
An Adaptive Modeling-Based Aeromagnetic Maneuver Noise Suppression Method and Its Application in Mine Detection


Abstract
:1. Introduction
2. Compensation Model and Method
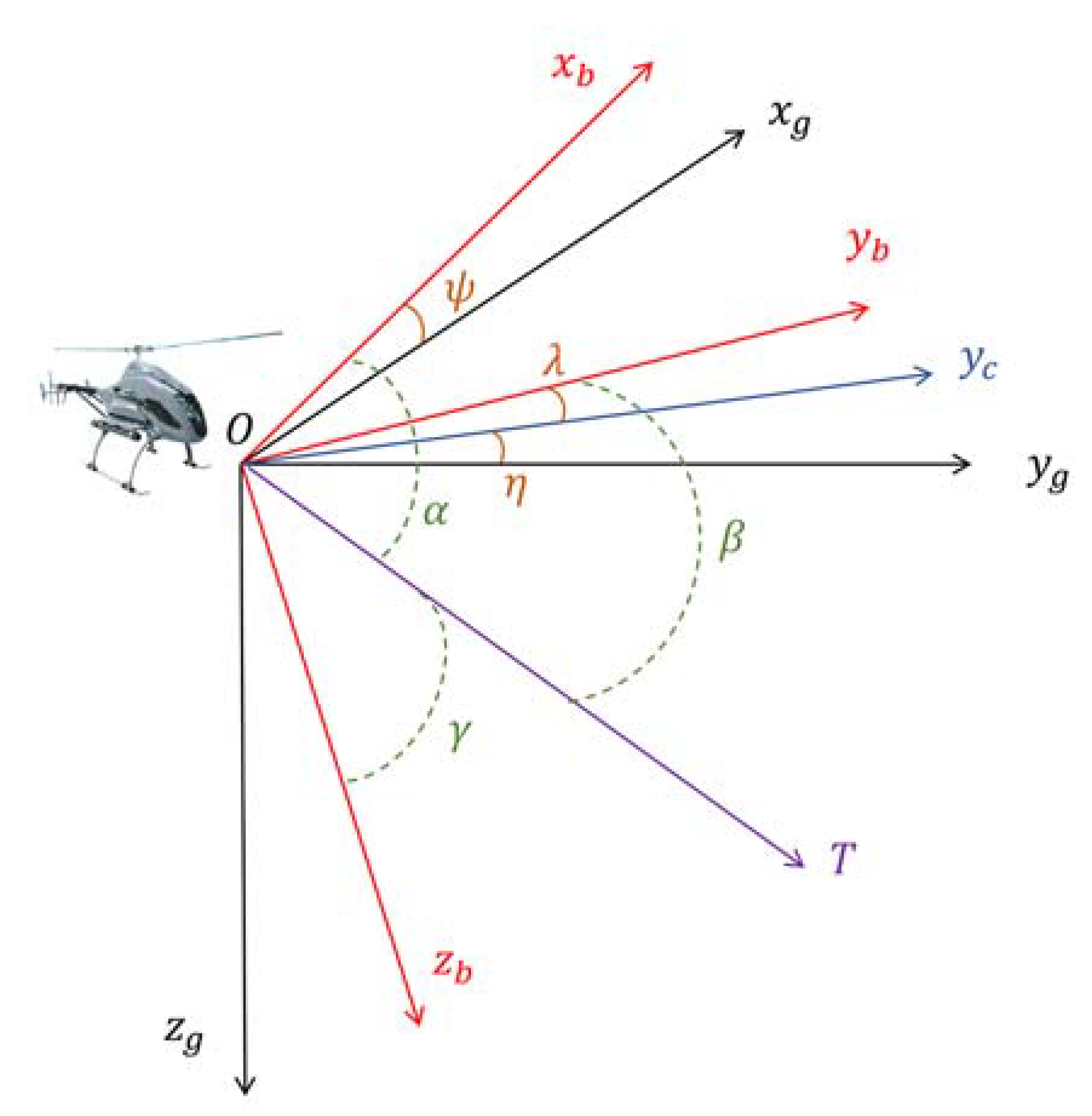
2.1. T-L Model
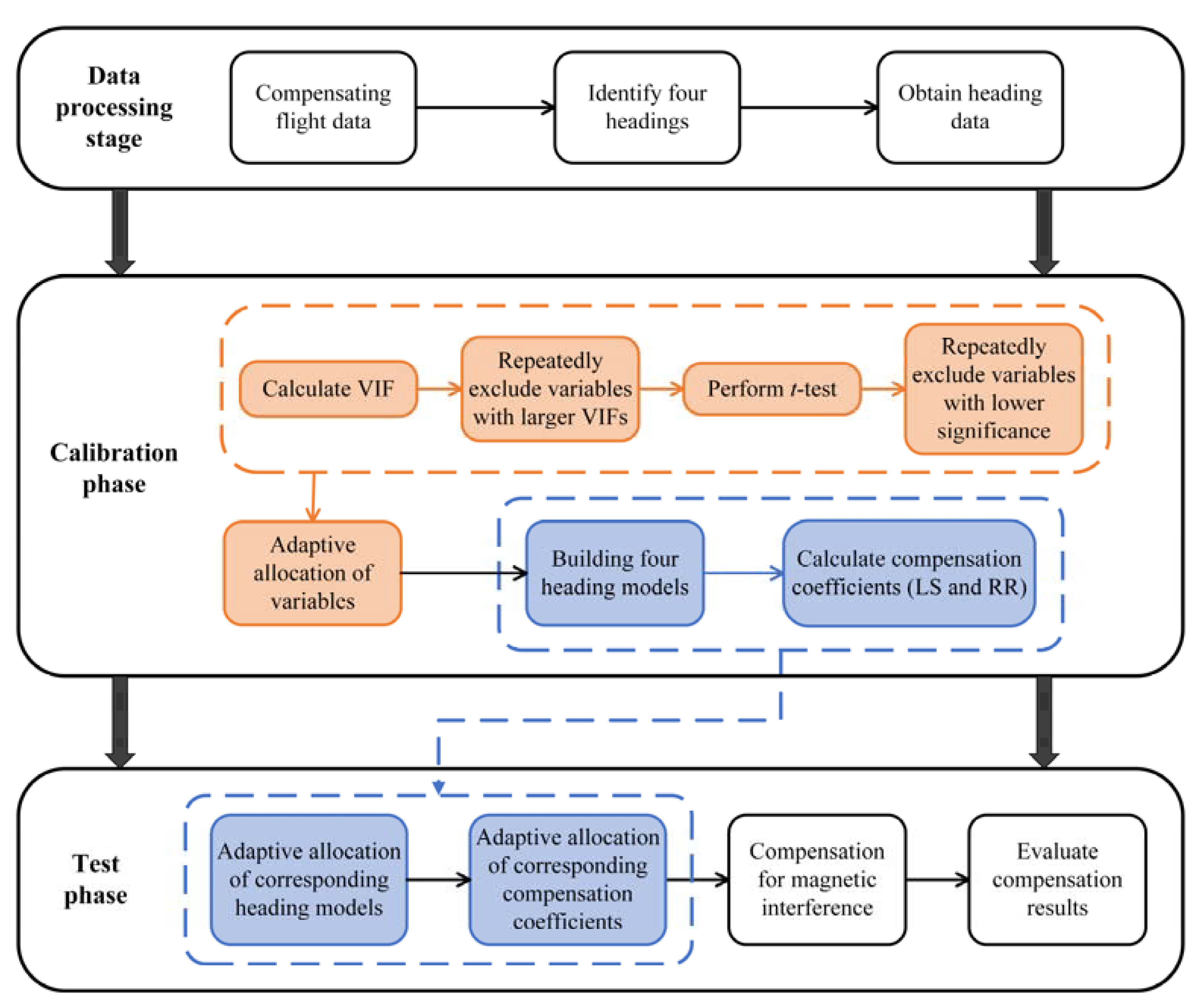
2.2. Adaptive Compensation Method
3. Compensation Flight Experiment
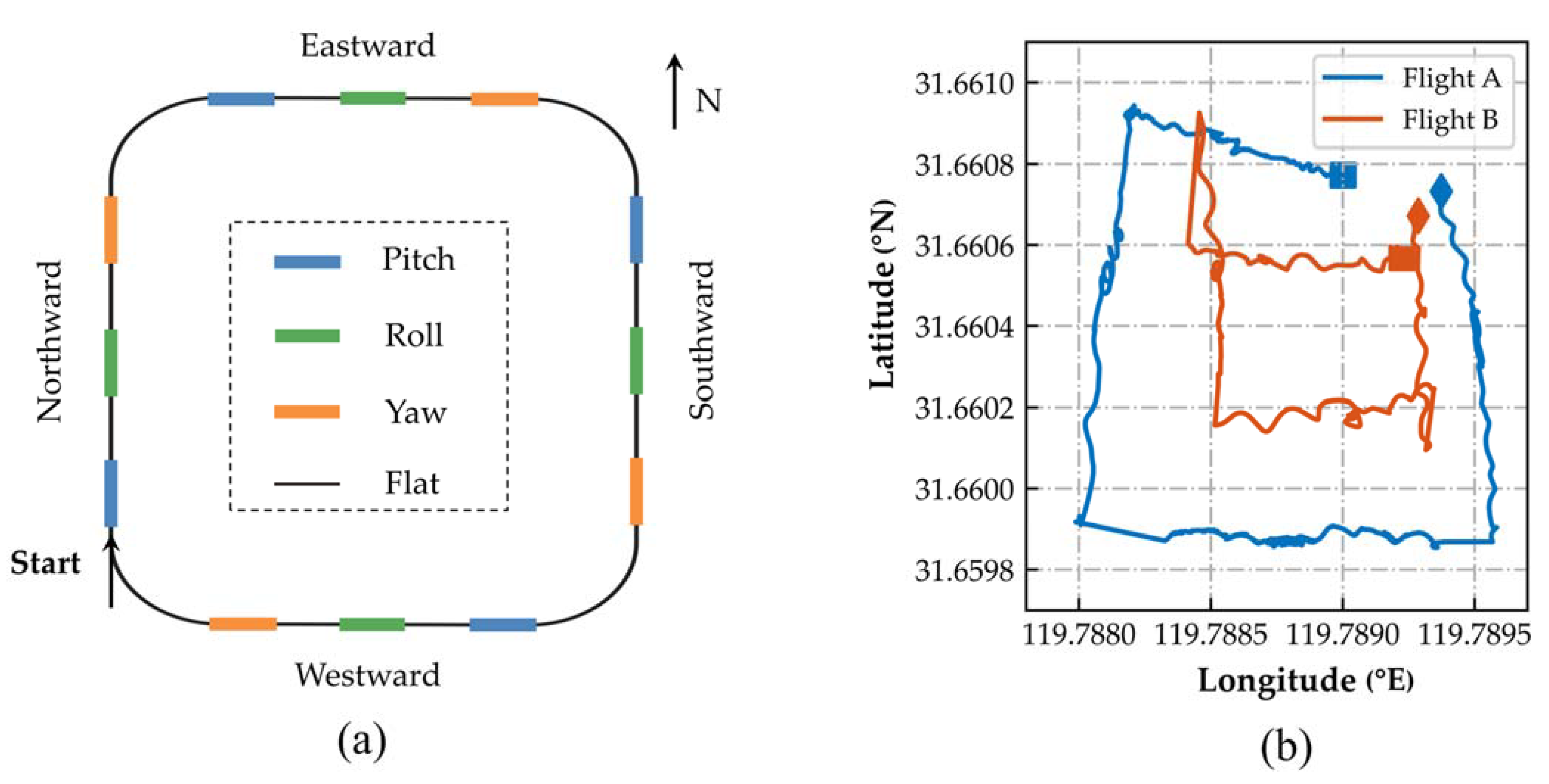
3.1. Compensation Flight
3.2. Adaptive Modeling
3.3. Magnetic Interference Compensation
4. Line Flight Experiment
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Aali, A.A.; Shirazy, A.; Shirazi, A.; Pour, A.B.; Hezarkhani, A.; Maghsoudi, A.; Hashim, M.; Khakmardan, S. Fusion of Remote Sensing, Magnetometric, and Geological Data to Identify Polymetallic Mineral Potential Zones in Chakchak Region, Yazd, Iran. Remote Sens. 2022, 14, 6018. [Google Scholar] [CrossRef]
- Shabani, A.; Ziaii, M.; Monfared, M.S.; Shirazy, A.; Shirazi, A. Multi-Dimensional Data Fusion for Mineral Prospectivity Mapping (MPM) Using Fuzzy-AHP Decision-Making Method, Kodegan-Basiran Region, East Iran. Minerals 2022, 12, 1629. [Google Scholar] [CrossRef]
- Jiang, D.; Zeng, Z.; Zhou, S.; Guan, Y.; Lin, T. Integration of an Aeromagnetic Measurement System Based on an Unmanned Aerial Vehicle Platform and Its Application in the Exploration of the Ma’anshan Magnetite Deposit. IEEE Access 2020, 8, 189576–189586. [Google Scholar] [CrossRef]
- Noriega, G. Performance measures in aeromagnetic compensation. Leading Edge 2011, 30, 1122–1127. [Google Scholar] [CrossRef]
- Walter, C.; Braun, A.; Fotopoulos, G. Characterizing electromagnetic interference signals for unmanned aerial vehicle geophysical surveys UAV electromagnetic interference. Geophys. J. Soc. Explor. Geophys. 2021, 86, J21–J32. [Google Scholar]
- Tolles, W.E.; Lawson, J.D. Magnetic Compensation of MAD Equipped Aircraft; Airborne Instruments Lab. Inc.: Mineola, NY, USA, 1950; p. 201. [Google Scholar]
- Leliak, P. Identification and evaluation of magnetic-field sources of magnetic airborne detector equipped aircraft. IRE Trans. Aerosp. Navig. Electr. 1961, 3, 95–105. [Google Scholar] [CrossRef]
- Bickel, S.H. Small Signal Compensation of Magnetic Fields Resulting from Aircraft Maneuvers. IEEE Trans. AES 1979, 15, 518–525. [Google Scholar] [CrossRef]
- Leach, B.W. Aeromagnetic compensation as a linear regression problem. In Information Linkage between Applied Mathematics and Industry II; Academic Press: London, UK, 1980; pp. 139–161. [Google Scholar]
- Wu, P.L.; Zhang, Q.Y. Aeromagnetic compensation algorithm based on principal component analysis. J. Sens. 2018, 2018, 7. [Google Scholar] [CrossRef]
- Ren, K.X. Research on Magnetic Interference Compensation and Simulation Technology for Aviation Platforms; Harbin Institute of Technology: Harbin, China, 2016. [Google Scholar]
- Inaba, T.; Shima, A.; Konishi, M. Magnetic noise compensation using FIR model parameter estimation method. Electron. Commun. Jpn. 2002, 85, 1–11. [Google Scholar] [CrossRef]
- Zhao, G.; Han, Q.; Peng, X. An Aeromagnetic Compensation Method Based on a Multimodel for Mitigating Multicollinearity. Sensors 2019, 19, 2931. [Google Scholar] [CrossRef]
- Zhao, X.; Zheng, X.C.; Jiao, J. Fast Processing Method of Aeromagnetic Compensation Basedon Fluxgate Estimation. J. Jilin Univ. 2019, 49, 857–864. [Google Scholar]
- Zhang, Y.; Zhao, Y.X.; Chang, S. An aeromagnetic compensation algorithm for aircraft based on fuzzy adaptive kalman filter. J. Appl. Math. 2014, 2014, 405671. [Google Scholar] [CrossRef]
- Pan, X.; Zhang, Q. An aeromagnetic compensation method considering geomagnetic gradient changes. Sensors and Microsystems 2020, 39, 4. [Google Scholar]
- Xu, X.; Huang, L.; Liu, X. DeepMAD: Deep Learning for Magnetic Anomaly Detection and Denoising. IEEE Access 2020, 99, 121257–121266. [Google Scholar] [CrossRef]
- Zhang, D.K. Analysis of Aeromagnetic Swing Noise and Corresponding Compensation Method. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–10. [Google Scholar] [CrossRef]
- Zhou, S.; Yang, C.; Su, Z. An Aeromagnetic Compensation Algorithm Based on Radial Basis Function Artificial Neural Network. Appl. Sci. 2022, 13, 136. [Google Scholar] [CrossRef]
- Feng, Y.; Zhang, Q.; Zheng, Y.; Qu, X.; Wu, F.; Fang, G. An Improved Aeromagnetic Compensation Method Robust to Geomagnetic Gradient. Appl. Sci. 2022, 12, 1490. [Google Scholar] [CrossRef]
- Chen, B.; Zhang, K.; Yan, B.; Zhu, W. The Conjunctive Compensation Method Based on Inertial Navigation System and Fluxgate Magnetometer. Appl. Sci. 2023, 13, 5138. [Google Scholar] [CrossRef]
- Yu, P.; Zhao, X.; Jiao, J. An improved neural network method for aeromagnetic compensation. Meas. Sci. Technol. 2021, 32, 045106. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, Z.; Du, Y.; Luo, G.; Zhang, Y.; Zheng, Z.; Ren, C. Mineralogical characteristics and genetic significance of the Hemushan iron deposit in the southern section of Ningwu. Depos. Geol. 2015, 34, 163–178. [Google Scholar]
- Liu, Y.; Ma, M.; Shen, X. Analysis of the Tectonic Construction Characteristics and Metallogenic Control of Mineral Fields in the Ningwu Area. Adv. Geosci. 2018, 8, 640. [Google Scholar]
- Yu, P.; Zhao, X.; Jiao, J. An Aeromagnetic Compensation Algorithm Based on a Deep Autoencoder. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1–5. [Google Scholar] [CrossRef]
- Gamey, T.J.; Doll, W.E.; Beard, L.P. Analysis of Correlated Noise in Airborne Magnetic Gradients for Unexploded Ordnance Detection. J. Environ. Eng. Geophys. 2004, 9, 115–125. [Google Scholar] [CrossRef]
- Zhang, N.; Lin, C. Modeling and Compensation of Aircraft Background Magnetic Interference Based on Improved Ridge Estimation. Syst. Eng. Electron. Technol. 2012, 34, 5. [Google Scholar]
- Hefnawy, A.E.; Farag, A. A combined nonlinear programming model and Kibria method for choosing ridge parameter regression. Commun. Stat.-Simul. Comput. 2014, 43, 1442–1470. [Google Scholar] [CrossRef]
- Hardwick, C.D. Important design considerations for inboard airborne magnetic gradiometers. Geophysics 1984, 49, 2004–2018. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | VIF | P | |||||
|---|---|---|---|---|---|---|---|
| Model 1 | Model 2 | Model 3 | Model 4 | Model 5 | Model 6 | Model 7 | |
| 3.7026 | 3.6942 | 3.6826 | 3.5521 | 2.54 × | 2.74 × | 1.01 × 10−84 | |
| 1.0531 | 1.0513 | 1.0513 | 1.0430 | 0.00 × | 0.00 × | 0.00 ×100 | |
| 3.7073 | 3.6989 | 3.6980 | 3.5858 | 2.59 × | 2.73 × | 6.51 ×10−78 | |
| 17.1471 | 10.2101 | 10.2068 | —— | —— | —— | —— | |
| 17.3934 | 9.9203 | 9.8983 | 7.3872 | 5.87 × | 6.48 × | 1.29 ×10−11 | |
| 63.3209 | —— | —— | —— | —— | —— | —— | |
| 3.8956 | 2.5798 | 2.5678 | 2.3076 | 1.75 × | 1.10 × | 1.67 ×10−05 | |
| 16.9119 | 8.5958 | 8.5825 | 6.8657 | 2.52 × | 2.50 × | 1.97 × 10−09 | |
| 42.0086 | 11.4980 | 11.4965 | 1.9235 | 6.10 × | 3.24 × | 5.49 × 10−08 | |
| 5.3301 | 5.2683 | 5.0892 | 4.9592 | 4.50 × | 5.30 × | 7.86 × 10−04 | |
| 19.5990 | 19.4916 | —— | —— | —— | —— | —— | |
| 11.0102 | 10.9935 | 4.1326 | 4.0829 | 5.18 × | —— | —— | |
| 5.4917 | 5.1444 | 4.7143 | 4.2271 | 1.76 × | 7.30 × | 2.27 × 10−02 | |
| 17.4016 | 17.2145 | 1.7951 | 1.7671 | 2.40 × | 2.32 × | —— | |
| 12.1846 | 11.6172 | 5.9216 | 5.6138 | 2.09 × | 5.17 × | 5.06 × 10−07 | |
| 3.2808 | 3.2048 | 3.0031 | 2.9681 | 3.63 × | 2.14 × | 3.08 × 10−05 | |
| 6.5936 | 6.5046 | 6.4299 | 6.4131 | 1.64 × | 1.92 × | 3.78 × 10−06 | |
| 1.8687 | 1.8573 | 1.8510 | 1.8507 | 3.79 × | 3.44 × | 1.74 × 10−02 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bi, F.; Yu, P.; Jiao, J.; Zhou, L.; Zeng, X.; Zhou, S. An Adaptive Modeling-Based Aeromagnetic Maneuver Noise Suppression Method and Its Application in Mine Detection. Remote Sens. 2023, 15, 4590. https://doi.org/10.3390/rs15184590
Bi F, Yu P, Jiao J, Zhou L, Zeng X, Zhou S. An Adaptive Modeling-Based Aeromagnetic Maneuver Noise Suppression Method and Its Application in Mine Detection. Remote Sensing. 2023; 15(18):4590. https://doi.org/10.3390/rs15184590
Chicago/Turabian StyleBi, Fengyi, Ping Yu, Jian Jiao, Longran Zhou, Xiangcheng Zeng, and Shuai Zhou. 2023. "An Adaptive Modeling-Based Aeromagnetic Maneuver Noise Suppression Method and Its Application in Mine Detection" Remote Sensing 15, no. 18: 4590. https://doi.org/10.3390/rs15184590
APA StyleBi, F., Yu, P., Jiao, J., Zhou, L., Zeng, X., & Zhou, S. (2023). An Adaptive Modeling-Based Aeromagnetic Maneuver Noise Suppression Method and Its Application in Mine Detection. Remote Sensing, 15(18), 4590. https://doi.org/10.3390/rs15184590