
An Automatic Hierarchical Clustering Method for the LiDAR Point Cloud Segmentation of Buildings via Shape Classification and Outliers Reassignment


 , , ,
, , ,
Abstract
1. Introduction
- (1)
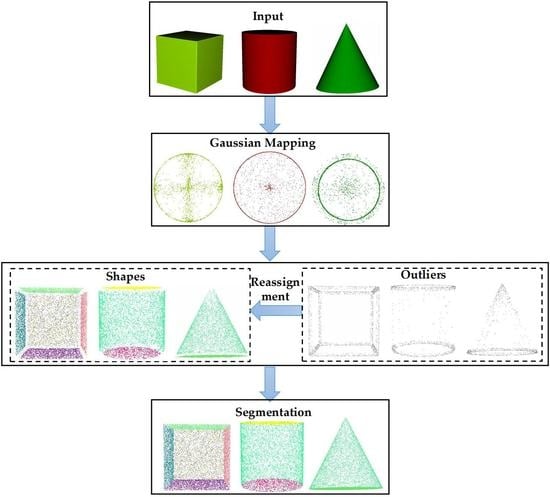
- A novel framework for building segmentation via shape classification and outliers reassignment is presented.
- (2)
- A coarse segmentation method based on a combination of Gaussian mapping and DBSCAN is developed. The plane, cone, cylinder, and sphere structures that make up the target are identified based on the morphological differences of different shape primitives presented in Gaussian spherical space.
- (3)
- A fine segmentation based on the BIP models is proposed. The complete segmentation is achieved by the constructed minimum energy function, which reassigns the outlier points to each recognized primitive.
2. Related Works
2.1. Region Growing
2.2. Model Fitting
2.3. Clustering
2.4. Hierarchical Clustering
3. Methods
3.1. Overview of the Proposed Approach
3.2. Coarse Segmentation
- (1)
- The DBSCAN algorithm is executed in the Gaussian sphere space to obtain multiple clusters ς = {G1, G2, …, Gi};
- (2)
- For a cluster Gi, a spatial resampling is performed with an interval of 0.01 m, and then a point in Gi is selected and searched for points within the radius of r/2;
- (3)
- After calculating the eigenvalues of the searched points, if all three eigenvalues are less than 1, Gi is a spot, and the corresponding point groups in the 3D point cloud space are marked as planes. Then, the shape features are derived using Equation (1); if Pλ < Lλ, Lλ is linear, its radius is calculated. If the radius is 1 m, the corresponding points groups in the 3D point cloud space are marked as cylinders. If the radius is less than 1 m, those groups are marked as cones. Note that when Gi is judged to be linear, this cluster may contain another spot cluster, as shown in Figure 3. The generated local highlight phenomenon is evident in the circle of Figure 3c, so we count the average value of NN for the core points in Gi. If the NN of the core point is larger than the average value, it and its neighbors are marked as local highlighting regions and selected as a new cluster;
- (4)
- The 3D spherical surface is also presented as a uniformly distributed spherical structure in the Gaussian sphere space. Thus, for the points of the spherical surface, the NN of core points should be close. In the Gaussian sphere space, after excluding the identified points, the remaining points connected and have close NN values to each other are selected as clusters and marked as spherical shapes.

3.3. Fine Segmentation
3.3.1. Shape Parameterization
Planes
Cylinder
Cone and Sphere
3.3.2. Outlier Reassignment
Fitting
Connectivity
Consistency
4. Experiments and Discussion
4.1. Evaluation Metrics
4.2. Experiments on Synthetic Data
4.3. Experiments on Real Point Cloud Datasets
4.3.1. Qualitative Evaluations
4.3.2. Quantitative Evaluations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, G.; Zhou, X.; Song, Y.; Xie, D.; Wang, L.; Yan, G.; Hu, M.; Liu, B.; Shang, W.; Gong, C.; et al. Design of supercontinuum laser hyperspectral light detection and ranging (LiDAR) (SCLaHS LiDAR). Int. J. Remote Sens. 2021, 42, 3731–3755. [Google Scholar] [CrossRef]
- Chen, R.; Han, S.; Xu, J.; Su, H. Visibility-aware point-based multi-view stereo network. IEEE T Pattern. Anal. 2020, 43, 3695–3708. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Song, N.; Sun, F.; Liu, X.; Wang, R.; Yao, J.; Cao, S. Point2Roof: End-to-end 3D building roof modeling from airborne LiDAR point clouds. ISPRS J. Photogramm. 2022, 193, 17–28. [Google Scholar] [CrossRef]
- Huang, J.; Stoter, J.; Peters, R.; Nan, L. City3D: Large-Scale Building Reconstruction from Airborne LiDAR Point Clouds. Remote Sens. 2022, 14, 2254. [Google Scholar] [CrossRef]
- Li, Y.; Ibanez-Guzman, J. Lidar for Autonomous Driving: The Principles, Challenges, and Trends for Automotive Lidar and Perception Systems. IEEE Signal Proc. Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Nwakanma, C.I.; Islam, F.B.; Maharani, M.P.; Lee, J.; Kim, D. Detection and Classification of Human Activity for Emergency Response in Smart Factory Shop Floor. Appl. Sci. 2021, 11, 3662. [Google Scholar] [CrossRef]
- Xu, B.; Chen, Z.; Zhu, Q.; Ge, X.; Huang, S.; Zhang, Y.; Liu, T.; Wu, D. Geometrical Segmentation of Multi-Shape Point Clouds Based on Adaptive Shape Prediction and Hybrid Voting RANSAC. Remote Sens. 2022, 14, 2024. [Google Scholar] [CrossRef]
- Xie, Y.; Tian, J.; Zhu, X.X. Linking Points with Labels in 3D: A Review of Point Cloud Semantic Segmentation. IEEE Geosci. Remote Sens. Mag. 2020, 8, 38–59. [Google Scholar] [CrossRef]
- Barnefske, E.; Sternberg, H. Evaluating the Quality of Semantic Segmented 3D Point Clouds. Remote Sens. 2022, 14, 446. [Google Scholar] [CrossRef]
- Liang, X.; Fu, Z.; Sun, C.; Hu, Y. MHIBS-Net: Multiscale hierarchical network for indoor building structure point clouds semantic segmentation. Int. J. Appl. Earth Obs. 2021, 102, 102449. [Google Scholar] [CrossRef]
- Wang, F.; Hu, H.; Ge, X.; Xu, B.; Zhong, R.; Ding, Y.; Xie, X.; Zhu, Q. Multientity Registration of Point Clouds for Dynamic Objects on Complex Floating Platform Using Object Silhouettes. IEEE Trans. Geosci. Remote Sens. 2021, 59, 769–783. [Google Scholar] [CrossRef]
- Sun, S.; Li, C.; Chee, P.W.; Paterson, A.H.; Jiang, Y.; Xu, R.; Robertson, J.S.; Adhikari, J.; Shehzad, T. Three-dimensional photogrammetric mapping of cotton bolls in situ based on point cloud segmentation and clustering. ISPRS J. Photogramm. 2020, 160, 195–207. [Google Scholar] [CrossRef]
- Nurunnabi, A.; Belton, D.; West, G. Robust Segmentation in Laser Scanning 3D Point Cloud Data. In Proceedings of the 2012 International Conference on Digital Image Computing Techniques and Applications (DICTA), Fremantle, Australia, 3–5 December 2012; pp. 1–8. [Google Scholar]
- Zhan, Q.; Liang, Y.; Xiao, Y. Color-based segmentation of point clouds. In Proceedings of the ISPRS Workshop Laserscanning ’09, Paris, France, 1–2 September 2009; pp. 248–252. [Google Scholar]
- Filin, S.; Pfeifer, N. Segmentation of airborne laser scanning data using a slope adaptive neighborhood. ISPRS J. Photogramm. 2006, 60, 71–80. [Google Scholar] [CrossRef]
- Vo, A.; Truong-Hong, L.; Laefer, D.F.; Bertolotto, M. Octree-based region growing for point cloud segmentation. ISPRS J. Photogramm. 2015, 104, 88–100. [Google Scholar] [CrossRef]
- Xu, Y.; Tong, X.; Stilla, U. Voxel-based representation of 3D point clouds: Methods, applications, and its potential use in the construction industry. Automat. Constr. 2021, 126, 103675. [Google Scholar] [CrossRef]
- Zhu, Q.; Wang, F.; Hu, H.; Ding, Y.; Xie, J.; Wang, W.; Zhong, R. Intact planar abstraction of buildings via global normal refinement from noisy oblique photogrammetric point clouds. ISPRS Int. J. Geo.-Inf. 2018, 7, 431. [Google Scholar] [CrossRef]
- Dong, Z.; Yang, B.; Hu, P.; Scherer, S. An efficient global energy optimization approach for robust 3D plane segmentation of point clouds. ISPRS J. Photogramm. 2018, 137, 112–133. [Google Scholar] [CrossRef]
- Ballard, D.H. Generalizing the Hough transform to detect arbitrary shapes. Pattern Recogn. 1981, 13, 111–122. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Xu, L.; Oja, E. Randomized Hough Transform (RHT): Basic Mechanisms, Algorithms, and Computational Complexities. CVGIP Image Underst. 1993, 57, 131–154. [Google Scholar] [CrossRef]
- Kiryati, N.; Eldar, Y.; Bruckstein, A.M. A probabilistic Hough transform. Pattern Recogn 1991, 24, 303–316. [Google Scholar] [CrossRef]
- Yla-Jaaski, A.; Kiryati, N. Adaptive termination of voting in the probabilistic circular Hough transform. IEEE Trans. Pattern Anal. 1994, 16, 911–915. [Google Scholar] [CrossRef]
- Galamhos, C.; Matas, J.; Kittler, J. Progressive probabilistic Hough transform for line detection. In Proceedings of the 1999 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Fort Collins, CO, USA, 23–25 June 1999; pp. 554–560. [Google Scholar]
- Widyaningrum, E.; Gorte, B.; Lindenbergh, R. Automatic Building Outline Extraction from ALS Point Clouds by Ordered Points Aided Hough Transform. Remote Sens. 2019, 11, 1727. [Google Scholar] [CrossRef]
- Romanengo, C.; Biasotti, S.; Falcidieno, B. Hough Transform for Detecting Space Curves in Digital 3D Models. J. Math. Imaging Vis. 2022, 64, 284–297. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, L.; Mathiopoulos, P.T.; Huang, X. A Methodology for Automated Segmentation and Reconstruction of Urban 3-D Buildings from ALS Point Clouds. IEEE J. Stars 2014, 7, 4199–4217. [Google Scholar] [CrossRef]
- Xu, B.; Jiang, W.; Shan, J.; Zhang, J.; Li, L. Investigation on the weighted ransac approaches for building roof plane segmentation from lidar point clouds. Remote Sens. 2016, 8, 5. [Google Scholar] [CrossRef]
- Canaz Sevgen, S.; Karsli, F. An improved RANSAC algorithm for extracting roof planes from airborne lidar data. Photogramm. Rec. 2020, 35, 40–57. [Google Scholar] [CrossRef]
- Wang, F.; Zhou, G.; Hu, H.; Wang, Y.; Fu, B.; Li, S.; Xie, J. Reconstruction of LoD-2 Building Models Guided by Façade Structures from Oblique Photogrammetric Point Cloud. Remote Sens. 2023, 15, 400. [Google Scholar] [CrossRef]
- Liu, H.; Song, R.; Zhang, X.; Liu, H. Point cloud segmentation based on Euclidean clustering and multi-plane extraction in rugged field. Meas. Sci. Technol. 2021, 32, 95106. [Google Scholar] [CrossRef]
- Filin, S. Surface classification from airborne laser scanning data. Comput. Geosci. 2004, 30, 1033–1041. [Google Scholar] [CrossRef]
- Nurunnabi, A.; West, G.; Belton, D. Outlier detection and robust normal-curvature estimation in mobile laser scanning 3D point cloud data. Pattern Recogn. 2015, 48, 1404–1419. [Google Scholar] [CrossRef]
- Morsdorf, F.; Meier, E.; Kötz, B.; Itten, K.I.; Dobbertin, M.; Allgöwer, B. LIDAR-based geometric reconstruction of boreal type forest stands at single tree level for forest and wildland fire management. Remote Sens. Environ. 2004, 92, 353–362. [Google Scholar] [CrossRef]
- Xiao, W.; Zaforemska, A.; Smigaj, M.; Wang, Y.; Gaulton, R. Mean Shift Segmentation Assessment for Individual Forest Tree Delineation from Airborne Lidar Data. Remote Sens. 2019, 11, 1263. [Google Scholar] [CrossRef]
- Zhang, P.; Li, J.; Yang, X.; Zhu, H. Semi-automatic extraction of rock discontinuities from point clouds using the ISODATA clustering algorithm and deviation from mean elevation. Int. J. Rock Mech. Min. 2018, 110, 76–87. [Google Scholar] [CrossRef]
- Hu, C.; Pan, Z.; Zhong, T. Leaf and wood separation of poplar seedlings combining locally convex connected patches and K-means++ clustering from terrestrial laser scanning data. J. Appl. Remote Sens. 2020, 14, 18502. [Google Scholar] [CrossRef]
- Hou, J.; Zhang, A.; Qi, N. Density peak clustering based on relative density relationship. Pattern Recogn. 2020, 108, 107554. [Google Scholar] [CrossRef]
- Xu, X.; Luo, M.; Tan, Z.; Zhang, M.; Yang, H. Plane segmentation and fitting method of point clouds based on improved density clustering algorithm for laser radar. Infrared Phys. Technol. 2019, 96, 133–140. [Google Scholar] [CrossRef]
- Zhao, J.; Dong, Y.; Ma, S.; Liu, H.; Wei, S.; Zhang, R.; Chen, X.; Teodoro, A.C. An Automatic Density Clustering Segmentation Method for Laser Scanning Point Cloud Data of Buildings. Math. Probl. Eng. 2019, 2019, 3026758. [Google Scholar] [CrossRef]
- Chen, X.; Wu, H.; Lichti, D.; Han, X.; Ban, Y.; Li, P.; Deng, H. Extraction of indoor objects based on the exponential function density clustering model. Inf. Sci. 2022, 607, 1111–1135. [Google Scholar] [CrossRef]
- Wang, C.; Ji, M.; Wang, J.; Wen, W.; Li, T.; Sun, Y. An Improved DBSCAN Method for LiDAR Data Segmentation with Automatic Eps Estimation. Sensors 2019, 19, 172. [Google Scholar] [CrossRef]
- Chen, H.; Liang, M.; Liu, W.; Wang, W.; Liu, P.X. An approach to boundary detection for 3D point clouds based on DBSCAN clustering. Pattern Recogn. 2022, 124, 108431. [Google Scholar] [CrossRef]
- Yao, W.; Hinz, S.; Stilla, U. Object extraction based on 3D-segmentation of LiDAR data by combining mean shift with normalized cuts: Two examples from urban areas. In Proceedings of the 2009 Joint Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009; pp. 1–6. [Google Scholar]
- Shahzad, M.; Zhu, X.X. Robust Reconstruction of Building Facades for Large Areas Using Spaceborne TomoSAR Point Clouds. IEEE Trans. Geosci. Remote 2015, 53, 752–769. [Google Scholar] [CrossRef]
- Dash, M.; Liu, H.; Scheuermann, P.; Tan, K.L. Fast hierarchical clustering and its validation. Data Knowl. Eng. 2003, 44, 109–138. [Google Scholar] [CrossRef]
- Xu, S.; Wang, R.; Wang, H.; Zheng, H. An Optimal Hierarchical Clustering Approach to Mobile LiDAR Point Clouds. IEEE Trans. Intell. Transp. 2020, 21, 2765–2776. [Google Scholar] [CrossRef]
- Jurado, J.M.; Cárdenas, J.L.; Ogayar, C.J.; Ortega, L.; Feito, F.R. Semantic segmentation of natural materials on a point cloud using spatial and multispectral features. Sensors 2020, 20, 2244. [Google Scholar] [CrossRef]
- Saxena, A.; Prasad, M.; Gupta, A.; Bharill, N.; Patel, O.P.; Tiwari, A.; Er, M.J.; Ding, W.; Lin, C. A review of clustering techniques and developments. Neurocomputing 2017, 267, 664–681. [Google Scholar] [CrossRef]
- Feng, C.; Taguchi, Y.; Kamat, V.R. Fast plane extraction in organized point clouds using agglomerative hierarchical clustering. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6218–6225. [Google Scholar]
- Li, L.; Yao, J.; Tu, J.; Liu, X.; Li, Y.; Guo, L. Roof plane segmentation from airborne LiDAR data using hierarchical clustering and boundary relabeling. Remote Sens. 2020, 12, 1363. [Google Scholar] [CrossRef]
- Lu, X.; Yao, J.; Tu, J.; Li, K.; Li, L.; Liu, Y. Pairwise linkage for point cloud segmentation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 201–208. [Google Scholar] [CrossRef]
- Kung, Y.; Huang, Y.; Chien, S. Efficient Surface Detection for Augmented Reality on 3D Point Clouds. In Proceedings of the 33rd Computer Graphics International, Heraklion, Greece, 28 June–1 July 2016; pp. 89–92. [Google Scholar]
- Zhang, C.; Zhang, K.; Ge, L.; Zou, K.; Wang, S.; Zhang, J.; Li, W. A method for organs classification and fruit counting on pomegranate trees based on multi-features fusion and support vector machine by 3D point cloud. Sci. Hortic. 2021, 278, 109791. [Google Scholar] [CrossRef]
- Schubert, E.; Sander, J.; Ester, M.; Kriegel, H.P.; Xu, X. DBSCAN revisited, revisited: Why and how you should (still) use DBSCAN. ACM Trans. Database Syst. 2017, 42, 1–21. [Google Scholar] [CrossRef]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for Point-Cloud Shape Detection. Comput. Graph. Forum. 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, X.; Zhang, Y.; Wan, Y.; Duan, Y. Robust 3-D Plane Segmentation From Airborne Point Clouds Based on Quasi-A-Contrario Theory. IEEE J. Stars 2021, 14, 7133–7147. [Google Scholar] [CrossRef]
- Rottensteiner, F.; Sohn, G.; Jung, J.; Gerke, M.; Baillard, C.; Benitez, S.; Breitkopf, U. The ISPRS Benchmark on urban object classification and 3D building reconstruction. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, I-3, 293–298. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Synthetic Dataset | Number of Points | Number of Shapes | Average Point Distance (m) |
|---|---|---|---|
| Cube | 12,000 | 6 | 0.04 |
| Cylinder | 7999 | 3 | 0.05 |
| Cone | 7993 | 2 | 0.03 |
| Pyramid | 10,000 | 5 | 0.03 |
| Hollow cube | 20,019 | 7 | 0.03 |
| Torus | 20,006 | 24 | 0.03 |
| Datasets | Areas | Sensors | Flying Height (m) | Acquired Date (Month, Year) | Number of Points | Number of Shapes | Average Point Distance (m) |
|---|---|---|---|---|---|---|---|
| #1 | Vaihingen | Leica ALS50 | 500 | 08, 2008 | 10,488 | 6 | 0.48 |
| #2 | Vaihingen | Leica ALS50 | 500 | 08, 2008 | 926 | 6 | 0.65 |
| #3 | Vaihingen | Leica ALS50 | 500 | 08, 2008 | 952 | 9 | 0.65 |
| #4 | Vaihingen | Leica ALS50 | 500 | 08, 2008 | 1412 | 8 | 0.7 |
| #5 | Vaihingen | Leica ALS50 | 500 | 08, 2008 | 3827 | 8 | 0.65 |
| #6 | Toronto | ALTM-Orion M | 650 | 02, 2009 | 44,094 | 36 | 0.6 |
| #7 | Toronto | ALTM-Orion M | 650 | 02, 2009 | 38,601 | 28 | 0.75 |
| #8 | Toronto | ALTM-Orion M | 650 | 02, 2009 | 12,574 | 9 | 0.8 |
| #9 | Toronto | ALTM-Orion M | 650 | 02, 2009 | 56,267 | 24 | 0.75 |
| #10 | Toronto | ALTM-Orion M | 650 | 02, 2009 | 59,053 | 10 | 0.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, F.; Zhou, G.; Xie, J.; Fu, B.; You, H.; Chen, J.; Shi, X.; Zhou, B. An Automatic Hierarchical Clustering Method for the LiDAR Point Cloud Segmentation of Buildings via Shape Classification and Outliers Reassignment. Remote Sens. 2023, 15, 2432. https://doi.org/10.3390/rs15092432
Wang F, Zhou G, Xie J, Fu B, You H, Chen J, Shi X, Zhou B. An Automatic Hierarchical Clustering Method for the LiDAR Point Cloud Segmentation of Buildings via Shape Classification and Outliers Reassignment. Remote Sensing. 2023; 15(9):2432. https://doi.org/10.3390/rs15092432
Chicago/Turabian StyleWang, Feng, Guoqing Zhou, Jiali Xie, Bolin Fu, Haotian You, Jianjun Chen, Xue Shi, and Bowen Zhou. 2023. "An Automatic Hierarchical Clustering Method for the LiDAR Point Cloud Segmentation of Buildings via Shape Classification and Outliers Reassignment" Remote Sensing 15, no. 9: 2432. https://doi.org/10.3390/rs15092432
APA StyleWang, F., Zhou, G., Xie, J., Fu, B., You, H., Chen, J., Shi, X., & Zhou, B. (2023). An Automatic Hierarchical Clustering Method for the LiDAR Point Cloud Segmentation of Buildings via Shape Classification and Outliers Reassignment. Remote Sensing, 15(9), 2432. https://doi.org/10.3390/rs15092432