
An Improved Principal Component Analysis Method for the Interpolation of Missing Data in GNSS-Derived PWV Time Series

 , , ,
, , ,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Methods
2.1. Standard PCA
2.2. Modified PCA for Gappy Data
2.2.1. DINEOF
- (1)
- The missing values in the original data matrix are all initialized to zero. Then, a subset of the nonmissing data in the original data matrix is selected through a Monte Carlo simulation and retained in a separate matrix for the purpose of validation in a later stage (i.e., as the reference or truth of the interpolation results). The selected data in the original data matrix are treated as missing data and replaced with zeros.
- (2)
- SVD is used to decompose the above data matrix to obtain eigenvectors and eigenvalues. The eigenvector that possesses the largest eigenvalue is used to reconstruct a new data matrix, on which the above procedure is then applied for the next decomposition and reconstruction process. This iterative process continues until the difference of the root mean square (RMS) values at missing data points between two adjacent iterations falls below a predefined criterion (0.001 is set in this study). Then, the interpolated data are compared with the reference data at those selected reference data points and their differences are used to calculate the RMS.
- (3)
- After the above data matrix is constructed, the number of eigenvectors is changed, and the above process is repeated several times for new RMS values for different numbers of eigenvectors selected. Then, the optimal number of eigenvectors is determined by cross-validation using the minimum RMS of the interpolated value. The interpolated data matrix resulting from the optimal number of eigenvectors that has no gaps can be well determined.
2.2.2. RDPCA
2.3. Effect of Missing Data on PCA
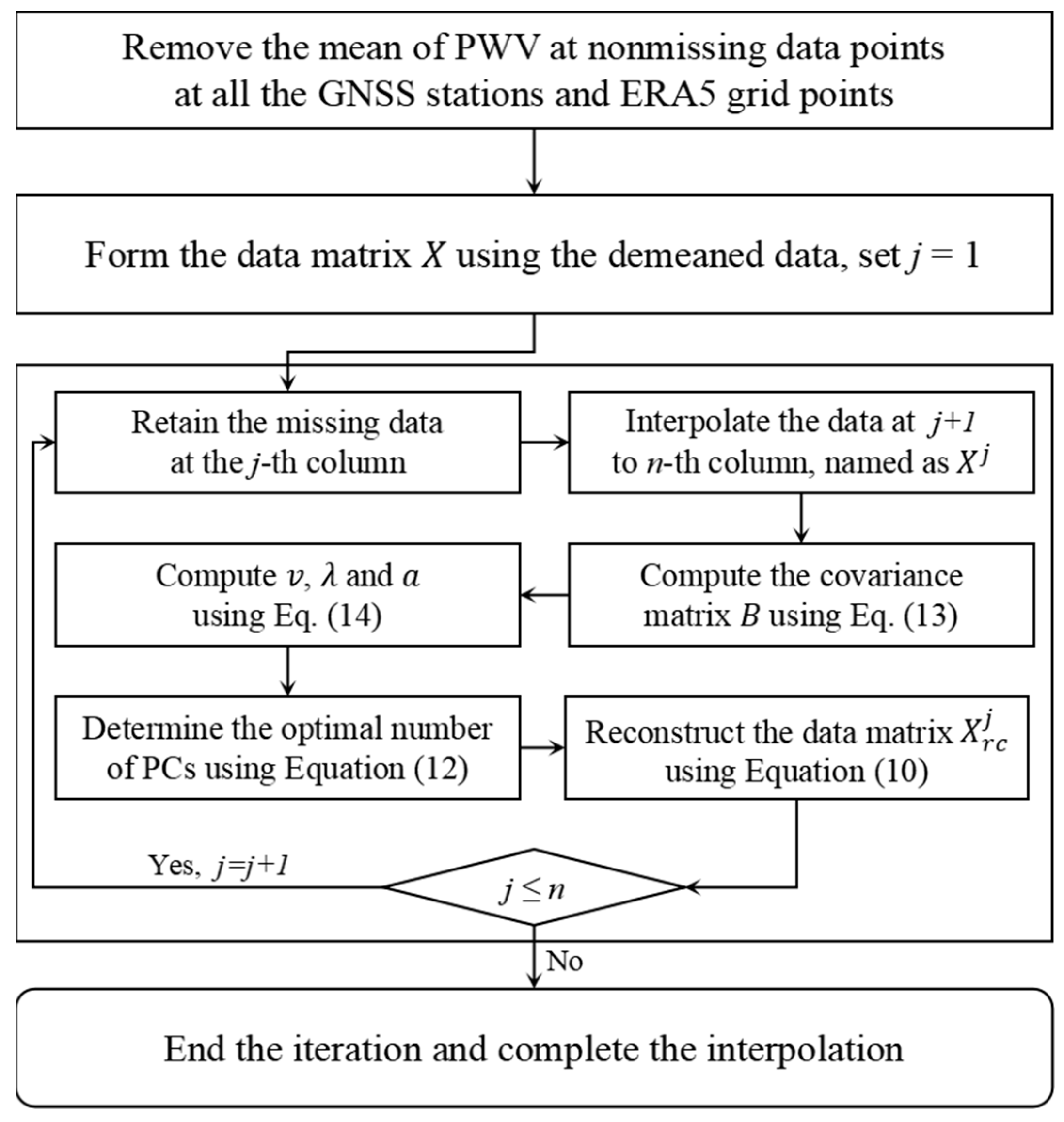
2.4. IRDPCA
- (a)
- Center the gappy data vector of each station by removing the mean value of the available observations from all of the GNSS stations and ERA5 grid points. The centered observation vectors for all of the stations and grid points are used to construct the original data matrix . Set the index of the station to 1, i.e., assign ;
- (b)
- Retain the above missing data at the j-th station in ; use the mean of the PWVs derived from the surrounding reanalysis datasets to interpolate the missing data for the stations from the j + 1-th to n-th stations for their initial data matrix ;
- (c)
- Use Equation (13) to compute the covariance matrix , and use Equation (14) to compute eigenvectors , eigenvalues and PCs ;
- (d)
- Determine an optimal number of PCs based on Equation (12) and the criterion of 99.9%;
- (e)
- Reconstruct data matrix ;
- (f)
- If , go to step (b); otherwise, end the process and use those nonmissing data in the original data matrix to calculate the reconstruction error .
3. Data
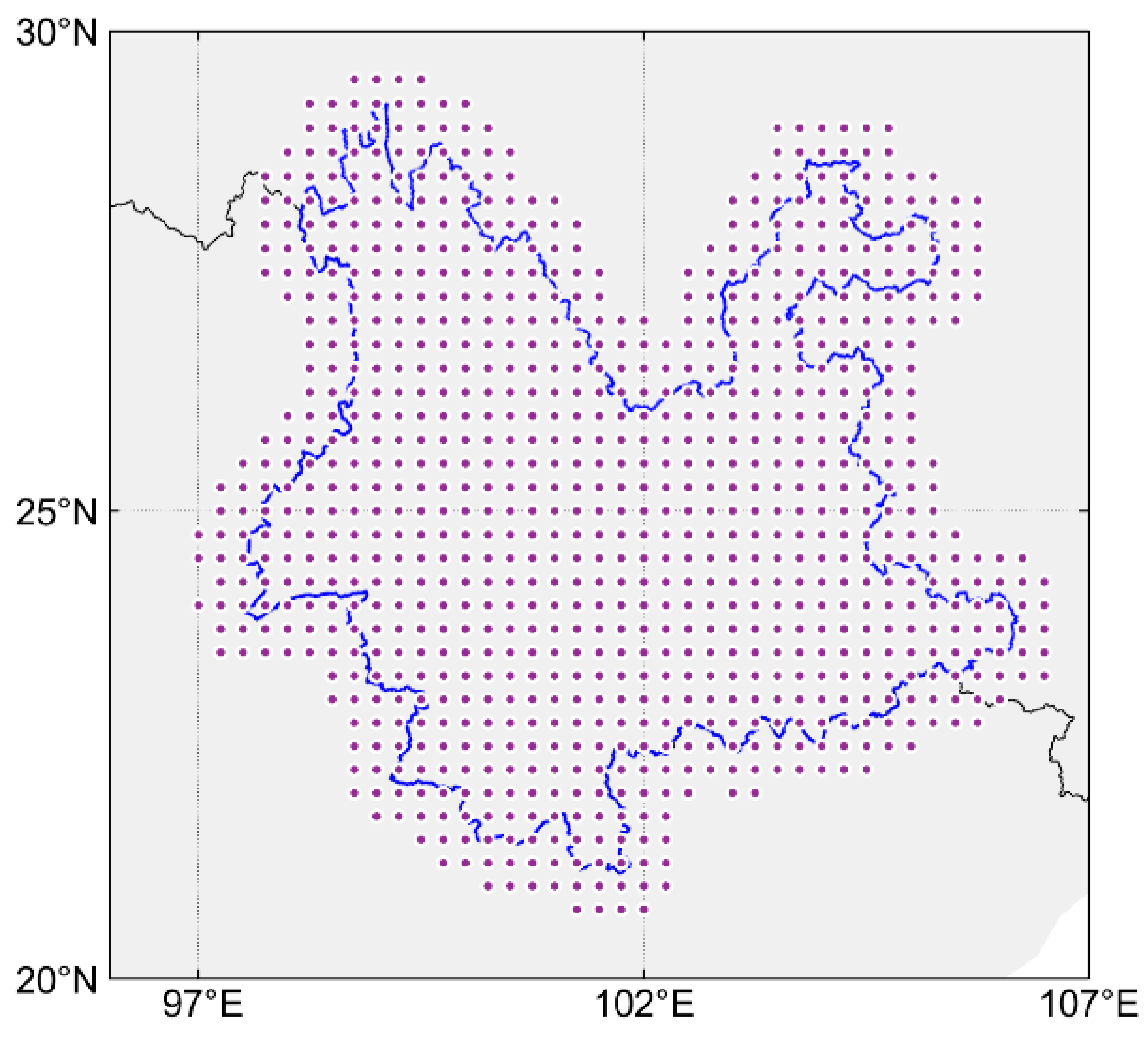
3.1. ERA5 Reanalysis Data
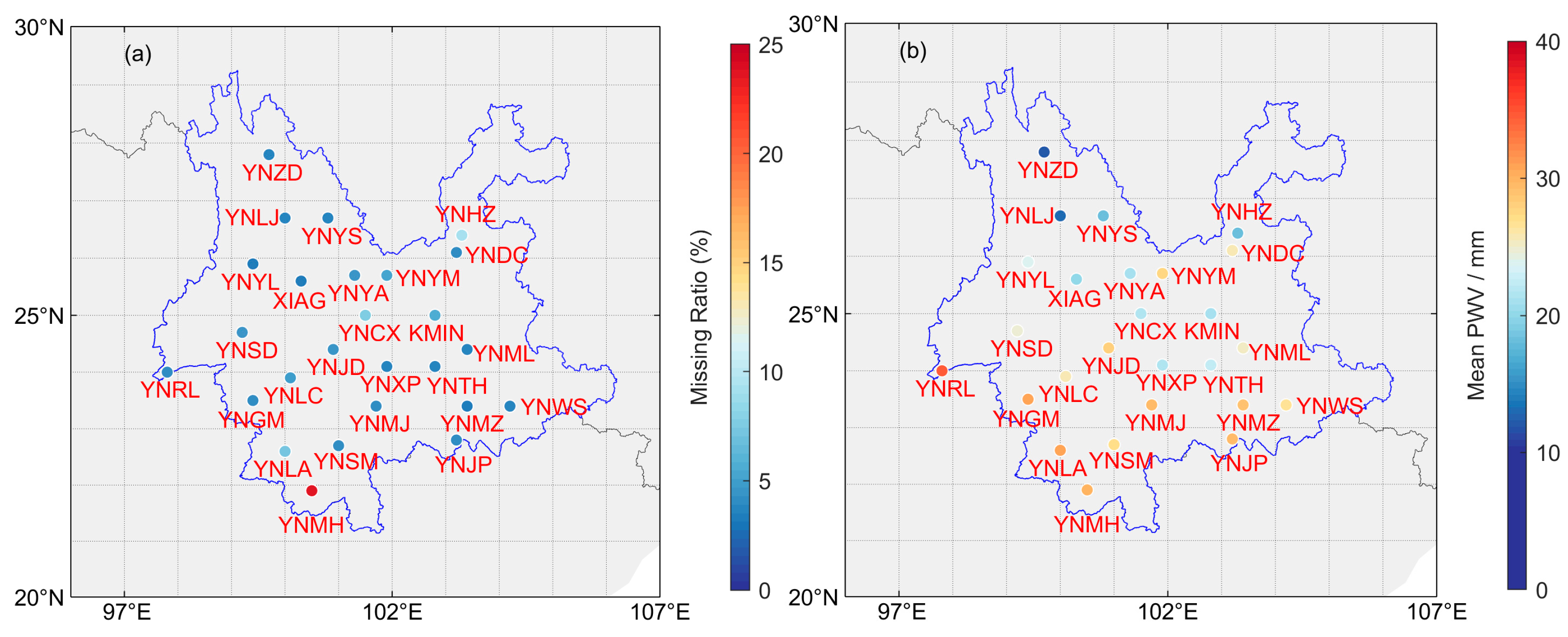
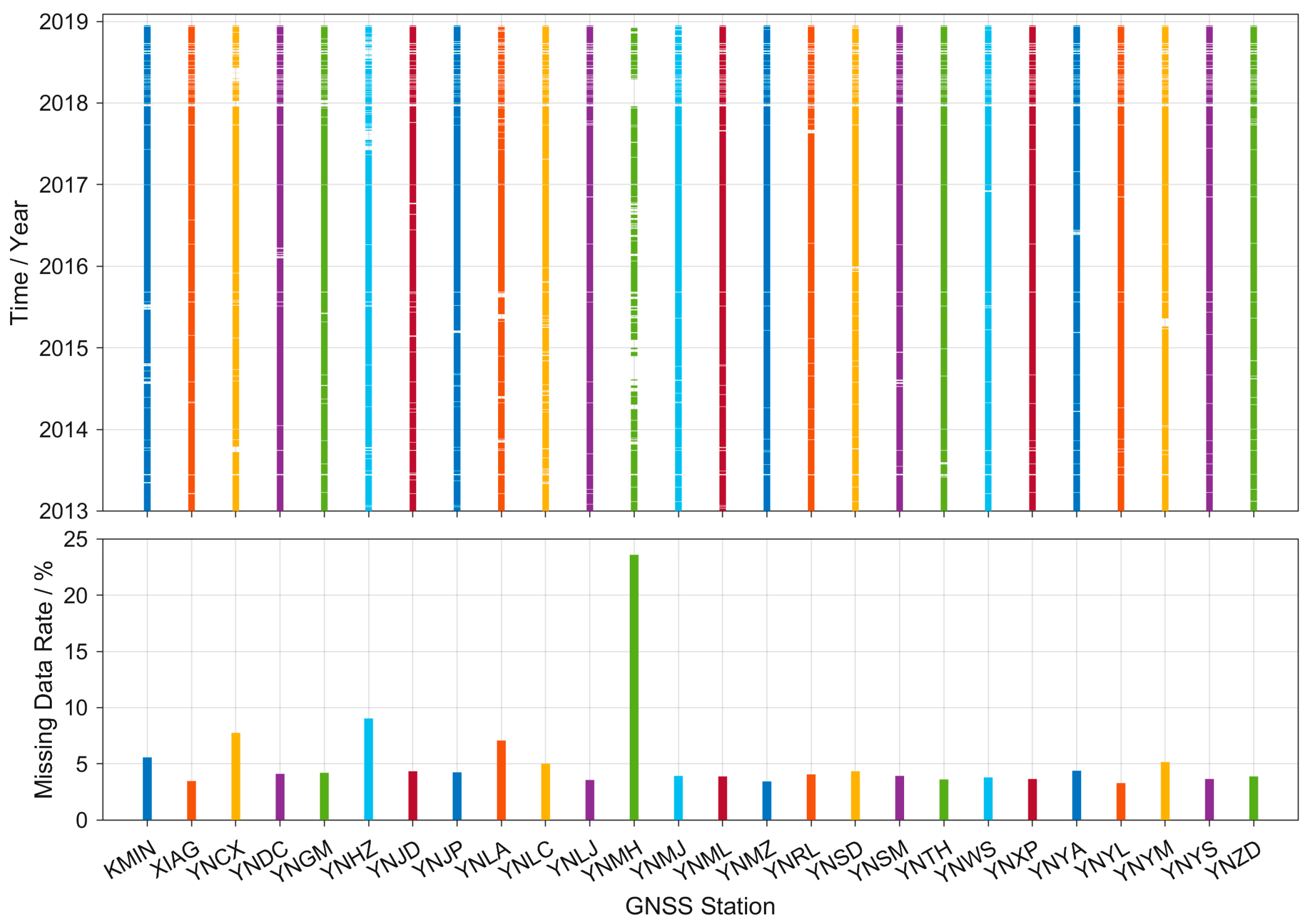
3.2. GNSS Data
4. Results
4.1. Simulation Experiment
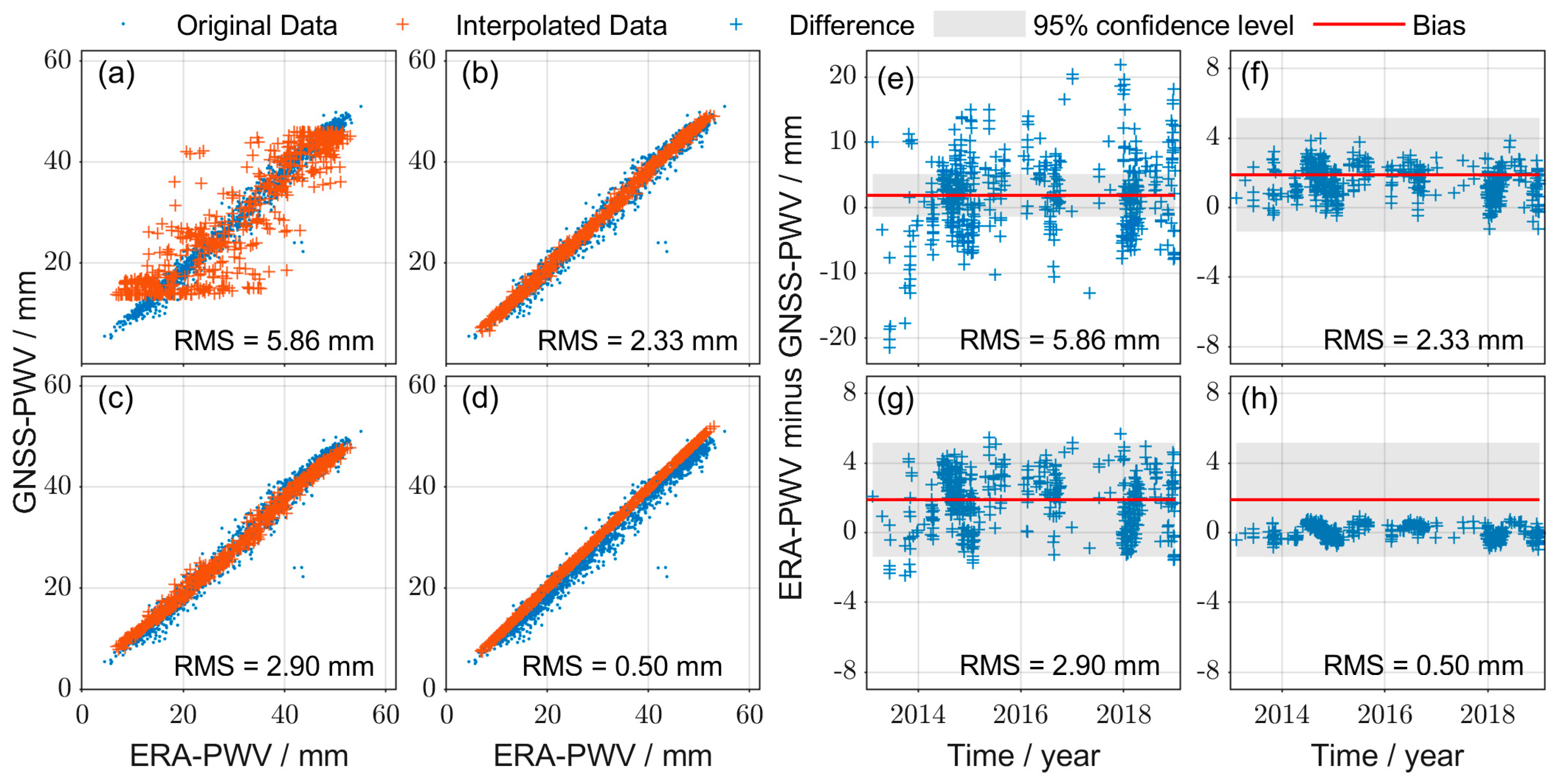
4.1.1. Simulation Using ERA-PWV
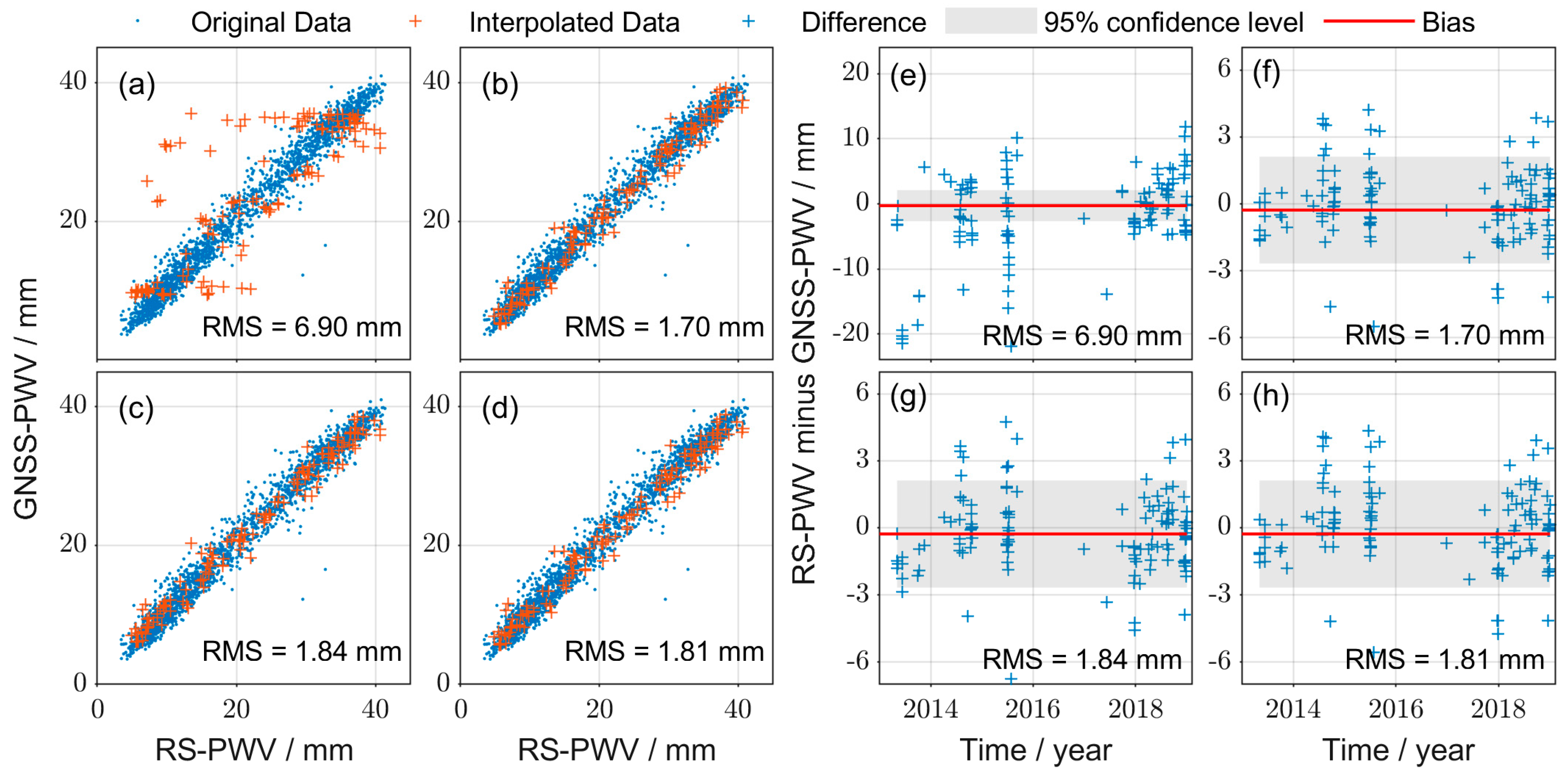
4.1.2. Simulation Using ERA5 and GNSS-PWV
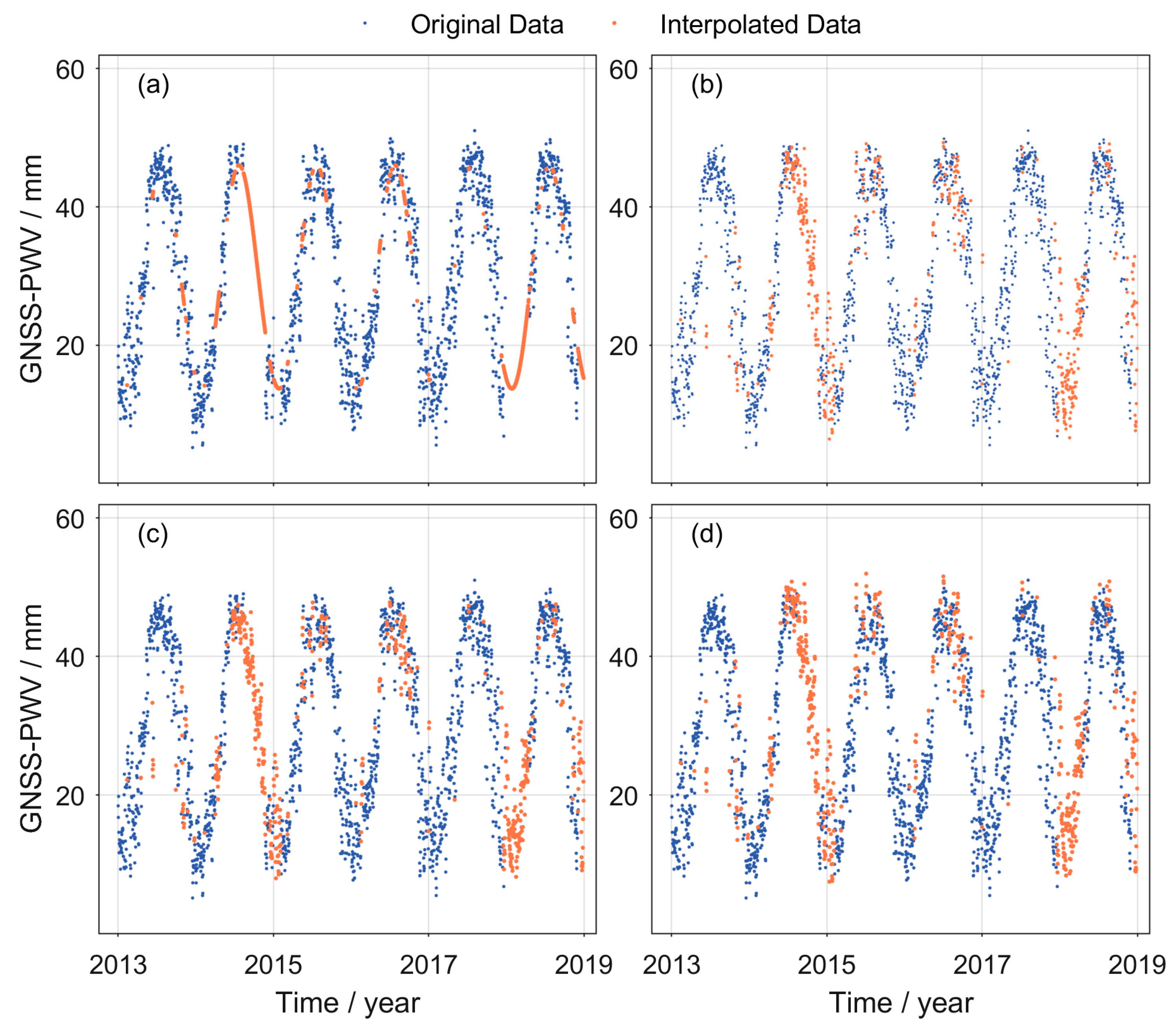
4.2. Interpolation of Real GNSS-PWV Time Series
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dessler, A.E.; Zhang, Z.; Yang, P. Water-vapor climate feedback inferred from climate fluctuations, 2003–2008. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- O’Gorman, P.A.; Muller, C.J. How closely do changes in surface and column water vapor follow Clausius–Clapeyron scaling in climate change simulations? Environ. Res. Lett. 2010, 5, 25207. [Google Scholar] [CrossRef]
- Patel, V.K.; Kuttippurath, J. Increase in Tropospheric Water Vapor Amplifies Global Warming and Climate Change. Ocean.-Land-Atmos. Res. 2023, 2, 15. [Google Scholar] [CrossRef]
- Solomon, S.; Rosenlof, K.H.; Portmann, R.W.; Daniel, J.S.; Davis, S.M.; Sanford, T.J.; Plattner, G. Contributions of Stratospheric Water Vapor to Decadal Changes in the Rate of Global Warming. Science 2010, 327, 1219–1223. [Google Scholar] [CrossRef]
- Antuña-Marrero, J.C.; Román, R.; Cachorro, V.E.; Mateos, D.; Toledano, C.; Calle, A.; Antuña-Sánchez, J.C.; Vaquero-Martínez, J.; Antón, M.; de Frutos Baraja, Á.M. Integrated water vapor over the Arctic: Comparison between radiosondes and sun photometer observations. Atmos. Res. 2022, 270, 106059. [Google Scholar] [CrossRef]
- Tan, J.; Chen, B.; Wang, W.; Yu, W.; Dai, W. Evaluating Precipitable Water Vapor Products from Fengyun-4A Meteorological Satellite Using Radiosonde, GNSS, and ERA5 Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4106512. [Google Scholar] [CrossRef]
- Zhang, W.; Lou, Y.; Cao, Y.; Liang, H.; Shi, C.; Huang, J.; Liu, W.; Zhang, Y.; Fan, B. Corrections of Radiosonde-Based Precipitable Water Using Ground-Based GPS and Applications on Historical Radiosonde Data Over China. J. Geophys. Res. Atmos. 2019, 124, 3208–3222. [Google Scholar] [CrossRef]
- Ma, X.; Yao, Y.; Zhang, B.; Du, Z. FY-3A/MERSI precipitable water vapor reconstruction and calibration using multi-source observation data based on a generalized regression neural network. Atmos. Res. 2022, 265, 105893. [Google Scholar] [CrossRef]
- Ma, X.; Yao, Y.; Zhang, B.; Qin, Y.; Zhang, Q.; Zhu, H. An Improved MODIS NIR PWV Retrieval Algorithm Based on an Artificial Neural Network Considering the Land-Cover Types. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5622412. [Google Scholar] [CrossRef]
- Lindenbergh, R.; Keshin, M.; van der Marel, H.; Hanssen, R. High resolution spatio-temporal water vapour mapping using GPS and MERIS observations. Int. J. Remote Sens. 2008, 29, 2393–2409. [Google Scholar] [CrossRef]
- Zhu, D.; Zhang, K.; Yang, L.; Wu, S.; Li, L. Evaluation and Calibration of MODIS Near-Infrared Precipitable Water Vapor over China Using GNSS Observations and ERA-5 Reanalysis Dataset. Remote Sens. 2021, 13, 2761. [Google Scholar] [CrossRef]
- Zhao, Q.; Du, Z.; Yao, W.; Yao, Y.; Li, Z.; Shi, Y.; Chen, L.; Liao, W. Precipitable water vapor fusion method based on artificial neural network. Adv. Space Res. 2022, 70, 85–95. [Google Scholar] [CrossRef]
- Vaquero-Martínez, J.; Antón, M.; Costa, M.J.; Bortoli, D.; Navas-Guzmán, F.; Alados-Arboledas, L. Microwave radiometer, sun-photometer and GNSS multi-comparison of integrated water vapor in Southwestern Europe. Atmos. Res. 2023, 287, 106698. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. 1992, 97, 15787. [Google Scholar] [CrossRef]
- Hadas, T.; Teferle, F.N.; Kazmierski, K.; Hordyniec, P.; Bosy, J. Optimum stochastic modeling for GNSS tropospheric delay estimation in real-time. Gps Solut. 2017, 21, 1069–1081. [Google Scholar] [CrossRef]
- Sun, P.; Zhang, K.; Wu, S.; Wang, R.; Zhu, D.; Li, L. An investigation of a voxel-based atmospheric pressure and temperature model. Gps Solut. 2023, 27, 56. [Google Scholar] [CrossRef]
- Zhao, Q.; Liu, K.; Zhang, T.; He, L.; Shen, Z.; Xiong, S.; Shi, Y.; Chen, L.; Liao, W. A Global Conversion Factor Model for Mapping Zenith Total Delay onto Precipitable Water. Remote Sens. 2022, 14, 1086. [Google Scholar] [CrossRef]
- Lu, C.; Zhang, Y.; Zheng, Y.; Wu, Z.; Wang, Q. Precipitable water vapor fusion of MODIS and ERA5 based on convolutional neural network. Gps Solut. 2023, 27, 15. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, K.; Wu, S.; Shi, J.; Li, L.; Wu, H.; Liu, S. A new method for tropospheric tomography using GNSS and Fengyun-4A data. Atmos. Res. 2022, 280, 106460. [Google Scholar] [CrossRef]
- Zhao, Q.; Yao, Y.; Yao, W. GPS-based PWV for precipitation forecasting and its application to a typhoon event. J. Atmos. Sol.-Terr. Phys. 2018, 167, 124–133. [Google Scholar] [CrossRef]
- Zhu, L.; Yang, L.; Xu, Y.; Zhang, H.; Wu, Z.; Wang, Z. Independent Validation of Jason-2/3 and HY-2B Microwave Radiometers Using Chinese Coastal GNSS. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Dai, A.; Van Hove, T.; Van Baelen, J. A near-global, 2-hourly data set of atmospheric precipitable water from ground-based GPS measurements. J. Geophys. Res. 2007, 112. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, K.; Wu, S.; Li, Z.; Cheng, Y.; Li, L.; Yuan, H. The correlation between GNSS-derived precipitable water vapor and sea surface temperature and its responses to El Niño–Southern Oscillation. Remote Sens. Environ. 2018, 216, 1–12. [Google Scholar] [CrossRef]
- Alshawaf, F.; Zus, F.; Balidakis, K.; Deng, Z.; Hoseini, M.; Dick, G.; Wickert, J. On the Statistical Significance of Climatic Trends Estimated from GPS Tropospheric Time Series. J. Geophys. Res. Atmos. 2018, 123, 10967–10990. [Google Scholar] [CrossRef]
- Yang, F.; Guo, J.; Meng, X.; Shi, J.; Zhou, L. Establishment and Assessment of a New GNSS Precipitable Water Vapor Interpolation Scheme Based on the GPT2w Model. Remote Sens. 2019, 11, 1127. [Google Scholar] [CrossRef]
- Alshawaf, F.; Fersch, B.; Hinz, S.; Kunstmann, H.; Mayer, M.; Meyer, F.J. Water vapor mapping by fusing InSAR and GNSS remote sensing data and atmospheric simulations. Hydrol. Earth Syst. Sci. 2015, 19, 4747–4764. [Google Scholar] [CrossRef]
- Xu, W.B.; Li, Z.W.; Ding, X.L.; Zhu, J.J. Interpolating atmospheric water vapor delay by incorporating terrain elevation information. J. Geod. 2011, 85, 555–564. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Shum, H.Y.; Ikeuchi, K.; Reddy, R. Principal component analysis with missing data and its application to polyhedral object modeling. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 854–867. [Google Scholar] [CrossRef]
- Beckers, J.M.; Rixen, M. EOF calculations and data filling from incomplete oceanographic datasets. J. Atmos. Ocean. Technol. 2003, 20, 1839–1856. [Google Scholar] [CrossRef]
- Taylor, M.H.; Losch, M.; Wenzel, M.; Schröter, J. On the Sensitivity of Field Reconstruction and Prediction Using Empirical Orthogonal Functions Derived from Gappy Data. J. Clim. 2013, 26, 9194–9205. [Google Scholar] [CrossRef]
- Ping, B.; Su, F.; Meng, Y. Reconstruction of Satellite-Derived Sea Surface Temperature Data Based on an Improved DINEOF Algorithm. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 4181–4188. [Google Scholar] [CrossRef]
- Shen, Y.; Peng, F.; Li, B. Improved singular spectrum analysis for time series with missing data. Nonlinear Process Geophys. 2015, 22, 371–376. [Google Scholar] [CrossRef]
- Shen, Y.; Li, W.; Xu, G.; Li, B. Spatiotemporal filtering of regional GNSS network’s position time series with missing data using principle component analysis. J. Geod. 2014, 88, 1–12. [Google Scholar] [CrossRef]
- He, X.; Yu, K.; Montillet, J.; Xiong, C.; Lu, T.; Zhou, S.; Ma, X.; Cui, H.; Ming, F. GNSS-TS-NRS: An Open-Source MATLAB-Based GNSS Time Series Noise Reduction Software. Remote Sens. 2020, 12, 3532. [Google Scholar] [CrossRef]
- He, X.; Hua, X.; Yu, K.; Xuan, W.; Lu, T.; Zhang, W.; Chen, X. Accuracy enhancement of GPS time series using principal component analysis and block spatial filtering. Adv. Space Res. 2015, 55, 1316–1327. [Google Scholar] [CrossRef]
- Dong, D.; Fang, P.; Bock, Y.; Webb, F.; Prawirodirdjo, L.; Kedar, S.; Jamason, P. Spatiotemporal filtering using principal component analysis and Karhunen-Loeve expansion approaches for regional GPS network analysis. J. Geophys. Res. Solid Earth 2006, 111. [Google Scholar] [CrossRef]
- Serneels, S.; Verdonck, T. Principal component analysis for data containing outliers and missing elements. Comput. Stat. Data Anal. 2008, 52, 1712–1727. [Google Scholar] [CrossRef]
- Alvera-Azcárate, A.; Barth, A.; Rixen, M.; Beckers, J.M. Reconstruction of incomplete oceanographic data sets using empirical orthogonal functions: Application to the Adriatic Sea surface temperature. Ocean. Model. 2005, 9, 325–346. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric Correction for the Troposphere and Stratosphere in Radio Ranging Satellites. In The Use of Artificial Satellites for Geodesy; Wiley Online Library: Hoboken, NJ, USA, 2013; Volume 15, pp. 247–251. [Google Scholar] [CrossRef]
- Zhu, D.; Zhang, K.; Sun, P.; Wu, S.; Wan, M. Homogenization of daily precipitable water vapor time series derived from GNSS observations over China. Adv. Space Res. 2023, 72, 1751–1763. [Google Scholar] [CrossRef]
- Zhu, D.; Zhang, K.; Shen, Z.; Wu, S.; Liu, Z.; Tong, L. A New Adaptive Absolute Method for Homogenizing GNSS-Derived Precipitable Water Vapor Time Series. Earth Space Sci. 2021, 8, e2021EA001716. [Google Scholar] [CrossRef]
- Bock, O.; Bosser, P.; Mears, C. An improved vertical correction method for the inter-comparison and inter-validation of integrated water vapour measurements. Atmos. Meas. Tech. 2022, 15, 5643–5665. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, D.; Zhong, Z.; Zhang, M.; Wu, S.; Zhang, K.; Li, Z.; Hu, Q.; Liu, X.; Liu, J. An Improved Principal Component Analysis Method for the Interpolation of Missing Data in GNSS-Derived PWV Time Series. Remote Sens. 2023, 15, 5153. https://doi.org/10.3390/rs15215153
Zhu D, Zhong Z, Zhang M, Wu S, Zhang K, Li Z, Hu Q, Liu X, Liu J. An Improved Principal Component Analysis Method for the Interpolation of Missing Data in GNSS-Derived PWV Time Series. Remote Sensing. 2023; 15(21):5153. https://doi.org/10.3390/rs15215153
Chicago/Turabian StyleZhu, Dantong, Zhenhao Zhong, Minghao Zhang, Suqin Wu, Kefei Zhang, Zhen Li, Qingfeng Hu, Xianlin Liu, and Junguo Liu. 2023. "An Improved Principal Component Analysis Method for the Interpolation of Missing Data in GNSS-Derived PWV Time Series" Remote Sensing 15, no. 21: 5153. https://doi.org/10.3390/rs15215153
APA StyleZhu, D., Zhong, Z., Zhang, M., Wu, S., Zhang, K., Li, Z., Hu, Q., Liu, X., & Liu, J. (2023). An Improved Principal Component Analysis Method for the Interpolation of Missing Data in GNSS-Derived PWV Time Series. Remote Sensing, 15(21), 5153. https://doi.org/10.3390/rs15215153