
GNSS Carrier-Phase Multipath Modeling and Correction: A Review and Prospect of Data Processing Methods

 ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Multipath Error Principle and Mitigation Methods
2.1. Generation Principle of Multipath Errors
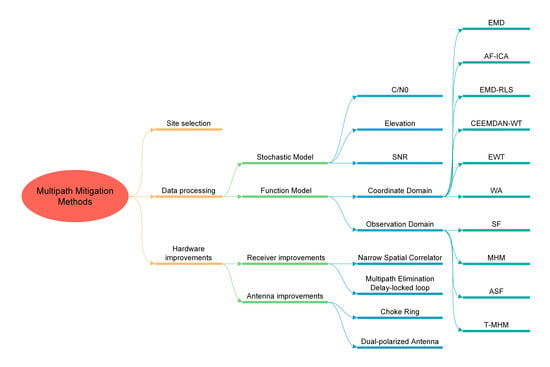
2.2. Multipath Error Mitigation Methods
3. Research Status of the Multipath Error Data Processing Algorithm
3.1. Multipath Error Mitigation Methods Based on the Stochastic Model
3.2. Multipath Error Mitigation Method Based on the Function Model
3.2.1. Multipath Error Mitigation Method Based on the Coordinate Domain
3.2.2. Multipath Error Mitigation Method Based on the Observation Domain
- According to the first phase of GNSS navigation ephemeris data, the average angular velocity of different satellites is calculated and the time offset of the repeat period of different satellites is obtained.
- According to the GNSS baseline observation data of the first phase, errors such as satellite clock error, receiver clock error, satellite orbit error, tropospheric delay, and ionospheric delay are eliminated by constructing a double-difference observation equation. The double-difference ambiguity is fixed using the LAMBDA algorithm.
- Double-difference residuals are converted to single-difference residuals based on the “zero-mean assumption”; wavelet analysis, EMD, or other filters are used to process the signal, and low-frequency components of single-difference residuals are extracted.
- Using the obtained satellite repetition cycle time offset, the satellite single-difference residual time series is time-corrected based on GPST to obtain the single-difference residual low-frequency component correction model for the next repetition cycle. Finally, the SF model of the observation domain for multipath error mitigation in the next period is obtained.
- According to the GNSS baseline observation data of the second phase, the satellite single-difference observation equation is constructed, and the corresponding satellite multipath error correction value in the sidereal filtering multipath model is extracted based on the GPST timestamp. The single-difference observation equation weakened by the multipath error is reconstructed into a satellite double-difference observation equation.
- The Kalman filter is used to estimate the floating-point solution of the ambiguity, and the LAMBDA algorithm is used to fix the double-difference ambiguity. The double-difference ambiguity is substituted into the solution equation to obtain a fixed-point solution for the baseline solution, which mitigated the multipath error.
- Single-difference residual low-frequency components are extracted using the filtering method from the first-period observation data.
- For different satellite constellations, different hemisphere geometric models are established. Based on the minimum elevation, maximum elevation, azimuth angle, minimum grid latitude, and minimum grid longitude, the hemispherical geometric model of GPS/BDS IGSO/BDS MEO satellites is established; based on the minimum elevation, maximum elevation, minimum azimuth, maximum azimuth, minimum latitude interval, and minimum longitude interval, the semi-celestial geometric model of the BDS GEO satellite is established.
- Based on the instantaneous elevation and azimuth of the satellite, the low-frequency components of the instantaneous single-difference residual of the satellite are divided into the corresponding grids of the hemispherical geometric model (HGM)/GEO hemispherical geometric model (GEOHGM).
- The mean value of the low-frequency component of the satellite single-difference residual in each grid is calculated, that is, the parameter fitting of the semi-celestial spherical grid. Finally the MHM/MHMGEO corresponding to HGM/HGMGEO is obtained.
- The second-phase GNSS baseline monitoring data are used to construct a single-difference observation equation. The grid parameters of the MHM model are obtained based on the satellite azimuth and elevation of the current epoch and the multipath error correction of the single-difference observation equation is conducted.
- The single-difference observation equation that was weakened by multipath errors was reconstructed into a satellite double-difference observation equation. The LAMBDA algorithm is used to fix the double-difference ambiguity and the double-difference ambiguity is substituted into the solution equation to obtain a fixed-point solution for the baseline solution.
3.2.3. Summary
4. Application Scenarios of the Multipath Error Mitigation Algorithm
4.1. GNSS Deformation Monitoring
4.2. Precise Positioning of Urban Areas
5. Conclusions
- Extend the current multipath error correction modeling method to the multi-frequency data of multi-GNSS systems, including GPS, BDS, Galileo, GLONASS, and other systems. Zou et al. [115] extended the MHM method and proposed a MHGM (multi-point hemispherical grid model, MHGM) method suitable for multi-GNSS systems. This approach enabled the fusion of observation data from different GNSS systems for MHGM modeling, demonstrating a significant attenuation effect on the multipath errors of GNSS signals. At present, the fusion processing of multi-system and multi-frequency GNSS data has emerged as the future trend in satellite positioning [116]. Research into multipath error processing methods suitable for multi-system and multi-frequency GNSS data constitutes a focal point for future investigations.
- Enhance the effectiveness of multipath mitigation methods in practical applications. In order to improve the positioning accuracy and operating efficiency in actual engineering practice, research on multipath error mitigation should be developed to achieve real-time application, intelligence [117], and engineering application, and the actual application scenarios should be extended to single-point positioning, dynamic scenes, and more complex environments with severe occlusions.
- Integrate deep learning and machine learning technology into multipath error mitigation. Xu and Tao [118] used a combination of deep learning network long short-term memory network (LSTM) and EMD to predict and weaken the impact of multipath effects. Tao et al. [119] constructed a time–frequency mask and convolutional neural network (TFM–CNN) model, which had a remarkable effect on separating the multiple paths of GNSS observation sequences in real-time deformation monitoring. Gong et al. [120] used the K-means clustering algorithm from machine learning to distinguish direct signals and reflected signals in urban environments to achieve the purpose of improving positioning accuracy. By processing GNSS data through deep learning and machine learning technology, the strengths of these approaches are leveraged to improve the capability of handling GNSS data and enhance the accuracy and reliability of GNSS positioning results.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qu, Y.; Fang, Y.; Li, J. GNSS technology and its development trend. J. Shandong Agric. Adm. Coll. 2010, 27, 156–157+159. [Google Scholar]
- Ning, J.; Yao, Y.; Zhang, X. Review of the development of global satellite navigation system. J. Navig. Position. 2013, 1, 3–8. [Google Scholar]
- Yang, Y.; Mao, Y.; Sun, B. Basic performance and future developments of Badious global navigation satellite system. Satell. Navig. 2020, 1, 8. [Google Scholar] [CrossRef]
- Xu, S. Principle and Application of GPS Measurement, 4th ed.; Wuhan University Press: Wuhan, China, 2008. [Google Scholar]
- Li, Z.; Huang, J. GPS Measurement and Data Processing, 3rd ed.; Wuhan University Press: Wuhan, China, 2010. [Google Scholar]
- Yi, Q. Research on the Multipath Mitigation Method for GPS/BDS Real-Time High-Precision Deformation Monitoring. Master’s Thesis, Wuhan University, Wuhan, China, 2017. [Google Scholar]
- Cai, R. Research on Modeling and Correction Method of Badious Satellite-Induced Multipath Error. Master’s Thesis, Information Engineering University, Zhengzhou, China, 2017. [Google Scholar]
- Tao, J. Research on Processing Methods of badious Satellite-Induced Code Multipath Bias. Master’s Thesis, Changsha University of Science & Technology, Changsha, China, 2019. [Google Scholar]
- Li, J. Researches on the Algorithms of GNSS Triple Frequency Precise Positioning. Master’s Thesis, Information Engineering University, Zhengzhou, China, 2011. [Google Scholar]
- Leica, A. GPS Satellite Surveying, 3rd ed.; Wiley: Hoboken, NJ, USA, 2004. [Google Scholar]
- Yuan, L.G.; Huang, D.; Ding, X.L. On the influence of signal multipath effects in GPS carrier phase surveying. Acta Geod. Cartogr. Sin. 2004, 33, 210–215. [Google Scholar]
- Shao, C.; Zeng, Q.; QIiu, W.; Xu, R. Overview of GNSS Multipath Mitigation Baseband Processing Algorithm. Navig. Position. Timing. 2022, 9, 1–14. [Google Scholar]
- Gao, X. Gnss Carrier Phase Multipath Modeling and Software Development for Structures Deformation Monitoring. Master’s Thesis, China University of Mining and Technology, Xuzhou, China, 2022. [Google Scholar]
- Ma, X. The Research on BDS Multipath Error. Master’s Thesis, China University of Mining and Technology, Xuzhou, China, 2017. [Google Scholar]
- Xu, G. GPS: Theory, algorithms and applications. In Proceedings of the Springer Publishing Company, Incorporated; Springer Berlin, Heidelberg Publisher: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Li, S.; Chen, J.; Tan, S.; Zhi, C. Research on multipath limiting antenna array with fixed phase center. GPS Solut. 2015, 19, 505–510. [Google Scholar]
- Groves, P. GNSS solutions: Multipath vs. NLOs signals. How does non-line-of-sight reception differ from multipath interference. Inside GNSS Mag. 2013, 8, 40–42. [Google Scholar]
- Filippov, V.; Tatarnicov, D.; Ashjaee, J.; Astakhov, A.; Sutiagin, I. The first dual-depth dual-frequency choke ring. In Proceedings of the International Technical Meeting of Satellite Division of the Us Institute of Navigation, Nashville, TN, USA, 15–18 September 1998. [Google Scholar]
- Ray, J.; Cannon, M.; Fenton, P. GPS code and carrier multipath mitigation using a multiantenna system. IEEE Trans Aerosp Electron Syst. 2001, 37, 183–195. [Google Scholar] [CrossRef]
- Krantz, E. The Design and Performance of The Zephyr Geodetic Antenna. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Salt Lake City, UT, USA, 11–14 September 2001. [Google Scholar]
- Danskin, S.; Bettinger, P.; Jordan, T. Multipath Mitigation under Forest Canopies: A Choke Ring Antenna Solution. For. Sci. 2009, 55, 109–116. [Google Scholar]
- Groves, P.D.; Jiang, Z.; Skelton, B.; Cross, P.A. Novel multipath mitigation methods using a dual-polarization antenna. In Proceedings of the ION GNSS 2010, Portland, OR, USA, 21–24 September 2010. [Google Scholar]
- Maqsood, M.; Gao, S.; Brown, T.; Unwin, M.; De, V.; Xu, J.D. A Compact Multipath Mitigating Ground Plane for Multiband GNSS Antennas. IEEE Trans. Antennas Propag. 2013, 61, 2775–2782. [Google Scholar] [CrossRef]
- Zhang, K.; Li, B.; Zhu, X.; Chen, H.; Sun, G. NLOS Signal Detection Based on Single Orthogonal Dual-Polarized GNSS Antenna. Int. J. Antenn. Propag. 2017, 2017, 8548427. [Google Scholar] [CrossRef]
- Nee, R.D.J.V. The Multipath Estimating Delay Lock Loop. In Proceedings of the IEEE Second International Symposium on Spread Spectrum Techniques and Applications, Yokohama, Japan, 29 November–2 December 1992. [Google Scholar]
- Chen, X.; Dovis, F.; Peng, S.; Morton, Y. Comparative Studies of GPS Multipath Mitigation Methods Performance. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1555–1568. [Google Scholar] [CrossRef]
- Dierendonck, A.J.v.; Fenton, P.; Ford, T.J.R. Theory and Performance of Narrow Correlator Spacing in a GPS Receiver. Annu. Navig. 1992, 39, 265–283. [Google Scholar] [CrossRef]
- Qiu, W.; Zeng, Q.; Xu, R.; Liu, J.; Shi, J.; Meng, Q. A multipath mitigation algorithm for GNSS signals based on the steepest descent approach. Satell. Navig. 2022, 3, 14. [Google Scholar] [CrossRef]
- Brunner, F.K.; Hartinger, H.; Troyer, L. GPS signal diffraction modelling: The stochastic SIGMA-δ model. J. Geod. 1999, 73, 259–267. [Google Scholar] [CrossRef]
- Zhang, B.; Huang, J.; Su, L. A research on using SNR values to mitigate carrier phase multipath in GPS surveying. Sci. Surv. Mapp. 2003, 3, 32–35+84. [Google Scholar]
- Liu, X.; Dick, D. An Approach to Precise GPS Kinematic Positioning with a Refined Stochastic Model. Acta Geod. Cartogr. Sin. 2003, 32, 293–300. [Google Scholar]
- Ding, K. IGS Stations’ High-Precision Solution Based on the Stochastic Model and Its Time Series Analysis. Master’s Thesis, Shandong University of Science and Technology, Qingdao, China, 2010. [Google Scholar]
- Strode, P.; Groves, P. GNSS multipath detection using three-frequency signal-to-noise measurements. GPS Solut. 2016, 20, 399–412. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B.; Shen, Y.; Gao, Y.; Wang, M. Site-Specific Unmodeled Error Mitigation for GNSS Positioning in Urban Environments Using a Real-Time Adaptive Weighting Model. Remote Sens. 2018, 10, 1157. [Google Scholar] [CrossRef]
- Zhang, Y. Real-time carrier phase multipath detection based on dual-frequency C/N0 data. GPS Solut. 2019, 23, 7. [Google Scholar] [CrossRef]
- Xi, R.; Meng, X.; Jiang, W.; An, X.; He, Q.; Chen, Q. A Refined SNR Based Stochastic Model to Reduce Site-Dependent Effects. Remote Sens. 2020, 12, 493. [Google Scholar] [CrossRef]
- Liu, J.; Huang, G.; Du, Y.; Bai, Z. Method and Application of Identifying Multipath Errors in GNSS Observation Data Based on Prior Information of Base Station’s Signal-to-noise Ratio. J. Earth Sci. Environ. 2022, 44, 352–362. [Google Scholar]
- Genrich, J.; Bock, Y. Rapid resolution of crustal motion at short ranges with the global positioning system. J. Geophys. Res. 1992, 97, 3261. [Google Scholar] [CrossRef]
- Choi, K.; Bilich, A.; Larson, K.; Axelrad, P. Modified sidereal filtering: Implications for high-rate GPS positioning. Geophys. Res. Lett. 2004, 31, 178–198. [Google Scholar] [CrossRef]
- Agnew, D.; Larson, K. Finding the repeat times of the GPS constellation. GPS Solut. 2007, 11, 71–76. [Google Scholar] [CrossRef]
- Chen, D.; Ye, S.; Liu, Y.; Liu, Z. Applied analysis of GPS multipath errors based on observation domain. Wuhan Daxue Xuebao (Xinxi Kexue Ban)/Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 147–151. [Google Scholar] [CrossRef]
- Zheng, D.; Zhong, P.; Ding, X.; Chen, W. Filtering GPS time-series using a Vondrak filter and cross-validation. J. Geod. 2005, 79, 363–369. [Google Scholar] [CrossRef]
- Dai, W.; Ding, X.; Jian, J.; Chen, Y.; Li, Z. EMD filter method and its application in GPS multipath. Acta Geod. Cartogr. Sin. 2006, 35, 321–327. [Google Scholar]
- Xue, Z. A Study of Key Technology for Dynamic Deformation Monitoring Using GNSS. Ph.D. Thesis, Information Engineering University, Zhengzhou, China, 2012. [Google Scholar]
- Luo, C.; Feng, W.; Ding, Y. GPS Multipath Correction Model Research Based on CEEMD. J. Geod. Geodyn. 2018, 38, 381–385. [Google Scholar]
- Tong, R. Research on GPS/BDS-3 Multipath Error Reduction Based on Combining Complete Ensemble Empirical Mode Decompositions with Adaptive Noise and Wavelet Transform. Mod. Inf. Technol. 2022, 6, 45–47+51. [Google Scholar]
- Chen, J.; Yue, J.; Liu, Z.; Zhu, S.; Chen, H. Blind source separation algorithm of generalized eigen-value decomposition based on reference signal and its application in BDS multipath. J. Chin. Inert. Technol. 2018, 26, 18–23. [Google Scholar]
- Yan, C.; Wang, Q.; Yang, G.; Zhang, H. EMD-RLS combination algorithm and its application in weakening BDS multipath error. J. Chin. Inert. Technol. 2019, 27, 190–198. [Google Scholar]
- Lu, C.; Kuang, C.; Yi, C.; Zhang, Z. Singular Spectrum Analysis Filter Method for Mitigation of GPS Multipath Error. Geomat. Inf. Sci. Wuhan Univ. 2015, 40, 924–931. [Google Scholar]
- Zhong, P.; Ding, X.; Zheng, D.; Chen, W.; Huang, D. Adaptive wavelet transform based on cross-validation method and its application to GPS multipath mitigation. GPS Solut. 2008, 12, 109–117. [Google Scholar] [CrossRef]
- Dai, W.; Huang, D.; Cai, C. Multipath mitigation via component analysis methods for GPS dynamic deformation monitoring. GPS Solut. 2014, 18, 417–428. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Q.; Huang, C. GNSS Multipath Error Correction Based on Empirical Wavelet Transform. Jgg 2020, 40, 1153–1157. [Google Scholar]
- Zhang, R.; Xiong, Y.; Lei, F. A Multipath Error Mitigation Method for GNSS Kinematic Single Epoch Positioning by Fusing Track Inspection Information. Geomat. Inf. Sci. Wuhan Univ. 2021, 46, 905. [Google Scholar] [CrossRef]
- Cao, T.; Li, Z.; Gou, H. Research on Least Squares Harmonic Estimation in Extracting the Multipath Effect of GNSS Coordinate Time Series. J. Geod. Geodyn. 2022, 42, 139–142. [Google Scholar]
- Yuan, R.; Xie, S.; Li, Z.; He, Z. Adaptive Fast Independent Component Analysis Methods for Mitigating Multipath Effects in GNSS Deformation Monitoring. J. Sens. 2022, 2022, 4604950. [Google Scholar] [CrossRef]
- Yin, H.; Gan, W.; Xiao, G. Modified Sidereal Filter and Its Effect on High-rate GPS Positioning. Geomat. Inf. Sci. Wuhan Univ. 2011, 36, 609–611+616. [Google Scholar]
- Zhong, P.; Ding, X.; Yuan, L.; Xu, Y.; Kwok, K.; Chen, Y. Sidereal filtering based on single differences for mitigating GPS multipath effects on short baselines. J. Geod. 2010, 84, 145–158. [Google Scholar] [CrossRef]
- Wang, M.; Wang, J.; Dong, D.; Li, H.; Han, L.; Chen, W. Comparison of Three Methods for Estimating GPS Multipath Repeat Time. Remote Sens. 2018, 10, 6. [Google Scholar] [CrossRef]
- Wang, M.; Wang, J.; Dong, D.; Chen, W.; Li, H.; Wang, Z. Advanced Sidereal Filtering for Mitigating Multipath Effects in GNSS Short Baseline Positioning. ISPRS Int. J. Geoinf. 2018, 7, 228. [Google Scholar] [CrossRef]
- Li, P.; Hu, Z.; Zhou, R.; Zhao, Q. The Multipath Mitigation Method Based on Observation Domain and Its Application in GNSS Real-Time Deformation Monitoring. J. Geod. Geodyn. 2018, 38, 840–845. [Google Scholar]
- Zhan, W.; He, X.; Jia, D.; Zhang, Z.; Zhang, Y. Mitigation of multipath effects in GPS and BDS positioning using window matching method based sidereal filtering. Acta Geod. Geophys. 2022, 57, 427–446. [Google Scholar] [CrossRef]
- Satirapod, C.; Rizos, C. Multipath mitigation by wavelet analysis for GPS base station applications. Surv. Rev. 2005, 38, 2–10. [Google Scholar] [CrossRef]
- El-Ghazouly, M. Assessment of wavelets analysis for carrier-phase multipath mitigation. Can. J. Earth Sci. 2009, 46, 627–636. [Google Scholar] [CrossRef]
- Yuan, G.; Xie, Y.; Yang, S.; Liang, H. Multipath parameters estimation of weak GPS signal based on new colored noise unscented Kalman filter. In Proceedings of the IEEE International Conference on Information & Automation, Harbin, China, 20–23 June 2010. [Google Scholar]
- Zhang, Q.; Yang, W.; Zhang, S.; Liu, X. Characteristics of BeiDou Navigation Satellite System Multipath and Its Mitigation Method Based on Kalman Filter and Rauch-Tung-Striebel Smoother. Sensors 2018, 18, 198. [Google Scholar] [CrossRef] [PubMed]
- Lau, L. Wavelet packets based denoising method for measurement domain repeat-time multipath filtering in GPS static high-precision positioning. GPS Solut. 2017, 21, 461–474. [Google Scholar] [CrossRef]
- Su, M.; Feng, W.; Qiao, L.; Qiu, Z.; Zhang, H.; Zheng, J.; Yang, Y. An improved time-domain multipath mitigation method based on the constraint of satellite elevation for low-cost single frequency receiver. Adv. Space Res. Off. J. Comm. Space Res. (COSPAR) 2022, 69, 3597–3608. [Google Scholar] [CrossRef]
- Wu, X.; Zhou, J.; Wang, G.; Hu, X.; Cao, Y. Multipath error detection and correction for GEO/IGSO satellites. Sci. China Phys. Mech. Astron. 2012, 55, 1297–1306. [Google Scholar] [CrossRef]
- Ye, S.; Chen, D.; Liu, Y.; Jiang, P.; Tang, W.; Xia, P. Carrier phase multipath mitigation for BeiDou navigation satellite system. GPS Solut. 2015, 19, 545–557. [Google Scholar] [CrossRef]
- Ye, S.; Zhao, L.; Chen, D.; Pan, X.; Du, Z.; Li, Z. Real-time deformation monitoring data processing based on BDS triple-frequency observations. Geomat. Inf. Sci. Wuhan Univ. 2016, 41, 722–728. [Google Scholar] [CrossRef]
- Shi, Q.; Dai, W.; Zeng, F.; Zhang, C. The Characteristics of BDS Carrier Phase Multipath and Its Effects on Static Baseline Solution. J. Geod. Geodyn. 2016, 36, 874–878. [Google Scholar]
- Xie, B.; Hu, Z. Sidereal Filtering Method Based on Coordinate Domain and Its Application in BeiDou Deformation Monitoring. J. Geomat. 2023, 48, 27–31. [Google Scholar] [CrossRef]
- Yang, W.; Zhang, Q.; Ma, X. Strategy for BDS multipath mitigation based on wavelet decomposition and sidereal filter. J. Henan Polytech. Univ. (Nat. Sci.) 2022, 41, 58–64. [Google Scholar]
- Zhang, Z.; Dong, Y.; Wen, Y.; Luo, Y. Modeling, refinement and evaluation of multipath mitigation based on the hemispherical map in BDS2/BDS3 relative precise positioning. Measurement 2023, 213, 112722. [Google Scholar] [CrossRef]
- Hu, M.; Yao, Y.; Ge, M.; Neitzel, F.; Shi, J.; Pan, P.; Yang, M. Random walk multipath method for Galileo real-time phase multipath mitigation. GPS Solut. 2023, 27, 58. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, Z.; Lin, M.; Li, K. Modelling and mitigation of GNSS multipath effects by least-squares collocation considering spatial autocorrelation. J. Geod. 2023, 97, 37. [Google Scholar] [CrossRef]
- Ragheb, A.; Clarke, P.; Edwards, S. GPS sidereal filtering: Coordinate- and carrier-phase-level strategies. J. Geod. 2007, 81, 325–335. [Google Scholar] [CrossRef]
- Cohen, C.; Parkinson, B. Mitigating multipath error in GPS based attitude determination. In Proceedings of the Guidance & Control, Keystone, CO, USA, 2–6 February 1991. [Google Scholar]
- Fuhrmann, T.; Luo, X.; Knopfler, A.; Mayer, M. Generating statistically robust multipath stacking maps using congruent cells. GPS Solut. 2015, 19, 83–92. [Google Scholar] [CrossRef]
- Dong, D.; Wang, M.; Chen, W.; Zeng, Z.; Song, L.; Zhang, Q.; Cai, M.; Cheng, Y.; Lv, J. Mitigation of multipath effect in GNSS short baseline positioning by the multipath hemispherical map. J. Geod. 2016, 90, 255–262. [Google Scholar] [CrossRef]
- Cai, M.; Chen, W.; Dong, D.; Song, L.; Wang, M.; Wang, Z.; Zhou, F.; Zheng, Z.; Yu, C. Reduction of Kinematic Short Baseline Multipath Effects Based on Multipath Hemispherical Map. Sensors 2016, 16, 1677. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Chen, W.; Dong, D.; Wang, M.; Cai, M.; Yu, C.; Zheng, Z.; Liu, M. Multipath mitigation based on trend surface analysis applied to dual-antenna receiver with common clock. GPS Solut. 2019, 23, 104. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, W.; Dong, D.; Zhang, C.; Zheng, Z. An Advanced Multipath Mitigation Method Based on Trend Surface Analysis. Remote Sens. 2020, 12, 3601. [Google Scholar] [CrossRef]
- Zheng, K.; Zhang, X.; Li, P.; Li, X.; Ge, M.; Guo, F.; Sang, J.; Schuh, H. Multipath extraction and mitigation for high-rate multi-GNSS precise point positioning. J. Geod. 2019, 93, 2037–2051. [Google Scholar] [CrossRef]
- Wang, Y.; Zou, X.; Tang, W.; Cui, J.; Li, Y. A method for mitigating GNSS multipath effect based on multi-point hemispherical grid model. Acta Geod. Cartogr. Sin. 2020, 49, 461–468. [Google Scholar] [CrossRef]
- Zhang, R.; Gao, C.; Zhao, Q.; Peng, Z.; Shang, R. An Improved Multipath Mitigation Method and Its Application in Real-Time Bridge Deformation Monitoring. Remote Sens. 2021, 13, 2259. [Google Scholar] [CrossRef]
- Tang, L.; Liang, S. Research on multipath correction of observation range based on EEMD-MHM model. Hydrogr. Surv. Charting 2022, 42, 54–58+64. [Google Scholar]
- Liu, J.; Cao, C. Development status and trend of global navigation satellite system. J. Navig. Position. 2020, 8, 1–8. [Google Scholar]
- Schaub, L. GPS Status and Modernization Progress: Service, Satellites, Control Segment, and Military GPS User Equipment. In Proceedings of the 31st International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018. [Google Scholar]
- Yu, J.; Meng, X.; Shao, X.; Yan, B.; Yang, L. Identification of dynamic displacements and modal frequencies of a medium-span suspension bridge using multimode GNSS processing. Eng. Struct. 2014, 81, 432–443. [Google Scholar] [CrossRef]
- Meng, X.; Dodson, A.; Roberts, G. Detecting bridge dynamics with GPS and triaxial accelerometers. Eng. Struct. 2007, 29, 3178–3184. [Google Scholar] [CrossRef]
- Xiao, Y.; Jiang, W.; Chen, H.; Yuan, P.; Xi, R. Research and Realization of Deformation Monitoring Algorithm with Millimeter Level Precision Based on BeiDou Navigation Satellite System. Acta Geod. Cartogr. Sin. 2016, 45, 16–21. [Google Scholar] [CrossRef]
- Li, M. Research on Multi-Gnss Precise Orbit Determination Theory and Application. Ph.D. Thesis, Wuhan University, Wuhan, China, 2011. [Google Scholar]
- Breuer, P.; Chmielewski, T.; Górski, P.; Konopka, E. Application of GPS technology to measurements of displacements of high-rise structures due to weak winds. J. Wind. Eng. Ind. Aerodyn. 2002, 90, 223–230. [Google Scholar] [CrossRef]
- Behr, J.; Hudnut, K.; King, N. Monitoring structural deformation at pacoima dam, california using continuous gps. In Proceedings of the 11th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1998), Nashville, TN, USA, 15–18 September 1998. [Google Scholar]
- Guo, B. Application of GPS Technology in Reservoir Dam Deformation Monitoring. Geomat. Spat. Inf. Technol. 2020, 43, 103–106. [Google Scholar]
- Hu, X.; Chen, S. The Application of GPS in Dam Deformation Observation. Shanxi Hydrotech. 2015, 4, 119–122. [Google Scholar]
- Niu, Y. Investigation of and Modal Parameter Identification Algorithm of Super High-Rise Buildings and Long-Span Bridges Based on GNSS Measurement. Ph.D. Thesis, Tianjin University, Tianjin, China, 2019. [Google Scholar]
- Kwon, D.; Kijewski-Correa, T.; Kareem, A. SmartSync: An integrated real-time monitoring and system identification platform for tall buildings. In Proceedings of the 5th World Conference on Structural Control and Monitoring, Tokyo, Japan, 12–14 July 2010. [Google Scholar]
- Ashkenazi, V.; Brown, C.; Roberts, G.; Evans, R.; Karuma, R. Monitoring of structures using the global positioning system. Struct. Build. 1999, 134, 97–105. [Google Scholar]
- Wang, L.; Zhang, Q.; Li, X.; Zhang, Y.; Guan, J.; Tu, R. Dynamic and real time deformation monitoring of landslide with GPS-RTK Technology. J. Eng. Geol. 2011, 19, 193–198. [Google Scholar]
- Zeng, Z. Modeling on Static Multipath in Short Baseline by Using Two Antennae with Share Clock in One Receiver. Master’s Thesis, East China Normal University, Shanghai, China, 2015. [Google Scholar]
- Wu, H. Research on Identification and Early Warning Methods of Deformation Information in GNSS Time Series. Master’s Thesis, Anhui University of Science and Technology, Huainan, China, 2019. [Google Scholar]
- Wang, D.; Meng, X.; Gao, C.; Pan, S.; Chen, Q. Multipath Extraction and Mitigation for Bridge Deformation Monitoring Using A Single-difference Model. Adv. Space Res. 2017, 60, 2882–2895. [Google Scholar] [CrossRef]
- Han, J.Q.; Huang, G.W.; Li, Z. Multipath effect analysis and processing method of gnss landslide monitoring under complicated environment. J. Earth Sci. Environ. 2018, 40, 355–362. [Google Scholar]
- Chen, D.; Ye, S.; Xia, F.; Cheng, X.; Zhang, H.; Jiang, W. A multipath mitigation method in long-range RTK for deformation monitoring. GPS Solut. 2022, 26, 96. [Google Scholar] [CrossRef]
- Liu, T.; He, X.; Jia, D.; Zhan, W. Application of Sidereal Filtering in Observation Domain in Deformation Monitoring of High Speed Railway Subgrade. J. Navig. Position. 2023, 11, 39–47. [Google Scholar]
- Tong, R.F.; Liu, C.; Tao, Y.; Fan, Y.; Chen, J. Deformation Information Extraction from Multi-GNSS Coordinate Series Based on EWT-ICA-R. Sustainability 2023, 15, 4578. [Google Scholar] [CrossRef]
- Huang, S.; Li, P.; Yang, B.; Xiang, D. Characteristics of Multipath Effects in GPS Dynamic Deformation Monitoring. Geo-Spat. Inf. Sci. 2006, 9, 79–83. [Google Scholar] [CrossRef][Green Version]
- Groves, P.; Jiang, Z.; Lei, W.; Ziebart, M. Intelligent Urban Positioning using Multi-Constellation GNSS with 3D Mapping and NLOS Signal Detection. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, TN, USA, 17–21 September 2012. [Google Scholar]
- Xu, B.; Zhang, S.; Kuang, K.; Li, X. A unified cycle-slip, multipath estimation, detection and mitigation method for VIO-aided PPP in urban environments. GPS Solut. 2023, 27, 59. [Google Scholar] [CrossRef]
- Lu, R.; Chen, W.; Zhang, C.; Li, L.; Peng, Y.; Zheng, Z. Characteristics of the BDS-3 multipath effect and mitigation methods using precise point positioning. GPS Solut. 2022, 26, 41. [Google Scholar] [CrossRef]
- Wang, Z. Research on GPS Multipath Effect Correction Technology in Urban Environment. Ph.D. Thesis, East China Normal University, Shanghai, China, 2020. [Google Scholar]
- Dong, Y. Research on Correction Method of Pseudorange Multipath in Urban Area. Master’s Thesis, East China Normal University, Shanghai, China, 2019. [Google Scholar]
- Zou, X.; Fu, R.; Wang, Y.; Li, Z.; Xu, Z.; Tang, W.; Li, Y. Inversion of GNSS Multipath Effects Around the Stations and Its Applications. Geomat. Inf. Sci. Wuhan Univ. 2022, 47, 1416–1421. [Google Scholar] [CrossRef]
- Chai, Y.; Ou, J.; Yuan, Y. Overview of Data Processing for BDS/GNSS Precise Positioning. Front. Data Comput. 2022, 4, 25–33. [Google Scholar]
- Kim, O.; Kee, C. Wavelet and Neural Network-Based Multipath Detection for Precise Positioning Systems. Mathematics 2023, 11, 1400. [Google Scholar] [CrossRef]
- Xu, X.; Tao, Y. BDS multipath errors reducing method based on EMD-LSTM coupled prediction model. J. Indian Soc. Remote 2020, 45, 98–104. [Google Scholar]
- Tao, Y.; Liu, C.; Liu, C.; Zhao, X.; Xin, H. Joint time–frequency mask and convolutional neural network for real-time separation of multipath in GNSS deformation monitoring. GPS Solut. 2021, 25, 25. [Google Scholar] [CrossRef]
- Gong, J.; Ma, R.; Li, D.; Zhao, J. GNSS multipath mitigation method based on k-means classification in urban environment. J. Indian Soc. Remote Sens. 2022, 50, 805–813. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Method | Year | Scholar |
|---|---|---|---|
| Antenna method | Choke ring technology | 1998 | Filippov [18] |
| Compression wheel antenna technology | 2001 | Krantz [20] | |
| Dual-polarized antenna technique | 2010 | Groves [22] | |
| Cross-plate reflection planes | 2013 | Maqsood [23] | |
| Single orthogonal dual-polarized GNSS antenna | 2017 | Zhang [24] | |
| Receiver method | Narrow spatial correlator technique | 1992 | Dieredonck [27] |
| Multipath elimination delay-locked loop technology | 2002 | Nee [25] | |
| Group-delay multiple amplitude phase-locked loop technology | 2013 | Chen [26] | |
| New ranging code tracking loop | 2022 | Qiu [28] |
| Model Type | Contributions | Year | Scholar |
|---|---|---|---|
| C/N0 | Construction of the SIGMA-Δ model based on C/N0 | 1999 | Brunner [29] |
| dual-frequency C/N0 | 2019 | Zhang [35] | |
| SNR | Validation of the effectiveness of the SNR method to | 2003 | Zhang [30] |
| refine a stochastic model for GPS | 2003 | Liu [31] | |
| Elevation | Refined stochastic model for multi-GNSS | 2020 | Xi [36] |
| real-time adaptive weighting model | 2018 | Zhang [34] |
| Orbit Type | Repeat Period | |
|---|---|---|
| GPS | MEO | 1 day |
| BDS | GEO | 1 day |
| IGGSO | 1 day | |
| MEO | 7 days | |
| GLONASS | MEO | 8 days |
| Galileo | MEO | 10 days |
| Method | Scenario | System | Year | Scholar |
|---|---|---|---|---|
| Multipath spherical harmonic model | Baseline positioning | GPS | 1991 | Cohen [78] |
| MPS | PPP | GNSS | 2015 | Fuhrmann [79] |
| MHM | Baseline positioning | GNSS | 2016 | Dong [80] |
| T-MHM | Baseline positioning, PPP | GNSS | 2019 | Wang [82] |
| M-MHM | PPP | GNSS | 2019 | Zheng [84] |
| MHGM | Baseline positioning | GPS | 2020 | Wang [85] |
| AT-MHM | Baseline positioning, PPP | GNSS | 2020 | Wang [83] |
| Type | Method | Experimental Scene | System | Year | Scholar |
|---|---|---|---|---|---|
| Coordinate domain | CVVF | Baseline positioning | GPS | 2005 | Zheng [42] |
| EMD | Baseline positioning | GPS | 2006 | Dai [43] | |
| Wavelet signal-layer automatic identification | Baseline positioning | GPS | 2008 | Zhong [50] | |
| EEMD | Baseline positioning | GPS | 2012 | Xue [44] | |
| PCA-EMD-ICA-R | Baseline positioning | GPS | 2014 | Dai [51] | |
| SSA | Baseline positioning | GPS | 2015 | Lu [49] | |
| CEEMD | Baseline positioning | GPS | 2018 | Luo [45] | |
| GED | Baseline positioning | BDS | 2018 | Chen [47] | |
| EMD-RLS | Baseline positioning | BDS | 2019 | Yan [48] | |
| EWT | Baseline positioning | GPS | 2020 | Luo [52] | |
| Wavelet analysis | Baseline positioning | GPS | 2021 | Zhang [53] | |
| Least-squares harmonic estimation | Baseline positioning | GNSS | 2022 | Cao [54] | |
| AF-ICA | Baseline positioning | GNSS | 2022 | Yuan [55] | |
| CEEMDAN-WT | Baseline positioning | GPS, BDS | 2022 | Tong [46] | |
| Observation domain | Wavelet analysis | Baseline positioning | GPS | 2005 | Satirapod [62] |
| Wavelet detrending technique | Baseline positioning | GPS | 2009 | El-Ghazouly [63] | |
| SF based on single differences | Baseline positioning | GNSS | 2010 | Zhong [57] | |
| Three-level wavelet packet-based denoising method | Baseline positioning | GPS | 2017 | Lau [66] | |
| KF-RTSS | Baseline positioning | BDS | 2018 | Zhang [65] | |
| MHM_V | Baseline positioning | GPS | 2021 | Zhang [86] | |
| MHM based on EEMD | Baseline positioning | GNSS | 2022 | Tang [87] | |
| SF based on EC wavelet packet transform | Baseline positioning | GNSS | 2022 | Su [67] | |
| SF-based sym6 wavelet decomposition | Baseline positioning | BDS | 2022 | Yang [73] | |
| Window-matching method based on SF | Baseline positioning | GPS, BDS | 2022 | Zhan [61] | |
| RWM | Baseline positioning | Galileo | 2023 | Hu [75] | |
| LSC | Baseline positioning, PPP | GPS, Galileo | 2023 | Tian [76] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Zhang, L.; Sun, A.; Meng, X.; Zhao, D.; Hancock, C. GNSS Carrier-Phase Multipath Modeling and Correction: A Review and Prospect of Data Processing Methods. Remote Sens. 2024, 16, 189. https://doi.org/10.3390/rs16010189
Zhang Q, Zhang L, Sun A, Meng X, Zhao D, Hancock C. GNSS Carrier-Phase Multipath Modeling and Correction: A Review and Prospect of Data Processing Methods. Remote Sensing. 2024; 16(1):189. https://doi.org/10.3390/rs16010189
Chicago/Turabian StyleZhang, Qiuzhao, Longqiang Zhang, Ao Sun, Xiaolin Meng, Dongsheng Zhao, and Craig Hancock. 2024. "GNSS Carrier-Phase Multipath Modeling and Correction: A Review and Prospect of Data Processing Methods" Remote Sensing 16, no. 1: 189. https://doi.org/10.3390/rs16010189
APA StyleZhang, Q., Zhang, L., Sun, A., Meng, X., Zhao, D., & Hancock, C. (2024). GNSS Carrier-Phase Multipath Modeling and Correction: A Review and Prospect of Data Processing Methods. Remote Sensing, 16(1), 189. https://doi.org/10.3390/rs16010189