
Accuracy Enhancement and Feature Extraction for GNSS Daily Time Series Using Adaptive CEEMD-Multi-PCA-Based Filter


Abstract
1. Introduction
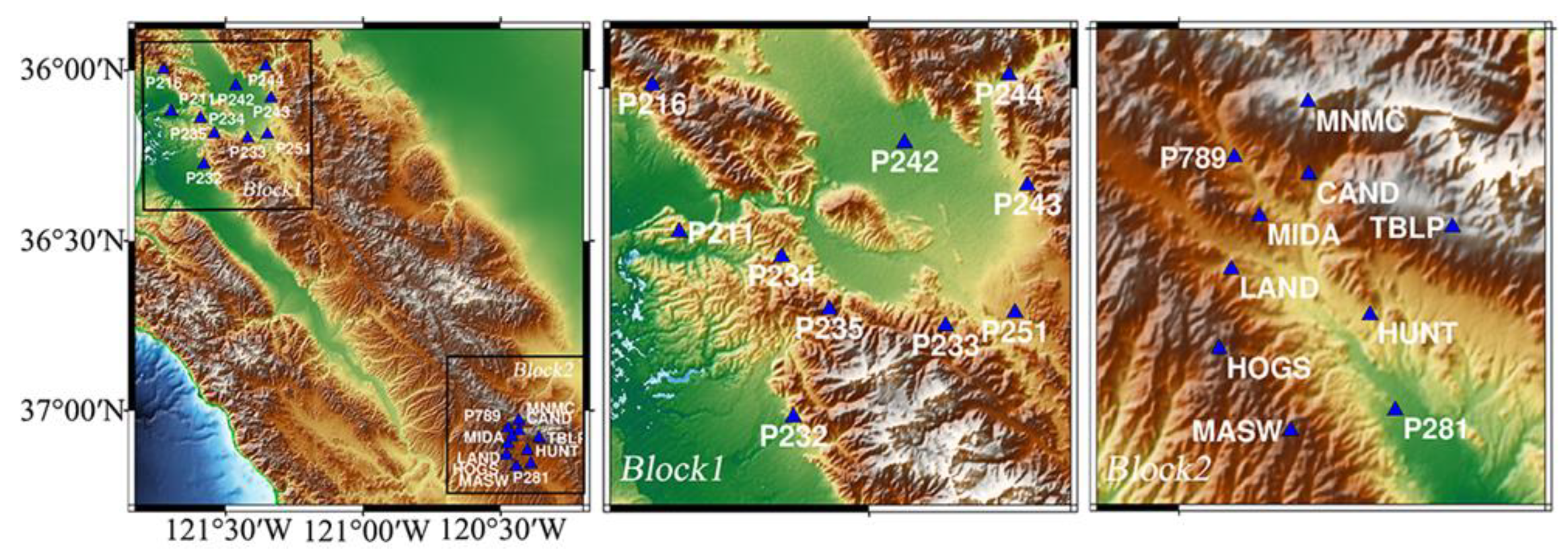
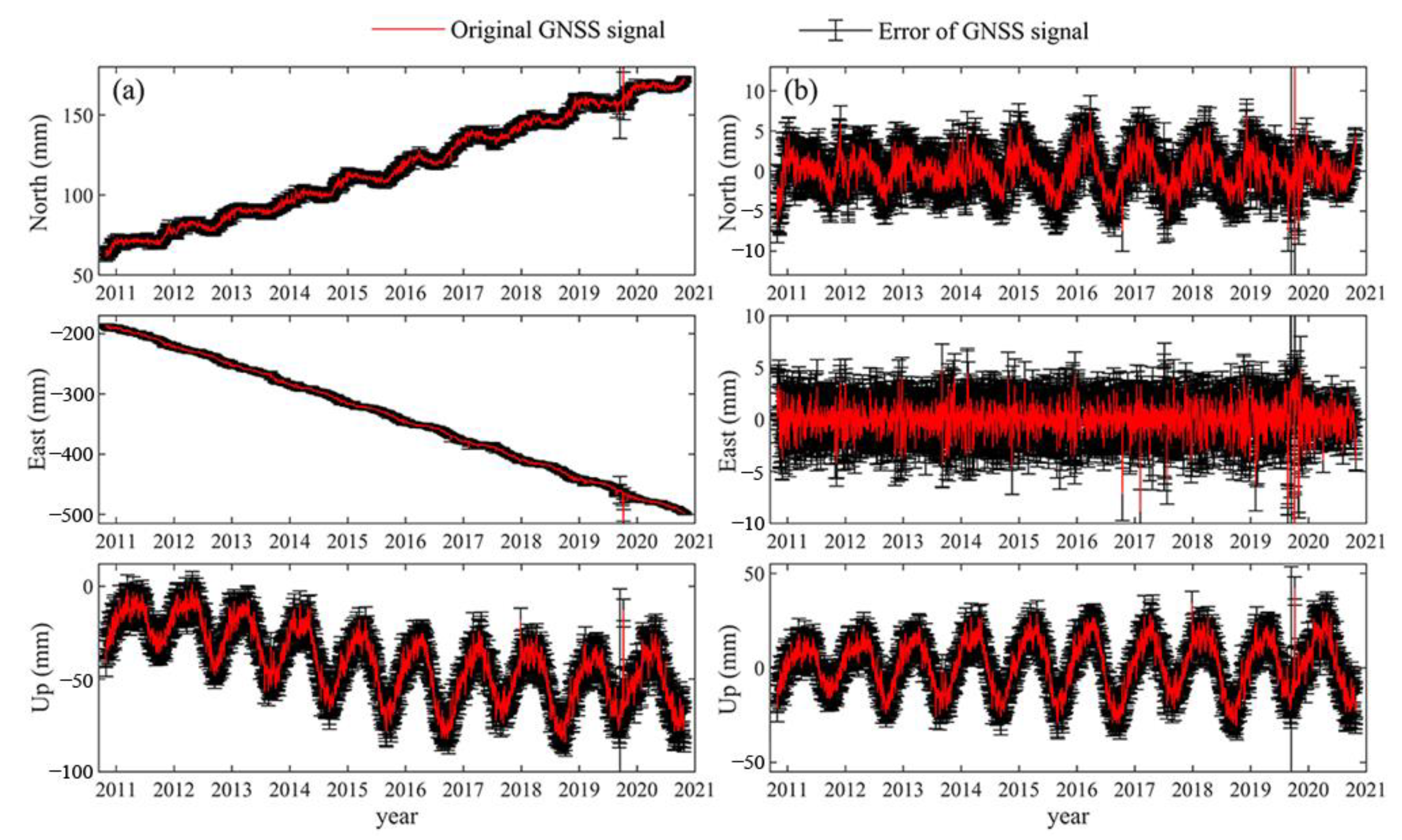
2. GNSS Daily Time Series and Preprocessing Procedure
3. Methods
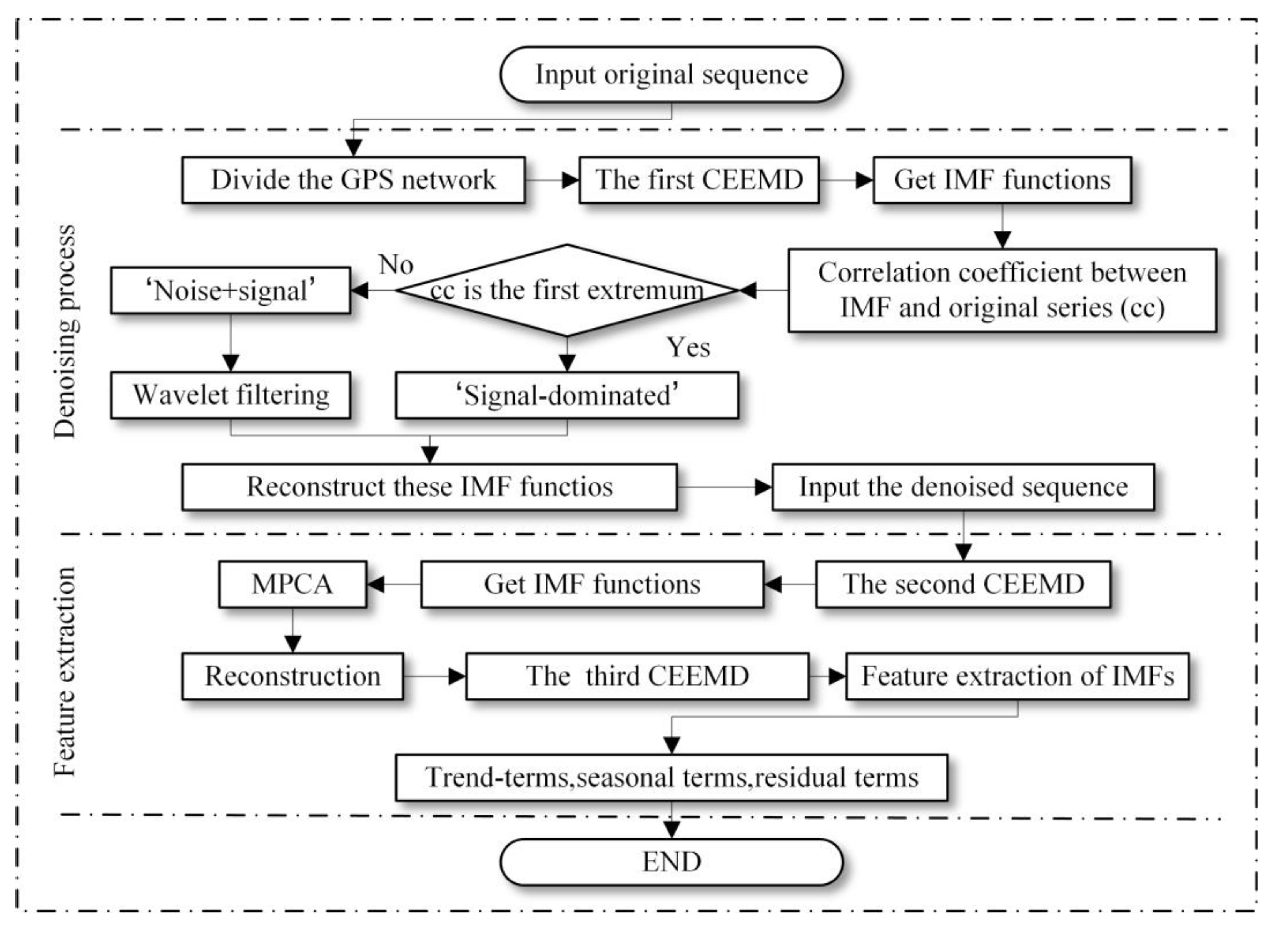
3.1. An Improved Denoising Method for GNSS Daily Time Series
- (i)
- The GNSS network is classified into several blocks based on the scale or range while considering the spatial distribution of the GNSS stations.
- (ii)
- The three-dimensional GNSS data matrix is converted into a two-dimensional GNSS data matrix ,, where n, m and q represent the number of epochs, selected station and coordinate directions of each site, respectively. The three coordinate components in order are N, E and U.
- (iii)
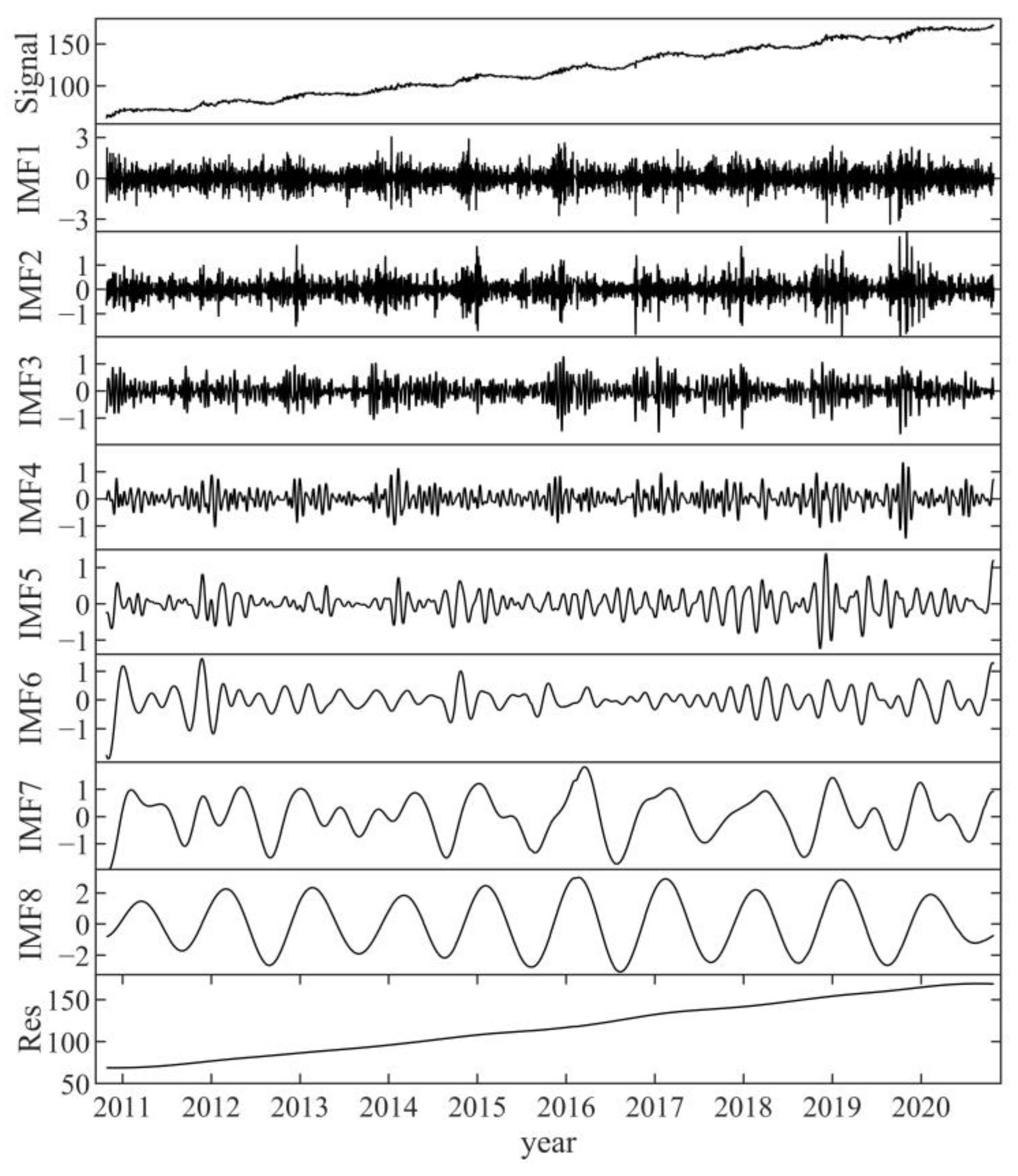
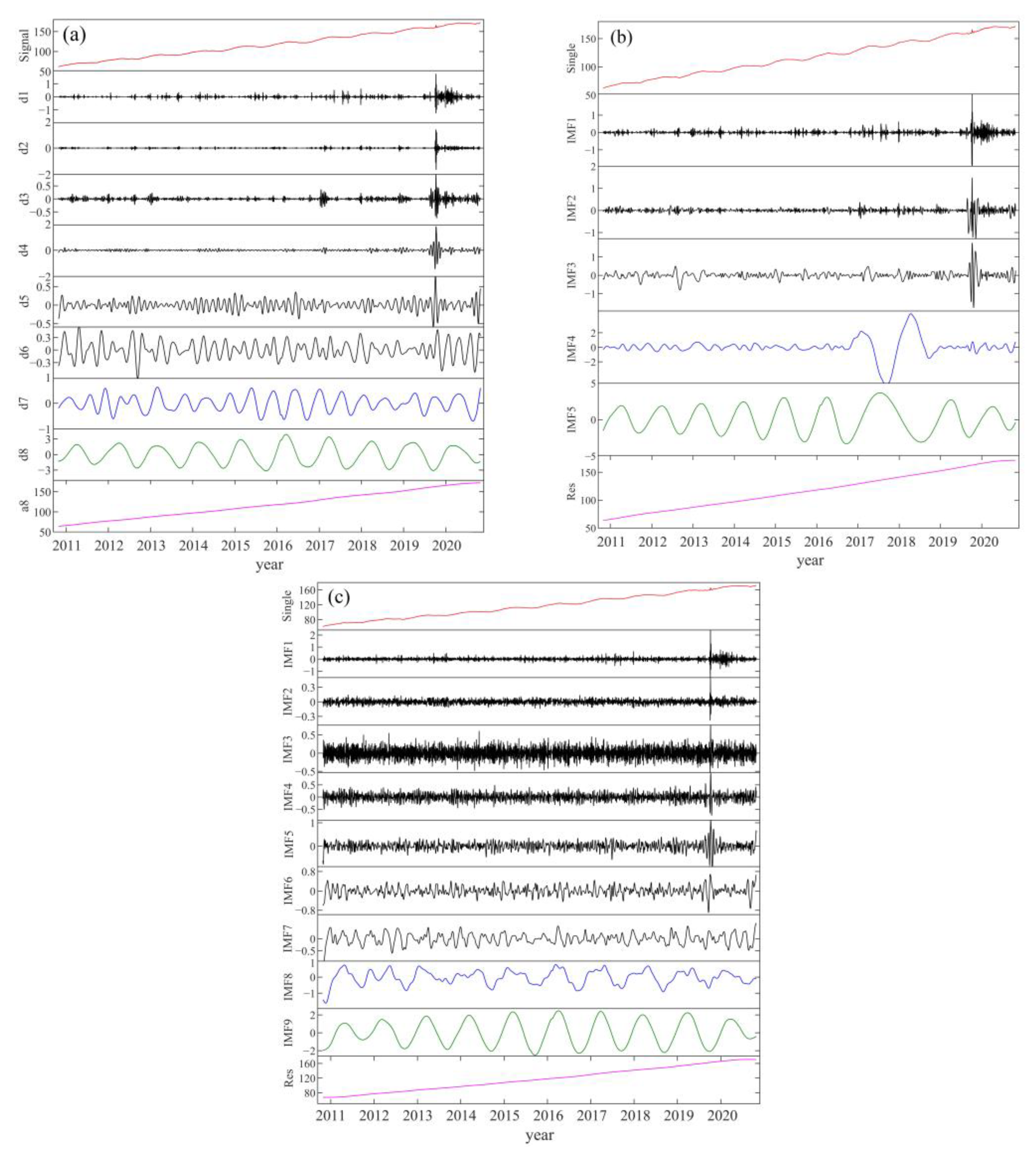
- Each column in matrix is adaptively decomposed into K IMFs based on the frequency level using the CEEMD method. , .
- (iv)
- The CCs between the raw residual time sequence and each IMF are calculated, and the corresponding matrix are obtained. Starting from , the IMF component corresponds to the first extreme value in the CCs, and the next IMF component is the transitional IMF.
- (v)
- The transition IMF (noise-dominant) and noise IMFs are combined into a new matrix , and each column of matrix is processed via wavelet denoising; subsequently, the new matrix is obtained after denoising.
- (vi)
- The denoised matrix and monochromatic IMFs are reconstructed to obtain a new matrix . MPCA is applied to matrix and the value of cumulative contribution rate (CCR) of the first k components is calculated.
- (vii)
- If the value of CCR exceeds 85%, then the top k components are selected as the denoised signals, and a new denoised matrix is reconstructed.
3.2. Feature Extraction of Seasonal and Trend Terms
4. Results and Analysis
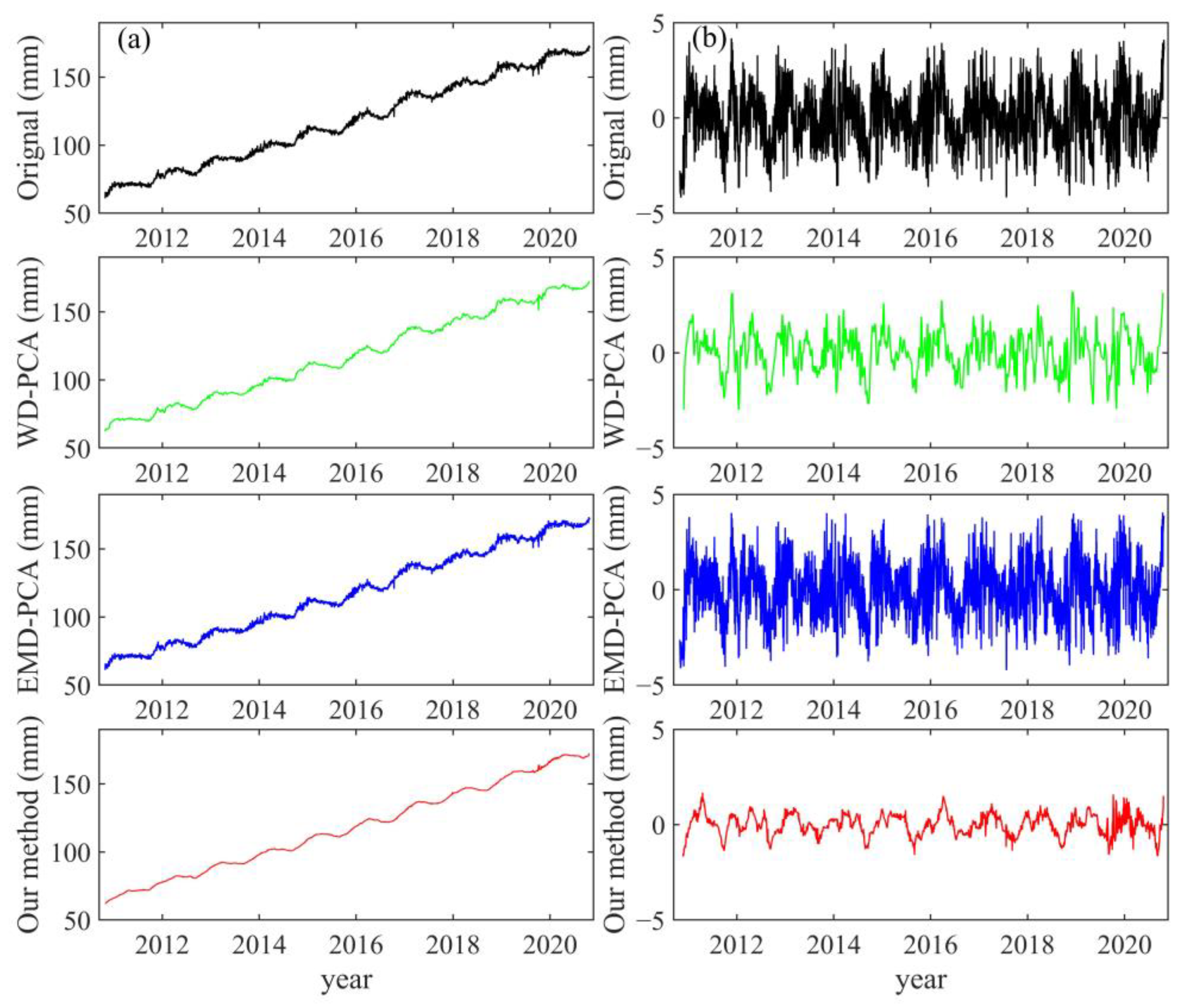
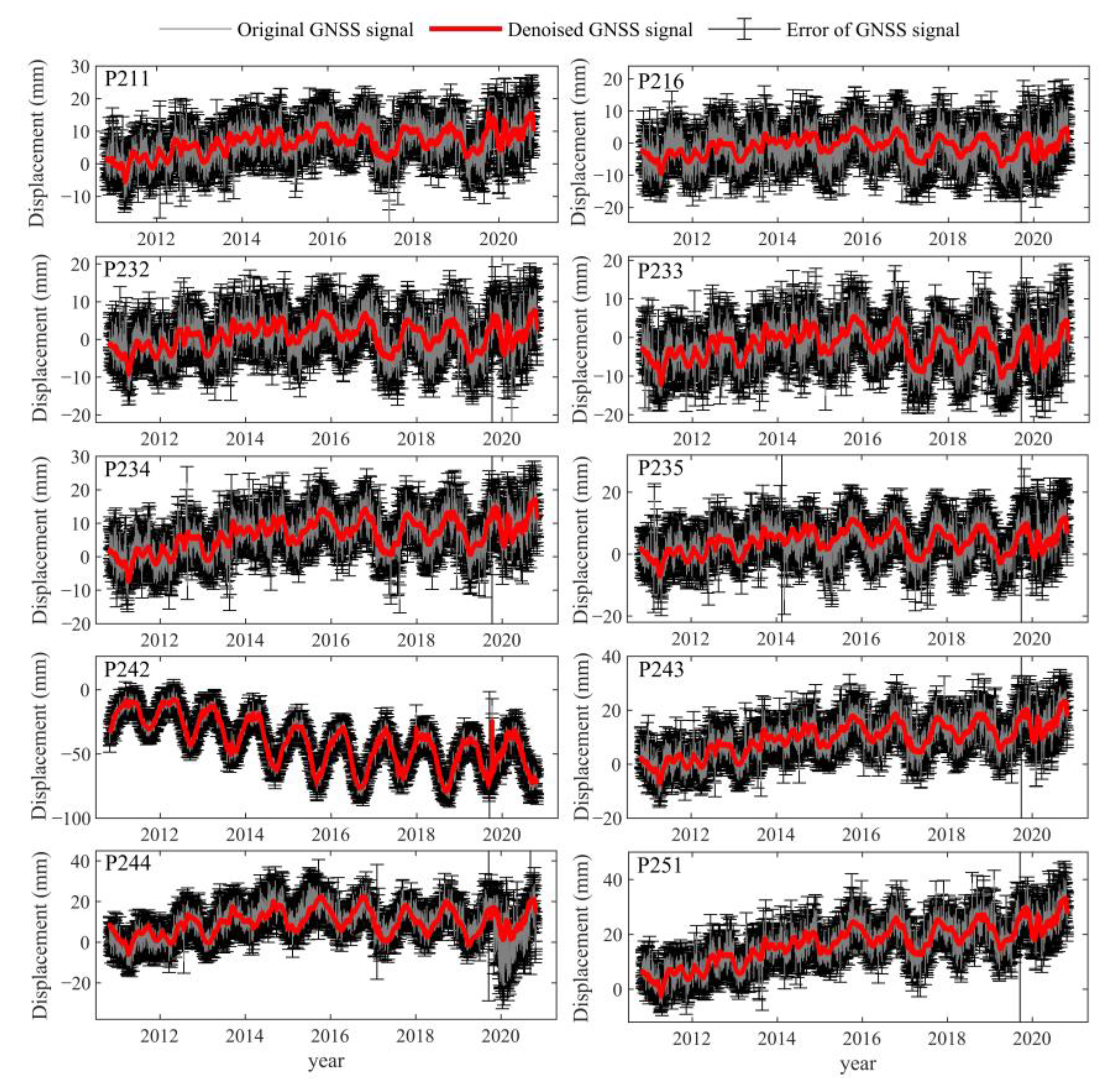
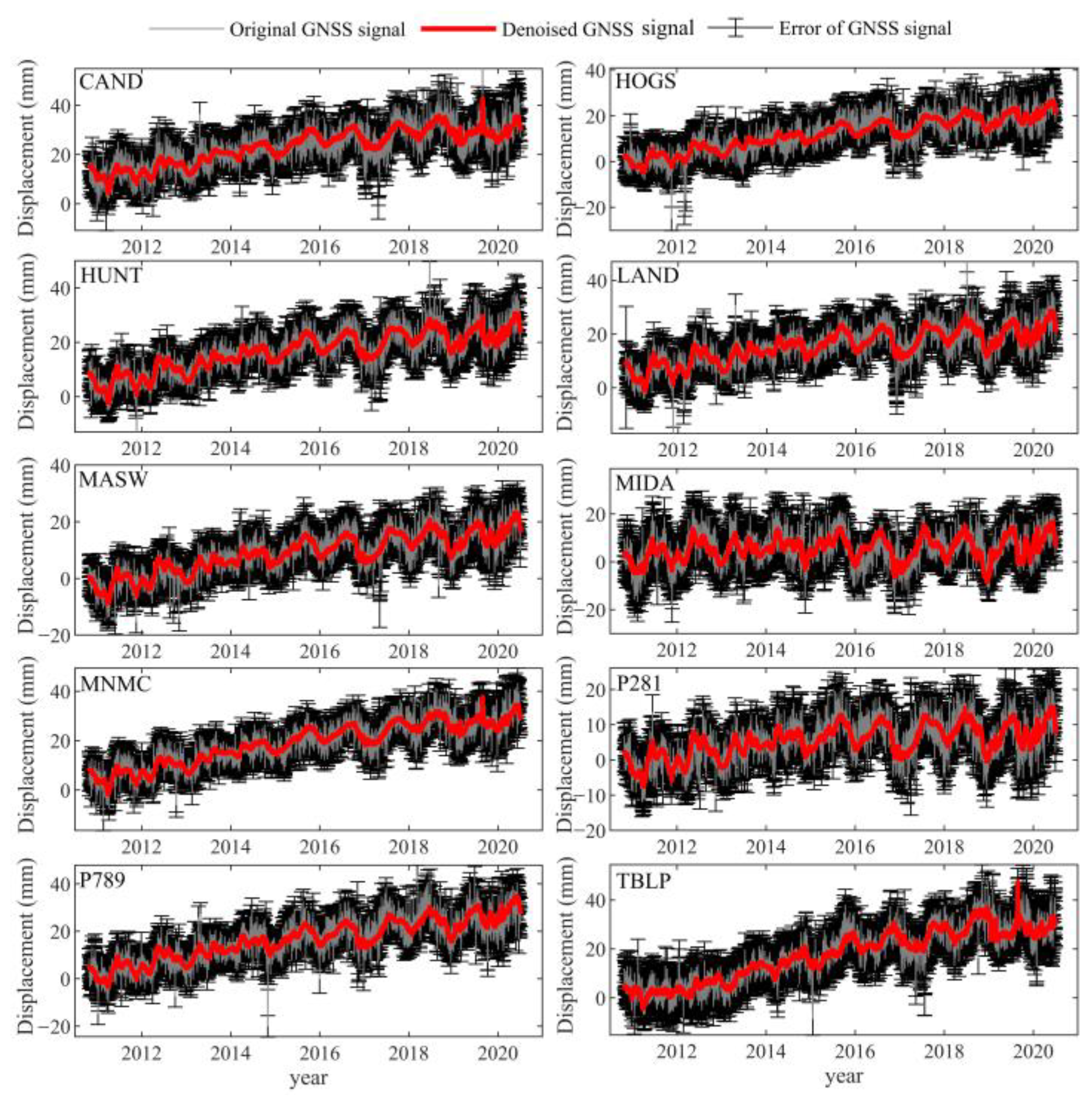
4.1. Results of GNSS Denoised Data
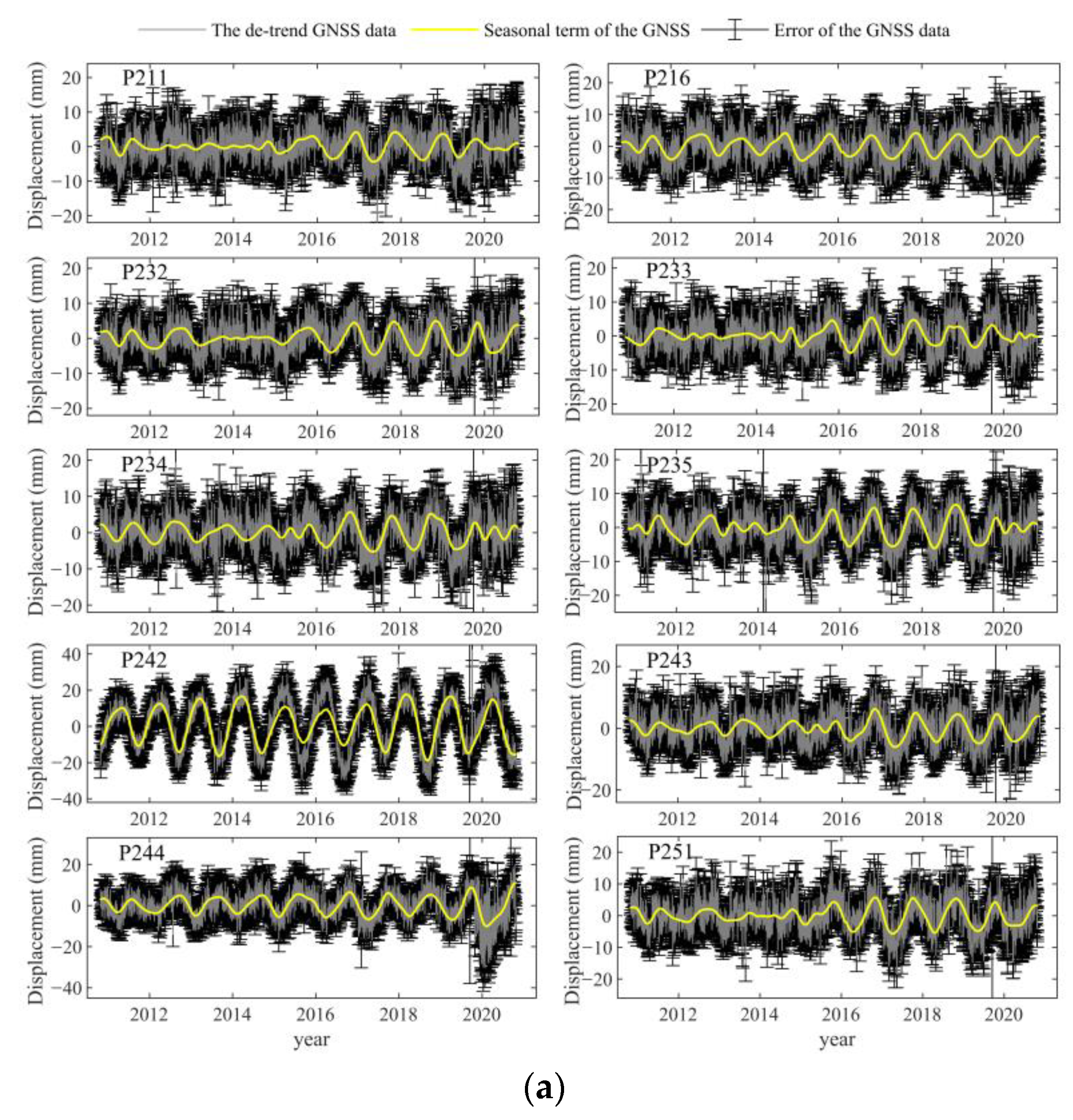
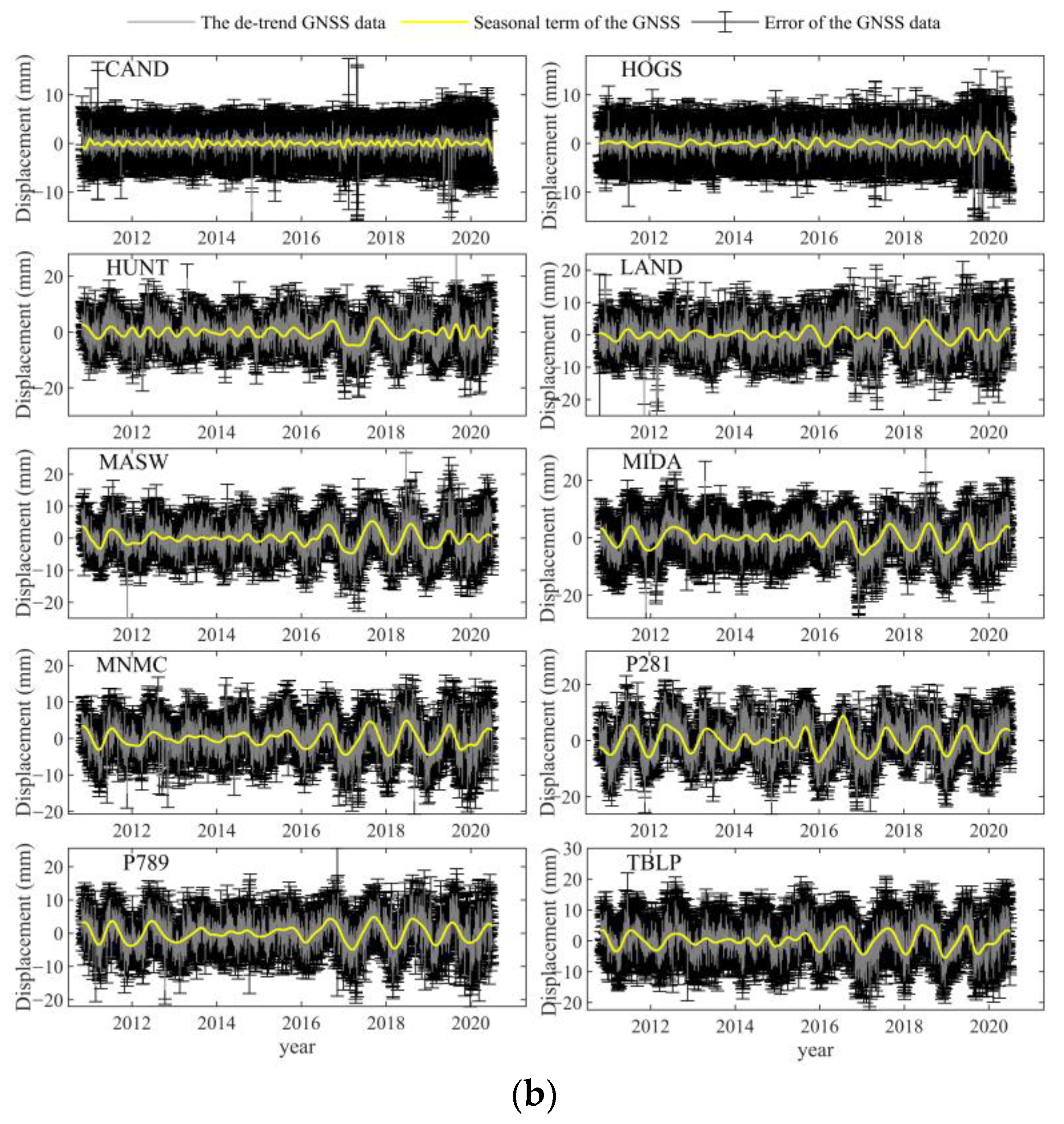
4.2. Feature Extraction of Seasonal and Trend Items
- (1)
- Comparison results between trend terms.
- (2)
- Comparison results between seasonal terms.
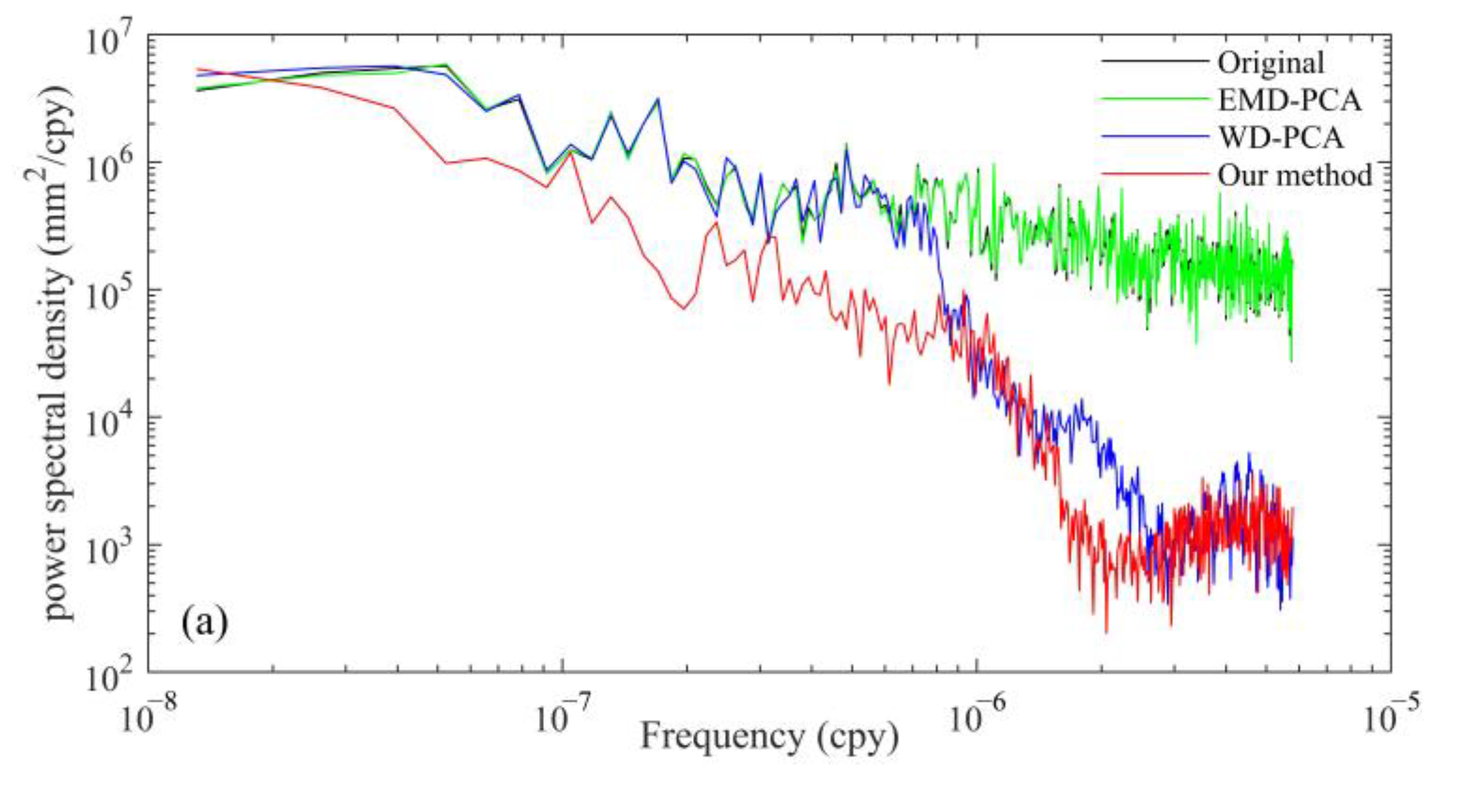
4.3. Noise Analysis
5. Conclusions
- (1)
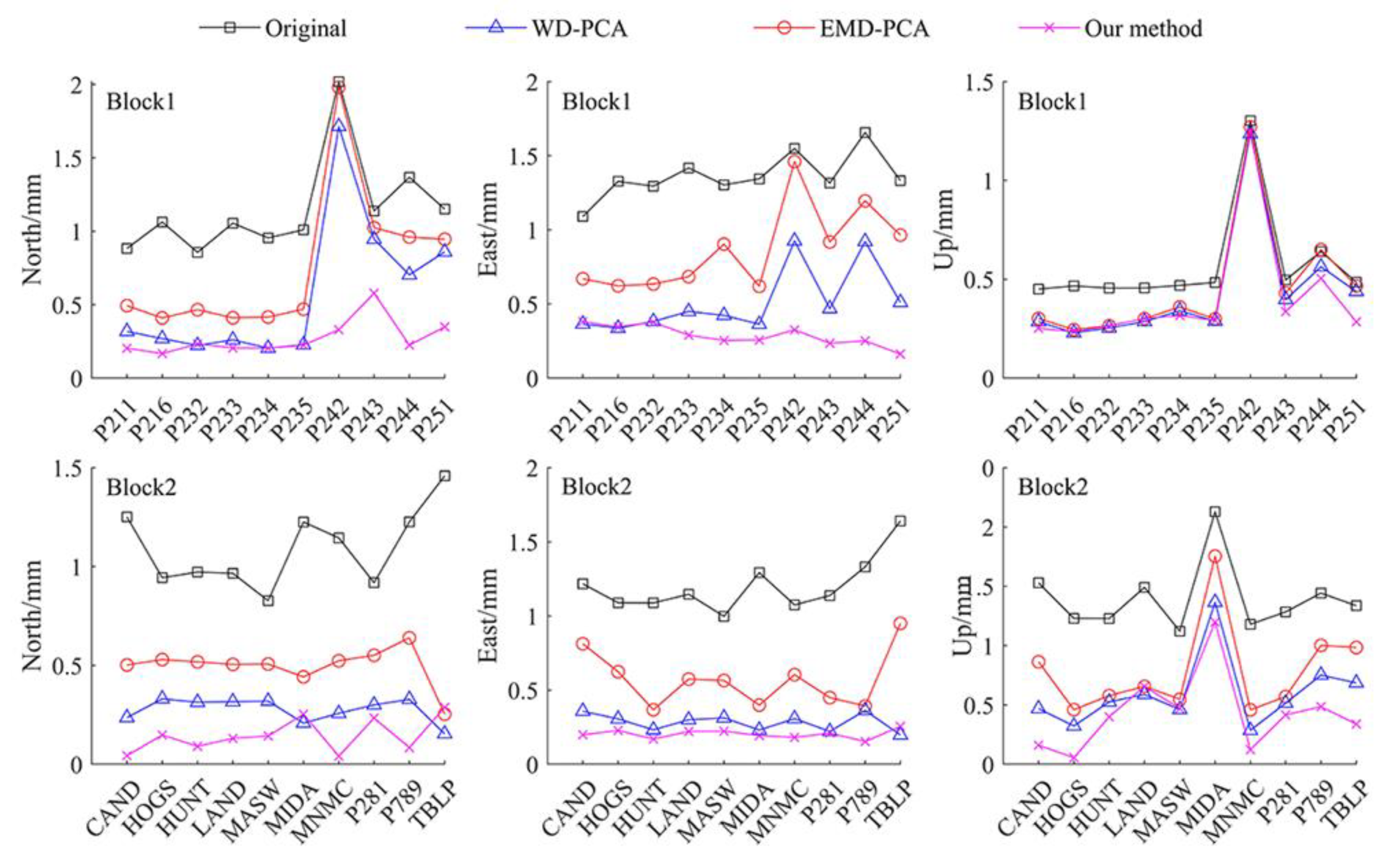
- Compared with other typically applied approaches, the newly proposed approaches were more accurate in denoising the GNSS daily time series. In the Block 1 region in the N, E and U directions, the mean STDs of the raw residual data, WD-PCA and EMD-PCA were (1.15, 1.36, 5.70) mm, (0.57, 0.51, 4.32) mm and (0.76, 0.87, 4.59) mm, respectively, whereas those of the proposed approach were 0.27, 0.29 and 4.03 mm, respectively. In Block 2 in the N, E and U directions, the mean STDs of the raw residual data, WD-PCA and EMD-PCA were (1.09, 1.20, 4.79) mm, (0.28, 0.28, 3.19) mm and (0.50, 0.57, 3.58) mm, respectively, whereas those of the proposed approach were 0.15, 0.20 and 2.86 mm, respectively. The performance of the proposed approach across the two regions was consistent, indicating that it can effectively decrease noise at low- and high-frequency in GNSS daily sequences. The proposed method is suitable for denoising nonlinear and nonstationary GNSS position sequences.
- (2)
- WD, EMD and CEEMD were used to extract the features from the GNSS daily data. The results of the trend-feature extraction showed that the accuracy of CEEMD was 99.99% for trend-term feature extraction in the denoised GNSS daily sequences, which was higher than the 99.96% and 97.60% accuracy levels exhibited by WD for EMD, respectively. Compared with WD and EMD, CEEMD was more reliable and stable in Blocks 1 and 2. The results of seasonal-feature extraction demonstrated that the average PCC extracted via CEEMD was 0.36, which was 63.6% and 27.3% higher than those of WD and EMD, respectively. These results showed that the seasonal terms obtained by CEEMD were consistent with the residual time series, and that CEEMD is more reliable than WD and EMD.
- (3)
- For the raw GNSS data for most cases in Blocks 1 and 2, the WN + FN + RW model was the optimal noise model. For WD-PCA and EMD-PCA for most cases in Blocks 1 and 2, the WN + GGM and WN + FN + RW models were the best noise models. For the proposed method, the WN + GGM model was the best noise model in Blocks 1 and 2. The second-best model was the GGM model in Block 1 and the GGM + WN model in Block 2. These results were obtained possibly because the components of the noise in the raw and denoised GNSS data were complex, and that applying only one model to all the GNSS positions in the selected GNSS region is unreasonable.
- (4)
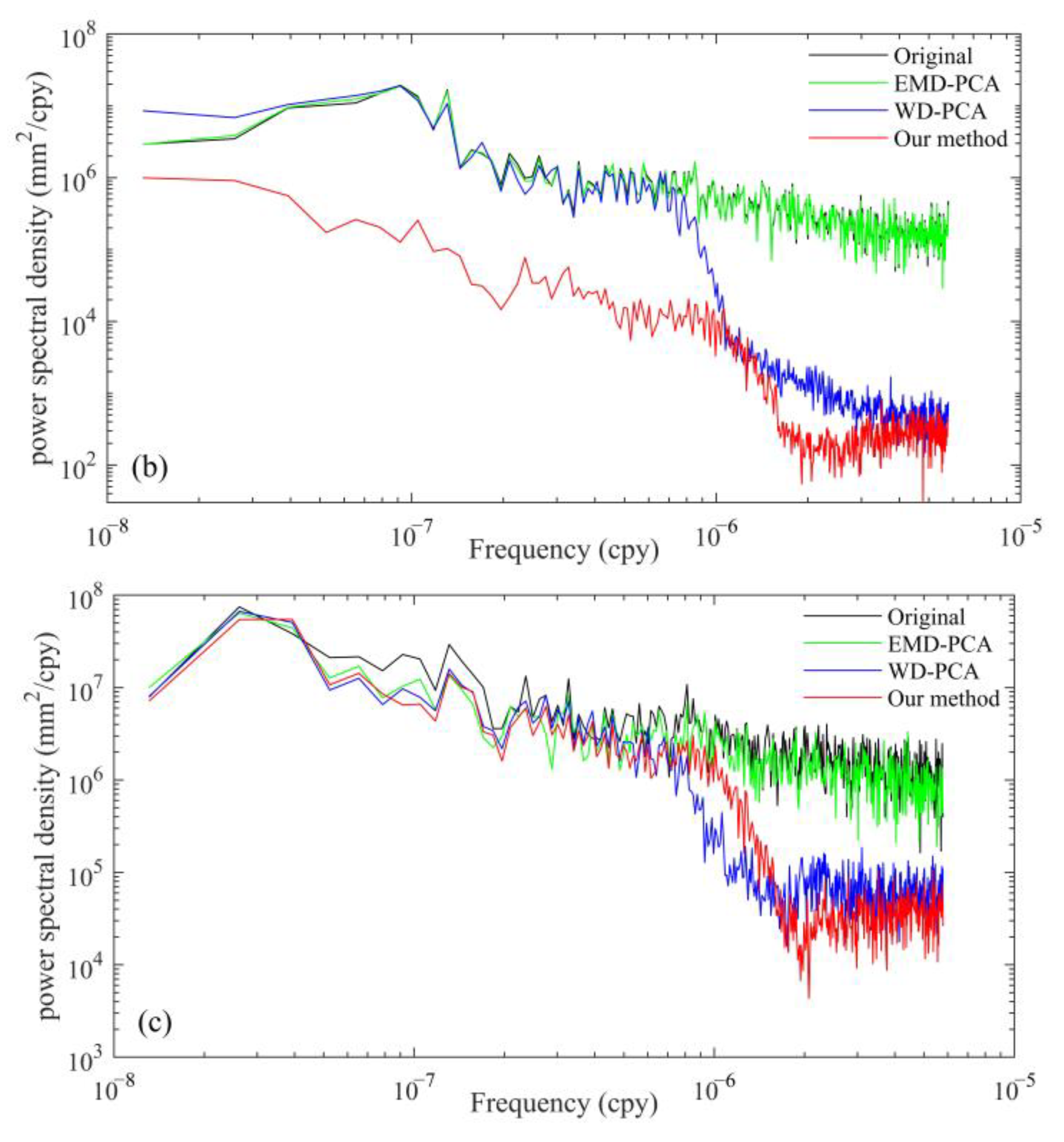
- Results of spectral analysis suggest that the proposed method is better than the other two methods for all three components. The proposed method is suitable for denoising nonlinear and nonstationary GNSS data. The advantage of the proposed method is that it fully exploits the merits of CEEMD and WD. CEEMD was first used to obtain various IMFs and then to obtain noise-dominant IMFs owing to its good adaptive processing ability. Finally, it fully considers the correlation between the different components of each station and the non-uniform behavior of the CME on a spatial scale.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. CEEMD Method
- (1)
- The locations of all the local minima and maxima in the signal S(t) are identified.
- (2)
- Interpolate a natural cubic spline through the local maxima (minima) to find the largest (smallest) envelope of S(t).
- (3)
- Calculate the mean values: a(t) = (max(t) + min(t))/2.
- (4)
- Remove details with: A(t) = S(t) − a(t).
- (5)
- Repeat steps (1) to (4) on d(t) until the stopping criterion is met; the resulting d(t) is referred to as an IMF, Ii(t).
- (6)
- Compute the residual with: R(t) = S(t) − Ii(t).
- (7)
- Iterate steps (1) to (6) until no more IMFs are available.
Appendix A.2. Correlation Coefficient between Each IMF and the Raw Signal
Appendix A.3. Definition of IC
Appendix B




References
- Parkinson, B.W.; Spilker, J.J. Progress in Astronautics and Aeronautics: Global Positioning System: Theory and Applications; AIAA: Reston, VA, USA, 1996; Volume 164. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Bock, Y.; Melgar, D. Physical applications of GPS geodesy: A review. Rep. Prog. Phys. 2016, 79, 106801. [Google Scholar] [CrossRef]
- Blewitt, G.; Lavallée, D. Effect of annual signals on geodetic velocity. J. Geophys. Res. Solid Earth 2002, 107, ETG 9-1–ETG 9-11. [Google Scholar] [CrossRef]
- Li, S.-Q.; Chen, Q.-F.; Zhao, L.; Zhu, L.-P.; Gao, J.-Z.; Li, M.-F.; Liu, G.-P.; Wang, B. Anomalous focal mechanism of the May 2011 Mw 5.7 deep earthquake in Northeastern China: Regional waveform inversion and possible mechanism. Chin. J. Geophys. 2013, 56, 2959–2970. [Google Scholar] [CrossRef]
- Xiang, Y.; Yue, J.; Tang, K.; Li, Z. A comprehensive study of the 2016 Mw 6.0 Italy earthquake based on high-rate (10 Hz) GPS data. Adv. Space Res. 2019, 63, 103–117. [Google Scholar] [CrossRef]
- Xu, C.; Gong, Z.; Niu, J. Recent developments in seismological geodesy. Geod. Geodyn. 2016, 7, 157–164. [Google Scholar] [CrossRef]
- Amiri-Simkooei, A. On the nature of GPS draconitic year periodic pattern in multivariate position time series. J. Geophys. Res. Solid Earth 2013, 118, 2500–2511. [Google Scholar] [CrossRef]
- Wdowinski, S.; Bock, Y.; Zhang, J.; Fang, P.; Genrich, J. Southern California permanent GPS geodetic array: Spatial filtering of daily positions for estimating coseismic and postseismic displacements induced by the 1992 Landers earthquake. J. Geophys. Res. Solid Earth 1997, 102, 18057–18070. [Google Scholar] [CrossRef]
- Nikolaidis, R. Observation of Geodetic and Seismic Deformation with the Global Positioning System; University of California: San Diego, CA, USA, 2002. [Google Scholar]
- Dong, D.; Fang, P.; Bock, Y.; Webb, F.; Prawirodirdjo, L.; Kedar, S.; Jamason, P. Spatiotemporal filtering using principal component analysis and Karhunen-Loeve expansion approaches for regional GPS network analysis. J. Geophys. Res. Solid Earth 2006, 111, B03405. [Google Scholar] [CrossRef]
- He, X.; Hua, X.; Yu, K.; Xuan, W.; Lu, T.; Zhang, W.; Chen, X. Accuracy enhancement of GPS time series using principal component analysis and block spatial filtering. Adv. Space Res. 2015, 55, 1316–1327. [Google Scholar] [CrossRef]
- Bos, M.; Fernandes, R.; Williams, S.; Bastos, L. Fast error analysis of continuous GNSS observations with missing data. J. Geod. 2013, 87, 351–360. [Google Scholar] [CrossRef]
- Bos, M.S.; Montillet, J.-P.; Williams, S.D.P.; Fernandes, R.M.S. Introduction to Geodetic Time Series Analysis. In Geodetic Time Series Analysis in Earth Sciences; Montillet, J.-P., Bos, M.S., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 29–52. [Google Scholar]
- Santamaría-Gómez, A.; Bouin, M.N.; Collilieux, X.; Wöppelmann, G. Correlated errors in GPS position time series: Implications for velocity estimates. J. Geophys. Res. Solid Earth 2011, 116, 384–398. [Google Scholar] [CrossRef]
- Van Dam, T.; Wahr, J.; Milly, P.; Shmakin, A.; Blewitt, G.; Lavallée, D.; Larson, K. Crustal displacements due to continental water loading. Geophys. Res. Lett. 2001, 28, 651–654. [Google Scholar] [CrossRef]
- Dong, D.; Fang, P.; Bock, Y.; Cheng, M.; Miyazaki, S.I. Anatomy of apparent seasonal variations from GPS-derived site position time series. J. Geophys. Res. Solid Earth 2002, 107, ETG 9-1–ETG 9-16. [Google Scholar] [CrossRef]
- Penna, N.; Stewart, M. Aliased tidal signatures in continuous GPS height time series. Geophys. Res. Lett. 2003, 30, 2184. [Google Scholar] [CrossRef]
- Ray, J.; Altamimi, Z.; Collilieux, X.; Van Dam, T. Anomalous harmonics in the spectra of GPS position estimates. GPS Solut. 2008, 12, 55–64. [Google Scholar] [CrossRef]
- Ming, F.; Yang, Y.; Zeng, A.; Jing, Y. Analysis of seasonal signals and long-term trends in the height time series of IGS sites in China. Sci. China Earth Sci. 2016, 59, 1283–1291. [Google Scholar] [CrossRef]
- Yuan, L.G.; Ding, X.L.; Chen, W.; Kwok, S.; Chan, S.B.; Hung, P.S.; Chau, K.T. Characteristics of daily position time series from the Hong Kong GPS fiducial network. Chin. J. Geophys. 2008, 51, 976–990. [Google Scholar] [CrossRef]
- Jackson, D.A.; Chen, Y. Robust principal component analysis and outlier detection with ecological data. Env. Off. J. Int. Env. Soc. 2004, 15, 129–139. [Google Scholar] [CrossRef]
- Lu, C.-W.; Xia, F. Microseismic noise reduction based on EWT and Meyer adaptive threshold. Prog. Geophys. 2020, 35, 1010–1016. [Google Scholar] [CrossRef]
- Zeng, J.-W.; Han, L.-G.; Xu, Z. Virtual source signals de-noising based on wavelet transform. Prog. Geophys. 2018, 33, 2507–2511. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Langston, C.A.; Horton, S.P. Automatic microseismic denoising and onset detection using the synchrosqueezed continuous wavelet transform. Geophysics 2016, 81, V341–V355. [Google Scholar] [CrossRef]
- Azarbad, M.R.; Mosavi, M. A new method to mitigate multipath error in single-frequency GPS receiver with wavelet transform. GPS Solut. 2014, 18, 189–198. [Google Scholar] [CrossRef]
- Bakshi, B.R. Multiscale PCA with application to multivariate statistical process monitoring. AIChE J. 1998, 44, 1596–1610. [Google Scholar] [CrossRef]
- Vautard, R.; Yiou, P.; Ghil, M. Singular-spectrum analysis: A toolkit for short, noisy chaotic signals. Phys. D Nonlinear Phenom. 1992, 58, 95–126. [Google Scholar] [CrossRef]
- Jia, R.-S.; Liang, Y.-Q.; Hua, Y.-C.; Sun, H.-M.; Xia, F.-F. Suppressing non-stationary random noise in microseismic data by using ensemble empirical mode decomposition and permutation entropy. J. Appl. Geophys. 2016, 133, 132–140. [Google Scholar] [CrossRef]
- Jin, T.; Xiao, M.; Jiang, W.; Shum, C.; Ding, H.; Kuo, C.Y.; Wan, J. An adaptive method for nonlinear sea level trend estimation by combining EMD and SSA. Earth Space Sci. 2021, 8, e2020EA001300. [Google Scholar] [CrossRef]
- Kong, Q.; Zhang, L.; Han, L.; Guo, J.; Zhang, D.; Fang, W. Analysis of 25 years of polar motion derived from the DORIS space geodetic technique using FFT and SSA methods. Sensors 2020, 20, 2823. [Google Scholar] [CrossRef]
- Shen, Y.; Zheng, W.; Yin, W.; Xu, A.; Zhu, H. Feature extraction algorithm using a correlation coefficient combined with the VMD and its application to the GPS and GRACE. IEEE Access 2021, 9, 17507–17519. [Google Scholar] [CrossRef]
- Xu, H.; Lu, T.; Montillet, J.-P.; He, X. An improved adaptive IVMD-WPT-Based noise reduction algorithm on GPS height time series. Sensors 2021, 21, 8295. [Google Scholar] [CrossRef]
- Montillet, J.-P.; Tregoning, P.; McClusky, S.; Yu, K. Extracting white noise statistics in GPS coordinate time series. IEEE Geosci. Remote Sens. Lett. 2012, 10, 563–567. [Google Scholar] [CrossRef]
- Lu, C.; Kuang, C.; Zhang, H.; Yi, Z. Multipath correction method by combining EMD and PCA. Geotech. Investig. Surv. 2014, 42, 58–62. [Google Scholar]
- He, X.; Yu, K.; Montillet, J.-P.; Xiong, C.; Lu, T.; Zhou, S.; Ma, X.; Cui, H.; Ming, F. GNSS-TS-NRS: An Open-source MATLAB-Based GNSS time series noise reduction software. Remote Sens. 2020, 12, 3532. [Google Scholar] [CrossRef]
- Lee, T.; Ouarda, T.B. An EMD and PCA hybrid approach for separating noise from signal, and signal in climate change detection. Int. J. Climatol. 2012, 32, 624–634. [Google Scholar] [CrossRef]
- Zhang, H.; Kuang, C.; Lu, C.; Zhou, Y. A multipath correction method based on wavelet filtering and PCA. J. Geod. and Geodynamics 2013, 33, 137–141. [Google Scholar] [CrossRef]
- Lu, J.; Chen, X.; Feng, S. A GPS Time Series Prediction Model Based on CEEMD. J. Adv. Comput. Netw 2016, 4, 70–74. [Google Scholar] [CrossRef]
- Zhao, L.; Gao, J.; Li, Z.; Wang, J. GPS Multipath Correction Algorithm Based on CEEMD-Wavelet-SavGol Model. Bull. Surv. Mapp. 2017, 11, 1. [Google Scholar] [CrossRef]
- Li, Y.; Han, L.; Yi, L.; Zhong, S.; Chen, C. Feature extraction and improved denoising method for nonlinear and nonstationary high-rate GNSS coseismic displacements applied to earthquake focal mechanism inversion of the El Mayor-Cucapah earthquake. Adv. Space Res. 2021, 68, 3971–3991. [Google Scholar] [CrossRef]
- Tregoning, P.; Watson, C. Atmospheric effects and spurious signals in GPS analyses. J. Geophys. Res. Solid Earth 2009, 114, 1–15. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E.; Long, S.R.; Peng, C.-K. On the trend, detrending, and variability of nonlinear and nonstationary time series. Proc. Natl. Acad. Sci. USA 2007, 104, 14889–14894. [Google Scholar] [CrossRef]
- Jiang, W.-P.; Li, Z.; Liu, H.-F.; Zhao, Q. Cause analysis of the non-linear variation of the IGS reference station coordinate time series inside China. Chin. J. Geophys. 2013, 56, 2228–2237. [Google Scholar] [CrossRef]
- Tian, Y.; Shen, Z. Progress on reduction of non-tectonic noise in GPS position time series. Acta Seismol. Sin. 2009, 31, 68–81. [Google Scholar]
- Goudarzi, M.A.; Cocard, M.; Santerre, R.; Woldai, T. GPS interactive time series analysis software. GPS Solut. 2013, 17, 595–603. [Google Scholar] [CrossRef]
- Bogusz, J.; Klos, A. On the significance of periodic signals in noise analysis of GPS station coordinates time series. GPS Solut. 2016, 20, 655–664. [Google Scholar] [CrossRef]
- Blewitt, G. Self-consistency in reference frames, geocenter definition, and surface loading of the solid Earth. J. Geophys. Res. Solid Earth 2003, 108. [Google Scholar] [CrossRef]
- Langbein, J. Improved efficiency of maximum likelihood analysis of time series with temporally correlated errors. J. Geod. 2017, 91, 985–994. [Google Scholar] [CrossRef]
- Olivares-Pulido, G.; Teferle, F.N.; Hunegnaw, A. Markov chain Monte Carlo and the application to geodetic time series analysis. In Geodetic Time Series Analysis in Earth Sciences; Montillet, J.-P., Bos, M.S., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 53–138. [Google Scholar]
- Kaczmarek, A.; Kontny, B. Identification of the noise model in the time series of GNSS stations coordinates using wavelet analysis. Remote Sens. 2018, 10, 1611. [Google Scholar] [CrossRef]
- He, X.; Bos, M.S.; Montillet, J.P.; Fernandes, R.M.S. Investigation of the noise properties at low frequencies in long GNSS time series. J. Geod. 2019, 93, 1271–1282. [Google Scholar] [CrossRef]
- He, X.; Montillet, J.-P.; Fernandes, R.; Melbourne, T.I.; Jiang, W.; Huang, Z. Sea Level Rise Estimation on the Pacific Coast from Southern California to Vancouver Island. Remote Sens. 2022, 14, 4339. [Google Scholar] [CrossRef]
- He, X.; Bos, M.S.; Montillet, J.-P.; Fernandes, R.; Melbourne, T.; Jiang, W.; Li, W. Spatial variations of stochastic noise properties in GPS time series. Remote Sens. 2021, 13, 4534. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Boudraa, A.; Cexus, J.; Saidi, Z. EMD-based signal noise reduction. Int. J. Signal Process. 2004, 1, 33–37. [Google Scholar] [CrossRef]
- Yang, G.; Liu, Y.; Wang, Y.; Zhu, Z. EMD interval thresholding denoising based on similarity measure to select relevant modes. Signal Process. 2015, 109, 95–109. [Google Scholar] [CrossRef]
- Yeh, J.-R.; Shieh, J.-S.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Kaslovsky, D.N.; Meyer, F.G. Noise corruption of empirical mode decomposition and its effect on instantaneous frequency. Adv. Adapt. Data Anal. 2010, 2, 373–396. [Google Scholar] [CrossRef]
- Li, Y.; Xu, C.; Yi, L.; Fang, R.J.J.o.G. A data-driven approach for denoising GNSS position time series. J. Geod. 2018, 92, 905–922. [Google Scholar] [CrossRef]
- Akaike, H. A new look at the statistical model identification. IEEE Trans. Autom. Control. 1974, 19, 716–723. [Google Scholar] [CrossRef]
- Schwarz, G. Estimating the dimension of a model. Ann. Stat. 1978, 6, 461–464. [Google Scholar] [CrossRef]
- Anderson, D.; Burnham, K. Model Selection and Multi-Model Inference; Springer: Berlin/Heidelberg, Germany, 2004; Volume 63, p. 10. [Google Scholar]
- Schwarz, G.J.T. Estimating the Dimension of a Model. 1978, pp. 461–464. Available online: https://www.jstor.org/stable/2958889 (accessed on 8 March 2023).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Block 1 | Data Loss Rate (%) | Block 2 | Data Loss Rate (%) |
|---|---|---|---|
| P211 | 1.23 | CAND | 3.49 |
| P216 | 1.78 | HOGS | 0.63 |
| P232 | 1.33 | HUNT | 1.31 |
| P233 | 1.25 | LAND | 1.23 |
| P234 | 0.46 | MASW | 0.5 |
| P235 | 0.85 | MIDA | 1.46 |
| P242 | 0.68 | MNMC | 2.73 |
| P243 | 0.59 | P281 | 1.82 |
| P244 | 0.77 | P789 | 1.01 |
| P251 | 0.83 | TBLP | 3.95 |
| IMF | c1 | c2 | c3 | c4 | c5 | c6 | c7 | c8 |
|---|---|---|---|---|---|---|---|---|
| N | 0.41 | 0.37 | 0.32 | 0.29 | 0.32 | 0.41 | 0.76 | 0.51 |
| Methods | Overall Denoising | Block 1 | Block 2 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| N | E | U | N | E | U | N | E | U | |
| Original | 1.12 | 1.28 | 5.25 | 1.15 | 1.36 | 5.7 | 1.09 | 1.2 | 4.79 |
| WD-PCA | 0.45 | 0.53 | 3.7 | 0.57 | 0.51 | 4.32 | 0.28 | 0.28 | 3.19 |
| EMD-PCA | 0.56 | 0.68 | 3.91 | 0.76 | 0.87 | 4.59 | 0.5 | 0.57 | 3.58 |
| Our method | 0.31 | 0.3 | 3.46 | 0.27 | 0.29 | 4.03 | 0.15 | 0.2 | 2.86 |
| Block 1 | Similar degree (%) | Block 2 | Similar Degree (%) | ||||
|---|---|---|---|---|---|---|---|
| WD | EMD | CEEMD | WD | EMD | CEEMD | ||
| P211 | 99.97 | 99.91 | 99.99 | CAND | 99.97 | 99.94 | 99.97 |
| P216 | 99.99 | 99.65 | 99.98 | HOGS | 99.95 | 99.99 | 99.99 |
| P232 | 99.99 | 99.89 | 99.99 | HUNT | 99.95 | 99.96 | 99.99 |
| P233 | 99.96 | 99.89 | 99.98 | LAND | 99.96 | 99.97 | 99.99 |
| P234 | 99.97 | 99.99 | 99.99 | MASW | 99.97 | 99.95 | 99.99 |
| P235 | 99.97 | 100 | 100 | MIDA | 99.98 | 100 | 99.99 |
| P242 | 99.89 | 99.99 | 99.98 | MNMC | 99.93 | 99.96 | 99.97 |
| P243 | 99.96 | 99.98 | 99.99 | P281 | 99.97 | 99.42 | 99.99 |
| P244 | 99.93 | 53.65 | 99.97 | P789 | 99.95 | 99.91 | 100 |
| P251 | 99.95 | 99.97 | 100 | TBLP | 99.95 | 99.8 | 99.96 |
| Block 1 | PCCs | Block 2 | PCCs | ||||
|---|---|---|---|---|---|---|---|
| WD | EMD | CEEMD | WD | EMD | CEEMD | ||
| P211 | 0.01 | 0.05 | 0.39 | CAND | 0.02 | 0.2 | 0.31 |
| P216 | 0.12 | 0.21 | 0.31 | HOGS | 0.01 | 0.35 | 0.4 |
| P232 | 0.01 | 0.03 | 0.37 | HUNT | 0.01 | 0.06 | 0.39 |
| P233 | 0.13 | 0.34 | 0.31 | LAND | 0.02 | 0.36 | 0.4 |
| P234 | 0.01 | 0.06 | 0.37 | MASW | 0.13 | 0.35 | 0.42 |
| P235 | 0.01 | 0.3 | 0.36 | MIDA | 0.12 | 0.23 | 0.35 |
| P242 | 0.13 | 0.38 | 0.36 | MNMC | 0.01 | 0.35 | 0.34 |
| P243 | 0.12 | 0.22 | 0.32 | P281 | 0.29 | 0.05 | 0.4 |
| P244 | 0.31 | 0.1 | 0.34 | P789 | 0.29 | 0.23 | 0.32 |
| P251 | 0.13 | 0.15 | 0.32 | TBLP | 0.28 | 0.37 | 0.38 |
| Block | Noise Model | Raw | WD-PCA | EMD-PCA | Our Method | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AIC | BIC | BIC_tp | AIC | BIC | BIC_tp | AIC | BIC | BIC_tp | AIC | BIC | BIC_tp | ||
| 1 | WN | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| WN + PL | 0 | 0 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| WN + FN | 23.3 | 30 | 26.7 | 0 | 0 | 0 | 23.3 | 36.7 | 3.3 | 0 | 0 | 0 | |
| WN + FN + RW | 43.3 | 36.7 | 46.7 | 0 | 0 | 0 | 46.7 | 33.3 | 53.3 | 0 | 0 | 0 | |
| WN + RW | 0 | 6.7 | 6.7 | 0 | 3.3 | 3.3 | 3.3 | 13.3 | 20 | 13.3 | 30 | 13.3 | |
| GGM | 23.3 | 26.7 | 10 | 36.7 | 40 | 20 | 10 | 10 | 0 | 3.3 | 30 | 46.7 | |
| WN + GGM | 10 | 0 | 0 | 63.3 | 56.7 | 76.7 | 16.7 | 6.7 | 23.3 | 83.3 | 40 | 40 | |
| 2 | WN | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| WN + PL | 23.3 | 10 | 23.3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| WN + FN | 10 | 26.7 | 20 | 0 | 0 | 0 | 0 | 6.7 | 6.7 | 0 | 0 | 0 | |
| WN + FN + RW | 60 | 46.7 | 46.7 | 0 | 0 | 0 | 70 | 46.7 | 3.3 | 0 | 0 | 0 | |
| WN + RW | 0 | 6.7 | 0 | 0 | 3.3 | 3.3 | 6.7 | 23.3 | 0 | 10 | 16.7 | 13.3 | |
| GGM | 3.3 | 10 | 6.7 | 20 | 26.7 | 33.3 | 0 | 0 | 53.3 | 46.7 | 46.7 | 23.3 | |
| WN + GGM | 3.3 | 0 | 3.3 | 80 | 70 | 63.3 | 23.3 | 23.3 | 36.7 | 43.3 | 36.7 | 63.3 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Han, L.; Liu, X. Accuracy Enhancement and Feature Extraction for GNSS Daily Time Series Using Adaptive CEEMD-Multi-PCA-Based Filter. Remote Sens. 2023, 15, 1902. https://doi.org/10.3390/rs15071902
Li Y, Han L, Liu X. Accuracy Enhancement and Feature Extraction for GNSS Daily Time Series Using Adaptive CEEMD-Multi-PCA-Based Filter. Remote Sensing. 2023; 15(7):1902. https://doi.org/10.3390/rs15071902
Chicago/Turabian StyleLi, Yanyan, Linqiao Han, and Xiaolei Liu. 2023. "Accuracy Enhancement and Feature Extraction for GNSS Daily Time Series Using Adaptive CEEMD-Multi-PCA-Based Filter" Remote Sensing 15, no. 7: 1902. https://doi.org/10.3390/rs15071902
APA StyleLi, Y., Han, L., & Liu, X. (2023). Accuracy Enhancement and Feature Extraction for GNSS Daily Time Series Using Adaptive CEEMD-Multi-PCA-Based Filter. Remote Sensing, 15(7), 1902. https://doi.org/10.3390/rs15071902