1. Introduction
Synthetic aperture radar (SAR) is a high-resolution imaging technology which has the properties of all-time and all-weather use. Early SAR was mainly used in space and in the air for battlefield reconnaissance, resource exploration, territorial surveys, ocean surveillance and other remote scenarios [
1]. In recent years, with the continuous development of hardware and software technology, short-range radar has seen huge developments. At present, short-range radar (SRR) has become a necessary technology in human production and life, and is widely used in automobile safety, industrial automation, medical care, robotics, and security systems [
2,
3,
4,
5,
6]. Considering the advantages of SRR, with its high resolution and high precision in detecting and analyzing objects, researchers have gradually combined it with SAR imaging technology to produce SRR SAR, such as near-field mini-UAV SAR [
5,
7,
8,
9] and vehicle SAR [
10]. This combination of technologies further broadens the field of SRR applications and is of important research value.
However, in order to achieve the characteristics of miniaturization, millimeter-wave (MMW) radar with an FMCW system [
5,
6,
7,
8] is generally used, which generally has a long pulse duration and produces a wider radar beam due to the micro-strip antenna. The above problems may make traditional imaging algorithms inapplicable.
Synthetic aperture technology relies on the relative motion between the radar array phase center (APC) and the target scene. Traditional SAR technology is generally based on the stop-and-go hypothesis; that is, the position change of the APC during signal transmission and reception is not considered. However, when the pulse duration is longer in a frequency-modulated continuous wave (FMCW) system, the position change is not negligible and can affect the accurate focusing of the scene. Papers [
11,
12] derived an FMCW SAR signal model and theoretically pointed out that continuous movement in the pulse of the aircraft carrier platform would cause an additional range migration term. The additional range migration value is related to the Doppler frequency, and based on this, an improved range Doppler algorithm (RDA) was proposed. Based on the same idea, the improved frequency scaling algorithm (FSA) [
13] and range migration algorithm (RMA) [
14] were proposed. Considering that the time domain algorithm has the best imaging accuracy and is not limited by the motion trajectory, the improved back projection algorithm (BPA) was proposed in [
15] to eliminate the IPM. Subsequently, a modified fast back projection algorithm (FBPA) [
16] was proposed to mitigate the problem of the low efficiency of the BPA proposed in [
15]. However, its efficiency is still lower than that of the frequency domain algorithm. Thus, only the frequency domain algorithm is discussed for the pursuit of imaging efficiency in this paper.
Frequency domain imaging algorithms always have a certain dependence on the beam width of the radar. In order to make the energy more concentrated, a narrow beam is generally used in traditional long-range radar (LRR) for long-range detection, while a wider beam is always needed to achieve a wider coverage in SRR SAR. A wide azimuth beam may cause serious two-dimensional coupling (TDC), which will make the traditional SAR imaging algorithm ineffective. Previous studies mainly consider a low-frequency ultra-wideband (UWB) SAR system in the P or L band, which has quite a high fractional bandwidth and wide-beam characteristics. Due to the consideration of imaging efficiency and imaging accuracy, a nonlinear chirp scaling (NCS) algorithm suitable for a UWB SAR system is proposed in [
17] to eliminate the range-variant property of the quadratic coupling term and the range-invariant third-order coupling term; however, the range-variant properties of the third-order coupling term and the higher-order coupling term are ignored. To solve this problem, a generalized chirp scaling (GCS) algorithm is proposed in [
18]. It is more suitable for a UWB SAR system because of the consideration of all higher-order coupling terms. However, the FSA should be used instead of the CS algorithm in an MMW SRR system with a Dechirp echo receiving mode. Ref. [
19] adopts the same idea as NCS to present a squint FSA considering the range-variant property of the quadratic coupling term. However, there are few reports on the higher-order coupling terms of the FSA in SRR. Furthermore, there is another issue in that the frequency scaling operation in the FSA may cause range frequency aliasing in some cases. Ref. [
20] points out the aliasing phenomenon in the squint mode and eliminates it by introducing a new residual video phase (RVP) item and a skew factor. For the wide-beam mode, whether the frequency scaling process will cause aliasing or not remains to be determined.
For SRR SAR systems, it is known that the signal carrier frequency is in the MMW band; this means that the fractional bandwidth is very small. Taking a typical 77 GHz MMW radar system as an example, even if its range bandwidth reaches 4 GHz, the fractional bandwidth can still be ignored. Therefore, although SRR has a wide azimuth beam, the degree of TDC is still unclear. When the degree of coupling is unknown, the RMA can be used. It is a more accurate frequency imaging algorithm that does not need to consider the high-order TDC terms due to directly processing in the spherical modulation phase. However, Stolt interpolation processing will cause range time domain folding because of the Dechirp system, especially in the case of a wide azimuth beam, so it is also not suitable for SRR SAR imaging. If the range azimuth coupling degree in SRR is small, the RDA and FSA can be greatly simplified to achieve SRR SAR imaging.
In order to obtain an imaging algorithm suitable for SRR SAR, in this paper, the echo property of SRR SAR signals is first analyzed based on the background of short-range millimeter-wave SAR imaging, including both the IPM caused by the continuous frequency modulation system and the TDC in the case of a wide azimuth beam. The negligibility of the IPM and high-order TDC term in SRR is pointed out. Subsequently, the RDA ignoring the higher-order coupling term is presented, and then the frequency aliasing problem caused by frequency scaling in the FSA and the time folding problem caused by Stolt interpolation in RMA are analyzed. Finally, the modified FSA and RMA suitable for SRR SAR are proposed by introducing a skew factor into the frequency scaling function directly and extending the range time domain before Stolt interpolation, respectively. In order to verify the feasibility of the proposed algorithm ignoring high-order coupling terms under a wide azimuth beam and the effectiveness of the proposed improved algorithm, both simulation data and real measurement data are used.
The rest of this paper is organized as follows.
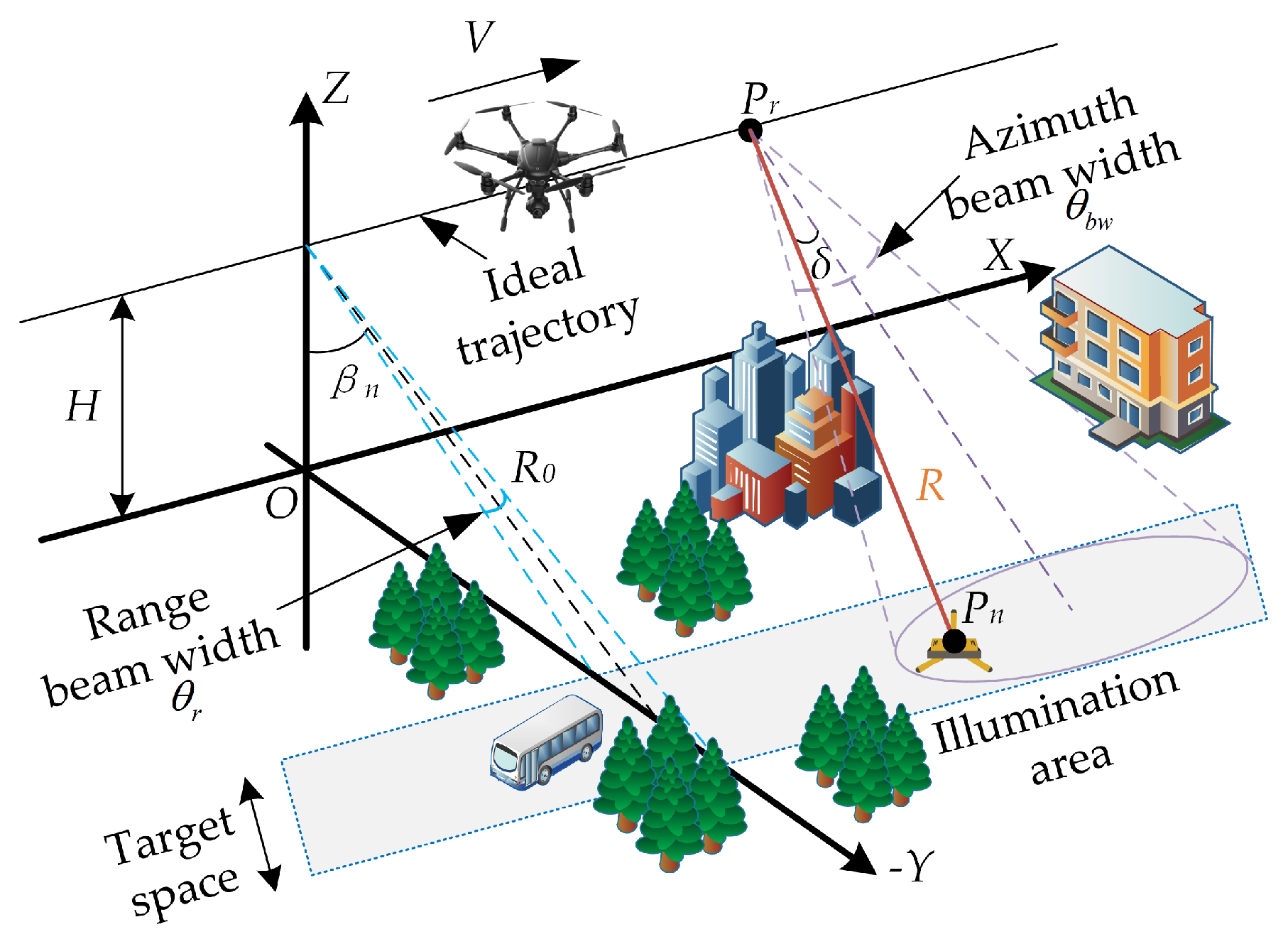
Section 2 introduces the geometry model of SRR SAR imaging. The details of IPM and TDC are also discussed in this section. In
Section 3, the three SAR imaging algorithms for SRR SAR are described detail. The experimental results including simulation data and real measured data in W-band SRR SAR are provided in
Section 4. Some discussions are made in
Section 5.
Section 6 provides a conclusion for the entire paper.
4. Results
This section reports some simulation and real data experiments to prove the effectiveness of the proposed algorithms. The simulation environment of the experiment was a Win10 operating system (i7-11800H CPU@2.3 GHz), the system memory was 32 GB, and the simulation software was MATLAB R2021b. The crucial simulation parameters are shown in
Table 2. There are five ideal point targets in the scene, and the locations are (0 m, −18 m, 0 m), (−5 m, −18 m, 0 m), (5 m, −18 m, 0 m), (0 m, −14 m, 0 m), and (0 m, −22 m, 0 m), respectively. The first point target is located in the center of the scene.
4.1. Range Doppler Algorithm
Firstly, the simulation experiment of the RDA was carried out.
Figure 6 shows the range migration curve of the central target after RCMC. It can be seen that the existence of residual range migration is caused by IPM, and it disappears after IPM compensation.
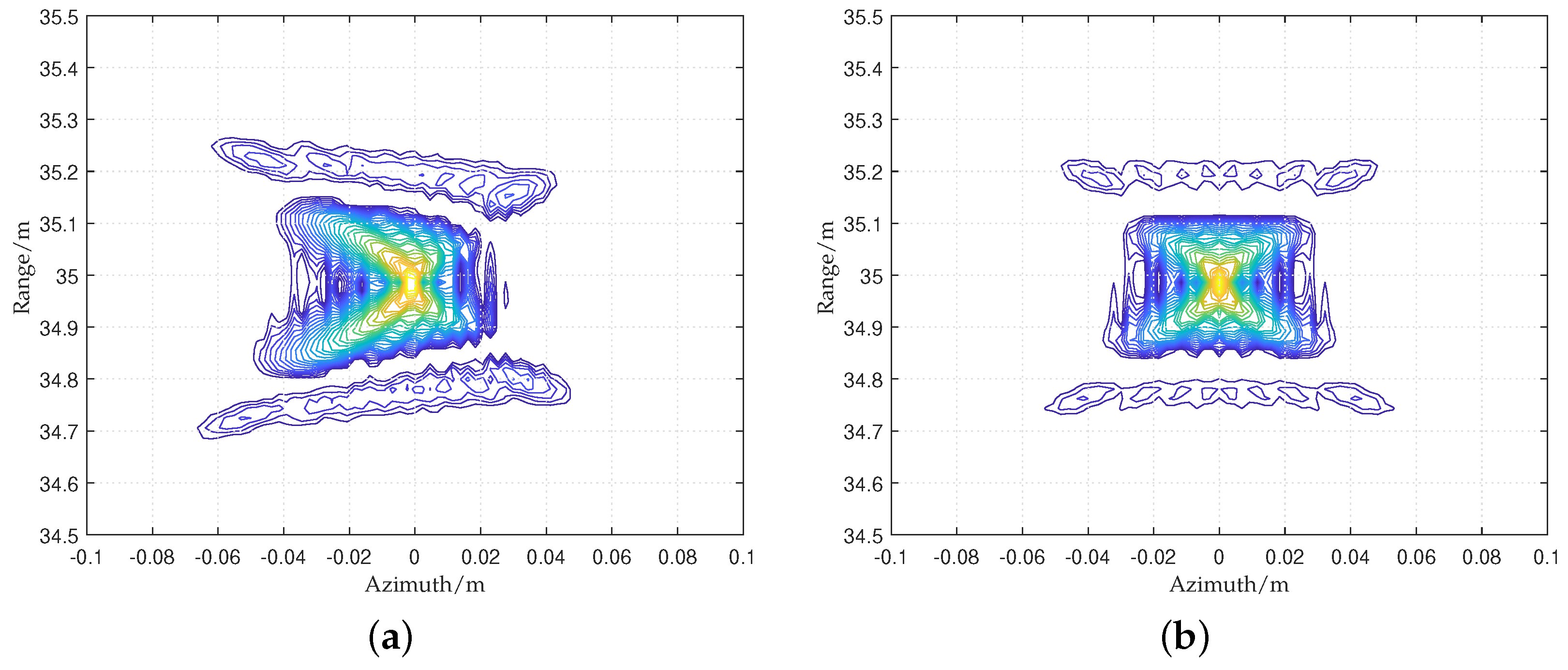
Figure 7 shows the imaging results before and after IPM compensation.
As can be seen from the focusing results in
Figure 7, the existence of the IPM will affect high-precision focusing, and the target is effectively focused after IPM compensation. It is worth noting that the final imaging results are reflected as non-orthogonal side lobes due to the non-orthogonal spectrum support region (
Section 4.3). Since only the central target of the scene is considered, the RDA of the bulk RCMC is used in the above experiments.
Section 3.1 points out that for the FMCW wide-beam RDA, Sinc interpolation should be used for RCMC correction.
Figure 8 shows the range migration curve of the target in the non-central target obtained using two kinds of RCMC methods.
The bulk RCMC in
Figure 8 does not completely correct the range migration of the non-central target, and its accuracy is lower than that of Sinc interpolation. Although the Sinc interpolation is inefficient due to the interpolation operation, it can be accelerated by calling the Sinc interpolation table.
Table 3 gives the operation times of all RCMC methods, and it can be seen that the acceleration effect of calling the interpolation table is remarkable. The final focusing result is shown in
Figure 9.
Figure 9 shows the focusing results of two kinds of RDAs. It can be seen that the target is effectively focused after the range migration is fully corrected.
Table 4 gives the relevant indicators of range and azimuth profiles at the focusing center, including resolution (Res), peak side lobe ratio (PSLR), and integral side lobe ratio (ISLR).
From
Table 4, it can be seen that the RDA discussed in
Section 3.1 can accurately focus the five targets. It is worth noting that there are non-orthogonal side lobes in the focusing results. This result is caused by the non-orthogonal two-dimensional spectral support region, and a detailed illustration can be seen in
Section 4.3.
4.2. The Frequency Scaling Algorithm
The effectiveness of the proposed FSA is analyzed and verified as follows, and the IPM is compensated for in the experiments.
Figure 10 shows the range frequency aliasing caused by the frequency scaling operation in SRR SAR. The proposed FSA eliminates the aliasing by introducing a skew factor
M, which can be adjusted according to the degree of aliasing. In the simulations,
M was set to 40 and the aliasing was eliminated.
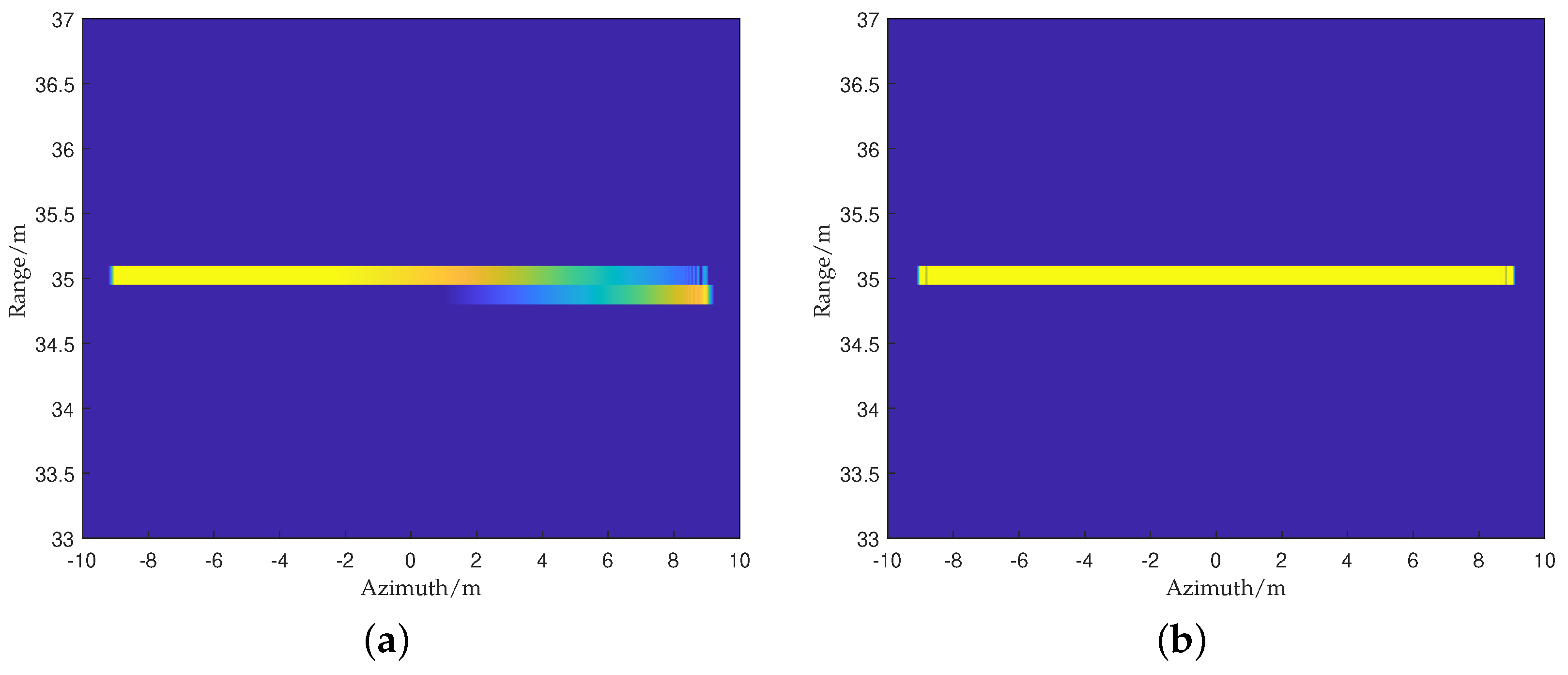
Figure 11 shows the RCMC results of the central and range non-central targets. In the following content, the range non-central target is denoted by the non-central target. It can be seen that the FSA can remove the range-variant property of the migration curves using a scaling operation instead of Sinc interpolation. The running time is similar to the bulk RCMC, but it has a higher imaging accuracy.
Figure 12 shows the comparison of the results focused using the traditional FSA and the proposed FSA. There is serious resolution loss and a certain amount of energy dispersion in the results focused using the traditional FSA due to range frequency aliasing.
The proposed FSA can obtain good focus results because aliasing is avoided by introducing the skew factor.
Figure 13 shows the imaging results of targets 4 and 5. For further analysis, the relevant indicators of the five targets are proposed in
Table 5, where the SFSA denotes the proposed FSA.
The above experiments not only prove the effectiveness of the proposed FSA for eliminating the range aliasing, but they also prove that the FSA has a higher accuracy than the RDA using bulk RCMC and a higher efficiency than the RDA using Sinc interpolation. Furthermore, the introduction of the skew factor does not add extra computation, so it can be set flexibly.
4.3. The Range Migration Algorithm
There is no approximation for the spherical modulation phase in RMA; therefore, it has a higher imaging accuracy than the RDA and FSA. However, the wide-beam problem in SRR SAR will cause range time folding after performing Stolt interpolation. The proposed RMA avoids the folding by extending the range time domain before Stolt interpolation, thus achieving accurate imaging.
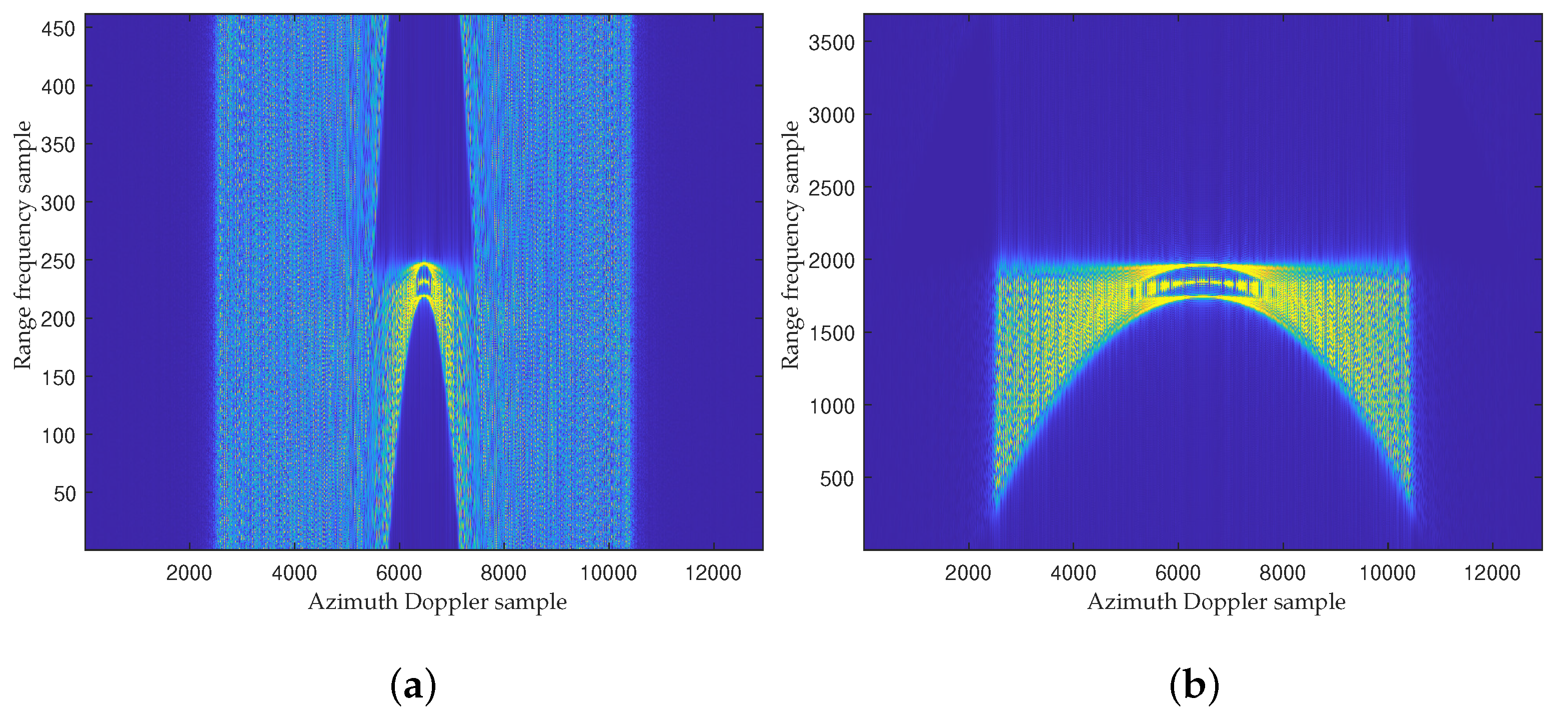
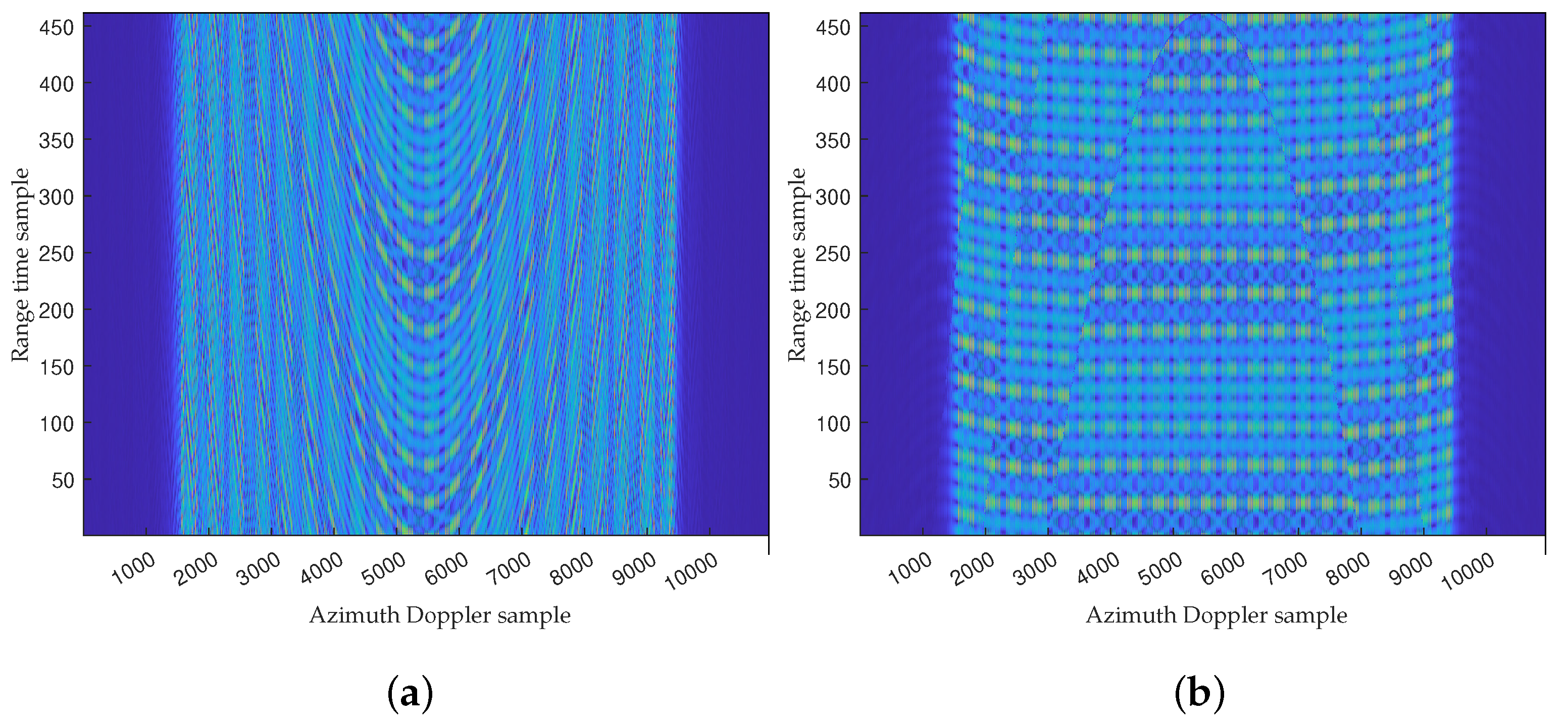
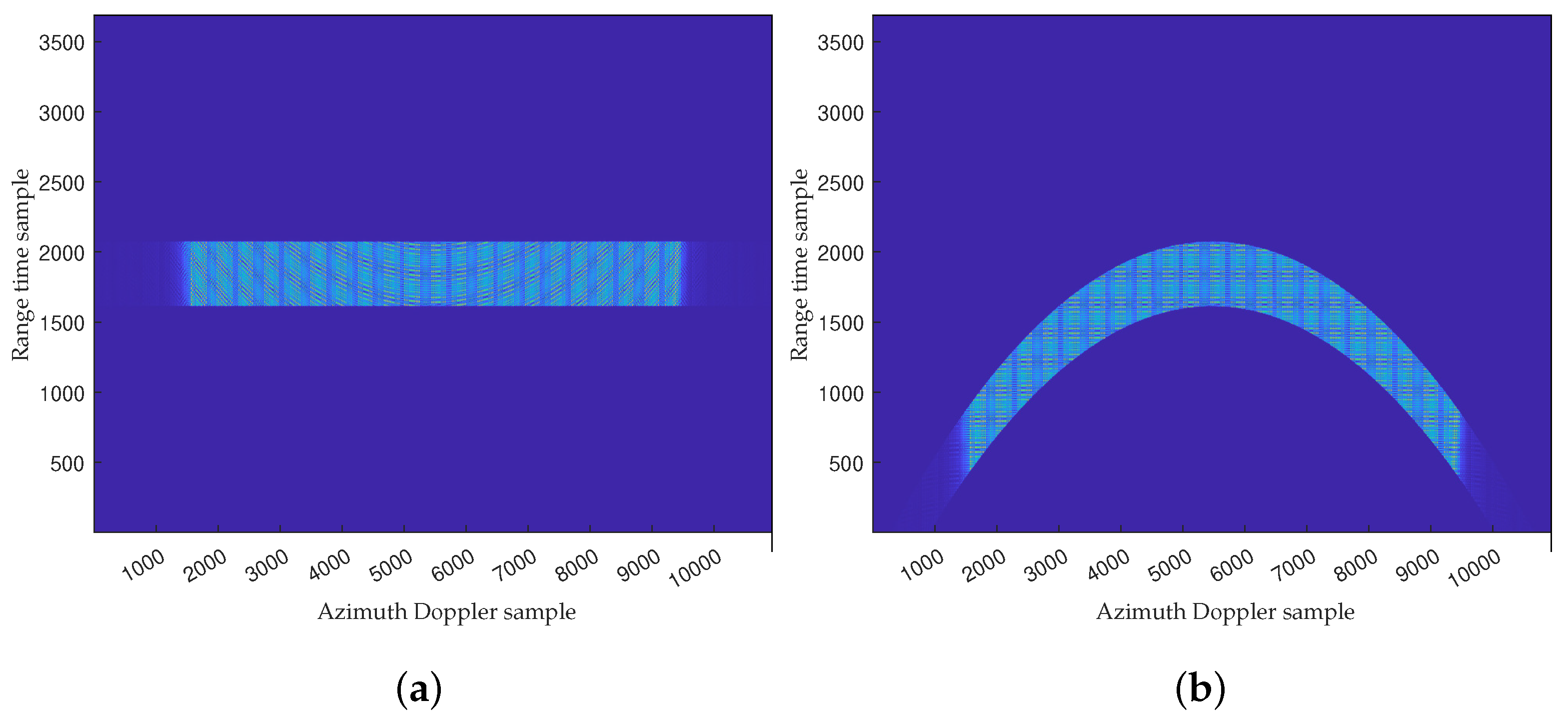
Figure 14 shows the two-dimensional support region of the range time and Doppler domain before and after Stolt interpolation.
Figure 14 shows that the two-dimensional support spectrum of the echo is a rectangular spectrum before Stolt interpolation with full time width. The full time width leads to range time folding after the Stolt interpolation operation, so a focused SAR image cannot be obtained.
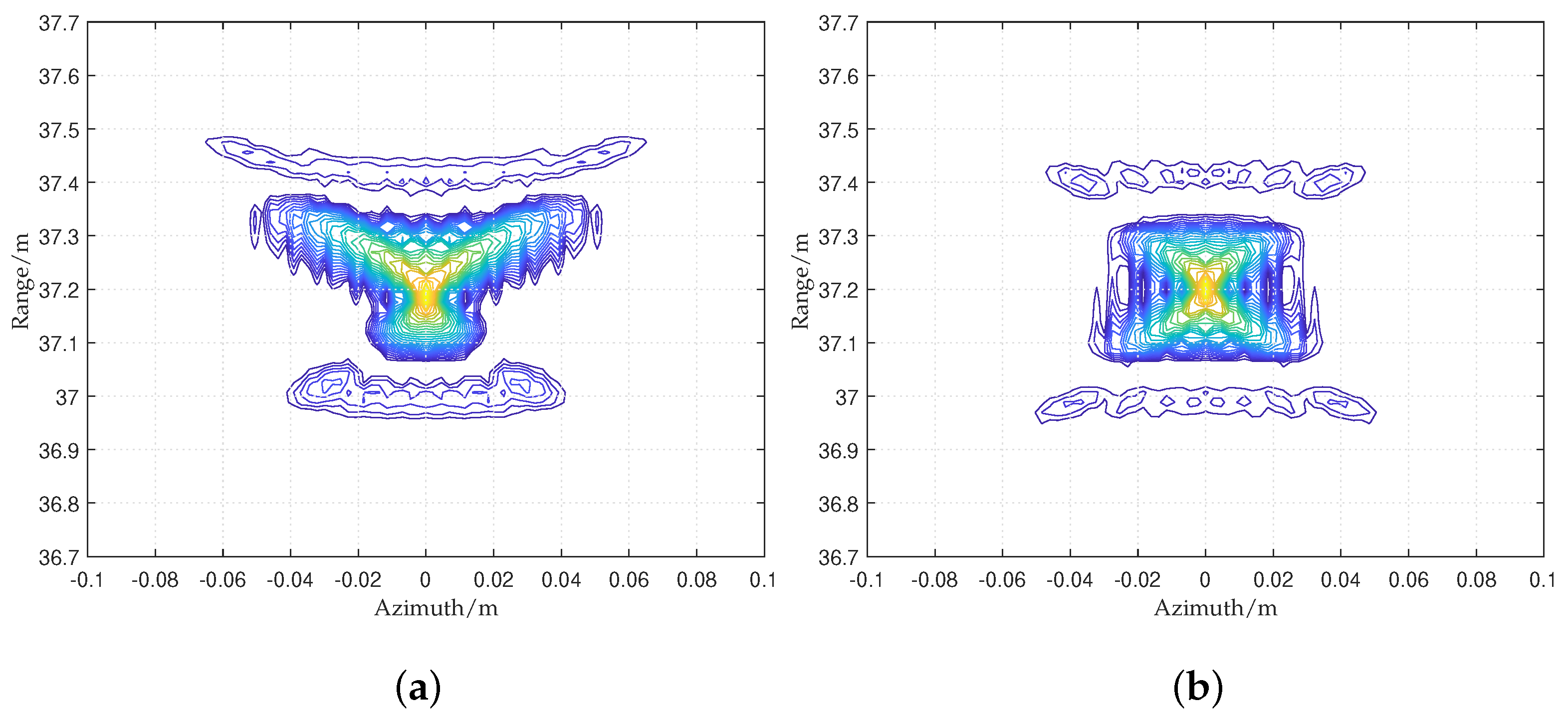
Figure 15 shows how the range time extension method solves the above problem. As can be seen from
Figure 15, the folding phenomenon in the range time domain is eliminated, and the SAR image can be obtained directly using range FFT and azimuth IFFT. It should be emphasized that the shape of the support region has a serious non-orthogonal phenomenon as shown in
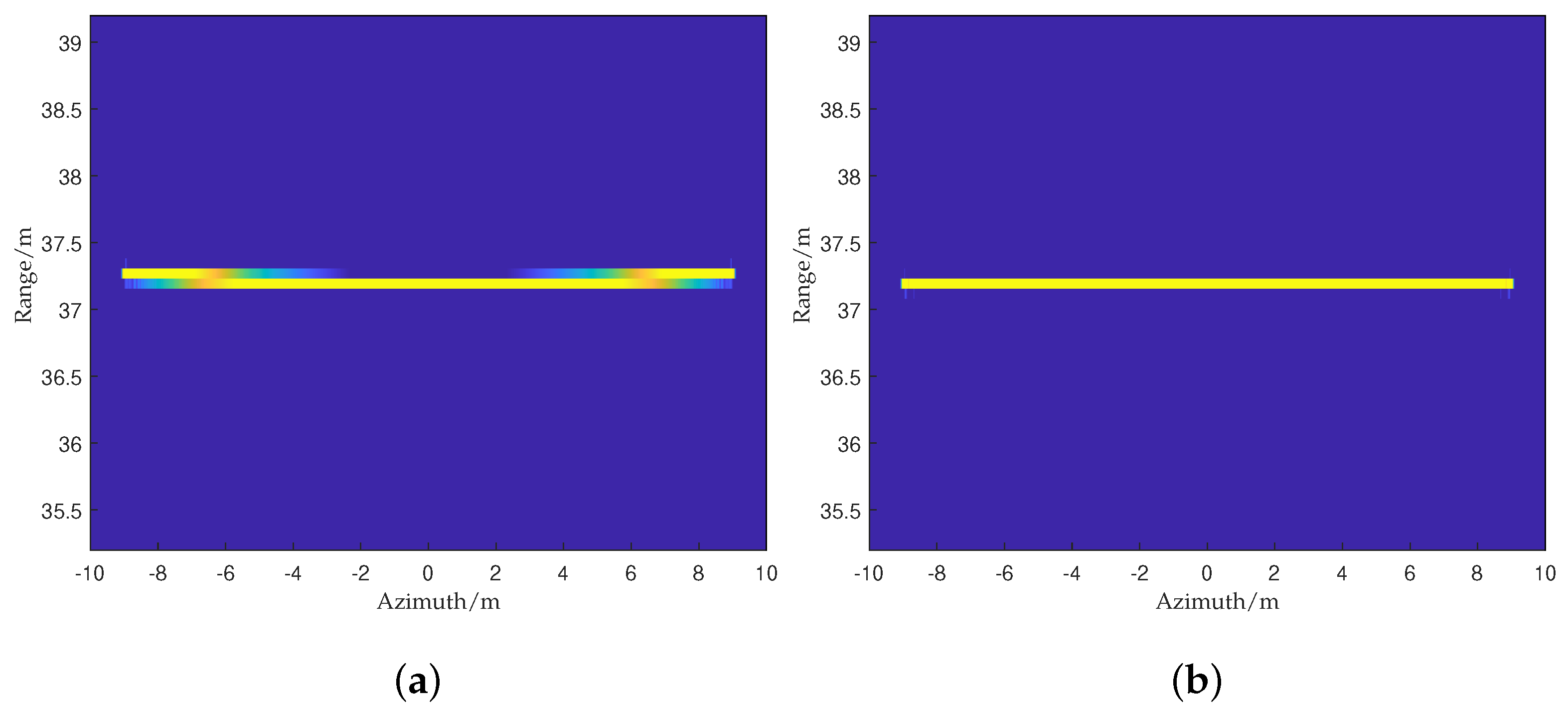
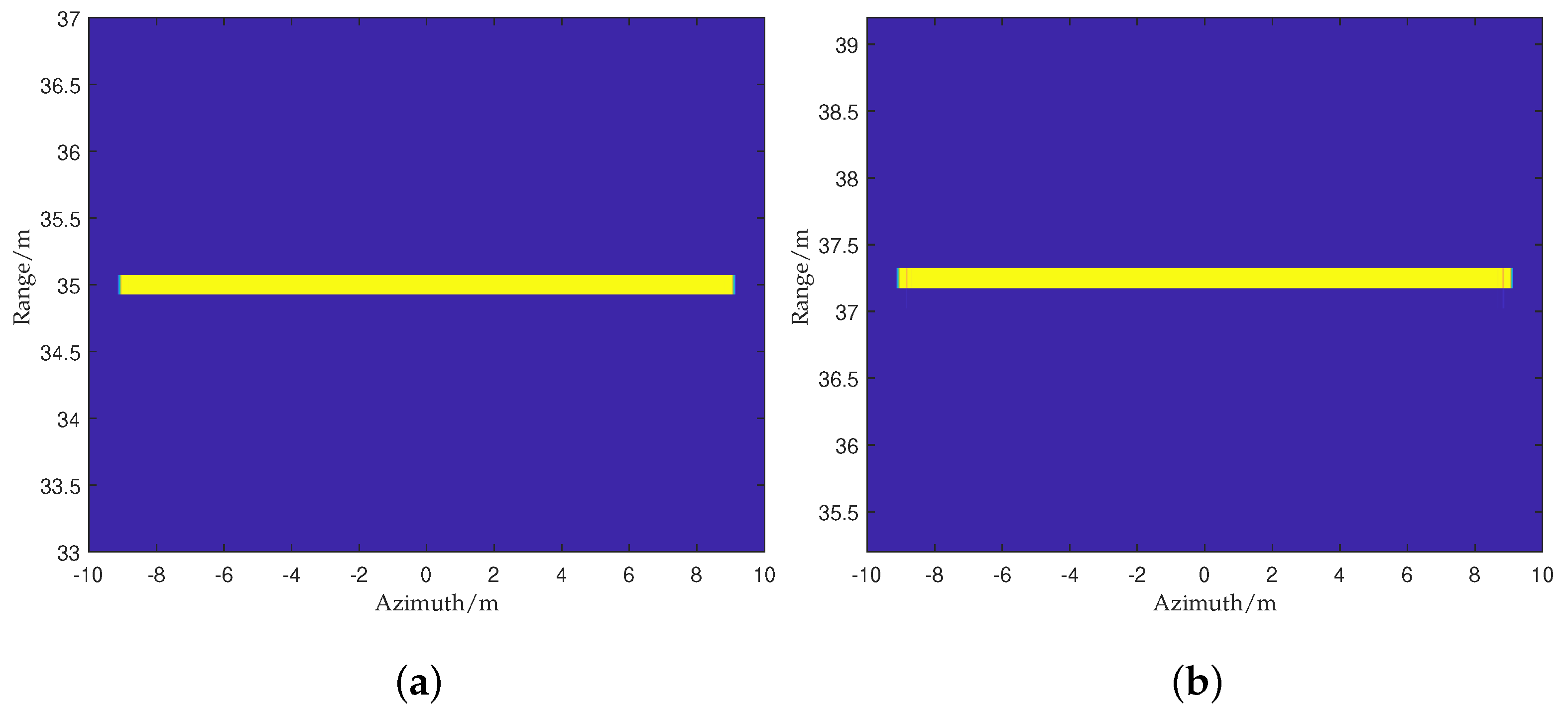
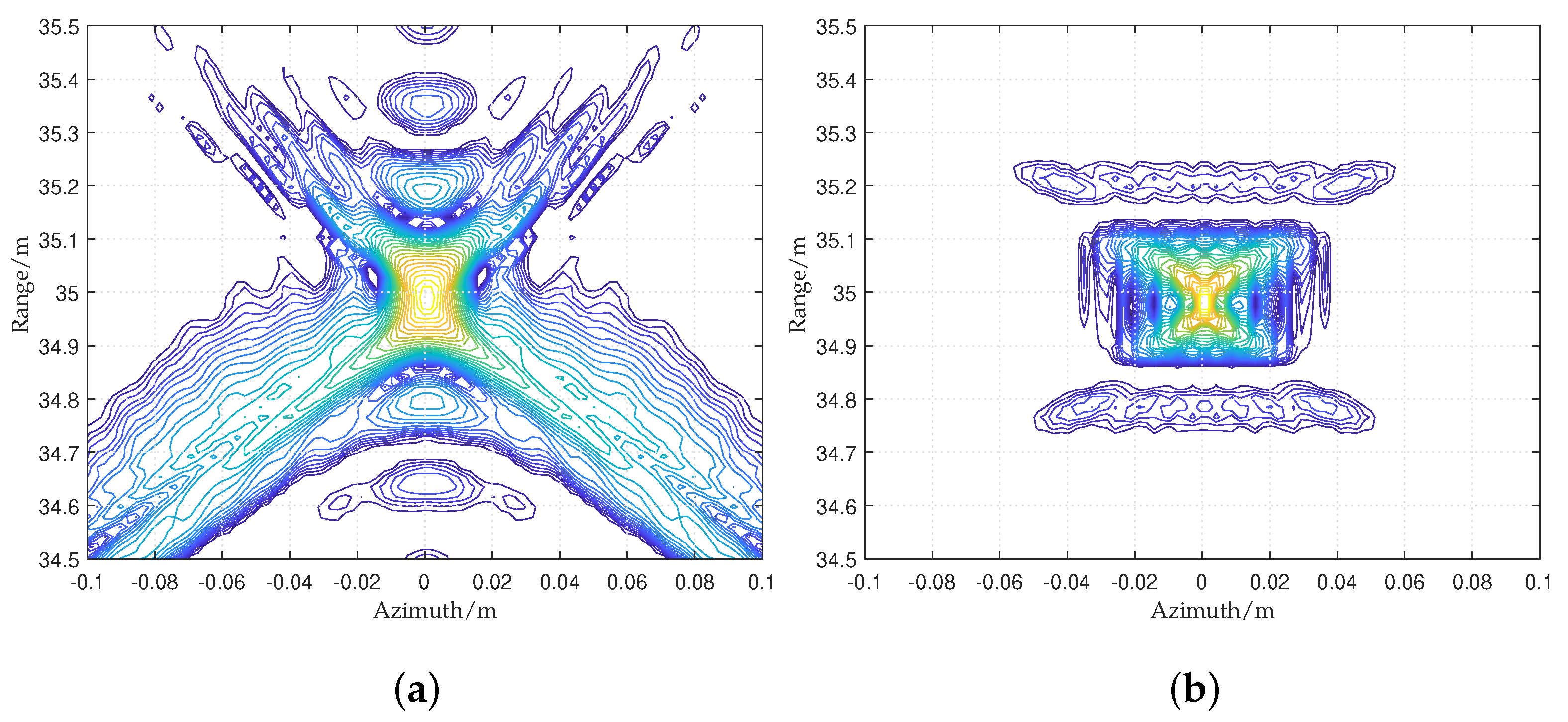
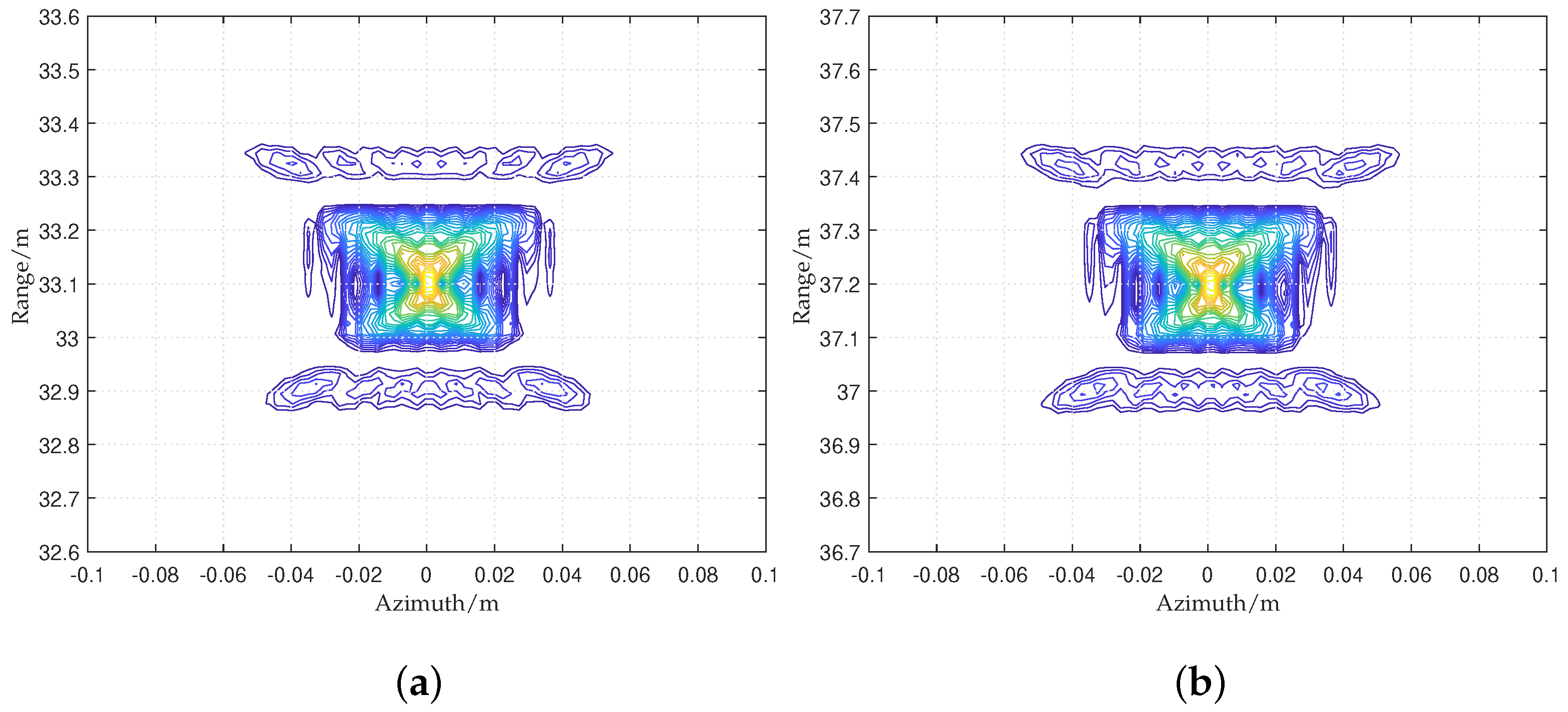
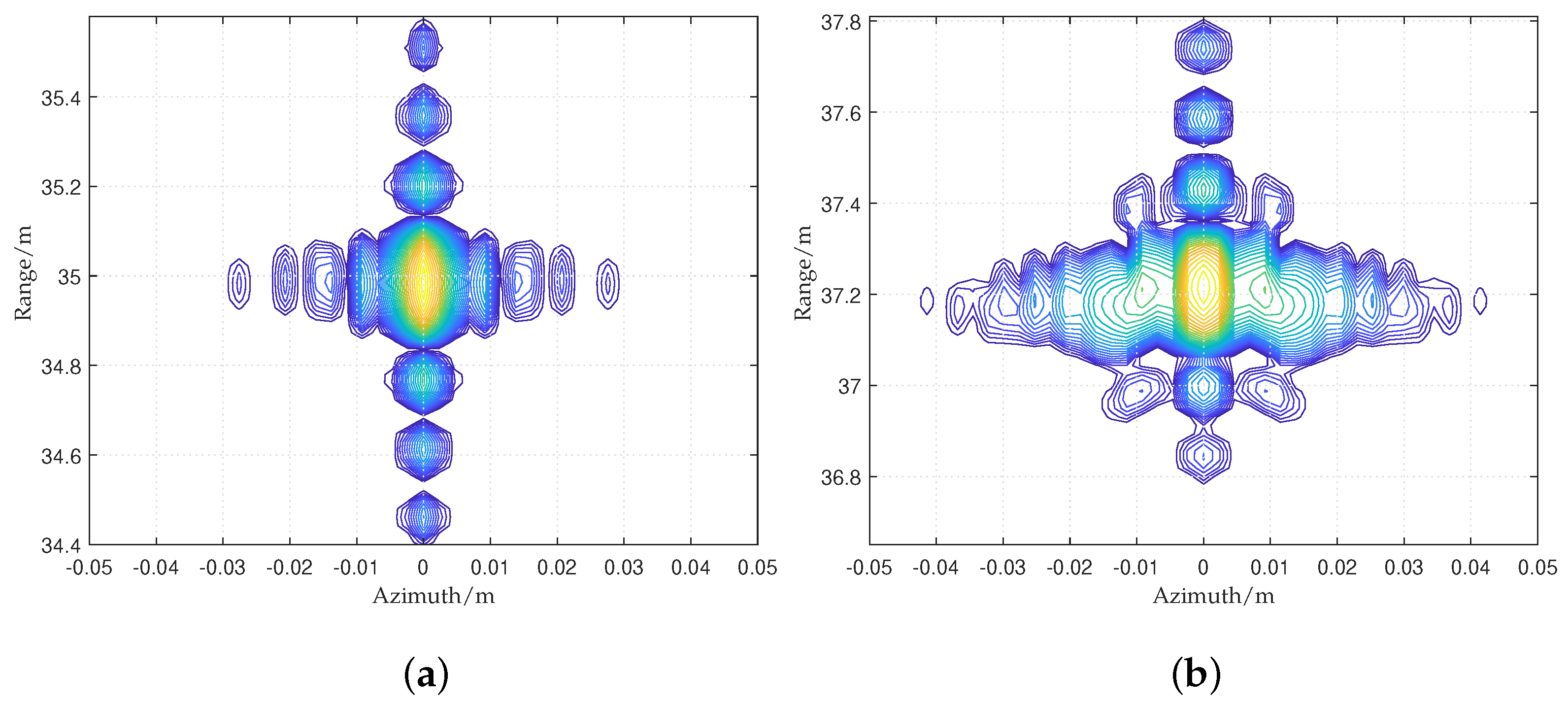
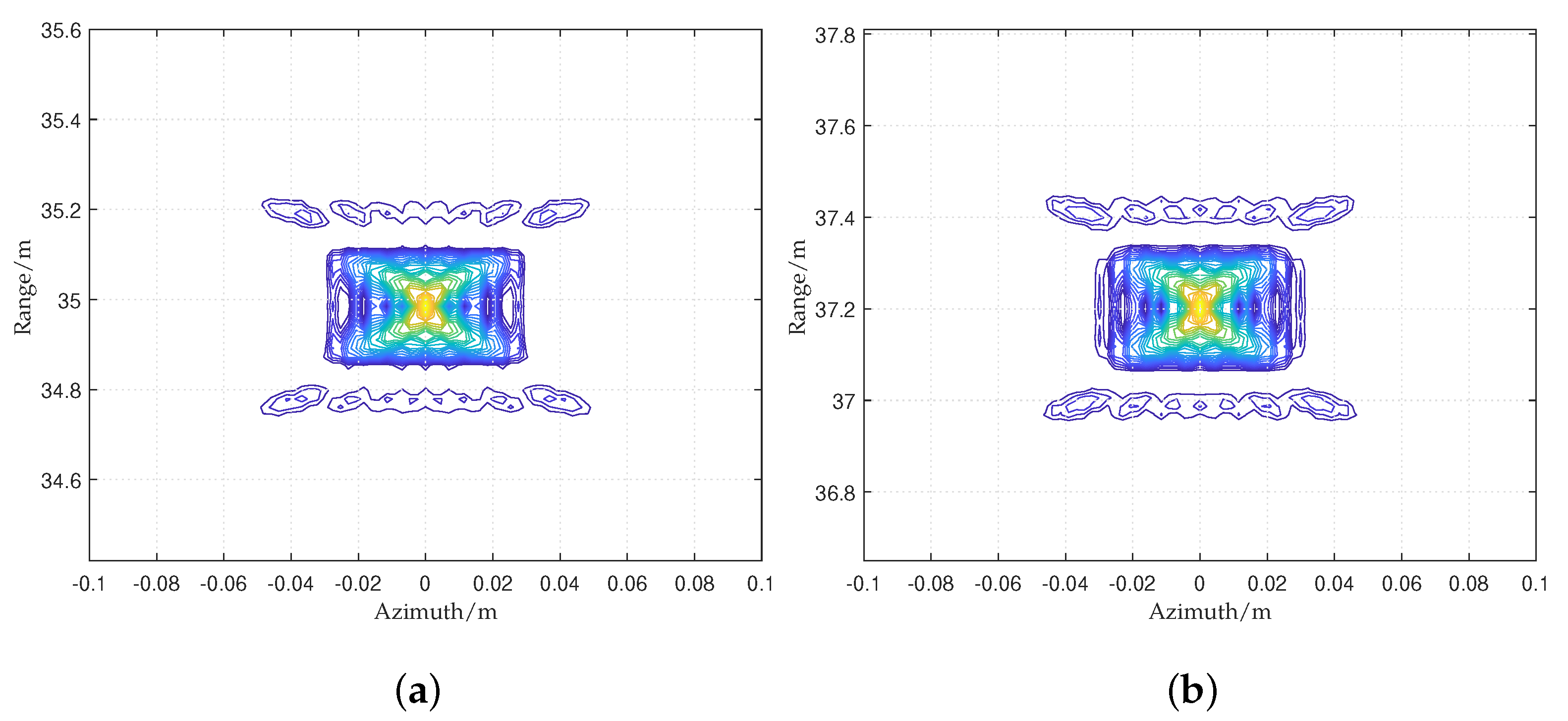
Figure 15b. The following figure shows the focusing results of the range central and non-central targets obtained using the traditional RMA (
Figure 16) and proposed RMA (
Figure 17).
Due to the range time folding, the support region still maintains an orthogonal spectrum after Stolt; therefore, the focusing result will reflect orthogonal side lobes. Nonetheless, the Stolt is ineffective due to the range time folding. This phenomenon will result in the range migration curve of non-central targets being unable to be fully corrected, thus leading to defocusing. The proposed RMA can eliminate the range time folding and obtain the non-orthogonal spectrum after Stolt, which means a focused result with non-orthogonal side lobes.
Because the imaging model of the RMA is more accurate, the focusing results reflect better side lobe symmetry than the RDA and FSA.
Table 6 shows the relevant indicators of the five targets, where the TRMA denotes the proposed RMA.
From
Table 6, it can be seen that the traditional RMA can obtain an orthogonal result with two-dimensional indicators close to the theoretical values for central target imaging. However, the non-central targets are defocused due to range time folding. The proposed RMA can solve the range time folding and make the non-central targets focused.
All the above simulations have preliminarily confirmed the effectiveness of the proposed algorithm for SRR SAR imaging, also revealing that the SRR SAR has extremely high two-dimensional resolution and significant research value. This article analyzes three frequency domain algorithms, and
Table 7 compares the various indicators of the results obtained using the three algorithms.
From
Table 7, it can be seen that the proposed FSA efficiency of the three algorithms is the highest, while the RMA is the most accurate but its efficiency is the lowest. The RDA is also limited in efficiency due to the use of Sinc interpolation processing.
4.4. Real Data Processing
In order to test the effectiveness of the proposed algorithm in practical applications, the FMCW MMW radar is fixed to the slide rail equipment for actual data collection. The RF front end of the MMW radar adopts the consumer AWR1642 development board on the market. There are three corner reflectors set in the scene, and the horizontal range of each corner reflector is 1 m; the rear two corner reflectors are 9 m away from the radar, and the front corner reflector is 8 m away from the radar.
Figure 18 shows the actual data collection scenario including the radar, slide rail device, and corner reflectors. The radar is powered by the mobile power supply, and the SAR echo data is stored on the onboard SD card through the signal acquisition board for offline processing.
Table 8 shows the radar parameters used in the experiment. It is obvious that the uniform linear motion of the radar cannot be guaranteed in the actual experiment; thus, there may be azimuth defocusing in the imaging result. According to the analysis in
Section 2.2.1,
is about
, which means the range migration caused by IPM is negligible.
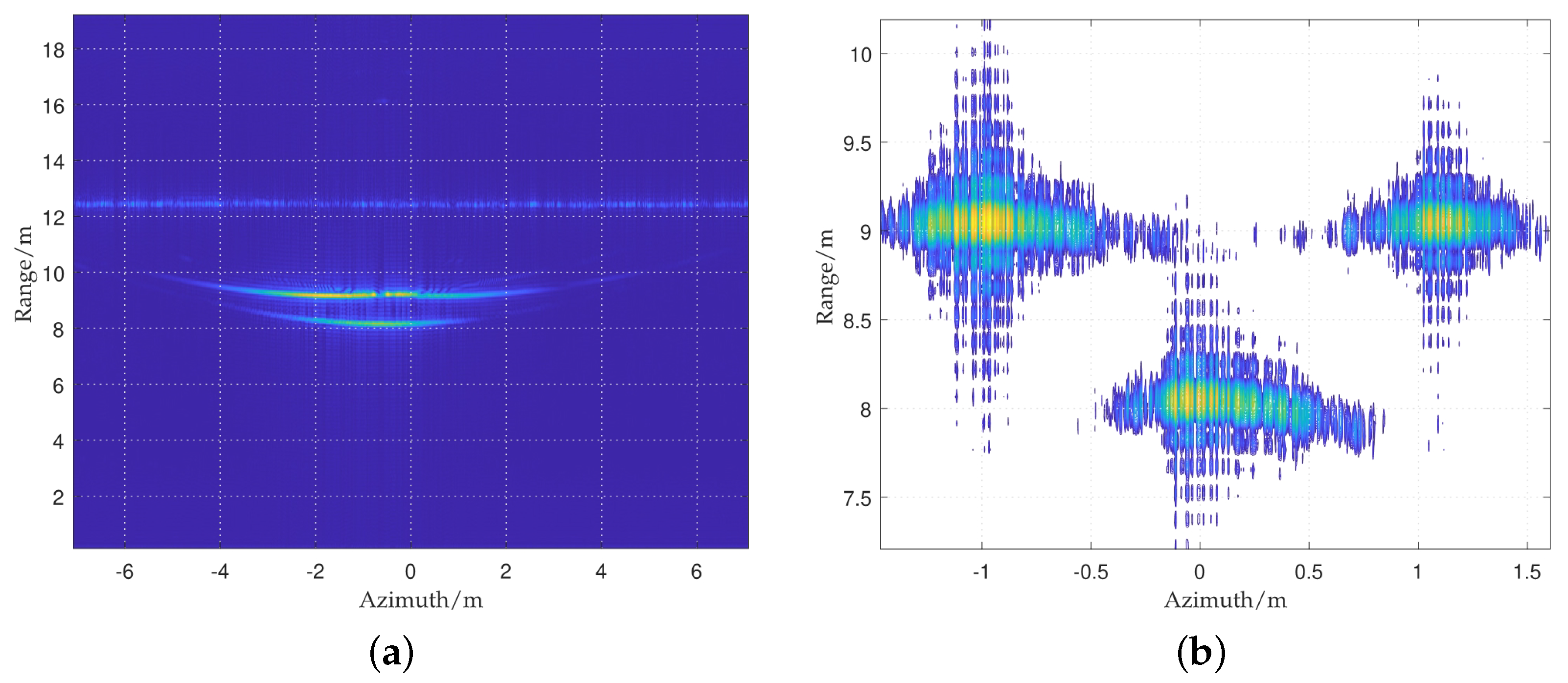
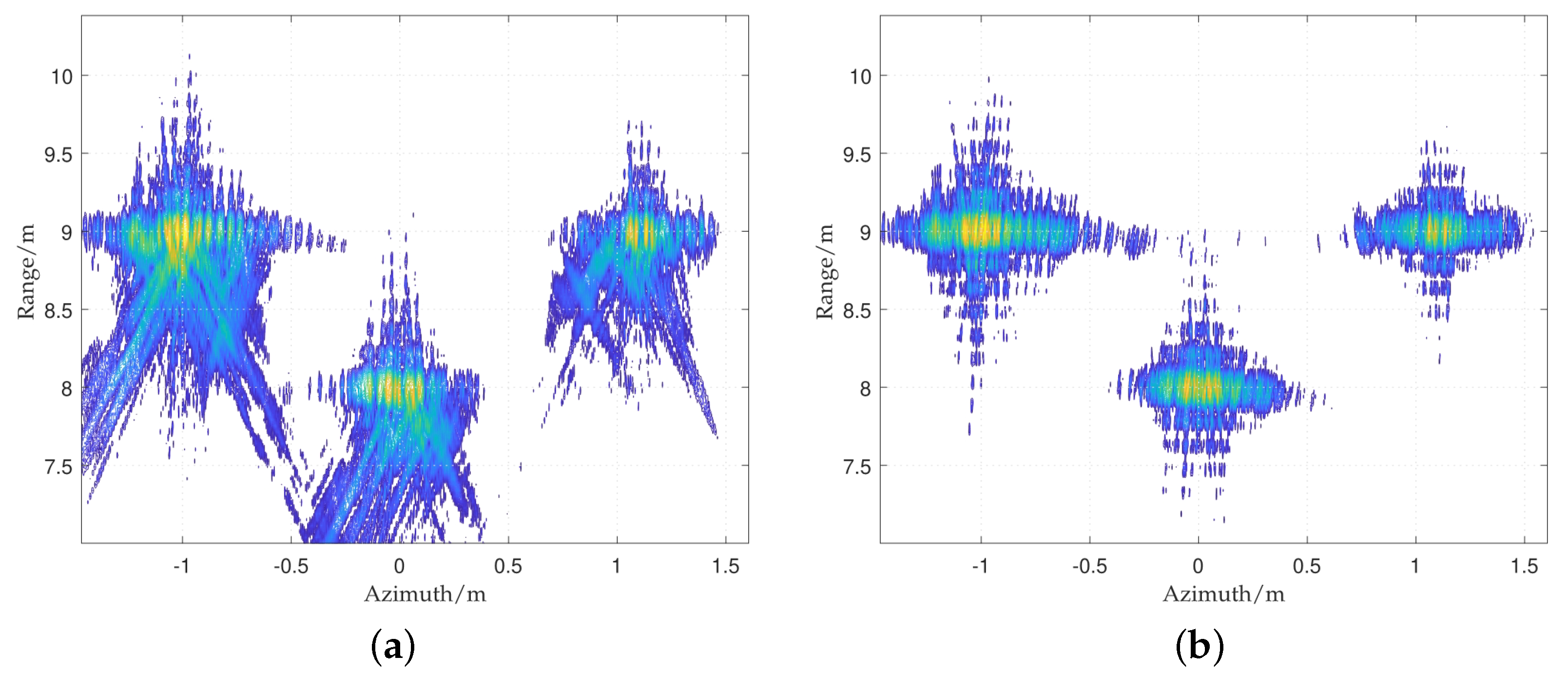
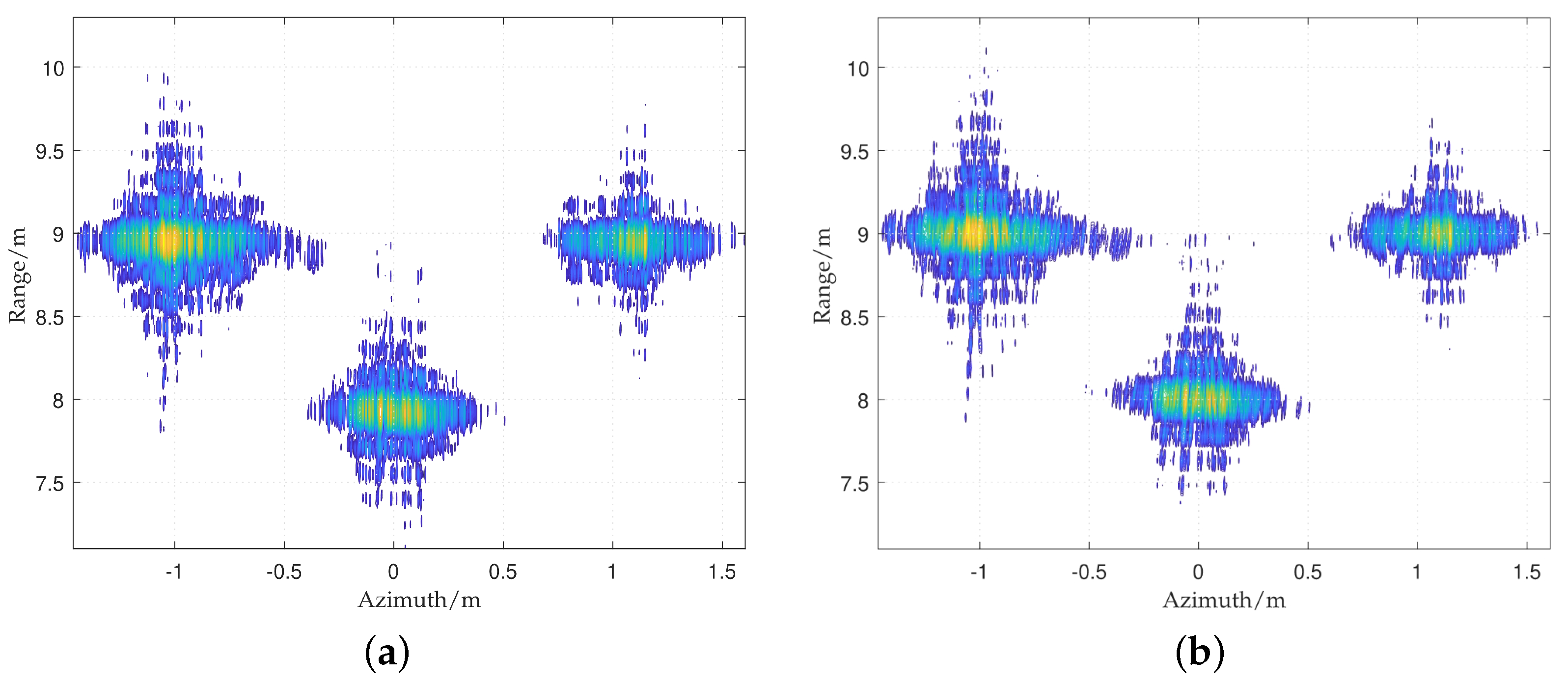
For the SAR data of the slide rail, the focusing results using the three algorithms are shown in
Figure 19,
Figure 20 and
Figure 21. It can be seen that the three algorithms analyzed in
Section 3 for SRR SAR can achieve accurate focusing on the three corner reflectors. It can also be seen that the imaging results of the proposed RMA and FSA are similar, and both are slightly better than the RDA, which may be caused by the fact that the RDA ignores the higher-order coupling term, and the Sinc interpolation may introduce some interpolation error. According to
Figure 20, it can be seen that the traditional FSA cannot obtain well focused results due to frequency aliasing. The range resolution of the imaging results is
m in each algorithm, while there is a certain level of defocusing in the azimuth direction due to the existence of a velocity error.
Figure 20 shows that the results focused using the RMA and TRMA are similar. The reason maybe because of defocusing in the azimuth direction. Nonetheless, it can be clearly seen that the results in
Figure 20a are orthogonal side lobes, while there is a non-orthogonal phenomenon in
Figure 20b. For the proposed RMA, we will conduct Mini-UAV SRR SAR flight tests for further verification in the future.
6. Conclusions
In this paper, the IPM and TDC in SRR SAR imaging were analyzed and the criterion for ignoring them was provided. Based on this, three frequency domain algorithms for SRR SAR imaging were analyzed. Considering the wide-beam condition in SRR SAR, a modified FSA was proposed to eliminate the frequency aliasing caused by the traditional FSA; furthermore, a modified RMA was proposed to eliminate the range time folding caused by the traditional RMA. Compared with traditional imaging algorithms, simulation and measured data verified the effectiveness of the proposed algorithms.
All the analyses in this paper are based on the ideal uniform linear motion of a radar. In practical applications, the focusing failure of the algorithm will be caused by speed and positional errors of the radar platform in the SRR Mini-UAV SAR application. In this case, the proposed algorithms should be combined with corresponding motion compensation/autofocus algorithms; otherwise, the image focusing quality will be significantly degraded, including loss of geometric resolution and a reduction in contrast. Motion error will be reflected in the echo as an envelope error and a phase error, and phase errors have a significant impact on imaging due to the strong phase dependence of SAR imaging. Moreover, the
relationship between electromagnetic wave translocation and phase can also reflect that when the wavelength is at the millimeter level, slight motion errors can lead to more serious phase errors. Therefore, for W-band SRR systems, motion compensation/autofocus algorithms are extremely crucial in practical applications. Therefore, the combination of the proposed algorithm and the motion compensation/autofocus algorithm will be the focus of our next work [
21,
22]. In terms of motion compensation/autofocus algorithms, we can use external devices such as GPS and IMU to obtain the real-time position of the radar and construct motion error compensation functions to achieve precise focusing. At the same time, we can also construct compensation functions by directly estimating error parameters in the echo.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}