

GloWS-Net: A Deep Learning Framework for Retrieving Global Sea Surface Wind Speed Using Spaceborne GNSS-R Data





Abstract
1. Introduction
- (1)
- GloWS-Net includes a convolution layer for extracting effective features from the combination of BRCS DDM and corresponding effective scattering area, and a full connection layer for processing auxiliary parameters and higher-level input parameters. The best architecture is obtained based on the validation set and evaluated on the testing set to verify the generality of the model.
- (2)
- When training GloWS-Net, some traditional machine learning strategies are used to prevent overfitting, including batch normalization and early stop.
- (3)
- Contribution from different inputs is exploited by the GloWS-Net deep learning model. Meanwhile, the influence of swell and rainfall on wind speed retrieval performance is considered and corrected.
- (4)
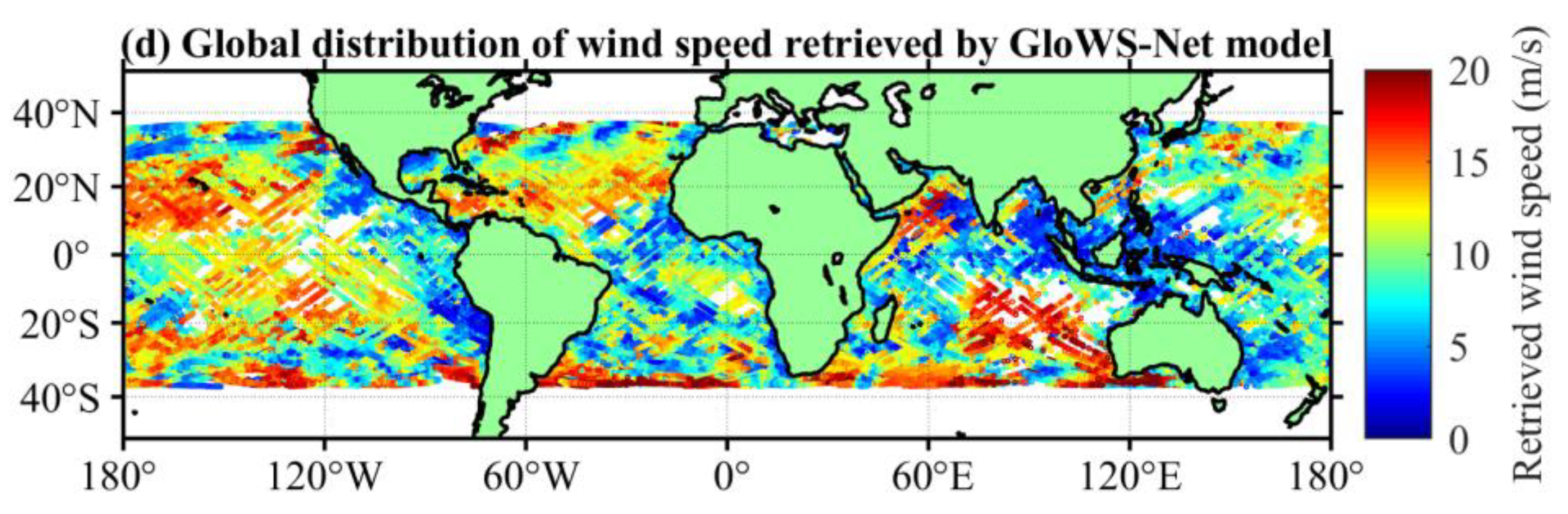
- The GloWS-Net model architecture has significantly reduced the underestimation phenomenon for high wind speeds. It outperforms the CyGNSSnet and MCNN architectures.
2. Data Set and Method Description
2.1. Data Set
- (1)
- CYGNSS GNSS-R L1 level data
- (2)
- ERA5 reanalysis data sets
- (3)
- Integrated Multi-satellite Retrievals for Global Precipitation Measurement (GPM IMERG) precipitation data sets
- (4)
- RSS CCMP wind analysis product
2.2. Method Description
3. Development of the GloWS-Net Deep Learning Model
3.1. CYGNSS Observations and Other Auxiliary Observations
3.2. GloWS-Net Model Design
3.3. GloWS-Net Model Training and Verification
4. Performance Analysis and Discussion of Wind Speed Retrieval
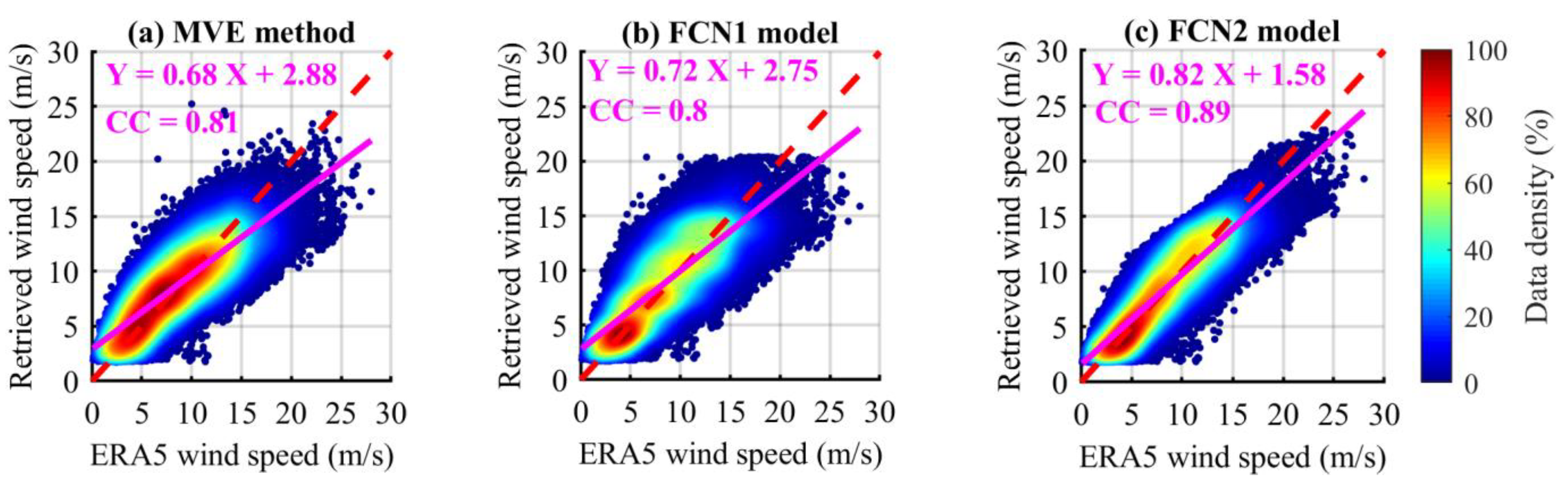
4.1. Comparison with ERA5 Data
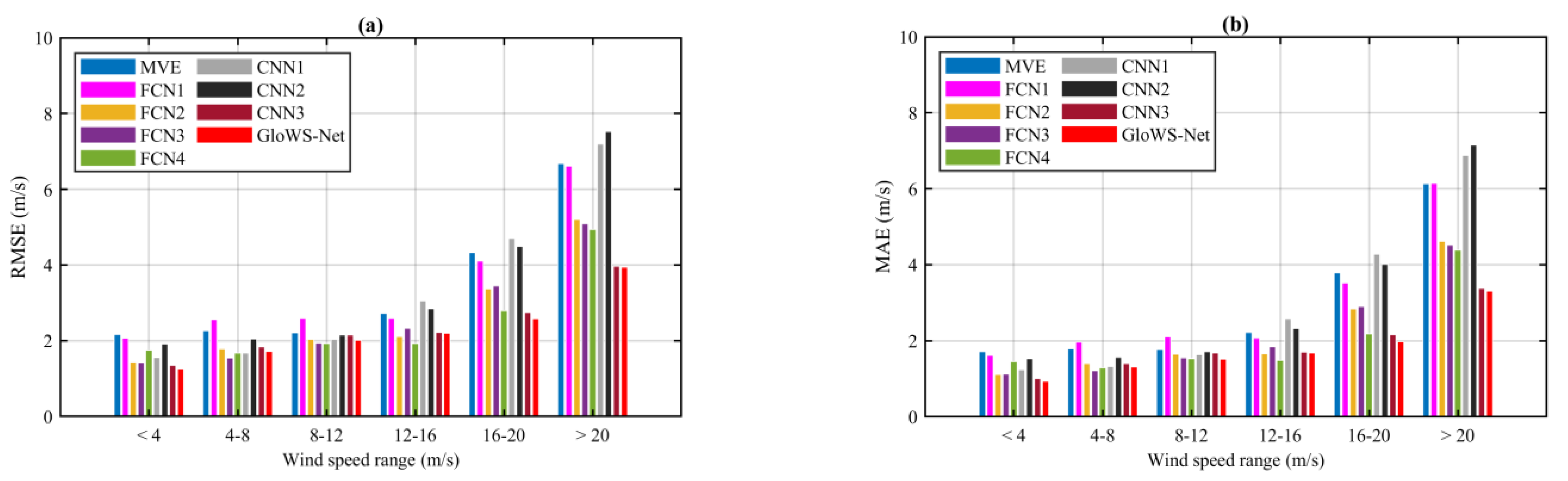
4.2. Comparison with CCMP Data
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, C.; Huang, W.; Gleason, S. Dual Antenna Space-Based GNSS-R Ocean Surface Mapping: Oil Slick and Tropical Cyclone Sensing. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 425–435. [Google Scholar] [CrossRef]
- Mayers, D.; Ruf, C. Tropical cyclone center fix using CYGNSS winds. J. Appl. Meteorol. Climatol. 2019, 58, 1993–2003. [Google Scholar] [CrossRef]
- Wang, S.; Shi, S.; Ni, B. Joint Use of Spaceborne Microwave Sensor Data and CYGNSS Data to Observe Tropical Cyclones. Remote Sens. 2020, 12, 3124. [Google Scholar] [CrossRef]
- Foti, G.; Gommenginger, C.; Srokosz, M. First Spaceborne GNSS-Reflectometry Observations of Hurricanes from the UK TechDemoSat-1 Mission. Geophys. Res. Lett. 2017, 44, 12358–12366. [Google Scholar] [CrossRef]
- Ruf, C.; Atlas, R.; Chang, P.; Clarizia, M.P.; Garrison, J.; Gleason, S.; Katzberg, S.; Jelenak, Z.; Johnson, J.; Majumdar, S.; et al. New Ocean Winds Satellite Mission to Probe Hurricanes and Tropical Convection. Bull. Am. Meteorol. Soc. 2016, 97, 385–395. [Google Scholar] [CrossRef]
- Jing, C.; Niu, X.; Duan, C.; Lu, F.; Di, G.; Yang, X. Sea Surface Wind Speed Retrieval from the First Chinese GNSS-R Mission: Technique and Preliminary Results. Remote Sens. 2019, 11, 3013. [Google Scholar] [CrossRef]
- Yang, G.; Bai, W.; Wang, J.; Hu, X.; Zhang, P.; Sun, Y.; Xu, N.; Zhai, X.; Xiao, X.; Xia, J.; et al. FY3E GNOS II GNSS Reflectometry: Mission Review and First Results. Remote Sens. 2022, 14, 988. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.; Cipollini, P.; Zuffada, C. First spaceborne observation of sea surface height using GPS-Reflectometry. Geophys. Res. Lett. 2016, 43, 767–774. [Google Scholar] [CrossRef]
- Li, W.; Rius, A.; Fabra, F.; Cardellach, E.; Ribo, S.; Martin-Neira, M. Revisiting the GNSS-R Waveform Statistics and Its Impact on Altimetric Retrievals. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2854–2871. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Zavorotny, V.U.; Camps, A. Sea Ice Detection Using U.K. TDS-1 GNSS-R Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4989–5001. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Spaceborne GNSS-R Sea Ice Detection Using Delay-Doppler Maps: First Results from the U.K. TechDemoSat-1 Mission. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 4795–4801. [Google Scholar] [CrossRef]
- Zhu, Y.; Tao, T.; Zou, J.; Yu, K.; Wickert, J.; Semmling, M. Spaceborne GNSS Reflectometry for Retrieving Sea Ice Concentration Using TDS-1 Data. IEEE Geosci. Remote Sens. Lett. 2020, 18, 612–616. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea Ice Sensing From GNSS-R Data Using Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1510–1514. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea Ice Thickness Measurement Using Spaceborne GNSS-R: First Results with TechDemoSat-1 Data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 577–587. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Tsunami Detection and Parameter Estimation From GNSS-R Delay-Doppler Map. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 4650–4659. [Google Scholar] [CrossRef]
- Warnock, A.M.; Ruf, C.S.; Morris, M. Storm surge prediction with cygnss winds. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 2975–2978. [Google Scholar]
- Li, X.; Yang, D.; Han, G.; Yang, L.; Wang, J.; Yang, J.; Chen, D.; Zheng, G. Exploiting the Potential of Coastal GNSS-R for Improving Storm Surge Modeling. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1134–1138. [Google Scholar] [CrossRef]
- Peng, Q.; Jin, S. Significant Wave Height Estimation from Space-Borne Cyclone-GNSS Reflectometry. Remote Sens. 2019, 11, 584. [Google Scholar] [CrossRef]
- Yang, S.; Jin, S.; Jia, Y.; Ye, M. Significant Wave Height Estimation from Joint CYGNSS DDMA and LES Observations. Sensors 2021, 21, 6123. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K. Significant Wave Height Retrieval Method Based on Spaceborne GNSS Reflectometry. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1503705. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K. A New Integrated Method of CYGNSS DDMA and LES Measurements for Significant Wave Height Estimation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1505605. [Google Scholar] [CrossRef]
- Wang, F.; Yang, D.; Yang, L. Retrieval and Assessment of Significant Wave Height from CYGNSS Mission Using Neural Network. Remote Sens. 2022, 14, 3666. [Google Scholar] [CrossRef]
- Yu, K.; Han, S.; Bu, J.; An, Y.; Zhou, Z.; Wang, C.; Tabibi, S.; Cheong, J.W. Spaceborne GNSS Reflectometry. Remote Sens. 2022, 14, 1605. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K.; Park, H.; Huang, W.; Han, S.; Yan, Q.; Qian, N.; Lin, Y. Estimation of Swell Height Using Spaceborne GNSS-R Data from Eight CYGNSS Satellites. Remote Sens. 2022, 14, 4634. [Google Scholar] [CrossRef]
- Asgarimehr, M.; Zavorotny, V.; Wickert, J.; Reich, S. Can GNSS Reflectometry Detect Precipitation Over Oceans? Geophys. Res. Lett. 2018, 45, 12585–12592. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K.; Ni, J.; Yan, Q.; Han, S.; Wang, J.; Wang, C. Machine learning-based methods for sea surface rainfall detection from CYGNSS delay-doppler maps. GPS Solut. 2022, 26, 132. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K. Sea Surface Rainfall Detection and Intensity Retrieval Based on GNSS-Reflectometry Data from the CYGNSS Mission. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5802015. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K.; Han, S.; Qian, N.; Lin, Y.; Wang, J. Retrieval of Sea Surface Rainfall Intensity Using Spaceborne GNSS-R Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5803116. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W.; Jin, S.; Jia, Y. Pan-tropical soil moisture mapping based on a three-layer model from CYGNSS GNSS-R data. Remote Sens. Environ. 2020, 247, 111944. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Luzi, G.; Crosetto, M. Above-Ground Biomass Retrieval over Tropical Forests: A Novel GNSS-R Approach with CyGNSS. Remote Sens. 2020, 12, 29. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.S.; Jales, P.; Gommenginger, C. Spaceborne GNSS-R Minimum Variance Wind Speed Estimator. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6829–6843. [Google Scholar] [CrossRef]
- Ruf, C.S.; Gleason, S.; McKague, D.S. Assessment of CYGNSS Wind Speed Retrieval Uncertainty. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 87–97. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.S. Wind Speed Retrieval Algorithm for the Cyclone Global Navigation Satellite System (CYGNSS) Mission. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4419–4432. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Garrison, J.L. Generalized Linear Observables for Ocean Wind Retrieval from Calibrated GNSS-R Delay–Doppler Maps. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1142–1155. [Google Scholar] [CrossRef]
- Hammond, M.L.; Foti, G.; Rawlinson, J.; Gommenginger, C.; Srokosz, M.; King, L.; Unwin, M.; Roselló, J. First Assessment of Geophysical Sensitivities from Spaceborne Galileo and BeiDou GNSS-Reflectometry Data Collected by the UK TechDemoSat-1 Mission. Remote Sens. 2020, 12, 2927. [Google Scholar] [CrossRef]
- Liu, Y.; Collett, I.; Morton, Y.J. Application of Neural Network to GNSS-R Wind Speed Retrieval. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9756–9766. [Google Scholar] [CrossRef]
- Asgarimehr, M.; Zhelavskaya, I.; Foti, G.; Reich, S.; Wickert, J. A GNSS-R Geophysical Model Function: Machine Learning for Wind Speed Retrievals. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1333–1337. [Google Scholar] [CrossRef]
- Reynolds, J.; Clarizia, M.P.; Santi, E. Wind Speed Estimation from CYGNSS Using Artificial Neural Networks. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 708–716. [Google Scholar] [CrossRef]
- Chu, X.; He, J.; Song, H.; Qi, Y.; Sun, Y.; Bai, W.; Li, W.; Wu, Q. Multimodal Deep Learning for Heterogeneous GNSS-R Data Fusion and Ocean Wind Speed Retrieval. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 5971–5981. [Google Scholar] [CrossRef]
- Asgarimehr, M.; Arnold, C.; Weigel, T.; Ruf, C.; Wickert, J. GNSS reflectometry global ocean wind speed using deep learning: Development and assessment of CyGNSSnet. Remote Sens. Environ. 2022, 269, 112801. [Google Scholar] [CrossRef]
- Guo, W.; Du, H.; Guo, C.; Southwell, B.J.; Cheong, J.W.; Dempster, A.G. Information fusion for GNSS-R wind speed retrieval using statistically modified convolutional neural network. Remote Sens. Environ. 2022, 272, 112934. [Google Scholar] [CrossRef]
- Li, X.; Yang, D.; Yang, J.; Zheng, G.; Han, G.; Nan, Y.; Li, W. Analysis of coastal wind speed retrieval from CYGNSS mission using artificial neural network. Remote Sens. Environ. 2021, 260, 112454. [Google Scholar] [CrossRef]
- Liu, X.; Bai, W.; Xia, J.; Huang, F.; Yin, C.; Sun, Y.; Du, Q.; Meng, X.; Liu, C.; Hu, P.; et al. FA-RDN: A Hybrid Neural Network on GNSS-R Sea Surface Wind Speed Retrieval. Remote Sens. 2021, 13, 4820. [Google Scholar] [CrossRef]
- Gleason, S. Space-Based GNSS Scatterometry: Ocean Wind Sensing Using an Empirically Calibrated Model. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4853–4863. [Google Scholar] [CrossRef]
- Gleason, S.; Ruf, C.S.; Clarizia, M.P.; Brien, A.J.O. Calibration and Unwrapping of the Normalized Scattering Cross Section for the Cyclone Global Navigation Satellite System. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2495–2509. [Google Scholar] [CrossRef]
- Jing, C.; Yang, X.; Ma, W.; Yu, Y.; Dong, D.; Li, Z.; Xu, C. Retrieval of sea surface winds under hurricane conditions from GNSS-R observations. Acta Oceanol. Sin. 2016, 35, 91–97. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K.; Zhu, Y.; Qian, N.; Chang, J. Developing and Testing Models for Sea Surface Wind Speed Estimation with GNSS-R Delay Doppler Maps and Delay Waveforms. Remote Sens. 2020, 12, 3760. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.S. Statistical Derivation of Wind Speeds from CYGNSS Data. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3955–3964. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.S. Bayesian Wind Speed Estimation Conditioned on Significant Wave Height for GNSS-R Ocean Observations. J. Atmos. Ocean. Technol. 2017, 34, 1193–1202. [Google Scholar] [CrossRef]
- Wang, C.; Yu, K.; Qu, F.; Bu, J.; Han, S.; Zhang, K. Spaceborne GNSS-R Wind Speed Retrieval Using Machine Learning Methods. Remote Sens. 2022, 14, 3507. [Google Scholar] [CrossRef]
- Li, C.; Huang, W. An Algorithm for Sea-Surface Wind Field Retrieval From GNSS-R Delay-Doppler Map. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2110–2114. [Google Scholar] [CrossRef]
- Foti, G.; Gommenginger, C.; Jales, P.; Unwin, M.; Shaw, A.; Robertson, C.; Rosello, J. Spaceborne GNSS reflectometry for ocean winds: First results from the UK TechDemoSat-1 mission. Geophys. Res. Lett. 2015, 42, 5435–5441. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K.; Han, S.; Wang, C. Multi-Observable Wind Speed Retrieval Based on Spaceborne GNSS-R Delay Doppler Maps. In Proceedings of the IGARSS 2021-2021 IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 11–16 July 2021; pp. 7580–7583. [Google Scholar]
- Ruf, C.S.; Balasubramaniam, R. Development of the CYGNSS Geophysical Model Function for Wind Speed. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 66–77. [Google Scholar] [CrossRef]
- Guo, W.; Du, H.; Cheong, J.W.; Southwell, B.J.; Dempster, A.G. GNSS-R Wind Speed Retrieval of Sea Surface Based on Particle Swarm Optimization Algorithm. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4202414. [Google Scholar] [CrossRef]
- Atlas, R.; Hoffman, R.N.; Ardizzone, J.; Leidner, S.M.; Jusem, J.C.; Smith, D.K.; Gombos, D. A cross-calibrated, multiplatform ocean surface wind velocity product for meteorological and oceanographic applications. Bull. Am. Meteorol. Soc. 2011, 92, 157–174. [Google Scholar] [CrossRef]
- Mears, C.A.; Scott, J.; Wentz, F.J.; Ricciardulli, L.; Leidner, S.M.; Hoffman, R.; Atlas, R. A near-real-time version of the cross-calibrated multiplatform (CCMP) ocean surface wind velocity data set. J. Geophys. Res. Ocean. 2019, 124, 6997–7010. [Google Scholar] [CrossRef]
- Marchan-Hernandez, J.F.; Valencia, E.; Rodriguez-Alvarez, N.; Ramos-Perez, I.; Bosch-Lluis, X.; Camps, A.; Eugenio, F.; Marcello, J. Sea-State Determination Using GNSS-R Data. IEEE Geosci. Remote Sens. Lett. 2010, 7, 621–625. [Google Scholar] [CrossRef]
- Zhu, Y.; Yu, K.; Zou, J.; Wickert, J. Sea Ice Detection Based on Differential Delay-Doppler Maps from UK TechDemoSat-1. Sensors 2017, 17, 1614. [Google Scholar] [CrossRef]
- Said, F.; Jelenak, Z.; Park, J.; Soisuvarn, S.; Chang, P.S. A ′track-wise′ wind retrieval algorithm for the CYGNSS mission. In Proceedings of the IGARSS 2019-2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 8711–8714. [Google Scholar]
- Said, F.; Jelenak, Z.; Park, J.; Chang, P.S. The NOAA Track-Wise Wind Retrieval Algorithm and Product Assessment for CyGNSS. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4202524. [Google Scholar] [CrossRef]
- Balasubramaniam, R.; Ruf, C. Characterization of rain impact on L-Band GNSS-R ocean surface measurements. Remote Sens. Environ. 2020, 239, 111607. [Google Scholar] [CrossRef]
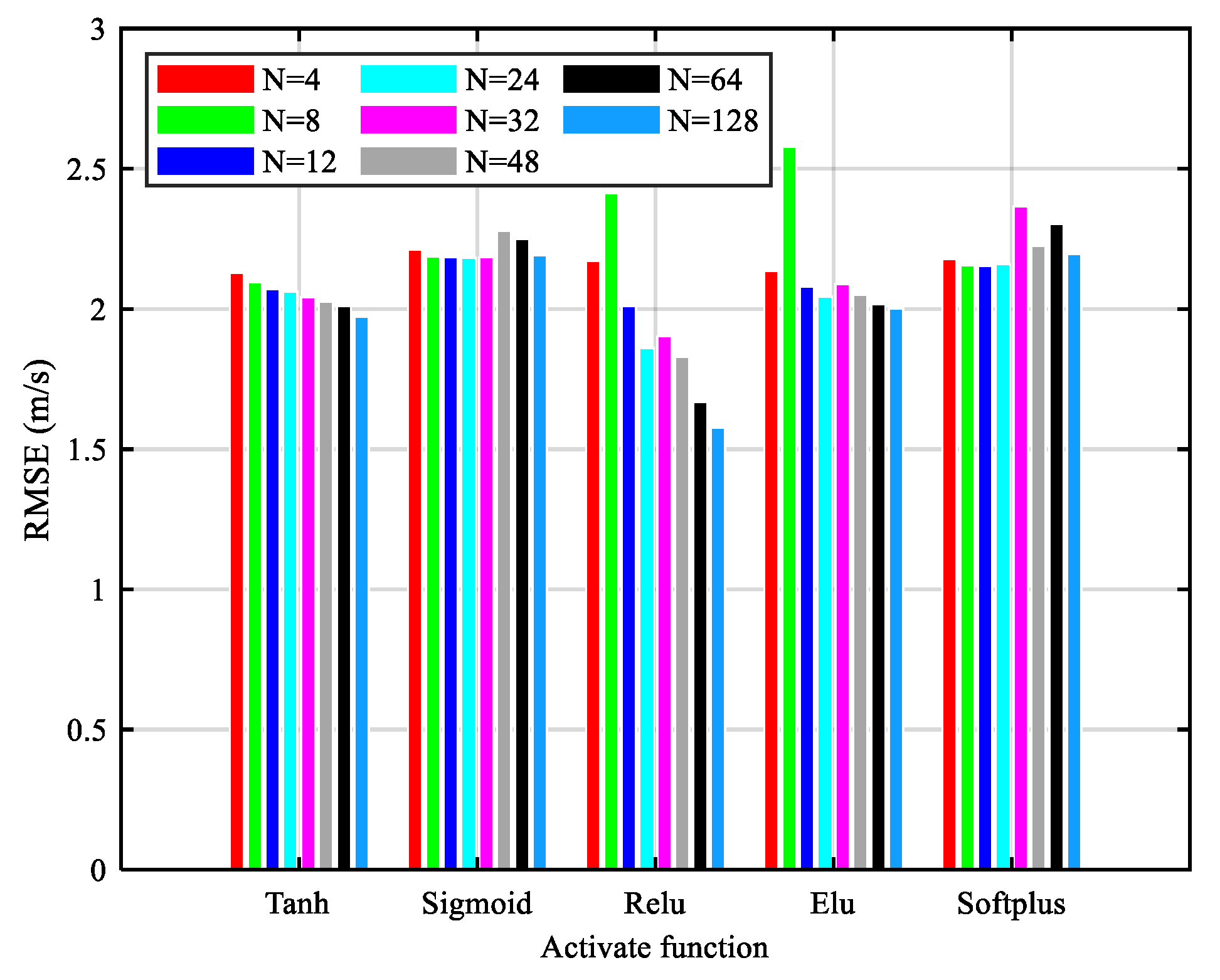
- Ertuğrul, Ö.F. A novel type of activation function in artificial neural networks: Trained activation function. Neural Netw. 2018, 99, 148–157. [Google Scholar] [CrossRef]
- Saïd, F.; Katzberg, S.J.; Soisuvarn, S. Retrieving hurricane maximum winds using simulated CYGNSS power-versus-delay waveforms. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2017, 10, 3799–3809. [Google Scholar] [CrossRef]
- Ruf, C.; Unwin, M.; Dickinson, J.; Rose, R.; Rose, D.; Vincent, M.; Lyons, A. CYGNSS: Enabling the Future of Hurricane Prediction [Remote Sensing Satellites]. IEEE Geosci. Remote Sens. Mag. 2013, 1, 52–67. [Google Scholar] [CrossRef]
- Wang, X.; Shum, C.; Johnson, J. Analysis of Surface Wind Diurnal Cycles in Tropical Regions using Mooring Observations and the CCMP Product. In Proceedings of the Conference on Hurricanes and Tropical Meteorology American Meteorological Society, Washington, DC, USA, 1–4 April 2014; p. 7A.7. [Google Scholar]
- Li, X.; Yang, D.; Yang, J.; Han, G.; Zheng, G.; Li, W. Validation of NOAA CyGNSS Wind Speed Product with the CCMP Data. Remote Sens. 2021, 13, 1832. [Google Scholar] [CrossRef]
- Dong, Z.; Jin, S. Evaluation of Spaceborne GNSS-R Retrieved Ocean Surface Wind Speed with Multiple Datasets. Remote Sens. 2019, 11, 2747. [Google Scholar] [CrossRef]
- Tianyu, Z.; Zhenjiang, M.; Jianhu, Z. Combining cnn with hand-crafted features for image classification. In Proceedings of the 2018 14th IEEE International Conference on Signal Processing (ICSP), Beijing, China, 12–16 August 2018; pp. 554–557. [Google Scholar]
- Zhang, S.; Li, C.; Qiu, S.; Gao, C.; Zhang, F.; Du, Z.; Liu, R. EMMCNN: An ETPS-Based Multi-Scale and Multi-Feature Method Using CNN for High Spatial Resolution Image Land-Cover Classification. Remote Sens. 2020, 12, 66. [Google Scholar] [CrossRef]
- Nabi, M.; Senyurek, V.; Gurbuz, A.C.; Kurum, M. Deep Learning-Based Soil Moisture Retrieval in CONUS Using CYGNSS Delay–Doppler Maps. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2022, 15, 6867–6881. [Google Scholar] [CrossRef]
- Zeng, L.; Brown, R.A. Scatterometer observations at high wind speeds. J. Appl. Meteorol. 1998, 37, 1412–1420. [Google Scholar] [CrossRef]
- Querol, J.; Alonso-Arroyo, A.; Onrubia, R.; Pascual, D.; Park, H.; Camps, A. SNR degradation in GNSS-R measurements under the effects of radio-frequency interference. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 4865–4878. [Google Scholar] [CrossRef]
- Asgarimehr, M.; Wickert, J.; Reich, S. TDS-1 GNSS reflectometry: Development and validation of forward scattering winds. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 4534–4541. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Literature | GNSS-R Observables | Retrieval Models | Retrieval Accuracy |
|---|---|---|---|---|
| Waveform matching method | [51] | Normalized power value of DDM | - | 1–2 m/s for WS < 20 m/s |
| Empirical model method | [31,33,34,47,52,53,54] | DDMA, DDMAV, ADDMV, LES, TES, NBRCS, Generalized Linear Observables | Polynomial fitting, exponential function, power function, combination of multiple observables. | ~2 m/s for WS < 20 m/s |
| Intelligent optimization algorithm | [31,55] | NBRCS、 LES | Combination model based on MVE and PSO. | PSO method is better than MVE method. The RMSE is better than 1.95 m/s for WS < 20 m/s. |
| Machine/Deep learning method | [36,38,39,40,41,42,43] | DDM, DDMA, LES, incidence angle, NBRCS, GPS satellite number, RCG, longitude and latitude of specular point, etc. | MHL-NN, ANN, HMDL, CNN, MCNN, FA-RDN | The retrieval accuracy of CNN, MCNN and FA-RDN models is the best. When the WS is less than 20-30 m/s, they are better than 1.36 m/s, 1.53 m/s and 1.45 m/s, respectively. |
| Input Variables | Description | |
|---|---|---|
| Related to DDM | NBRCS | Normalized bistatic radar cross section |
| LES | Leading edge slope | |
| TES | Trailing edge slope | |
| SNR | DDM signal to noise ratio | |
| Related to receiver | sp_rx_gain | Range corrected gain |
| Related to satellite geometry | sp_lon | Specular point longitude |
| sp_lat | Specular point latitude | |
| sp_inc_angle | Specular point incidence angle | |
| Other parameters | Swell SWH | ERA5 swell SWH |
| Wave direction | ERA5 wave direction | |
| Rainfall intensity | IMERG rainfall intensity |
| Architecture (Model) | Input Image | Input Auxiliary Parameters (Variables) |
|---|---|---|
| FCN1 | No | NBRCS, LES |
| FCN2 | No | NBRCS, LES, TES, SNR, incidence angle, receiver antenna gain |
| FCN3 | No | NBRCS, LES, TES, SNR, incidence angle, receiver antenna gain, longitude and latitude of specular point |
| FCN4 | No | NBRCS, LES, TES, SNR, incidence angle, receiver antenna gain, longitude and latitude of specular point, swell SWH, wave direction, rainfall intensity |
| CNN1 | BRCS DDM | No |
| CNN2 | power_analog | No |
| CNN3 | BRCS DDM, effective scattering area | NBRCS, LES, TES, SNR, incidence angle, receiver antenna gain, longitude and latitude of specular point |
| GloWS-Net | BRCS DDM, effective scattering area | NBRCS, LES, TES, SNR, incidence angle, receiver antenna gain, longitude and latitude of specular point, swell SWH, wave direction, rainfall intensity |
| Programming Language | Python 3.7 |
| Deep learning API | Tensorflow 2.3 and Keras 2.4 |
| CPU | Intel core i7-7700HQ |
| Running memory | 16 GB |
| GPU | GeForce GTX 1050Ti |
| Models | <10 m/s | 10–15 m/s | >15 m/s | 0–30 m/s | |||
|---|---|---|---|---|---|---|---|
| RMSE (m/s) | RMSE (m/s) | RMSE (m/s) | RMSE (m/s) | MAE (m/s) | CC | MAPE (%) | |
| NBRCS | 2.05 | 2.46 | 4.48 | 2.42 | 1.85 | 0.83 | 29.93 |
| LES | 2.26 | 2.54 | 4.65 | 2.71 | 1.98 | 0.70 | 32.41 |
| MVE | 2.23 | 2.42 | 4.29 | 2.53 | 1.98 | 0.81 | 30.64 |
| FCN1 | 2.48 | 2.52 | 4.08 | 2.66 | 2.08 | 0.80 | 31.69 |
| FCN2 | 1.78 | 2.02 | 3.33 | 2.03 | 1.57 | 0.89 | 23.40 |
| FCN3 | 1.61 | 2.13 | 3.42 | 1.99 | 1.52 | 0.89 | 22.63 |
| FCN4 | 1.76 | 1.89 | 2.89 | 1.92 | 1.48 | 0.90 | 24.78 |
| CNN1 | 1.71 | 2.59 | 4.68 | 2.37 | 1.81 | 0.85 | 25.72 |
| CNN2 | 2.05 | 2.46 | 4.54 | 2.46 | 1.90 | 0.82 | 28.64 |
| CNN3 | 1.81 | 2.18 | 2.81 | 2.02 | 1.53 | 0.89 | 21.91 |
| GloWS-Net | 1.69 | 2.10 | 2.68 | 1.92 | 1.43 | 0.90 | 20.67 |
| Models | <10 m/s | 10–15 m/s | >15 m/s | 0–30 m/s | |||
|---|---|---|---|---|---|---|---|
| RMSE (m/s) | RMSE (m/s) | RMSE (m/s) | RMSE (m/s) | MAE (m/s) | CC | MAPE (%) | |
| NBRCS | 2.23 | 2.58 | 4.53 | 2.61 | 2.06 | 0.81 | 30.89 |
| LES | 2.45 | 2.63 | 4.78 | 2.87 | 2.15 | 0.68 | 42.36 |
| MVE | 2.47 | 2.52 | 4.47 | 2.71 | 2.12 | 0.79 | 41.84 |
| FCN1 | 2.71 | 2.63 | 4.33 | 2.86 | 2.22 | 0.78 | 42.87 |
| FCN2 | 1.98 | 2.18 | 3.59 | 2.22 | 1.71 | 0.87 | 31.69 |
| FCN3 | 1.80 | 2.27 | 3.68 | 2.16 | 1.66 | 0.87 | 31.45 |
| FCN4 | 2.00 | 2.07 | 3.16 | 2.14 | 1.67 | 0.88 | 36.11 |
| CNN1 | 1.91 | 2.66 | 4.76 | 2.49 | 1.92 | 0.84 | 33.80 |
| CNN2 | 2.26 | 2.52 | 4.62 | 2.60 | 2.02 | 0.80 | 37.60 |
| CNN3 | 2.05 | 2.33 | 2.97 | 2.23 | 1.70 | 0.87 | 29.79 |
| GloWS-Net | 1.97 | 2.34 | 2.80 | 2.16 | 1.65 | 0.88 | 29.70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bu, J.; Yu, K.; Zuo, X.; Ni, J.; Li, Y.; Huang, W. GloWS-Net: A Deep Learning Framework for Retrieving Global Sea Surface Wind Speed Using Spaceborne GNSS-R Data. Remote Sens. 2023, 15, 590. https://doi.org/10.3390/rs15030590
Bu J, Yu K, Zuo X, Ni J, Li Y, Huang W. GloWS-Net: A Deep Learning Framework for Retrieving Global Sea Surface Wind Speed Using Spaceborne GNSS-R Data. Remote Sensing. 2023; 15(3):590. https://doi.org/10.3390/rs15030590
Chicago/Turabian StyleBu, Jinwei, Kegen Yu, Xiaoqing Zuo, Jun Ni, Yongfa Li, and Weimin Huang. 2023. "GloWS-Net: A Deep Learning Framework for Retrieving Global Sea Surface Wind Speed Using Spaceborne GNSS-R Data" Remote Sensing 15, no. 3: 590. https://doi.org/10.3390/rs15030590
APA StyleBu, J., Yu, K., Zuo, X., Ni, J., Li, Y., & Huang, W. (2023). GloWS-Net: A Deep Learning Framework for Retrieving Global Sea Surface Wind Speed Using Spaceborne GNSS-R Data. Remote Sensing, 15(3), 590. https://doi.org/10.3390/rs15030590