



Remote Sensing and Deep Learning to Understand Noisy OpenStreetMap †



Abstract
:1. Introduction
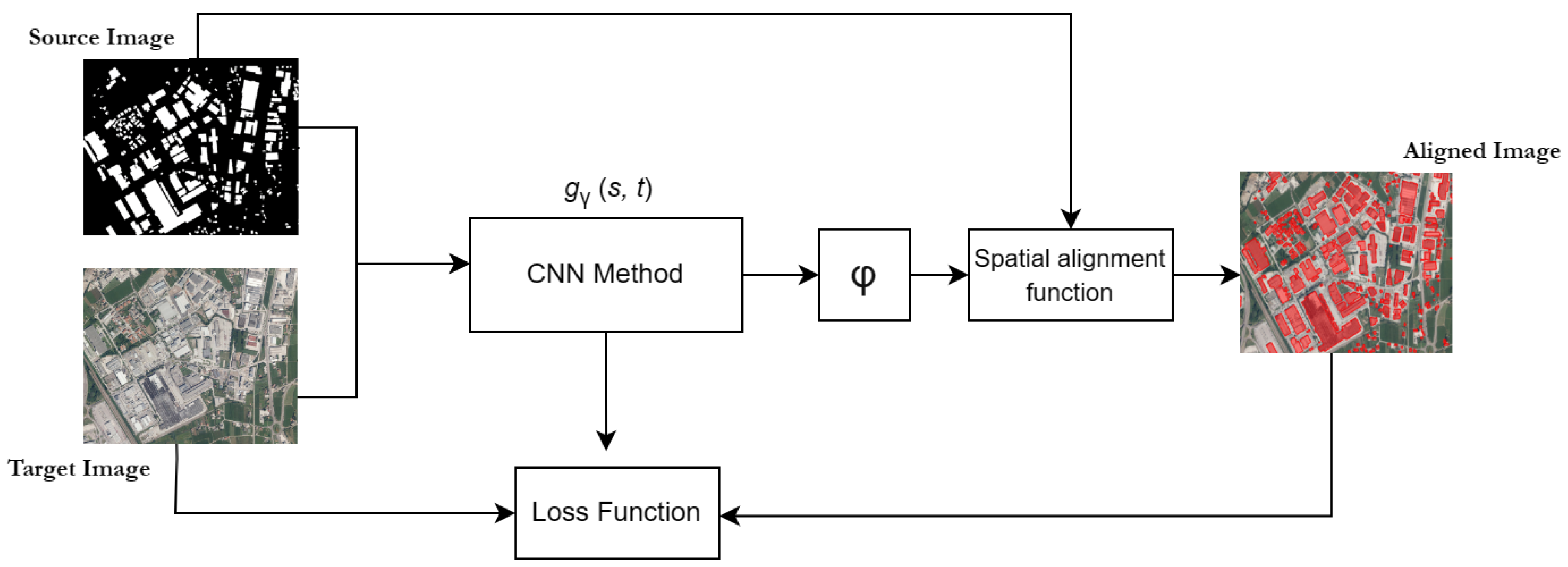
- Building footprints are regularly labeled but are up to 9 m off-center on the image plane [10]. The reason for this shift is that images used to digitize the footprint are different from the images used for further analysis. The misalignment issue is referred as registration noise, as shown in Figure 1.
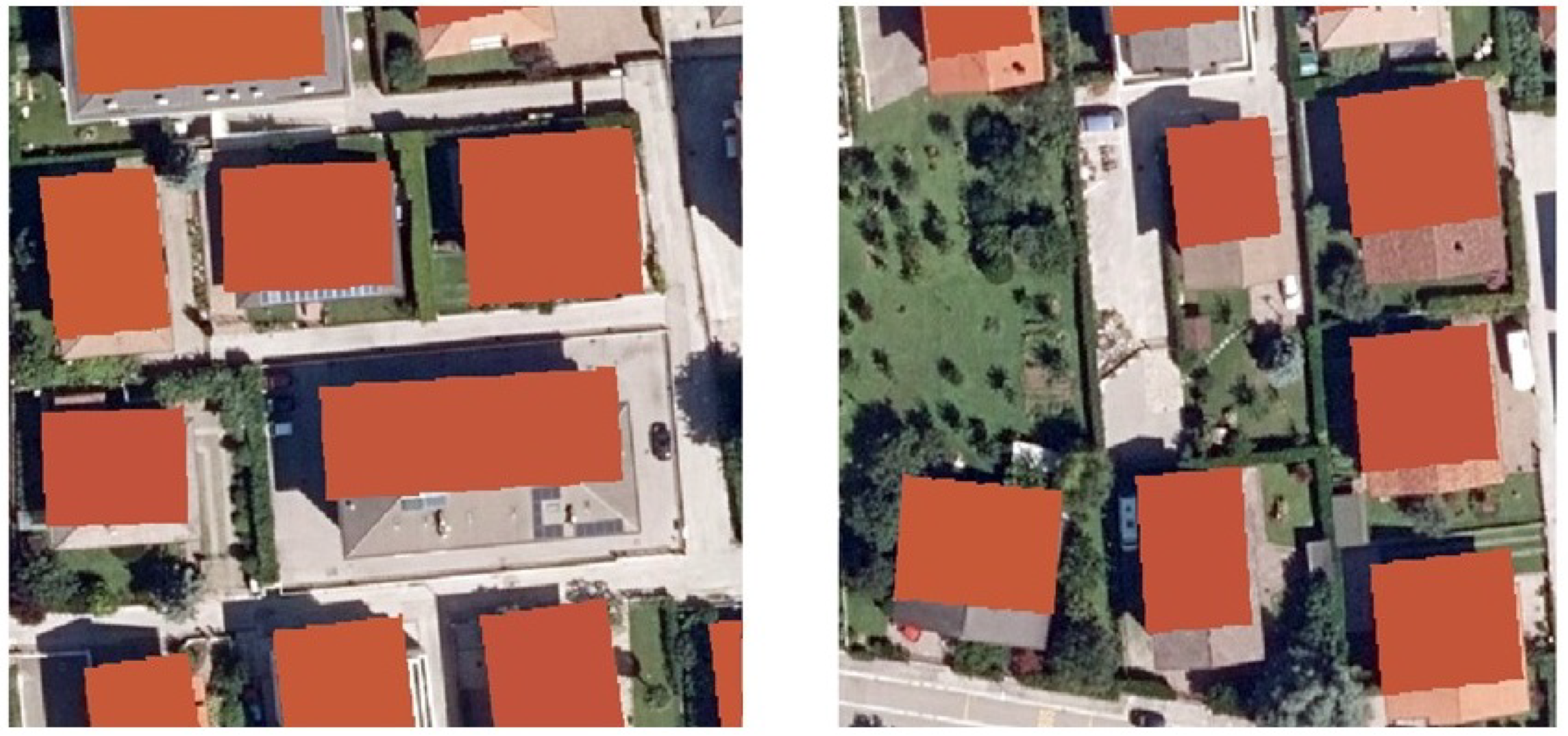
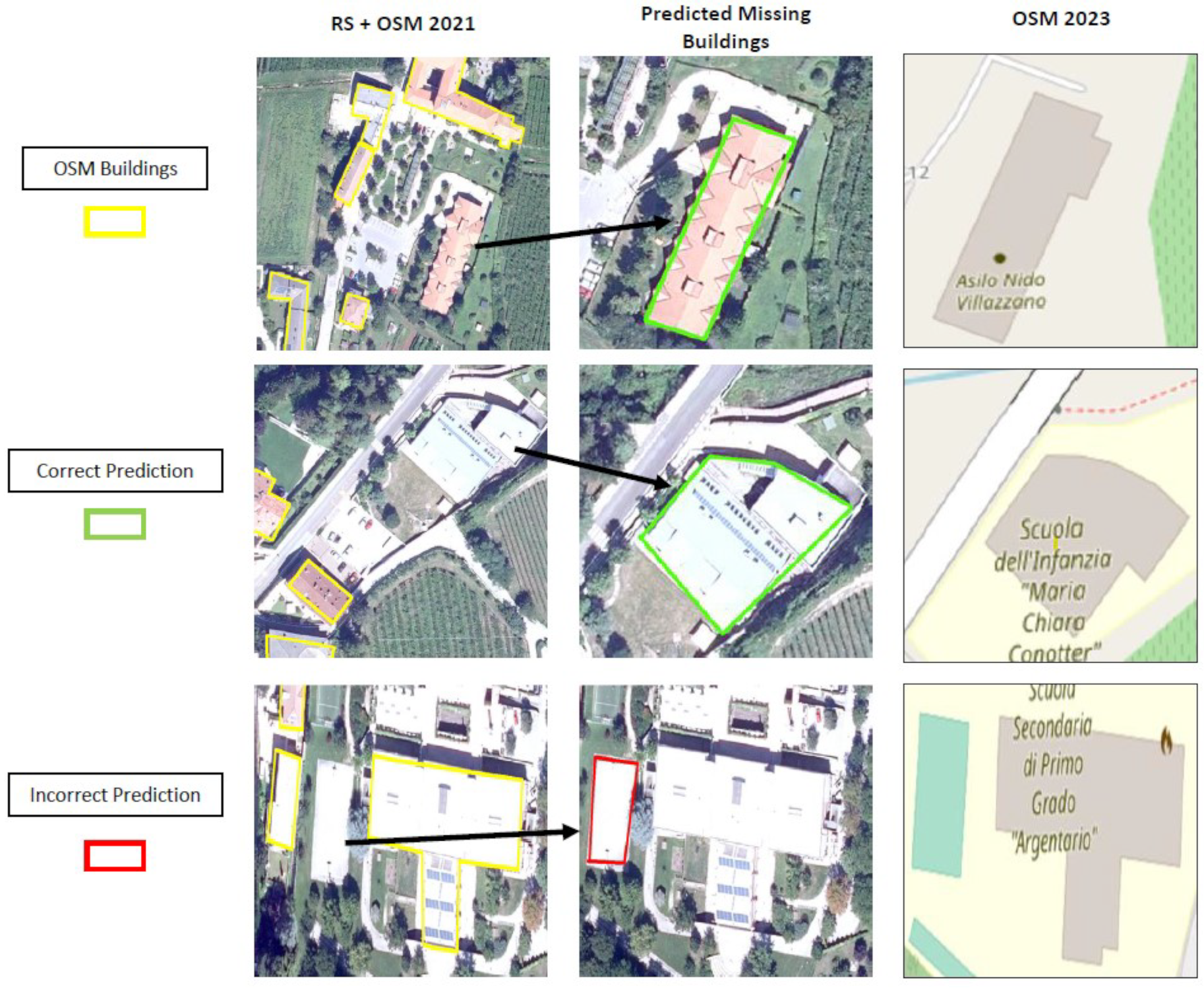
- Missing objects in the annotation dataset: occurs because they have not been noticed by the volunteers, or may have been constructed in the time between the data acquisition. This ambiguity in the labels is known as omission noise (see Figure 2).
- Objects may also remain in annotation when they do not exist at present, like buildings destroyed in natural disasters.
2. Background: Reducing OSM Noise Using Remote Sensing or Deep Learning
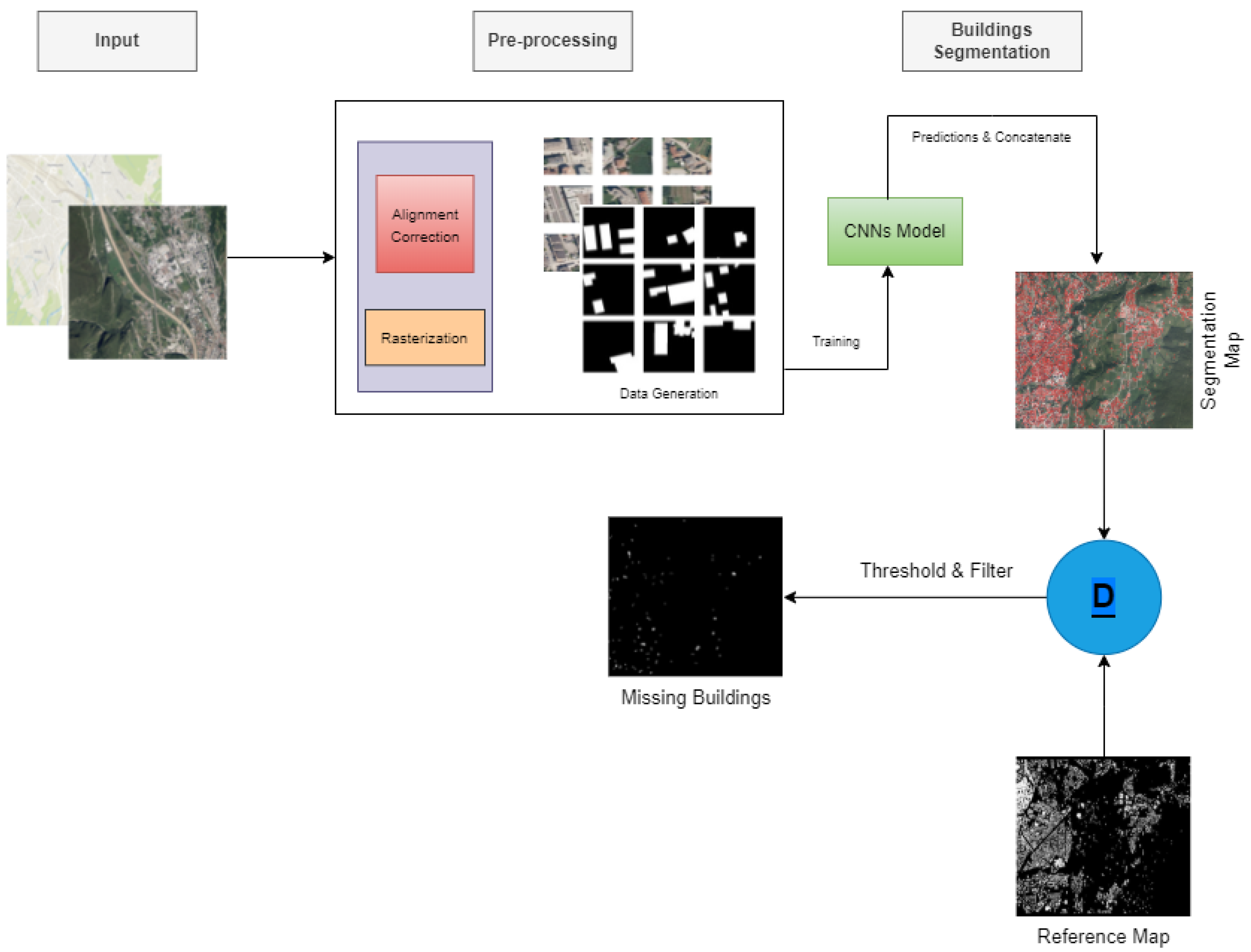
3. Proposed Methodology
3.1. Pre-Processing
3.2. Deep Learning Approach
4. Experimental Analysis
4.1. Dataset
4.2. Experimental Setup
5. Results and Comparison
5.1. Missing Building Case
5.2. Change Detection Case
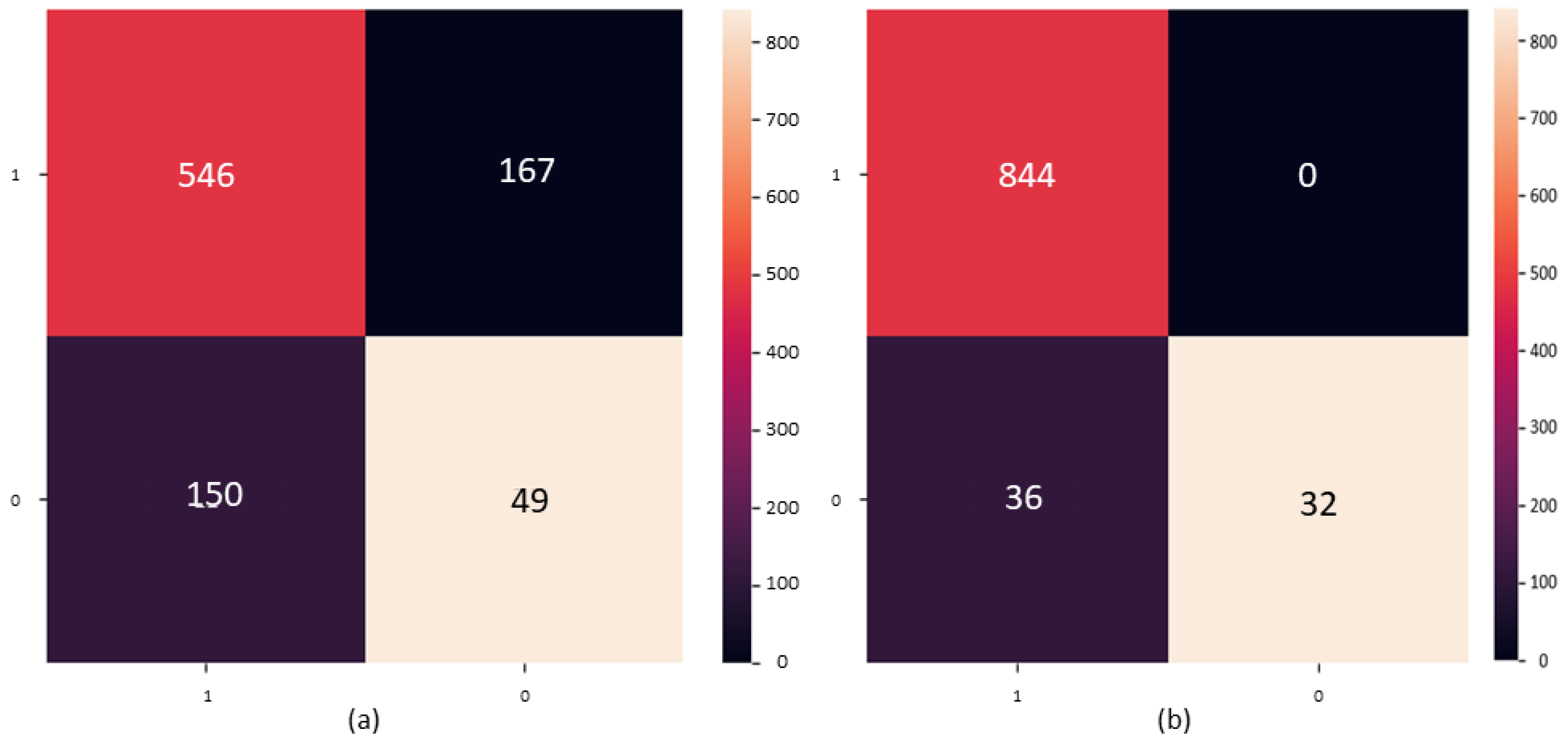
- The registration noise is handled by the CCR approach in Section 3, and Mask R-CNN achieves better performance with a quality improved dataset in building extraction than using noisy OSM with VHR images.
- The omission noise is mitigated and described in Section 5.1, and the results promote the use of VHR-updated imagery to highlight the missing objects in OSM.
- The updated mapping issue is described in Section 5.2, which leads to the change detection analysis of an area. We perform a case study on the Beirut area for change detection mapping, where an explosion occurred on 4 August 2020. The results show that this approach mitigated the problem of updated mapping and proposed a new aspect of change detection and OSM quality.
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
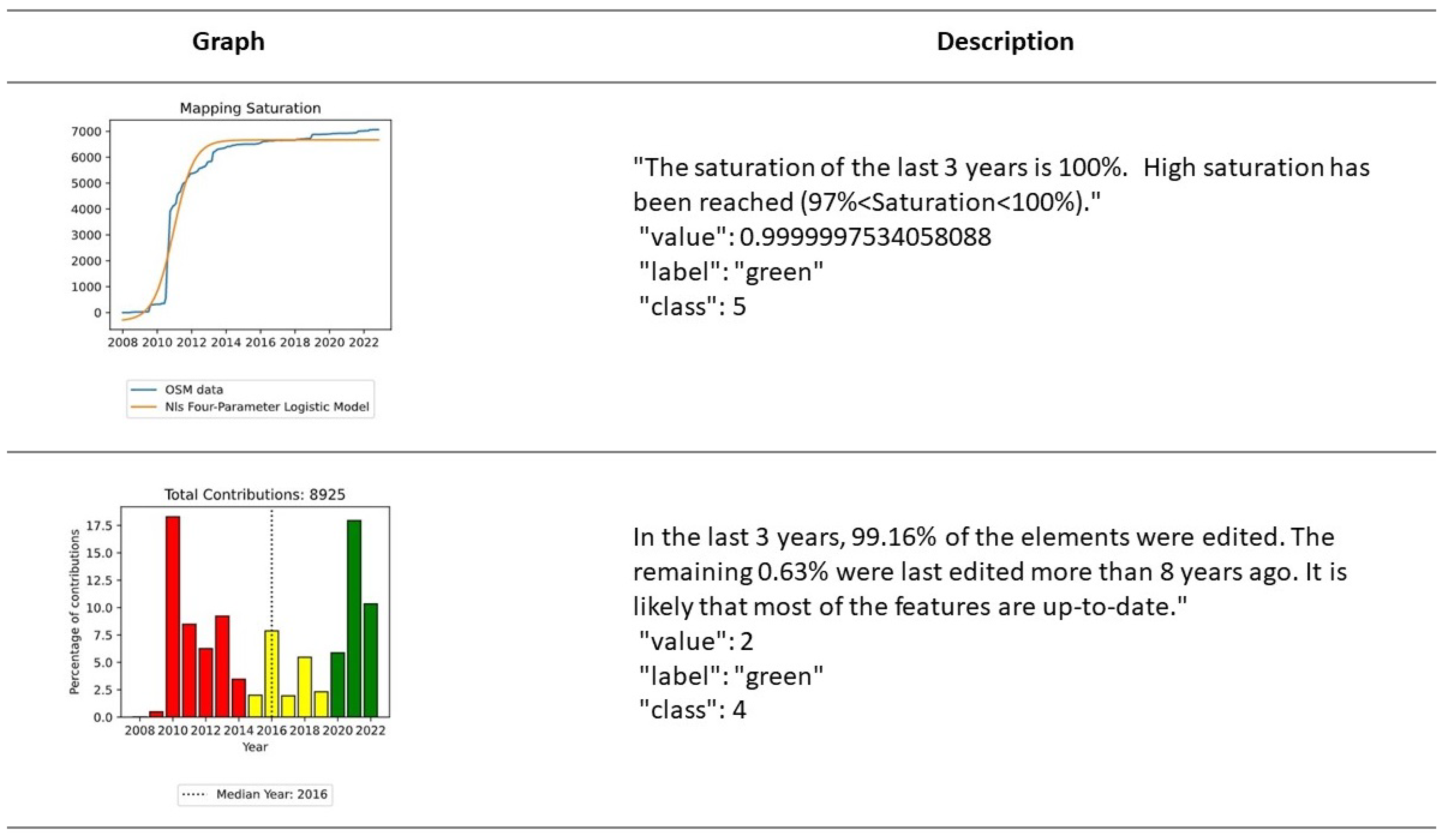
Appendix A. Ohsome Quality Analyst
References
- Horita, F.E.A.; Degrossi, L.C.; de Assis, L.F.G.; Zipf, A.; de Albuquerque, J.P. The use of volunteered geographic information (VGI) and crowdsourcing in disaster management: A systematic literature review. In Proceedings of the Nineteenth Americas Conference on Information Systems, Chicago, IL, USA, 15–17 August 2013. [Google Scholar]
- Goodchild, M.F. Citizens as voluntary sensors: Spatial data infrastructure in the world of Web 2.0. Int. J. Spat. Data Infrastruct. Res. 2007, 2, 24–32. [Google Scholar]
- Poorazizi, M.E.; Hunter, A.J.; Steiniger, S. A volunteered geographic information framework to enable bottom-up disaster management platforms. ISPRS Int. J. Geo-Inf. 2015, 4, 1389–1422. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, W.; Deng, C.; Nie, N.; Yi, L. Volunteered geographic information for disaster management with application to earthquake disaster databank & sharing platform. Iop Conf. Ser. Earth Environ. Sci. 2017, 57, 012015. [Google Scholar]
- Mirbabaie, M.; Bunker, D.; Stieglitz, S.; Marx, J.; Ehnis, C. Social media in times of crisis: Learning from Hurricane Harvey for the coronavirus disease 2019 pandemic response. J. Inf. Technol. 2020, 35, 195–213. [Google Scholar] [CrossRef]
- Goldblatt, R.; Jones, N.; Mannix, J. Assessing OpenStreetMap completeness for management of natural disaster by means of remote sensing: A case study of three small island states (Haiti, Dominica and St. Lucia). Remote Sens. 2020, 12, 118. [Google Scholar] [CrossRef]
- Barrington-Leigh, C.; Millard-Ball, A. Correction: The world’s user-generated road map is more than 80% complete. PLoS ONE 2019, 14, e0224742. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhang, Y.; Chang, K.; Brovelli, M.A. Assessing OSM building completeness for almost 13,000 cities globally. Int. J. Digit. Earth 2022, 15, 2400–2421. [Google Scholar] [CrossRef]
- Barron, C.; Neis, P.; Zipf, A. A comprehensive framework for intrinsic OpenStreetMap quality analysis. Trans. GIS 2014, 18, 877–895. [Google Scholar] [CrossRef]
- Basiri, A.; Jackson, M.; Amirian, P.; Pourabdollah, A.; Sester, M.; Winstanley, A.; Moore, T.; Zhang, L. Quality assessment of OpenStreetMap data using trajectory mining. Geo-Spat. Inf. Sci. 2016, 19, 56–68. [Google Scholar] [CrossRef]
- Hecht, R.; Kunze, C.; Hahmann, S. Measuring completeness of building footprints in OpenStreetMap over space and time. ISPRS Int. J. Geo-Inf. 2013, 2, 1066–1091. [Google Scholar] [CrossRef]
- Törnros, T.; Dorn, H.; Hahmann, S.; Zipf, A. Uncertainties of completeness measures in OpenStreetMap–A case study for buildings in a medium-sized German city. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 2, 353. [Google Scholar] [CrossRef]
- Senaratne, H.; Mobasheri, A.; Ali, A.L.; Capineri, C.; Haklay, M. A review of volunteered geographic information quality assessment methods. Int. J. Geogr. Inf. Sci. 2017, 31, 139–167. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, X.; Huang, B.; Li, P. A pixel shape index coupled with spectral information for classification of high spatial resolution remotely sensed imagery. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2950–2961. [Google Scholar] [CrossRef]
- Iglovikov, V.; Seferbekov, S.; Buslaev, A.; Shvets, A. Ternausnetv2: Fully convolutional network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 233–237. [Google Scholar] [CrossRef]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep learning in remote sensing: A comprehensive review and list of resources. IEEE Geosci. Remote. Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef]
- See, L.; Mooney, P.; Foody, G.; Bastin, L.; Comber, A.; Estima, J.; Fritz, S.; Kerle, N.; Jiang, B.; Laakso, M.; et al. Crowdsourcing, citizen science or volunteered geographic information? The current state of crowdsourced geographic information. ISPRS Int. J. Geo-Inf. 2016, 5, 55. [Google Scholar] [CrossRef]
- Herfort, B.; Li, H.; Fendrich, S.; Lautenbach, S.; Zipf, A. Mapping human settlements with higher accuracy and less volunteer efforts by combining crowdsourcing and deep learning. Remote Sens. 2019, 11, 1799. [Google Scholar] [CrossRef]
- Anderson, J.; Sarkar, D.; Palen, L. Corporate editors in the evolving landscape of OpenStreetMap. ISPRS Int. J. Geo-Inf. 2019, 8, 232. [Google Scholar] [CrossRef]
- Li, Q.; Shi, Y.; Huang, X.; Zhu, X.X. Building footprint generation by integrating convolution neural network with feature pairwise conditional random field (FPCRF). IEEE Trans. Geosci. Remote Sens. 2020, 58, 7502–7519. [Google Scholar] [CrossRef]
- Maggiori, E.; Tarabalka, Y.; Charpiat, G.; Alliez, P. Convolutional neural networks for large-scale remote-sensing image classification. IEEE Trans. Geosci. Remote Sens. 2016, 55, 645–657. [Google Scholar] [CrossRef]
- Marcos, D.; Tuia, D.; Kellenberger, B.; Zhang, L.; Bai, M.; Liao, R.; Urtasun, R. Learning deep structured active contours end-to-end. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8877–8885. [Google Scholar]
- Jilani, M.; Corcoran, P.; Bertolotto, M. Probabilistic graphical modelling for semantic labelling of crowdsourced map data. In Intelligent Systems Technologies and Applications: Volume 2; Springer: Berlin/Heidelberg, Germany, 2016; pp. 213–224. [Google Scholar]
- Fleischmann, P.; Pfister, T.; Oswald, M.; Berns, K. Using openstreetmap for autonomous mobile robot navigation. In Intelligent Autonomous Systems 14: Proceedings of the 14th International Conference IAS-14 14; Springer: Berlin/Heidelberg, Germany, 2017; pp. 883–895. [Google Scholar]
- Wang, Z.; Zipf, A. Using openstreetmap data to generate building models with their inner structures for 3d maps. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2017, 4, 411. [Google Scholar] [CrossRef]
- Bittner, K.; Cui, S.; Reinartz, P. Building extraction from remote sensing data using fully convolutional networks. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2017, 42, 481–486. [Google Scholar] [CrossRef]
- Mnih, V.; Hinton, G.E. Learning to label aerial images from noisy data. In Proceedings of the 29th International Conference on Machine Learning (ICML-12), Edinburgh, UK, 26 June–1 July 2012; pp. 567–574. [Google Scholar]
- Maggiori, E.; Tarabalka, Y.; Charpiat, G.; Alliez, P. Can semantic labeling methods generalize to any city? the inria aerial image labeling benchmark. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 3226–3229. [Google Scholar]
- Kaiser, P.; Wegner, J.D.; Lucchi, A.; Jaggi, M.; Hofmann, T.; Schindler, K. Learning aerial image segmentation from online maps. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6054–6068. [Google Scholar] [CrossRef]
- Li, H.; Herfort, B.; Huang, W.; Zia, M.; Zipf, A. Exploration of OpenStreetMap missing built-up areas using twitter hierarchical clustering and deep learning in Mozambique. ISPRS J. Photogramm. Remote Sens. 2020, 166, 41–51. [Google Scholar] [CrossRef]
- Cui, K.; Fu, P.; Li, Y.; Lin, Y. Bayesian fully convolutional networks for brain image registration. J. Healthc. Eng. 2021, 2021, 5528160. [Google Scholar] [CrossRef] [PubMed]
- Glocker, B.; Sotiras, A.; Komodakis, N.; Paragios, N. Deformable medical image registration: Setting the state of the art with discrete methods. Annu. Rev. Biomed. Eng. 2011, 13, 219–244. [Google Scholar] [CrossRef] [PubMed]
- Marcos, D.; Hamid, R.; Tuia, D. Geospatial correspondences for multimodal registration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 5091–5100. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 1137–1149. [Google Scholar] [CrossRef]
- Iglovikov, V.; Mushinskiy, S.; Osin, V. Satellite imagery feature detection using deep convolutional neural network: A kaggle competition. arXiv 2017, arXiv:1706.06169. [Google Scholar]
- Zhao, K.; Kang, J.; Jung, J.; Sohn, G. Building extraction from satellite images using mask R-CNN with building boundary regularization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–23 June 2018; pp. 247–251. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Herfort, B.; Troilo, R. Analyzing changes in OSM over time - full history access to OSM data through the ohsome framework. In Proceedings of the Talk at the State of the Map Conference 2022, Florence, Italy, 19–21 August 2022. [Google Scholar]
- El Sayed, M.J. Beirut ammonium nitrate explosion: A man-made disaster in times of the COVID-19 pandemic. Disaster Med. Public Health Prep. 2022, 16, 1203–1207. [Google Scholar] [CrossRef]
- Li, H.; Herfort, B.; Lautenbach, S.; Chen, J.; Zipf, A. Improving OpenStreetMap missing building detection using few-shot transfer learning in sub-Saharan Africa. Trans. GIS 2022, 26, 3125–3146. [Google Scholar] [CrossRef]
- Mooney, P.; Galvan, E. What has machine learning ever done for us? In Proceedings of the Academic Track at the State of the Map 2021, Online, 9–11 July 2011. [Google Scholar] [CrossRef]
- Huck, J.J.; Perkins, C.; Haworth, B.T.; Moro, E.B.; Nirmalan, M. Centaur VGI: A hybrid human–machine approach to address global inequalities in map coverage. Ann. Am. Assoc. Geogr. 2021, 111, 231–251. [Google Scholar] [CrossRef]
- Herfort, B.; Lautenbach, S.; Porto de Albuquerque, J.; Anderson, J.; Zipf, A. A spatio-temporal analysis investigating completeness and inequalities of global urban building data in OpenStreetMap. Nat. Commun. 2023, 14, 3985. [Google Scholar] [CrossRef] [PubMed]
- Viana, C.M.; Encalada, L.; Rocha, J. The value of OpenStreetMap historical contributions as a source of sampling data for multi-temporal land use/cover maps. ISPRS Int. J. Geo-Inf. 2019, 8, 116. [Google Scholar] [CrossRef]
- Brinkhoff, T. Open street map data as source for built-up and urban areas on global scale. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 557. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mask R-CNN (Proposed) | Precision | Recall | F1 Score | mAP | OA |
|---|---|---|---|---|---|
| (a) With Noisy OSM | 0.76 | 0.77 | 0.76 | 0.60 | 0.62 |
| (b) With Processed OSM | 0.96 | 0.96 | 0.96 | 0.76 | 0.93 |
| FCN Approach (Comparison) | 0.85 | 0.77 | 0.83 | 0.80 | 0.87 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Usmani, M.; Bovolo, F.; Napolitano, M. Remote Sensing and Deep Learning to Understand Noisy OpenStreetMap. Remote Sens. 2023, 15, 4639. https://doi.org/10.3390/rs15184639
Usmani M, Bovolo F, Napolitano M. Remote Sensing and Deep Learning to Understand Noisy OpenStreetMap. Remote Sensing. 2023; 15(18):4639. https://doi.org/10.3390/rs15184639
Chicago/Turabian StyleUsmani, Munazza, Francesca Bovolo, and Maurizio Napolitano. 2023. "Remote Sensing and Deep Learning to Understand Noisy OpenStreetMap" Remote Sensing 15, no. 18: 4639. https://doi.org/10.3390/rs15184639
APA StyleUsmani, M., Bovolo, F., & Napolitano, M. (2023). Remote Sensing and Deep Learning to Understand Noisy OpenStreetMap. Remote Sensing, 15(18), 4639. https://doi.org/10.3390/rs15184639