1. Introduction
Over the last 50 years, scientists have utilized the Earth’s naturally occurring upwelling microwave emission for studying and monitoring the Earth’s surface and atmosphere [
1]. Providing information on sea ice, ocean winds and temperature, atmospheric moisture, and soil and vegetation cover, the microwave spectrum is unique and vital to understanding the Earth. The degree of microwave emission depends on the conditions of the emitting medium. For example, sea ice typically has high emissivity with some dependence surface conditions, whereas the ocean reflects microwave radiation and has low microwave emissivity. Winds over the ocean increase its surface roughness and mix microwave polarizations [
2]. Over land, the emissivity signal increases under vegetated land or dry soil conditions [
3,
4]. However, bare wet soil or flooding events reflect microwave radiation and decrease emissivity [
5,
6]. Combined, these effects produce unique spectral/polarimetric signatures that can be related to the type of Earth scene being viewed.
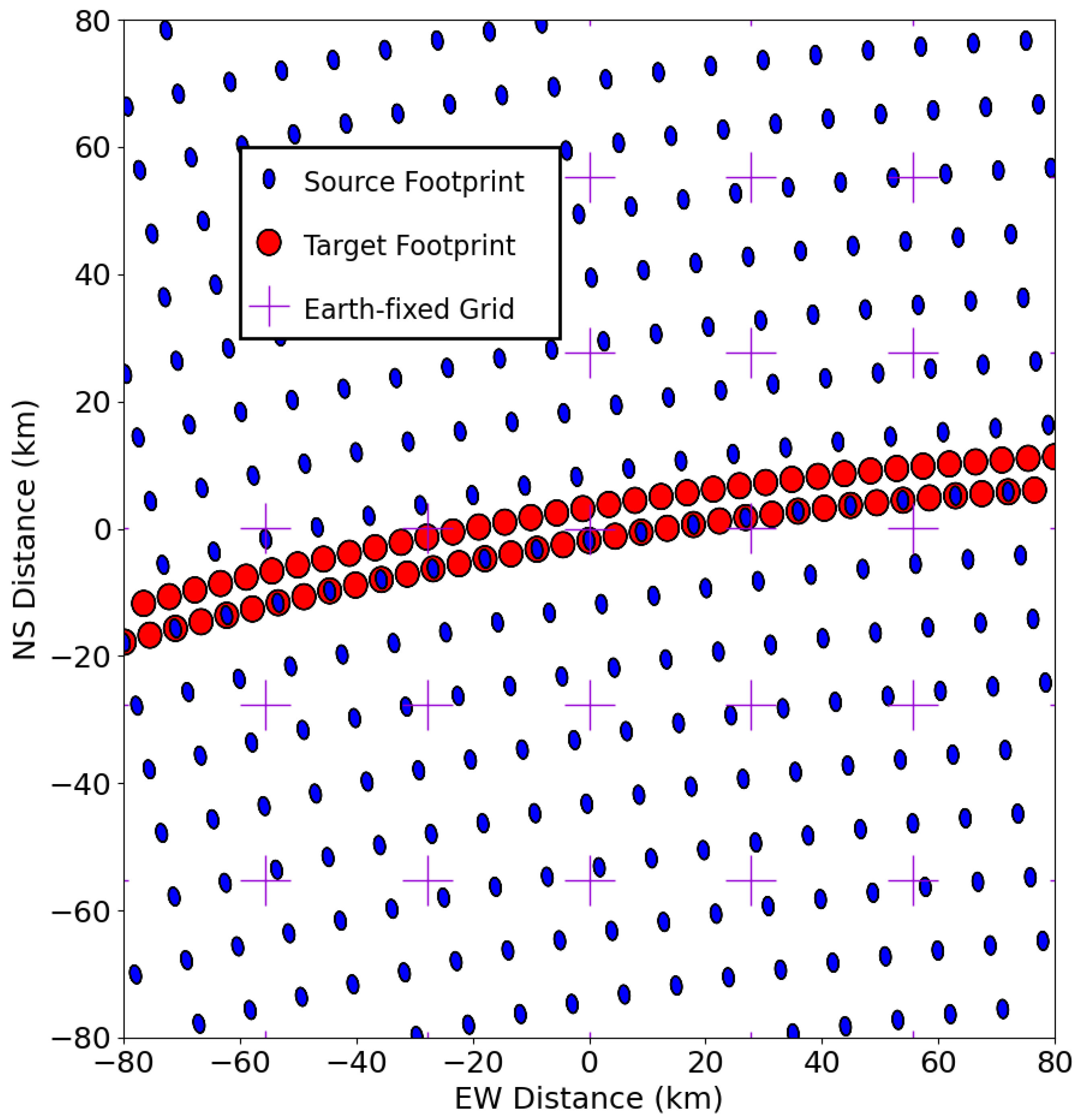
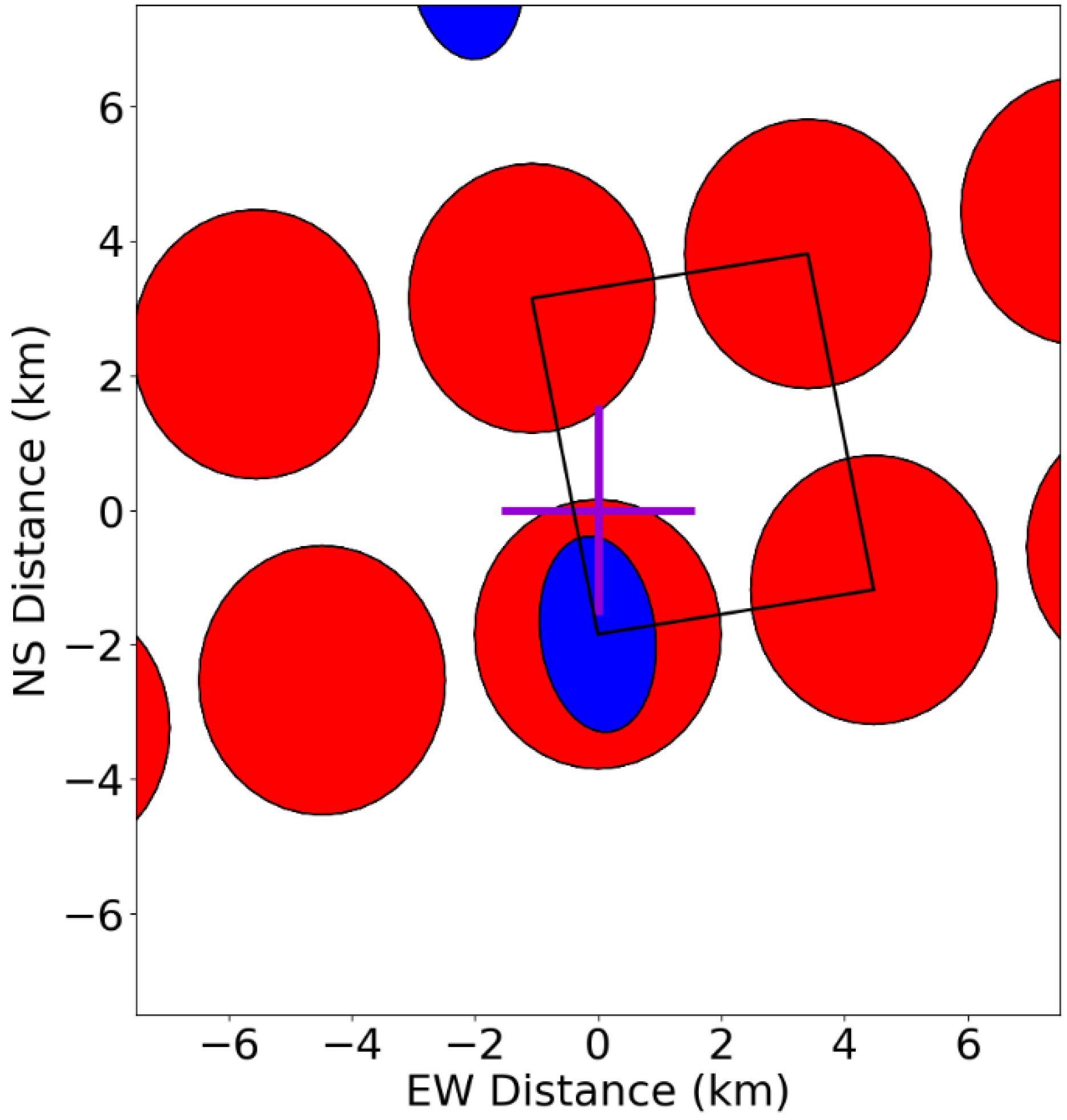
Many of the passive microwave sensors that monitor these natural emissions are conical scanners, which operate using an off-axis paraboloid antenna spinning around an Earth-directed axis. As a result, individual measurements are arranged in curved “scans” on the Earth (e.g., the blue ellipses in
Figure 1). The area sampled as the satellite moves forward while orbiting defines the satellite swath. Subsequent swaths cross the equator at different longitudes as the Earth rotates. Each measurement footprint is generally elliptical, with a major axis that rotates in the Earth-fixed frame as the satellite scans. Taken together, this geometry presents a challenge for users that want to rapidly collocate satellite data with other sources of information, including maps of surface conditions (often available on a regular latitude-longitude grid), information from other satellites (which would have a different, non-aligned scan geometry), output from weather or climate models, or point-like in situ information.
The objective of the work described here is to solve the satellite geometry problem by resampling measurements from the native scan geometry to circular footprints located on a fixed Earth grid. Circular footprints enable accurate comparison between measurements made by sensors on different platforms, whose native footprints are ellipses canted at varying angles. Using a fixed Earth grid facilitates comparisons with other types of Earth system data, such as reanalysis or surface conditions, that are available on fixed grids. In this work, the resampling is performed in four steps.
The three steps use the Backus–Gilbert method [
7,
8], which produces estimates of radiance for an arbitrarily-shaped target footprint at an arbitrary location. This is achieved by resampling using an optimized linear combination of the source footprints. The Backus–Gilbert method is in widespread use in the microwave satellite analysis community, to collocate footprints that differ slightly in location or to match disparate footprint sizes. In most applications, the target footprint is also elliptical, which is a reasonable choice when preserving spatial resolution is desired. The goal of this work is slightly different. We want to enhance the ease of analysis for users and facilitate the use of data from different sensors as well as other data sources. This motivates our choice of Earth-fixed circular footprints.
The first step is to use the Backus–Gilbert method to calculate the weights needed to resample to a dense grid of target locations in the satellite’s scan geometry. Second, we find the locations on the grid of target locations that surround the desired Earth-fixed grid location. Third, the we use the pre-computed weights to resample the observed radiances to these locations. Finally, we use quadrilateral interpolation to interpolate these resampled radiances to the desired location on the Earth-fixed grid. As we show in
Section 3 below, the interpolation procedure only results in small footprint shape distortions. This is because the interpolation is performed over distances that are less typically less than 10% of the target footprint diameter.
The choice to resample to locations in the satellite geometry as opposed to directly resampling to locations on a fixed grid is driven by computational efficiency. As discussed in more detail below, resampling to an arbitrary location requires the calculation of overlap integrals between the source and target footprints, followed by the diagonalization of moderately-sized matrices. These steps are too computationally intensive (each calculation of the resampling weights takes ~109) floating point operations) to perform for each individual target location and swath geometry in an Earth-fixed coordinated system. By performing Backus–Gilbert calculations in the swath coordinate system, the weights can be pre-computed, reducing the number of floating point operations needed to ~103).
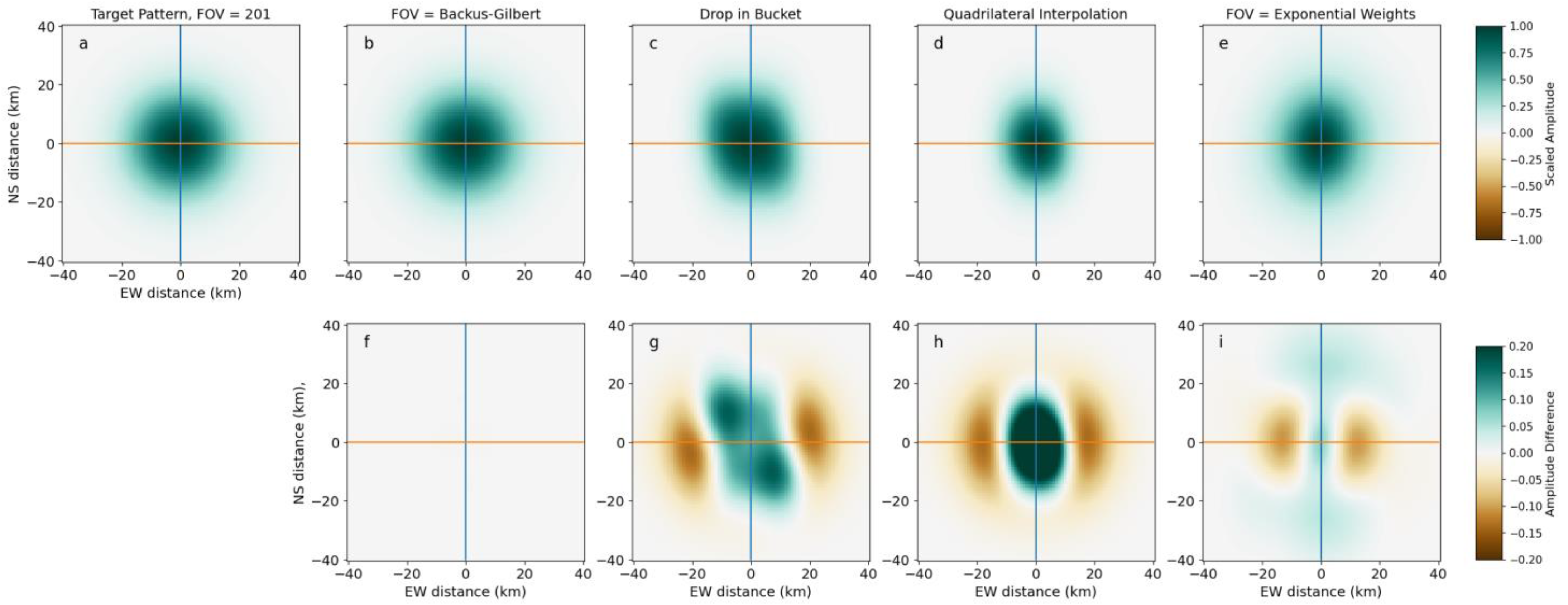
Many scientists have produced Earth-fixed datasets (either radiances or retrieved geophysical parameters) from microwave imagers. These are commonly produced using methods that result in footprint shape distortions or mislocations. For example, the 0.25 × 0.25 degree ocean parameter retrievals currently available from remote sensing systems are constructed using “drop in the bucket” averaging, where all footprints with centers located in the target grid cell are averaged together with equal weights. In
Appendix A, we compare the results from the method described below with results obtained using less accurate methods.
The remainder of this paper is organized as follows: in
Section 2, we describe our methodology in more detail. In
Section 3, we show the results, including accuracy estimates for several types of Earth scenes, and resampled radiances from the Advanced Microwave Scanning Radiometer-2 (AMSR2). In
Section 4, we conclude by discussing the practical limitations of our method when used to resample actual satellite measurements. For the remainder of the document, we will refer to microwave radiances as brightness temperatures (TBs) reported in temperature units of Kelvin (K).
3. Results
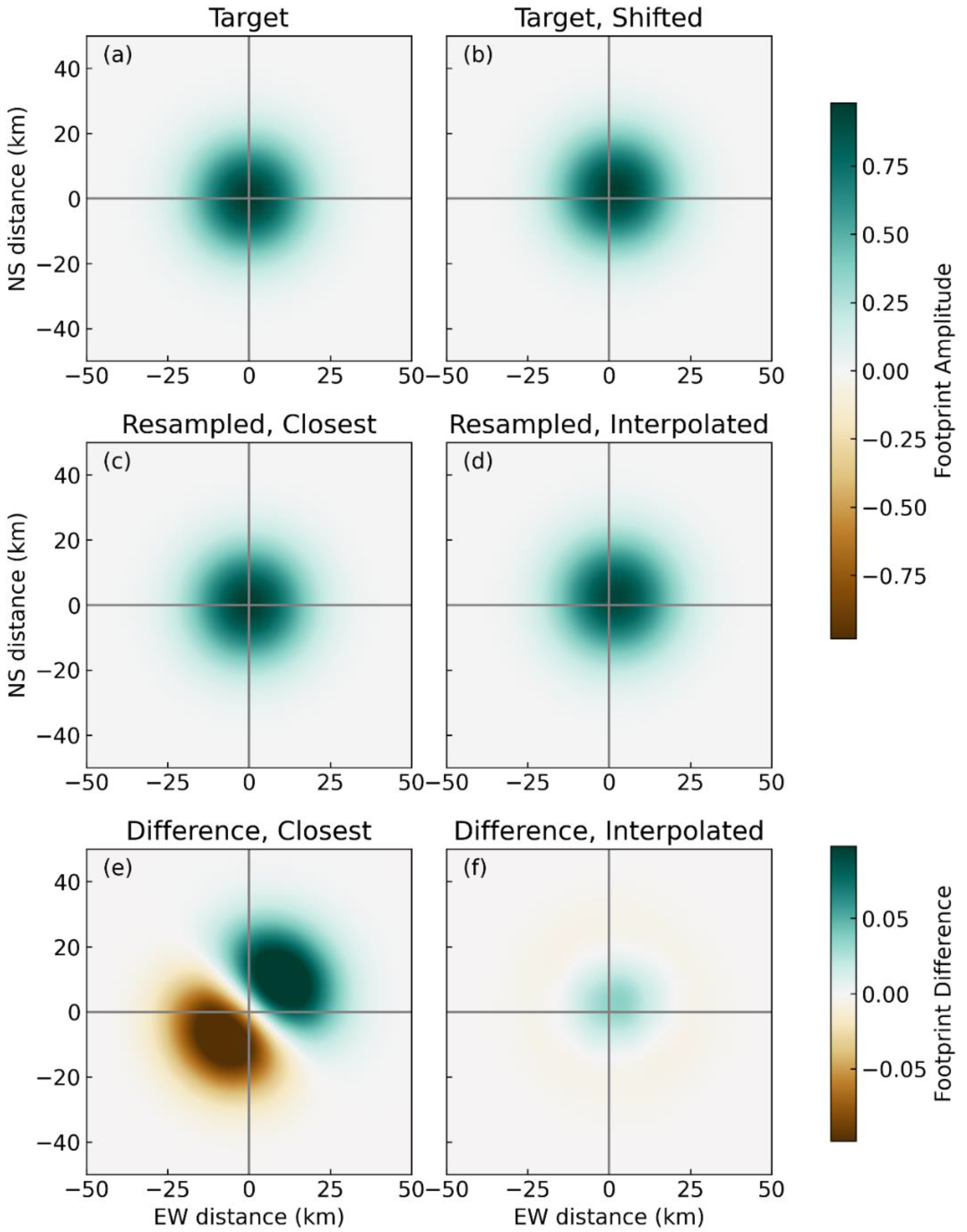
To illustrate the typical results of our methodology, we continue to use the example of AMSR2. It is important to estimate the errors introduced by our method as well as the reduction of the radiometer noise gained by the resampling procedure. We separate the resampling error into two parts: the error due to the difference between the resampled footprint and the ideal target footprint, and the error introduced by the location of the resampled footprint relative to the location of the target as shown in Equation (7).
where
is the amplitude of the resampled footprint at location r,
is the amplitude of the target footprint, and
is the location difference between the target and resampled footprints. Analysis of the location difference term provides motivation for the interpolation step in our method.
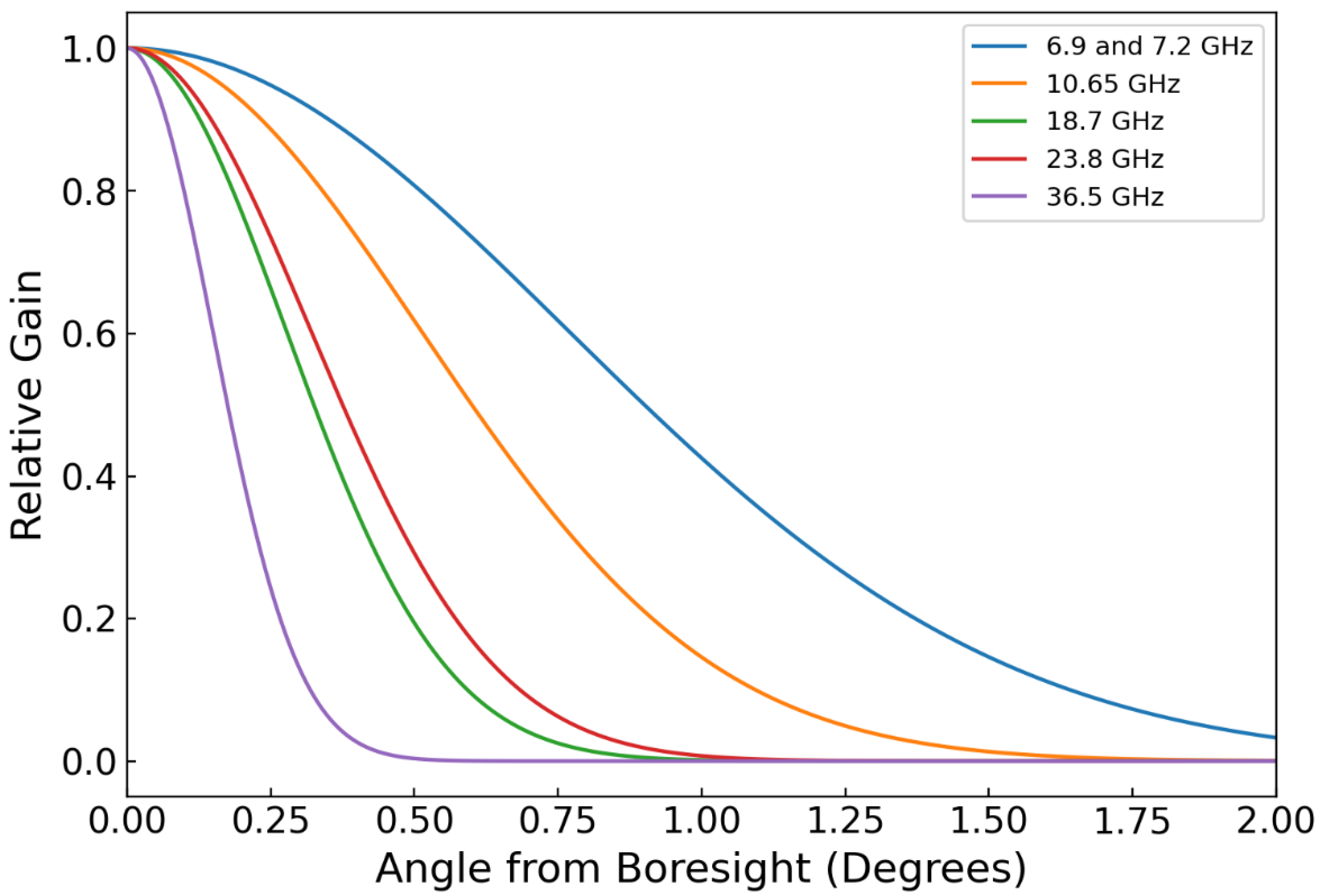
As discussed earlier, the first step is to calculate the Backus–Gilbert weights for each frequency and target footprint. For the source footprints, we start with a simplified, radially symmetric antenna gain function:
The values for the coefficient for each channel and the resulting full-width at half maximum (FWHM) are given in
Table 1. Because the coefficient
b is much smaller than one, these gain functions are very close to a Gaussian. The actual gain functions are not exactly radially symmetric, and have small side-lobes outside of the first zero. Including these in the calculation would add needless complication to our heuristic treatment presented here, but they could be included if they are known with sufficient accuracy. The gain as a function of off-boresight angle is plotted in
Figure 3.
These gain functions are converted to footprints on the Earth’s surface by projecting the gain function onto the surface using a nominal Earth incidence angle of 55 degrees, resulting in footprints that are approximately elliptical Gaussians, with the major axis aligned along the azimuth angle. The resulting footprints are also slightly elongated in the minor-axis direction because of the non-zero integration time for each measurement. The 3-dB size of each footprint on the Earth’s surface is presented in
Table 1. For 10.65 GHz channels and above, we define target functions that are to be circular Gaussian functions with a FWHM diameter of 30 km. For the 6.9 and 7.2 GHz channels, larger target footprints with a diameter of 70 km are required. These are discussed in
Appendix B.
3.1. Examples of Resampled Footprint Shape and Error Estimates
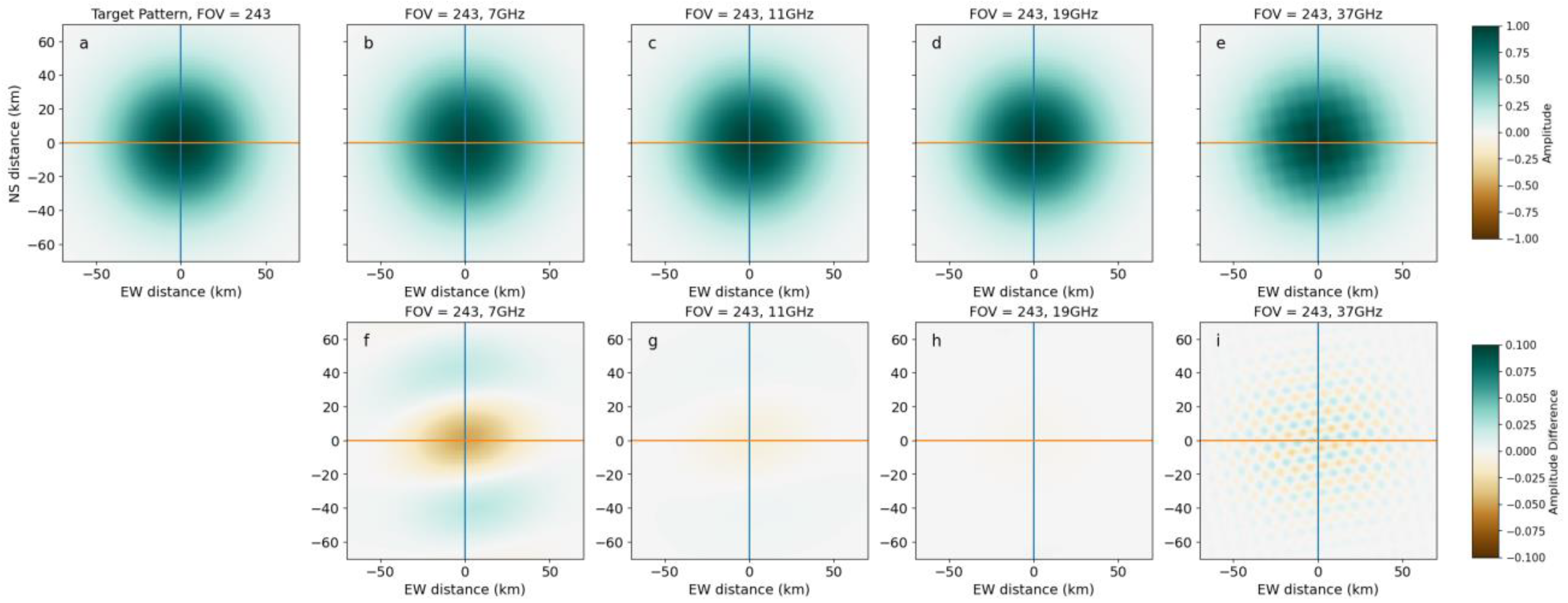
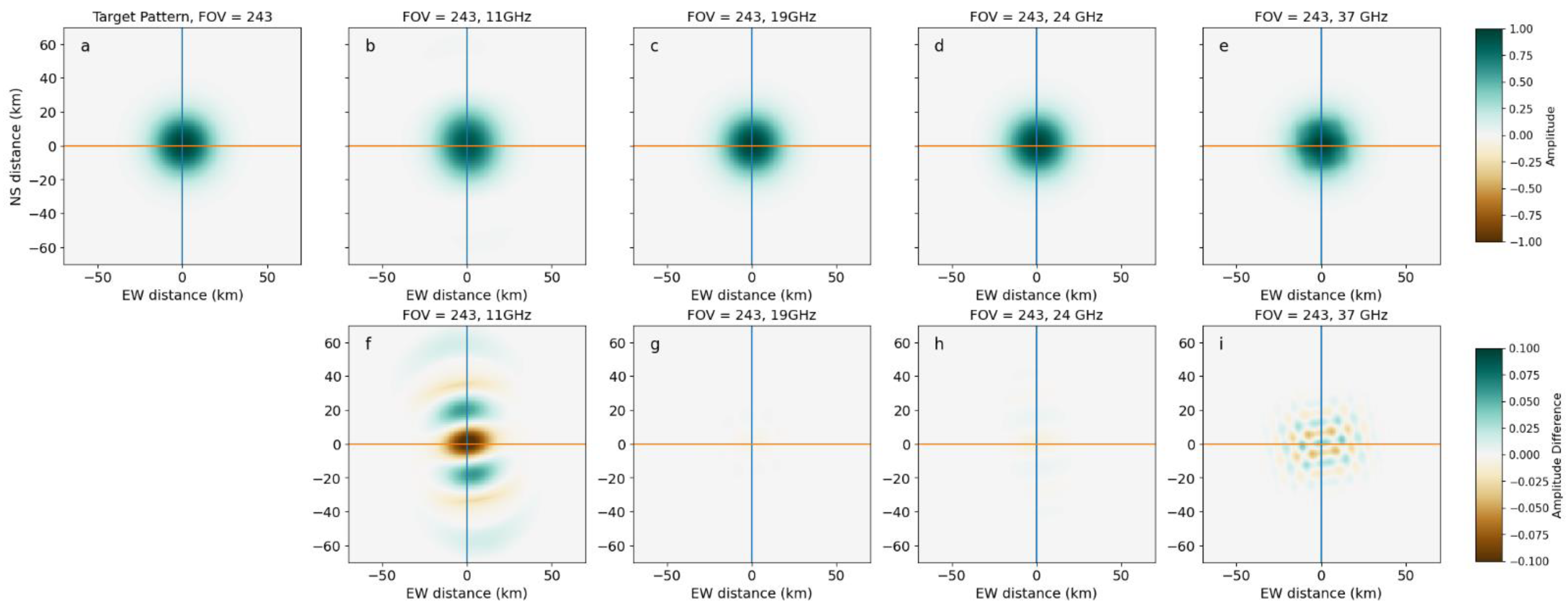
In this section, we show comparisons between the desired target footprints and the resampled footprints for several locations in the swath for the frequencies of interest. In
Figure 4, we provide an example from near the center of the AMSR2 swath with a target diameter of 30 km. The resampled pattern for 19 GHz (c) and 24 GHz (d) are nearly perfect, with the difference between the target and resampled patterns being nearly zero (g and h). At 37 GHz, the source footprints are slightly too small to accurately match the target pattern, resulting in the high-frequency spatial variability seen in (i). For 11 GHz, the major axis of the source pattern (42 km) is larger than the diameter of target pattern, leading to distortions along this axis, as seen in (f). If the observed scene has large gradients along this axis, substantial errors could result (see Figure 7c). Accurate sampling of the 11 GHz channel would require a larger target footprint, but a 30 km resampled product may still be useful for some applications, despite these distortions. Because each of the sampled patterns are a combination of a number of actual observations, the resampling procedure reduces the contributions of random sensor noise. We do not expect further reduction of noise when we perform the final interpolation step, because the noise in neighboring resampled footprints is highly correlated as they are constructed from sets of native observations with many common elements.
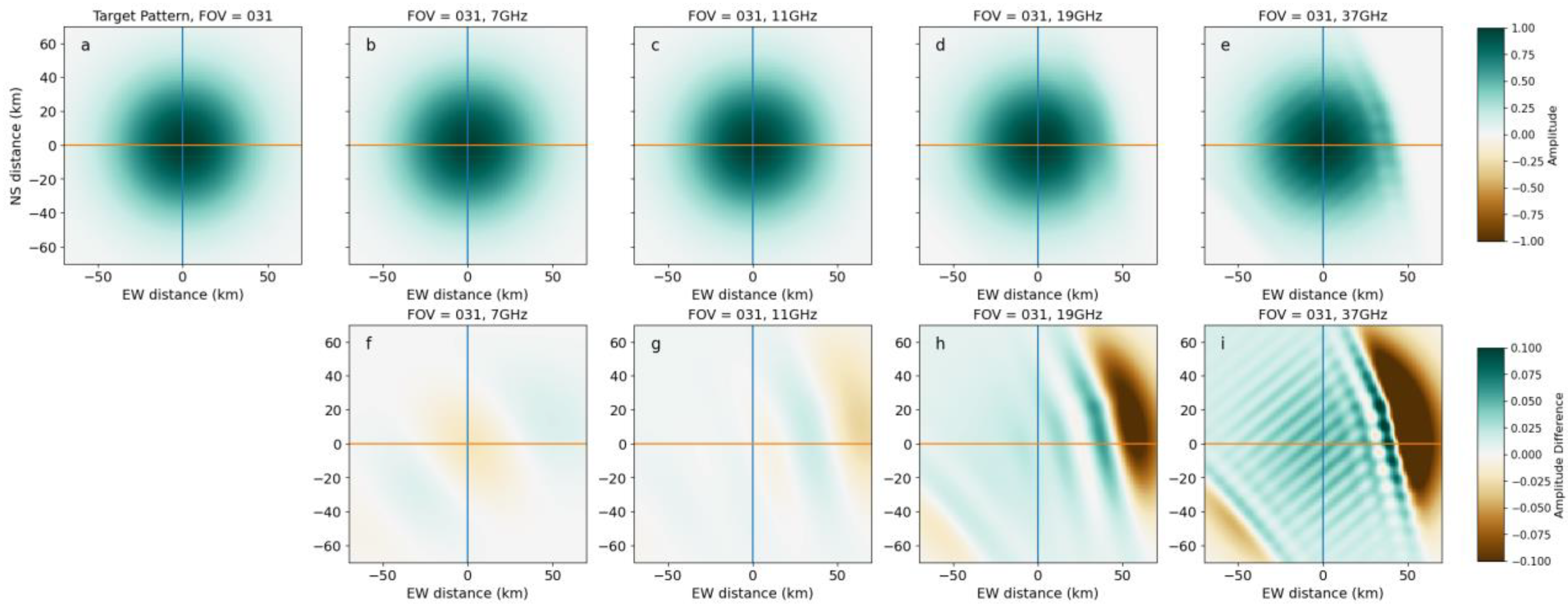
Other locations in the swath show different results. In
Figure 5, we display results analogous to
Figure 4 for a location close to the swath edge. In this case, the results for 37 GHz (e and i) are substantially degraded. Because of the relatively small footprint size for 37 GHz, there is no measurement weight available to provide any weight on the right side of the target footprint, leading to large errors. The other frequencies with their larger footprints, are not substantially degraded until the target footprint is even closer to the swath edge than the example location shown here.
The effect of the differences between the ideal target footprint and the resampled footprints will depend on the scene being viewed. Because we have forced the sum of the
to be 1.0, there will be no error for a scene wherein the radiance is constant, independent of position. As the spatial variability increases, the footprint differences become more important. To demonstrate the dependence of the error on scene properties, we use several idealized versions of real Earth scenes in addition to representative Earth scenes (
Figure 6 and
Figure 7). For microwave frequencies used in microwave imagers, the atmosphere is fairly transparent, and much of the observed radiance is determined by surface properties such as temperature and emissivity. The emissivity difference between dry land and water is typically large, leading to brightness temperature differences as large as 100 K, particularly for horizontally polarized (h-pol) radiation. Therefore, some of the most challenging scenes for microwave imagers are those that mix land and water. Over the open ocean, brightness temperatures are determined by surface wind, sea surface temperature, and atmospheric moisture, which all vary much more smoothly.
We choose to investigate three representative types of Earth scenes as well as two idealized scenes. The Earth scenes are (1) from a location in the Canadian Shield with a large number of lakes, (2) from a simpler land area with some lakes and rivers along the Missouri River, and (3) from a complex coastline along the New England coast (
Figure 6a–c). We also consider two idealized scenes: (1) a linear coastline at randomly chosen angles, and (2) a land fraction gradient, also in random directions (
Figure 6d,e). The land fraction gradient can be considered a proxy for smoothly varying scenes that might be encountered over the rain- and ice-free ocean. In
Figure 6, we show representative land fraction maps from each set of scenes. For Earth-derived scenes, the central latitude and longitude are given in
Table 2. The center of the actual scenes used in our calculations are randomized locations in the regions shown in
Figure 6. These are taken from a box extending ±1 degree in both latitude and longitude from the central location. For the coastline, the scene is rejected if the land fraction averaged over the target footprint is <0.15 or >0.85. This is to prevent contributions from scenes that are not truly coastal scenes. The idealized linear coastline is constructed using a random direction for the orientation of the coastline, and then is displaced randomly ±10 km in both the N-S and E-W directions. These displacements and rotations are added to avoid unrealistic agreements between the target and resampled values because of the symmetry in differences between them. For the gradient scene, the orientation of the gradient is varied randomly. For each type of scene, the difference between the brightness temperature calculated over the target footprint and the resampled footprint is tabulated over 1000 random scenes. We use the root mean square of these differences as an estimated error.
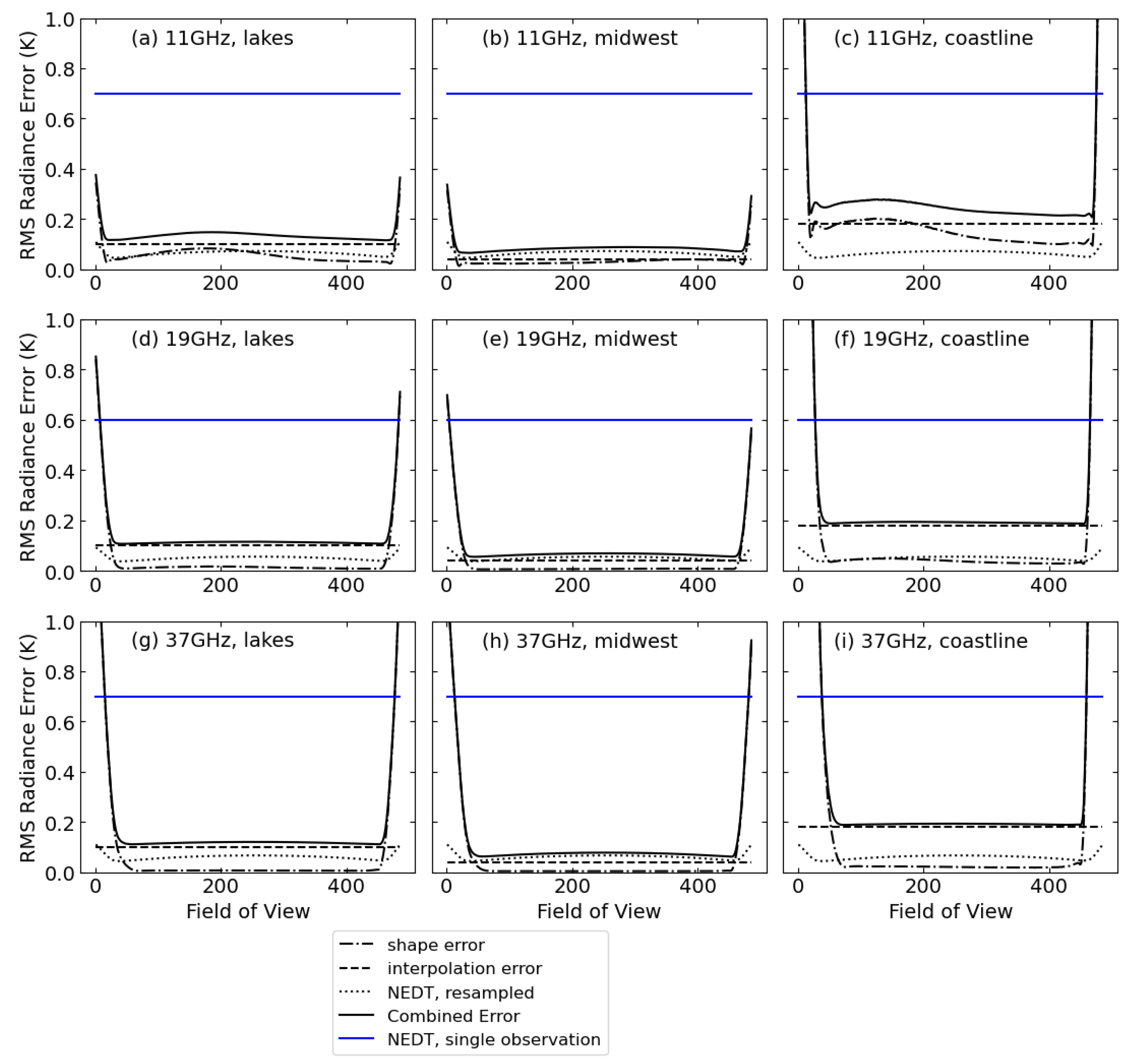
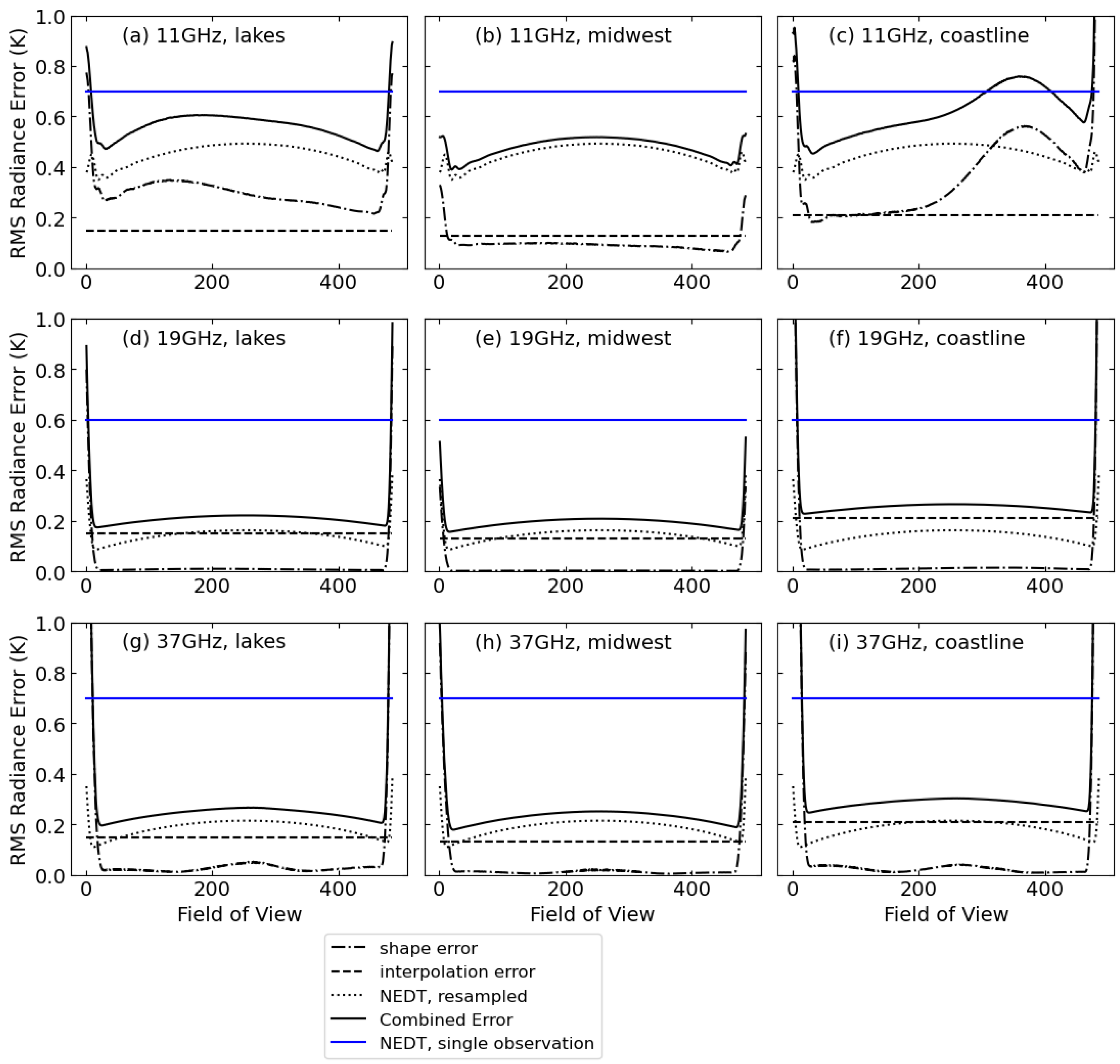
The estimated error for different types of scenes changes as the location in the swath varies (
Figure 7). Near the edges of the swath, the lack of available weight to fill in the edge of the target footprint becomes important, and the estimated errors increase. The errors for the 11 GHz channel are larger, reflecting the large differences between the resampled footprint and the 30 km target footprint. This is especially evident for the coastline scene for the part of the swath where the land–ocean gradient is aligned with the footprint axis. For the 19 and 37 GHz channels, the shape-induced error is much smaller than the errors from radiometer noise, which are typically on the order of tenths of K.
The above analysis was repeated for 70 km footprints. For the larger footprints, we included all AMSR2 frequencies from 6.9 GHz to 37 GHz. The 70 km footprints were the smallest footprints that resulted in adequate performance for the larger 6.9 and 7.2 GHz source footprints. The results of this analysis are presented in
Appendix B.
3.2. Errors Due to Mislocation
The above results show the performance of the method when a resampled footprint is exactly collocated with the target location. In practice, this rarely occurs. A second source of error in resampling is due to the difference between the location of the resampled footprint and the location of the grid-located target. For the number of synthetic footprints used in this example, the typical distance between the target location and the closest resampled footprint is typically in the range of 1 to 3 km. We wish to investigate the estimated error if we use the closest resampled footprint, i.e., if we skip the interpolation step (step 2 in our method). Because the target footprint shapes are fairly well-matched at all frequencies (as least far from the swath edge), this type of error is largely independent of frequency. In
Figure 8, we show the effects of a mislocation error due to a 2.8 km diagonal shift in brightness temperature differences, which is typical of the larger location error in our example geometry. Panel (e) shows the difference between the resampled footprint closest to the target (c) and the shifted target footprint (b). The difference is substantial, and will lead to large errors in scenes with large derivatives in the direction aligned with the mislocation vector. For the example plotted in
Figure 8, a coastline that is oriented southeast to northwest would result in large errors.
We use a simulation similar to that described in
Section 3.2 (
Figure 6 and
Figure 7) to quantify the effects of location errors on both representative and idealized Earth scenes. In this version of the simulation, target footprints are randomly located in the quadrilateral defined by the four adjacent resampled footprints in the along-scan and cross-scan directions. An example of such a quadrilateral is shown in
Figure 2. The top row in
Table 3 shows the root-mean-square (RMS) average of simulated location errors for 1000 simulated target locations. Results are shown for each of the five scene types. In each case, the differences between the randomly located target footprint and the closest resampled footprint were evaluated. The simulated errors for the lakes, coastline, and edge scenes are substantially larger than the typical noise equivalent delta equivalent temperature (NEDT) for satellite-borne imaging radiometers, which range from 0.4–0.7 K.
There are two ways to reduce the mislocation error. First, we could calculate the resampling weights in a finer synthetic grid so that the distance between the resampled and target footprint is reduced. The disadvantage of this approach is that more memory is required to store the resampling weight arrays, which could reduce the portability of the algorithm. A second approach is to use two-dimensional interpolation to locate the target footprint at the desired location, but with a small amount of additional shape mismatch error. The disadvantage of this approach is that it is more computationally expensive, because the resampled radiances need to calculated for the four synthetic footprint locations that encompass the target location. An example of one of these quadrilaterals is shown in
Figure 2. Here, we investigate this second approach, which ultimately forms the basis for “Step 2” in our methodology. We use a quadrilateral interpolation technique that transforms the quadrilateral to a square via a linear transformation. After the transformation, bilinear interpolation can be used. This technique requires that the original quadrilateral to be convex. Fortunately, all quadrilaterals formed by adjacent sets of footprint locations are close to being parallelograms, and thus are convex.
Figure 8f shows the difference between the interpolated footprint and the target footprint. The results are much improved relative to the “closest” result in
Figure 8e. The “bullseye” shape of the difference in
Figure 8f indicates that the resampled footprint is slightly larger than the target footprint due to the interpolation procedure.
The second row of
Table 3 shows the results after the interpolation step. All results are improved relative to the “closest” case. The scenes with the largest errors (the coastline and edges scenes) are improved by more than a factor of 10. Importantly, all the simulated errors are now less than the typical NEDTs for satellite-borne radiometers.
3.3. Caveats and Limitations
In the treatment above, we have assumed that the geolocation accuracy of the satellite data is perfect. For actual microwave satellite data, there are possible geolocation errors in the range of 1–2 km [
11], which would also contribute to the radiance errors for complex scenes. The additional sources of data indicate that further improvements to the algorithm presented above are not useful in practice, since it is likely that the geolocation errors will dominate the error budget.
A second assumption is that the native footprints can be accurately approximated using the near-Gaussian functions in Equation (8). The actual footprints will have additional features such as sidelobes that will modify the shape of the resampled footprint. If detailed and accurate antenna gain patterns were available, these effects could be ameliorated by our method, but often such detailed information is not provided by the instrument teams, and if available, are based on ground-based results from antenna measurements performed in the near-field, which may not accurately represent on-orbit behavior.
3.4. Example Output Using AMSR2 Measurements
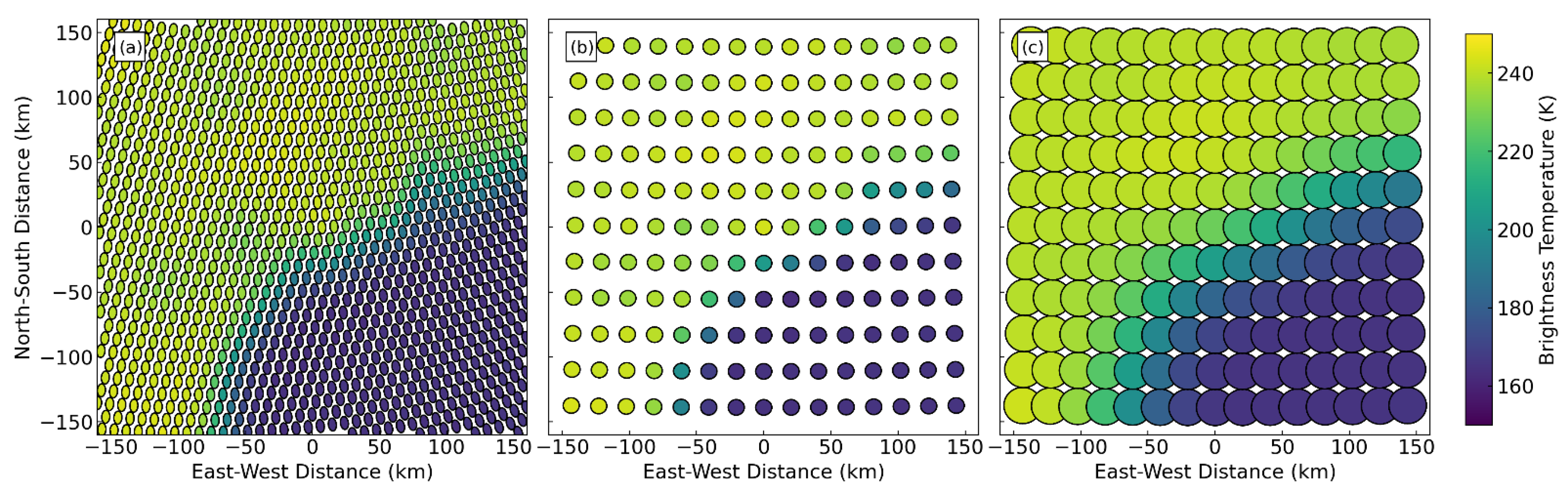
We have used the described method to resample AMSR2 radiances to both 30 km and 70 km circulator footprints onto a regular latitude-longitude grid. In
Figure 9, we show an example of the regular latitude–longitude grid for a location centered at 44 N, 74 E on the coast of Maine. The elliptical footprints in panel (a) are resampled and interpolated to the 30 km and 70 km circular footprints in panels (b and c). Note that the 70 km results are smoother than the 30 km results due to the loss of spatial resolution caused by resampling to the larger footprints.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}