1. Introduction
The correction microwave radiometer (CMR) is a fixed-beam pointing microwave radiometer, which is a payload on each satellite of the HY-2 (HaiYang-2) constellation. Its main function is to provide error correction for the wet path delay (WPD) from the radar altimeter to the satellite. WPD is a distance error caused by the influence of atmospheric water vapor (AWV) and other relative substances in the troposphere during the transmission of electromagnetic waves in the atmosphere; it ranges from zero (dry and cold air) to around 40 cm (wet and hot air) [
1,
2]. Because the distribution and change are unpredictable due to water vapor and other substances in the spatio-temporal range, the most accurate method is to load a microwave radiometer together with the radar altimeter, to measure and produce the WPD quantitatively [
3,
4].
Since WPD is one of the most critical terms in a satellite radar altimeter error budget, all modern altimetry satellites are equipped with special microwave radiometers for wet tropospheric correction. For example, on 10 August 1992, the United States and France jointly launched the TOPEX/Poseidon (TP) satellite for sea-surface topography; it carries a special microwave radiometer (TMR, 18 GHz, 21 GHz, 37 GHz) for WPD, with an accuracy of 1.2 cm [
5,
6]. As a follow-up satellite, the Jason-1 satellite was launched and changed the observed frequency of the microwave radiometer (JMR, 18.7 GHz, 23.8 GHz, 34 GHz) on board [
7]. Subsequently, the Jason-2 and Jason-3 satellites were successfully launched, carrying advanced microwave radiometers (AMR, 18.7 GHz, 23.8 GHz, 34 GHz) with the same mechanism [
8,
9]. On 21 November 2020, the United States and Europe jointly launched the Sentinel-6MF (Jason-CS) satellite with the advanced microwave radiometer for climate (AMR-C, 18.7 GHz, 23.8 GHz, 34 GHz); it carried a new measurement system (Poseidon-4) combining dual-frequency synthetic aperture radar (SAR) and traditional altimeter radar [
10]. The microwave radiometers of these satellites all have three frequencies for wet tropospheric correction.
The HY-2 satellite constellation consists of three satellites for the marine dynamic environment; they all carry CMRs to measure WPD and include the HY-2B, HY-2C, and HY-2D satellites. In this constellation, every CMR has three channels for ocean observation: the 23.8 GHz channel is for the AWV absorption line, the 37 GHz channel is for cloud liquid water (CLW), and the 18.7 GHz channel is for observing sea-surface wind contributions [
11].
Table 1 details their main specifications.
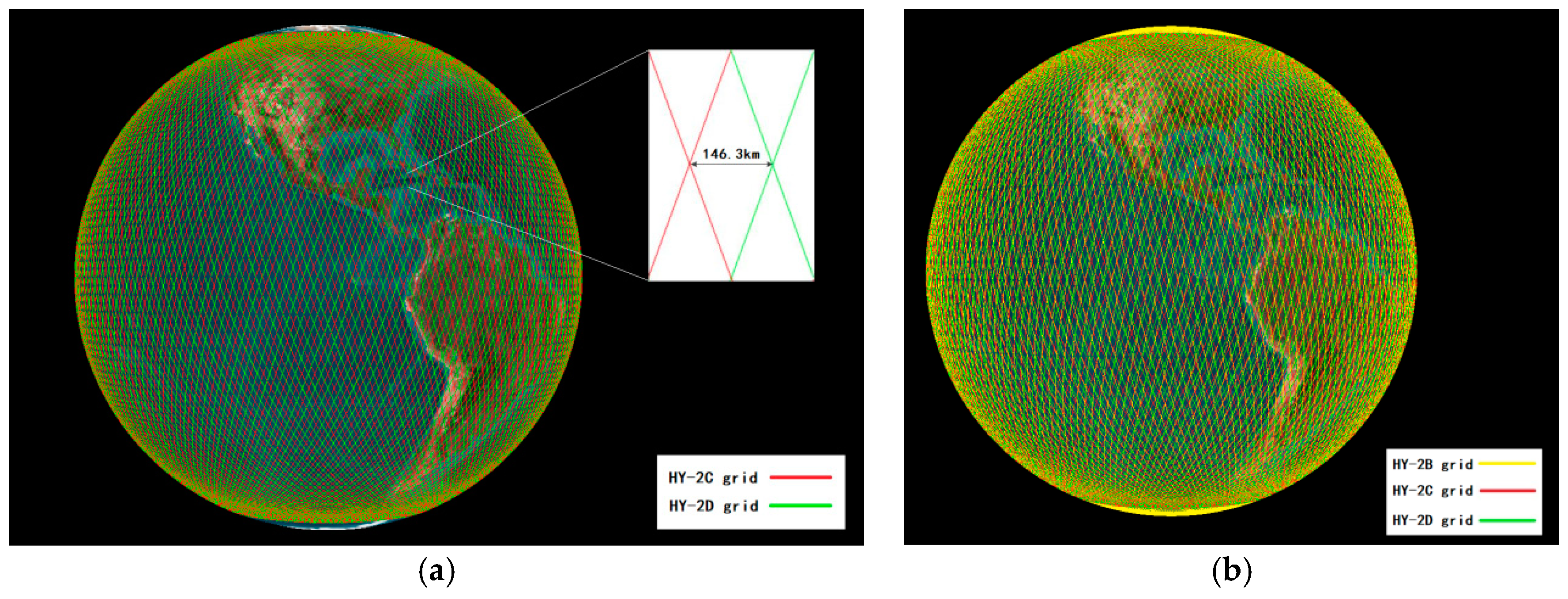
The HY-2B, HY-2C and HY-2D satellites were successfully launched on 25 October 2018, 21 September 2020 and 19 May 2021, respectively. HY-2B runs on a sun-synchronous orbit (inclination of 99.34°), and HY-2C and HY-2D are designed with non-sun-synchronous inclined orbits (inclination of 66°) [
12]. Although both HY-2C and HY-2D have the same orbit inclination, they are not on the same orbital plane and there is a fixed angle between the orbital planes of the two satellites, to maintain a fixed-phase difference between the ground tracks of the two satellites and produce a denser ground-track grid than a single satellite. Because HY-2C and HY-2D are different from HY-2B in terms of orbit character, it is impossible for HY-2C and HY-2D to produce a fixed-phase difference with HY-2B [
13]. However, the dual-satellite system that consists of HY-2C and HY-2D (with the same orbit character) can achieve fixed-cycle (about 10 days) observation coverage, so their ground tracks are evenly spaced on the Earth, with a spacing of about 146.3 km for the grid formed by the tracks [
14]. When HY-2B (fixed-cycle: about 14 days) is joined to this system, this grid can reduce the average spacing to about 100 km, and the density is increased significantly. These grids are shown in
Figure 1.
The radiometer must be calibrated before launch via on-ground calibration. The calibration equation of the receiver shows the relationship between the output voltage and antenna temperature, which extends from the mechanism to the receiver [
15]. The calibration result of every CMR achieves satisfactory accuracy on the ground for the HY-2 satellite constellation; however, post-launch, the brightness temperature (BT) deviation still exists between them, for multiple reasons:
As time increases in satellite operation, the decline of CMR performance will cause the observed BT to drift [
16].
For the CMR antenna and feed, the ambient temperature will change after launch, meaning calculation from on-ground calibration formulas can deviate from real BT values [
17].
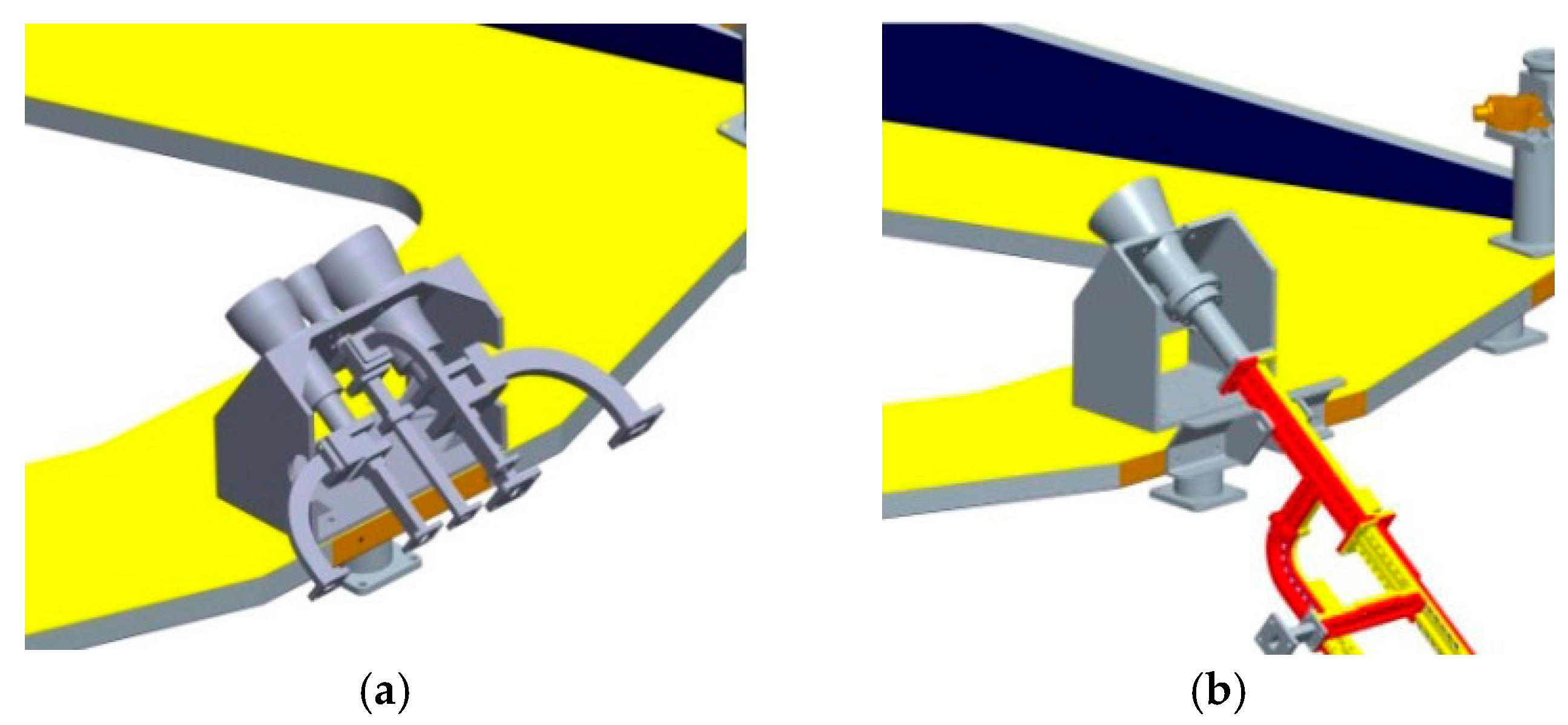
The CMR of HY-2B has three feed sources that correspond to three channels for observations; the CMRs of HY-2C and HY-2D satellites have only one feed source to three channels respectively. This is shown in
Figure 2.
Therefore, every CMR must be calibrated after launch; this is on-orbit calibration. It is customary to revise the calibration equation for stable satellites, which improves the accuracy of WPD. In 1992, Jason-1 was cross-calibrated by TOPEX in the “verification tandem phase” [
18]. In wetter conditions, the bias of WPD between JMR and TMR before calibration is 5–7 mm; after on-orbit calibration, the bias is approximately zero; in dry atmospheric conditions, this bias before calibration is 15 mm, and it drops to 5 mm after calibration. In 1997, ERS-2 was cross-calibrated by TOPEX and ERS-1, which improved the WPD [
19]. The objective of the present study is to normalize the BT values obtained from the on-ground calibration equations for the CMRs of the three satellites, and to minimize the bias among BT values of different CMRs, so as to further improve the accuracy and consistency of the WPD for the HY-2 satellite constellation.
2. Datasets
On-orbit calibration must be supported with sufficient data; one portion of these are used to build models for calibration and inversion, and the other is used to verify them. The observed times for the three sets of data must be different, to prevent data for calibrating or modeling being used to verify them [
20,
21]. Therefore, all experimental datasets used for this on-orbit calibration should be divided into three parts: verification, retrieval algorithm, and calibration equation. The datasets are given in
Table 2.
The first group is used to cross-check on-orbit calibration. In order to normalize the BT of the three CMRs in the HY-2 satellite constellation, it is necessary to select one of them as the reference. The reference satellite should have more crossovers than the other two satellites in the constellation, to provide as many samples as possible for on-orbit calibration [
22,
23]. The task that checks the effect of on-orbit calibration includes two steps: one observes the change of differences for CMR products in the crossovers of two satellites before and after calibration [
24], and the other checks the accuracy of products after calibration. In this experiment, the CMR products of the HY-2 satellite constellation for two discontinuous months are selected to cross-match and compare, and after on-orbit calibration, the AMR products of Jason-3 are compared with CMR products to verify.
The second group is used to build a new retrieval algorithm. The current operational algorithm for the CMRs of the HY-2 satellite constellation is from the HY-2A satellite; it was fitted using WPD (AWV) data from the AMR and TB data of CMR, as obtained from the HY-2A satellite [
25]. The WPD and AWV of the HY-2 satellite constellation were validated by comparing them with the synchronous data from in-situ observations of the ocean or the AMR of Jason-3, which all show minor deviations [
26]. In this on-orbit calibration, new models and coefficients are tried experimentally.
The third group is used to establish an on-orbit calibration equation. After selecting the reference satellite, the BT data of the other two satellite CMRs are calibrated to the BT data’s dimension of the reference satellite CMR. In order to ensure the accuracy of BT data, this calibration must be performed when every satellite of the constellation is running stably [
27]. The HY-2D was sufficiently stable after April 2022. This experiment accumulated datasets for about 1 year until 2023, which was enough to determine whether the on-orbit calibration method had an optimal effect.
3. Cross-Checking in the HY-2 Satellite Constellation
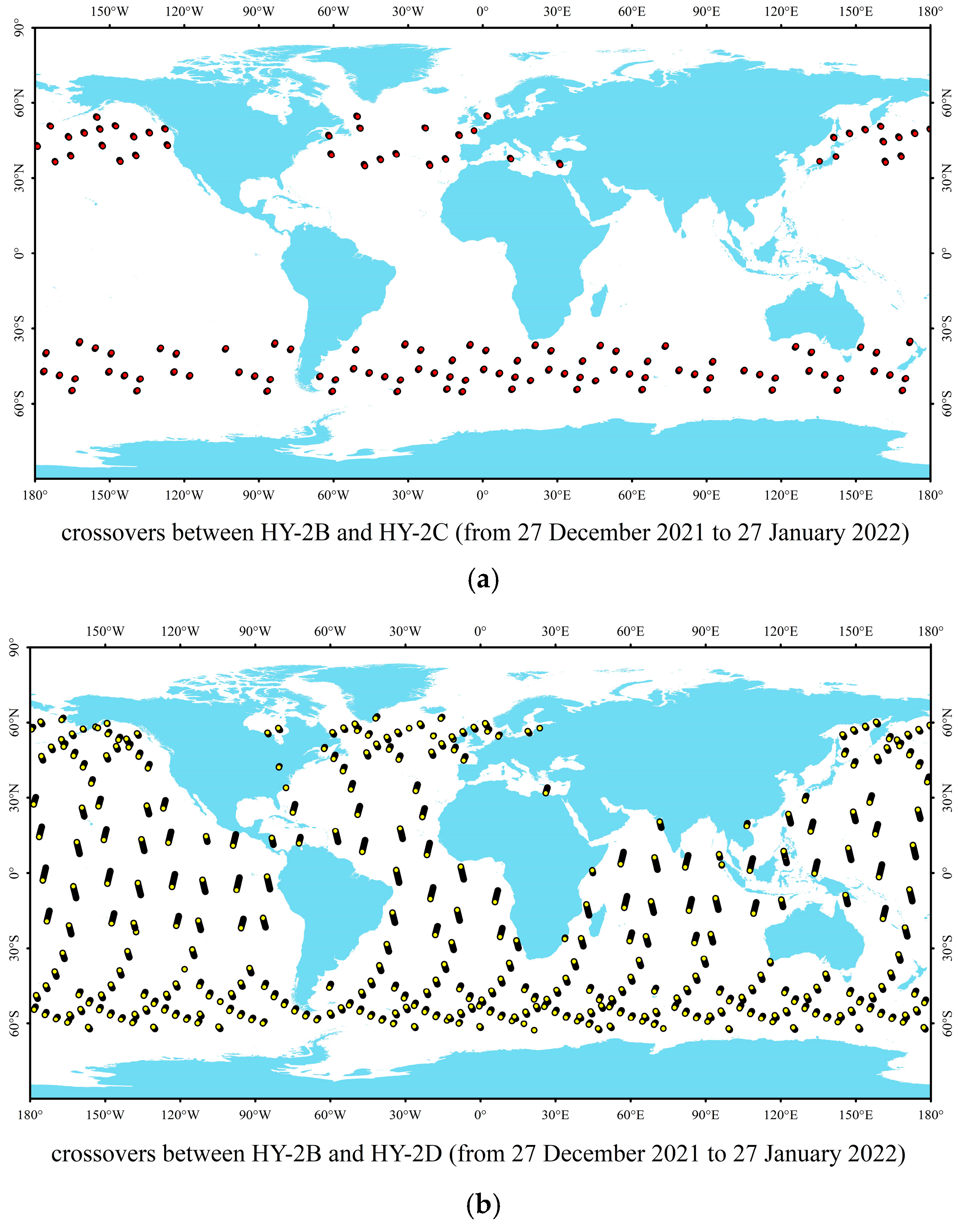
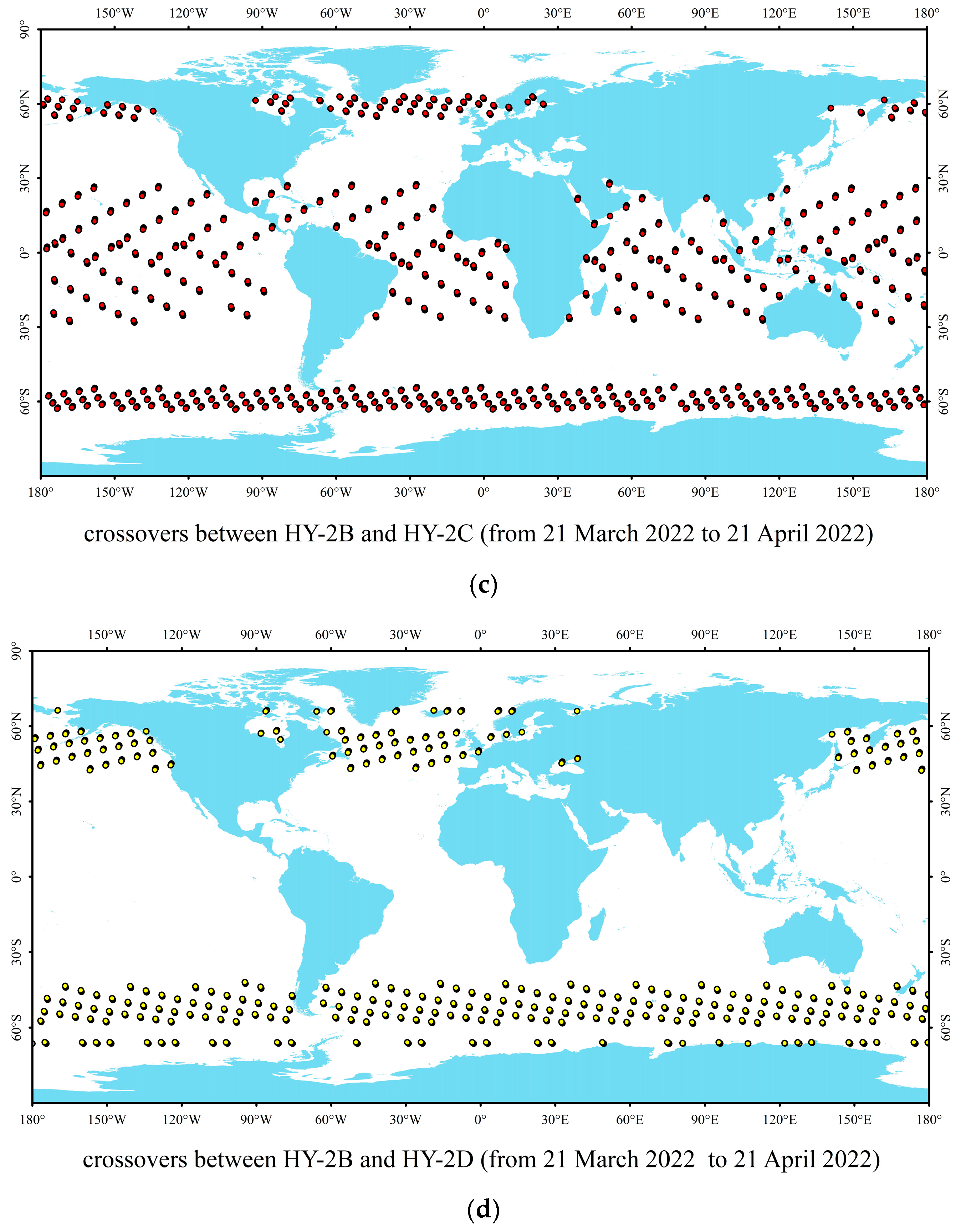
The constraints for selecting crossovers for on-orbit calibration are as follows: they are all more than 50 km from the coastline, the temporal range is less than 30 min, and the spatial range is a radius of 15 km across a circular area. The data for one month (see
Table 2 from 27 December 2021 to 27 January 2022) are extracted from the datasets used for on-orbit calibration, and any two of three satellites in the HY-2 satellite constellation are cross-matched according to the above constraints. Among them, there are 1254 crossovers between HY-2B and HY-2C; 10,898 points are between HY-2B and HY-2D and have no points between HY-2C and HY-2D. We take data for another month (see
Table 2 from 21 March to 21 April 2022) to cross with each other under the same constraints in the HY-2 satellite constellation; HY-2B crosses HY-2C and HY-2D, respectively, for 4424 and 3050 points, though we still have no crossovers between HY-2C and HY-2D.
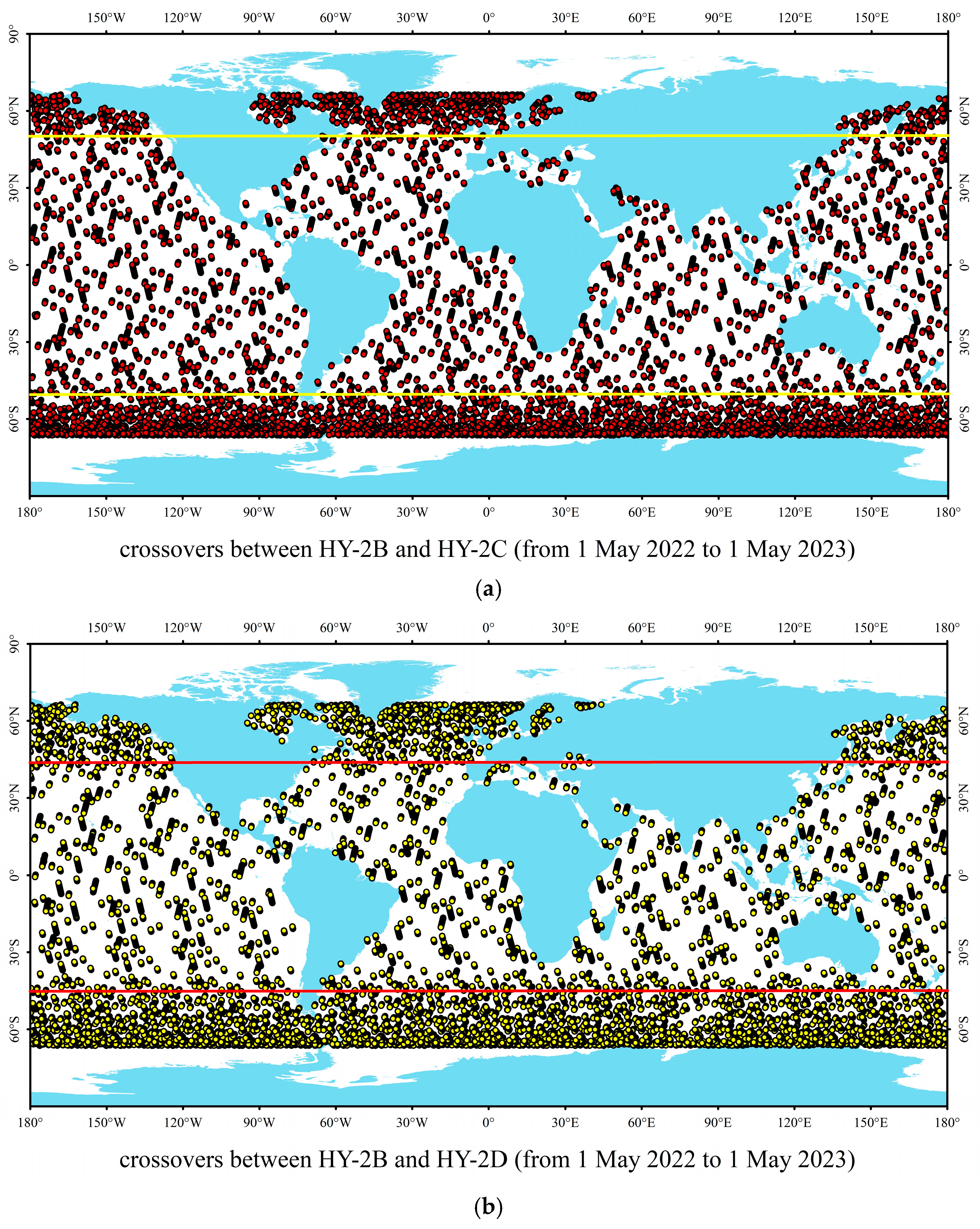
The distribution of crossovers is shown in
Figure 3a–d. It can be shown in two durations: HY-2B has the most crossing points with HY-2D, with the second-most being between HY-2B and HY-2C. However, the distribution and number of crossovers varies in different months between HY-2B and HY-2C (shown in
Figure 3a,c) as well as HY-2B and HY-2D (shown in
Figure 3b,d). Therefore, long-term data accumulation can ensure sufficient points for on-orbit calibration, but there are no points between HY-2C and HY-2D. These are mainly determined from the orbit characteristics of the three satellites in the constellation (see paragraph 4 in
Section 1). Therefore, the HY-2B satellite can be used as the reference satellite for this on-orbit calibration.
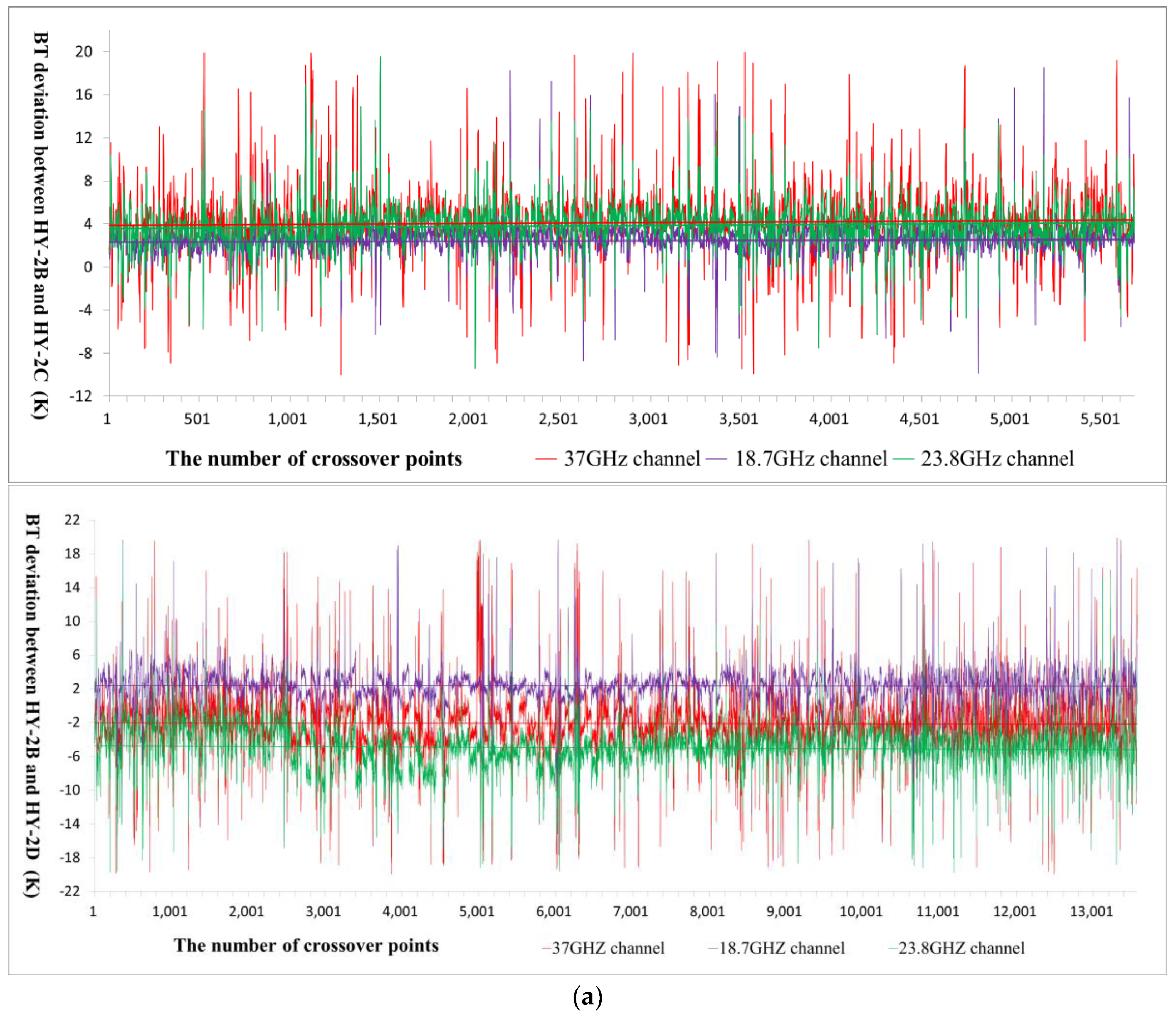
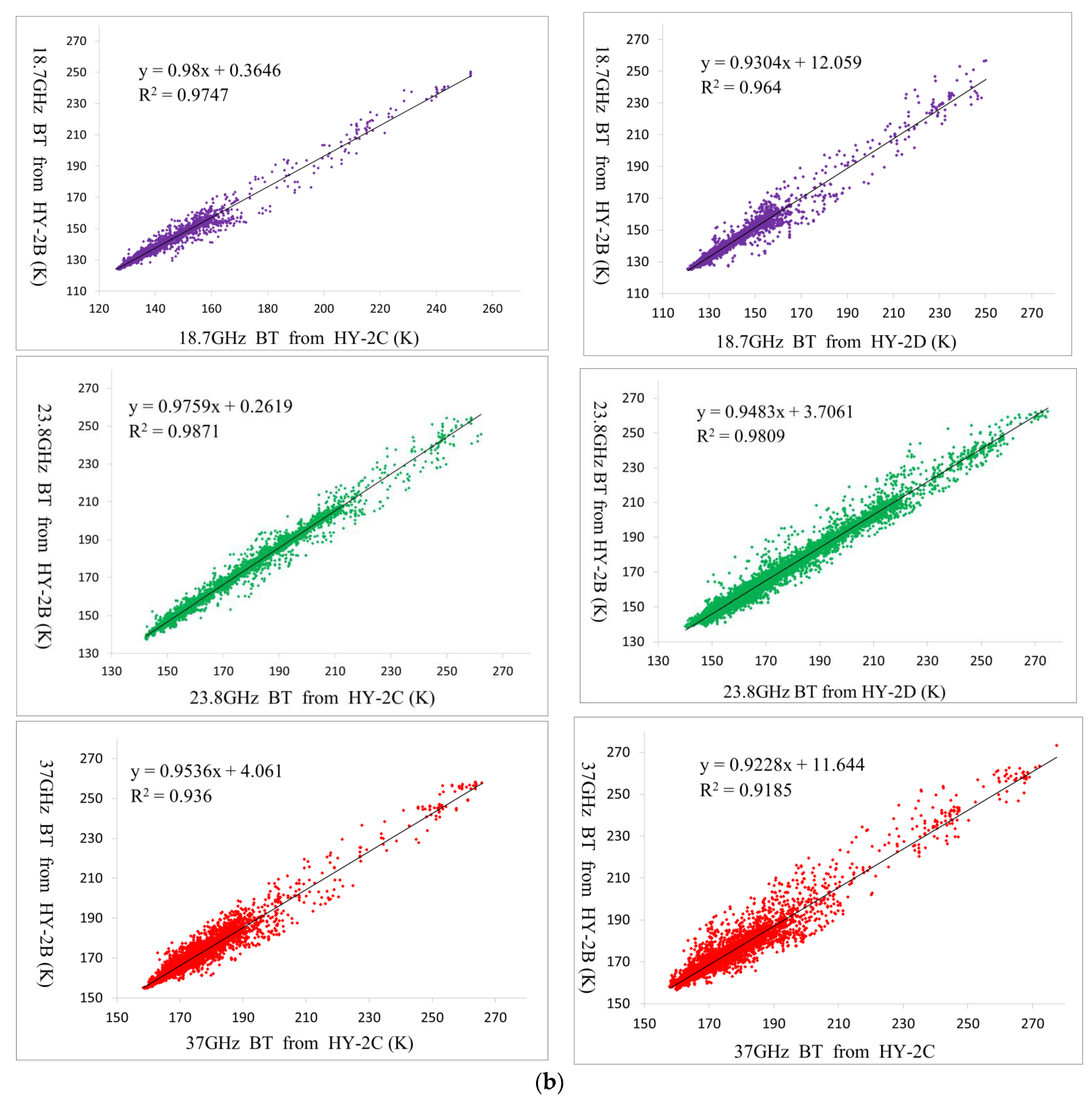
We compare the BT data of the above crossovers between the satellites and take three channels from this constellation; as shown in
Figure 4a, their deviations are quite obvious. It may be seen that their BT differences are all concentrated on a fixed threshold and the trend line of their BT differences is very straight, indicating that the relative stability of BT is excellent between them [
28] from 2021 to 2022. Therefore, it may be deduced that if crossovers conform to the above constraints between HY-2C and HY-2D, these stable differences must also occur for them. For two satellites with crossovers, we removed the BT data contaminated by sea ice and rainfall from all points; the invalid data for HY-2B and HY-2C accounted for 1.92% of the total, and the invalid data for HY-2B and HY-2D accounted for 1.86%. In
Figure 4b, the BT data of crossovers for the same frequency channels from two satellites are linearly correlated, indicating that the CMRs of the three satellites have consistency and inheritance, which is also a prerequisite for on-orbit calibration in the HY-2 satellite constellation.
Although products of all CMRs in the HY-2 satellite constellation meet specifications, the BT differences between different CMRs still leads to differences in AWV or WPD in close spatio-temporal ranges. In statistics, normalization can unify singular sample data to the same dimension, which may improve the accuracy of the retrieval model’s output results [
29]. Therefore, the next study will normalize the BT data dimension for the CMRs of the HY-2 satellite constellation, to reduce the difference of the observed BT for different CMRs.
4. Calibration in the HY-2 Satellite Constellation
In the restricted spatio-temporal range, there are crossovers between the HY-2B satellite and the other two satellites in the HY-2 satellite constellation. In theory, the BT deviation is small from different satellites at the intersection of channels of the same frequency, but this is not certain from the above when cross-checking for BT (see
Figure 4). On-orbit calibration aims to revise BT data in the HY-2 satellite constellation, minimizing the root mean square error (RMS) to BT data from three different CMRs.
In order to obtain enough effective data for on-orbit calibration, this experiment selected the third group data (see
Table 2) during 12 months in the HY-2 satellite constellation. A total of 53,664 crossovers between HY-2B and HY-2C and 51,386 crossovers between HY-2B and HY-2D were necessary to calibrate HY-2C and HY-2D to HY-2B, respectively. The distribution of crossovers is shown in
Figure 5. It can be seen that, within one year, the distribution map of crossovers between the HY-2B satellite and other two satellites is very similar, with high-density points in high-latitude regions and points distributed uniformly in global mid-low-latitude regions. In terms of distribution or quantity, crossovers can guarantee accuracy for on-orbit calibration equations.
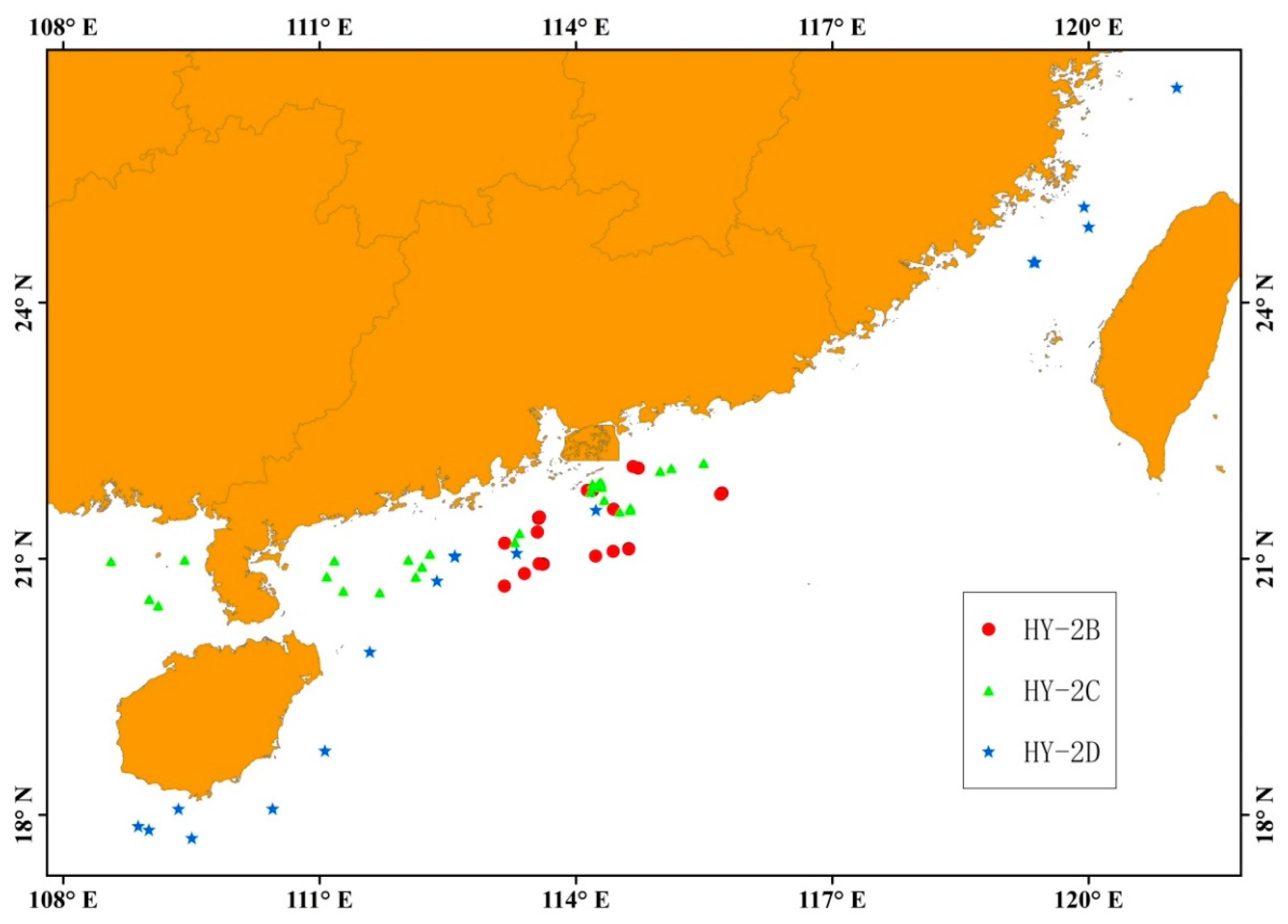
In-situ observation is the most accurate method for obtaining atmospheric water vapor data at present [
30]. During the on-orbit test, every satellite of the constellation cooperates with the observation ship to produce in-situ data. When the satellite flies over the ship, it releases sounding balloons to obtain the integral amount of atmospheric water vapor, measured to validate observations from the CMR. The in-situ points used to observe are shown in
Figure 6. For atmospheric water vapor, the RMS is small between CMR and scene: it is 2.55 mm for HY-2C and 2.45 mm for HY-2D, and the RMS of HY-2B is 2.23 mm, which is less than those of HY-2C or HY-2D. Lower errors may occur because the CMR of HY-2B has three feed sources for three channels, and exclusive waveguides can be more beneficial for measuring radiation. The HY-2B satellite altimeter observes the sea level reasonably well and within its specifications, which shows BT from the HY-2B satellite CMR is also credible [
31].
The HY-2B satellite is selected as a reference satellite for on-orbit calibration in the HY-2 satellite constellation, and its BT datasets are regarded as a benchmark; on-orbit calibration equations are established by ordinary least squares and one year’s worth of datasets [
32]. The BT datasets of the HY-2C and HY-2D satellites are calibrated to the HY-2B satellite to minimize BT differences between the same channels of any two satellites. The on-orbit calibration equation for HY-2C and HY-2D can be obtained using the 23.8 GHz channel, as follows:
The variables are as follows:
and
are, respectively, the BT of HY-2C and HY-2D for the 23.8 GHz channel of the CMR;
and
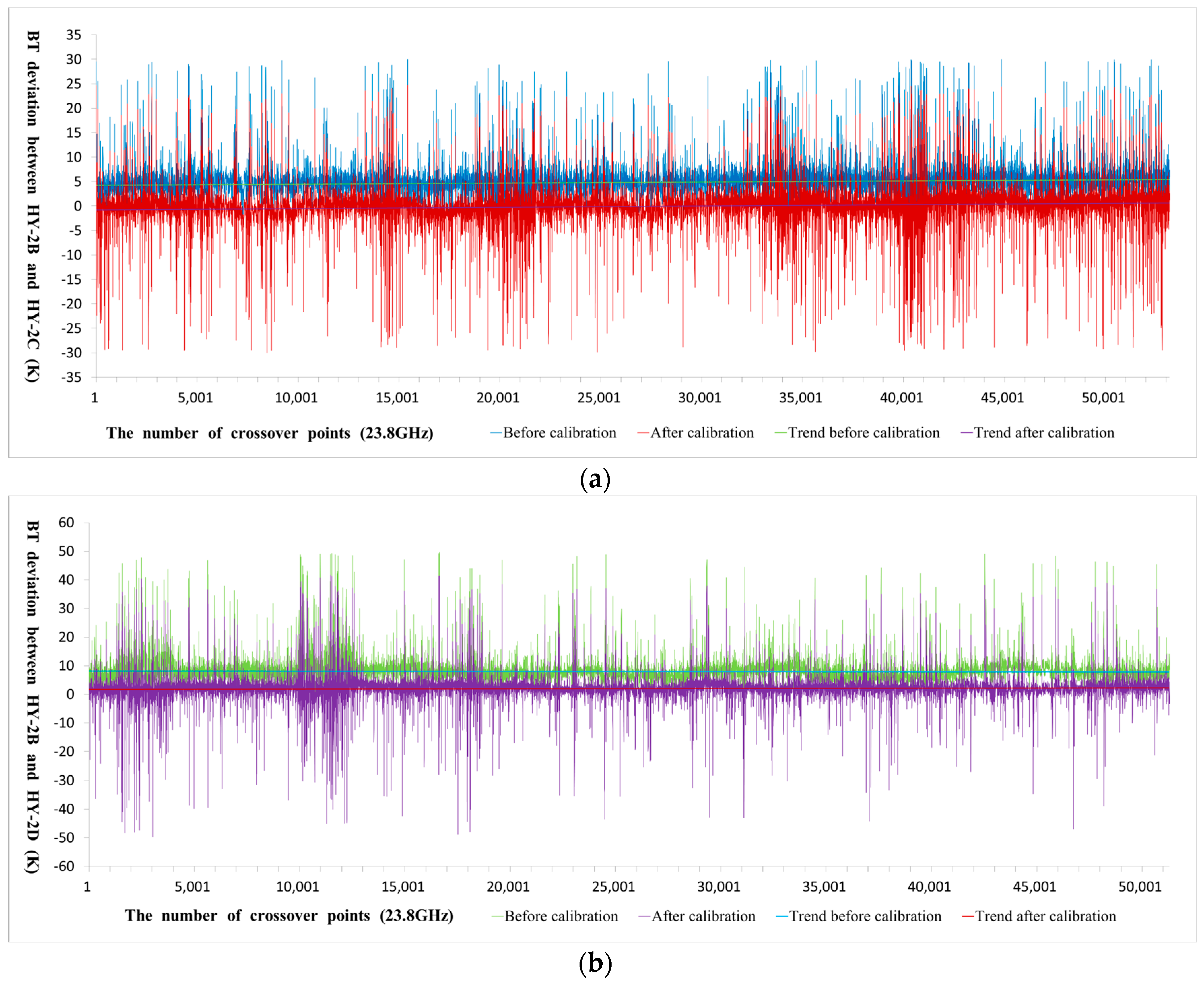
are the corrected BT. For the 23.8 GHz channel, BT differences between the HY-2C and HY-2D satellites and the HY-2B satellite before and after on-orbit calibration are shown in
Figure 7. It can be seen that after on-orbit calibration, the overall trend of BT differences between them and the HY-2B satellite in the 23.8 GHz channel is close to zero.
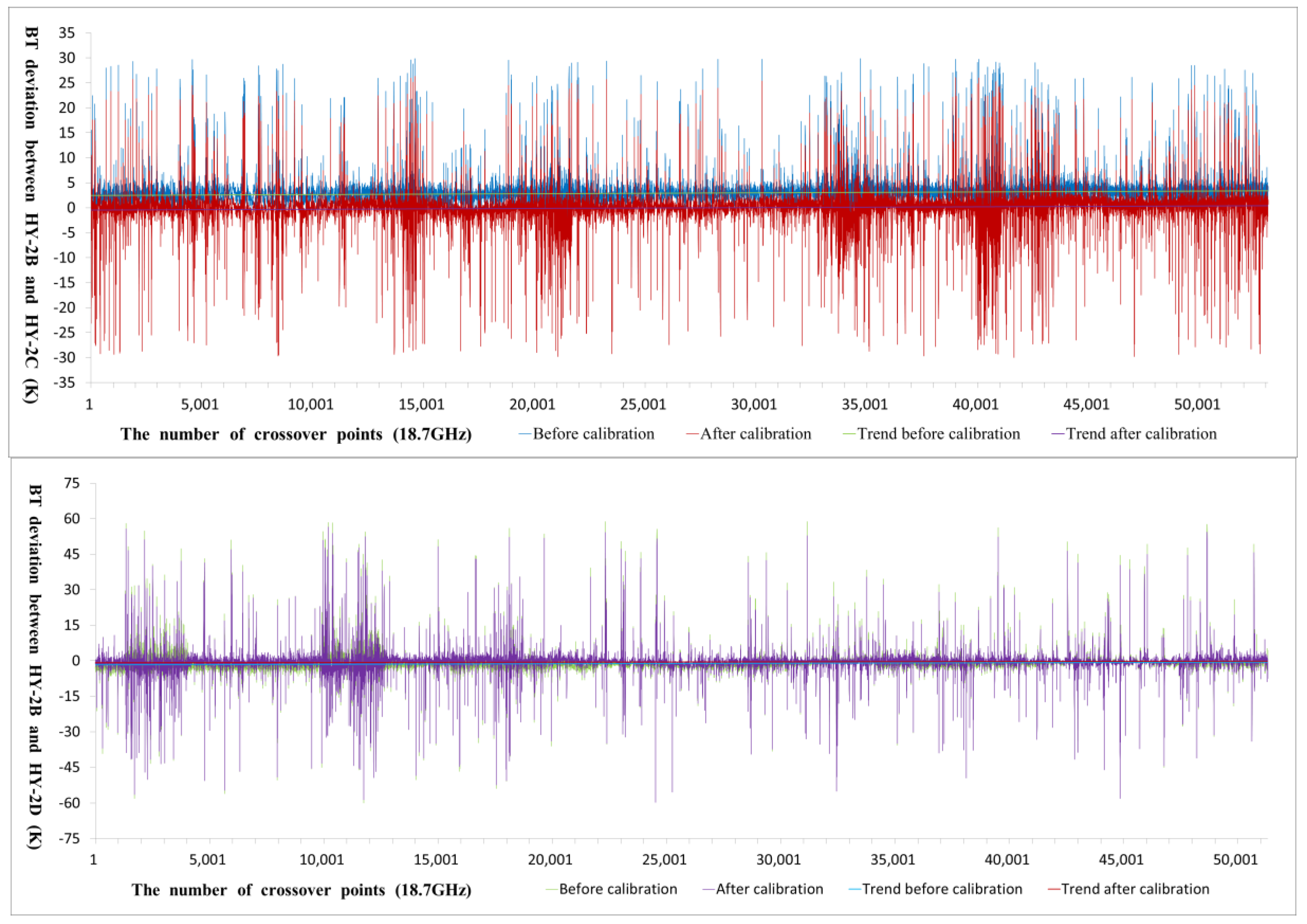
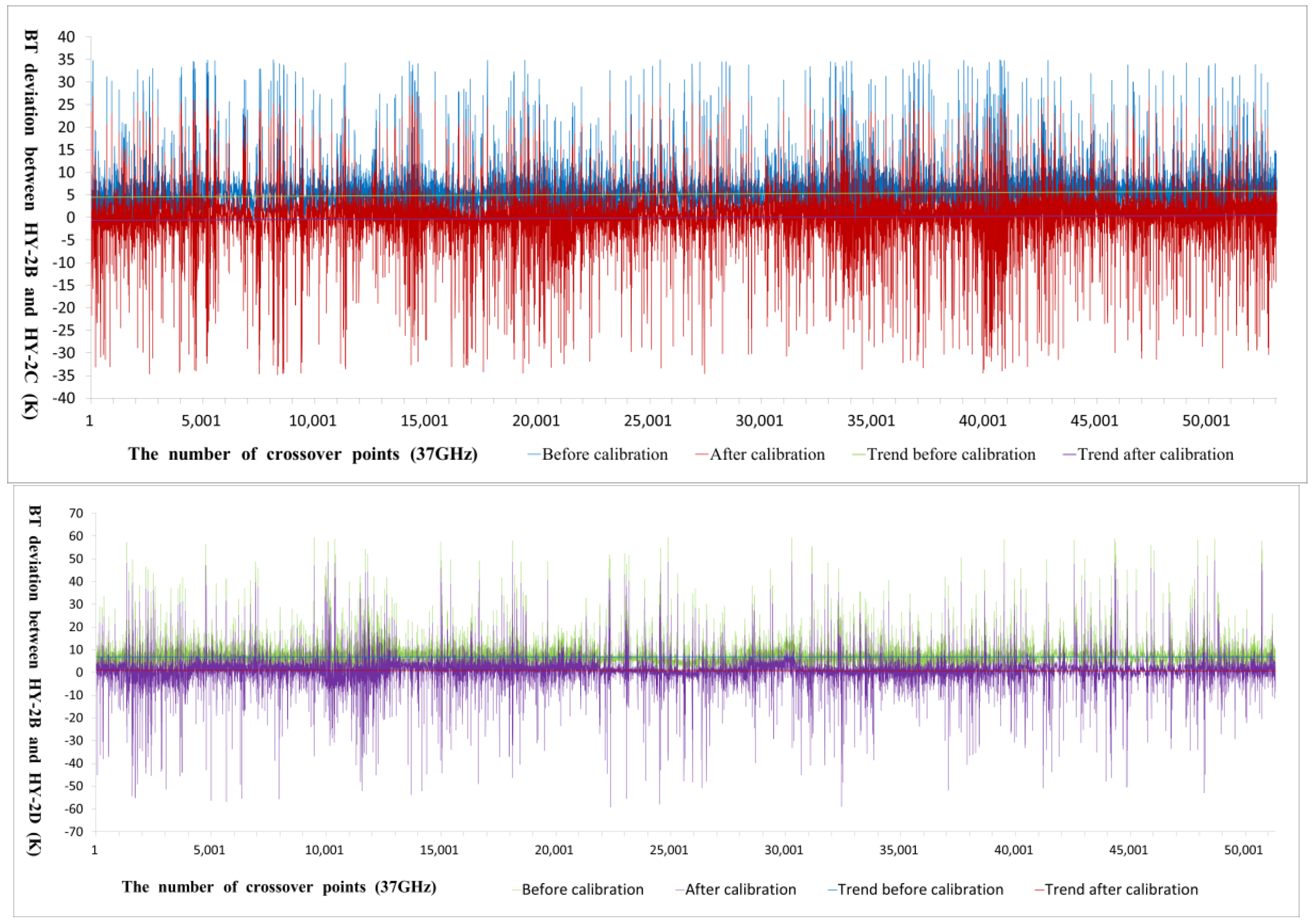
Similarly, BT values from 18.7 GHz and 37 GHz can be also corrected using this method. The plots in
Figure 8 and
Figure 9 illustrate the comparison between the HY-2B and HY-2C satellites as well as the HY-2D satellites, showing the differences in their BT before and after on-orbit calibration. Furthermore, the on-orbit calibration equations can be derived from these comparisons:
For the CMRs of the HY-2C and HY-2D satellites, the corrected three-channel BT data may be used to retrieve new AWV and WPD values, which differ from uncalibrated products and must be checked for accuracy.
5. Inversion and Verification
The better way to fit the retrieval model is to use BT data from the radiometer and synchronously observed atmospheric parameters, but at present there are no sufficient on-site observation datasets from the atmosphere. This experiment used ECMWF reanalysis atmosphere data to match the second group dataset (see
Table 2) from the HY-2B satellite and obtain coefficients. The new retrieval models are of the form [
33]:
Ordinary least squares can determine the coefficients;
,
and
represent BT, respectively, from the three channels of the CMR; the fitted coefficients are given in
Table 3. Both AWV and WPD are products of CMR, AWV is the most important contribution to WPD, and there is a specific mathematical relationship between them [
34]. Different retrieval algorithms are built for AWV and WPD in this study, in order to verify the reliability of the on-orbit calibration method for two groups of results.
After on-orbit calibration, BT values of the first dataset (see
Table 2) were reprocessed and compared. The operational algorithm for the HY-2 satellite constellation processes the BT dataset before and after calibration. Compared results are shown in
Table 4. Both mean bias and RMS decrease significantly between the HY-2C or HY-2D satellite and the HY-2B satellite after calibration. With the new retrieval algorithm for Equations (7) and (8), the BT datasets are processed and compared again; there are similar changes in the differences between satellite products. The operational algorithm and new algorithm are respectively used for the BT datasets of the HY-2B satellite; the difference between the two products is relatively small. According to the above compared results, it can be seen that similar algorithms from different data sources have little impact on products, while BT values are the key factor in determining the accuracy of products.
In the distribution of crossovers (see
Figure 5), it can be seen that the density of crossovers at high latitudes is significantly greater than that at low latitudes. In fact, HY-2B and HY-2D also have more crossovers than between HY-2B and HY-2C at high latitudes, and observations at high latitude contain more uncertainty. Therefore, RMS is always greater between HY-2D and HY-2B than between HY-2C and HY-2B. In this study, the AWV and WPD of crossovers are divided into two parts by high and low latitude, which are bounded by the 45° north–south latitude. The products are reprocessed by the new retrieval algorithm presented in Equations (7) and (8). In
Table 5, it can be seen that after on-orbit calibration, mean bias and RMS for products of the HY-2 satellite constellation at low latitudes is smaller than that at high-latitudes, but the reduction of RMS for high-latitude products is greater than that for low-latitude products after calibration. This shows that on-orbit calibration is more effective for improving the relative accuracy of high-latitude products and the absolute accuracy of low-latitude products.
The deviation between products from different CMRs has a significantly decreased after-orbit calibration in the HY-2 satellite constellation, but the absolute accuracy of products must be also validated. Since too few in-situ measurement points can be matched with the HY-2 satellite constellation, AMR products of the Jason-3 satellite are used as a reference for validation. The AMR in Jason-3 is a radiometer with a similar mechanism as CMR, and its BT data have a good accuracy after long-term and systematic on-orbit calibration [
35]. After on-orbit calibration to the HY-2 satellite constellation, the CMR products of HY-2C and HY-2D (the first group in
Table 2), obtained by the operational algorithm, are compared with AMR products to check AWV and WPD. For HY-2B, the CMR products of the operational algorithm and new algorithm are compared with AMR products. The checking result is shown in
Table 6. The RMS between CMR products and AMR products is decreased, but the variation is less than the reduction of RMS before and after calibration inside the HY-2 satellite constellation.
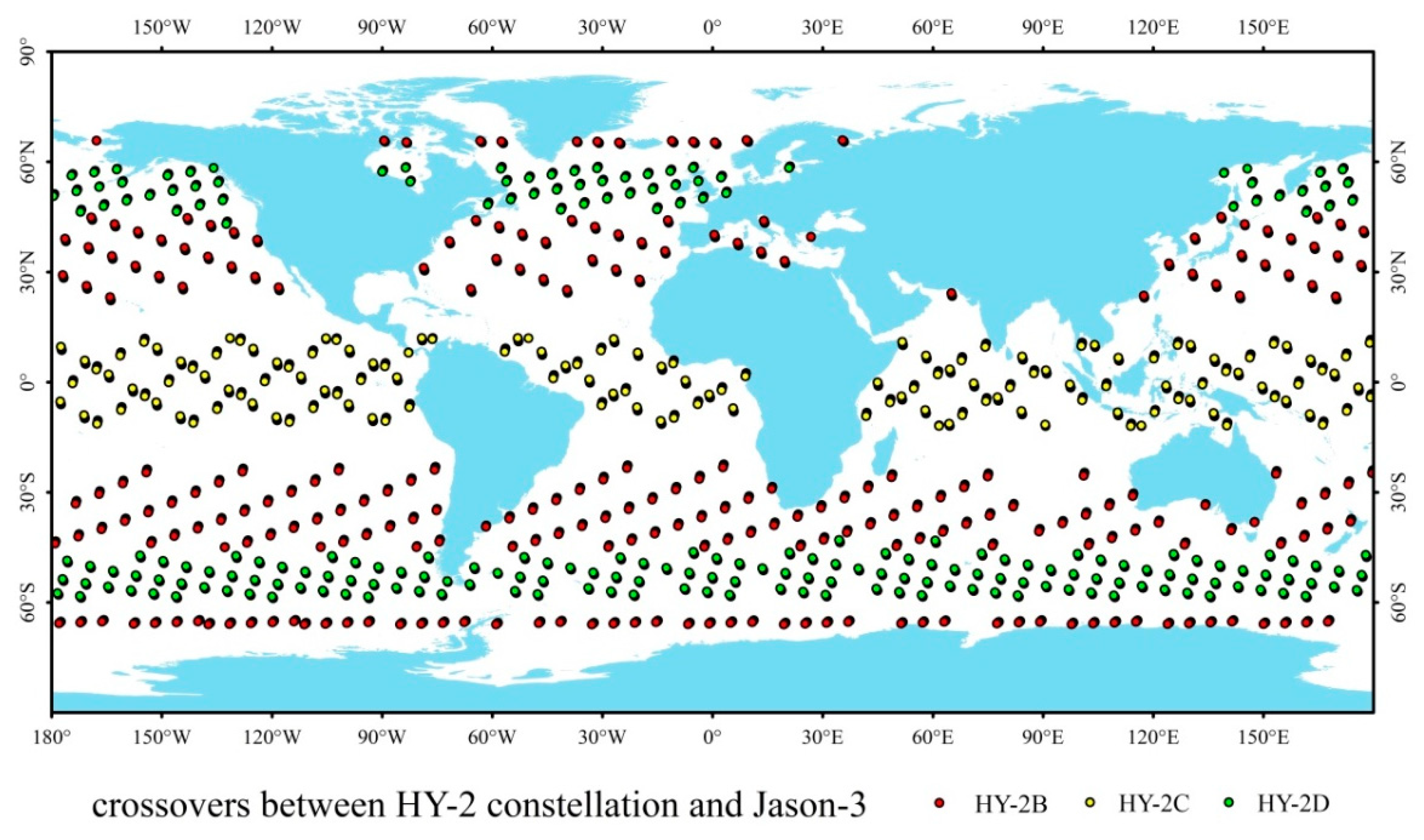
For the first dataset (see
Table 2) in cross-checking,
Figure 10 shows a very different distribution of crossovers, to match the three satellites to the Jason-3 satellite at the same time. HY-2C satellite has more points than the other two satellites, to match the Jason-3 satellite at low latitude; meanwhile, HY-2B and HY-2D satellites have more crossovers with the Jason-3 satellite at high latitudes. Since observation errors of the space-borne radiometer are greater at high latitudes than at low latitudes, the increase in the proportion of high-latitude crossovers will lead to larger errors for cross-checking [
36]. In
Table 4,
Table 5 and
Table 6, it can also be found that the results of cross-checking between the HY-2C satellite and other satellites are better than those of the HY-2D satellite, which is affected by the uneven distribution of crossovers from the test dataset; the HY-2C satellite has more crossovers at low latitudes than other satellites. However, the above cross-checking shows that those differences between different satellite products after on-orbit calibration are all less than before calibration.
6. Summary and Conclusions
This calibration selects the CMRs of the HY-2B satellite as a reference and calibrates the CMRs of the HY-2C and HY-2D satellites so that the BT data of all CMRs are normalized to the same level. It greatly reduces differences between the three satellite observation products in the HY-2 satellite constellation. By cross-checking to AMR products from the Jason-3 satellite, it can be shown that the accuracy of CMRs products from the HY-2 satellite constellation is almost the same as that of similar satellites, and this on-orbit calibration also decreases the differences in similar radiometer products between the HY-2 satellite constellation and Jason-3 satellite.
In this on-orbit calibration, it can be shown that normalization to the BT of CMRs can effectively improve the accuracy of products for the HY-2 satellite constellation. This also indicates, for a fixed retrieval algorithm, that there must be a unique set of BT values from the calibration equation that can make the AWV and CLW from CMR as close as possible to the true values in the atmosphere. For the ground segment, it is better method to use a weather radar to measure the atmospheric element and a satellite to synchronously observe atmospheric BT, and to construct the retrieval algorithm from these two datasets as the core algorithm; other methods for revision are based on this. For the satellite segment, it is an important task for satellite platforms to minimize the differences of working environments for CMR between the ground and space after determining the coefficients of the calibration equation from on-ground calibration, in order to ensure the stability of the observed BT.
Although good quality can be obtained for CMR products compared with AMR products, CMR products may still be further improved. Firstly, there is still room for improvement in the quality of BT data for the 18.7 GHz and 37 GHz channels. From the above comparison, it can be seen that the correlation between the BT data of the 23.8 GHz channels from different satellites is excellent, but the correlation between BT data of the other two channels is relatively low. This indicates that wind speed and cloud liquid water accuracy are not optimal, and the calibration equations of these two channels can still be optimized to improve WPD. Secondly, the retrieval algorithm can be improved based on the different geographical locations. The HY-2B satellite can observe polar areas, but the accuracy of CMR products in high-latitude regions is lower than that in low-latitude regions; for the three satellites, the accuracy of products in coastal waters is lower than that in distant sea waters; all of these can be solved by using different retrieval algorithms for different sea areas. Finally, standard BT data for on-orbit calibration can be further improved. WPD estimates are from the retrieval algorithm, which is built from atmosphere data and BT data obtained from the forward model. Therefore, acquiring more accurate BT data is the most critical step to improving the accuracy of WPD; the superior method is on-orbit calibration using BT obtained from field observation data and the forward model. However, due to the high cost and long period taken to acquire and accumulate effective field data, the main method of on-orbit calibration is still cross-calibration between two satellites or between satellite and model.
The on-orbit calibration described in this study is one method to improve the accuracy of BT data for CMRs in the HY-2 satellite constellation. In order to improve the accuracy of products in the HY-2 satellite constellation, the task of optimizing calibration equations and retrieval algorithms to WPD from multiple directions must continue, including on-orbit calibration, adapting retrieval algorithms to various latitudes or different wind speeds, building special retrieval algorithms for inshore products, etc. Improving CMR products is a systematic project; in the future, special retrieval algorithms will be used according to wind speed or pertinent regions. Though the constellation has operated for a short time and some effective data are missing, this study has proved the effectiveness of on-orbit calibration, and the current calibration equations can still be further optimized. With more data, this method will further improve the accuracy of WPD in the HY-2 satellite constellation.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}