
A Downscaling–Merging Scheme for Monthly Precipitation Estimation with High Resolution Based on CBAM-ConvLSTM


Abstract
:1. Introduction
2. Study Area and Data Source
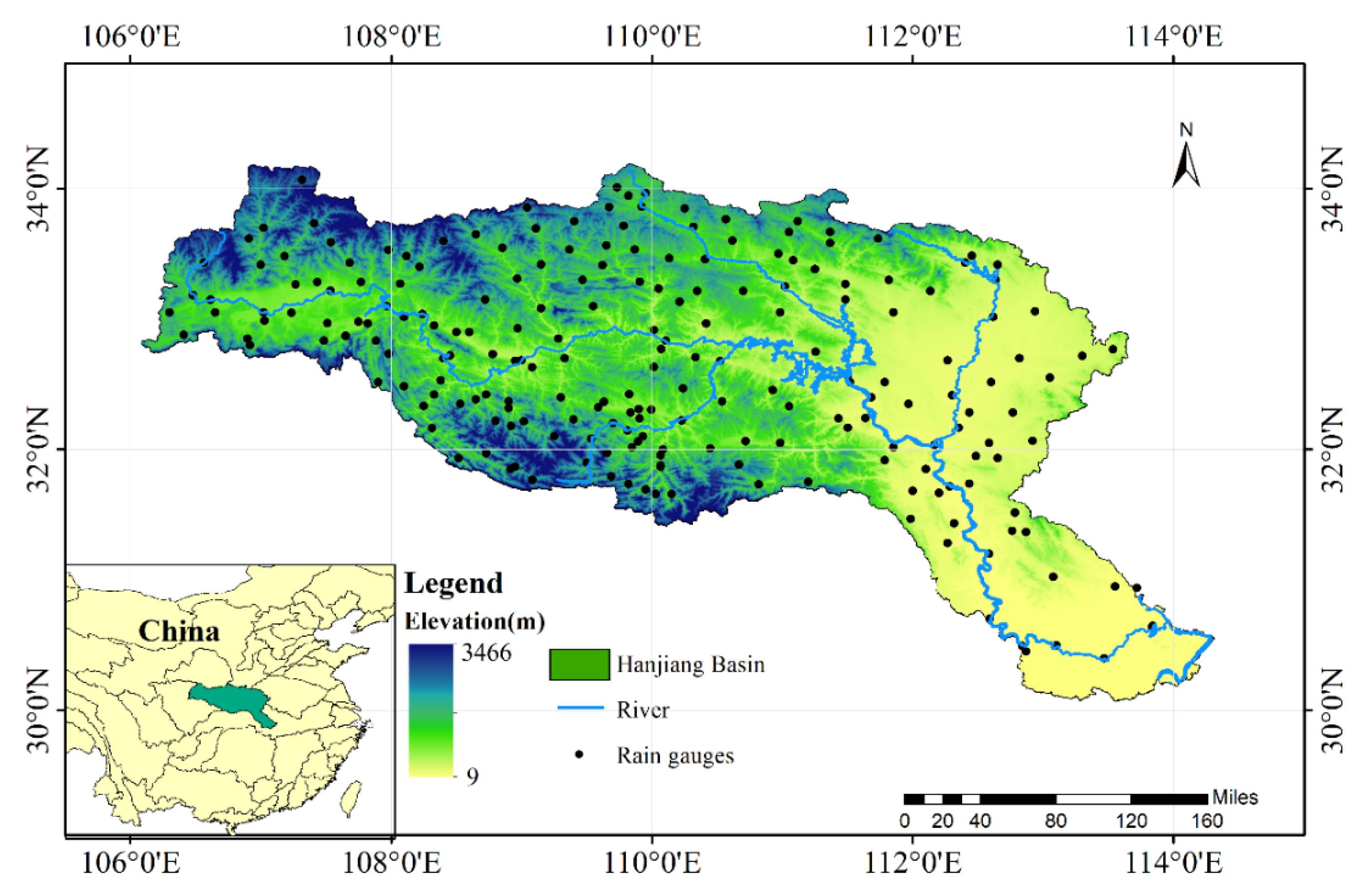
2.1. Study Area
2.2. Datasets
3. Methodology
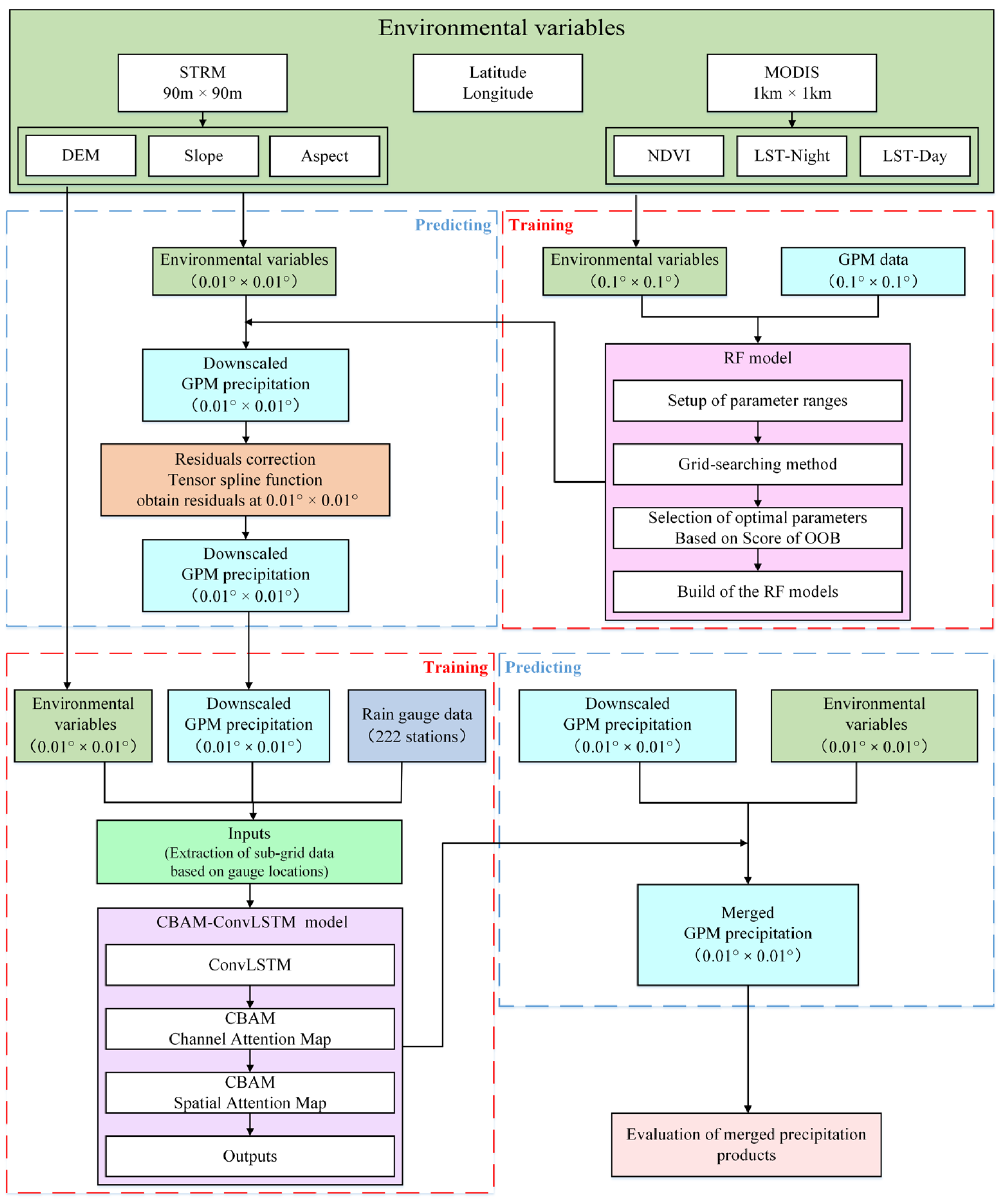
3.1. Downscaling of GPM Based on RF
- Data processing: To maintain consistency with the resolution of GPM precipitation data, selected environmental variables (nighttime and daytime LST, NDVI, topographic data including DEM, slope and aspect) were resampled to a spatial resolution of 0.01° × 0.01° and 0.1° × 0.1° by bilinear interpolation. Based on the climatic characteristics of the Hanjiang River Basin, twelve months were equally divided into four seasons, of which March is the beginning of spring. Precipitation (GPM and in situ observation daily data) and environmental variables (nighttime and daytime LST, NDVI) were accumulated into seasonal data.
- Downscaling model construction: Separated RF models were developed for different seasons and were, respectively, trained by seasonal GPM precipitation, geographical location (latitude and longitude), NDVI, LST, and the terrain feature dataset (DEM, slope and aspect) at 0.1° × 0.1° spatial resolution. The 0.01° × 0.01° environmental variables were fed into the developed regression model to obtain seasonal GPM precipitation with 0.01° × 0.01°.
- Residuals’ correction: Model residuals were calculated and then interpolated using a tensor spline function to obtain residuals at 0.01° × 0.01°. The residuals were consequently used to correct for downscaled precipitation results.
- Seasonal GPM precipitation decomposition: The high-spatial-resolution GPM precipitation was decomposed based on the ratio of month to season data, with the hypothesis that the ratio remains constant [42].
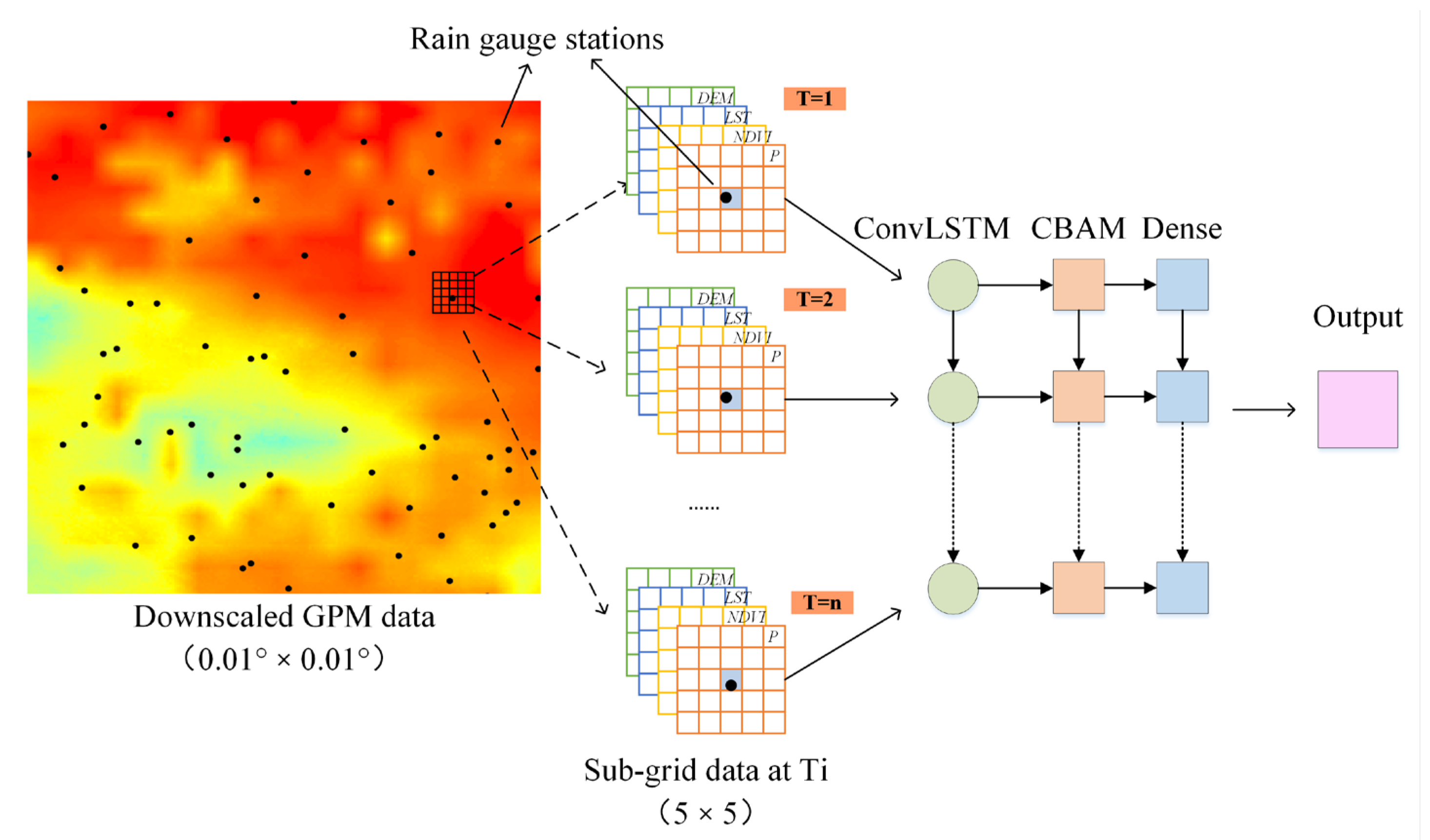
3.2. Merging of GPM and Gauge Observations Based on ConvLSTM and CBAM
- All input datasets including in situ precipitation observations, downscaled GPM data and surface environmental variables (NDVI, LST, DEM) were normalized.
- The 5 × 5 sub-grids were extracted from the satellite grid to represent the spatial distribution of precipitation at the current rain gauge, centered on the nearest grid of 222 rain gauges.
- The training data corresponding to the satellite grid data and ground observation data in time and space were established. The image size of input variables is 5 × 5 × 5 × 5 (image size is 5 × 5, number of channels is 5). A time step (T) of 5 and a kernel of 3 × 3 were chosen. The epoch and learning rate of the established CBAM-ConvLSTM network were 100 and 0.001, respectively. The number of units in ConvLSTM was set to 8. To avoid overfitting, a regularization method (Dropout, parameter set to 0.25) was applied. Dense represents a fully connected layer, followed by the number of convolution kernels, with ‘elu’ as the activation function. The fused precipitation over the entire study area was obtained by feeding grid data into the fusion model to obtain precipitation at each grid point location.
- The model performance was evaluated using 10-fold cross-validation, dividing the 222 rain gauges into 10 parts, each of which will be tested. The mean of all tested rain gauges was used as the assessment result.
3.3. Evaluation Criteria
4. Results
4.1. Performance of RF-Based Downscaling Models
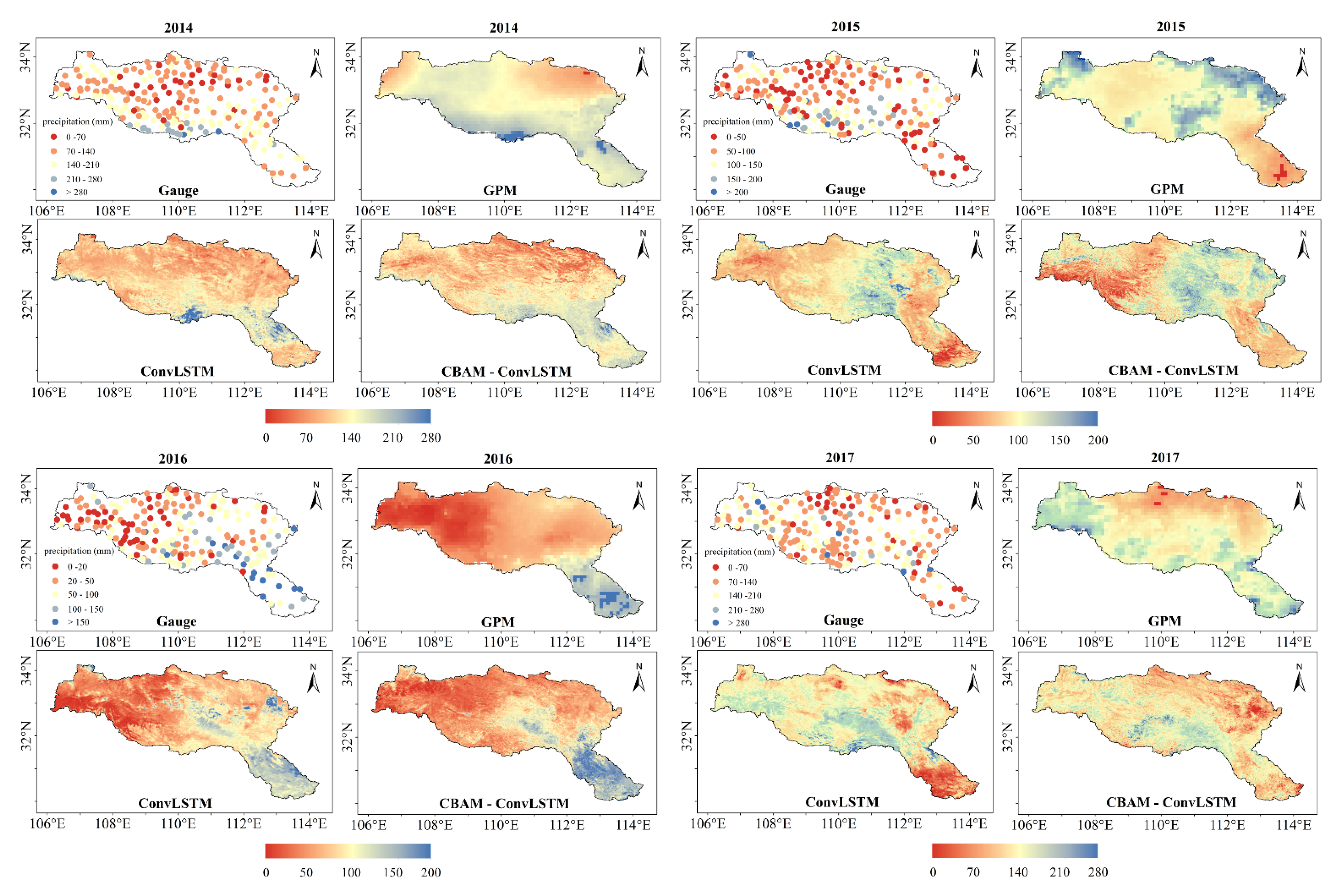
4.2. Performances of Merged Precipitation Products
4.3. Accuracy Assessment of Merged Precipitation Product
5. Discussion
6. Conclusions
- The downscaling algorithm based on RF models significantly refined the spatial resolution of GPM precipitation and maintains a moderate accuracy. Due to the improved spatial resolution, the spatial mismatch between downscaled precipitation data and rain gauge data is reduced, which improves its consistency with in situ observations. This reduces the error and provides a good basis for subsequent precipitation data fusion.
- Considering the spatiotemporal relation between ground-based observations and satellite-based precipitation, a fusion model introducing ConvLSTM for merged precipitation data was proposed. The accuracy of the fused GPM is evaluated and the assessment results reveal that the accuracy of GPM is significantly improved after GPM data are fused with in situ observations. Compared with the original GPM, RMSE and MAE of the fused precipitation products were down by 19.9% and 17.9%, respectively. The bias was reduced to within 6%, and the CC and KGE were improved from 0.55 and 0.28 to 0.62 and 0.42, respectively.
- The performance of the fused precipitation product was further enhanced with the introduction of the CBAM module. Compared to the original GPM, the RMSE of the fused precipitation product with the addition of the attention mechanism were reduced by 31% and the MAE of those decreased by 27.8%, respectively. Compared with ConvLSTM, the bias was reduced to within 2%, and the CC increased to 0.69 and the KGE rose to 0.52.
- The downscaling step mitigates the bias problem caused by discontinuous precipitation background fields and provides the foundation for the fusion step. The monthly precipitation products achieved by the scheme maintained the original spatial information of the satellite data and significantly refined the spatial detail, portraying a continuous and accurate distribution of the satellite precipitation data. The improvement was particularly noticeable for areas of uneven precipitation distribution.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Del Jesus, M.; Rinaldo, A.; Rodríguez-Iturbe, I. Point rainfall statistics for ecohydrological analyses derived from satellite integrated rainfall measurements. Water Resour. Res. 2015, 51, 2974–2985. [Google Scholar] [CrossRef]
- Baez-Villanueva, O.M.; Zambrano-Bigiarini, M.; Beck, H.E.; McNamara, I.; Ribbe, L.; Nauditt, A.; Birkel, C.; Verbist, K.; Giraldo-Osorio, J.D.; Thinh, N.X. RF-MEP: A novel Random Forest method for merging gridded precipitation products and ground-based measurements. Remote Sens. Environ. 2020, 239, 111606. [Google Scholar] [CrossRef]
- Long, Y.P.; Zhang, Y.N.; Ma, Q.M. A Merging Framework for Rainfall Estimation at High Spatiotemporal Resolution for Distributed Hydrological Modeling in a Data-Scarce Area. Remote Sens. 2016, 8, 599. [Google Scholar] [CrossRef]
- Song, Y.Q.; Liu, H.N.; Wang, X.Y.; Zhang, N.; Sun, J.N. Numerical simulation of the impact of urban non-uniformity on precipitation. Adv. Atmos. Sci. 2016, 33, 783–793. [Google Scholar] [CrossRef]
- Ibarra-Berastegi, G.; Saenz, J.; Ezcurra, A.; Elias, A.; Argandona, J.D.; Errasti, I. Downscaling of surface moisture flux and precipitation in the Ebro Valley (Spain) using analogues and analogues followed by random forests and multiple linear regression. Hydrol. Earth Syst. Sci. 2011, 15, 1895–1907. [Google Scholar] [CrossRef]
- Kyriakidis, P.C.; Miller, N.L.; Kim, J. Uncertainty Propagation of Regional Climate Model Precipitation Forecasts to Hydrologic Impact Assessment. J. Hydrometeorol. 2001, 2, 140–160. [Google Scholar] [CrossRef]
- Hou, A.Y.; Kakar, R.K.; Neeck, S.; Azarbarzin, A.A.; Kummerow, C.D.; Kojima, M.; Oki, R.; Nakamura, K.; Iguchi, T. The Global Precipitation Measurement Mission. Bull. Am. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J.; Wolff, D.B.; Adler, R.F.; Gu, G.; Hong, Y.; Bowman, K.P.; Stocker, E.F. The TRMM Multisatellite Precipitation Analysis (TMPA): Quasi-Global, Multiyear, Combined-Sensor Precipitation Estimates at Fine Scales. J. Hydrometeorol. 2007, 8, 38–55. [Google Scholar] [CrossRef]
- Tan, J.; Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J. IMERG V06: Changes to the Morphing Algorithm. J. Atmos. Ocean. Technol. 2019, 36, 2471–2482. [Google Scholar] [CrossRef]
- Kubota, T.; Shige, S.; Hashizurne, H.; Aonashi, K.; Takahashi, N.; Seto, S.; Hirose, M.; Takayabu, Y.N.; Ushio, T.; Nakagawa, K.; et al. Global precipitation map using satellite-borne microwave radiometers by the GSMaP project: Production and validation. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2259–2275. [Google Scholar] [CrossRef]
- Mugnai, A.; Casella, D.; Cattani, E.; Dietrich, S.; Laviola, S.; Levizzani, V.; Panegrossi, G.; Petracca, M.; Sanò, P.; Di Paola, F.; et al. Precipitation products from the hydrology SAF. Nat. Hazards Earth Syst. Sci. 2013, 13, 1959–1981. [Google Scholar] [CrossRef]
- Wu, H.; Yong, B.; Shen, Z. Research on the Monitoring Ability of Fengyun-Based Quantitative Precipitation Estimates for Capturing Heavy Precipitation: A Case Study of the “7·20” Rainstorm in Henan Province, China. Remote Sens. 2023, 15, 2726. [Google Scholar] [CrossRef]
- Shen, Y.; Xiong, A.; Wang, Y.; Xie, P. Performance of high-resolution satellite precipitation products over China. J. Geophys. Res. Atmos. 2010, 115, D02114. [Google Scholar] [CrossRef]
- Skofronick-Jackson, G.; Petersen, W.A.; Berg, W.; Kidd, C.; Stocker, E.F.; Kirschbaum, D.B.; Kakar, R.; Braun, S.A.; Huffman, G.J.; Iguchi, T.; et al. The Global Precipitation Measurement (GPM) Mission for Science and Society. Bull. Am. Meteorol. Soc. 2017, 98, 1679–1695. [Google Scholar] [CrossRef] [PubMed]
- Atkinson, P.M. Downscaling in remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2013, 22, 106–114. [Google Scholar] [CrossRef]
- Li, M.; Shao, Q. An improved statistical approach to merge satellite rainfall estimates and raingauge data. J. Hydrol. 2010, 385, 51–64. [Google Scholar] [CrossRef]
- Hu, Q.; Yang, D.; Li, Z.; Mishra, A.K.; Wang, Y.; Yang, H. Multi-scale evaluation of six high-resolution satellite monthly rainfall estimates over a humid region in China with dense rain gauges. Int. J. Remote Sens. 2014, 35, 1272–1294. [Google Scholar] [CrossRef]
- Hong, Y.; Gochis, D.; Cheng, J.-T.; Hsu, K.-L.; Sorooshian, S. Evaluation of PERSIANN-CCS Rainfall Measurement Using the NAME Event Rain Gauge Network. J. Hydrometeorol. 2007, 8, 469–482. [Google Scholar] [CrossRef]
- Duan, Z.; Bastiaanssen, W.G.M. First results from Version 7 TRMM 3B43 precipitation product in combination with a new downscaling–calibration procedure. Remote Sens. Environ. 2013, 131, 1–13. [Google Scholar] [CrossRef]
- Li, K.; Tian, F.; Khan, M.Y.A.; Xu, R.; He, Z.; Yang, L.; Lu, H.; Ma, Y. A high-accuracy rainfall dataset by merging multiple satellites and dense gauges over the southern Tibetan Plateau for 2014–2019 warm seasons. Earth Syst. Sci. Data 2021, 13, 5455–5467. [Google Scholar] [CrossRef]
- Chen, S.L.; Xiong, L.H.; Ma, Q.M.; Kim, J.S.; Chen, J.; Xu, C.Y. Improving daily spatial precipitation estimates by merging gauge observation with multiple satellite-based precipitation products based on the geographically weighted ridge regression method. J. Hydrol. 2020, 589, 125156. [Google Scholar] [CrossRef]
- Beck, H.E.; Wood, E.F.; Pan, M.; Fisher, C.K.; Miralles, D.G.; van Dijk, A.I.J.M.; McVicar, T.R.; Adler, R.F. MSWEP V2 Global 3-Hourly 0.1 degrees Precipitation: Methodology and Quantitative Assessment. Bull. Am. Meteorol. Soc. 2019, 100, 473–502. [Google Scholar] [CrossRef]
- Manz, B.; Buytaert, W.; Zulkafli, Z.; Lavado, W.; Willems, B.; Robles, L.A.; Rodriguez-Sanchez, J.P. High-resolution satellite-gauge merged precipitation climatologies of the Tropical Andes. J. Geophys. Res.-Atmos. 2016, 121, 1190–1207. [Google Scholar] [CrossRef]
- Chao, L.; Zhang, K.; Li, Z.; Zhu, Y.; Wang, J.; Yu, Z. Geographically weighted regression based methods for merging satellite and gauge precipitation. J. Hydrol. 2018, 558, 275–289. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Shi, Y.L.; Song, L.; Xia, Z.; Lin, Y.R.; Myneni, R.B.; Choi, S.H.; Wang, L.; Ni, X.L.; Lao, C.L.; Yang, F.K. Mapping Annual Precipitation across Mainland China in the Period 2001–2010 from TRMM3B43 Product Using Spatial Downscaling Approach. Remote Sens. 2015, 7, 5849–5878. [Google Scholar] [CrossRef]
- Jing, W.L.; Yang, Y.P.; Yue, X.F.; Zhao, X.D. A Spatial Downscaling Algorithm for Satellite-Based Precipitation over the Tibetan Plateau Based on NDVI, DEM, and Land Surface Temperature. Remote Sens. 2016, 8, 655. [Google Scholar] [CrossRef]
- Wu, H.; Yang, Q.; Liu, J.; Wang, G. A spatiotemporal deep fusion model for merging satellite and gauge precipitation in China. J. Hydrol. 2020, 584, 124664. [Google Scholar] [CrossRef]
- Shi, X.J.; Chen, Z.R.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. In Proceedings of the 29th Annual Conference on Neural Information Processing Systems (NIPS), Montreal, QC, Canada, 7–12 December 2015. [Google Scholar]
- Ni, L.; Wang, D.; Singh, V.P.; Wu, J.; Wang, Y.; Tao, Y.; Zhang, J. Streamflow and rainfall forecasting by two long short-term memory-based models. J. Hydrol. 2020, 583, 124296. [Google Scholar] [CrossRef]
- Chen, S.; Xu, X.; Zhang, Y.; Shao, D.; Zhang, S.; Zeng, M. Two-stream convolutional LSTM for precipitation nowcasting. Neural Comput. Appl. 2022, 34, 13281–13290. [Google Scholar] [CrossRef]
- Corbetta, M.; Shulman, G.L. Control of goal-directed and stimulus-driven attention in the brain. Nat. Rev. Neurosci. 2002, 3, 201–215. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Jiang, M.Q.; Qian, C.; Yang, S.; Li, C.; Zhang, H.G.; Wang, X.G.; Tang, X.O. Residual Attention Network for Image Classification. In Proceedings of the 30th IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6450–6458. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-Excitation Networks. In Proceedings of the 31st IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module; Springer International Publishing: Cham, Switzerland, 2018; pp. 3–19. [Google Scholar]
- Shen, J.M.; Liu, P.; Xia, J.; Zhao, Y.J.; Dong, Y. Merging Multisatellite and Gauge Precipitation Based on Geographically Weighted Regression and Long Short-Term Memory Network. Remote Sens. 2022, 14, 3939. [Google Scholar] [CrossRef]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef]
- Efron, B. 1977 Rietz Lecture—Bootstrap Methods—Another Look at the Jackknife. Ann. Stat. 1979, 7, 1–26. [Google Scholar]
- Catani, F.; Lagomarsino, D.; Segoni, S.; Tofani, V. Landslide susceptibility estimation by random forests technique: Sensitivity and scaling issues. Nat. Hazards Earth Syst. Sci. 2013, 13, 2815–2831. [Google Scholar] [CrossRef]
- Carlisle, D.M.; Falcone, J.; Wolock, D.M.; Meador, M.R.; Norris, R.H. Predicting the natural flow regime: Models for assessing hydrological alteration in streams. River Res. Appl. 2009, 26, 118–136. [Google Scholar] [CrossRef]
- Chaney, N.W.; Wood, E.F.; McBratney, A.B.; Hempel, J.W.; Nauman, T.W.; Brungard, C.W.; Odgers, N.P. POLARIS: A 30-meter probabilistic soil series map of the contiguous United States. Geoderma 2016, 274, 54–67. [Google Scholar] [CrossRef]
- Ma, Z.Q.; He, K.; Tan, X.; Xu, J.T.; Fang, W.Z.; He, Y.; Hong, Y. Comparisons of Spatially Downscaling TMPA and IMERG over the Tibetan Plateau. Remote Sens. 2018, 10, 1883. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Agga, A.; Abbou, A.; Labbadi, M.; El Houm, Y. Short-term self consumption PV plant power production forecasts based on hybrid CNN-LSTM, ConvLSTM models. Renew. Energy 2021, 177, 101–112. [Google Scholar] [CrossRef]
- Li, Q.; Wang, Z.; Shangguan, W.; Li, L.; Yao, Y.; Yu, F. Improved daily SMAP satellite soil moisture prediction over China using deep learning model with transfer learning. J. Hydrol. 2021, 600, 126698. [Google Scholar] [CrossRef]
- Moishin, M.; Deo, R.C.; Prasad, R.; Raj, N.; Abdulla, S. Designing Deep-Based Learning Flood Forecast Model With ConvLSTM Hybrid Algorithm. IEEE Access 2021, 9, 50982–50993. [Google Scholar] [CrossRef]
- Gupta, H.V.; Kling, H.; Yilmaz, K.K.; Martinez, G.F. Decomposition of the mean squared error and NSE performance criteria: Implications for improving hydrological modelling. J. Hydrol. 2009, 377, 80–91. [Google Scholar] [CrossRef]
- Zhan, C.S.; Han, J.; Hu, S.; Liu, L.M.Z.; Dong, Y.X. Spatial Downscaling of GPM Annual and Monthly Precipitation Using Regression-Based Algorithms in a Mountainous Area. Adv. Meteorol. 2018, 2018, 1506017. [Google Scholar] [CrossRef]
- Bryan, B.A.; Adams, J.M. Three-dimensional neurointerpolation of annual mean precipitation and temperature surfaces for China. Geogr. Anal. 2002, 34, 93–111. [Google Scholar] [CrossRef]
- Price, D.T.; McKenney, D.W.; Nalder, I.A.; Hutchinson, M.F.; Kesteven, J.L. A comparison of two statistical methods for spatial interpolation of Canadian monthly mean climate data. Agric. For. Meteorol. 2000, 101, 81–94. [Google Scholar] [CrossRef]
- Xu, S.G.; Wu, C.Y.; Wang, L.; Gonsamo, A.; Shen, Y.; Niu, Z. A new satellite-based monthly precipitation downscaling algorithm with non-stationary relationship between precipitation and land surface characteristics. Remote Sens. Environ. 2015, 162, 119–140. [Google Scholar] [CrossRef]
- Shen, Z.; Yong, B. Downscaling the GPM-based satellite precipitation retrievals using gradient boosting decision tree approach over Mainland China. J. Hydrol. 2021, 602, 126803. [Google Scholar] [CrossRef]
- Chen, Y.Y.; Huang, J.F.; Sheng, S.X.; Mansaray, L.R.; Liu, Z.X.; Wu, H.Y.; Wang, X.Z. A new downscaling-integration framework for high-resolution monthly precipitation estimates: Combining rain gauge observations, satellite-derived precipitation data and geographical ancillary data. Remote Sens. Environ. 2018, 214, 154–172. [Google Scholar] [CrossRef]
- Chen, F.R.; Gao, Y.Q.; Wang, Y.G.; Li, X. A downscaling-merging method for high-resolution daily precipitation estimation. J. Hydrol. 2020, 581, 124414. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Description | Spatial Resolution | Temporal Resolution | Source |
|---|---|---|---|---|
| GPM_IMERGE | V06 Final run | 0.1° | 0.5 hourly | https://pmm.nasa.gov/ (accessed on 14 September 2023) |
| NDVI | MOD13A3 | 1 km | Monthly | https://lpdaac.usgs.gov/ (accessed on 14 September 2023) |
| LST | MOD11A2 | 1 km | 8-day | https://lpdaac.usgs.gov/ (accessed on 14 September 2023) |
| DEM | SRTM | 90 m | - | http://www.resdc.cn/ (accessed on 14 September 2023) |
| RH | 17 meteorological stations | - | Daily | https://data.cma.cn/ (accessed on 14 September 2023) |
| T | - | Daily | https://data.cma.cn/ (accessed on 14 September 2023) | |
| In situ observations | 222 rain gauges | - | Daily | - |
| ID | Indicators | Abbreviation | Equation | Optimum |
|---|---|---|---|---|
| 1 | Mean error | ME | 0 | |
| 2 | Correlation coefficient | CC | 1 | |
| 3 | Relative bias | Bias | 0 | |
| 4 | Kling–Gupta efficiency | KGE | 1 | |
| 5 | Root mean square error | RMSE | 0 | |
| 6 | Mean absolute error | MAE | 0 |
| Metrics | Seasons | 2014 | 2015 | 2016 | 2017 |
|---|---|---|---|---|---|
| CC | Spring | 0.996 | 0.997 | 0.997 | 0.996 |
| Summer | 0.997 | 0.995 | 0.997 | 0.992 | |
| Autumn | 0.992 | 0.995 | 0.993 | 0.992 | |
| Winter | 0.997 | 0.997 | 0.997 | 0.996 | |
| RMSE (mm) | Spring | 21.06 | 21.01 | 27.8 | 30.43 |
| Summer | 30.95 | 30.31 | 46.59 | 38.9 | |
| Autumn | 28.05 | 17.24 | 19.05 | 37.66 | |
| Winter | 8.7 | 6.95 | 11.05 | 10.55 | |
| ME (mm) | Spring | 0.96 | 1.88 | 1.65 | 3.18 |
| Summer | 1.7 | 1.58 | 3.18 | 2.25 | |
| Autumn | 3.17 | 1.08 | 1.9 | 5.97 | |
| Winter | 0.13 | 0.52 | 0.2 | 0.5 |
| Data Type | ME (mm) | CC | Bias | KGE | RMSE (mm) | MAE (mm) |
|---|---|---|---|---|---|---|
| GPM | 14.13 | 0.55 | 24.94% | 0.28 | 38.13 | 28.21 |
| RF | 15.13 | 0.55 | 27.89% | 0.25 | 38.73 | 28.95 |
| ConvLSTM | −0.47 | 0.62 | 5.84% | 0.42 | 30.54 | 23.16 |
| CBAM-ConvLSTM | −4.05 | 0.69 | 1.79% | 0.52 | 26.30 | 20.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, B.; Chen, H.; Yan, X.; Sheng, S.; Lin, K. A Downscaling–Merging Scheme for Monthly Precipitation Estimation with High Resolution Based on CBAM-ConvLSTM. Remote Sens. 2023, 15, 4601. https://doi.org/10.3390/rs15184601
Tian B, Chen H, Yan X, Sheng S, Lin K. A Downscaling–Merging Scheme for Monthly Precipitation Estimation with High Resolution Based on CBAM-ConvLSTM. Remote Sensing. 2023; 15(18):4601. https://doi.org/10.3390/rs15184601
Chicago/Turabian StyleTian, Bingru, Hua Chen, Xin Yan, Sheng Sheng, and Kangling Lin. 2023. "A Downscaling–Merging Scheme for Monthly Precipitation Estimation with High Resolution Based on CBAM-ConvLSTM" Remote Sensing 15, no. 18: 4601. https://doi.org/10.3390/rs15184601
APA StyleTian, B., Chen, H., Yan, X., Sheng, S., & Lin, K. (2023). A Downscaling–Merging Scheme for Monthly Precipitation Estimation with High Resolution Based on CBAM-ConvLSTM. Remote Sensing, 15(18), 4601. https://doi.org/10.3390/rs15184601