


Water Storage Variations Recovered from Global Navigation Satellite System Network Using Spatial Constraints: A Case Study of the Contiguous United States

Abstract
:
1. Introduction
2. Study Area and Datasets
2.1. Study Area
2.2. Datasets
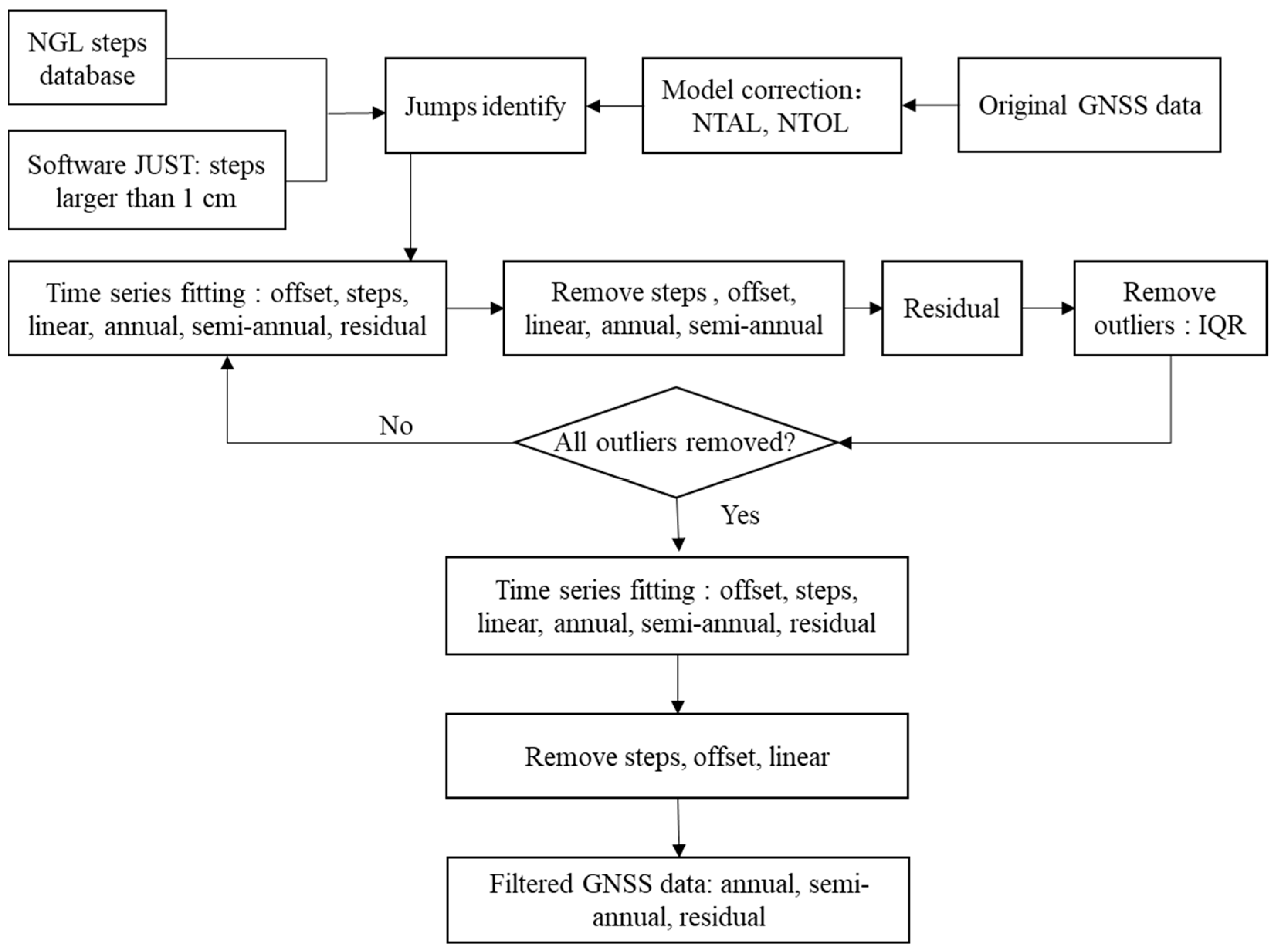
2.2.1. GNSS Vertical Displacements
2.2.2. GFO Time-Variable Solutions
2.2.3. Hydrological Models
2.2.4. Meteorological Precipitation Products
3. Methodology
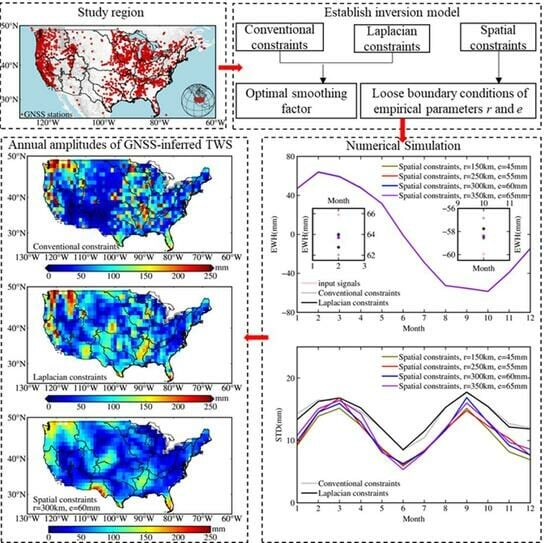
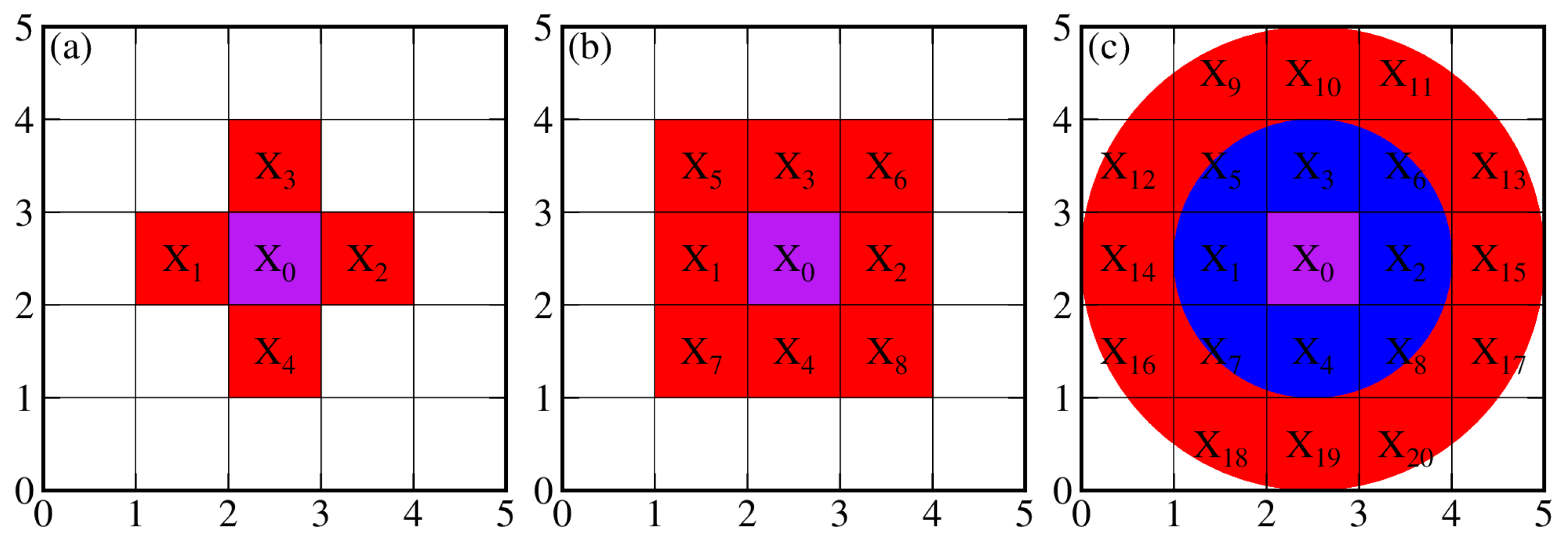
3.1. GNSS Inversion Method
3.2. Closed-Loop Simulation
4. Results and Analysis
4.1. Spatial Distributions of TWS
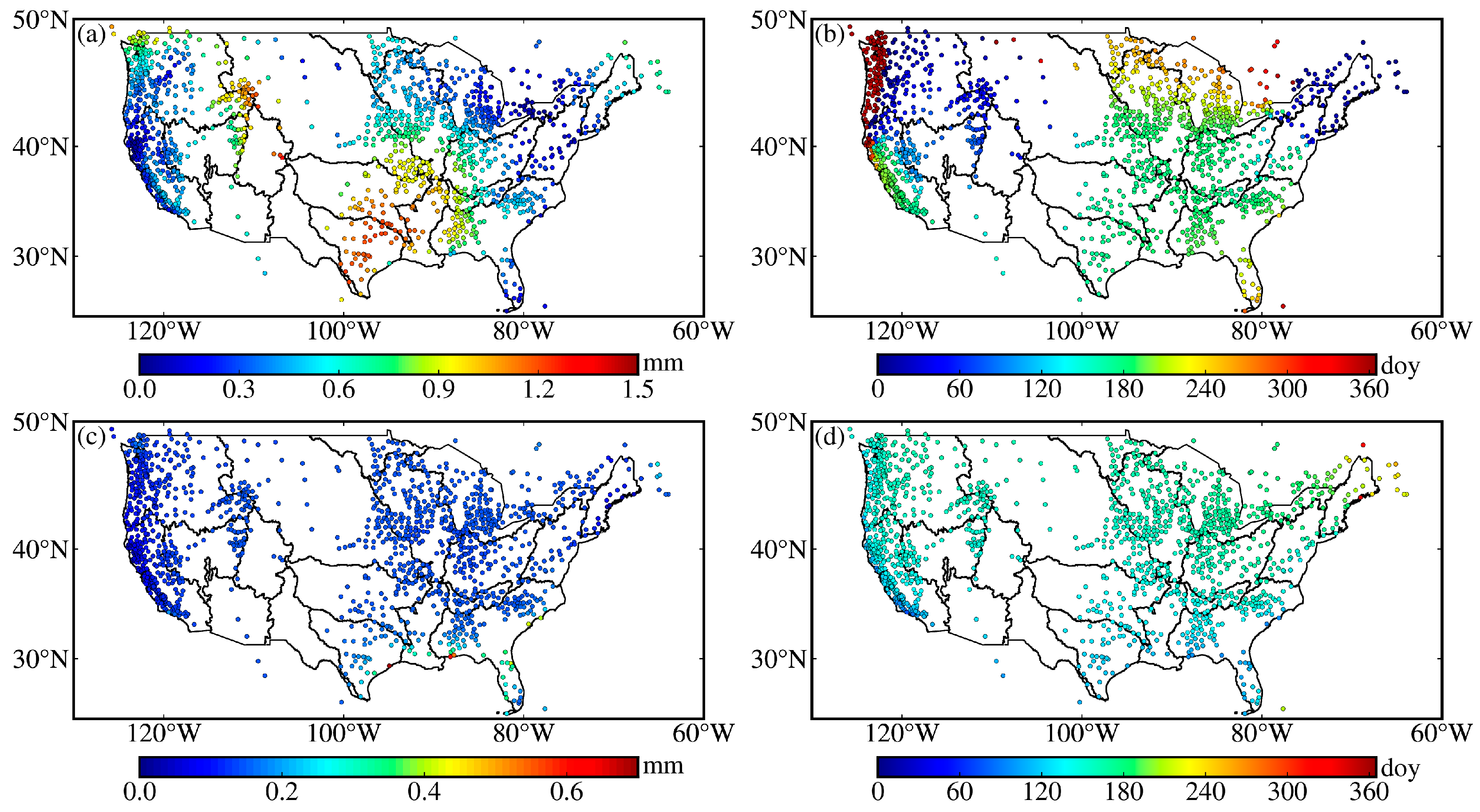
4.2. Temporal Variation Features of TWS
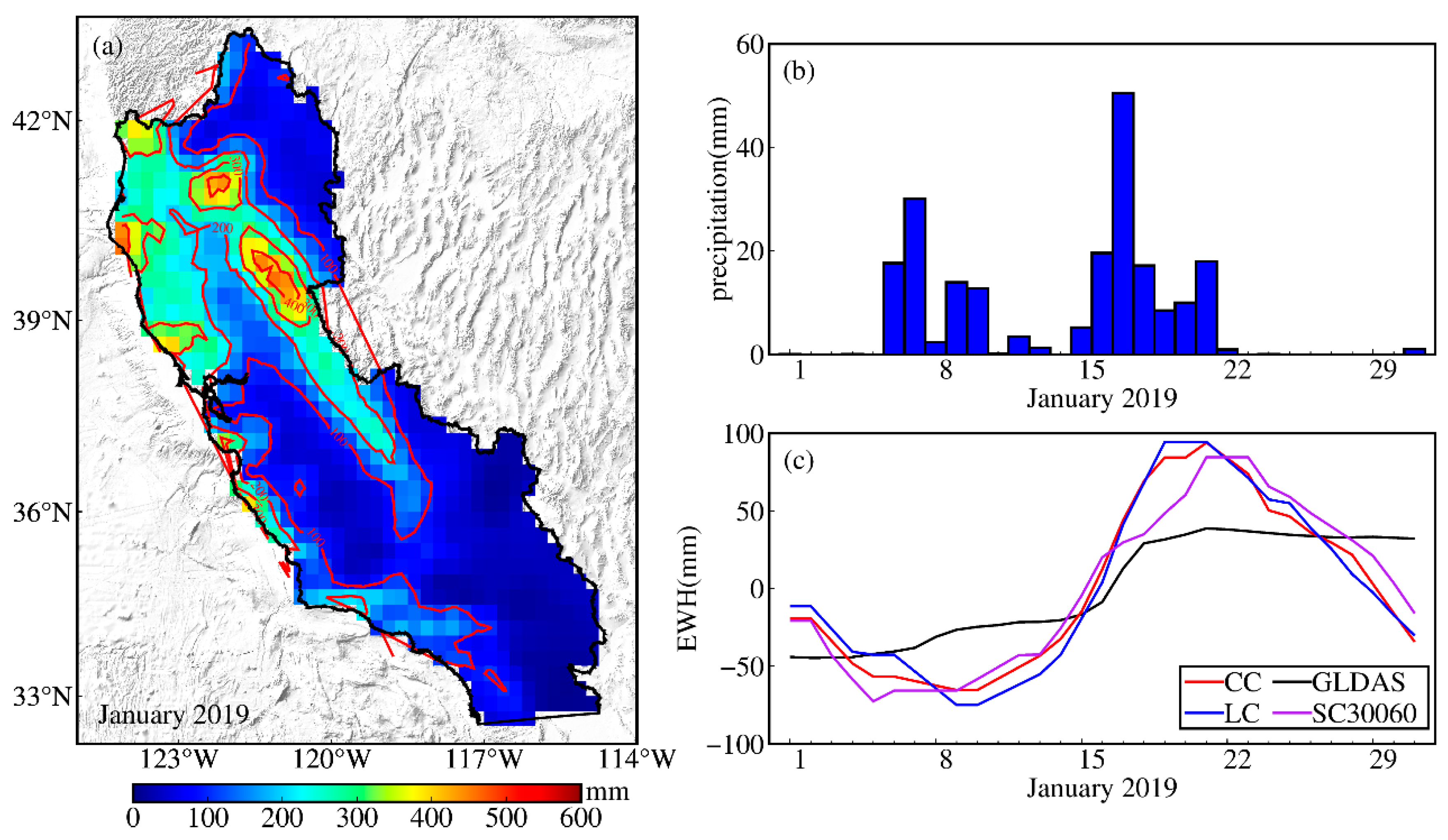
4.3. Identifying Extreme Precipitation Events in the California Watershed
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fu, Y.; Argus, D.F.; Landerer, F.W. GPS as an independent measurement to estimate terrestrial water storage variations in Washington and Oregon. J. Geophys. Res. Solid Earth 2015, 120, 552–566. [Google Scholar] [CrossRef]
- White, A.M.; Gardner, W.P.; Borsa, A.A.; Argus, D.F.; Martens, H.R. A review of GNSS/GPS in hydrogeodesy: Hydrologic loading applications and their implications for water resource research. Water Resour. Res. 2022, 58, e2022WR032078. [Google Scholar] [CrossRef] [PubMed]
- Tapley, B.D.; Watkins, M.M.; Flechtner, F.; Reigber, C.; Bettadpur, S.; Rodell, M.; Sasgen, I.; Famiglietti, J.S.; Landerer, F.W.; Chambers, D.P.; et al. Contributions of GRACE to understanding climate change. Nat. Clim. Chang. 2019, 9, 358–369. [Google Scholar] [CrossRef] [PubMed]
- Argus, D.F.; Fu, Y.; Landerer, F.W. Seasonal variation in total water storage in California inferred from GPS observations of vertical land motion. Geophys. Res. Lett. 2014, 41, 1971–1980. [Google Scholar] [CrossRef]
- Argus, D.F.; Landerer, F.W.; Wiese, D.N.; Martens, H.R.; Fu, Y.; Famiglietti, J.S.; Thomas, B.F.; Farr, T.G.; Moore, A.W.; Watkins, M.M. Sustained water loss in California’s mountain ranges during severe drought from 2012 to 2015 inferred from GPS. J. Geophys. Res. Solid Earth 2017, 122, 10559–10585. [Google Scholar] [CrossRef]
- Borsa, A.A.; Agnew, D.C.; Cayan, D.R. Ongoing drought-induced uplift in the western United States. Science 2014, 345, 1587–1590. [Google Scholar] [CrossRef]
- Farrell, W.E. Deformation of the Earth by surface loads. Rev. Geophys. 1972, 10, 761–797. [Google Scholar] [CrossRef]
- Wahr, J.; Khan, S.A.; van Dam, T.; Liu, L.; van Angelen, J.H.; van den Broeke, M.R.; Meertens, C.M. The use of GPS horizontals for loading studies, with applications to northern California and southeast Greenland. J. Geophys. Res. Solid Earth 2013, 118, 1795–1806. [Google Scholar] [CrossRef]
- Zhang, T.; Jin, S. Evapotranspiration variations in the Mississippi river basin estimated from GPS observations. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4694–4701. [Google Scholar] [CrossRef]
- Enzminger, T.L.; Small, E.E.; Borsa, A.A. Accuracy of snow water equivalent estimated from GPS vertical displacements: A synthetic loading case study for western U.S. mountains. Water Resour. Res. 2018, 54, 581–599. [Google Scholar] [CrossRef]
- Enzminger, T.L.; Small, E.E.; Borsa, A.A. Subsurface water dominates Sierra Nevada seasonal hydrologic storage. Geophys. Res. Lett. 2019, 46, 11993–12001. [Google Scholar] [CrossRef]
- Shen, Y.; Yan, H.; Peng, P.; Feng, W.; Zhang, Z.; Song, Y.; Bai, X. Boundary-included enhanced water storage changes inferred by GPS in the Pacific rim of the western United States. Remote Sens. 2020, 12, 2429. [Google Scholar] [CrossRef]
- Zhang, B.; Yao, Y.; Fok, H.S.; Hu, Y.; Chen, Q. Potential seasonal terrestrial water storage monitoring from GPS vertical displacements: A case study in the lower three-rivers headwater region, China. Sensors 2016, 16, 1526. [Google Scholar] [CrossRef] [PubMed]
- Hsu, Y.-J.; Fu, Y.; Bürgmann, R.; Hsu, S.-Y.; Lin, C.-C.; Tang, C.-H.; Wu, Y.-M. Assessing seasonal and interannual water storage variations in Taiwan using geodetic and hydrological data. Earth Planet. Sci. Lett. 2020, 550, 116532. [Google Scholar] [CrossRef]
- Lai, Y.R.; Wang, L.; Bevis, M.; Fok, H.S.; Alanazi, A. Truncated singular value decomposition regularization for estimating terrestrial water storage changes using GPS: A case study over Taiwan. Remote Sens. 2020, 12, 3861. [Google Scholar] [CrossRef]
- Zhong, B.; Li, X.; Chen, J.; Li, Q.; Liu, T. Surface mass variations from GPS and GRACE/GFO: A case study in southwest China. Remote Sens. 2020, 12, 1835. [Google Scholar] [CrossRef]
- Jiang, Z.; Hsu, Y.-J.; Yuan, L.; Huang, D. Monitoring time-varying terrestrial water storage changes using daily GNSS measurements in Yunnan, southwest China. Remote Sens. Environ. 2021, 254, 112249. [Google Scholar] [CrossRef]
- Shen, Y.; Zheng, W.; Yin, W.; Xu, A.; Zhu, H.; Yang, S.; Su, K. Inverted algorithm of terrestrial water-storage anomalies based on machine learning combined with load model and its application in southwest China. Remote Sens. 2021, 13, 3358. [Google Scholar] [CrossRef]
- Liu, B.; Yu, W.; Dai, W.; Xing, X.; Kuang, C. Estimation of terrestrial water storage variations in Sichuan-Yunnan region from GPS observations using independent component analysis. Remote Sens. 2022, 14, 282. [Google Scholar] [CrossRef]
- Li, X.; Zhong, B.; Li, J.; Liu, R. Inversion of terrestrial water storage changes from GNSS vertical displacements using a priori constraint: A case study of the Yunnan province, China. J. Hydrol. 2023, 617, 129126. [Google Scholar] [CrossRef]
- Han, S.-C.; Razeghi, S.M. GPS recovery of daily hydrologic and atmospheric mass variation: A methodology and results from the Australian continent. J. Geophys. Res.-Solid Earth 2017, 122, 9328–9343. [Google Scholar] [CrossRef]
- Jiang, Z.; Hsu, Y.-J.; Yuan, L.; Cheng, S.; Li, Q.; Li, M. Estimation of daily hydrological mass changes using continuous GNSS measurements in mainland China. J. Hydrol. 2021, 598, 126349. [Google Scholar] [CrossRef]
- Jiang, Z.; Hsu, Y.-J.; Yuan, L.; Cheng, S.; Feng, W.; Tang, M.; Yang, X. Insights into hydrological drought characteristics using GNSS-inferred large-scale terrestrial water storage deficits. Earth Planet. Sci. Lett. 2022, 578, 117294. [Google Scholar] [CrossRef]
- Tang, M.; Yuan, L.; Jiang, Z.; Yang, X.; Li, C.; Liu, W. Characterization of hydrological droughts in Brazil using a novel multiscale index from GNSS. J. Hydrol. 2023, 617, 128934. [Google Scholar] [CrossRef]
- Li, X.; Zhong, B.; Li, J.; Liu, R. Inversion of GNSS vertical displacements for terrestrial water storage changes using Slepian basis functions. Earth Space Sci. 2023, 10, e2022EA002608. [Google Scholar] [CrossRef]
- Yang, X.; Yuan, L.; Jiang, Z.; Tang, M.; Feng, X.; Li, C. Investigating terrestrial water storage changes in southwest China by integrating GNSS and GRACE/GRACE-FO observations. J. Hydrol.-Reg. Stud. 2023, 48, 101457. [Google Scholar] [CrossRef]
- Adusumilli, S.; Borsa, A.A.; Fish, M.A.; McMillan, H.K.; Silverii, F. A decade of water storage changes across the contiguous United States from GPS and satellite gravity. Geophys. Res. Lett. 2019, 46, 13006–13015. [Google Scholar] [CrossRef]
- Argus, D.F.; Martens, H.R.; Borsa, A.A.; Knappe, E.; Wiese, D.N.; Alam, S.; Anderson, M.; Khatiwada, A.; Lau, N.; Peidou, A.; et al. Subsurface water flux in California’s Central Valley and its source watershed from space geodesy. Geophys. Res. Lett. 2022, 49, e2022GL099583. [Google Scholar] [CrossRef]
- Carlson, G.; Werth, S.; Shirzaei, M. Joint inversion of GNSS and GRACE for terrestrial water storage change in California. J. Geophys. Res. Solid Earth 2022, 127, e2021JB023135. [Google Scholar] [CrossRef]
- Fok, H.S.; Liu, Y. An improved GPS-inferred seasonal terrestrial water storage using terrain-corrected vertical crustal displacements constrained by GRACE. Remote Sens. 2019, 11, 1433. [Google Scholar] [CrossRef]
- Liu, Y.; Fok, H.S.; Tenzer, R.; Chen, Q.; Chen, X. Akaike’s Bayesian information criterion for the joint inversion of terrestrial water storage using GPS vertical displacements, GRACE and GLDAS in southwest china. Entropy 2019, 21, 664. [Google Scholar] [CrossRef]
- Li, X.; Zhong, B.; Li, J.; Liu, R. Joint inversion of GNSS and GRACE/GFO data for terrestrial water storage changes in the Yangtze river basin. Geophys. J. Int. 2023, 233, 1596–1616. [Google Scholar] [CrossRef]
- Milliner, C.; Materna, K.; Bürgmann, R.; Fu, Y.; Moore, A.W.; Bekaert, D.; Adhikari, S.; Argus, D.F. Tracking the weight of Hurricane Harvey’s stormwater using GPS data. Sci. Adv. 2018, 4, eaau2477. [Google Scholar] [CrossRef]
- Hansen, P.C.; O’Leary, D.P. The use of the l-curve in the regularization of discrete ill-posed problems. SIAM J. Sci. Comput. 1993, 14, 1487–1503. [Google Scholar] [CrossRef]
- Golub, G.H.; Heath, M.; Wahba, G. Generalized cross-validation as a method for choosing a good ridge parameter. Technometrics 1979, 21, 215–223. [Google Scholar] [CrossRef]
- Seaber, P.R.; Kapinos, F.P.; Knapp, G.L. Hydrologic Unit Maps; 2294. 1987. Available online: http://pubs.er.usgs.gov/publication/wsp2294 (accessed on 15 December 2022).
- Bertiger, W.; Bar-Sever, Y.; Dorsey, A.; Haines, B.; Harvey, N.; Hemberger, D.; Heflin, M.; Lu, W.; Miller, M.; Moore, A.W.; et al. Gipsyx/rtgx, a new tool set for space geodetic operations and research. Adv. Space Res. 2020, 66, 469–489. [Google Scholar] [CrossRef]
- Blewitt, G.; Hammond, W.C.; Kreemer, C. Harnessing the GPS Data Explosion for Interdisciplinary Science, Eos, 2018, 99. Available online: https://eos.org/science-updates/harnessing-the-gps-data-explosion-for-interdisciplinary-science (accessed on 18 December 2022).
- Argus, D.F.; Peltier, W.R.; Blewitt, G.; Kreemer, C. The viscosity of the top third of the lower mantle estimated using GPS, GRACE, and relative sea level measurements of glacial isostatic adjustment. J. Geophys. Res. Solid Earth 2021, 126, e2020JB021537. [Google Scholar] [CrossRef]
- Lau, N.; Borsa, A.A.; Becker, T.W. Present-day crustal vertical velocity field for the contiguous United States. J. Geophys. Res. Solid Earth 2020, 125, e2020JB020066. [Google Scholar] [CrossRef]
- Johnson, C.W.; Fu, Y.; Bürgmann, R. Seasonal water storage, stress modulation, and California seismicity. Science 2017, 356, 1161–1164. [Google Scholar] [CrossRef] [PubMed]
- Johnson, C.W.; Fu, Y.; Bürgmann, R. Stress models of the annual hydrospheric, atmospheric, thermal, and tidal loading cycles on California faults: Perturbation of background stress and changes in seismicity. J. Geophys. Res. Solid Earth 2017, 122, 10605–10625. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Z.; van Dam, T.; Ding, W. Comparative analysis of different environmental loading methods and their impacts on the GPS height time series. J. Geodesy 2013, 87, 687–703. [Google Scholar] [CrossRef]
- Li, C.; Huang, S.; Chen, Q.; Dam, T.v.; Fok, H.S.; Zhao, Q.; Wu, W.; Wang, X. Quantitative evaluation of environmental loading induced displacement products for correcting GNSS time series in CMONOC. Remote Sens. 2020, 12, 594. [Google Scholar] [CrossRef]
- Dill, R.; Dobslaw, H. Numerical simulations of global-scale high-resolution hydrological crustal deformations. J. Geophys. Res. Solid Earth 2013, 118, 5008–5017. [Google Scholar] [CrossRef]
- Ghaderpour, E. Just: MATLAB and python software for change detection and time series analysis. GPS Solut. 2021, 25, 85. [Google Scholar] [CrossRef]
- Nikolaidis, R.M. Observation of Geodetic and Seismic Deformation with the Global Positioning System. Ph.D. Thesis, University of California San Diego, San Diego, CA, USA, 2002. [Google Scholar]
- Save, H.; Bettadpur, S.; Tapley, B.D. High-resolution CSR GRACE RL05 mascons. J. Geophys. Res. Solid Earth 2016, 121, 7547–7569. [Google Scholar] [CrossRef]
- Zhang, L.; Tang, H.; Chang, L.; Sun, W. Performance of GRACE mascon solutions in studying seismic deformations. J. Geophys. Res. Solid Earth 2020, 125, e2020JB019510. [Google Scholar] [CrossRef]
- Swenson, S.; Chambers, D.; Wahr, J. Estimating geocenter variations from a combination of GRACE and ocean model output. J. Geophys. Res. Solid Earth 2008, 113, B08410. [Google Scholar] [CrossRef]
- Sun, Y.; Riva, R.; Ditmar, P. Optimizing estimates of annual variations and trends in geocenter motion and J2 from a combination of GRACE data and geophysical models. J. Geophys. Res. Solid Earth 2016, 121, 8352–8370. [Google Scholar] [CrossRef]
- Rodell, M.; Houser, P.R.; Jambor, U.; Gottschalck, J.; Mitchell, K.; Meng, C.-J.; Arsenault, K.; Cosgrove, B.; Radakovich, J.; Bosilovich, M.; et al. The global land data assimilation system. Bull. Amer. Meteorol. Soc. 2004, 85, 381–394. [Google Scholar] [CrossRef]
- Chen, M.; Xie, P.; Janowiak, J.E.; Arkin, P.A. Global land precipitation: A 50-y monthly analysis based on gauge observations. J. Hydrometeorol. 2002, 3, 249–266. [Google Scholar] [CrossRef]
- Chen, M.; Shi, W.; Xie, P.; Silva, V.B.S.; Kousky, V.E.; Wayne Higgins, R.; Janowiak, J.E. Assessing objective techniques for gauge-based analyses of global daily precipitation. J. Geophys. Res. Atmos. 2008, 113, D04110. [Google Scholar] [CrossRef]
- Xie, P.; Chen, M.; Yang, S.; Yatagai, A.; Hayasaka, T.; Fukushima, Y.; Liu, C. A gauge-based analysis of daily precipitation over east asia. J. Hydrometeorol. 2007, 8, 607–626. [Google Scholar] [CrossRef]
- Dziewonski, A.M.; Anderson, D.L. Preliminary reference Earth model. Phys. Earth Planet. Inter. 1981, 25, 297–356. [Google Scholar] [CrossRef]
- Wang, H.; Xiang, L.; Jia, L.; Jiang, L.; Wang, Z.; Hu, B.; Gao, P. Load love numbers and Green’s functions for elastic Earth models PREM, iasp91, ak135, and modified models with refined crustal structure from Crust 2.0. Comput. Geosci. 2012, 49, 190–199. [Google Scholar] [CrossRef]
- Mu, D.; Yan, H.; Feng, W.; Peng, P. GRACE leakage error correction with regularization technique: Case studies in Greenland and Antarctica. Geophys. J. Int. 2017, 208, 1775–1786. [Google Scholar] [CrossRef]
- Segall, P.; Harris, R. Slip deficit on the San Andreas Fault at Parkfield, California, as revealed by inversion of geodetic data. Science 1986, 233, 1409–1413. [Google Scholar] [CrossRef]
- Khorrami, M.; Shirzaei, M.; Ghobadi-Far, K.; Werth, S.; Carlson, G.; Zhai, G. Groundwater volume loss in Mexico City constrained by InSAR and GRACE observations and mechanical models. Geophys. Res. Lett. 2023, 50, e2022GL101962. [Google Scholar] [CrossRef]
- Yan, H.; Chen, W.; Zhu, Y.; Zhang, W.; Zhong, M. Contributions of thermal expansion of monuments and nearby bedrock to observed gps height changes. Geophys. Res. Lett. 2009, 36, L13301. [Google Scholar] [CrossRef]
- Rodell, M.; Li, B. Changing intensity of hydroclimatic extreme events revealed by GRACE and GRACE-FO. Nat. Water 2023, 1, 241–248. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| HUC-2 | Watershed | Area (km2) | n |
|---|---|---|---|
| 1 | New England | 171,083 | 17 |
| 2 | Mid Atlantic | 301,894 | 26 |
| 3 | South Atlantic–Gulf | 713,806 | 104 |
| 4 | Great Lakes | 466,972 | 138 |
| 5 | Ohio | 428,693 | 80 |
| 6 | Tennessee | 107,319 | 27 |
| 7 | Upper Mississippi | 491,732 | 139 |
| 8 | Lower Mississippi | 262,302 | 28 |
| 9 | Souris–Red–Rainy | 154,068 | 23 |
| 10 | Missouri | 1,346,773 | 101 |
| 11 | Arkansas–White–Red | 646,504 | 42 |
| 12 | Texas–Gulf | 467,444 | 34 |
| 13 | Rio Grande | 354,447 | 2 |
| 14 | Upper Colorado | 307,390 | 5 |
| 15 | Lower Colorado | 390,390 | 3 |
| 16 | Great Basin | 402,552 | 58 |
| 17 | Pacific Northwest | 779,423 | 227 |
| 18 | California | 477,853 | 265 |
| CONUS | 8,270,645 | 1315 |
| Constraint Strategy | Amplitude (mm) | Average STDs (mm) |
|---|---|---|
| input | 52.59 | |
| CC | 50.06 | 14 |
| LC | 50.21 | 14 |
| SC15045 | 51.03 | 11 |
| SC20045 | 50.76 | 12 |
| SC25055 | 50.74 | 11 |
| SC30060 | 50.82 | 11 |
| SC35065 | 50.76 | 11 |
| SC40060 | 50.68 | 13 |
| SC45075 | 51.00 | 12 |
| SC50075 | 50.89 | 12 |
| HUC-2 | Amplitude (mm) | ||||
|---|---|---|---|---|---|
| CC | LC | SC30060 | GFO | GLDAS | |
| 1 | 28.76 ± 8.79 | 30.41 ± 9.21 | 41.74 ± 8.79 | 97.23 ± 9.02 | 111.64 ± 6.08 |
| 2 | 45.15 ± 7.75 | 45.78 ± 8.21 | 39.64 ± 7.93 | 43.44 ± 8.81 | 66.71 ± 5.58 |
| 3 | 20.48 ± 7.39 | 25.64 ± 7.83 | 27.00 ± 8.44 | 55.28 ± 7.58 | 39.98 ± 5.47 |
| 4 | 14.14 ± 10.62 | 13.09 ± 10.90 | 10.73 ± 11.07 | 24.39 ± 11.65 | 87.47 ± 5.09 |
| 5 | 37.62 ± 6.02 | 38.29 ± 5.81 | 35.42 ± 5.61 | 80.32 ± 4.35 | 79.47 ± 4.60 |
| 6 | 79.22 ± 14.62 | 75.02 ± 13.72 | 63.71 ± 10.42 | 107.65 ± 6.91 | 86.12 ± 5.93 |
| 7 | 28.14 ± 8.57 | 26.43 ± 7.74 | 26.56 ± 7.87 | 62.72 ± 7.64 | 53.78 ± 7.87 |
| 8 | 94.58 ± 10.85 | 106.70 ± 11.71 | 96.79 ± 11.40 | 133.45 ± 10.23 | 86.09 ± 7.11 |
| 9 | 51.49 ± 9.93 | 72.96 ± 10.38 | 71.22 ± 11.01 | 40.26 ± 9.78 | 39.88 ± 9.19 |
| 10 | 33.52 ± 7.94 | 36.08 ± 9.44 | 37.14 ± 8.86 | 47.08 ± 8.32 | 25.94 ± 4.52 |
| 11 | 26.39 ± 9.45 | 13.89 ± 12.10 | 23.72 ± 11.33 | 58.11 ± 7.49 | 36.97 ± 6.96 |
| 12 | 38.58 ± 11.52 | 37.23 ± 11.68 | 30.87 ± 11.80 | 41.84 ± 8.72 | 30.56 ± 8.37 |
| 13 | 18.90 ± 4.97 | 39.68 ± 12.52 | 88.14 ± 10.78 | 17.38 ± 7.24 | 4.41 ± 2.84 |
| 14 | 34.14 ± 7.32 | 48.91 ± 10.89 | 62.10 ± 9.78 | 59.90 ± 5.83 | 26.94 ± 3.09 |
| 15 | 27.27 ± 6.99 | 72.49 ± 12.95 | 47.36 ± 10.53 | 28.36 ± 5.90 | 12.19 ± 3.38 |
| 16 | 15.72 ± 9.64 | 26.19 ± 10.39 | 11.81 ± 9.89 | 58.31 ± 7.41 | 42.84 ± 3.16 |
| 17 | 94.74 ± 9.06 | 96.90 ± 9.12 | 89.12 ± 8.86 | 113.62 ± 3.59 | 119.56 ± 3.70 |
| 18 | 54.43 ± 11.38 | 58.79 ± 11.64 | 56.38 ± 12.05 | 81.63 ± 8.81 | 86.97 ± 5.07 |
| CONUS | 22.28 ± 5.78 | 21.55 ± 6.09 | 21.13 ± 6.10 | 60.65 ± 4.55 | 51.61 ± 3.03 |
| HUC-2 | STD (mm) | ||
|---|---|---|---|
| CC | LC | SC30060 | |
| 1 | 69 | 70 | 65 |
| 2 | 55 | 57 | 55 |
| 3 | 51 | 53 | 55 |
| 4 | 46 | 48 | 47 |
| 5 | 40 | 38 | 39 |
| 6 | 86 | 78 | 57 |
| 7 | 57 | 56 | 54 |
| 8 | 51 | 47 | 51 |
| 9 | 45 | 54 | 54 |
| 10 | 41 | 42 | 42 |
| 11 | 48 | 53 | 47 |
| 12 | 61 | 63 | 56 |
| 13 | 47 | 83 | 87 |
| 14 | 46 | 64 | 53 |
| 15 | 43 | 82 | 64 |
| 16 | 64 | 72 | 64 |
| 17 | 54 | 55 | 54 |
| 18 | 64 | 63 | 65 |
| CONUS | 37 | 37 | 38 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, P.; Mu, D.; Xu, T. Water Storage Variations Recovered from Global Navigation Satellite System Network Using Spatial Constraints: A Case Study of the Contiguous United States. Remote Sens. 2023, 15, 5753. https://doi.org/10.3390/rs15245753
Yin P, Mu D, Xu T. Water Storage Variations Recovered from Global Navigation Satellite System Network Using Spatial Constraints: A Case Study of the Contiguous United States. Remote Sensing. 2023; 15(24):5753. https://doi.org/10.3390/rs15245753
Chicago/Turabian StyleYin, Peng, Dapeng Mu, and Tianhe Xu. 2023. "Water Storage Variations Recovered from Global Navigation Satellite System Network Using Spatial Constraints: A Case Study of the Contiguous United States" Remote Sensing 15, no. 24: 5753. https://doi.org/10.3390/rs15245753
APA StyleYin, P., Mu, D., & Xu, T. (2023). Water Storage Variations Recovered from Global Navigation Satellite System Network Using Spatial Constraints: A Case Study of the Contiguous United States. Remote Sensing, 15(24), 5753. https://doi.org/10.3390/rs15245753