
A Neural Network for Hyperspectral Image Denoising by Combining Spatial–Spectral Information

 ,
,
Abstract
:1. Introduction
- (1)
- It is a consideration of the spatial–spectral correlation of hyperspectral images and the use of a neural network with multi-resolution convolutional modules to capture the spatial and spectral characteristics of objects and their surroundings.
- (2)
- It is a proposal of a loss function that balances the spatial and spectral structure of hyperspectral images, suppressing spectral distortion while preserving spatial structure information.
- (3)
- The proposed method is not specific to any particular detector and remains effective for wavelengths with poor image quality.
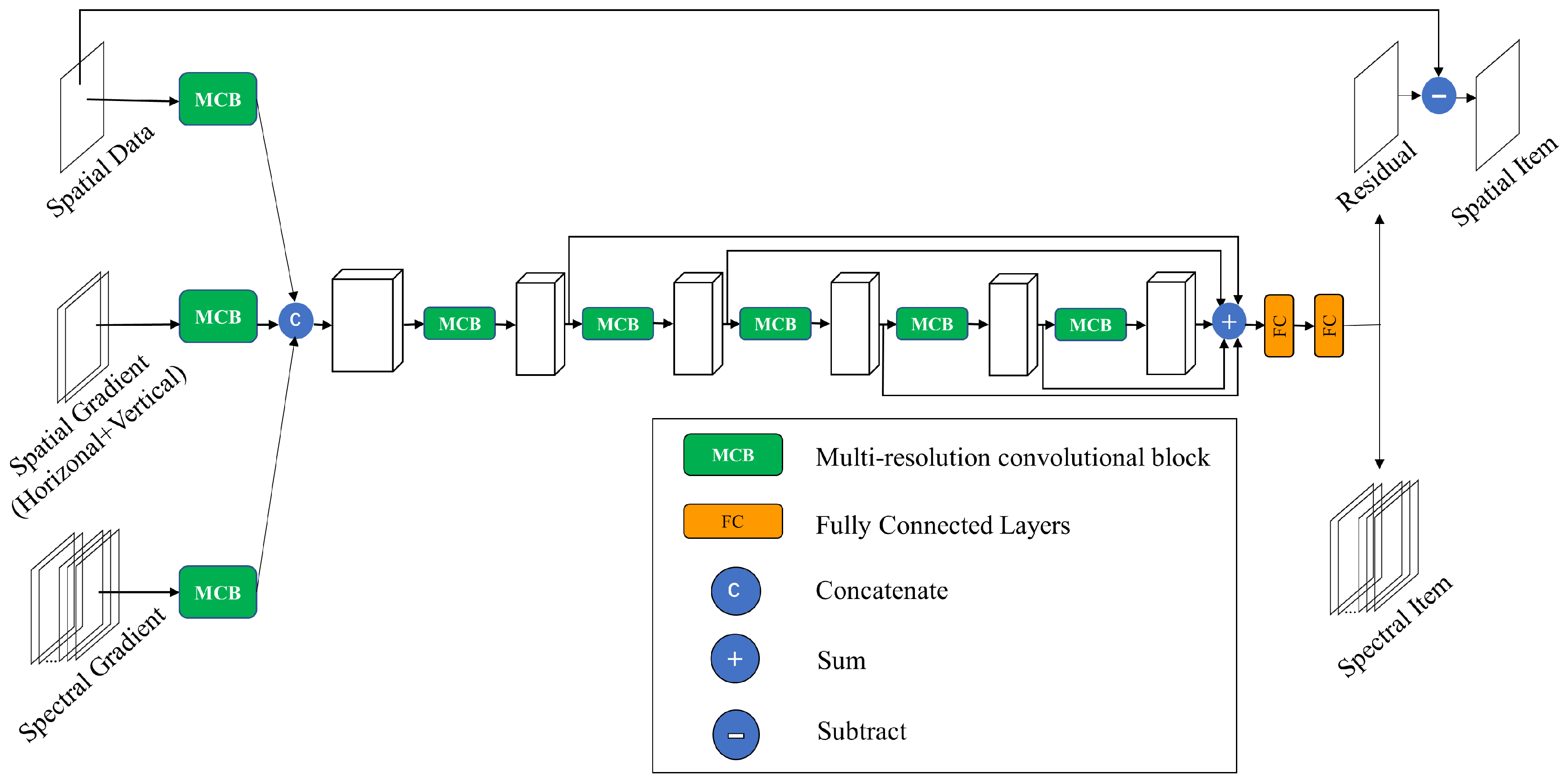
2. Spatial–Spectral Denoising Network
- (1)
- Spatial–spectral information acquisition module
- (2)
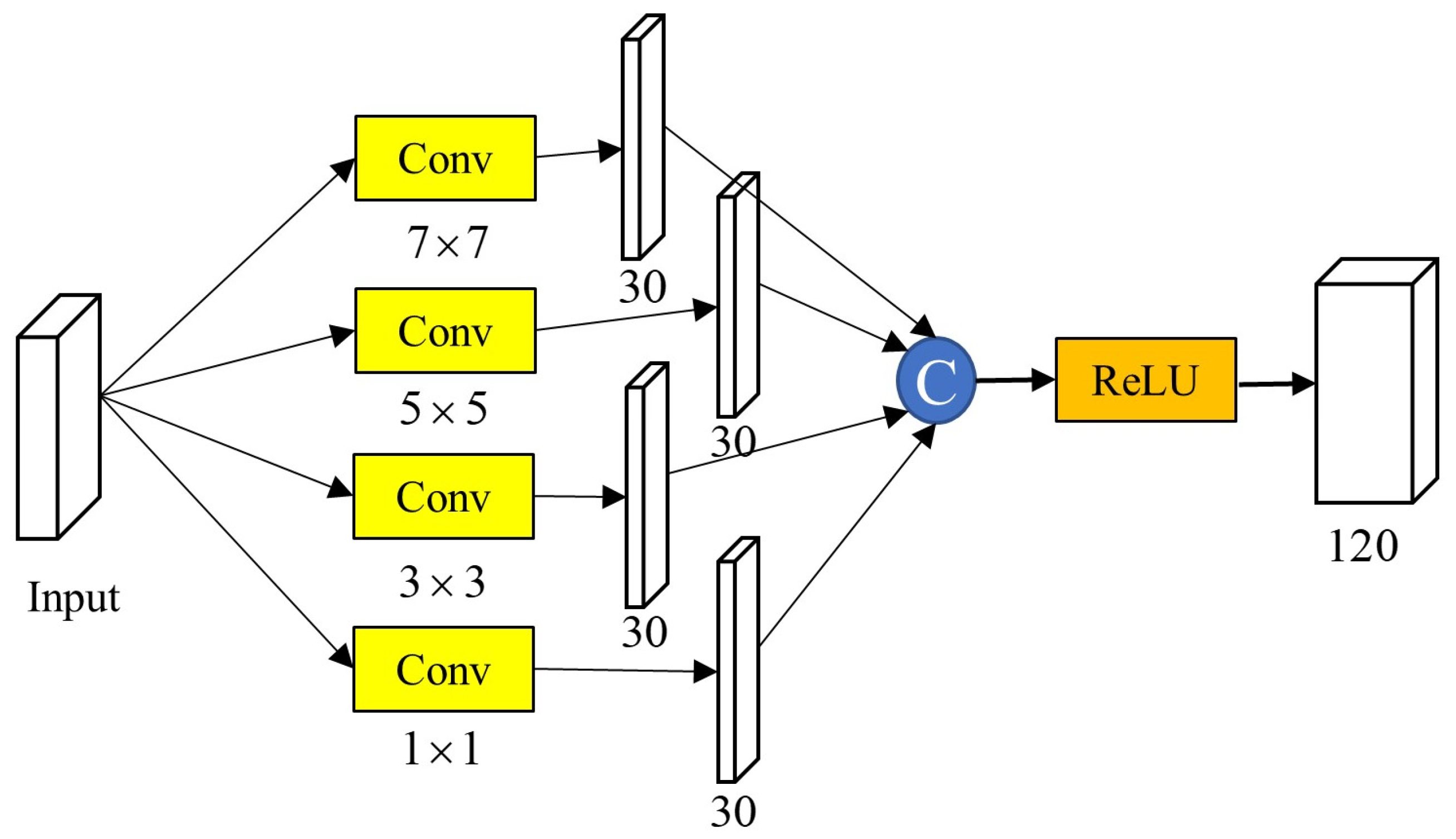
- Multi-resolution convolutional module (MCB)
- (3)
- Multi-level feature representation
- (4)
- Loss function
3. Experiments and Analysis
3.1. Experimental Setup
- (1)
- Test data set: Three data sets were used for the simulation and real data experiments.
- (a)
- The first data set was the image of the Washington DC Mall for the simulation experiments, with dimensions of 200 × 200 × 191.
- (b)
- The second data set was a 145 × 145 Indian Pines HSI taken with the Airborne Visible Infrared Imaging Spectrometer (AVIRIS), used for the real-data experiments. After removing bands heavily disturbed by the atmosphere and water, 198 bands were used for these experiments.
- (c)
- The third data set was an image acquired with the Gaofen-5 hyperspectral satellite AHSI payload, developed by the Shanghai Institute of Technical Physics, Chinese Academy of Sciences [33], with 180 spectral channels in the shortwave infrared band. An image of size 400 × 200 × 180 was captured for the experiments with real data.
- (2)
- Operating environment: All algorithms involved in this study were run in MATLAB R2019b based on the Pytorch 1.12.1 deep learning framework. The CPU processor was an Intel(R) Xeon(R) Gold 5218 CPU@2.3 GHz, and an NVIDIA GeForce RTX 3090 GPU graphics card was used.
- (3)
- Training setup: An image of the Washington DC Mall with dimensions of 1280 × 303 × 191 was acquired using onboard HYDICE sensors. It was cropped to a sub-image of 200 × 200 × 191 to test the models, and the rest were used to train the network. The data of the trained network were normalized to [0–1] before the experiment. The slice size of the training data set was 25 × 25, the sampling step was 25, and the data were rotated and folded from multiple angles. In total, 437,007 true image slices were generated. The whole training process comprised a total of 300 epochs, with each epoch containing 200 iterations and each iteration involving 128 noise–truth slice sets. The training process for the proposed model costs roughly 11 h 30 min.
- (4)
- Parameter settings: In the simulations and experiments with actual data, the number of adjacent bands of the proposed model was set to K = 24, the trade-off parameter was set to α = 0.001, the Adam optimization algorithm was used as the gradient descent optimization method, and the momentum parameters were set to 0.9, 0.999, and 10−8, respectively. The learning rate was initialized to 0.001, and every 50 generations, the learning rate was reduced by multiplying by a factor of 0.5.
3.2. Simulation Experiments
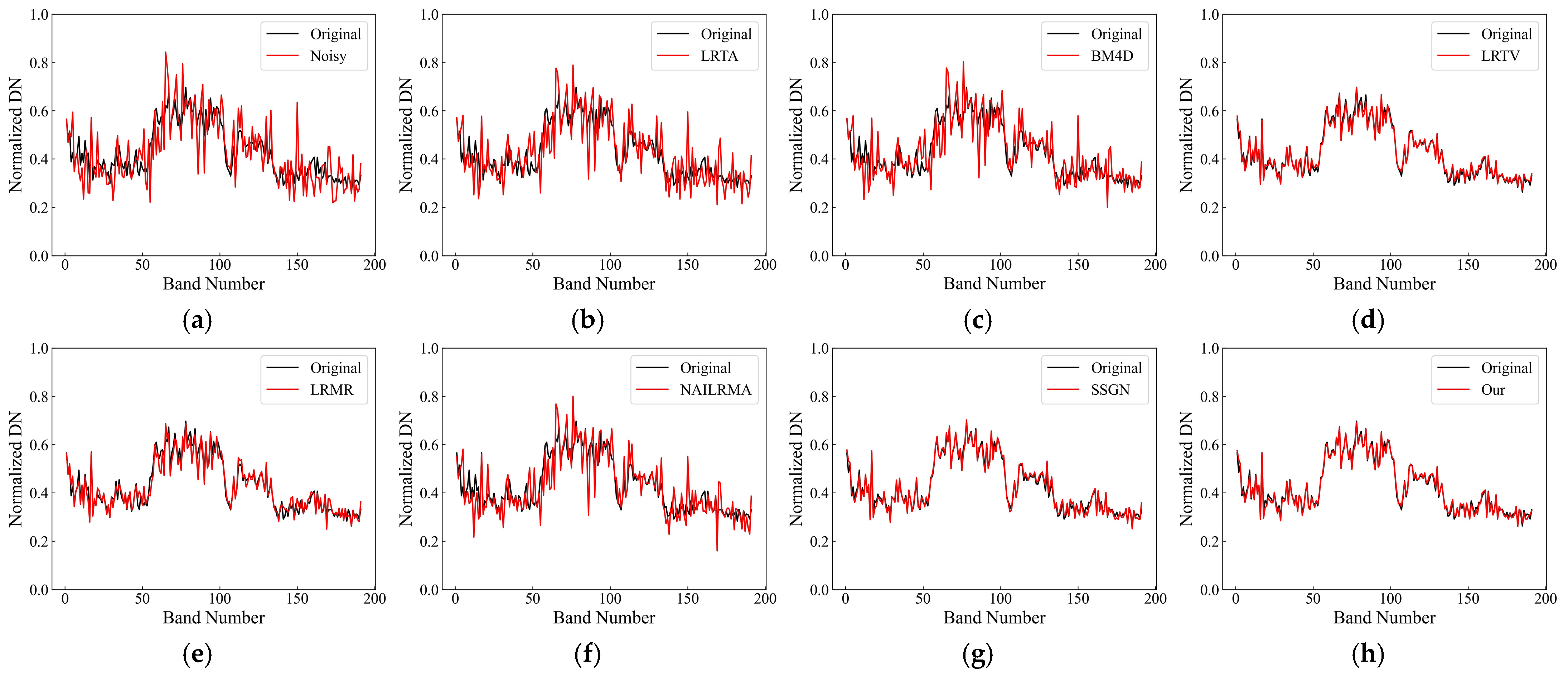
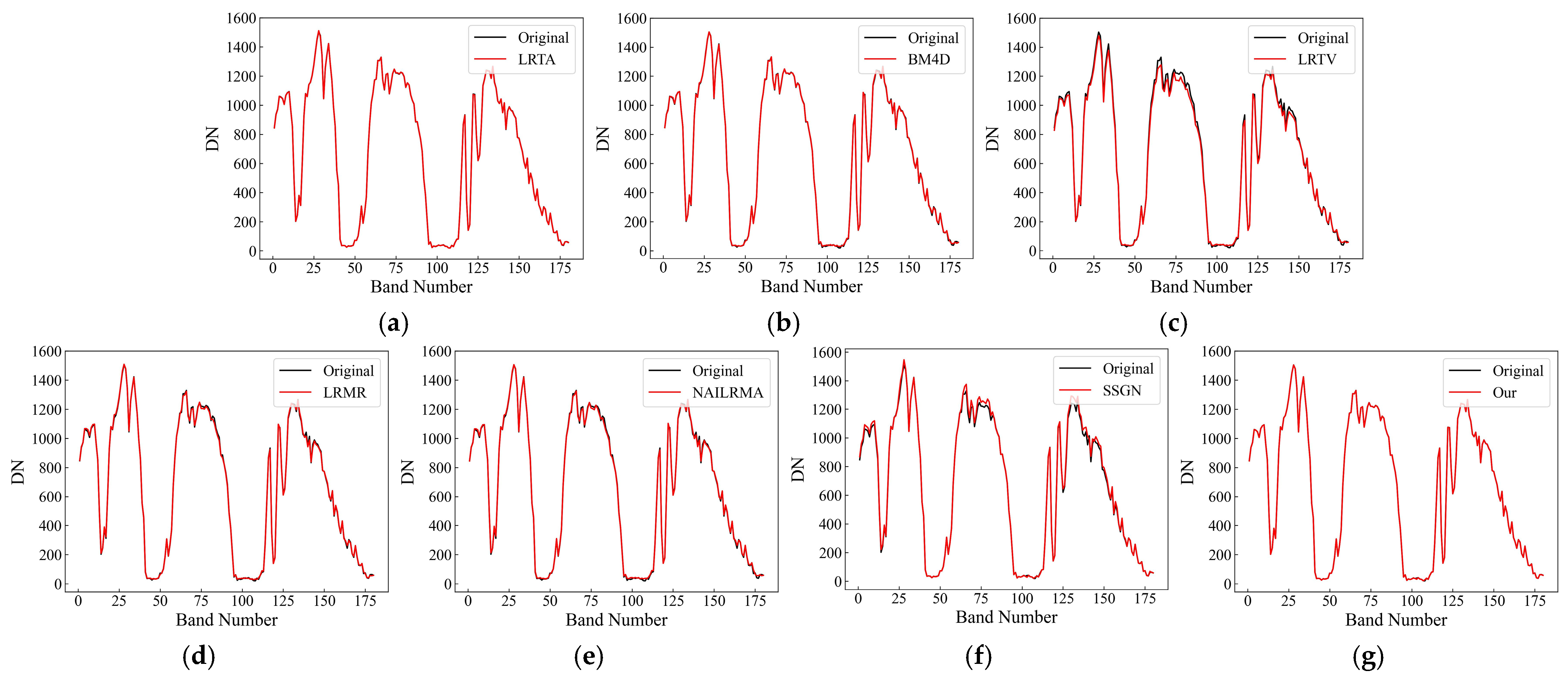
3.3. Experiments with Real Data
3.4. Classification Validation
3.5. Ablation Experiments
4. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Stuart, M.B.; McGonigle, A.J.S.; Willmott, J.R. Hyperspectral Imaging in Environmental Monitoring: A Review of Recent Developments and Technological Advances in Compact Field Deployable Systems. Sensors 2019, 19, 3071. [Google Scholar] [CrossRef] [PubMed]
- Cui, J.; Yan, B.K.; Dong, X.F.; Zhang, S.M.; Zhang, J.F.; Tian, F.; Wang, R.S. Temperature and emissivity separation and mineral mapping based on airborne TASI hyperspectral thermal infrared data. Int. J. Appl. Earth Obs. Geoinf. 2015, 40, 19–28. [Google Scholar] [CrossRef]
- Kruse, F.A.; Bedell, R.L.; Taranik, J.V.; Peppin, W.A.; Weatherbee, O.; Calvin, W.M. Mapping alteration minerals at prospect, outcrop and drill core scales using imaging spectrometry. Int. J. Remote Sens. 2012, 33, 1780–1798. [Google Scholar] [CrossRef] [PubMed]
- Zou, J.P.; Zhang, S.; Dong, W.T.; Zhang, H.L. Application of Hyperspectral Image to Detect the Content of Total Nitrogen in Fish Meat Volatile Base. Spectrosc. Spectr. Anal. 2021, 41, 2586–2590. [Google Scholar] [CrossRef]
- Lee, A.; Park, S.; Yoo, J.; Kang, J.S.; Lim, J.; Seo, Y.; Kim, B.; Kim, G. Detecting Bacterial Biofilms Using Fluorescence Hyperspectral Imaging and Various Discriminant Analyses. Sensors 2021, 21, 2213. [Google Scholar] [CrossRef]
- Cho, H.; Lee, H.; Kim, S.; Kim, D.; Lefcourt, A.M.; Chan, D.E.; Chung, S.H.; Kim, M.S. Potential Application of Fluorescence Imaging for Assessing Fecal Contamination of Soil and Compost Maturity. Appl. Sci. 2016, 6, 243. [Google Scholar] [CrossRef]
- Paoletti, M.E.; Haut, J.M.; Fernandez-Beltran, R.; Plaza, J.; Plaza, A.; Li, J.; Pla, F. Capsule Networks for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2019, 57, 2145–2160. [Google Scholar] [CrossRef]
- Rasti, B.; Scheunders, P.; Ghamisi, P.; Licciardi, G.; Chanussot, J. Noise Reduction in Hyperspectral Imagery: Overview and Application. Remote Sens. 2018, 10, 482. [Google Scholar] [CrossRef]
- Zhang, B. Advancement of hyperspectral image processing and information extraction. J. Remote Sens. 2016, 20, 1062–1090. [Google Scholar] [CrossRef]
- Lu, X.; Wang, Y.; Yuan, Y. Graph-Regularized Low-Rank Representation for Destriping of Hyperspectral Images. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4009–4018. [Google Scholar] [CrossRef]
- Yan, L.; Zhu, R.; Liu, Y.; Mo, N. Scene Capture and Selected Codebook-Based Refined Fuzzy Classification of Large High-Resolution Images. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4178–4192. [Google Scholar] [CrossRef]
- Zheng, M.; Qi, G.; Zhu, Z.; Li, Y.; Wei, H.; Liu, Y. Image Dehazing by an Artificial Image Fusion Method Based on Adaptive Structure Decomposition. IEEE Sens. J. 2020, 20, 8062–8072. [Google Scholar] [CrossRef]
- Zhu, Z.; Wei, H.; Hu, G.; Li, Y.; Qi, G.; Mazur, N. A Novel Fast Single Image Dehazing Algorithm Based on Artificial Multiexposure Image Fusion. IEEE Trans. Instrum. Meas. 2021, 70, 5001523. [Google Scholar] [CrossRef]
- Yuan, Q.; Zhang, L.; Shen, H. Hyperspectral Image Denoising Employing a Spectral-Spatial Adaptive Total Variation Model. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3660–3677. [Google Scholar] [CrossRef]
- Maggioni, M.; Katkovnik, V.; Egiazarian, K.; Foi, A. Nonlocal transform-domain filter for volumetric data denoising and reconstruction. IEEE Trans. Image Process 2013, 22, 119–133. [Google Scholar] [CrossRef] [PubMed]
- Hongyan, Z.; Wei, H.; Liangpei, Z.; Huanfeng, S.; Qiangqiang, Y. Hyperspectral Image Restoration Using Low-Rank Matrix Recovery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4729–4743. [Google Scholar] [CrossRef]
- Kundu, R.; Chakrabarti, A.; Lenka, P. A Novel Technique for Image Denoising using Non-local Means and Genetic Algorithm. Natl. Acad. Sci. Lett. India 2022, 45, 61–67. [Google Scholar] [CrossRef]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.-S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep Learning in Remote Sensing: A Comprehensive Review and List of Resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef]
- Li, K.; Qi, J.; Sun, L. Hyperspectral image denoising based on multi-resolution dense memory network. Multimed. Tools Appl. 2023, 82, 29733–29752. [Google Scholar] [CrossRef]
- Zhuang, L.; Ng, M.K.; Gao, L.; Michalski, J.; Wang, Z. Eigenimage2Eigenimage (E2E): A Self-Supervised Deep Learning Network for Hyperspectral Image Denoising. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–15. [Google Scholar] [CrossRef]
- Xiong, F.; Zhou, J.; Zhou, J.; Lu, J.; Qian, Y. Multitask Sparse Representation Model-Inspired Network for Hyperspectral Image Denoising. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5518515. [Google Scholar] [CrossRef]
- Liu, D.; Wen, B.H.; Jiao, J.B.; Liu, X.M.; Wang, Z.Y.; Huang, T.S. Connecting Image Denoising and High-Level Vision Tasks via Deep Learning. IEEE Trans. Image Process. 2020, 29, 3695–3706. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.H.; Chen, J.; Hoi, S.C.H. Deep Learning for Image Super-Resolution: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 3365–3387. [Google Scholar] [CrossRef]
- Chang, Y.; Yan, L.; Fang, H.; Zhong, S.; Liao, W. HSI-DeNet: Hyperspectral Image Restoration via Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2019, 57, 667–682. [Google Scholar] [CrossRef]
- Yuan, Q.; Zhang, Q.; Li, J.; Shen, H.; Zhang, L. Hyperspectral Image Denoising Employing a Spatial-Spectral Deep Residual Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1205–1218. [Google Scholar] [CrossRef]
- Li, K.; Zhong, F.; Sun, L. Hyperspectral Image Denoising Based on Multi-Resolution Gated Network with Wavelet Transform. In Proceedings of the 2022 3rd International Conference on Computer Vision, Image and Deep Learning & International Conference on Computer Engineering and Applications (CVIDL & ICCEA), Changchun, China, 20–22 May 2022; pp. 637–642. [Google Scholar]
- Dong, W.; Wang, H.; Wu, F.; Shi, G.; Li, X. Deep Spatial–Spectral Representation Learning for Hyperspectral Image Denoising. IEEE Trans. Comput. Imaging 2019, 5, 635–648. [Google Scholar] [CrossRef]
- Buades, A.A.C.B.; Morel, J.-M. A non-local algorithm for image denoising. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 2, pp. 60–65. [Google Scholar] [CrossRef]
- Renard, N.; Bourennane, S.; Blanc-Talon, J. Denoising and Dimensionality Reduction Using Multilinear Tools for Hyperspectral Images. IEEE Geosci. Remote Sens. Lett. 2008, 5, 138–142. [Google Scholar] [CrossRef]
- He, W.; Zhang, H.; Zhang, L.; Shen, H. Total-Variation-Regularized Low-Rank Matrix Factorization for Hyperspectral Image Restoration. IEEE Trans. Geosci. Remote Sens. 2016, 54, 178–188. [Google Scholar] [CrossRef]
- He, W.; Zhang, H.; Zhang, L.; Shen, H. Hyperspectral Image Denoising via Noise-Adjusted Iterative Low-Rank Matrix Approximation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3050–3061. [Google Scholar] [CrossRef]
- Zhang, Q.; Yuan, Q.; Li, J.; Liu, X.; Shen, H.; Zhang, L. Hybrid Noise Removal in Hyperspectral Imagery with a Spatial–Spectral Gradient Network. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7317–7329. [Google Scholar] [CrossRef]
- Liu, Y.-N.; Sun, D.-X.; Hu, X.-N.; Ye, X.; Li, Y.-D.; Liu, S.-F.; Cao, K.-Q.; Chai, M.-Y.; Zhou, W.-Y.-N.; Zhang, J.; et al. The Advanced Hyperspectral Imager Aboard China’s GaoFen-5 satellite. IEEE Geosci. Remote Sens. Mag. 2019, 7, 23–32. [Google Scholar] [CrossRef]
- Zhang, Q.; Zheng, Y.; Yuan, Q.; Song, M.; Yu, H.; Xiao, Y. Hyperspectral Image Denoising: From Model-Driven, Data-Driven, to Model-Data-Driven. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–21. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noisy HSI | LRTA | BM4D | LRTV | LRMR | NAILRMA | SSGN | Our Method | |
|---|---|---|---|---|---|---|---|---|
| Case 1: Gaussian noise | ||||||||
| MPSNR | 23.80 | 28.78 | 29.83 | 26.61 | 35.83 | 37.12 | 35.28 | 36.96 |
| MSSIM | 0.695 | 0.869 | 0.906 | 0.804 | 0.971 | 0.977 | 0.966 | 0.979 |
| MSAM | 20.51 | 13.17 | 10.82 | 7.672 | 5.606 | 4.814 | 6.125 | 4.994 |
| Time/s | - | 11.6 | 258.7 | 177.4 | 45.9 | 80.2 | 11.4 | 17.5 |
| Case 2: Stripe noise | ||||||||
| MPSNR | 20.67 | 21.99 | 21.99 | 28.87 | 28.51 | 21.99 | 40.53 | 44.44 |
| MSSIM | 0.582 | 0.582 | 0.582 | 0.839 | 0.848 | 0.582 | 0.989 | 0.995 |
| MSAM | 13.14 | 13.14 | 13.14 | 3.51 | 6.063 | 13.14 | 1.513 | 1.091 |
| Time/s | - | 5.2 | 225.1 | 184.5 | 49.3 | 29.5 | 11.1 | 14.8 |
| Case 3: Gaussian noise + stripe noise | ||||||||
| MPSNR | 20.65 | 22.09 | 23.67 | 29.90 | 29.73 | 23.14 | 35.58 | 37.07 |
| MSSIM | 0.578 | 0.540 | 0.623 | 0.858 | 0.869 | 0.610 | 0.961 | 0.971 |
| MSAM | 13.314 | 10.963 | 9.782 | 2.602 | 4.584 | 10.096 | 2.14 | 1.817 |
| Time/s | - | 5.1 | 196.4 | 169.7 | 35.5 | 85.8 | 11.4 | 17.4 |
| Case 4: Gaussian noise + deadline noise | ||||||||
| MPSNR | 23.47 | 27.77 | 33.195 | 25.95 | 35.32 | 35.85 | 34.44 | 36.26 |
| MSSIM | 0.684 | 0.840 | 0.950 | 0.776 | 0.970 | 0.972 | 0.960 | 0.974 |
| MSAM | 21.52 | 15.35 | 7.837 | 9.35 | 6.04 | 6.10 | 6.837 | 5.420 |
| Time/s | - | 6.4 | 432.2 | 190.6 | 57.9 | 134.4 | 11.1 | 17.2 |
| Case 5.1: Gaussian noise + stripe noise + deadline noise (SNR = 8 dB) | ||||||||
| MPSNR | 21.60 | 22.69 | 24.17 | 28.11 | 30.32 | 27.62 | 30.01 | 31.47 |
| MSSIM | 0.609 | 0.610 | 0.680 | 0.827 | 0.905 | 0.817 | 0.890 | 0.919 |
| MSAM | 12.26 | 12.24 | 10.96 | 3.63 | 4.84 | 7.14 | 4.513 | 3.387 |
| Time/s | - | 2.3 | 398.8 | 182.4 | 40.1 | 183.6 | 11.2 | 17.4 |
| Case 5.2: Gaussian noise + stripe noise + deadline noise (SNR = 18 dB) | ||||||||
| MPSNR | 24.23 | 24.89 | 25.86 | 27.34 | 31.95 | 30.42 | 38.78 | 40.96 |
| MSSIM | 0.724 | 0.724 | 0.757 | 0.813 | 0.938 | 0.908 | 0.982 | 0.989 |
| MSAM | 11.53 | 11.53 | 10.83 | 4.26 | 4.44 | 5.59 | 1.939 | 1.573 |
| Time/s | - | 2.2 | 405.0 | 168.1 | 37.4 | 133.7 | 11.3 | 17.3 |
| Case 5.3: Gaussian noise + stripe noise + deadline noise (SNR = 28 dB) | ||||||||
| MPSNR | 31.37 | 31.73 | 34.60 | 27.66 | 39.71 | 40.31 | 40.72 | 42.62 |
| MSSIM | 0.927 | 0.928 | 0.957 | 0.816 | 0.985 | 0.988 | 0.987 | 0.991 |
| MSAM | 5.397 | 5.366 | 4.451 | 3.898 | 2.236 | 1.929 | 1.776 | 1.420 |
| Time/s | - | 2.3 | 330.2 | 169.2 | 39.6 | 124.6 | 11.1 | 17.2 |
| Noisy | LRTA | BM4D | LRTV | LRMR | NAILRMA | SSGN | Our Method | |
|---|---|---|---|---|---|---|---|---|
| OA | 73.85% | 73.92% | 79.28% | 76.58% | 82.47% | 80.51% | 83.53% | 90.16% |
| Kappa | 0.703 | 0.704 | 0.764 | 0.731 | 0.8 | 0.778 | 0.813 | 0.889 |
| Baseline | MCB | RB | LF | PSNR | SSIM | SAM |
|---|---|---|---|---|---|---|
| ✓ | ✗ | ✗ | ✗ | 29.96 | 0.887 | 4.713 |
| ✓ | ✓ | ✗ | ✗ | 31.11 | 0.908 | 3.797 |
| ✓ | ✗ | ✓ | ✗ | 30.28 | 0.894 | 4.08 |
| ✓ | ✗ | ✗ | ✓ | 30.39 | 0.897 | 4.066 |
| ✓ | ✓ | ✓ | ✓ | 31.47 | 0.919 | 3.387 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lian, X.; Yin, Z.; Zhao, S.; Li, D.; Lv, S.; Pang, B.; Sun, D. A Neural Network for Hyperspectral Image Denoising by Combining Spatial–Spectral Information. Remote Sens. 2023, 15, 5174. https://doi.org/10.3390/rs15215174
Lian X, Yin Z, Zhao S, Li D, Lv S, Pang B, Sun D. A Neural Network for Hyperspectral Image Denoising by Combining Spatial–Spectral Information. Remote Sensing. 2023; 15(21):5174. https://doi.org/10.3390/rs15215174
Chicago/Turabian StyleLian, Xiaoying, Zhonghai Yin, Siwei Zhao, Dandan Li, Shuai Lv, Boyu Pang, and Dexin Sun. 2023. "A Neural Network for Hyperspectral Image Denoising by Combining Spatial–Spectral Information" Remote Sensing 15, no. 21: 5174. https://doi.org/10.3390/rs15215174
APA StyleLian, X., Yin, Z., Zhao, S., Li, D., Lv, S., Pang, B., & Sun, D. (2023). A Neural Network for Hyperspectral Image Denoising by Combining Spatial–Spectral Information. Remote Sensing, 15(21), 5174. https://doi.org/10.3390/rs15215174