
Extracting Citrus in Southern China (Guangxi Region) Based on the Improved DeepLabV3+ Network


 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
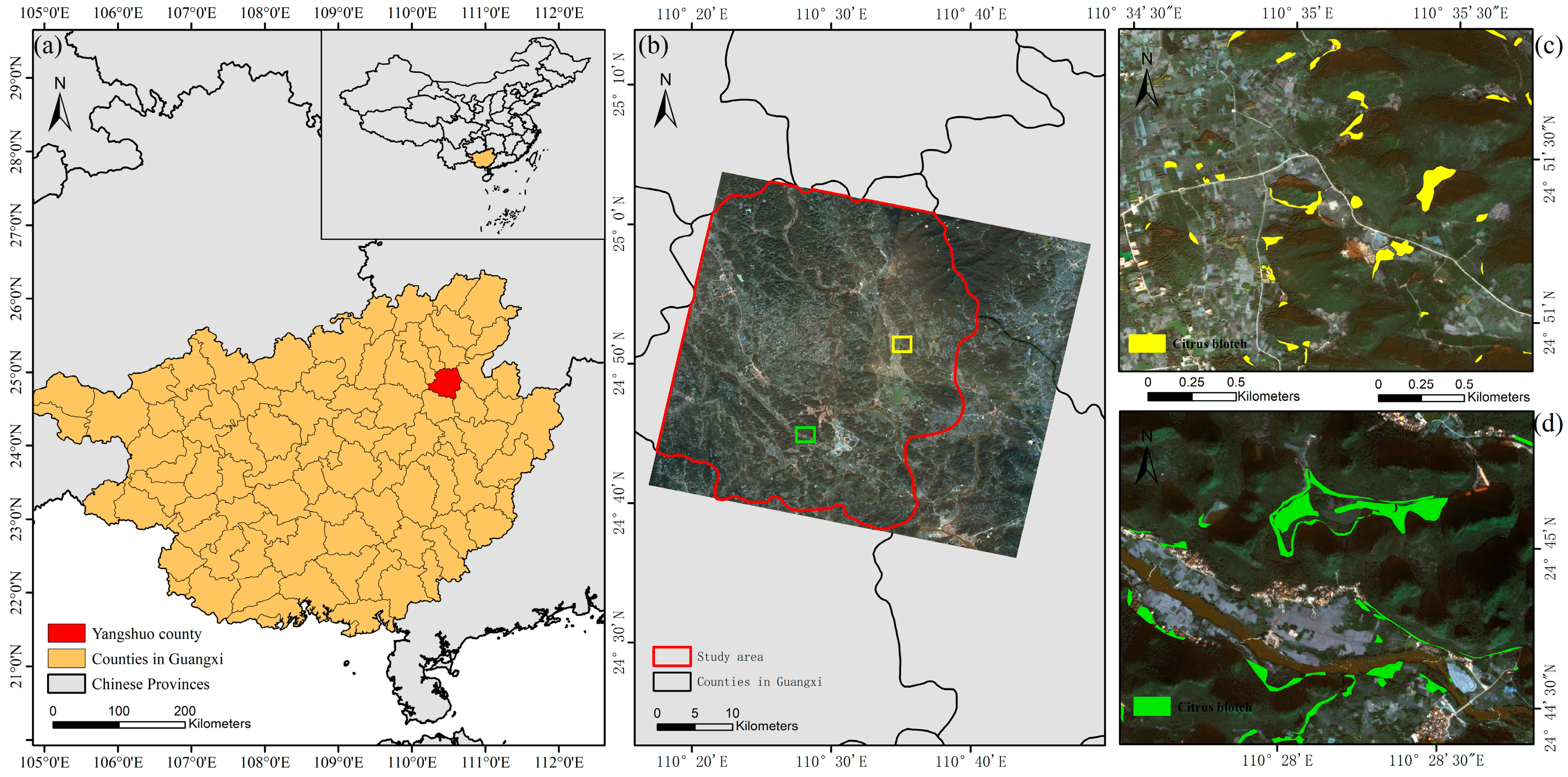
2.1. Study Area and Data
2.1.1. Study Area
2.1.2. Data
2.2. Methods
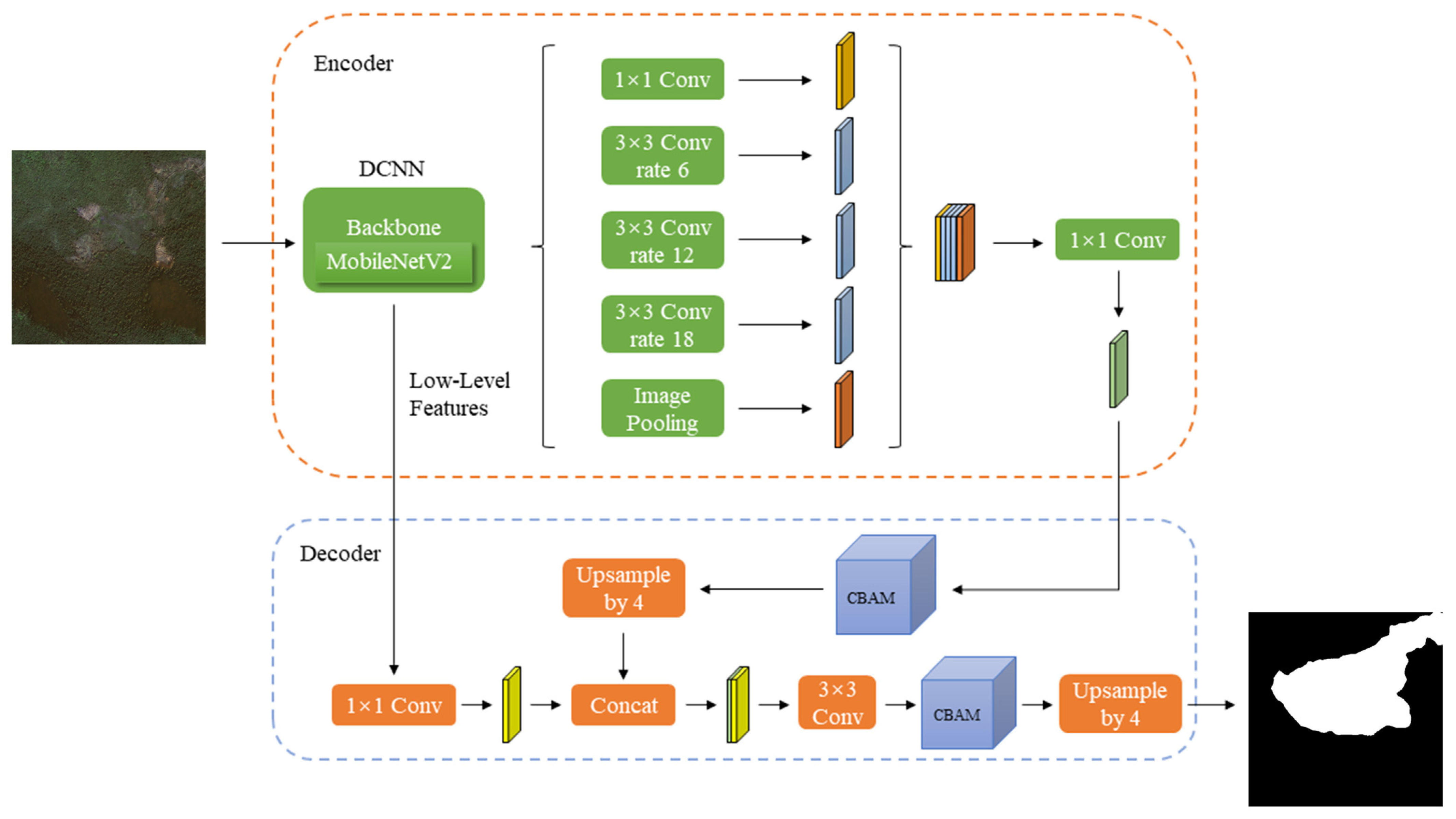
2.2.1. Improved DeepLabV3+ Network Modeling
2.2.2. Backbone Feature Extraction Network
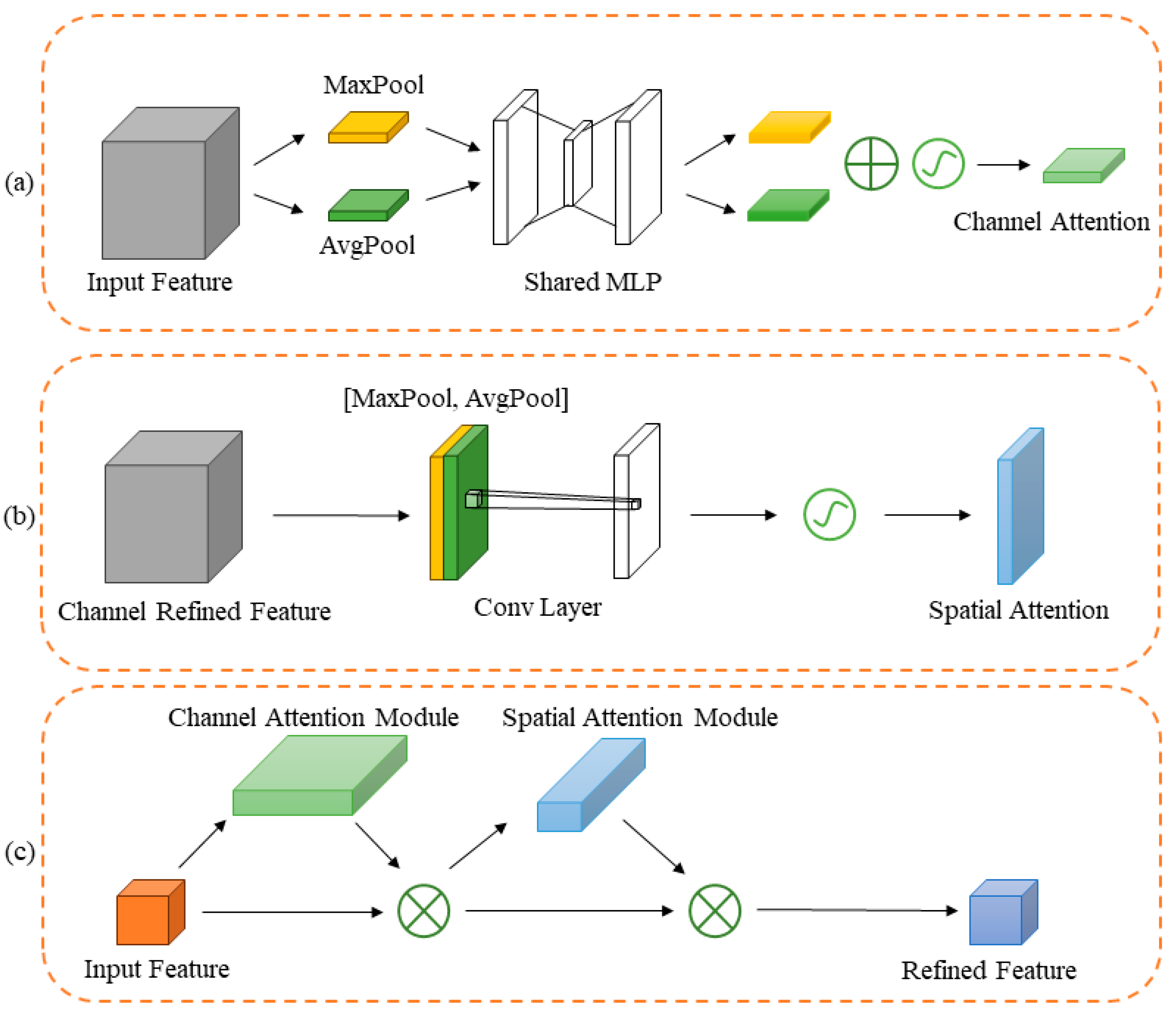
2.2.3. Convolutional Block Attention Module
2.2.4. Evaluation Metrics
2.2.5. Dataset Production
2.2.6. Experimental Setting
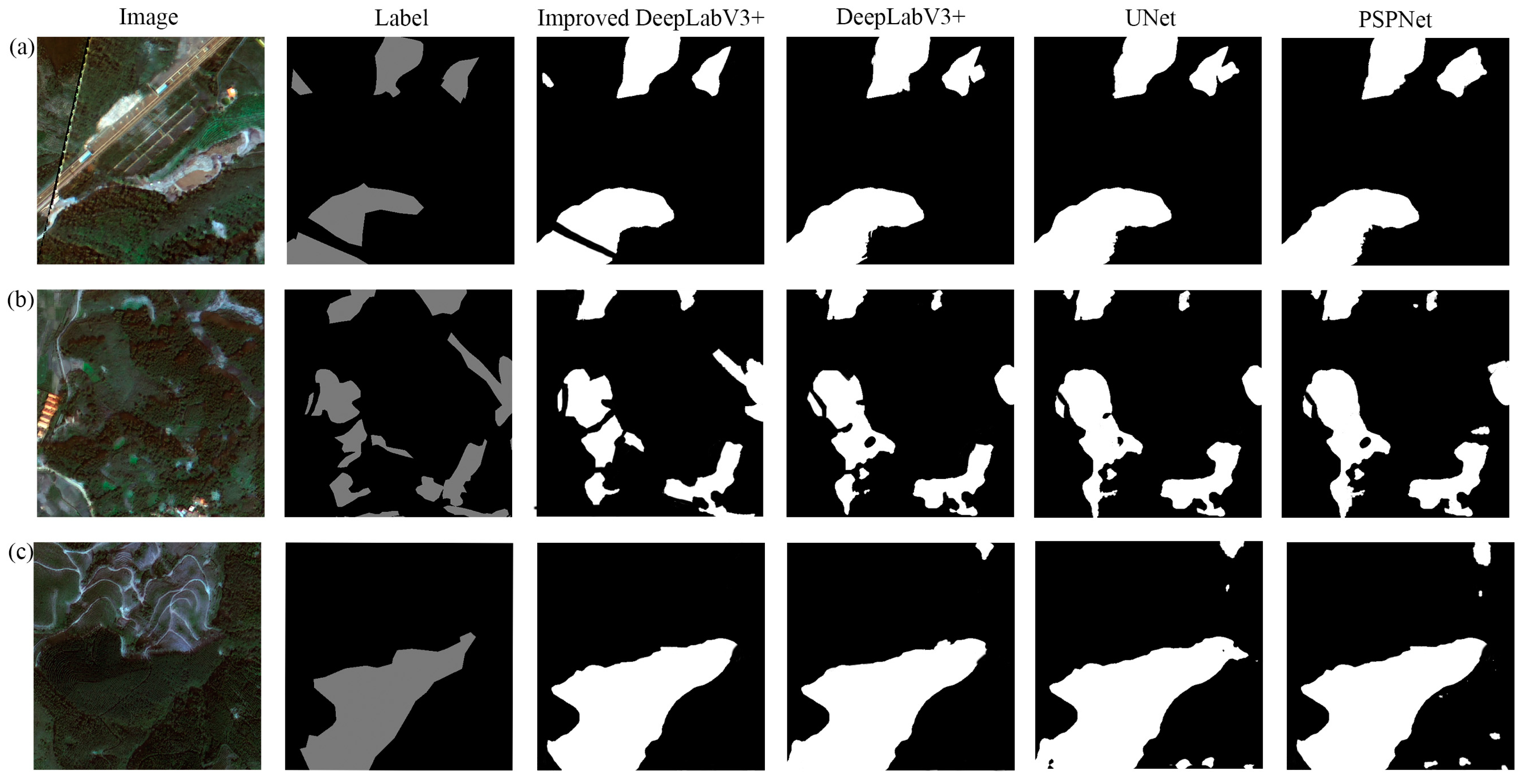
3. Results and Analyses
3.1. Model Training Results
3.2. Ablation Experiment
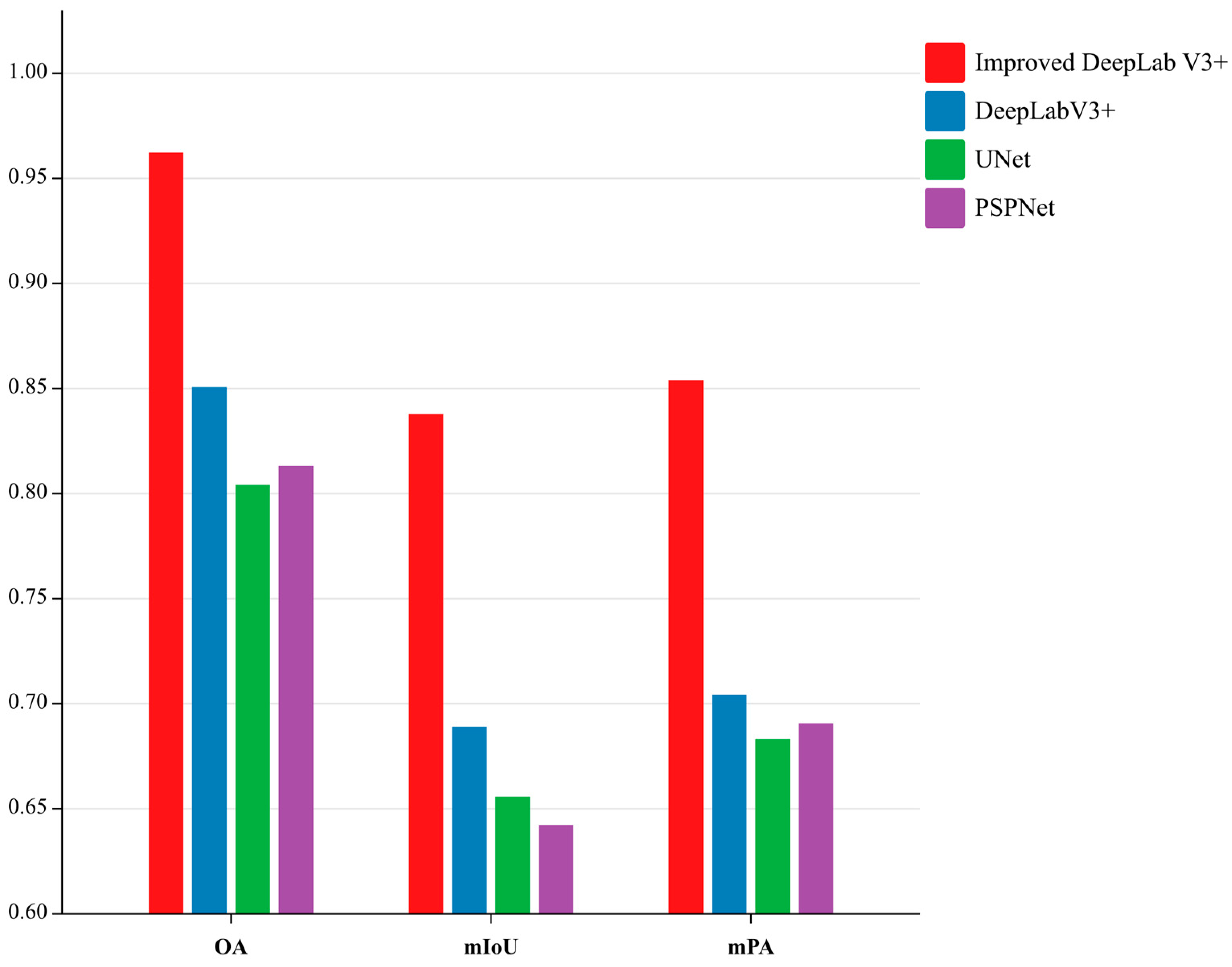
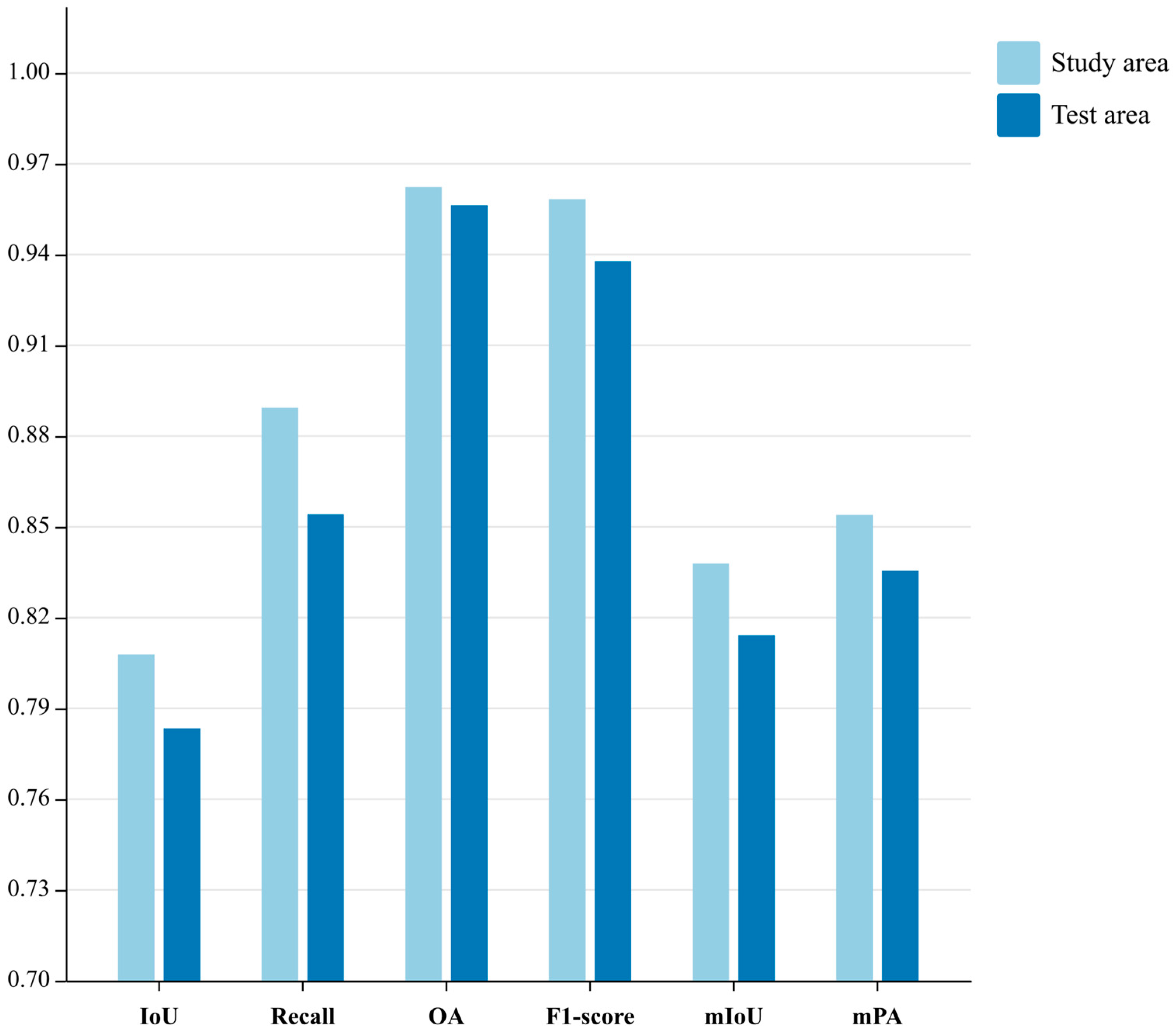
3.3. Migrability of the Segmentation Model
4. Discussion
4.1. Model Evaluation
4.2. Future Prospects
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Y.; Wang, Y.; Wang, J.; Yuan, Y.; Zhang, Z. An ontology-based approach to integration of hilly citrus production knowledge. Comput. Electron. Agric. 2015, 113, 24–43. [Google Scholar] [CrossRef]
- Li, X.; Li, Y.; Ai, J.; Shu, Z.; Xia, J.; Xia, Y. Semantic segmentation of UAV remote sensing images based on edge feature fusing and multi-level upsampling integrated with Deeplabv3. PLoS ONE 2023, 18, e0279097. [Google Scholar] [CrossRef] [PubMed]
- Houssein, E.H.; Helmy, B.E.-d.; Oliva, D.; Elngar, A.A.; Shaban, H. A novel Black Widow Optimization algorithm for multilevel thresholding image segmentation. Expert Syst. Appl. 2021, 167, 114159. [Google Scholar] [CrossRef]
- Qin, J.; Wang, C.; Qin, G. A Multilevel Image Thresholding Method Based on Subspace Elimination Optimization. Math. Probl. Eng. 2019, 2019, 6706590. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, L.; Yu, F.; Heidari, A.A.; Wang, M.; Liang, G.; Muhammad, K.; Chen, H. Chaotic random spare ant colony optimization for multi-threshold image segmentation of 2D Kapur entropy. Knowl. Based Syst. 2021, 216, 106510. [Google Scholar] [CrossRef]
- Martino, F.D.; Sessa, S. PSO image thresholding on images compressed via fuzzy transforms. Inf. Sci. 2020, 506, 308–324. [Google Scholar] [CrossRef]
- Eusuff, M.M.; Lansey, K.E. Optimization of Water Distribution Network Design Using the Shuffled Frog Leaping Algorithm. J. Water Resour. Plan. Manag. 2003, 129, 210–225. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, M.; Heidari, A.A.; Shi, B.; Hu, Z.; Zhang, Q.; Chen, H.; Mafarja, M.; Turabieh, H. Multi-threshold image segmentation using a multi-strategy shuffled frog leaping algorithm. Expert Syst. Appl. 2022, 194, 116511. [Google Scholar] [CrossRef]
- Guobin, C.; Sun, Z.; Zhang, L. Road Identification Algorithm for Remote Sensing Images Based on Wavelet Transform and Recursive Operator. IEEE Access 2020, 8, 141824–141837. [Google Scholar] [CrossRef]
- Xu, D.; Zhao, Y.; Jiang, Y.; Zhang, C.; Sun, B.; He, X. Using Improved Edge Detection Method to Detect Mining-Induced Ground Fissures Identified by Unmanned Aerial Vehicle Remote Sensing. Remote Sens. 2021, 13, 3652. [Google Scholar] [CrossRef]
- Chetia, R.; Boruah, S.M.B.; Sahu, P.P. Quantum image edge detection using improved Sobel mask based on NEQR. Quantum Inf. Process. 2021, 20, 21. [Google Scholar] [CrossRef]
- Jan, A.; Parah, S.A.; Malik, B.A.; Rashid, M. Secure data transmission in IoTs based on CLoG edge detection. Future Gener. Comput. Syst. 2021, 121, 59–73. [Google Scholar] [CrossRef]
- Roy, S.; Das, D.; Lal, S.; Kini, J. Novel edge detection method for nuclei segmentation of liver cancer histopathology images. J. Ambient. Intell. Humaniz. Comput. 2021, 14, 479–496. [Google Scholar] [CrossRef]
- Ali, I.; Rehman, A.U.; Khan, D.M.; Khan, Z.; Shafiq, M.; Choi, J.-G. Model Selection Using K-Means Clustering Algorithm for the Symmetrical Segmentation of Remote Sensing Datasets. Symmetry 2022, 14, 1149. [Google Scholar] [CrossRef]
- Mahata, K.; Das, R.; Das, S.; Sarkar, A. Land Use Land Cover map segmentation using Remote Sensing: A Case study of Ajoy river watershed, India. J. Intell. Syst. 2020, 30, 273–286. [Google Scholar] [CrossRef]
- Pastorino, M.; Montaldo, A.; Fronda, L.; Hedhli, I.; Moser, G.; Serpico, S.B.; Zerubia, J. Multisensor and Multiresolution Remote Sensing Image Classification through a Causal Hierarchical Markov Framework and Decision Tree Ensembles. Remote Sens. 2021, 13, 849. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Dong, L.; Du, H.; Mao, F.; Han, N.; Li, X.; Zhou, G.; Zhu, D.e.; Zheng, J.; Zhang, M.; Xing, L.; et al. Very High Resolution Remote Sensing Imagery Classification Using a Fusion of Random Forest and Deep Learning Technique—Subtropical Area for Example. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 13, 113–128. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Razaque, A.; Ben Haj Frej, M.; Almi’ani, M.; Alotaibi, M.; Alotaibi, B. Improved Support Vector Machine Enabled Radial Basis Function and Linear Variants for Remote Sensing Image Classification. Sensors 2021, 21, 4431. [Google Scholar] [CrossRef]
- Alex, K.; Ilya, S.; Geoffrey, E.H. ImageNet Classification with Deep Convolutional Neural Networks. Commun. ACM 2017, 60, 84–90. [Google Scholar]
- Li, X.; Xu, F.; Xia, R.; Li, T.; Chen, Z.; Wang, X.; Xu, Z.; Lyu, X. Encoding Contextual Information by Interlacing Transformer and Convolution for Remote Sensing Imagery Semantic Segmentation. Remote Sens. 2022, 14, 4065. [Google Scholar] [CrossRef]
- Yang, Q.; Shi, L.; Han, J.; Zha, Y.; Zhu, P. Deep convolutional neural networks for rice grain yield estimation at the ripening stage using UAV-based remotely sensed images. Field Crops Res. 2019, 235, 142–153. [Google Scholar] [CrossRef]
- Su, Z.; Wang, Y.; Xu, Q.; Gao, R.; Kong, Q. LodgeNet: Improved rice lodging recognition using semantic segmentation of UAV high-resolution remote sensing images. Comput. Electron. Agric. 2022, 196, 4065. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, J.; Lei, J.; Li, S.; TU, D. Image Semantic Segmentation Based on FCN-CRF Model. In Proceedings of the 2016 International Conference on Image, Vision and Computing, Palmerston North, New Zealand, 21–22 November 2016. [Google Scholar]
- Li, X.; Xu, F.; Liu, F.; Lyu, X.; Tong, Y.; Xu, Z.; Zhou, J. A Synergistical Attention Model for Semantic Segmentation of Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5400916. [Google Scholar] [CrossRef]
- Tian, L.; Zhong, X.; Chen, M.; Wang, P. Semantic Segmentation of Remote Sensing Image Based on GAN and FCN Network Model. Sci. Program. 2021, 2021, 9491376. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Xu, F.; Liu, F.; Xia, R.; Tong, Y.; Li, L.; Xu, Z.; Lyu, X. Hybridizing Euclidean and Hyperbolic Similarities for Attentively Refining Representations in Semantic Segmentation of Remote Sensing Images. IEEE Geosci. Remote Sens. Lett. 2022, 19, 5003605. [Google Scholar] [CrossRef]
- Wang, Z.; Peng, T.; Lu, Z. Comparative Research on Forest Fire Image Segmentation Algorithms Based on Fully Convolutional Neural Networks. Forests 2022, 13, 1133. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J.; Yang, K.; Wang, L.; Su, F.; Chen, X. Semantic segmentation of high-resolution remote sensing images based on a class feature attention mechanism fused with Deeplabv3+. Comput. Geosci. 2022, 158, 104969. [Google Scholar] [CrossRef]
- Du, S.; Du, S.; Liu, B.; Zhang, X. Incorporating DeepLabv3+ and object-based image analysis for semantic segmentation of very high resolution remote sensing images. Int. J. Digit. Earth 2020, 14, 357–378. [Google Scholar] [CrossRef]
- Gu, X.; Li, S.; Ren, S.; Zheng, H.; Fan, C.; Xu, H. Adaptive enhanced swin transformer with U-net for remote sensing image segmentation. Comput. Electr. Eng. 2022, 102, 108223. [Google Scholar] [CrossRef]
- Hou, J.; Guo, Z.; Wu, Y.; Diao, W.; Xu, T. BSNet: Dynamic Hybrid Gradient Convolution Based Boundary-Sensitive Network for Remote Sensing Image Segmentation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5624022. [Google Scholar] [CrossRef]
- Lin, Z.; Guo, W. Cotton Stand Counting from Unmanned Aerial System Imagery Using MobileNet and CenterNet Deep Learning Models. Remote Sens. 2021, 13, 2822. [Google Scholar] [CrossRef]
- Li, L.; Li, H.; Peng, L.; Li, Y.; Zhou, Y.; Chai, F.; Mo, Z.; Chen, Z.; Mao, J.; Wang, W. Characterization of precipitation in the background of atmospheric pollutants reduction in Guilin: Temporal variation and source apportionment. J. Environ. Sci. 2020, 98, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Wang, C.; Wright, A.; Liu, H.; Zhang, H.; Zong, Y. Combination of GF-2 high spatial resolution imagery and land surface factors for predicting soil salinity of muddy coasts. Catena 2021, 202, 105304. [Google Scholar] [CrossRef]
- Liang, C.; Huang, Q.; Wang, S.; Wang, C.; Yu, Q.; Wu, W. Identification of citrus orchard under vegetation indexes using multi-temporal remote sensing. Trans. Chin. Soc. Agric. Eng. 2021, 37, 168–176. (In Chinese) [Google Scholar] [CrossRef]
- Kuang, X.; Guo, J.; Bai, J.; Geng, H.; Wang, H. Crop-Planting Area Prediction from Multi-Source Gaofen Satellite Images Using a Novel Deep Learning Model: A Case Study of Yangling District. Remote Sens. 2023, 15, 3792. [Google Scholar] [CrossRef]
- Sun, W.; Chen, B.; Messinger, D.W. Nearest-neighbor diffusion-based pan-sharpening algorithm for spectral images. Opt. Eng. 2014, 53, 013107. [Google Scholar] [CrossRef]
- Li, X.; Xu, F.; Lyu, X.; Gao, H.; Tong, Y.; Cai, S.; Li, S.; Liu, D. Dual attention deep fusion semantic segmentation networks of large-scale satellite remote-sensing images. Int. J. Remote Sens. 2021, 42, 3583–3610. [Google Scholar] [CrossRef]
- Mo, L.; Fan, Y.; Wang, G.; Yi, X.; Wu, X.; Wu, P. DeepMDSCBA: An Improved Semantic Segmentation Model Based on DeepLabV3+ for Apple Images. Foods 2022, 11, 3999. [Google Scholar] [CrossRef] [PubMed]
- Ma, R.; Wang, J.; Zhao, W.; Guo, H.; Dai, D.; Yun, Y.; Li, L.; Hao, F.; Bai, J.; Ma, D. Identification of Maize Seed Varieties Using MobileNetV2 with Improved Attention Mechanism CBAM. Agriculture 2022, 13, 11. [Google Scholar] [CrossRef]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L. MobileNetV2: Inverted Residuals and Linear Bottlenecks. In Proceedings of the Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Wang, C.; Zhang, R.; Chang, L. A Study on the Dynamic Effects and Ecological Stress of Eco-Environment in the Headwaters of the Yangtze River Based on Improved DeepLab V3+ Network. Remote Sens. 2022, 14, 2225. [Google Scholar] [CrossRef]
- Liu, J.; Wang, H.; Zhang, Y.; Zhao, X.; Qu, T.; Tian, H.; Lu, Y.; Su, J.; Luo, D.; Yang, Y. A Spatial Distribution Extraction Method for Winter Wheat Based on Improved U-Net. Remote Sens. 2023, 15, 3711. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Multispectral | Panchromatic |
|---|---|---|
| Spectral range | 0.45~0.52 µm | 0.45~0.90 µm |
| 0.52~0.59 µm | ||
| 0.63~0.69 µm | ||
| 0.77~0.89 µm | ||
| Spatial resolution | 4 m | 1 m |
| width | 45 km | |
| Side-swing capability | ±35° | |
| Revisit period | 5 days | |
| Coverage period | 69 days | |
| Orbital altitude | 631 km | |
| Input | Operator | t | c | n | s |
|---|---|---|---|---|---|
| 2242 × 3 | Conv2d | ─ | 32 | 1 | 2 |
| 1122 × 32 | Bottleneck | 1 | 16 | 1 | 1 |
| 1122 × 16 | Bottleneck | 6 | 24 | 2 | 2 |
| 562 × 24 | Bottleneck | 6 | 32 | 3 | 2 |
| 282 × 32 | Bottleneck | 6 | 64 | 4 | 2 |
| 142 × 96 | Bottleneck | 6 | 96 | 3 | 1 |
| 142 × 96 | Bottleneck | 6 | 160 | 3 | 2 |
| 72 × 160 | Bottleneck | 6 | 320 | 1 | 1 |
| 72 × 320 | Conv2d 1 × 1 | ─ | 1280 | 1 | 1 |
| 72 × 1280 | Avgpool 7 × 7 | ─ | ─ | 1 | ─ |
| 12 × 1 × k | Conv2d 1 × 1 | ─ | k | ─ | ─ |
| Confusion Matrix | Citrus | Non-Citrus |
|---|---|---|
| Citrus | TP | FN |
| Non-Citrus | FP | TN |
| Models | IoU | Recall | OA | F1-Score | mIoU | mPA |
|---|---|---|---|---|---|---|
| Improved DeepLabV3+ | 0.8078 | 0.8894 | 0.9623 | 0.9583 | 0.8379 | 0.8540 |
| DeepLabV3+ | 0.7046 | 0.8125 | 0.8507 | 0.8478 | 0.6891 | 0.7042 |
| UNet | 0.6839 | 0.7923 | 0.8042 | 0.8312 | 0.6558 | 0.6833 |
| PSPNet | 0.6902 | 0.8087 | 0.8132 | 0.8377 | 0.6423 | 0.6906 |
| Scheme | OA (%) | mIoU (%) | mPA (%) | Training Time (h) |
|---|---|---|---|---|
| 1 | 85.07 | 68.91 | 70.42 | 9.23 |
| 2 | 88.39 | 71.33 | 72.10 | 4.51 |
| 3 | 92.34 | 78.57 | 79.83 | 4.69 |
| 4 | 96.23 | 83.79 | 85.40 | 4.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Zhang, J.; Wang, J.; Feng, Z.; Liang, B.; Xiong, N.; Zhang, J.; Sun, X.; Li, Y.; Lin, S. Extracting Citrus in Southern China (Guangxi Region) Based on the Improved DeepLabV3+ Network. Remote Sens. 2023, 15, 5614. https://doi.org/10.3390/rs15235614
Li H, Zhang J, Wang J, Feng Z, Liang B, Xiong N, Zhang J, Sun X, Li Y, Lin S. Extracting Citrus in Southern China (Guangxi Region) Based on the Improved DeepLabV3+ Network. Remote Sensing. 2023; 15(23):5614. https://doi.org/10.3390/rs15235614
Chicago/Turabian StyleLi, Hao, Jia Zhang, Jia Wang, Zhongke Feng, Boyi Liang, Nina Xiong, Junping Zhang, Xiaoting Sun, Yibing Li, and Shuqi Lin. 2023. "Extracting Citrus in Southern China (Guangxi Region) Based on the Improved DeepLabV3+ Network" Remote Sensing 15, no. 23: 5614. https://doi.org/10.3390/rs15235614
APA StyleLi, H., Zhang, J., Wang, J., Feng, Z., Liang, B., Xiong, N., Zhang, J., Sun, X., Li, Y., & Lin, S. (2023). Extracting Citrus in Southern China (Guangxi Region) Based on the Improved DeepLabV3+ Network. Remote Sensing, 15(23), 5614. https://doi.org/10.3390/rs15235614