

A Parallax Shift Effect Correction Based on Cloud Top Height for FY-4A Lightning Mapping Imager (LMI)

Abstract
:
1. Introduction
2. Data and Methodology
2.1. The FY-4A LMI Data
2.2. The FY-4A Advanced Geosynchronous Radiation Imager (AGRI) Data
2.3. Ground-Based Total Lightning Data of BLNET
2.4. Radar Data
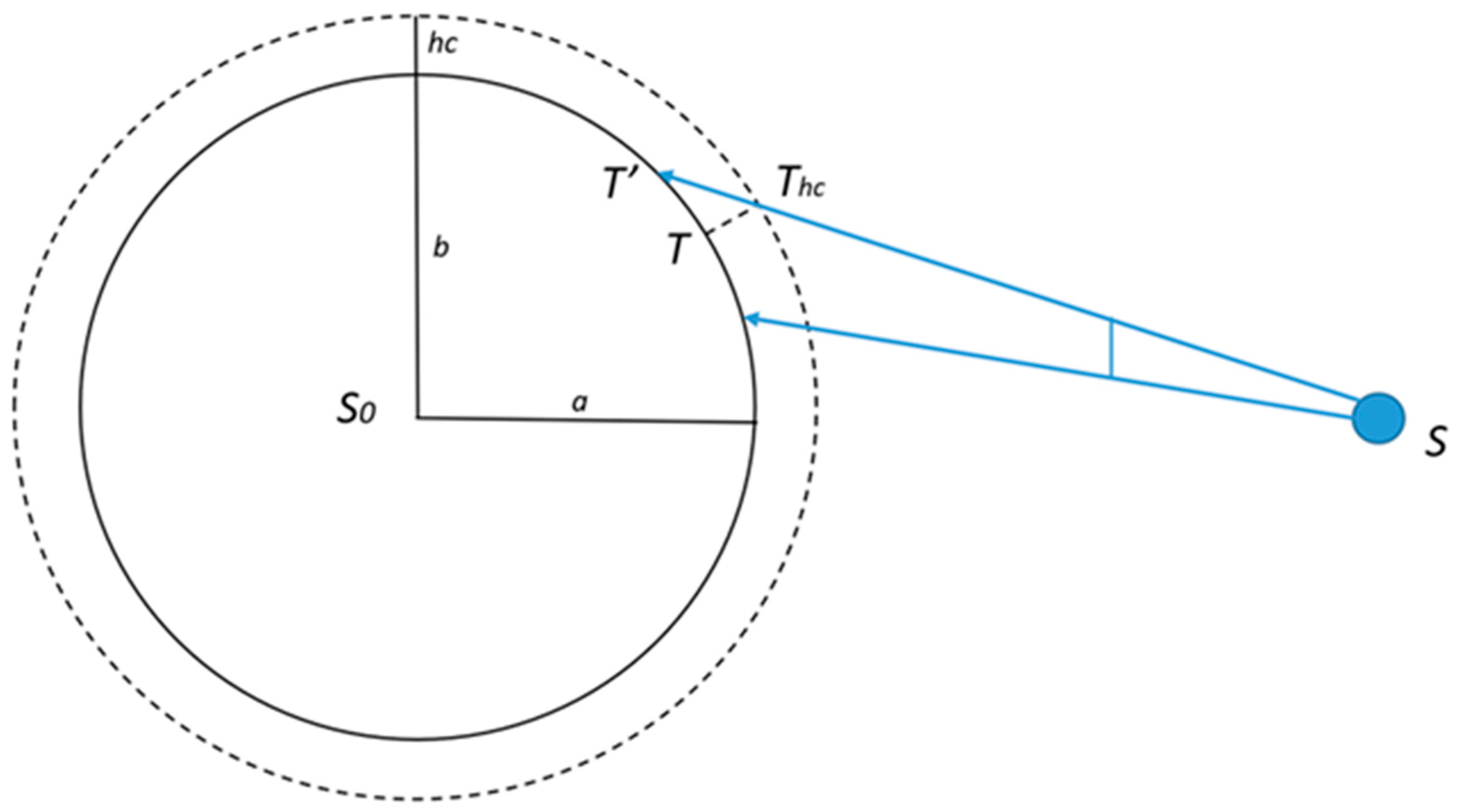
2.5. The Impact of CTH on Lightning Localization Data
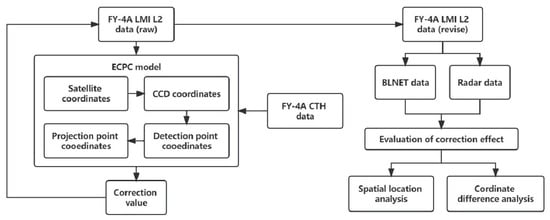
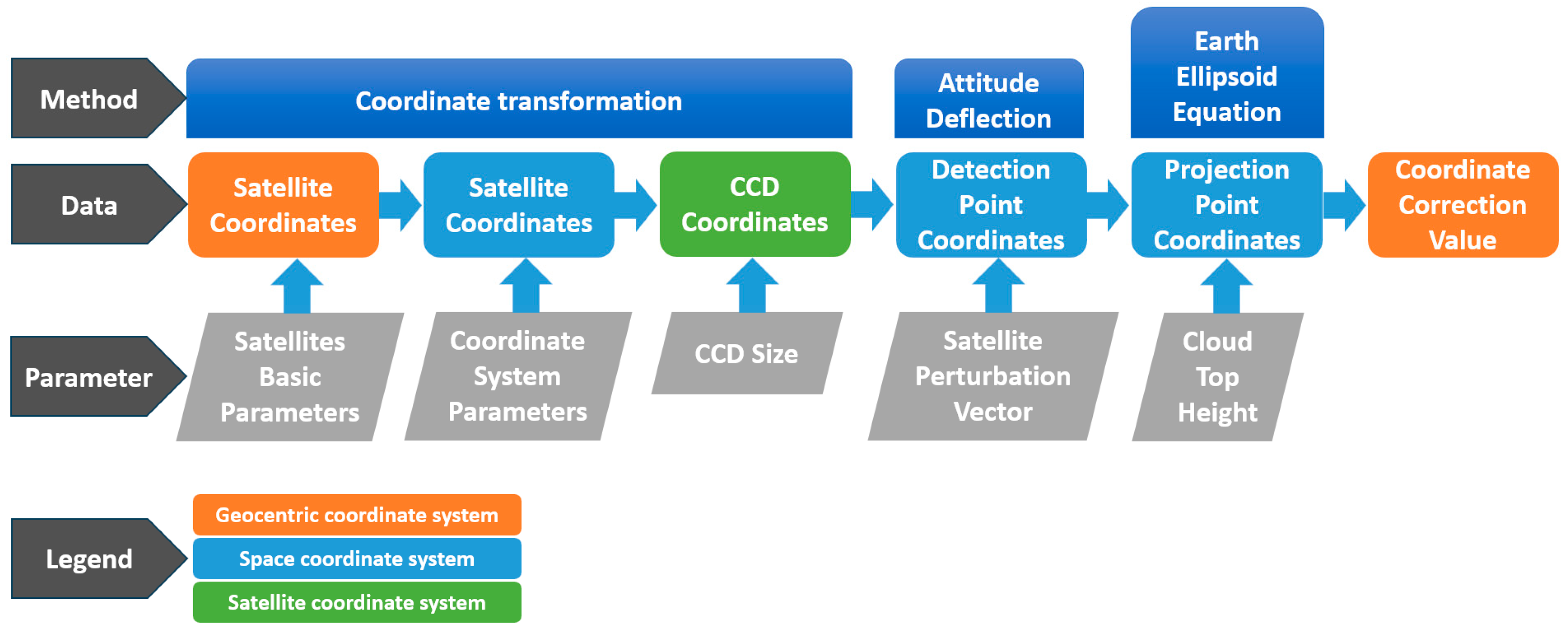
2.6. Construction of ECPC Model
3. Results
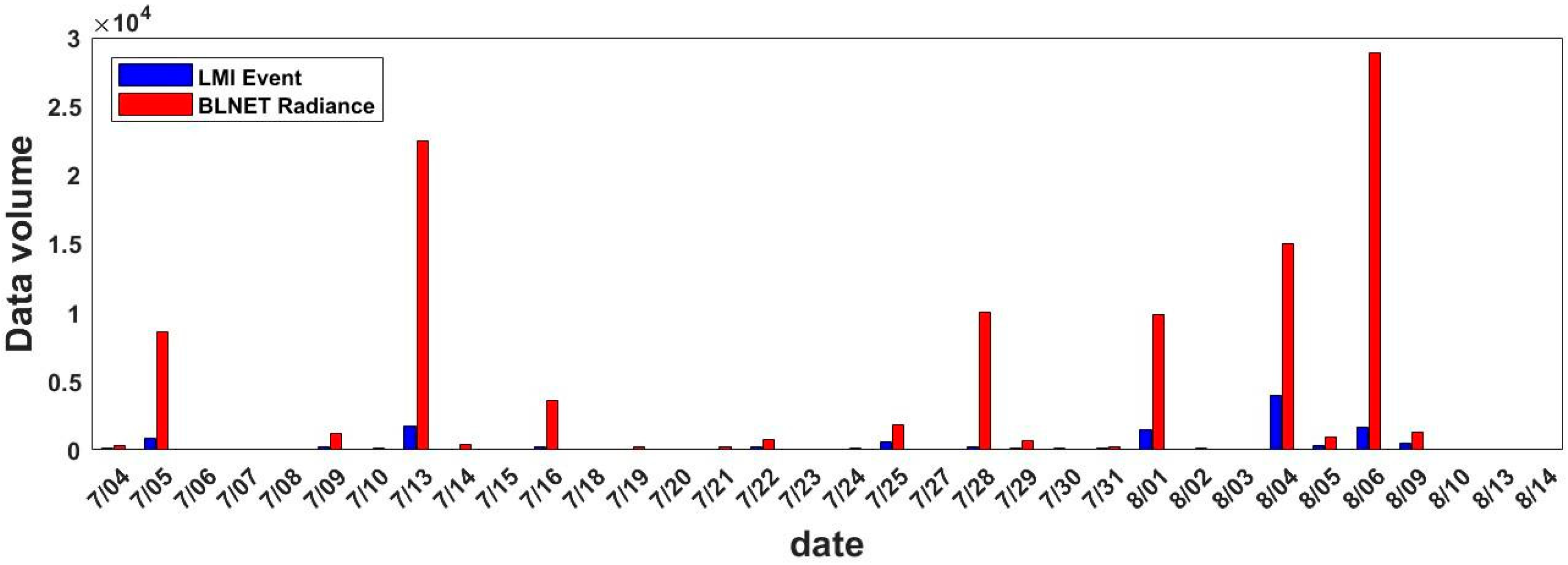
3.1. Comparison of Lightning Localization Data between FY-4A LMI and BLNET
3.2. Simulation of Correction with the Proposed EXPC Model under 12 km CTH Scenerio
3.3. Correction of CTH Detection for FY-4A LMI
3.4. Evaluation of the Correction Effect of the Lightning Location and the ECPC Model
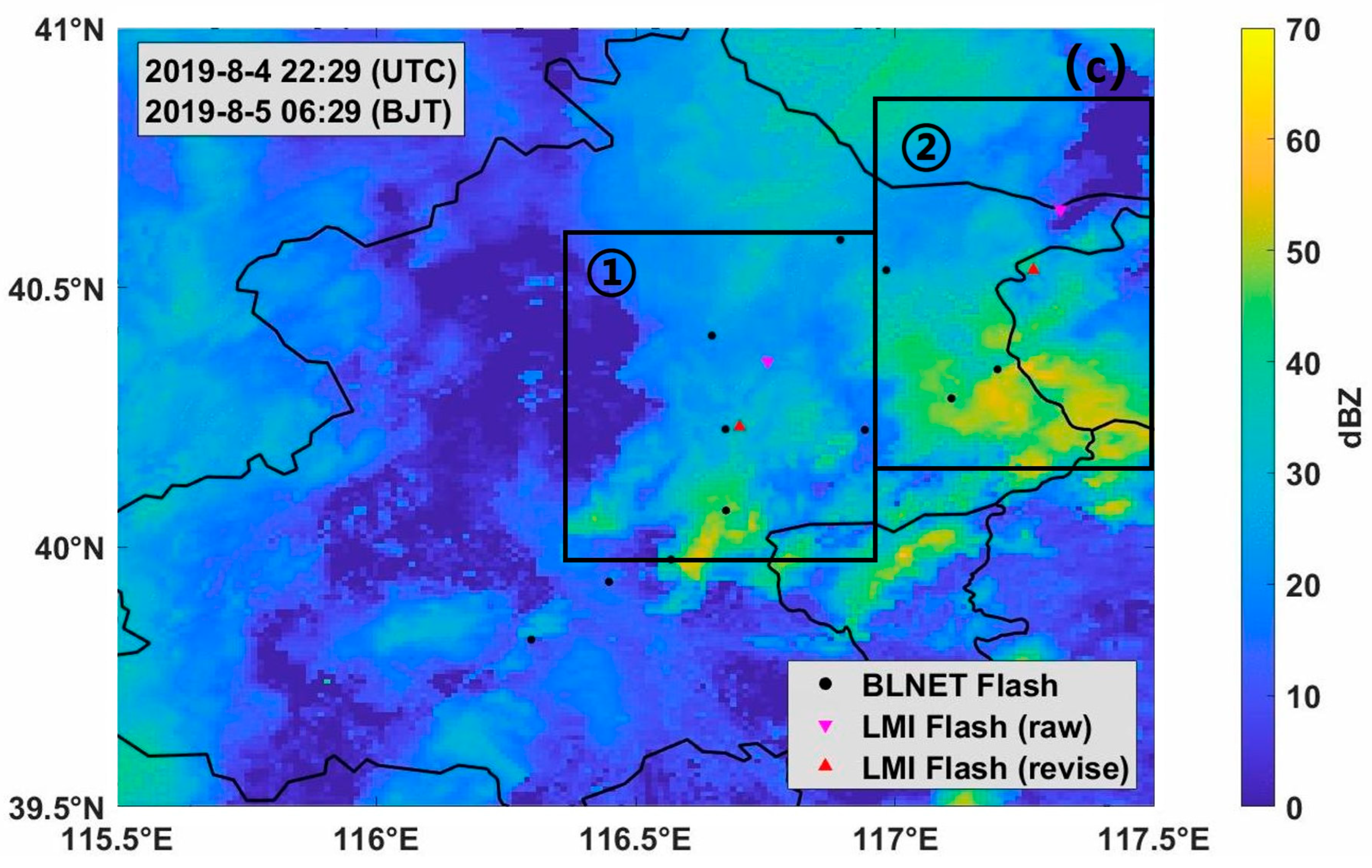
3.4.1. Spatial Distribution of LMI and BLNET lightning during the Vigorous Stage of a Severe Convective Weather System
3.4.2. Spatial Distribution of LMI and BLNET lightning during the Weakening Stage of Severe Convective Weather Activity
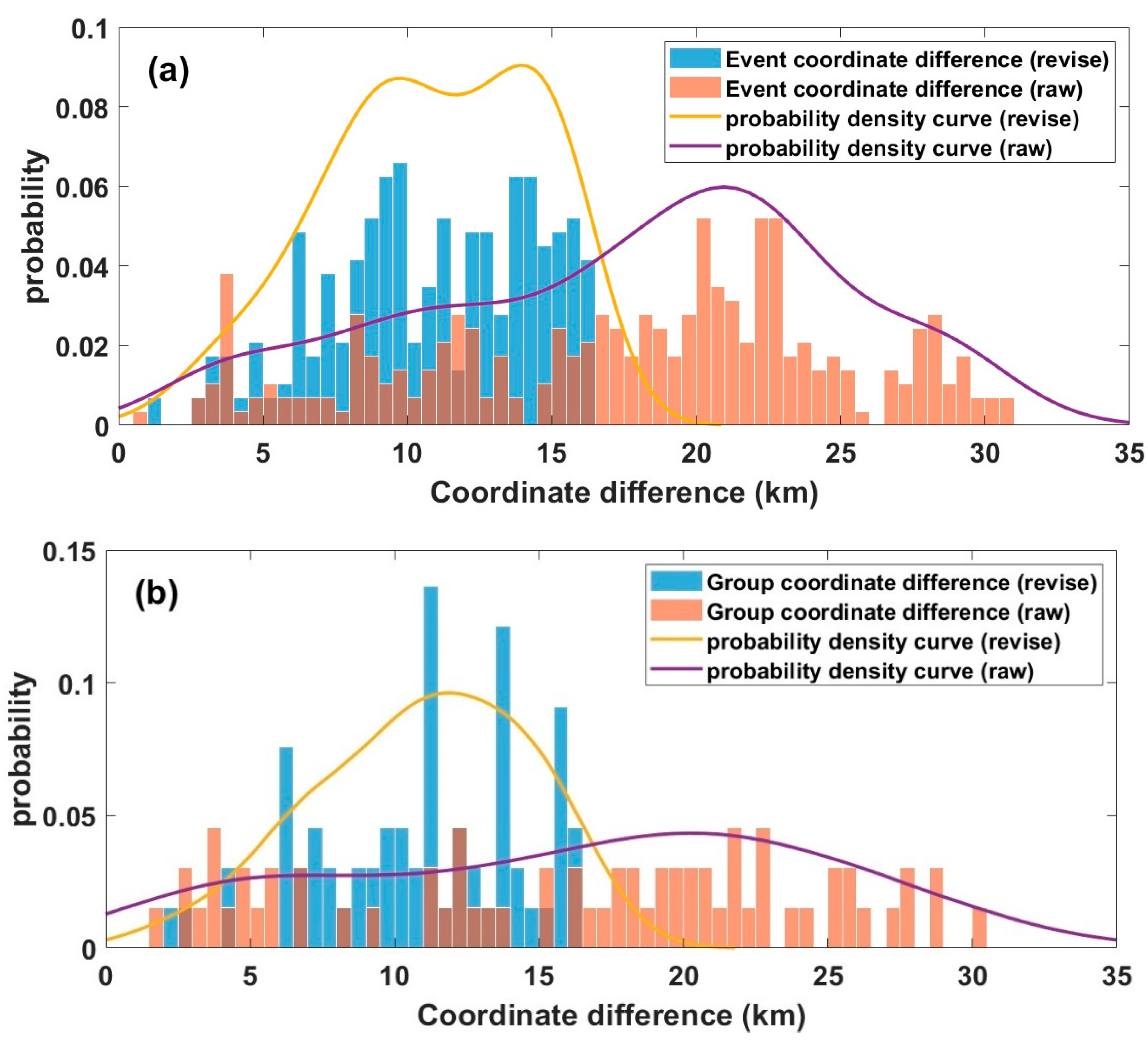
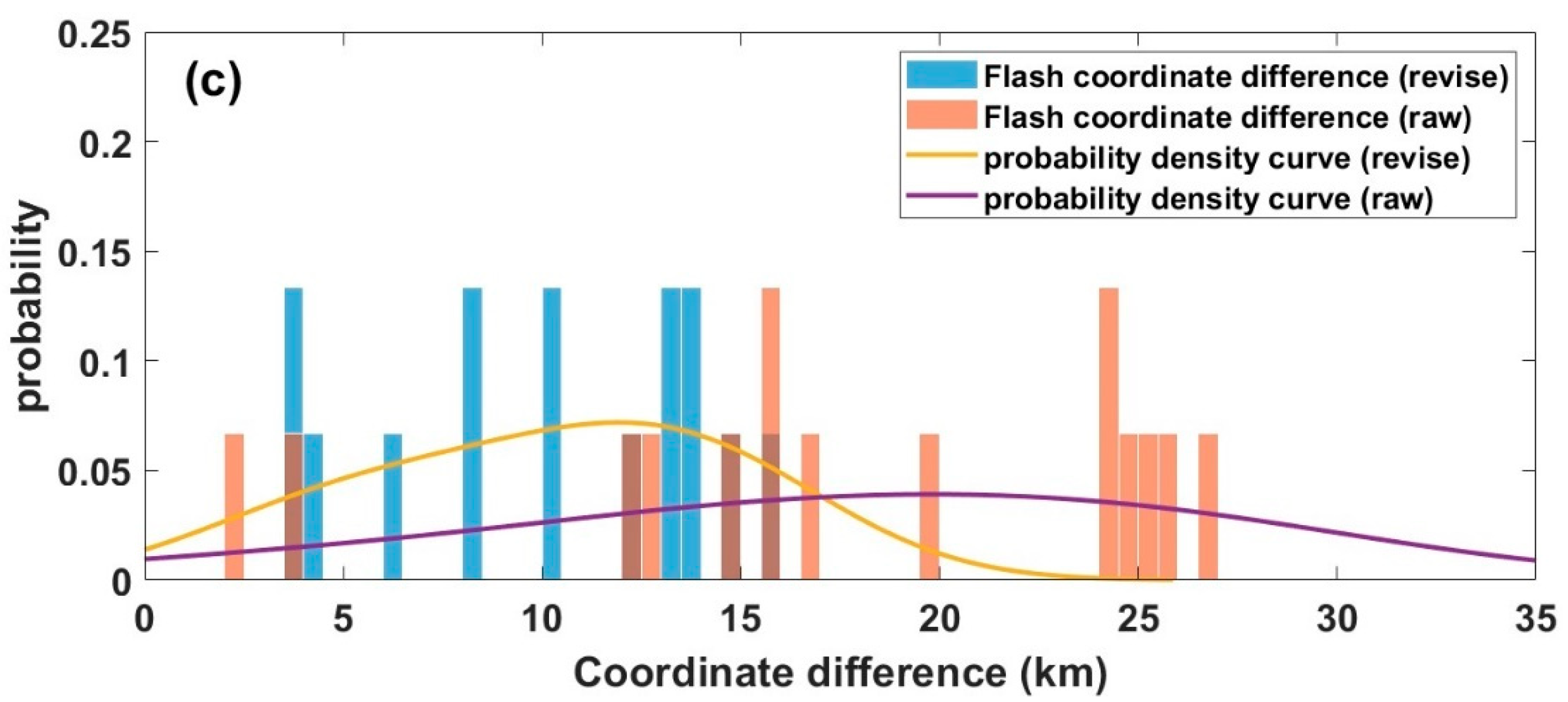
3.4.3. Quantitative Analysis on the Differences between Matched LMI and BLNET Data
4. Discussions and Conclusions
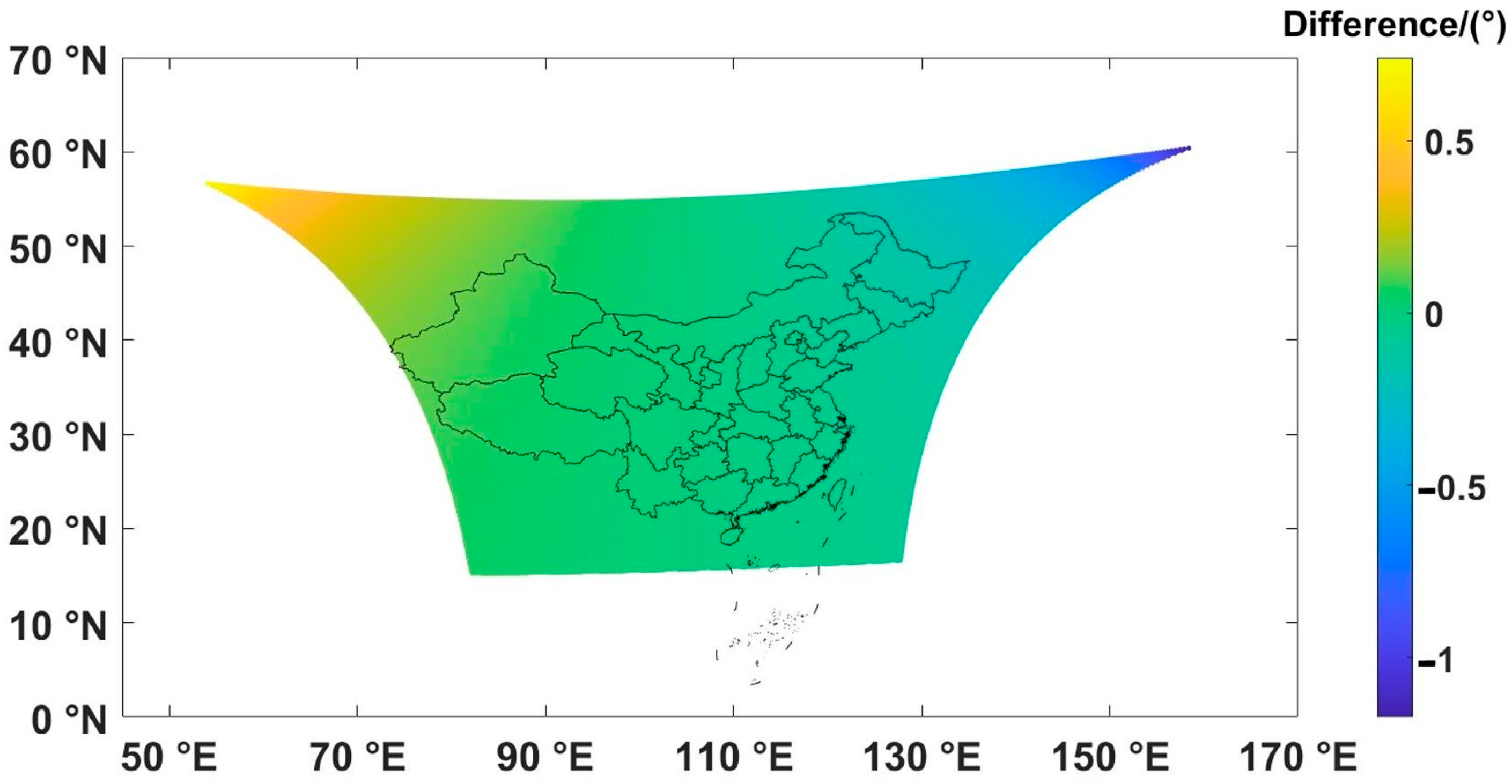
- The deviation in vertically pointing full-disc data towards the geocenter exhibits a progressive increase as one moves away from the center of the observation range (nadir). Regarding the LMI observations, when considering the average height of convective clouds (12 km), the deviation of the CCD projection plane demonstrates a rise with latitude due to the northward shift in the LMI observation perspective. Consequently, this phenomenon induces a heightened influence of CTH on lightning positioning from the southern to the northern regions. Additionally, the eastward correction values experience a gradual escalation from the central axis of the observation range towards the extremities of the detection scope. Simultaneously, the northward correction values incrementally increase from lower to higher latitudes. Across numerous regions, particularly those proximate to the observation range’s periphery, the spatial extent of these correction values surpasses the spatial resolution of the CCD detection unit. Consequently, the imperative to rectify the lightning positioning data derived from the LMI becomes evident.
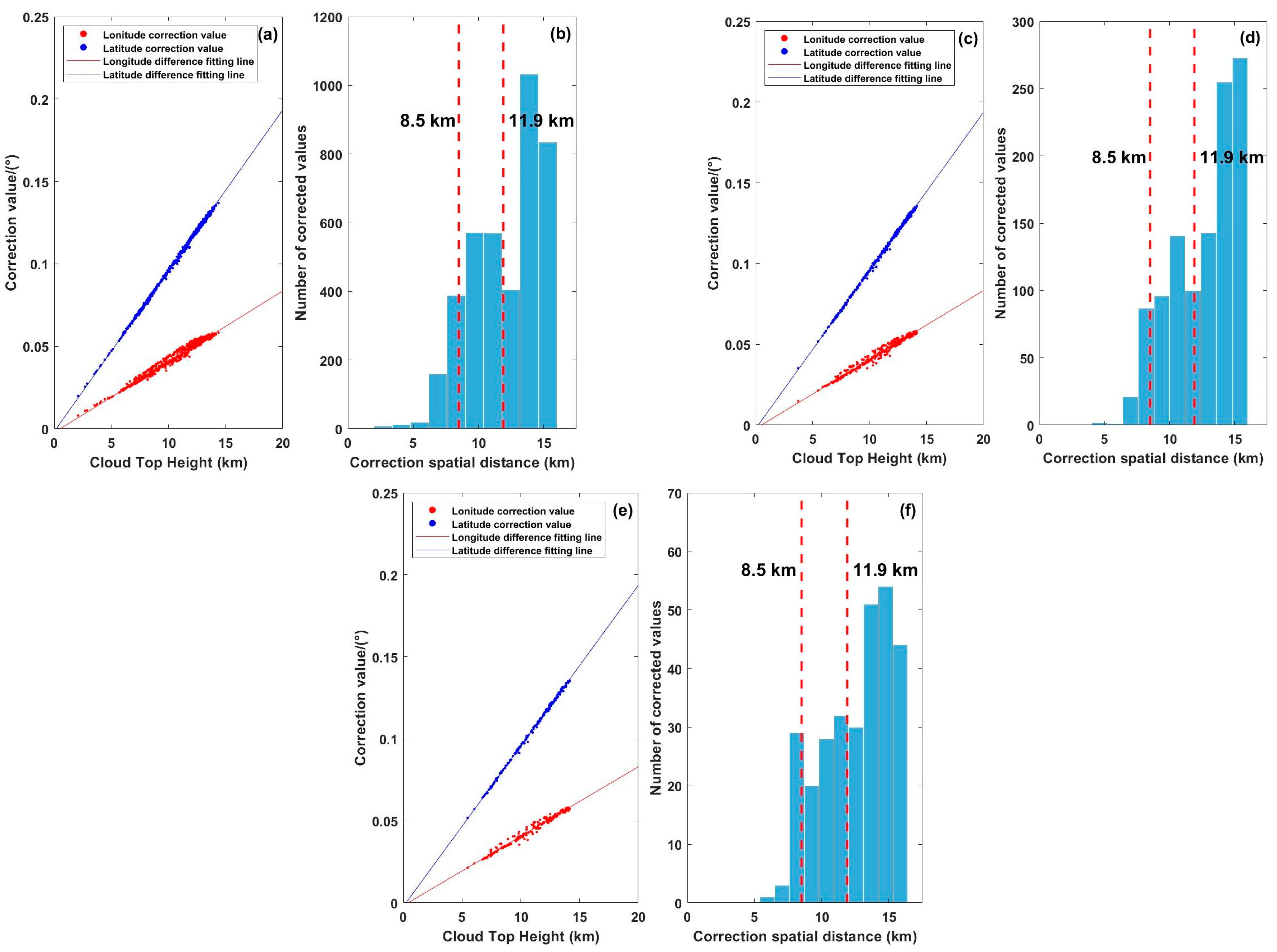
- Using Beijing as a case study, the disparity in coordinate positions yields a relatively modest impact on the precision of lightning positioning. The extent of correction values is primarily contingent upon CTH. Analyzing the distribution patterns of correction values derived from real CTH measurements and simulated corrections with a fixed CTH unveils a discernible positive correlation. This signifies the congruence and practicability of the ECPC model, both theoretically and empirically. In particular, the correction values related to latitude exhibit a considerably more pronounced magnitude than those associated with longitude. This phenomenon is attributed to the inherent characteristics of the LMI instrument itself, as well as the spatial orientation of the observed area. Beijing’s geographical location positions it close to the observation range’s center, thereby rendering it less susceptible to longitude-based influences. However, being situated within a mid-latitude region, the instrument’s latitude deviation incrementally intensifies from south to north. Consequently, the latitude deviation surpasses the longitude deviation, resulting in an overall northward shift in the data.
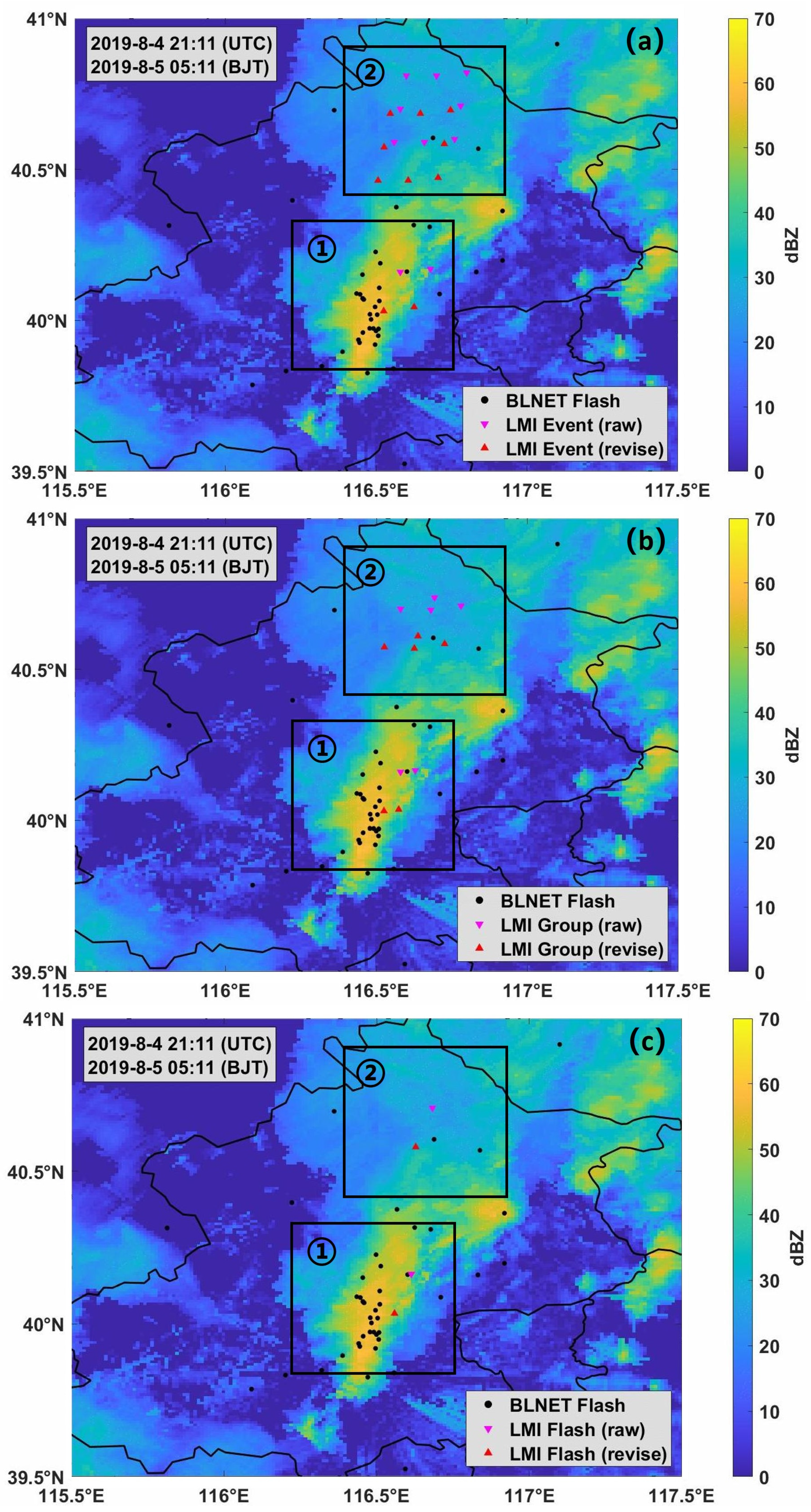
- Through a comprehensive comparison involving pre- and post-correction LMI data, BLNET data, and radar data, noteworthy observations have come to light. It is evident that the data points identified using the BLNET align remarkably well with areas characterized by robust radar echoes. Conversely, the LMI data prior to correction demonstrate a north-easterly bias in relation to the BLNET data. Following the application of the correction model, the event data display substantial convergence with the BLNET data. Furthermore, the calculated lightning positions for both group and flash data closely mirror the ground-based detection data. The impact of the correction model is particularly pronounced in instances of mild convective weather events. In essence, these outcomes underscore the pronounced efficacy of the correction model, particularly during episodes of weaker convective weather activities.
- This research systematically undertakes a quantitative assessment of the coordinate disparities among the three distinct LMI datasets and the ground-based BLNET data post correction within the context of a potent convective weather system. Notably, the coordinate disparities of the corrected data experience a substantial reduction, fostering a greater degree of convergence within the overall distribution of coordinate differences. Comparing the distribution traits of the data before and after correction across the three LMI datasets reveals a fundamental similarity. This similarity underscores the effectiveness and widespread applicability of the lightning-mapping ECPC model across all three categories of LMI data. In summary, these findings affirm the model’s efficacy and universality in ameliorating coordinate discrepancies for the diverse LMI data types, substantiating its reliability and value across various scenarios.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qie, X.; Zhang, Y.; Zhang, D.; Yin, Y.; Yu, Y.; Lu, G.; Jiang, R. Principles and Forecast of Thunderbolt Weather System; Science Press: Beijing, China, 2023. (In Chinese) [Google Scholar]
- Wang, Y.; Qie, X.; Wang, D.; Liu, M.; Su, D.; Shen, Y.; Wu, Z.; Liu, D.; Sun, Z. Beijing Lightning NETwork (BLNET): Configuration and Preliminary Results of Lightning Location. Chin. J. Atmos. Sci. 2015, 39, 571–582. (In Chinese) [Google Scholar]
- Zhang, Y.; Zhang, Y.; Zou, M.; Wang, J.; Li, Y.; Tan, Y.; Feng, Y.; Zhang, H.; Zhu, S. Advances in Lightning Monitoring and Location Technology Research in China. Remote Sens. 2022, 14, 1293. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Z.; Wei, C.; Lu, F.; Guo, Q. Introducing the New Generation of Chinese Geostationary Weather Satellites, Fengyun-4. Bull. Am. Meteorol. Soc. 2017, 98, 1637–1658. [Google Scholar] [CrossRef]
- Goodman, S.J.; Blakeslee, R.J.; Koshak, W.J.; Mach, D.; Bailey, J.; Buechler, D.; Carey, L.; Schultz, C.; Bateman, M.; McCaul, E.; et al. The GOES-R Geostationary Lightning Mapper (GLM). Atmos. Res. 2013, 125–126, 34–49. [Google Scholar] [CrossRef]
- Peterson, M.; Lay, E. GLM Observations of the Brightest Lightning in the Americas. J. Geophys. Res. Atmos. 2020, 125, e2020JD033378. [Google Scholar] [CrossRef]
- Rutledge, S.A.; Hilburn, K.A.; Clayton, A.; Fuchs, B.; Miller, S.D. Evaluating Geostationary Lightning Mapper Flash Rates within Intense Convective Storms. J. Geophys. Res. Atmos. 2020, 125, e2020JD032827. [Google Scholar] [CrossRef]
- Roebeling, R.A.; Holleman, I. SEVIRI rainfall retrieval and validation using weather radar observations. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef]
- Henken, C.C.; Schmeits, M.J.; Deneke, H.; Roebeling, R.A. Using MSG-SEVIRI Cloud Physical Properties and Weather Radar Observations for the Detection of Cb/TCu Clouds. J. Appl. Meteorol. Clim. 2011, 50, 1587–1600. [Google Scholar] [CrossRef]
- Wang, C.; Luo, Z.J.; Huang, X. Parallax correction in collocating CloudSat and Moderate Resolution Imaging Spectroradiometer (MODIS) observations: Method and application to convection study. J. Geophys. Res. Atmos. 2011, 116. [Google Scholar] [CrossRef]
- Chen, J.; Yang, J.; An, W.; Chen, Z. An Attitude Jitter Correction Method for Multispectral Parallax Imagery Based on Compressive Sensing. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1903–1907. [Google Scholar] [CrossRef]
- Frantz, D.; Haß, E.; Uhl, A.; Stoffels, J.; Hill, J. Improvement of the Fmask algorithm for Sentinel-2 images: Separating clouds from bright surfaces based on parallax effects. Remote Sens. Environ. 2018, 215, 471–481. [Google Scholar] [CrossRef]
- Guo, Q.; Feng, X.; Yang, C.; Chen, B. Improved Spatial Collocation and Parallax Correction Approaches for Calibration Accuracy Validation of Thermal Emissive Band on Geostationary Platform. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2647–2663. [Google Scholar] [CrossRef]
- Greuell, W.; Roebeling, R.A. Toward a Standard Procedure for Validation of Satellite-Derived Cloud Liquid Water Path: A Study with SEVIRI Data. J. Appl. Meteorol. Clim. 2009, 48, 1575–1590. [Google Scholar] [CrossRef]
- Li, S.; Sun, D.; Yu, Y. Automatic cloud-shadow removal from flood/standing water maps using MSG/SEVIRI imagery. Int. J. Remote Sens. 2013, 34, 5487–5502. [Google Scholar] [CrossRef]
- Vicente, G.A.; Davenport, J.C.; Scofield, R.A. The role of orographic and parallax corrections on real time high resolution satellite rainfall rate distribution. Int. J. Remote Sens. 2002, 23, 221–230. [Google Scholar] [CrossRef]
- Bieliński, T. A Parallax Shift Effect Correction Based on Cloud Height for Geostationary Satellites and Radar Observations. Remote Sens. 2020, 12, 365. [Google Scholar] [CrossRef]
- Takenaka, H.; Sakashita, T.; Higuchi, A.; Nakajima, T. Geolocation Correction for Geostationary Satellite Observations by a Phase-Only Correlation Method Using a Visible Channel. Remote Sens. 2020, 12, 2472. [Google Scholar] [CrossRef]
- Chen, S.; Yang, Y.; Cui, T. Study of the cloud effect on lightning detection by geostationary satellite. Chin. J. Geophys. 2012, 55, 797–803. (In Chinese) [Google Scholar]
- Hui, W.; Zhang, W.; Lyu, W.; Li, P. Preliminary Observations from the China Fengyun-4A Lightning Mapping Imager and Its Optical Radiation Characteristics. Remote Sens. 2020, 12, 2622. [Google Scholar] [CrossRef]
- Cao, D.; Lu, F.; Zhang, X.; Yang, J. Lightning Activity Observed by the FengYun-4A Lightning Mapping Imager. Remote Sens. 2021, 13, 3013. [Google Scholar] [CrossRef]
- Chen, Z.; Qie, X.; Sun, J.; Xiao, X.; Zhang, Y.; Cao, D.; Yang, J. Evaluation of Fengyun-4A Lightning Mapping Imager (LMI) Performance during Multiple Convective Episodes over Beijing. Remote Sens. 2021, 13, 1746. [Google Scholar] [CrossRef]
- Cao, D. The Development of Product Algorithm of the Fengyun-4 Geostationary Lightning Mapping Imager. Adv. Meteorol. Sci. Technol. 2016, 6, 94–98. (In Chinese) [Google Scholar]
- Min, M.; Wu, C.; Li, C.; Liu, H.; Xu, N.; Wu, X.; Chen, L.; Wang, F.; Sun, F.; Qin, D.; et al. Developing the science product algorithm testbed for Chinese next-generation geostationary meteorological satellites: Fengyun-4 series. J. Meteorol. Res. 2017, 31, 708–719. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, L.; Xian, D.; Xu, Z. Recent Progress of Fengyun Meteorology Satellites. Chin. J. Space Sci. 2018, 38, 788–796. [Google Scholar] [CrossRef]
- Wang, G.; Shen, X. The FY-4 radiometer imager and the application of its data in the satellite meteorology. Chin. J. Nat. 2018, 40, 1–11. (In Chinese) [Google Scholar]
- Tan, Z.; Ma, S.; Zhao, X.; Yan, W.; Lu, W. Evaluation of Cloud Top Height Retrievals from China’s Next-Generation Geostationary Meteorological Satellite FY-4A. J. Meteorol. Res. 2019, 33, 553–562. [Google Scholar] [CrossRef]
- Wang, Y.; Qie, X.; Wang, D.; Liu, M.; Su, D.; Wang, Z.; Liu, D.; Wu, Z.; Sun, Z.; Tian, Y. Beijing Lightning Network (BLNET) and the observation on preliminary breakdown processes. Atmos. Res. 2015, 171, 121–132. [Google Scholar] [CrossRef]
- Yuan, S.; Qie, X.; Jiang, R.; Wang, D.; Wang, Y.; Wang, C.; Srivastava, A.; Tian, Y. In-cloud discharge of positive cloud-to-ground lightning and its influence on the initiation of tower-initiated upward lightning. J. Geophys. Res. Atmos. 2021, 126, e2021JD035600. [Google Scholar] [CrossRef]
- Srivastava, A.; Tian, Y.; Qie, X.; Wang, D.; Sun, Z.; Yuan, S.; Wang, Y.; Chen, Z.; Xu, W.; Zhang, H.; et al. Performance assessment of Beijing Lightning Network (BLNET) and comparison with other lightning location networks across Beijing. Atmos. Res. 2017, 197, 76–83. [Google Scholar] [CrossRef]
- Wang, D.; Sun, Z.; Yuan, S.; Lu, J.; Qie, X.; Liu, M.; Xu, Y.; Lu, G.; Tian, Y. Beijing Broadband Lightning NETwork and the Spatiotemporal Evolution of Lightning Flashes during a Thunderstorm. Chin. J. Atmos. Sci. 2020, 44, 851–864. (In Chinese) [Google Scholar]
- Qie, X.; Yuan, S.; Chen, Z.; Wang, D.; Liu, D.; Sun, M.; Sun, Z.; Srivastava, A.; Zhang, H.; Lu, J.; et al. Understanding the dynamical-microphysical-electrical processes associated with severe thunderstorms over the Beijing metropolitan region. Sci. China Earth Sci. 2021, 64, 10–26. [Google Scholar] [CrossRef]
- Yu, H.; Zhang, H.; Liu, D.; Chen, Z.; Tian, Y.; Yuan, S.; Wang, D.; Lu, J.; Zhou, J.; Qie, X. Relationship between Lightning Activities and Radar Echoes of Squall Line Convective Systems. Chin. J. Atmos. Sci. 2022, 46, 835–844. [Google Scholar]
- Lu, J.; Qie, X.; Jiang, R.; Xiao, X.; Liu, D.; Li, J.; Yuan, S.; Chen, Z.; Wang, D.; Tian, Y.; et al. Lightning activity during convective cell mergers in a squall line and corresponding dynamical and thermodynamical characteristics. Atmos. Res. 2021, 256, 105555. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, X.; Xu, J. Image Navigation for the FY2 Geosynchronous Meteorological Satellite. J. Atmos. Ocean. Technol. 2008, 25, 1149–1165. [Google Scholar] [CrossRef]
- Lu, J.; Qie, X.; Xiao, X.; Jiang, R.; Mansell, E.R.; Fierro, A.O.; Liu, D.; Chen, Z.; Yuan, S.; Sun, M.; et al. Effects of Convective Mergers on the Evolution of Microphysical and Electrical Activity in a Severe Squall Line Simulated by WRF Coupled with Explicit Electrification Scheme. J. Geophys. Res. Atmos. 2022, 127, e2021JD036398. [Google Scholar] [CrossRef]
- Peterson, M.; Light, T.E.L.; Mach, D. The Illumination of Thunderclouds by Lightning: 1. The Extent and Altitude of Optical Lightning Sources. J. Geophys. Res. Atmos. 2022, 127, e2021JD035579. [Google Scholar] [CrossRef]
- Weiss, S.A.; MacGorman, D.R.; Calhoun, K.M. Lightning in the Anvils of Supercell Thunderstorms. Mon. Weather Rev. 2012, 140, 2064–2079. [Google Scholar] [CrossRef]
- Bruning, E.C.; MacGorman, D.R. Theory and Observations of Controls on Lightning Flash Size Spectra. J. Atmos. Sci. 2013, 70, 4012–4029. [Google Scholar] [CrossRef]
- Zheng, D.; Wang, D.; Zhang, Y.; Wu, T.; Takagi, N. Charge Regions Indicated by LMA Lightning Flashes in Hokuriku’s Winter Thunderstorms. J. Geophys. Res. 2019, 124, 7179–7206. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | LMI | BLNET | |||
|---|---|---|---|---|---|
| Event | Group | Flash | Radiation Event | Flash | |
| 4 August 2019 | 3999 | 1119 | 292 | 14958 | 8160 |
| Parameter | Variable | Value |
|---|---|---|
| Satellite position | ||
| Satellite orbital altitude | ||
| Ellipsoid long half axis | ||
| Ellipsoid short half axis | ||
| Instrument tilt angle | ||
| Number of detection units | ||
| Detection unit size | ||
| X-axis attitude angle | ||
| Y-axis attitude angle | ||
| Z-axis attitude angle | ||
| Focal length |
| Country | City | Longitude, Latitude | Longitude Correction Values (°) | Latitude Correction Values (°) | Distance (km) |
|---|---|---|---|---|---|
| China | Beijing | 116.47°E, 39.90°N | −0.0475 | −0.1128 | 13.1558 |
| Tianjin | 117.18°E, 39.15°N | −0.0494 | −0.1094 | 12.8649 | |
| Shanghai | 121.48°E, 31.23°N | −0.0542 | −0.0802 | 10.2854 | |
| Chongqing | 106.53°E, 29.53°N | −0.0056 | −0.0741 | 8.2390 | |
| Shijiazhuang | 114.46°E, 38.03°N | −0.0369 | −0.1047 | 12.0583 | |
| Taiyuan | 112.56°E, 37.86°N | −0.0294 | −0.1038 | 11.8025 | |
| Xi’an | 108.90°E, 34.26°N | −0.0141 | −0.0900 | 10.0691 | |
| Jinan | 117.00°E, 36.63°N | −0.0452 | −0.0991 | 11.7128 | |
| Zhengzhou | 113.70°E, 34.80°N | −0.0310 | −0.0920 | 10.5931 | |
| Shenyang | 123.40°E, 41.83°N | −0.0831 | −0.1223 | 15.2192 | |
| Changchun | 125.31°E, 43.86°N | −0.0998 | −0.1330 | 16.7900 | |
| Harbin | 126.68°E, 45.75°N | −0.1153 | −0.1436 | 18.2767 | |
| Nanjing | 118.83°E, 32.03°N | −0.0461 | −0.0828 | 10.1645 | |
| Hangzhou | 120.15°E, 30.23°N | −0.0487 | −0.0767 | 9.7135 | |
| Hefei | 117.30°E, 31.85°N | −0.0407 | −0.0821 | 9.8883 | |
| Nanchang | 115.86°E, 28.68°N | −0.0335 | −0.0716 | 8.5911 | |
| Fuzhou | 119.30°E, 26.08°N | −0.0420 | −0.0639 | 8.2399 | |
| Wuhan | 114.29°E, 30.61°N | −0.0299 | −0.0779 | 9.1051 | |
| Changsha | 113.00°E, 28.18°N | −0.0245 | −0.0699 | 8.1192 | |
| Chengdu | 104.08°E, 30.65°N | 0.0018 | −0.0777 | 8.6222 | |
| Guangzhou | 113.25°E, 23.13°N | −0.0229 | −0.0554 | 6.5783 | |
| Guiyang | 106.70°E, 26.58°N | −0.0056 | −0.0650 | 7.2330 | |
| Haikou | 110.31°E, 19.95°N | −0.0142 | −0.0468 | 5.4007 | |
| Kunming | 102.68°E, 25.00°N | 0.0056 | −0.0605 | 6.7360 | |
| Lanzhou | 103.81°E, 36.05°N | 0.0031 | −0.0970 | 10.7654 | |
| Xining | 101.75°E, 36.63°N | 0.0107 | −0.0987 | 10.9920 | |
| Hohhot | 111.80°E, 40.81°N | −0.0291 | −0.1165 | 13.1557 | |
| Nanning | 108.33°E, 22.80°N | −0.0096 | −0.0543 | 6.1044 | |
| Lhasa | 90.13°E, 29.65°N | 0.0449 | −0.0747 | 9.3570 | |
| Yinchuan | 106.26°E, 38.33°N | −0.0058 | −0.1057 | 11.7380 | |
| Urumqi | 87.60°E, 43.80°N | 0.0811 | −0.1323 | 16.0595 | |
| Hong Kong | 114.16°E, 22.30°N | −0.0251 | −0.0531 | 6.4335 | |
| Macau | 113.58°E, 22.23°N | −0.0233 | −0.0530 | 6.3514 | |
| Taipei | 121.51°E, 25.05°N | −0.0477 | −0.0612 | 8.3213 | |
| Australia | Broome | 122.24°E, 17.92°S | −0.0450 | −0.0420 | 6.6657 |
| Onslow | 115.10°E, 21.73°S | −0.0275 | −0.0516 | 6.3922 | |
| Perth | 115.82°E, 31.96°S | −0.0357 | −0.0823 | 9.7335 | |
| Kalgoorlie | 121.44°E, 30.76°S | −0.0535 | −0.0787 | 10.1208 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Cao, D.; Yang, J.; Lu, F.; Wang, D.; Liu, R.; Zhang, H.; Liu, D.; Chen, Z.; Lyu, H.; et al. A Parallax Shift Effect Correction Based on Cloud Top Height for FY-4A Lightning Mapping Imager (LMI). Remote Sens. 2023, 15, 4856. https://doi.org/10.3390/rs15194856
Zhang Y, Cao D, Yang J, Lu F, Wang D, Liu R, Zhang H, Liu D, Chen Z, Lyu H, et al. A Parallax Shift Effect Correction Based on Cloud Top Height for FY-4A Lightning Mapping Imager (LMI). Remote Sensing. 2023; 15(19):4856. https://doi.org/10.3390/rs15194856
Chicago/Turabian StyleZhang, Yuansheng, Dongjie Cao, Jing Yang, Feng Lu, Dongfang Wang, Ruiting Liu, Hongbo Zhang, Dongxia Liu, Zhixiong Chen, Huimin Lyu, and et al. 2023. "A Parallax Shift Effect Correction Based on Cloud Top Height for FY-4A Lightning Mapping Imager (LMI)" Remote Sensing 15, no. 19: 4856. https://doi.org/10.3390/rs15194856
APA StyleZhang, Y., Cao, D., Yang, J., Lu, F., Wang, D., Liu, R., Zhang, H., Liu, D., Chen, Z., Lyu, H., Cai, W., Bao, S., & Qie, X. (2023). A Parallax Shift Effect Correction Based on Cloud Top Height for FY-4A Lightning Mapping Imager (LMI). Remote Sensing, 15(19), 4856. https://doi.org/10.3390/rs15194856