
Weed–Crop Segmentation in Drone Images with a Novel Encoder–Decoder Framework Enhanced via Attention Modules



Abstract
:1. Introduction
- A novel framework is introduced to automatically distinguish between weeds and crops in high-resolution drone images.
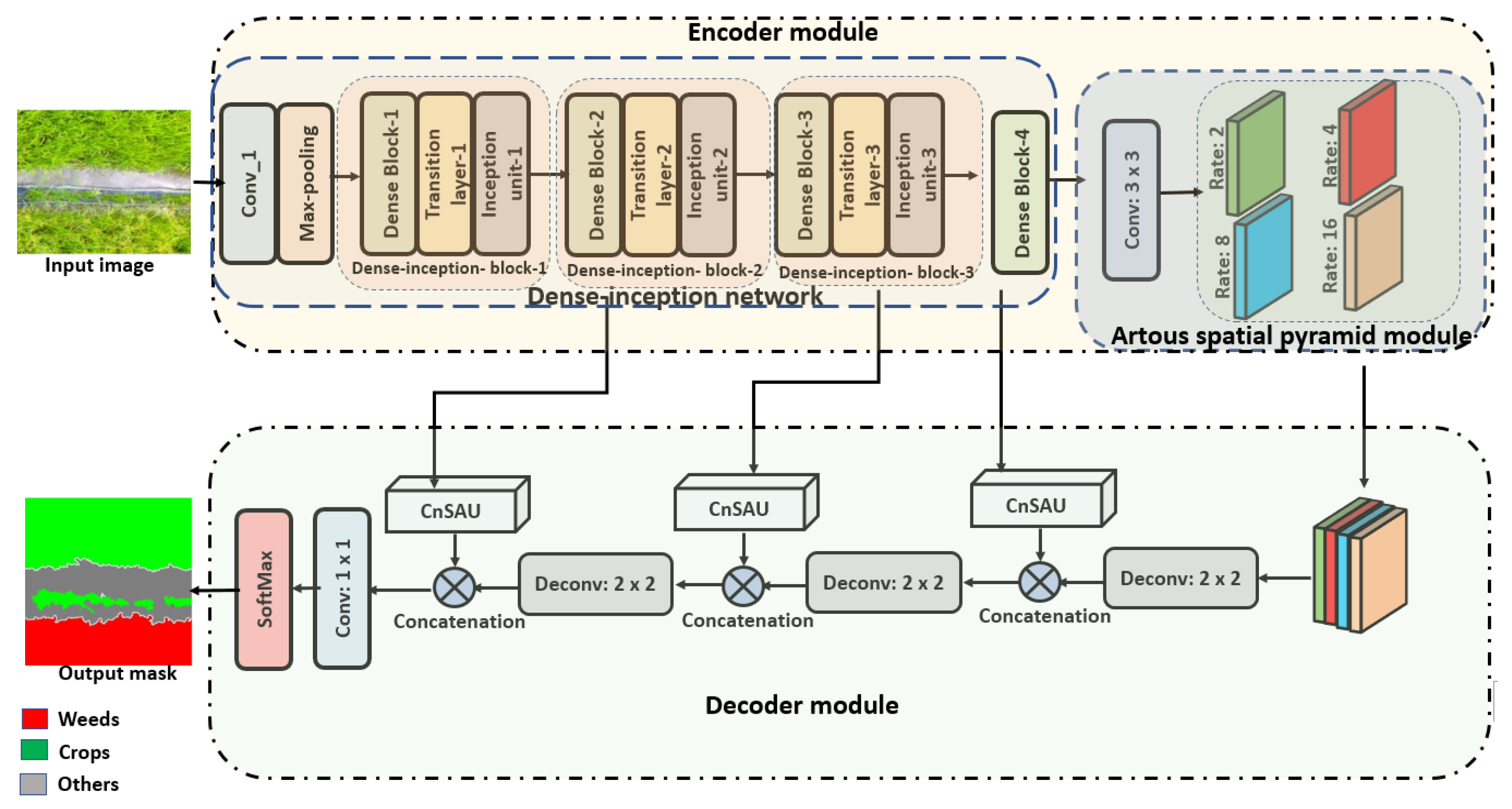
- The framework incorporates a Dense-inception network within its encoder component, which seamlessly integrates with the Artous spatial pyramid pooling module. This integration enables the extraction of multi-scale features and facilitates the capture of both local and global contextual information.
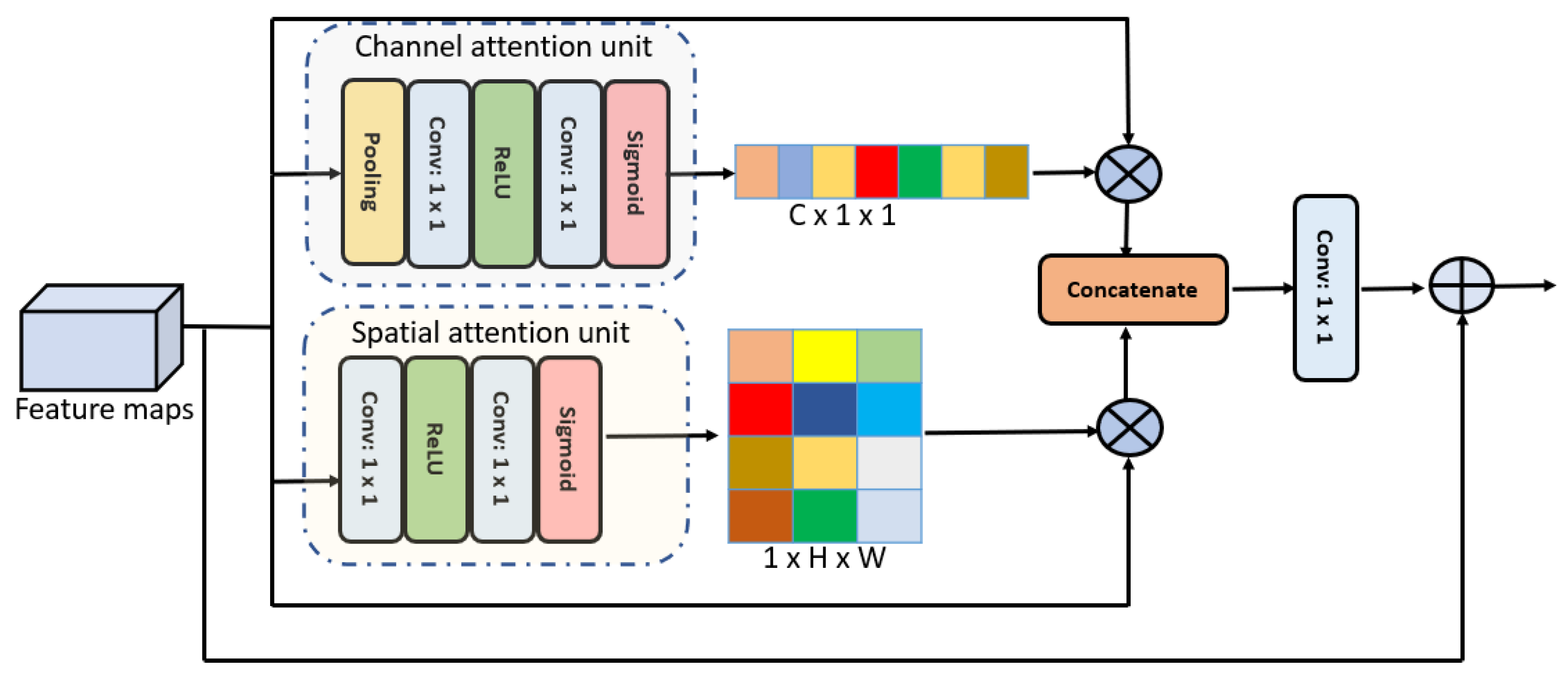
- The decoder part of the framework effectively integrates deconvolution and attention units to recover spatial information and boost the localization of weeds and crops in drone images.
- The performance of the proposed framework is evaluated on a publicly available benchmark dataset. From the experiments’ results, it is demonstrated that the proposed framework precisely identifies weeds and crops in complex drone images and consequently beats other state-of-the-art methods in terms of performance standards.
2. Related Work
2.1. Traditional Image Processing Models
2.2. Deep Learning Models
3. Proposed Methodology
3.1. Encoder Module
3.2. Decoder
4. Results and Discussion
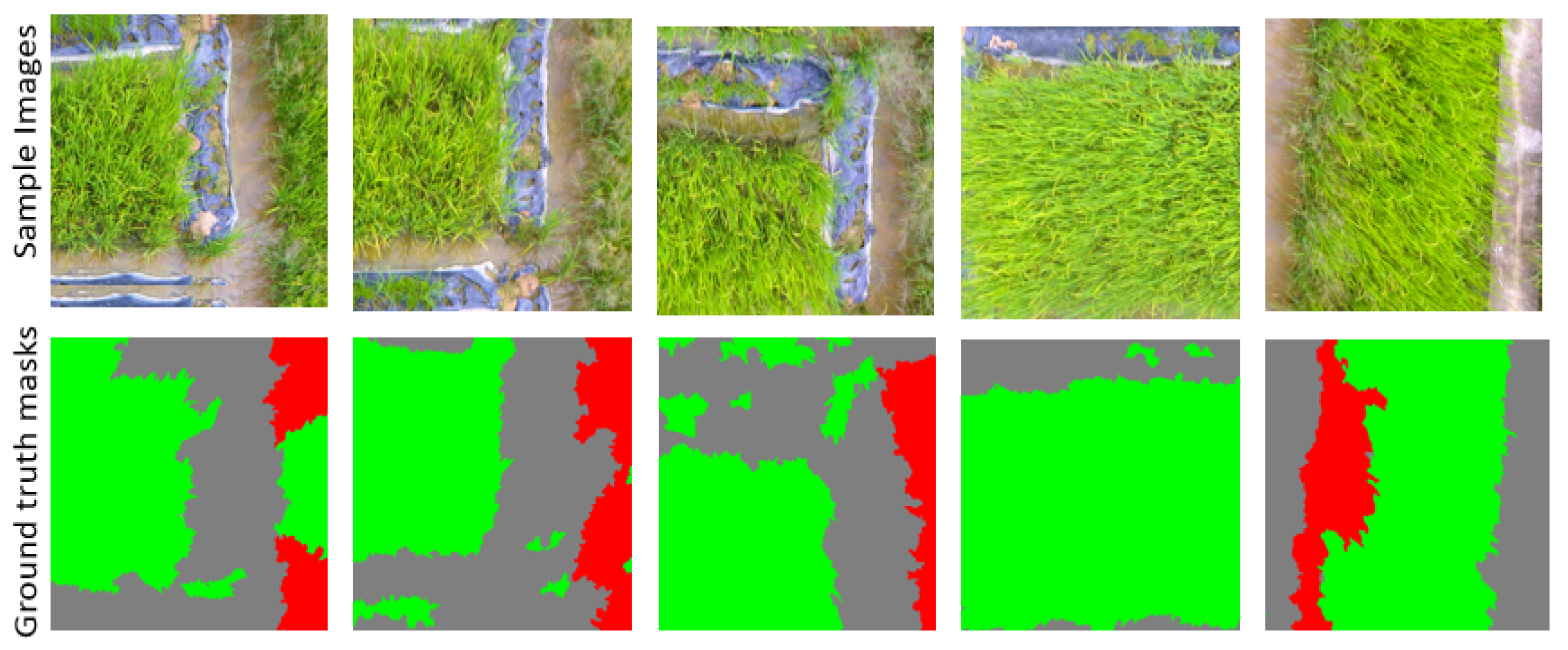
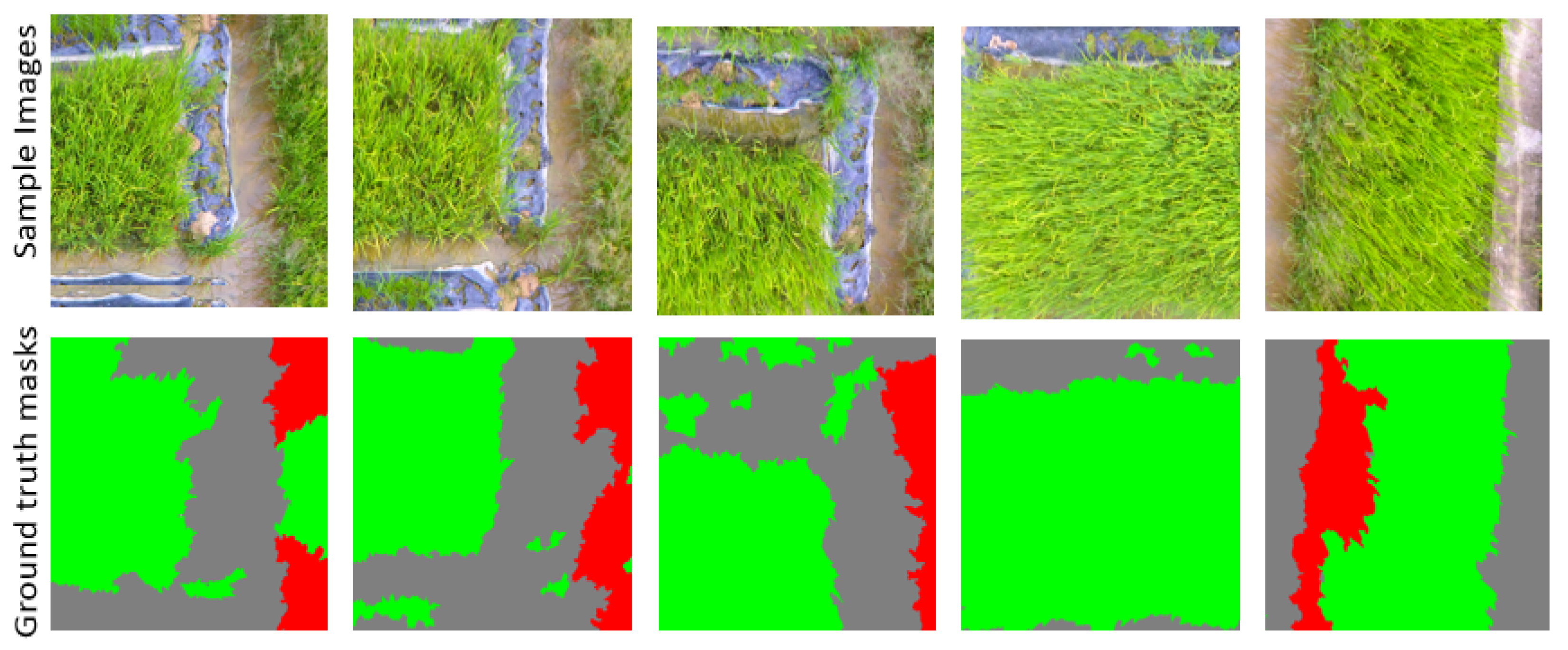
4.1. Dataset
4.2. Evaluation Metrics
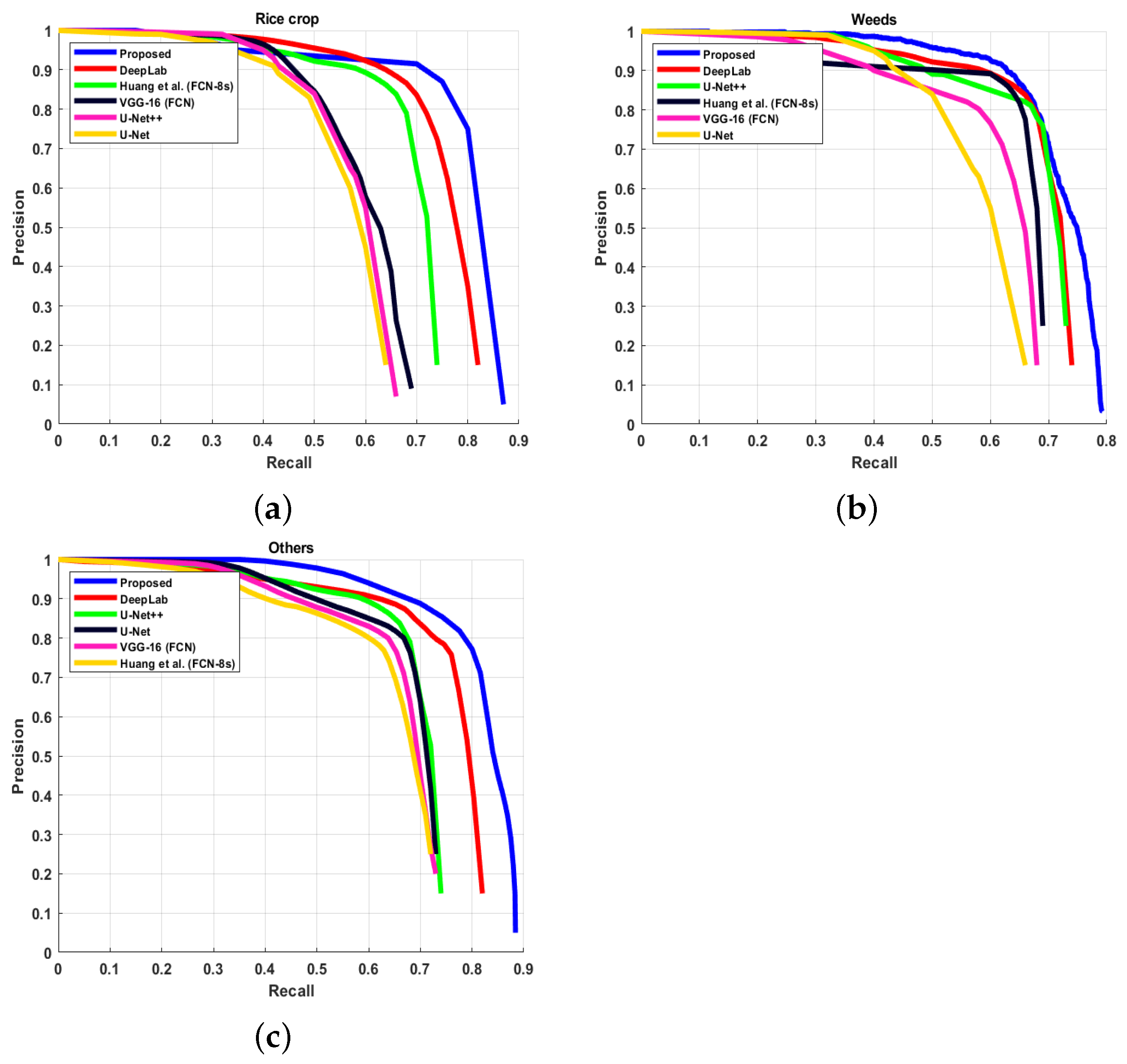
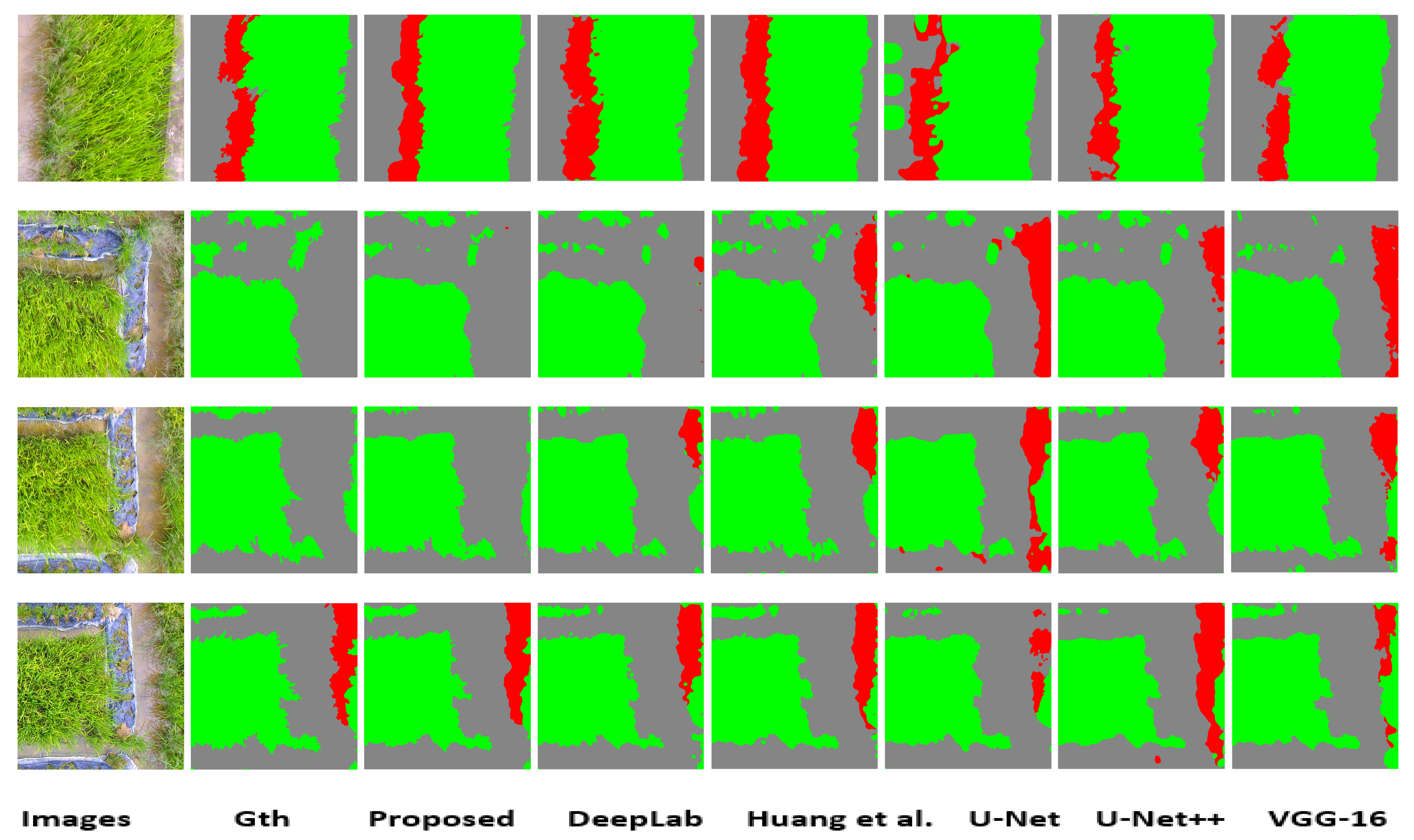
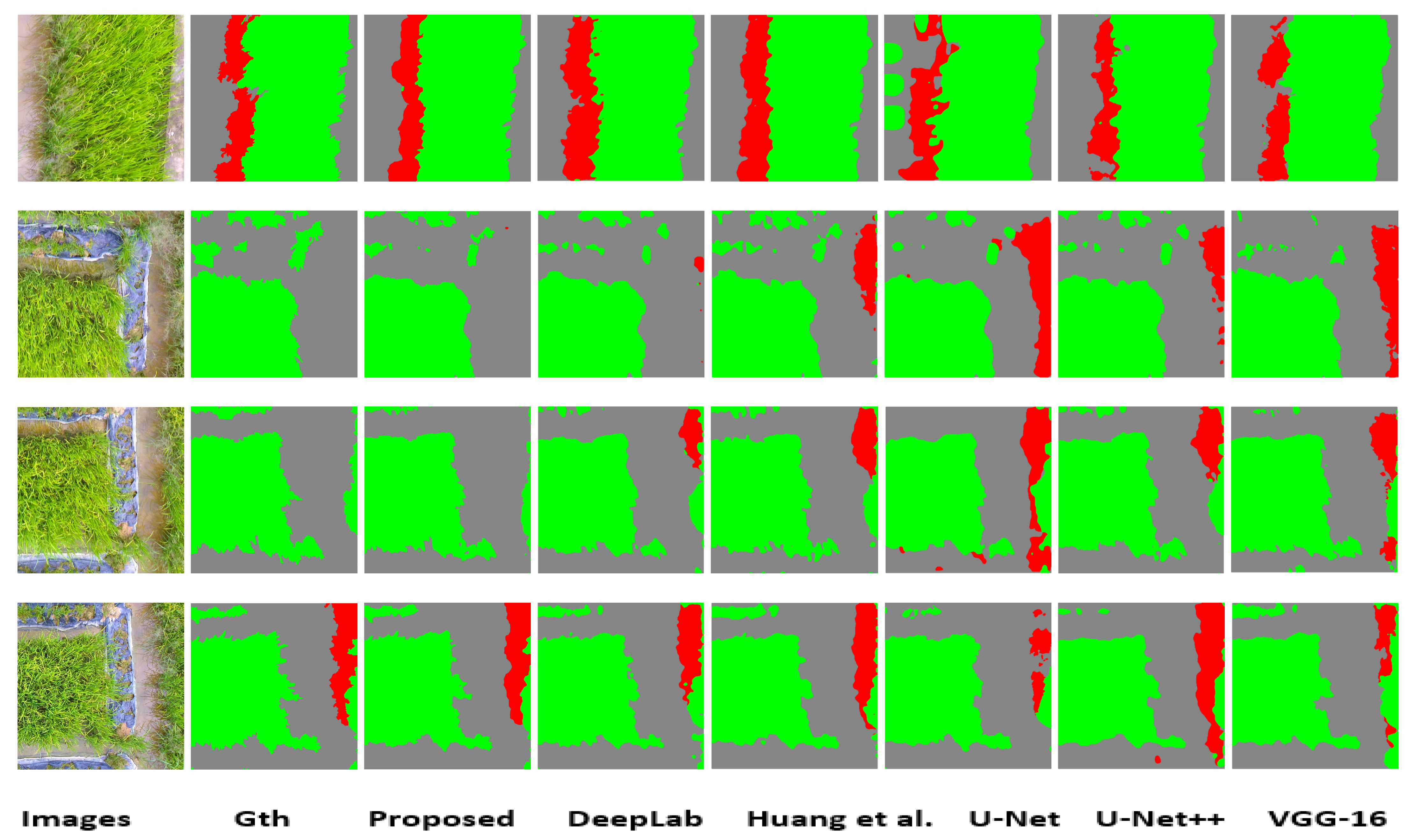
4.3. Comparisons and Discussion
4.4. Ablation Study
4.4.1. Ablation Study of Encoder Part
- Methods M1, M4, and M7 serve as the baseline approaches, employing the VGG-16, DenseNet, and DenseInception networks, respectively, as the encoder networks. These methods do not incorporate an ASPP module in their configurations.
- Methods M2, M5, and M8 employ the VGG-16, DenseNet, and DenseInception networks, respectively, as the encoder network and also incorporate the ASPP module with a dilation rate of (1, 2, 3, 4).
- Methods M3, M6, and M9 employ the VGG-16, DenseNet, and DenseInception networks, respectively, as the encoder network and also incorporate the ASPP module with a dilation rate of (2, 4, 8, 16).
4.4.2. Ablation Study of Decoder Part
- Method M1 employs the DenseInception Network and incorporates the ASPP module in the encoder module. Additionally, method M1 utilizes the channel attention unit with an average pooling operation.
- Method M2 follows the same pipeline as method M1; however, method M2 utilizes the channel attention unit with a max pooling operation.
- Method M3 adopts a similar encoder pipeline as method M1; however, it distinguishes itself in the decoder part by incorporating spatial attention only.
- Method M4 adopts a similar encoder pipeline as method M1; however, its decoder part employs both the spatial attention unit and the channel attention unit with a max pooling operation.
- Method M5 shares similarities with M4 in both the encoder and decoder components. However, in its decoder part, method M5 incorporates a channel attention unit with an average pooling operation.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sharma, A.; Jain, A.; Gupta, P.; Chowdary, V. Machine learning applications for precision agriculture: A comprehensive review. IEEE Access 2020, 9, 4843–4873. [Google Scholar] [CrossRef]
- Hasan, A.M.; Sohel, F.; Diepeveen, D.; Laga, H.; Jones, M.G. A survey of deep learning techniques for weed detection from images. Comput. Electron. Agric. 2021, 184, 106067. [Google Scholar] [CrossRef]
- Shinde, Y.A.; Jagtap, M.P.; Patil, M.G.; Khatri, N. Experimental investigation on the effect of soil solarization incorporating black, silver, and transparent polythene, and straw as mulch, on the microbial population and weed growth. Chemosphere 2023, 336, 139263. [Google Scholar] [CrossRef] [PubMed]
- Peña, J.M.; Torres-Sánchez, J.; de Castro, A.I.; Kelly, M.; López-Granados, F. Weed mapping in early-season maize fields using object-based analysis of unmanned aerial vehicle (UAV) images. PLoS ONE 2013, 8, e77151. [Google Scholar] [CrossRef] [PubMed]
- Bàrberi, P. Weed management in organic agriculture: Are we addressing the right issues? Weed Res. 2002, 42, 177–193. [Google Scholar] [CrossRef]
- López-Granados, F.; Torres-Sánchez, J.; Serrano-Pérez, A.; de Castro, A.I.; Mesas-Carrascosa, F.J.; Peña, J.M. Early season weed mapping in sunflower using UAV technology: Variability of herbicide treatment maps against weed thresholds. Precis. Agric. 2016, 17, 183–199. [Google Scholar] [CrossRef]
- Urbahs, A.; Jonaite, I. Features of the use of unmanned aerial vehicles for agriculture applications. Aviation 2013, 17, 170–175. [Google Scholar] [CrossRef]
- Lu, Y.; Young, S. A survey of public datasets for computer vision tasks in precision agriculture. Comput. Electron. Agric. 2020, 178, 105760. [Google Scholar] [CrossRef]
- Tian, H.; Wang, T.; Liu, Y.; Qiao, X.; Li, Y. Computer vision technology in agricultural automation—A review. Inf. Process. Agric. 2020, 7, 1–19. [Google Scholar] [CrossRef]
- Ahmad, A.; Saraswat, D.; El Gamal, A. A survey on using deep learning techniques for plant disease diagnosis and recommendations for development of appropriate tools. Smart Agric. Technol. 2022, 3, 100083. [Google Scholar] [CrossRef]
- Palanivel, K.; Surianarayanan, C. An approach for prediction of crop yield using machine learning and big data techniques. Int. J. Comput. Eng. Technol. 2019, 10, 110–118. [Google Scholar] [CrossRef]
- Kamir, E.; Waldner, F.; Hochman, Z. Estimating wheat yields in Australia using climate records, satellite image time series and machine learning methods. Isprs J. Photogramm. Remote. Sens. 2020, 160, 124–135. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Daloye, A.M.; Erkbol, H.; Fritschi, F.B. Crop monitoring using satellite/UAV data fusion and machine learning. Remote Sens. 2020, 12, 1357. [Google Scholar] [CrossRef]
- Fu, Z.; Jiang, J.; Gao, Y.; Krienke, B.; Wang, M.; Zhong, K.; Cao, Q.; Tian, Y.; Zhu, Y.; Cao, W.; et al. Wheat growth monitoring and yield estimation based on multi-rotor unmanned aerial vehicle. Remote Sens. 2020, 12, 508. [Google Scholar] [CrossRef]
- Tang, J.L.; Chen, X.Q.; Miao, R.H.; Wang, D. Weed detection using image processing under different illumination for site-specific areas spraying. Comput. Electron. Agric. 2016, 122, 103–111. [Google Scholar] [CrossRef]
- Islam, N.; Rashid, M.M.; Wibowo, S.; Xu, C.Y.; Morshed, A.; Wasimi, S.A.; Moore, S.; Rahman, S.M. Early weed detection using image processing and machine learning techniques in an Australian chilli farm. Agriculture 2021, 11, 387. [Google Scholar] [CrossRef]
- Burgos-Artizzu, X.P.; Ribeiro, A.; Guijarro, M.; Pajares, G. Real-time image processing for crop/weed discrimination in maize fields. Comput. Electron. Agric. 2011, 75, 337–346. [Google Scholar] [CrossRef]
- Bah, M.D.; Hafiane, A.; Canals, R. Deep learning with unsupervised data labeling for weed detection in line crops in UAV images. Remote Sens. 2018, 10, 1690. [Google Scholar] [CrossRef]
- Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Deng, X.; Zhang, L. A fully convolutional network for weed mapping of unmanned aerial vehicle (UAV) imagery. PLoS ONE 2018, 13, e0196302. [Google Scholar] [CrossRef]
- Mads, D.; Skov, M.H.; Krogh, M.A. Pixel-wise classification of weeds and crops in images by using a fully convolutional neural network. In Proceedings of the International Conference on Agricultural Engineering, Aarhus, Denmark, 26–29 June 2016; pp. 26–29. [Google Scholar]
- Sahin, H.M.; Miftahushudur, T.; Grieve, B.; Yin, H. Segmentation of weeds and crops using multispectral imaging and CRF-enhanced U-Net. Comput. Electron. Agric. 2023, 211, 107956. [Google Scholar] [CrossRef]
- Zou, K.; Chen, X.; Wang, Y.; Zhang, C.; Zhang, F. A modified U-Net with a specific data argumentation method for semantic segmentation of weed images in the field. Comput. Electron. Agric. 2021, 187, 106242. [Google Scholar] [CrossRef]
- Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Deng, X.; Wen, S.; Zhang, H.; Zhang, Y. Accurate weed mapping and prescription map generation based on fully convolutional networks using UAV imagery. Sensors 2018, 18, 3299. [Google Scholar] [CrossRef] [PubMed]
- Lottes, P.; Behley, J.; Milioto, A.; Stachniss, C. Fully convolutional networks with sequential information for robust crop and weed detection in precision farming. IEEE Robot. Autom. Lett. 2018, 3, 2870–2877. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings, Part III 18, Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Zheng, Y.; Zhu, Q.; Huang, M.; Guo, Y.; Qin, J. Maize and weed classification using color indices with support vector data description in outdoor fields. Comput. Electron. Agric. 2017, 141, 215–222. [Google Scholar] [CrossRef]
- Burks, T.; Shearer, S.; Payne, F. Classification of weed species using color texture features and discriminant analysis. Trans. Asae 2000, 43, 441–448. [Google Scholar] [CrossRef]
- Hamuda, E.; Mc Ginley, B.; Glavin, M.; Jones, E. Automatic crop detection under field conditions using the HSV colour space and morphological operations. Comput. Electron. Agric. 2017, 133, 97–107. [Google Scholar] [CrossRef]
- Jafari, A.; Mohtasebi, S.S.; Jahromi, H.E.; Omid, M. Weed detection in sugar beet fields using machine vision. Int. J. Agric. Biol 2006, 8, 602–605. [Google Scholar]
- Woebbecke, D.; Meyer, G.; Von Bargen, K.; Mortensen, D. Shape features for identifying young weeds using image analysis. Trans. ASAE 1995, 38, 271–281. [Google Scholar] [CrossRef]
- Persson, M.; Åstrand, B. Classification of crops and weeds extracted by active shape models. Biosyst. Eng. 2008, 100, 484–497. [Google Scholar] [CrossRef]
- Perez, A.; Lopez, F.; Benlloch, J.; Christensen, S. Colour and shape analysis techniques for weed detection in cereal fields. Comput. Electron. Agric. 2000, 25, 197–212. [Google Scholar] [CrossRef]
- Lin, F.; Zhang, D.; Huang, Y.; Wang, X.; Chen, X. Detection of corn and weed species by the combination of spectral, shape and textural features. Sustainability 2017, 9, 1335. [Google Scholar] [CrossRef]
- Neto, J.C.; Meyer, G.E.; Jones, D.D.; Samal, A.K. Plant species identification using Elliptic Fourier leaf shape analysis. Comput. Electron. Agric. 2006, 50, 121–134. [Google Scholar] [CrossRef]
- Chaisattapagon, N.Z.C. Effective criteria for weed identification in wheat fields using machine vision. Trans. ASAE 1995, 38, 965–974. [Google Scholar] [CrossRef]
- Meyer, G.; Mehta, T.; Kocher, M.; Mortensen, D.; Samal, A. Textural imaging and discriminant analysis for distinguishingweeds for spot spraying. Trans. ASAE 1998, 41, 1189–1197. [Google Scholar] [CrossRef]
- Bakhshipour, A.; Jafari, A.; Nassiri, S.M.; Zare, D. Weed segmentation using texture features extracted from wavelet sub-images. Biosyst. Eng. 2017, 157, 1–12. [Google Scholar] [CrossRef]
- Wu, L.; Wen, Y. Weed/corn seedling recognition by support vector machine using texture features. Afr. J. Agric. Res. 2009, 4, 840–846. [Google Scholar]
- Ishak, A.J.; Hussain, A.; Mustafa, M.M. Weed image classification using Gabor wavelet and gradient field distribution. Comput. Electron. Agric. 2009, 66, 53–61. [Google Scholar] [CrossRef]
- Ahmed, F.; Bari, A.H.; Shihavuddin, A.; Al-Mamun, H.A.; Kwan, P. A study on local binary pattern for automated weed classification using template matching and support vector machine. In Proceedings of the 2011 IEEE 12th International Symposium on Computational Intelligence and Informatics (CINTI), Budapest, Hungary, 21–22 November 2011; IEEE: New York, NY, USA, 2011; pp. 329–334. [Google Scholar]
- Yu, J.; Sharpe, S.M.; Schumann, A.W.; Boyd, N.S. Deep learning for image-based weed detection in turfgrass. Eur. J. Agron. 2019, 104, 78–84. [Google Scholar] [CrossRef]
- You, J.; Liu, W.; Lee, J. A DNN-based semantic segmentation for detecting weed and crop. Comput. Electron. Agric. 2020, 178, 105750. [Google Scholar] [CrossRef]
- Jin, X.; Che, J.; Chen, Y. Weed identification using deep learning and image processing in vegetable plantation. IEEE Access 2021, 9, 10940–10950. [Google Scholar] [CrossRef]
- Duan, K.; Bai, S.; Xie, L.; Qi, H.; Huang, Q.; Tian, Q. Centernet: Keypoint triplets for object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 6569–6578. [Google Scholar]
- Razfar, N.; True, J.; Bassiouny, R.; Venkatesh, V.; Kashef, R. Weed detection in soybean crops using custom lightweight deep learning models. J. Agric. Food Res. 2022, 8, 100308. [Google Scholar] [CrossRef]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- dos Santos Ferreira, A.; Freitas, D.M.; da Silva, G.G.; Pistori, H.; Folhes, M.T. Weed detection in soybean crops using ConvNets. Comput. Electron. Agric. 2017, 143, 314–324. [Google Scholar] [CrossRef]
- Sodjinou, S.G.; Mohammadi, V.; Mahama, A.T.S.; Gouton, P. A deep semantic segmentation-based algorithm to segment crops and weeds in agronomic color images. Inf. Process. Agric. 2022, 9, 355–364. [Google Scholar] [CrossRef]
- Osorio, K.; Puerto, A.; Pedraza, C.; Jamaica, D.; Rodríguez, L. A deep learning approach for weed detection in lettuce crops using multispectral images. AgriEngineering 2020, 2, 471–488. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Pettorelli, N. The Normalized Difference Vegetation Index; Oxford University Press: Oxford, UK, 2013. [Google Scholar]
- Kim, Y.H.; Park, K.R. MTS-CNN: Multi-task semantic segmentation-convolutional neural network for detecting crops and weeds. Comput. Electron. Agric. 2022, 199, 107146. [Google Scholar] [CrossRef]
- Fawakherji, M.; Youssef, A.; Bloisi, D.; Pretto, A.; Nardi, D. Crop and weeds classification for precision agriculture using context-independent pixel-wise segmentation. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; IEEE: New York, NY, USA, 2019; pp. 146–152. [Google Scholar]
- Nasiri, A.; Omid, M.; Taheri-Garavand, A.; Jafari, A. Deep learning-based precision agriculture through weed recognition in sugar beet fields. Sustain. Comput. Inf. Syst. 2022, 35, 100759. [Google Scholar] [CrossRef]
- Khan, A.; Ilyas, T.; Umraiz, M.; Mannan, Z.I.; Kim, H. Ced-net: Crops and weeds segmentation for smart farming using a small cascaded encoder-decoder architecture. Electronics 2020, 9, 1602. [Google Scholar] [CrossRef]
- Xu, B.; Fan, J.; Chao, J.; Arsenijevic, N.; Werle, R.; Zhang, Z. Instance segmentation method for weed detection using UAV imagery in soybean fields. Comput. Electron. Agric. 2023, 211, 107994. [Google Scholar] [CrossRef]
- Janneh, L.L.; Zhang, Y.; Cui, Z.; Yang, Y. Multi-level feature re-weighted fusion for the semantic segmentation of crops and weeds. J. King Saud Univ.-Comput. Inf. Sci. 2023, 35, 101545. [Google Scholar] [CrossRef]
- Zhang, J.; Gong, J.; Zhang, Y.; Mostafa, K.; Yuan, G. Weed Identification in Maize Fields Based on Improved Swin-Unet. Agronomy 2023, 13, 1846. [Google Scholar] [CrossRef]
- Weyler, J.; Läbe, T.; Magistri, F.; Behley, J.; Stachniss, C. Towards Domain Generalization in Crop and Weed Segmentation for Precision Farming Robots. IEEE Robot. Autom. Lett. 2023, 8, 3310–3317. [Google Scholar] [CrossRef]
- Bertoglio, R.; Mazzucchelli, A.; Catalano, N.; Matteucci, M. A comparative study of Fourier transform and CycleGAN as domain adaptation techniques for weed segmentation. Smart Agric. Technol. 2023, 4, 100188. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, W.; Wei, X. A review on weed detection using ground-based machine vision and image processing techniques. Comput. Electron. Agric. 2019, 158, 226–240. [Google Scholar] [CrossRef]
- Wu, Z.; Chen, Y.; Zhao, B.; Kang, X.; Ding, Y. Review of weed detection methods based on computer vision. Sensors 2021, 21, 3647. [Google Scholar] [CrossRef] [PubMed]
- Rakhmatulin, I.; Kamilaris, A.; Andreasen, C. Deep neural networks to detect weeds from crops in agricultural environments in real-time: A review. Remote Sens. 2021, 13, 4486. [Google Scholar] [CrossRef]
- Hu, Y.; Li, J.; Huang, Y.; Gao, X. Channel-wise and spatial feature modulation network for single image super-resolution. IEEE Trans. Circuits Syst. Video Technol. 2019, 30, 3911–3927. [Google Scholar] [CrossRef]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Type | Filter Size |
|---|---|
| Dense block | |
| Transition block | |
| Inception module |
| Methods | Rice | Weeds | Others | mIoU |
|---|---|---|---|---|
| VGG-16 (FCN ) | 0.72 | 0.71 | 0.75 | 0.73 |
| GoogleNet (FCN) | 0.7 | 0.69 | 0.74 | 0.71 |
| AlexNet (FCN) | 0.62 | 0.6 | 0.67 | 0.63 |
| U-Net | 0.7 | 0.68 | 0.76 | 0.71 |
| U-Net++ | 0.71 | 0.74 | 0.77 | 0.74 |
| SegNet | 0.71 | 0.65 | 0.7 | 0.69 |
| DeepLab | 0.79 | 0.75 | 0.81 | 0.78 |
| Huang et al. (FCN-8s) [23] | 0.75 | 0.72 | 0.74 | 0.74 |
| Proposed | 0.81 | 0.79 | 0.84 | 0.81 |
| Methods | Encoder Network | ASPP Module | mIoU |
|---|---|---|---|
| M1 | VGG-16 | - | 0.71 |
| M2 | Dilation rate (1, 2, 3, 4) | 0.74 | |
| M3 | Dilation rate (2, 4, 8, 16) | 0.77 | |
| M4 | DenseNet | - | 0.73 |
| M5 | Dilation rate (1, 2, 3, 4) | 0.73 | |
| M6 | Dilation rate (2, 4, 8, 16) | 0.76 | |
| M7 | DenseInception (Proposed) | - | 0.75 |
| M8 | Dilation rate (1, 2, 3, 4) | 0.77 | |
| M9 | Dilation rate (2, 4, 8, 16) | 0.81 |
| Methods | mIoU | |
|---|---|---|
| M1 | DenseInception + ASPP + Channel attenion (avg. pooling) | 0.73 |
| M2 | DenseInception + ASPP + Channel attention (max pooling) | 0.72 |
| M3 | DenseInception + ASPP + spatial attention | 0.76 |
| M4 | DenseInception + ASPP + channel attention (max) + spatial attention | 0.80 |
| M5 | DenseInception + ASPP + channel attention (avg) + spatial attention | 0.81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, S.D.; Basalamah, S.; Lbath, A. Weed–Crop Segmentation in Drone Images with a Novel Encoder–Decoder Framework Enhanced via Attention Modules. Remote Sens. 2023, 15, 5615. https://doi.org/10.3390/rs15235615
Khan SD, Basalamah S, Lbath A. Weed–Crop Segmentation in Drone Images with a Novel Encoder–Decoder Framework Enhanced via Attention Modules. Remote Sensing. 2023; 15(23):5615. https://doi.org/10.3390/rs15235615
Chicago/Turabian StyleKhan, Sultan Daud, Saleh Basalamah, and Ahmed Lbath. 2023. "Weed–Crop Segmentation in Drone Images with a Novel Encoder–Decoder Framework Enhanced via Attention Modules" Remote Sensing 15, no. 23: 5615. https://doi.org/10.3390/rs15235615
APA StyleKhan, S. D., Basalamah, S., & Lbath, A. (2023). Weed–Crop Segmentation in Drone Images with a Novel Encoder–Decoder Framework Enhanced via Attention Modules. Remote Sensing, 15(23), 5615. https://doi.org/10.3390/rs15235615