly includes standard timing via pseudo-range observation [
5,
6] and precise timing methods via carrier phase observation, such as Precise Point Positioning (PPP) timing [
7].
Carrier phase observation precision is two orders of magnitude higher than pseudo-range observation once the problem of carrier phase observation ambiguity has been correctly solved. Therefore, the carrier phase is the preferred observation for GNSS high-precision applications. The initial application of GNSS carrier phase observations in the field of time–frequency was mainly focused on long-distance time transfer [
8]. With the popularization and promotion of precise GNSS products such as the satellite orbit and clock, the carrier phase observation time transfer technology has developed and gradually matured. The most representative examples are PPP and long baseline single difference technology. The PPP time transfer technology has been widely used in UTC international remote clock comparisons because it is not limited by distance [
3]. Since the International GNSS Service (IGS) [
9] started real-time service, PPP real-time transfer and precise timing based on the real-time precise orbit and clock products became possible [
9,
10]. If the satellite clock products are referenced to the standard time, the single-station PPP precise timing can be achieved [
11,
12,
13]. Yang et al. [
11] proposed the concept of Precise Time Service (PTS) by referencing the real-time clock products to UTC (NTSC) in 2014. In [
12], a prototype system of the PTS PPP timing was built based on the International GNSS Monitoring and Assessment System (iGMAS) tracking stations, analysis centers, and data centers. The timing accuracy can achieve a sub-nanosecond level. Similar research on PPP timing has been carried out in [
14,
15].
On 31 July 2020, the BDS-3 global navigation satellite system officially began to provide services. In addition to providing primary navigation, positioning, and timing (PNT) services, the BDS-3 system also provides services for the satellite-based augmentation system (SBAS), PPP-B2b, short message communication, and international search and rescue [
16]. The BDS-3 PPP service broadcasts PPP-B2b signals to China and surrounding areas through three BDS-3 Geostationary Earth Orbit (GEO) satellites. Users can receive orbit, clock, differential code bias, and other corrections to obtain precise products. After restoring to high-precision satellite orbit and clock products, it can realize real-time high-precision navigation and positioning services. On January 2023, Galileo launched the initial high accuracy service (HAS), a European free-of-charge PPP service with a worldwide coverage. The message provides orbit, clock, and code biases, and will soon provide phase biases, for Galileo E1-E5a-E5b-E6 and GPS L1C/A-L2C signals. The message corrects the Galileo I/NAV and GPS LNAV L1 C/A combinations and is transmitted in the Galileo E6 signal (E6-B data component) and through the Galileo HAS internet data distribution. The HAS solution has an accuracy below 3.6 cm RMS in the horizontal dimension and below 7.6 cm in the vertical dimensions; this is much better than SPP, which has an accuracy below 72 cm in the horizontal dimension and 155.3 cm in the vertical dimensions [
17].
Here, we mainly focus on the BDS-3 PPP-B2b. The nominal horizontal and vertical positioning accuracy of the PPP-B2b service is better than 0.3 m and 0.6 m, respectively, and the convergence time is less than 30 min [
17,
18,
19,
20]. Compared with the traditional PPP, the PPP-B2b service provided with the navigation satellites has some obvious advantages, such as a broader service area, including marine, independence from the internet, and deep integration with the navigation system. Some scholars studied the PPP-B2b signal and the positioning performance of PPP-B2b services. He et al. [
21] analyzed the PPP-B2b signal structure and assessed the results of BDS-3 positioning. Huang et al. [
22] used five stations in China to study the kinematic and static positioning of PPP-B2b. The RMS in E, N, and U directions is 1.5 cm, 0.8 cm, and 1.6 cm for static positioning, and increases to 6.0 cm, 3.6 cm, and 12.2 cm for kinematic positioning. The convergence time is about 0.5 h. Lu et al. [
23] introduced the PPP-B2b signal structure and analyzed the integrity and stability of the PPP-B2b corrections. Studies of the PPP-B2b service performance by Song, Tang, Tao, Xu, et al. [
24,
25,
26,
27] showed that it meets the open service performance standard requirements. Tao et al. [
26] used the PPP-B2b GPS corrections to evaluate the positioning performance. It showed that the GPS results are worse than the BDS-only or the GPS/BDS-combined service because of the low number of State Space Representation (SSR)-matched GPS satellites. There are also some studies based on PPP-B2b for time transfer. Zhang et al. [
28] analyzed the application of the PPP-B2b product to time transfer. The results of zero-baseline common clock difference using the PPP-B2b and GBM products provided by Deutsche GeoForschungsZentrum (GFZ) are within the variation range of 0.1 ns. Notably, the long baseline time comparison difference between results employing the PPP-B2b and the GBM products is within the range of ±0.5 ns. Tang et al. [
29] showed that the GPS/BDS PPP-B2b timing solution has the best frequency stability, while the GPS PPP-B2b solution has the poorest. Ge et al. [
30] showed that GPS PPP-B2b is not recommended. The time transfer based on BDS PPP-B2b is feasible and achieves a 0.30 ns level. Compared to BDS only, the precision of time transfer based on BDS/GPS PPP was not improved significantly. He et al. [
31] used 557 days’ PPP-B2b products to evaluate the time datum stability using all available satellites. The average time synchronization standard deviation (STD) values are from 0.27 ns to 0.74 ns and from 0.27 ns to 0.47 ns for GPS and BDS, respectively. Currently, the research mainly focuses on the performance evaluation of positioning. The time-related studies of PPP-B2b either have a short duration of data or have not been evaluated using time laboratory data.
All correction parameters broadcast by the PPP-B2b signal use BDT as their time reference [
19]. In addition to precise positioning, the PPP-B2b service can be used for accurate BDT dissemination with expected timing accuracy better than 1 ns. It can also be used for UTC dissemination by applying UTC offset information broadcast by navigation messages. However, the UTC offset error accuracy standard of BDS is superior to 20 ns with a confidence level of 95% [
17]. Therefore, it is incapable of sub-nanosecond UTC dissemination for PPP-B2b with UTC offset correction from the navigation message.
This paper proposes a PPP precise timing method based on the PPP-B2b service. The high-precision PPP-B2b solution and UTC(k) were combined to achieve sub-nanosecond level UTC dissemination. Simulated real-time processing experiments were conducted using the measurements of 516 days from nine tracking stations in China and its surrounding areas. The performance of the precise UTC dissemination based on the PPP-B2b service was analyzed and verified.
3. Precise UTC Dissemination Based on PPP-B2b
We propose a high-precision UTC dissemination method based on the PPP-B2b service.
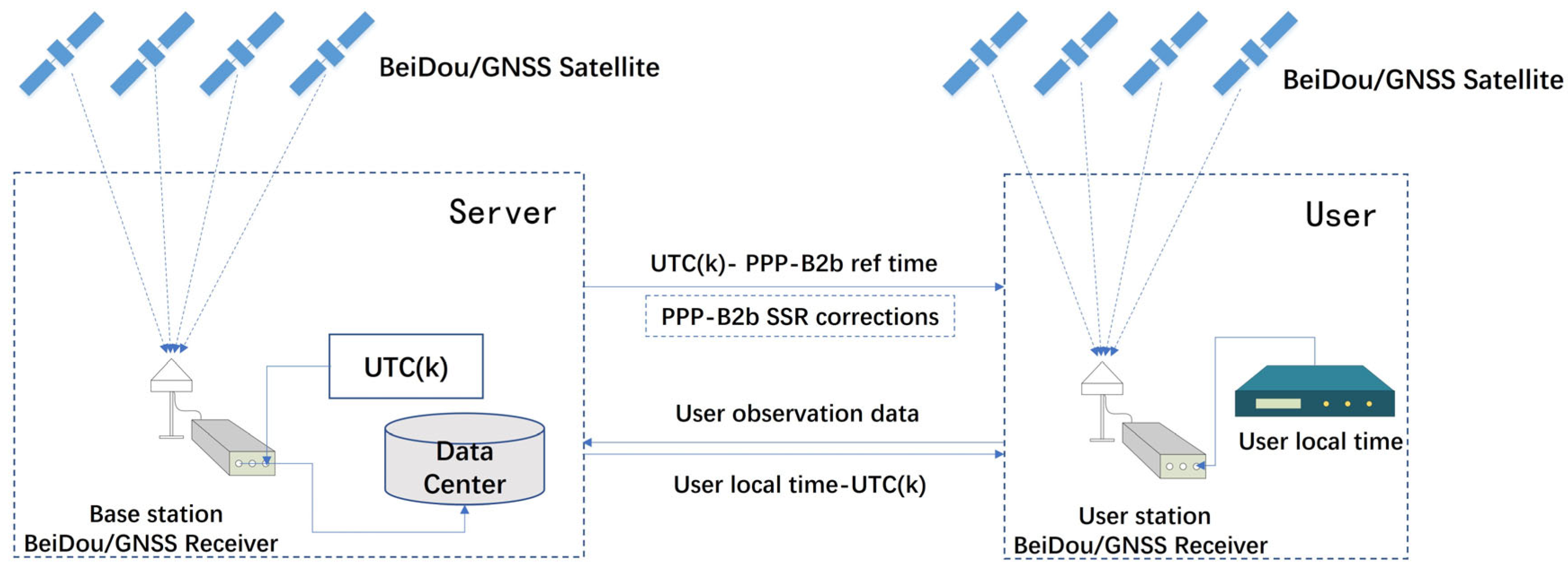
Figure 2 shows the composition of a prototype system for PPP-B2b UTC dissemination, composed of three segments: the server, user, and communication links. The server side includes the BDS/GNSS base station, UTC(k) master clock, data center, and other units. The receiver of the BDS/GNSS base station is connected to the frequency and pulse per second (PPS) signals of UTC(k). Multi-frequency signals from multi-constellation satellites, including BDS-3 PPP-B2b, are tracked by the base station receiver. The data center is responsible for (1) receiving the observations from the base station and the user; (2) using PPP-B2b corrections to perform the PPP calculation; (3) broadcasting the differences between the UTC(k) and the PPP-B2b reference time; (4) forwarding the PPP-B2b service corrections for users not capable of tracking PPP-B2b signal; and (5) monitoring the status of UTC dissemination. The user with a BDS/GNSS receiver is connected to the local time. The server and users communicate through the internet or BDS short messages.
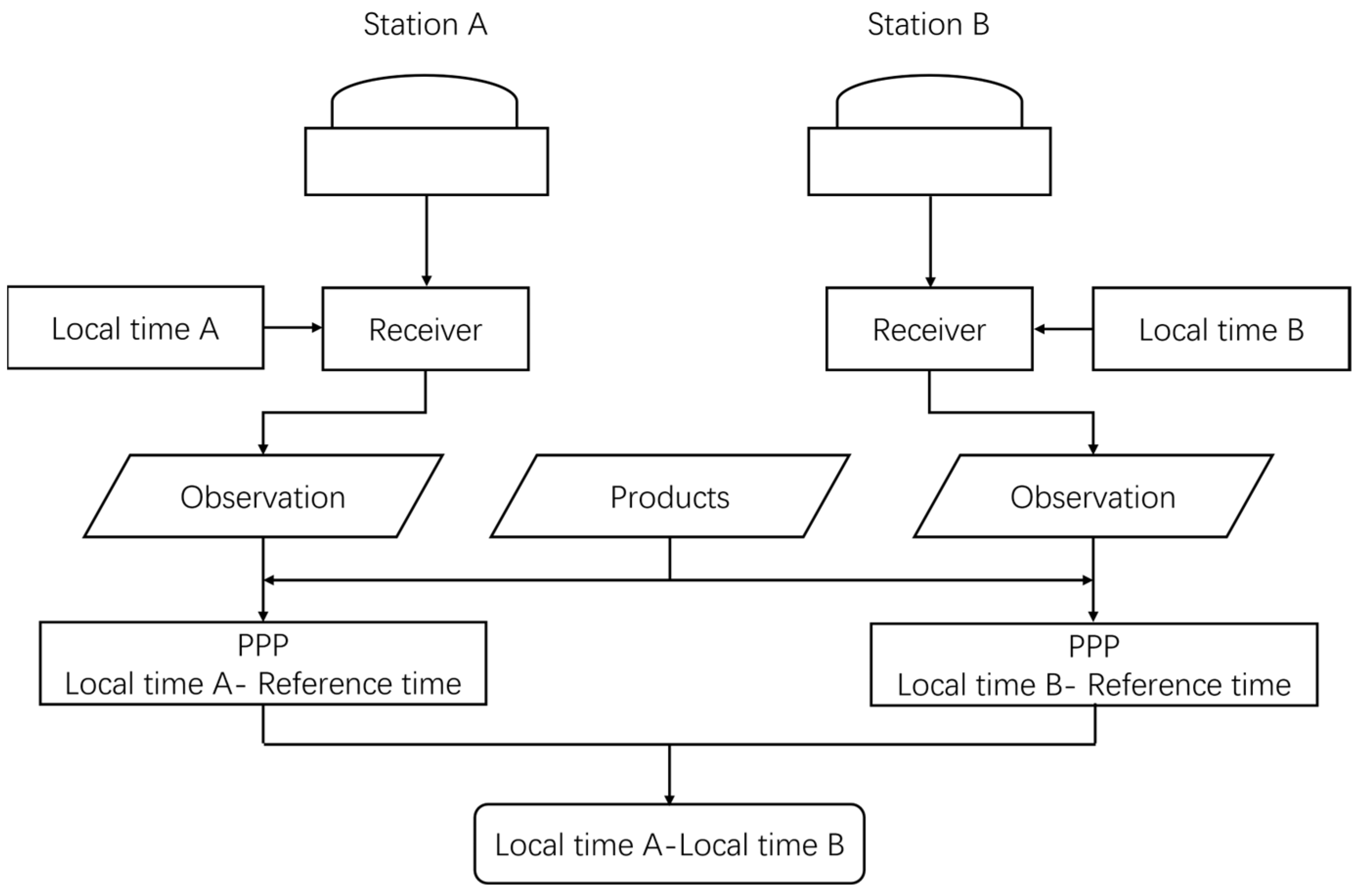
The receiver connected with the UTC(k) source signals is set as the base station. Real-time PPP computation with PPP-B2b corrections is performed with the observations of the base station receiver to obtain the difference between the UTC(k) and the PPP-B2b reference time. Users also perform the PPP computation with PPP-B2b corrections in real time and obtain the difference between the local time and the PPP-B2b reference time. Combining the time differences obtained from the base station and the user, the high-precision time difference between the user’s local time and UTC(k) is achieved in real time. In this way, high-precision UTC dissemination is realized. The high-precision UTC dissemination method based on PPP-B2b provides several service modes, including but not limited to the following:
(1). For users whose receivers can track and decode the PPP-B2b signal: PPP calculation is implemented at the user side with PPP-B2b corrections decoded from the user receiver. With the time difference information transmitted by the server, the user derives the time difference between local time and the UTC(k).
(2). For users whose receivers cannot track and decode the PPP-B2b signal: The user first receives the PPP-B2b corrections from the server to perform the PPP calculation, then computes the difference between local time and the UTC(k) together with the base station time difference information transmitted by the server.
(3). For users that cannot or will not perform the PPP calculation: The user sends the BDS/GNSS observations in real-time streams to the server. The server performs the real-time PPP calculation both for the base and the user station. The calculated time difference between local time and UTC(k) is returned to the user.
4. Experiment and Analysis
4.1. Design of the Experiment
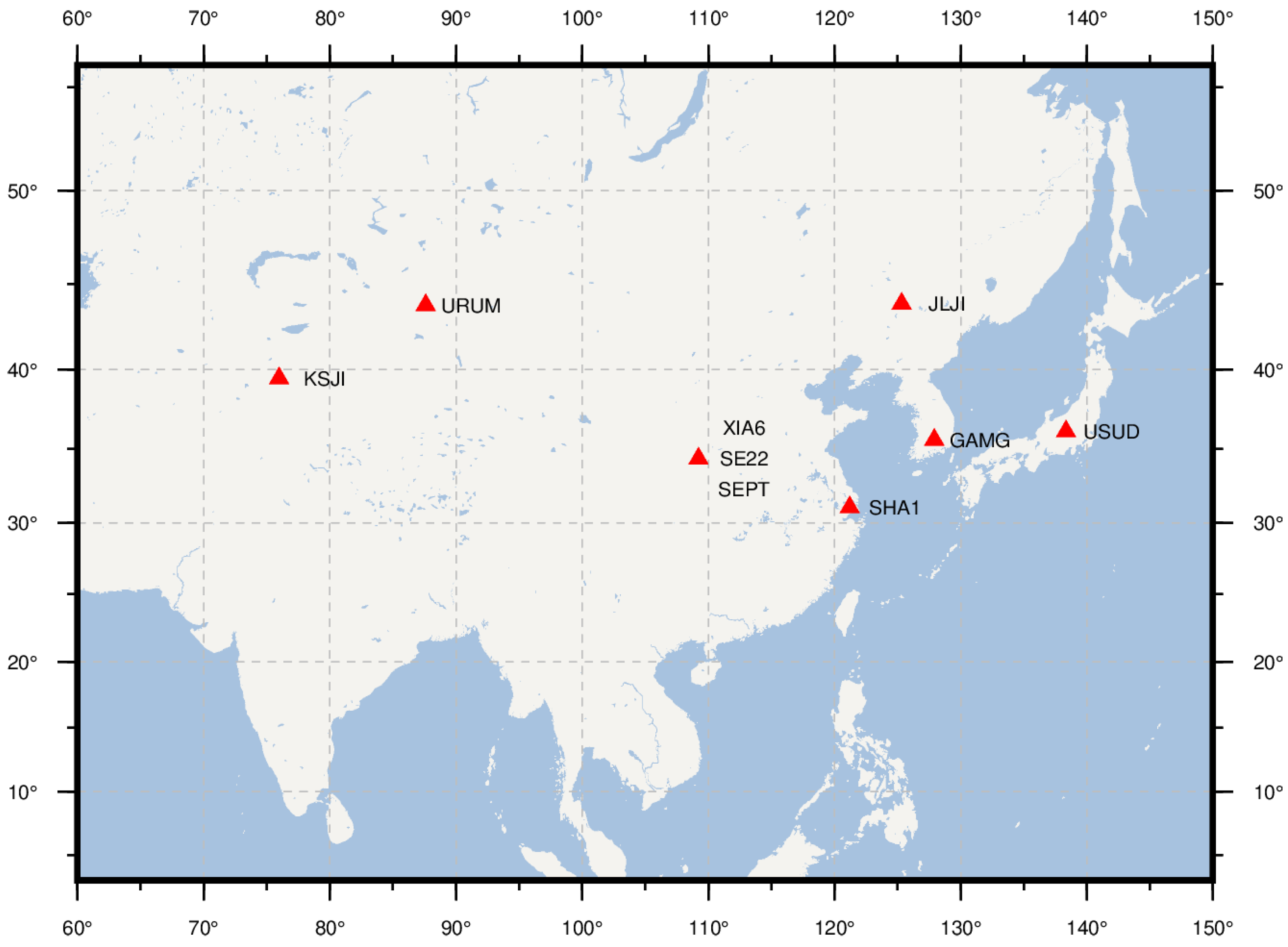
To evaluate and verify the timing accuracy of the proposed method, the XIA6 station was selected as the base station, and some other stations within the service area of the PPP-B2b were chosen for testing. The information of all the stations is shown in
Table 2. The experiment data period is 516 days, from 1 January 2021 (MJD 59215) to 31 May 2022 (MJD 59730), except for SE22, JLJI, and KSJI; the data period is shown in
Table 2. XIA6 and SE22 connected to the UTC (NTSC) master clock and shared the same antenna in Lintong, the headquarters of the National Time Service Center (NTSC), Chinese Academy of Sciences. The SEPT station is in the Xi’an campus of NTSC. It is externally steered to UTC (NTSC) in real time via a two-way optical fiber time and frequency transfer link. XIA6 and SE22 have not been calibrated to deduct the receiver hardware and cable delays. The XIA6-SE22 formed a common clock zero baseline, XIA6-SEPT is a short baseline of about 30 km, and the others are all long baselines over 1000 km. The location distribution of the stations used in the experiment is shown in
Figure 3.
The real-time static PPP processing is performed using the modified RTKLIB software [
32]. The modified RTKLIB 2.4.2 software can process the PPP-B2b products and the BDS 3-related observations and navigation messages. The PPP-B2b corrections are obtained from the Septentrio and Femtomes GNSS receivers in real time through the network, as shown in
Figure 4. Because of some factors, such as network conditions and receiver power outages, some epochs in the PPP-B2b corrections are missing.
Table 3 lists the settings used in the PPP processing.
For all the stations, BDS3-only and GPS-only calculations were performed with PPP-B2b orbit and clock products. The precise IGS IGR products and GFZ GBM products were used for comparison. For the PPP-B2b products, BDS3-only and GPS-only observations were processed. As for the GBM products, BDS3-only observations were processed. For the IGR products, GPS-only observations were processed.
In our experiment, three cases are considered, including PPP-B2b single-station one-way timing, PPP-B2b zero-baseline UTC dissemination, and PPP-B2b short and long baseline UTC dissemination.
(1). For the PPP-B2b single-station one-way timing test, three stations connected to the UTC (NTSC) and two stations connected to the hydrogen clock were used. The UTC (NTSC) results covered about 11 months, and the hydrogen clock covered about one month. The PPP results reflect the variation of the BDT timing, as the UTC (NTSC) and the hydrogen clock reference times are very stable. We can obtain the UTC timing variation values after correcting the UTC offset parameters achieved from broadcast navigation.
(2). For the PPP-B2b zero-baseline UTC dissemination, two stations connected to the UTC (NTSC) sharing the common antenna through a power splitter were used to obtain the PPP-B2b/GBM/IGR PPP results. The two stations formed a common clock zero baseline. The differences between the PPP-B2b PPP solutions of the two stations reflect the UTC (NTSC) timing performance. The STDs are used to assess the timing accuracy and the accuracy of the proposed UTC dissemination method can be verified. For comparison, the GBM and IGR products were also used.
(3). For the PPP-B2b short and long baseline UTC dissemination, one base station and seven user stations were selected, forming one short baseline and six long baselines. Regarding station locations, stations within the PPP-B2b service area and at the edge were selected. Regarding externally connected clocks, stations connected to hydrogen, rubidium, and crystal oscillators were selected. All these are important factors affecting the observing or timing accuracy. The link comparison method was used to evaluate the performance of UTC dissemination based on PPP-B2b. The GBM was selected as one of the base products because it contains the BDS-3 satellites. We also chose the IGR product because BIPM selects the IGR products to perform the routine international UTC comparisons. GPS-only and BDS3-only PPP were calculated with PPP-B2b products, BDS3-only PPP was calculated with GBM products, and GPS-only PPP was calculated with IGR products. The bias between the timing link based on PPP-B2b products and the timing link based on GBM/IGR products was first calculated. The STD of the bias was then computed to evaluate the timing precision with the following:
where
represents the GBM/IGR timing link result,
represents the PPP-B2b timing link result,
represents the number of samples.
Here, we did not calibrate the equipment used for the experiment. The receivers and antennas used in the experiment have been widely applied in UTC dissemination and IGS tracking networks, showing good stability in equipment delay. The main focus of the work was to analyze the precision of time transfer, particularly the fluctuation analysis of time transfer results. The evaluation of short baseline and long baseline time transfer precision was achieved by comparison with the post-event precise product-based PPP time transfer results. The equipment delay impacts in these two methods are identical and can be offset. This method of precision evaluation does not require time delay calibration.
4.2. Performance Evaluation of PPP-B2b One-Way Timing
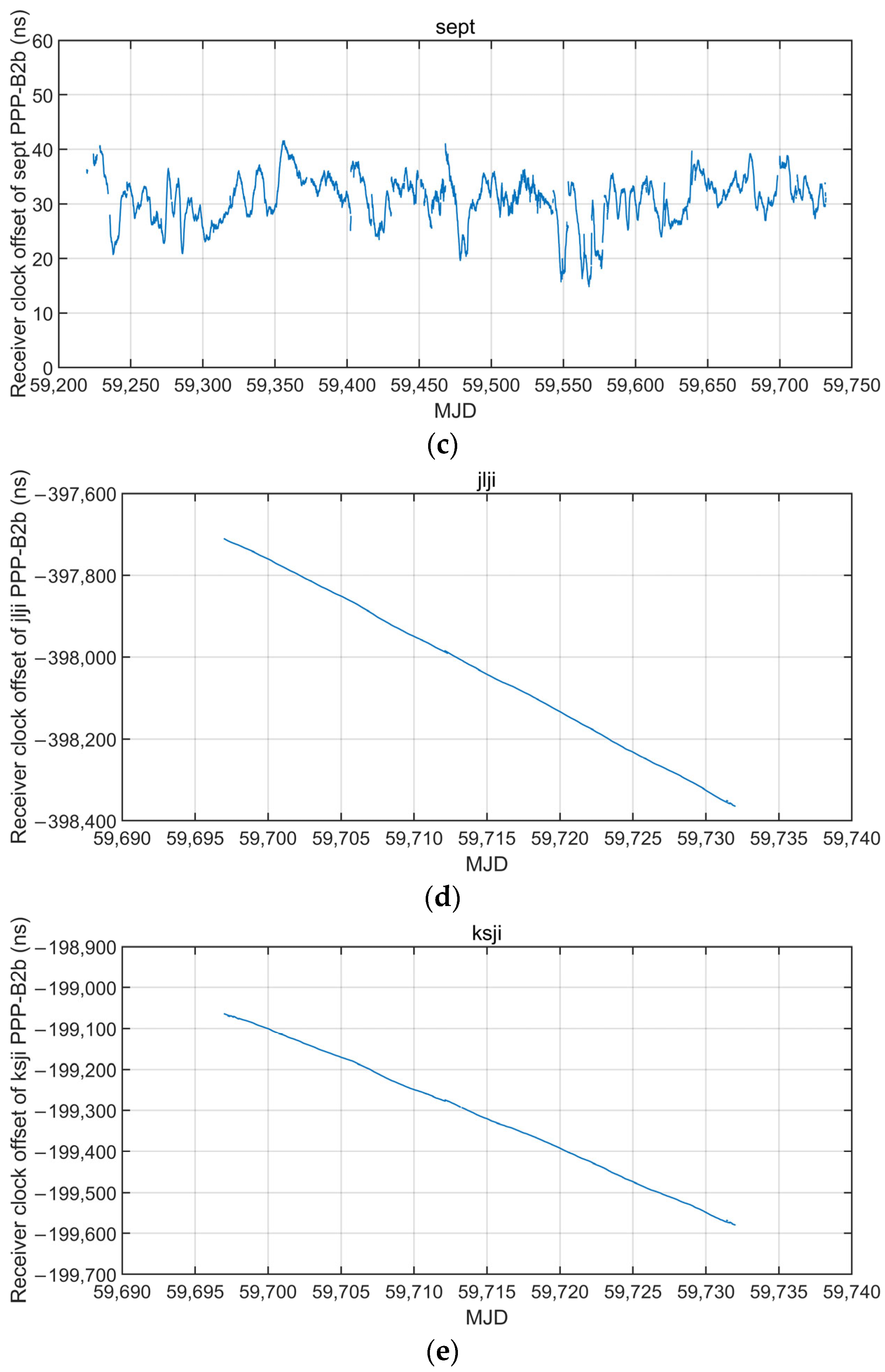
Single-station timing performance was evaluated after performing the PPP calculation using the data from stations XIA6 and SE22 connected to UTC (NTSC), station SEPT connected to UTC (NTSC), and station JLJI and KSJI connected to hydrogen clocks. The time differences between the local time of the stations mentioned above and the PPP-B2b BDS-3 reference time, which contain B1I/B3I IF receiver code biases, are shown in
Figure 5.
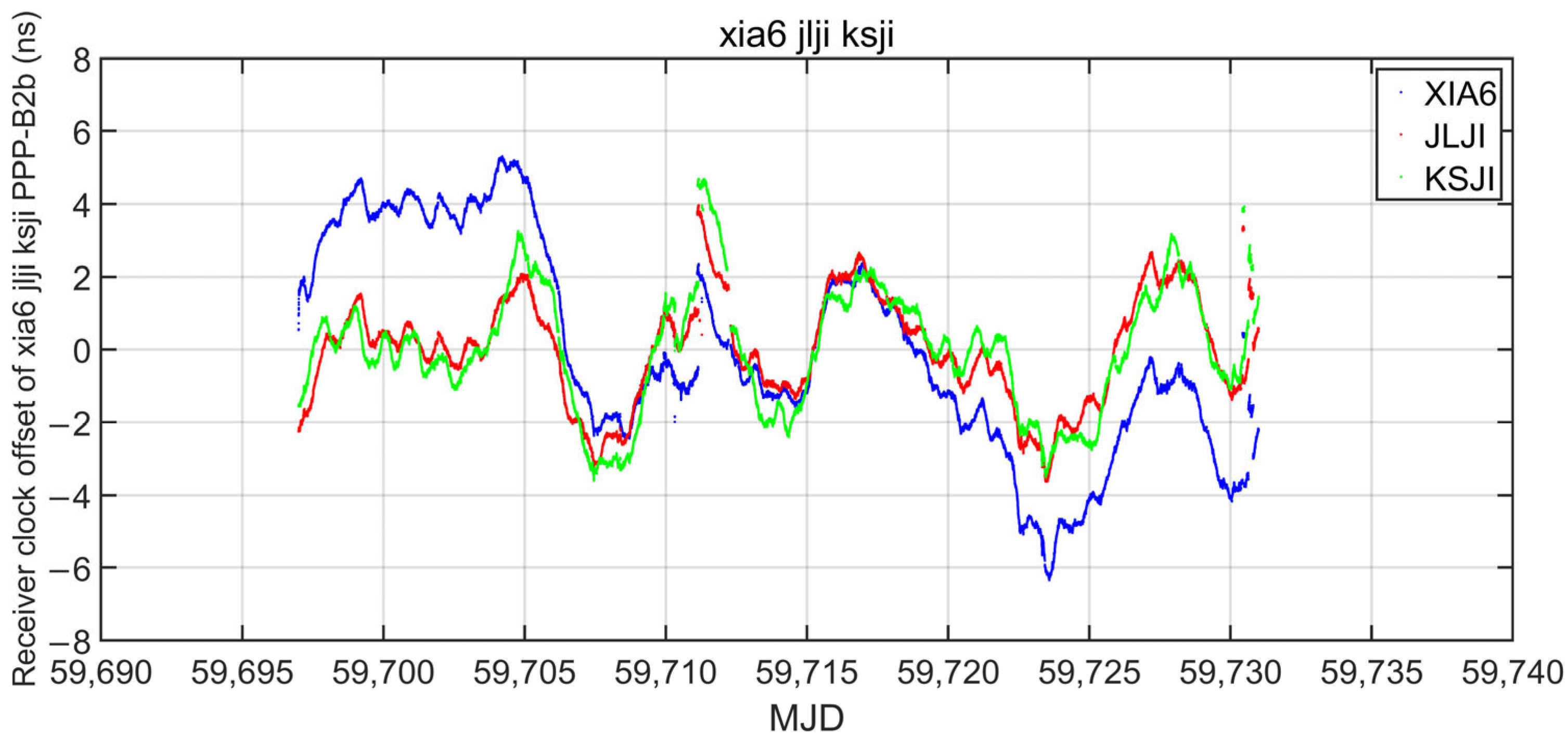
From the time series of the receiver clock offsets of XIA6, SE22, and SEPT, it can be observed that the ranges of the y-axis label are different because receiver bias and the cable delay were not calibrated. The peak-to-peak values of the differences between the PPP-B2b reference time and UTC (NTSC) within the experiment periods are within 26 ns. There is no long-term offset in the difference value between the PPP-B2b reference time and UTC (NTSC). However, the figure shows that the PPP-B2b reference time may experience jumps of a few nanoseconds in very few cases. The correction values transmitted by PPP-B2b can also confirm this. From the time series of the receiver clock offsets of JLJI and KSJI, it can be observed that the clock offsets roughly reflected the linear trend characteristics of the hydrogen clocks. To see the stability of the PPP-B2b reference time, the linear trend must be removed from the JLJI and KSJI results. Here, we adopted a piecewise linear fit method to remove the linear trend of the hydrogen clock, with a segment interval of 7 days, which was determined by analyzing the differential data of the JLJI and KSJI clock offset results. The clock offset is relatively stable after removing the linear trend. For comparison, the results of the XIA6 station of the same period were subtracted by the mean value, as shown in
Figure 6.
During the period of 34 days, the XIA6, JLJI, and KSJI receiver clock offsets were consistent. There is a noticeable jump of about 2.5 ns in MJD 59711 caused by the jump in the PPP-B2b reference time. To obtain UTC from the PPP-B2b reference time, UTC offset corrections from the broadcast navigation message must be used. First, the one-hour sampling interval clock offsets were corrected by the UTC offset corrections, and then the linear trend was removed. This is shown in
Figure 7.
As shown in
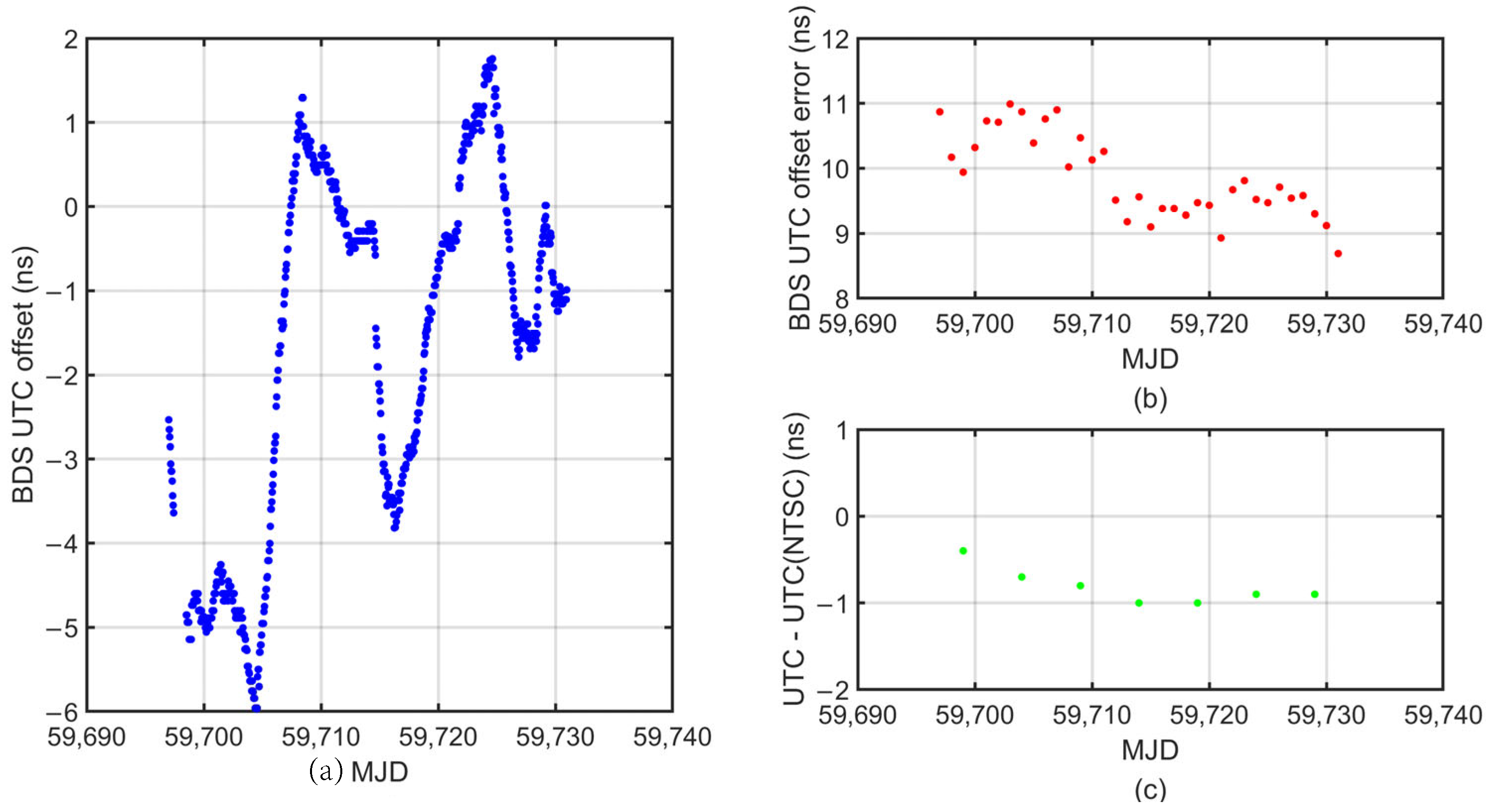
Figure 7, the XIA6 results reflect the difference between the PPP-B2b-delivered UTC and UTC (NTSC), which varied in the range of about −6 ns to 2 ns. The differences between UTC recovered by PPP-B2b and UTC (NTSC) show relatively minor fluctuations within 2 ns in most periods. They align well with each other. The STD of the XIA6 clock offset is 1.26 ns, exceeding the sub-nanosecond level. The JLJI and KSJI results reflect the PPP-B2b-delivered UTC variation, varying from about −4 ns to 4 ns. The related time series of BDS UTC offset, UTC offset errors, and the difference between UTC and UTC (NTSC) are shown in
Figure 8. The BDS UTC offset and UTC offset errors were obtained from iGMAS. The difference between UTC and UTC (NTSC) was obtained from BIPM.
Figure 8 shows that the peak-to-peak BDS UTC offset is about 8 ns, and the mean BDS UTC offset error is about 10 ns within the BDS official accuracy standard of ≤20 ns. Here, the UTC offset error refers to the bias of the differences between BDT and UTC (NTSC). The UTC offset error is equal to the RMS of the difference between the UTC offset broadcast value and the UTC offset monitored value, which includes a deviation. The UTC offset error is calculated as [
33,
34]:
where
represents the UTC offset broadcast value,
represents the UTC offset monitored value, and
represents the number of samples.
Figure 8b shows that the overall trend of the UTC offset error is consistent with that of
Figure 7. As can be seen from
Figure 7 and
Figure 8b, there is an inflection at MJD 59715. The general trend, especially for XIA6 connected to UTC (NTSC), is more consistent with
Figure 8b. Here we can see that the two figures can prove each other.
Figure 8c indicates that the UTC–UTC (NTSC) difference peak-to-peak value is about 1 ns during this period. However, as mentioned in the introduction, UTC is unavailable for direct dissemination. The UTC dissemination service refers to delivering the local UTC(k) time scales to users. Here, the users obtained high-precision UTC (NTSC), which also means they obtained high-precision UTC.
Finally, from
Figure 7 and
Figure 8, it is verified that the PPP-B2b cannot be used directly to perform a sub-nanosecond level UTC dissemination service with the one-way timing mode.
4.3. PPP-B2b Zero-Baseline UTC Dissemination
In addition to the common frequency signals from UTC (NTSC), stations SE22 and XIA6 share the common antenna through a power splitter. Real-time time transfer between the SE22 station and the XIA6 station based on the PPP-B2b/GBM/IGR products can form a common clock zero baseline. The common clock zero-baseline timing results also include the IF code biases between the two receivers, which are considered stable within the test period. As such, zero baselines with the same clock can be used to assess the timing performance.
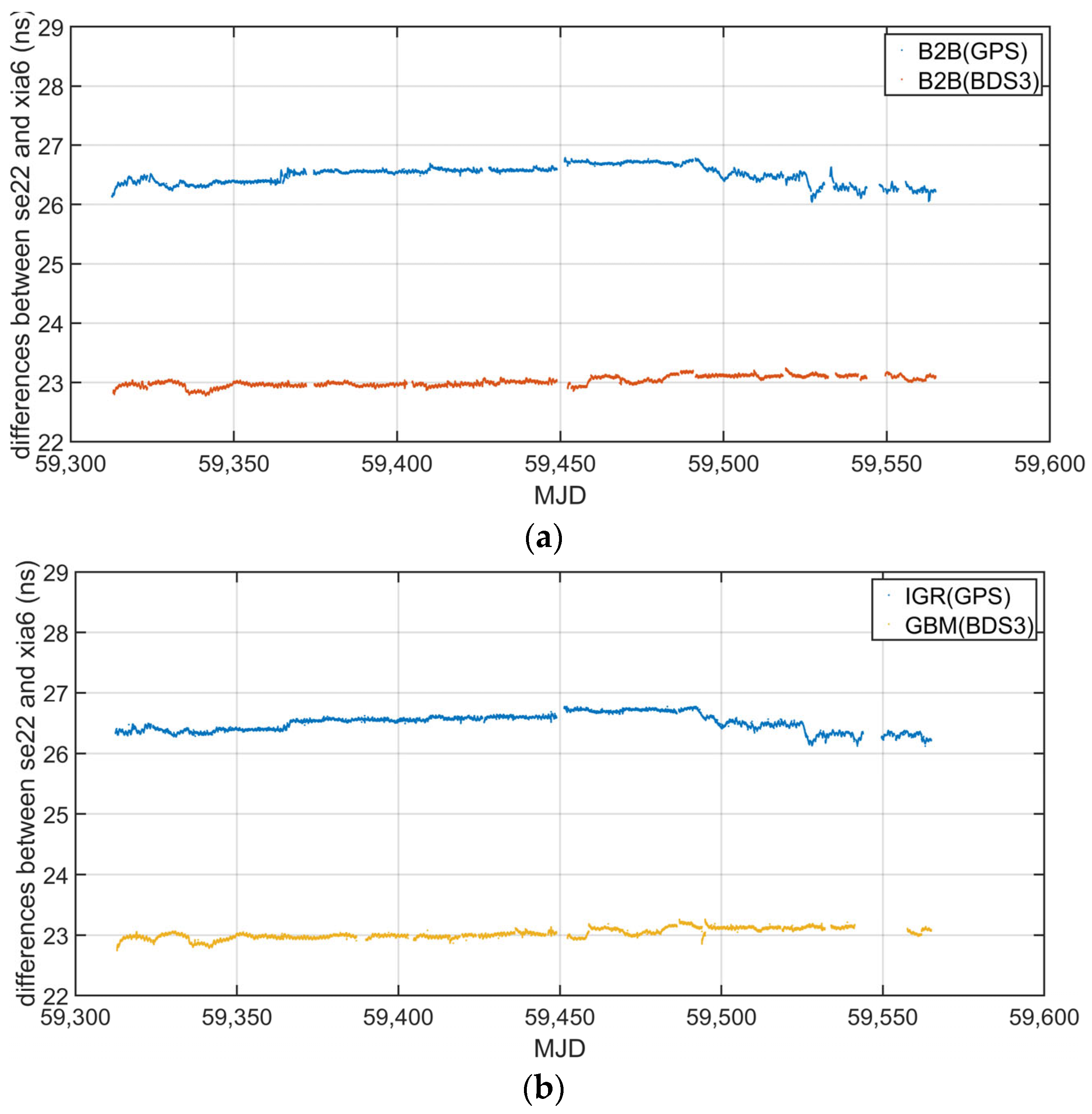
Figure 9 shows the XIA6-SE22 zero-baseline time transfer results based on different products. Apparent reconverging data caused by missing data have been removed from the figure. The experiment data period is from 10 April 2021 (MJD 59314) to 16 December 2021 (MJD 59564), i.e., about 251 days. It can be seen that the timing series are stable. After removing convergence, the STDs of the results using the B2b, GBM, and IGR products are all smaller than 0.2 ns.
Table 4 shows the STD statistics of the timing results.
In addition, the PPP-B2b(BDS-3) timing result in
Figure 9 is in good agreement with the GBM(BDS-3) link result, the PPP-B2b(GPS) timing result is in good agreement with the IGR(GPS) link result, and there is bias between the GPS and BDS-3 results, which is mainly caused by the inter-system equipment bias between GPS and BDS-3.
The statistics of the PPP-B2b zero-baseline UTC dissemination series show that the timing uncertainty is better than 0.2 ns. The result can be used to assess the possible highest accuracy timing performance of the proposed UTC dissemination method.
4.4. PPP-B2b Short and Long Baseline UTC Dissemination
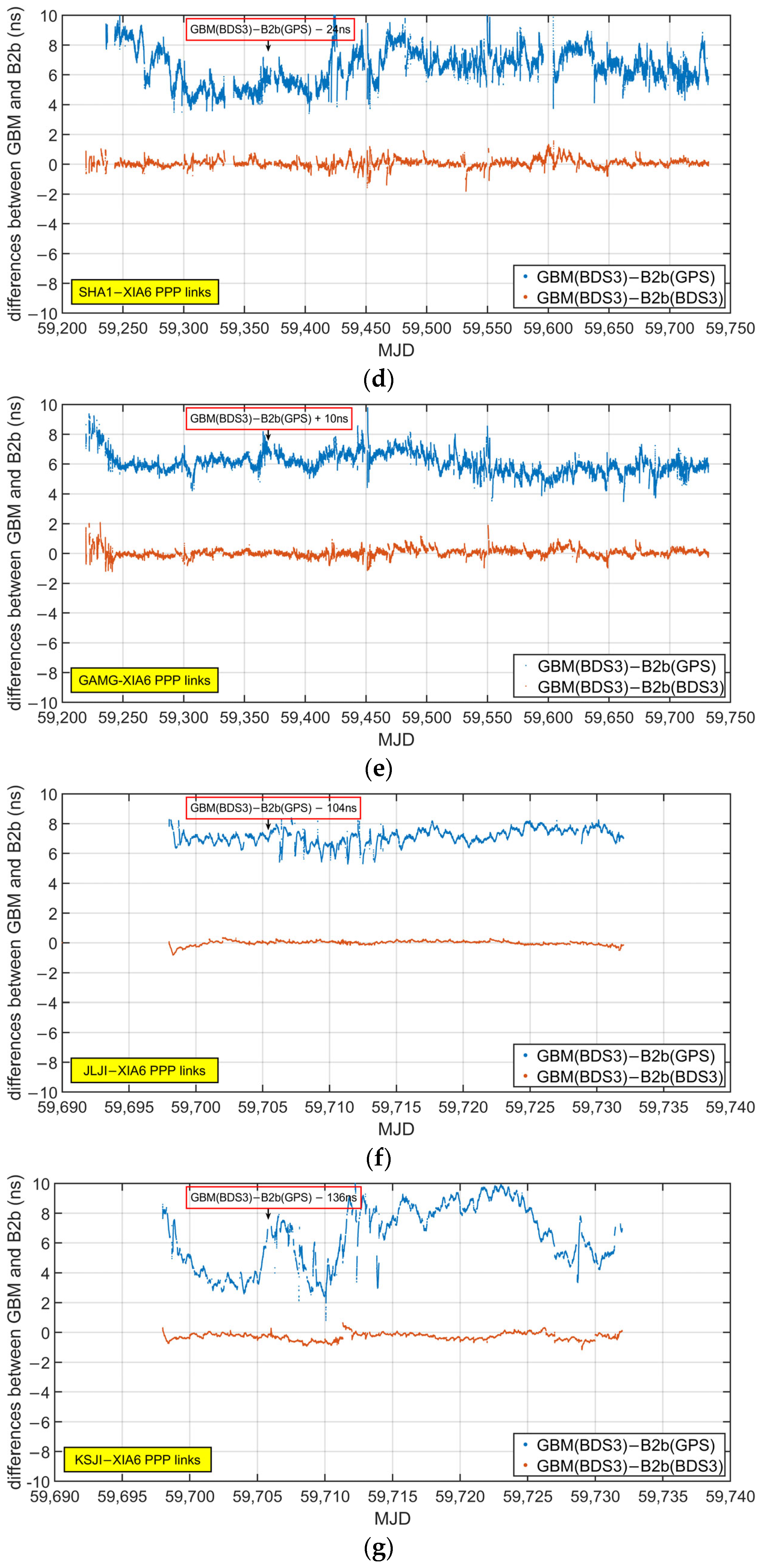
The distance between the base station and the user station is an essential factor that affects timing accuracy. To evaluate the timing accuracy of different lengths of baselines, we selected seven links in this experiment: short baseline XIA6-SEPT, long baselines XIA6-USUD, XIA6-URUM, XIA6-SHA1, XIA6-GAMG, XIA6-JLJI, and XIA6-KSJI. The PPP time transfer of the seven links was conducted to obtain the time differences between the latter stations of each baseline and UTC (NTSC) (from XIA6) using the PPP-B2b, GBM, and IGR products, respectively. The differences between the results obtained by the PPP-B2b products and those obtained with the other two products are then calculated. The STDs are derived using Equation (6) in
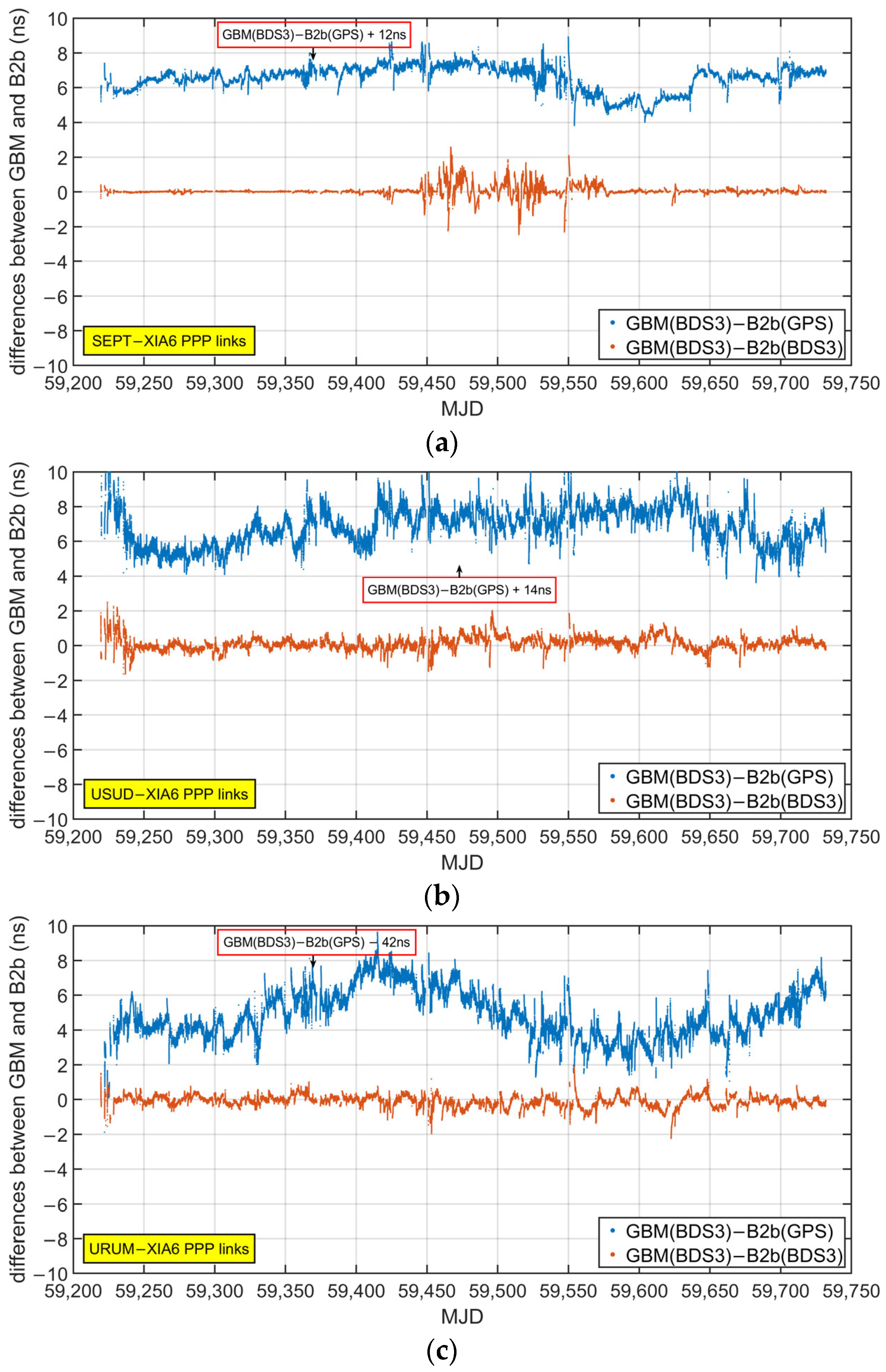
Section 4.1 to evaluate the uncertainty of the timing results. The mean values are also calculated to assess the absolute biases from zero. The timing differences of PPP-B2b and GBM are shown in
Figure 10, and the results of PPP-B2b and IGR are demonstrated in
Figure 11. The statistical information comparing GBM and IGR is presented in
Table 5 and
Table 6, respectively.
In particular, the PPP-B2b corrections are received through the network, and there are many interruptions, resulting in the re-convergence of the calculation. Here, in
Figure 11 and
Figure 12, and in
Table 5 and
Table 6, we used the moving median method to eliminate outliers. A threshold of three times the median was set, and data points exceeding this threshold were considered outliers and removed. This method is primarily employed to eliminate abnormal data, such as the re-convergence data. In addition, the GBM(BDS3)-B2b(GPS) results in
Figure 11 and the IGR(GPS)-B2b (BDS3) results in
Figure 12 have an offset from zero and present opposite trends. The inter-system bias between GPS and BDS-3 in the receivers may be responsible for this phenomenon. In the long term, there is a variation in the inter-system bias between different systems.
The STDs of the timing link comparison results between the PPP-B2b products and the GBM and IGR products are all better than 2.1 ns. Due to the inter-system bias in the comparison results of links between different satellite systems, we can see large different MEAN values from the B2b(GPS)-GBM(BDS-3) and B2b(BDS-3)-IGR(GPS) results in
Table 5 and
Table 6. From
Figure 11 and
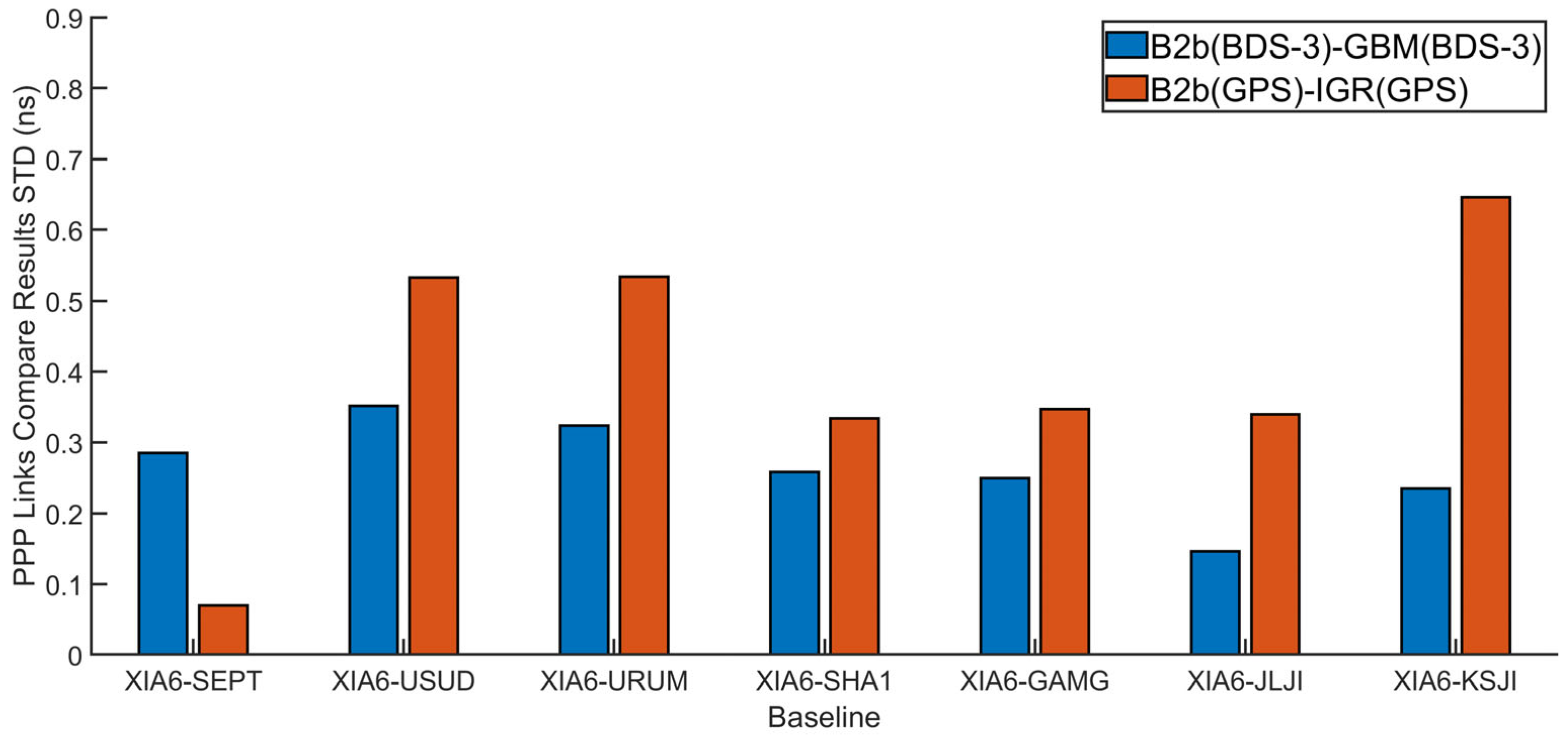
Figure 12, we can also find that the inter-system bias between GPS and BDS3 is not constant, which leads to the large RMS values between different satellite systems results. Therefore, the PPP-B2b timing accuracy evaluation mainly uses the same satellite system. In the comparison, the PPP-B2b (BDS-3) results are compared with the GBM (BDS-3) product results, and the PPP-B2b (GPS) results are compared with the IGR (GPS) product results, as shown in
Figure 12.
As shown in
Figure 12, the STD of PPP-B2b (BDS-3) compared with the GBM product is better than 0.4 ns, and the STD of PPP-B2b (GPS) compared with the IGR product is better than 0.7 ns.
From the results of the short baseline XIA6-SEPT, we can see that when the PPP-B2b BDS-3 result is compared with the GBM product, where the STD is 0.285 ns, and the PPP-B2b GPS result is compared with IGR product, where the STD can reach 0.070 ns. The former STD is larger than the latter, which is different from the long baseline results. This result is because there is an obvious abnormality in the GBM(BDS3)-B2b(BDS3) results from MJD 59450 to MJD 59575. After removing this abnormal data, the STD is 0.067 ns. The results indicate that the PPP-B2b short baseline timing uncertainty can be better than 100 ps under normal circumstances.
From the results of the long baseline comparison, the continuity of the results of IGR products is slightly better than that of GBM products, and the number of the re-convergences is less. However, the comparison results of PPP-B2b (BDS-3) with GBM products in terms of STD are better than those of PPP-B2b (GPS) with IGR products. The main reason for this is that the number of BDS satellites broadcast by the PPP-B2b product is more than the number of GPS satellites, and the solutions are more stable. The STD of the PPP-B2b results compared with the IGR product is less than 0.7 ns, and that compared with the GBM product is less than 0.4 ns. This shows that the long baseline timing result based on PPP-B2b can also reach the sub-nanosecond level. From the results, we can also find that the results of longer baselines, such as XIA6-USUD, XIA6-URUM, and XIA6-KSJI, are slightly worse than the shorter baselines, especially for B2b(GPS)-IGR(GPS) results, which is mainly caused by the limited service areas of PPP-B2b.
5. Conclusions
Based on several stations connected to high-quality time and frequency signals, the single-station timing performance of the BDS-3 PPP-B2b service was evaluated. The results showed that the peak-to-peak values between the PPP-B2b reference time and UTC (NTSC) are within 26 ns. Regardless of the constant bias, the difference between the UTC restored by PPP-B2b one-way timing and UTC (NTSC) is better than a few ns. However, the PPP-B2b cannot be directly used for a single-station sub-nanosecond level UTC dissemination service.
Based on the PPP time transfer principle, this paper proposed a precise timing method of UTC dissemination based on the BDS-3 PPP-B2b service. BDS-3 and GPS actual observation data from 1 January 2021 to 31 May 2022 were used to perform simulated real-time calculations to evaluate the possible timing uncertainty of the method and to evaluate the time transfer performance of PPP-B2b products.
According to the experiment, the STDs of comparison results between PPP-B2b and IGR/GBM are all under 0.2 ns, indicating that the uncertainty of the proposed timing method can be better than 200 ps. When compared with the same satellite system, the short and long baseline timing transfer STDs compared with GBM/IGR are less than 0.4 ns for BDS-3 and less than 0.7 ns for GPS, indicating that in practical applications, in which the antenna/cable/receiver delay is accurately calibrated, the timing uncertainty of the method can reach the sub-nanosecond level.
Further research will be undertaken to build the method’s prototype system and provide the real-time sub-nanosecond UTC dissemination service through the PPP-B2b signal.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}