
Integrating Topographic Skeleton into Deep Learning for Terrain Reconstruction from GDEM and Google Earth Image


 , and
, and 
Abstract
:
1. Introduction
2. Method
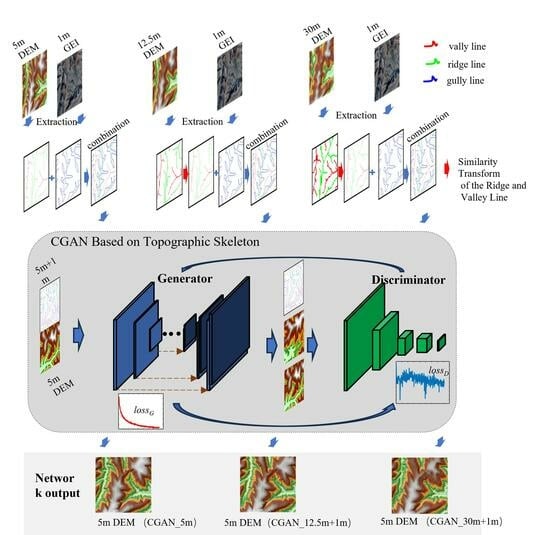
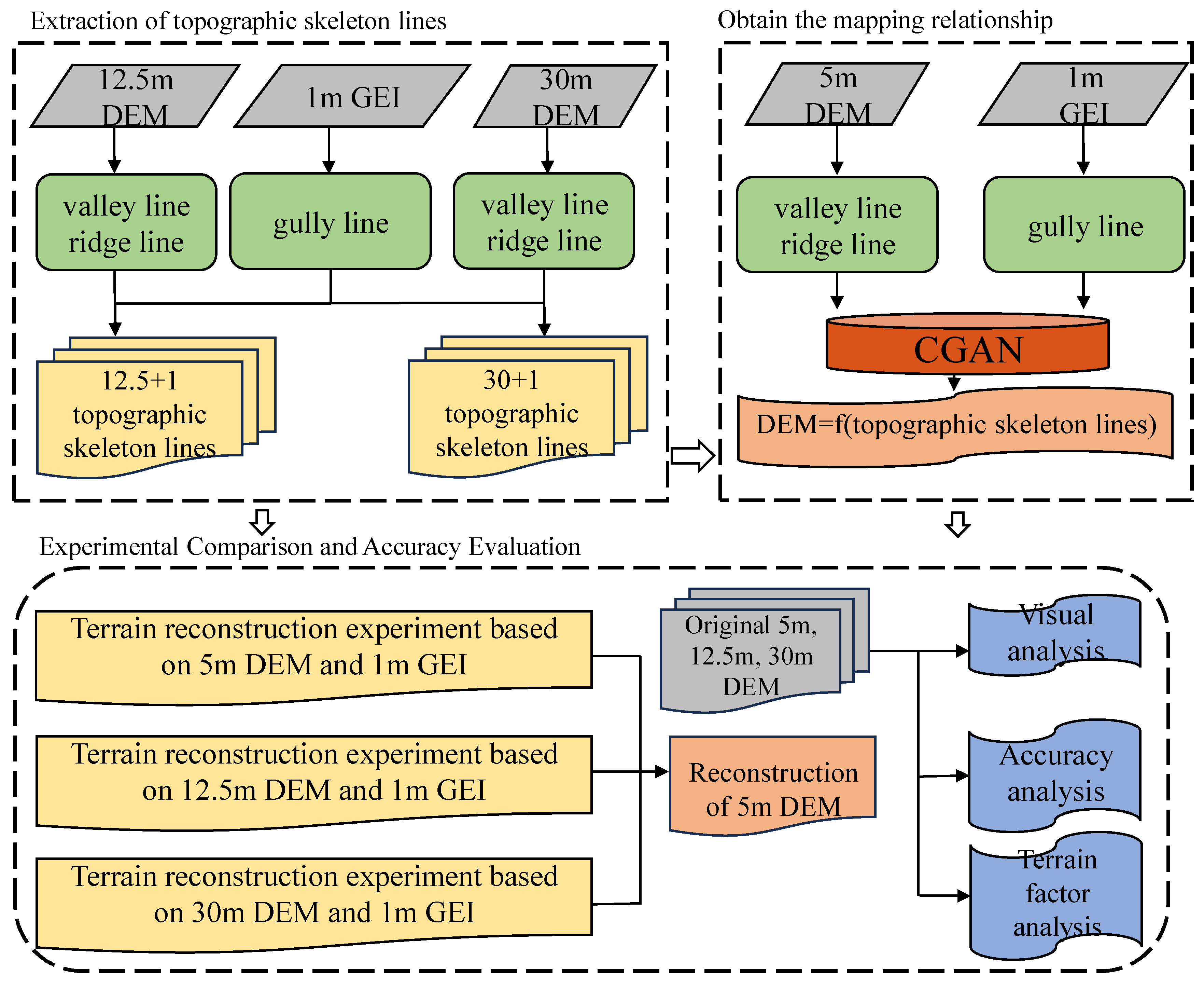
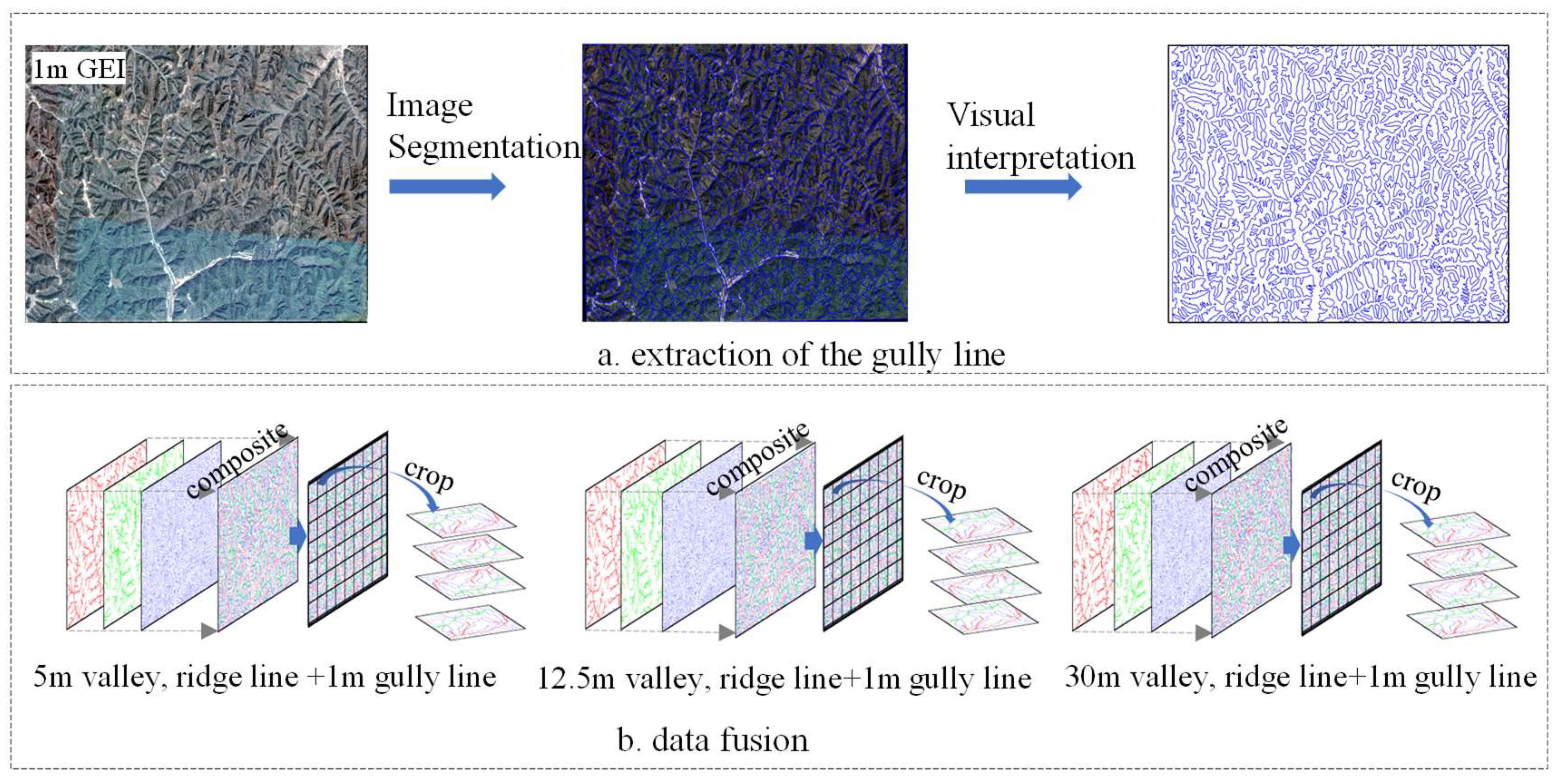
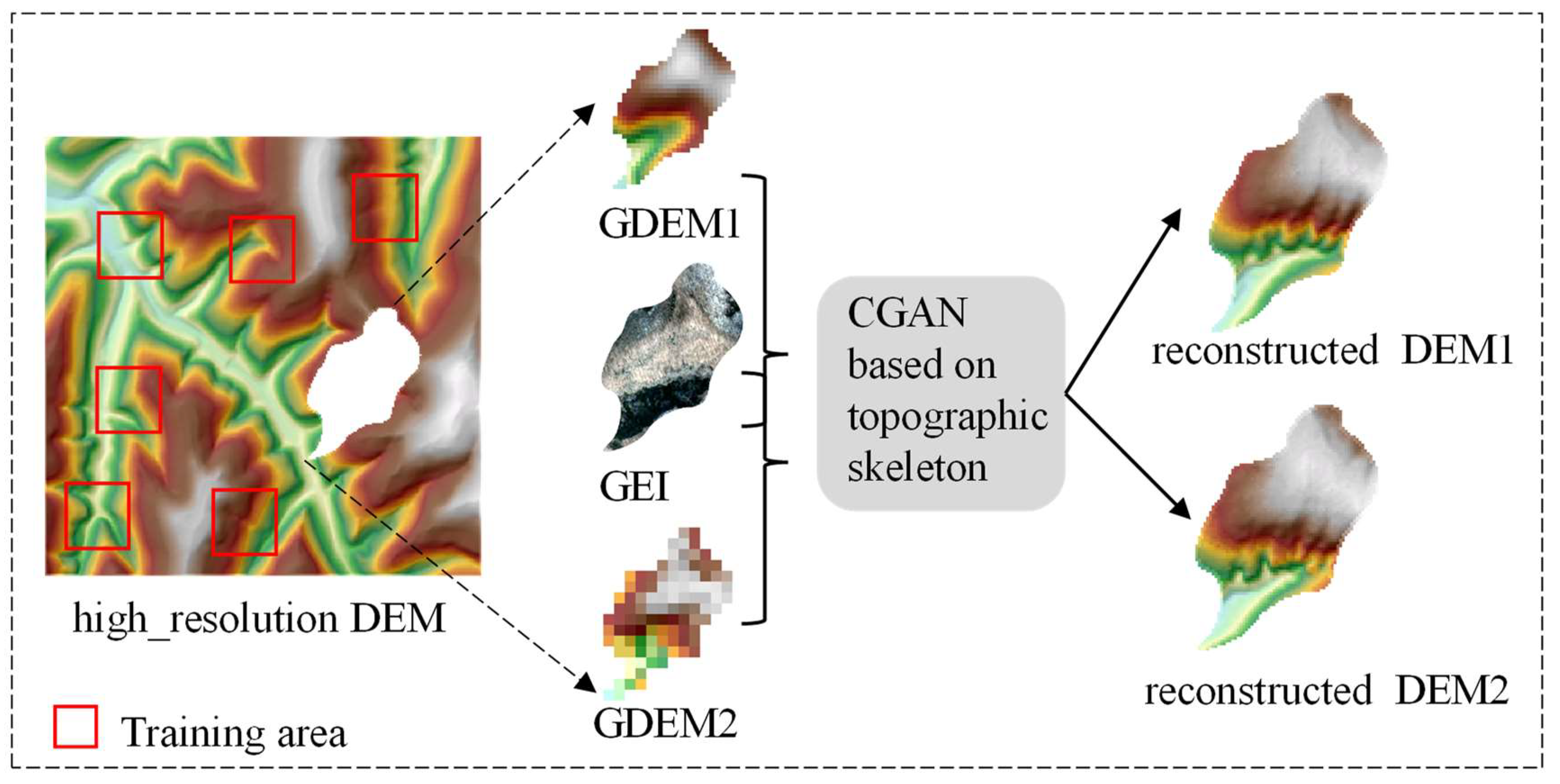
2.1. Basic Ideas
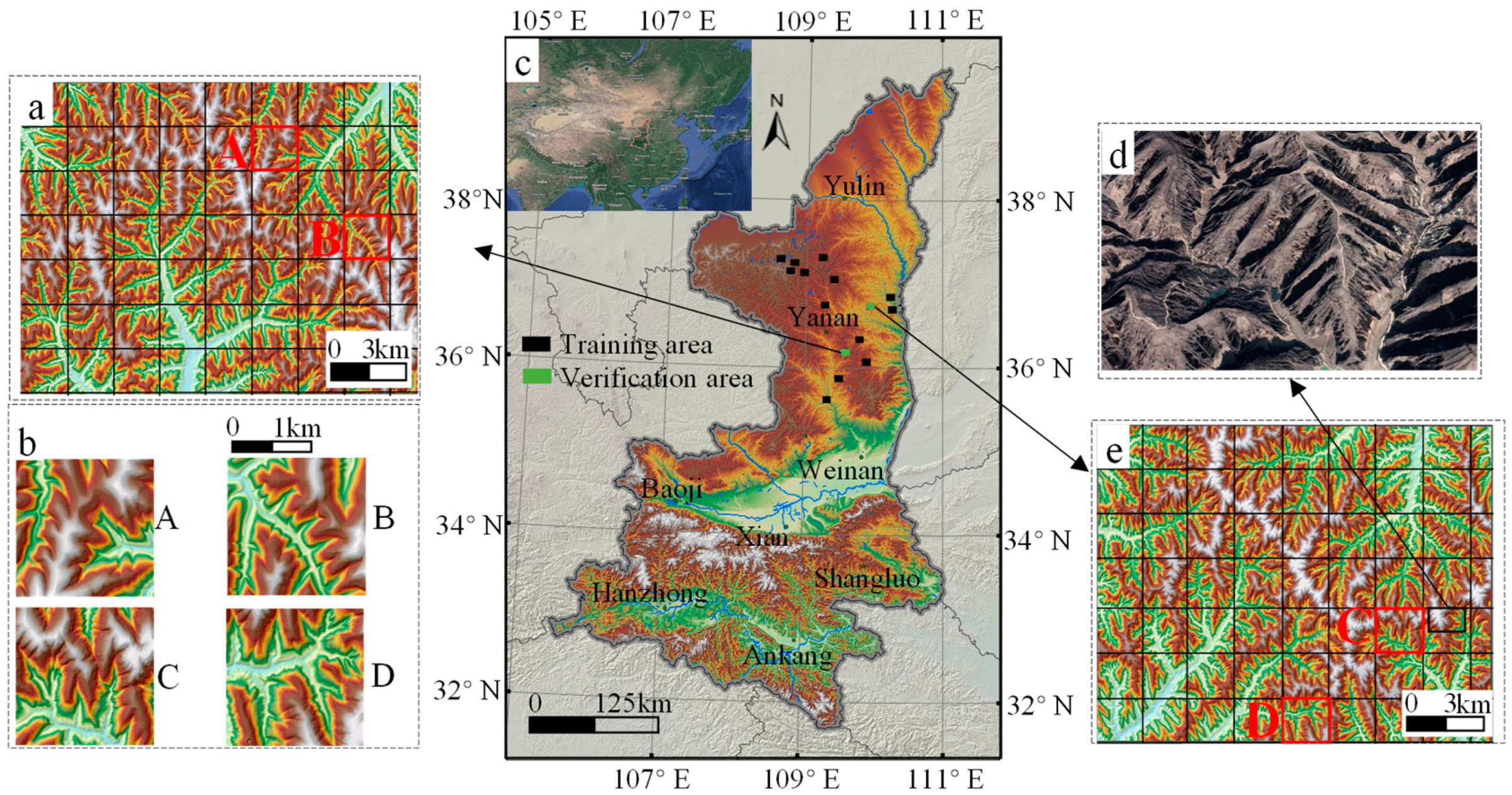
2.2. Data Description
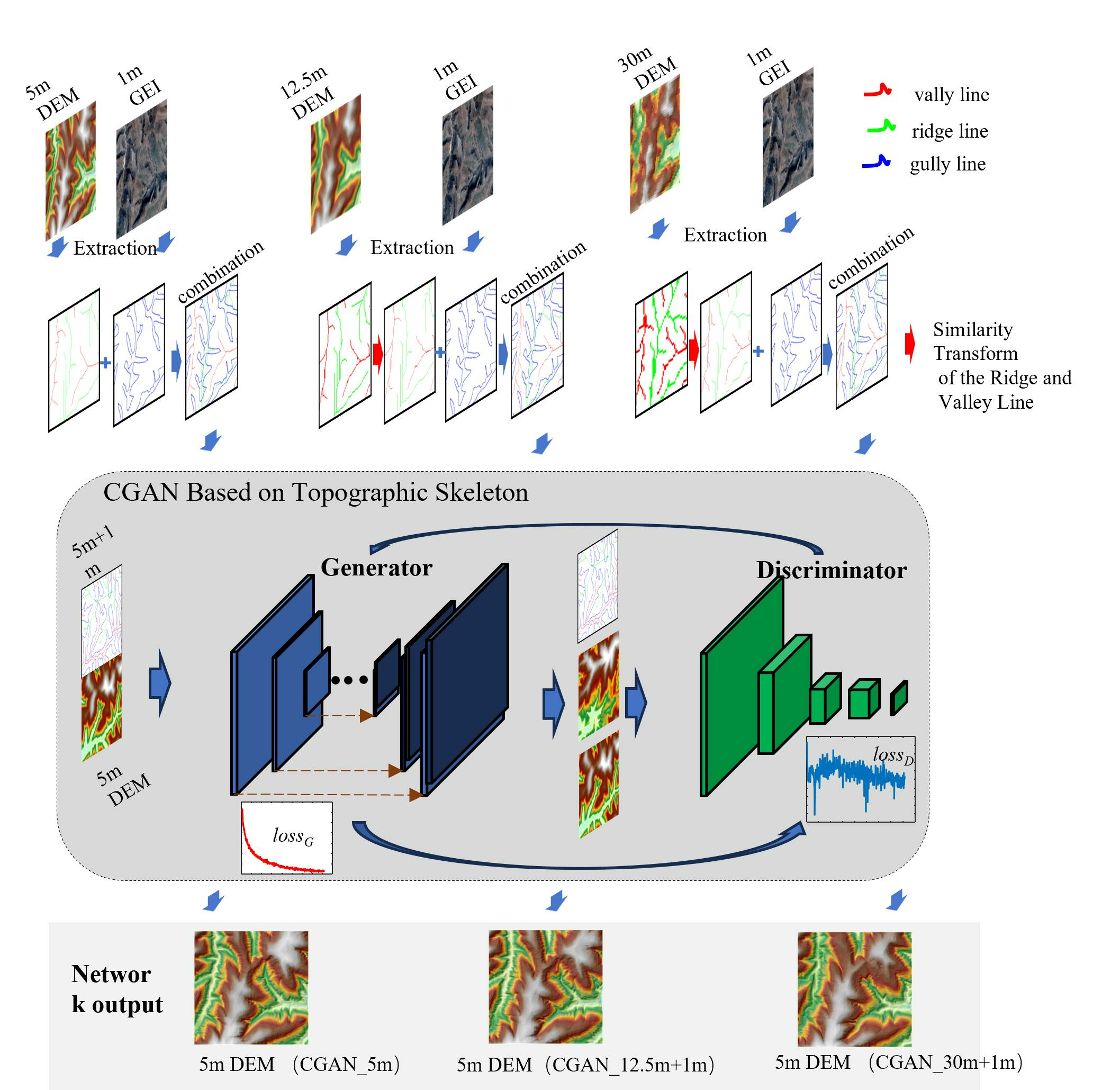
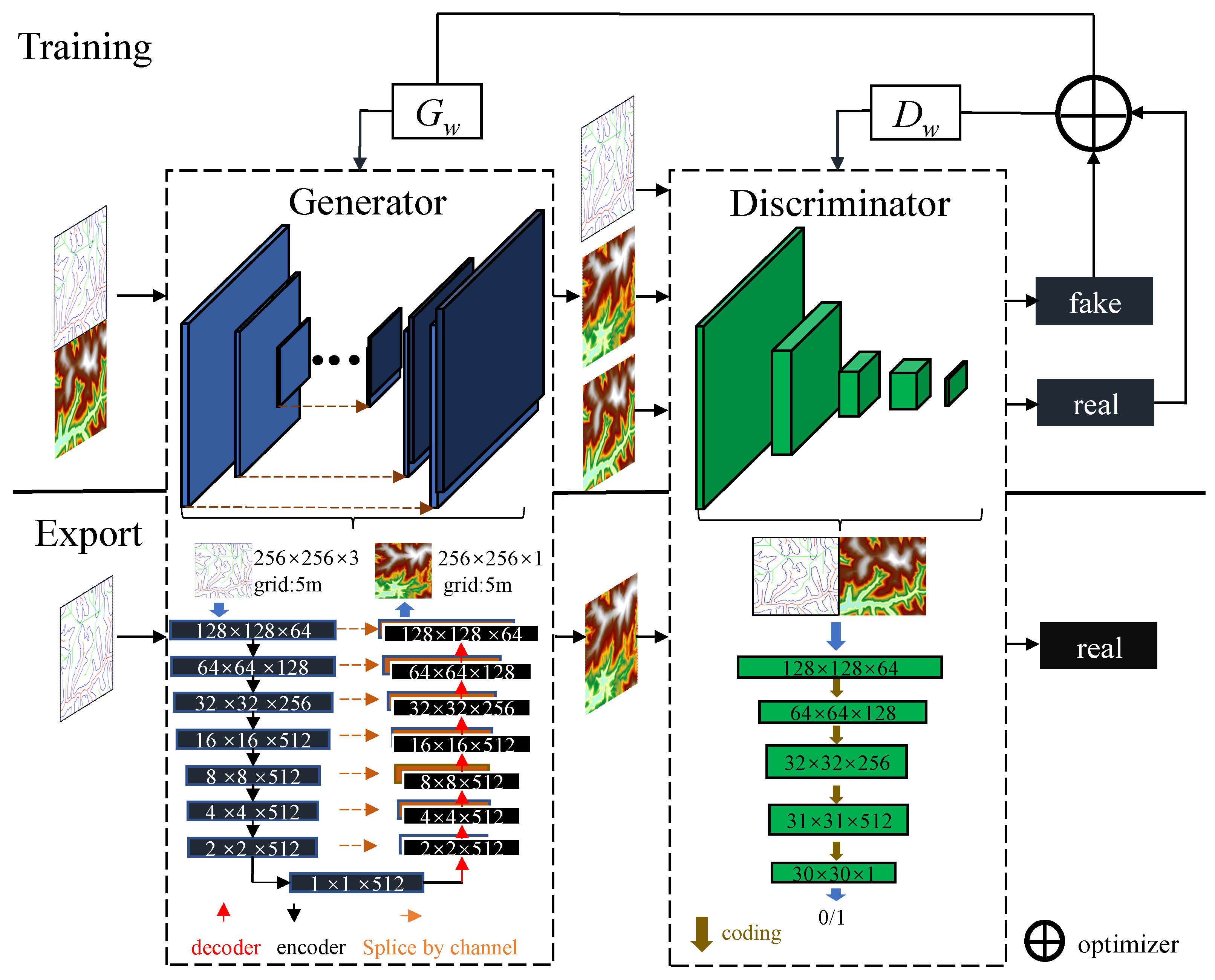
2.3. CGAN Based on Topographic Skeleton
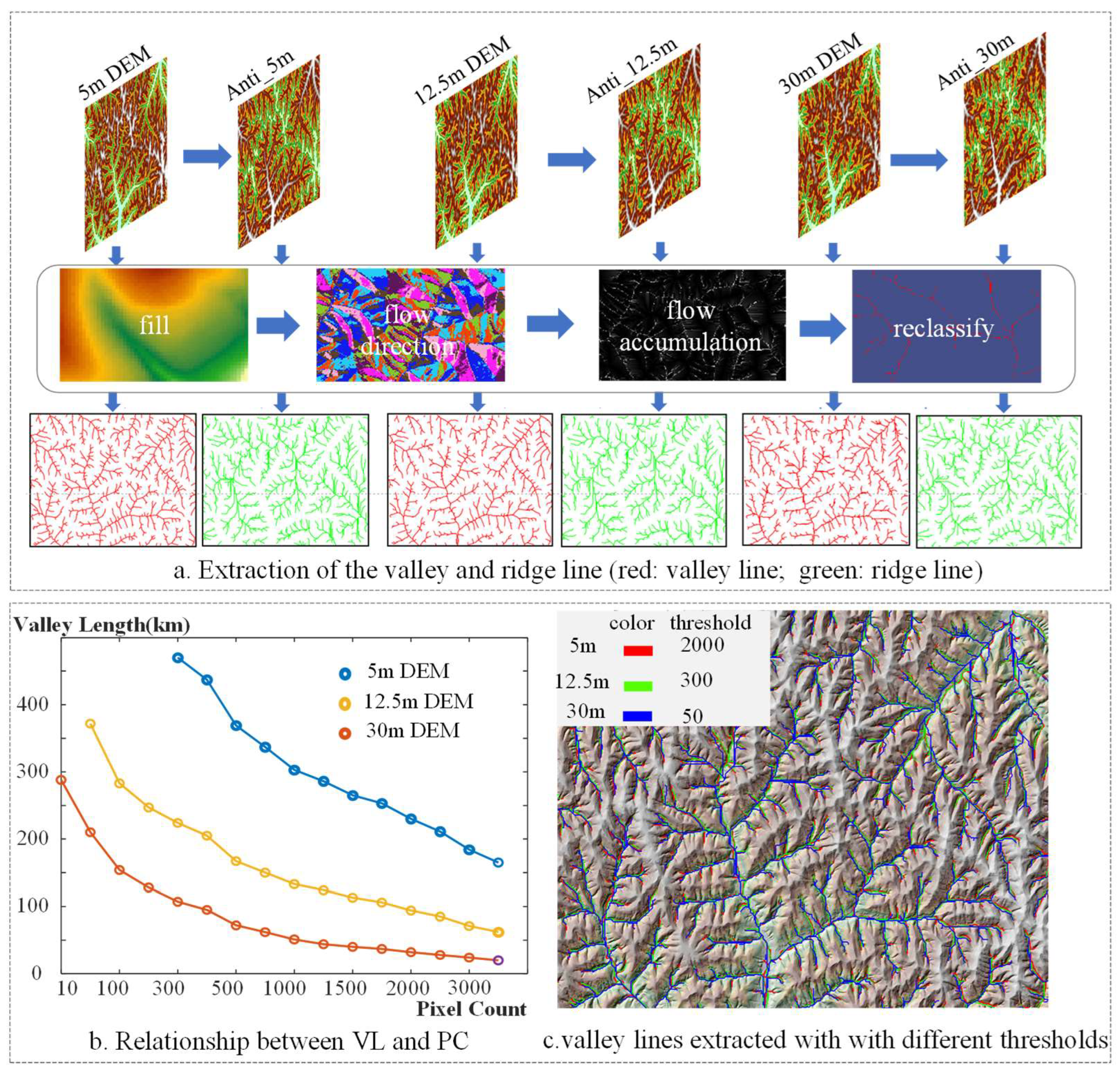
2.4. Similarity Transform of the Ridge and Valley Line
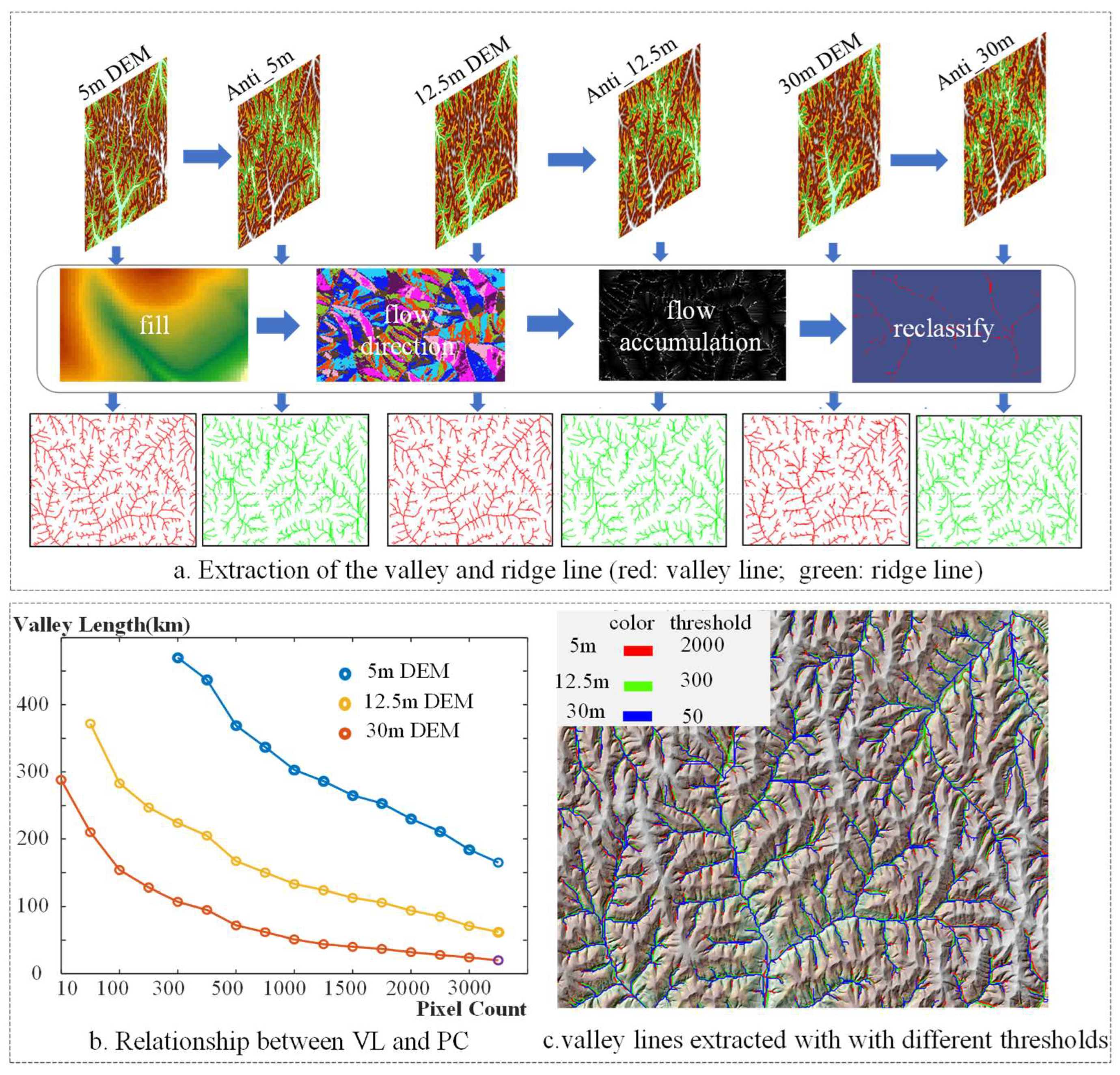
2.5. CGAN Input Data Production
2.6. Performance Evaluation
3. Results
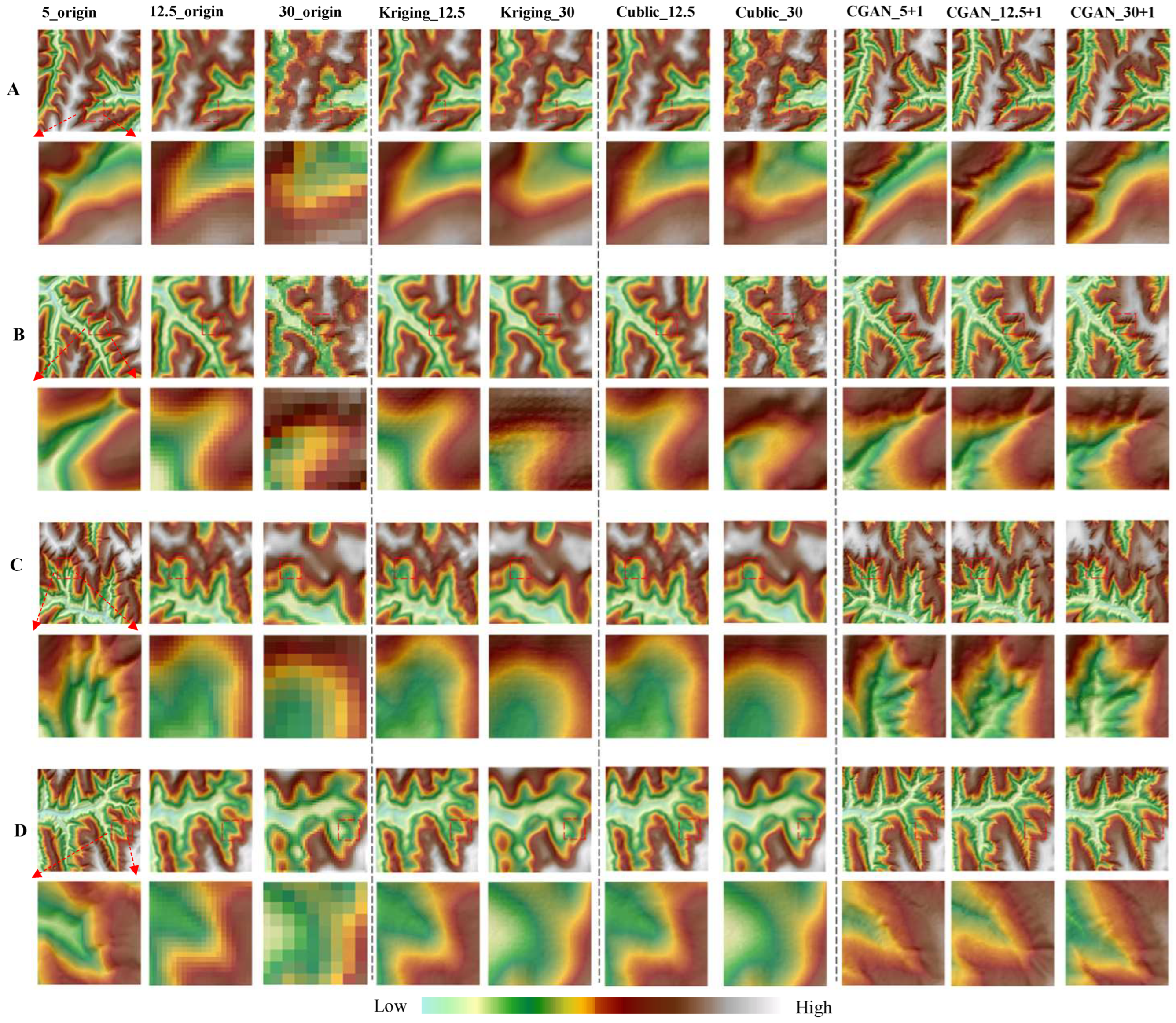
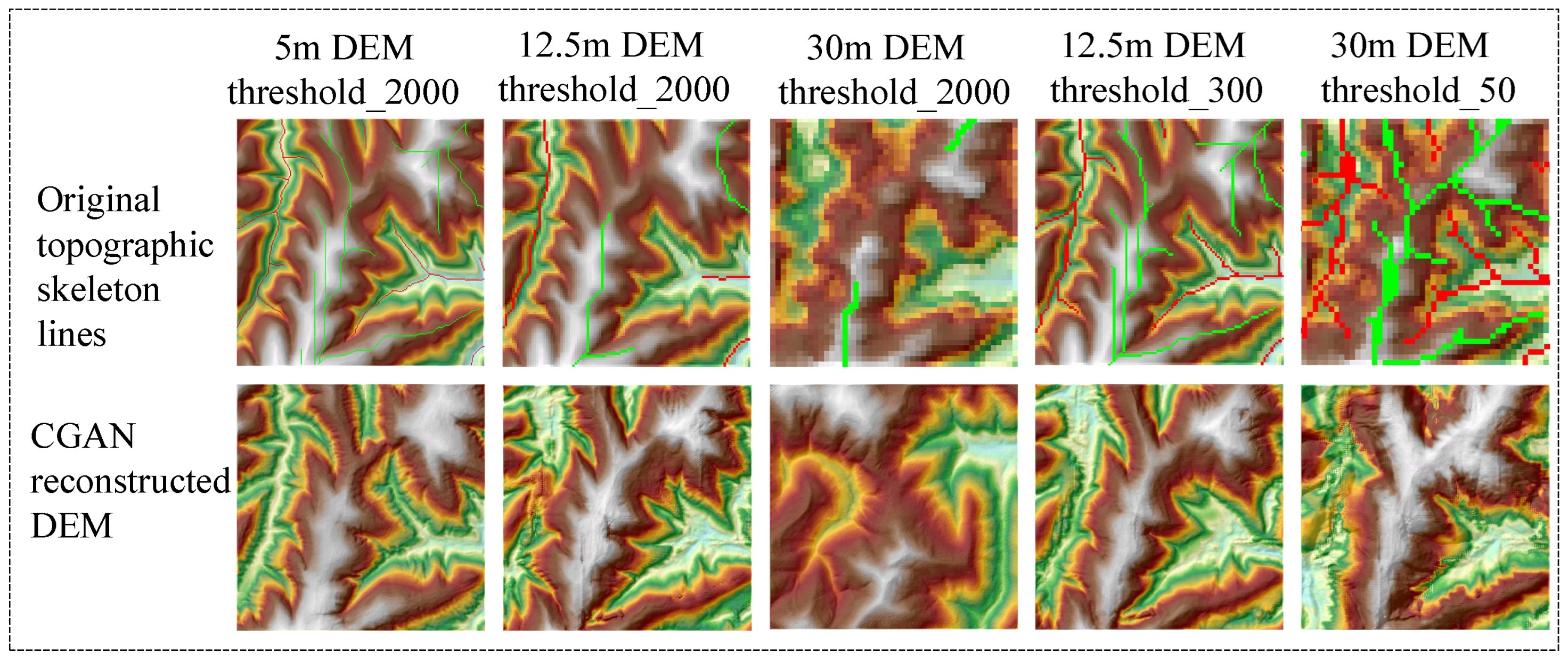
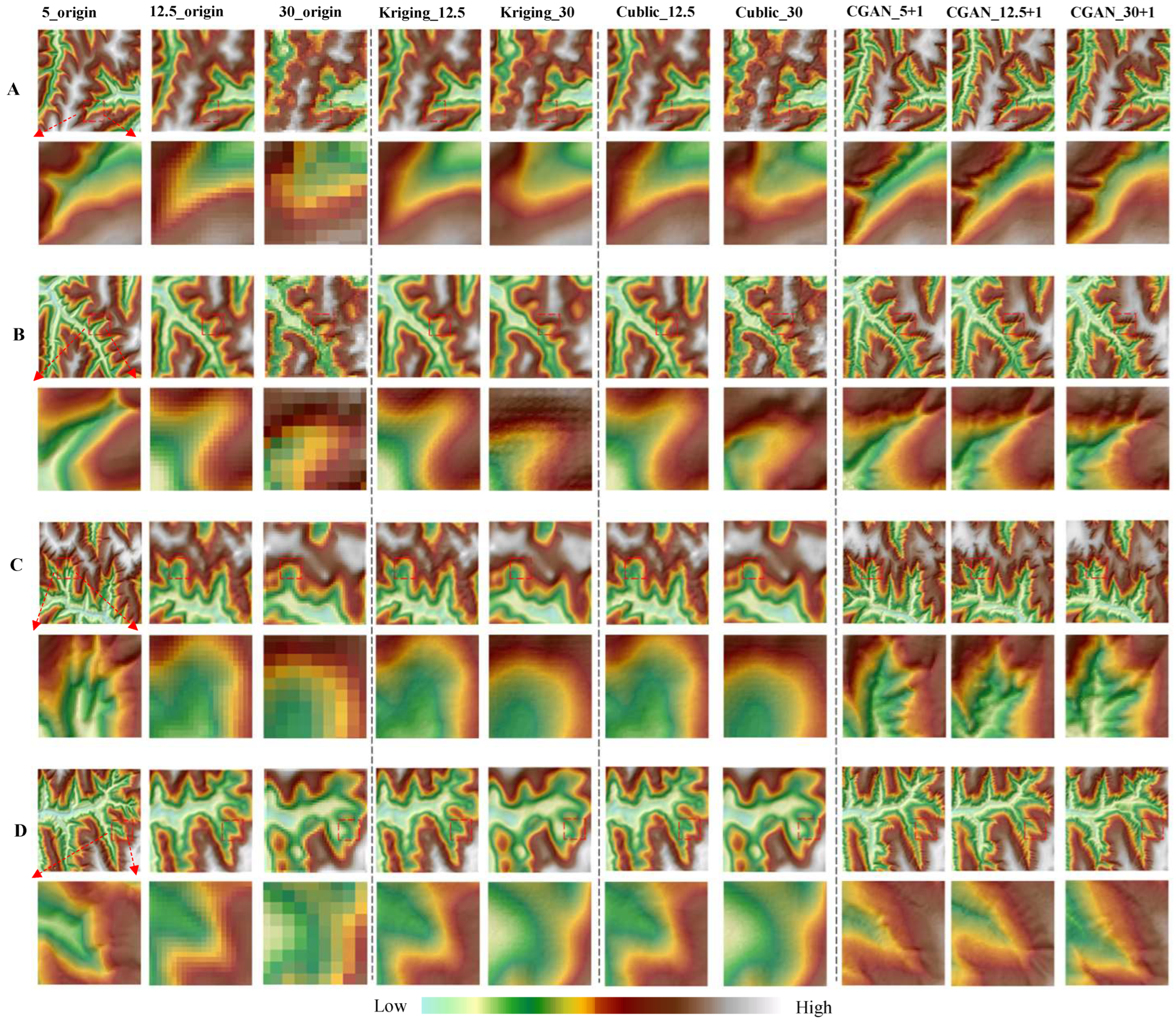
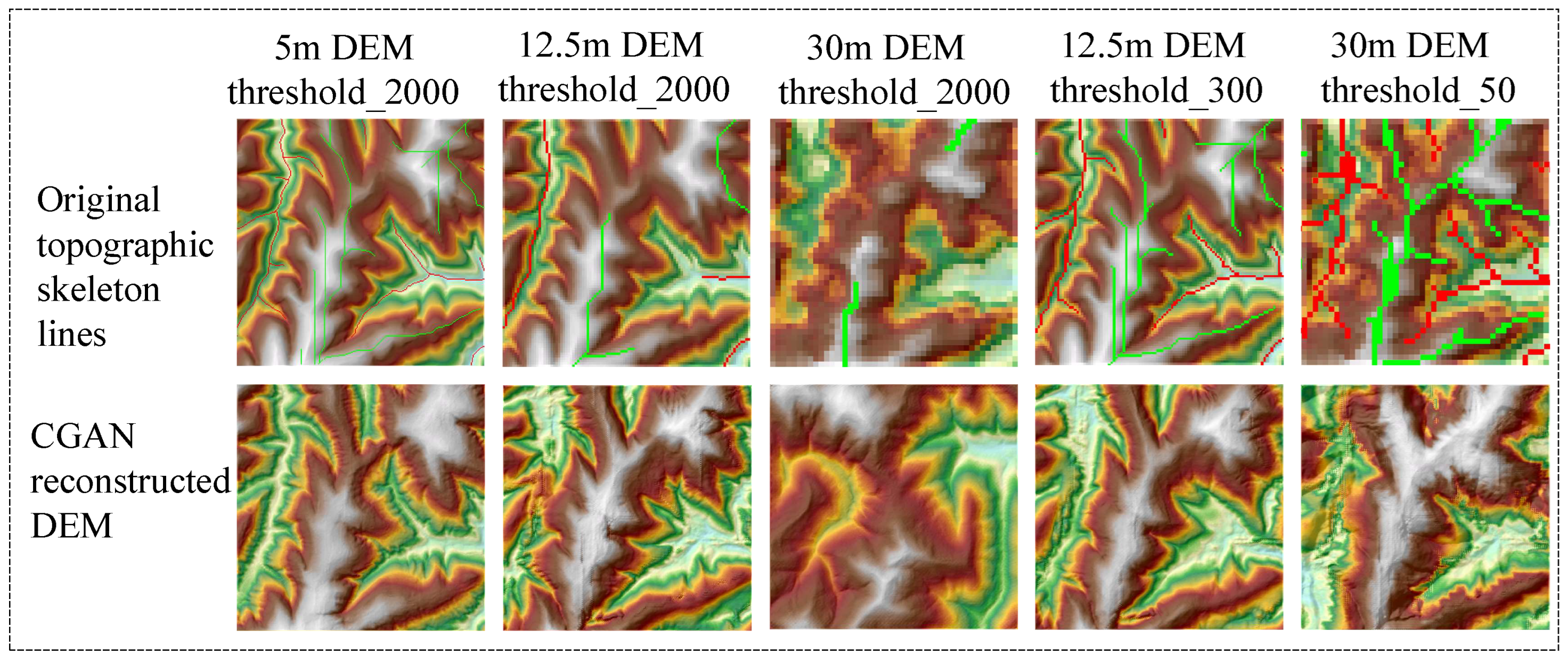
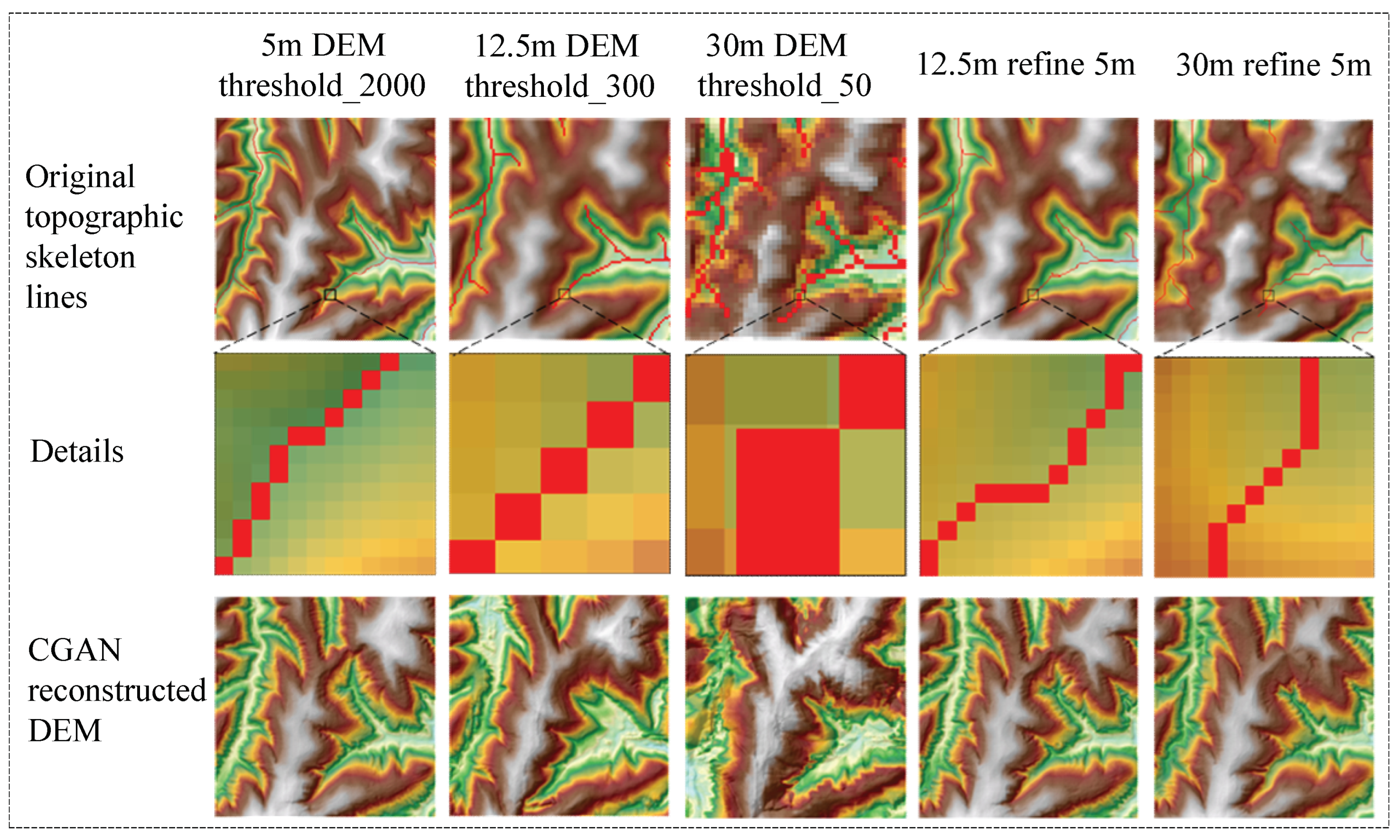
3.1. Visual Comparison
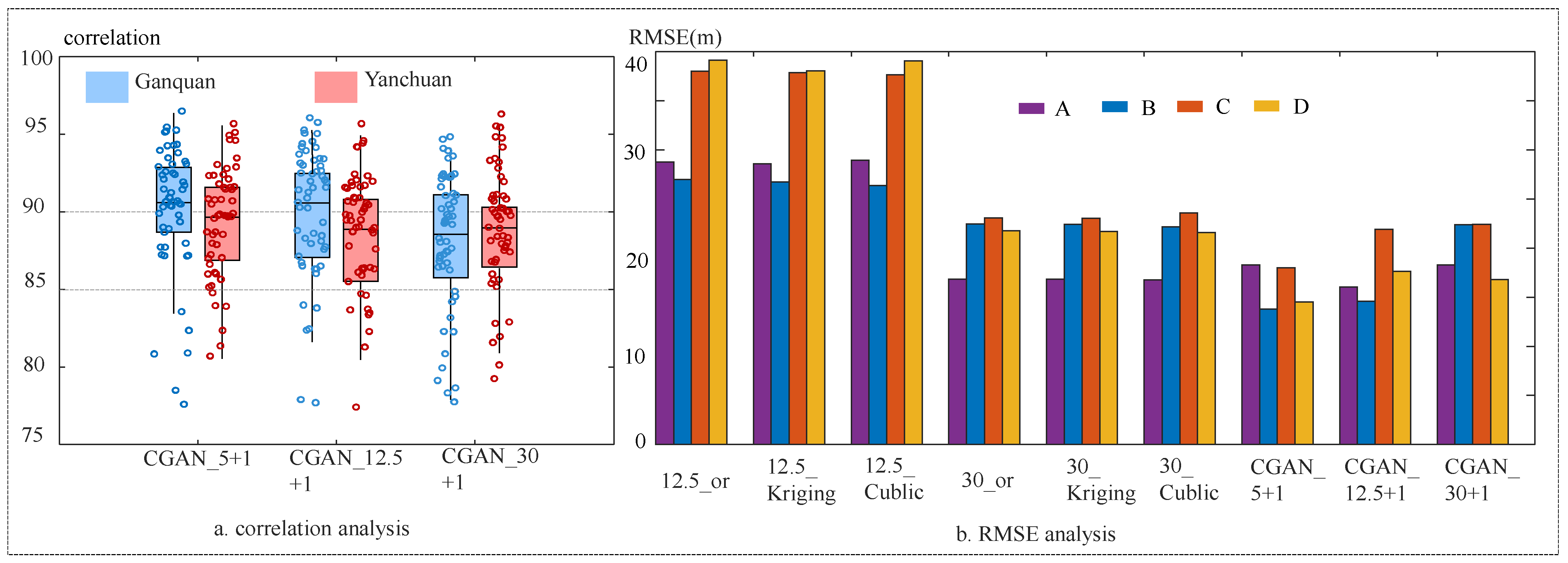
3.2. Accuracy Analysis
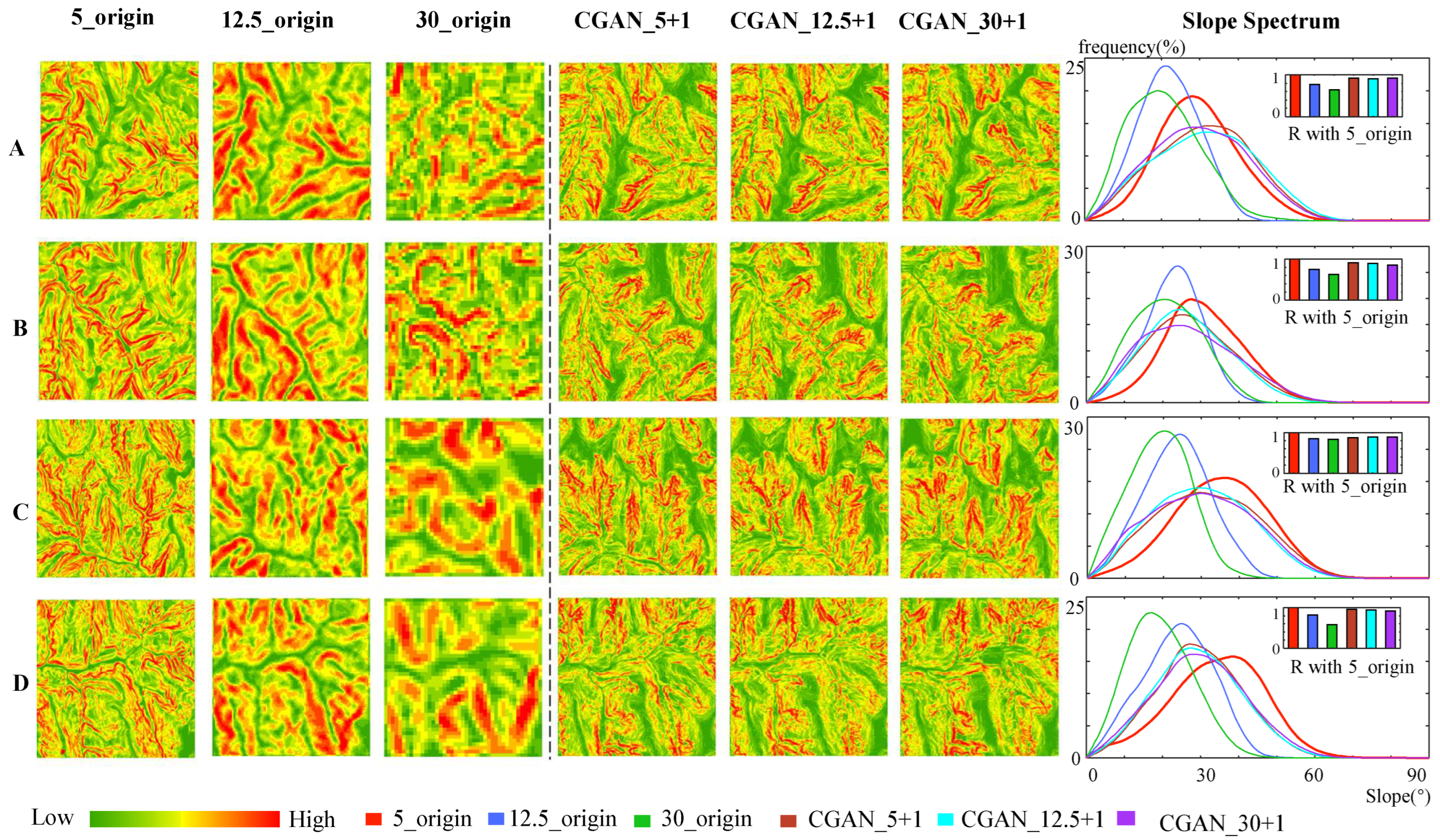
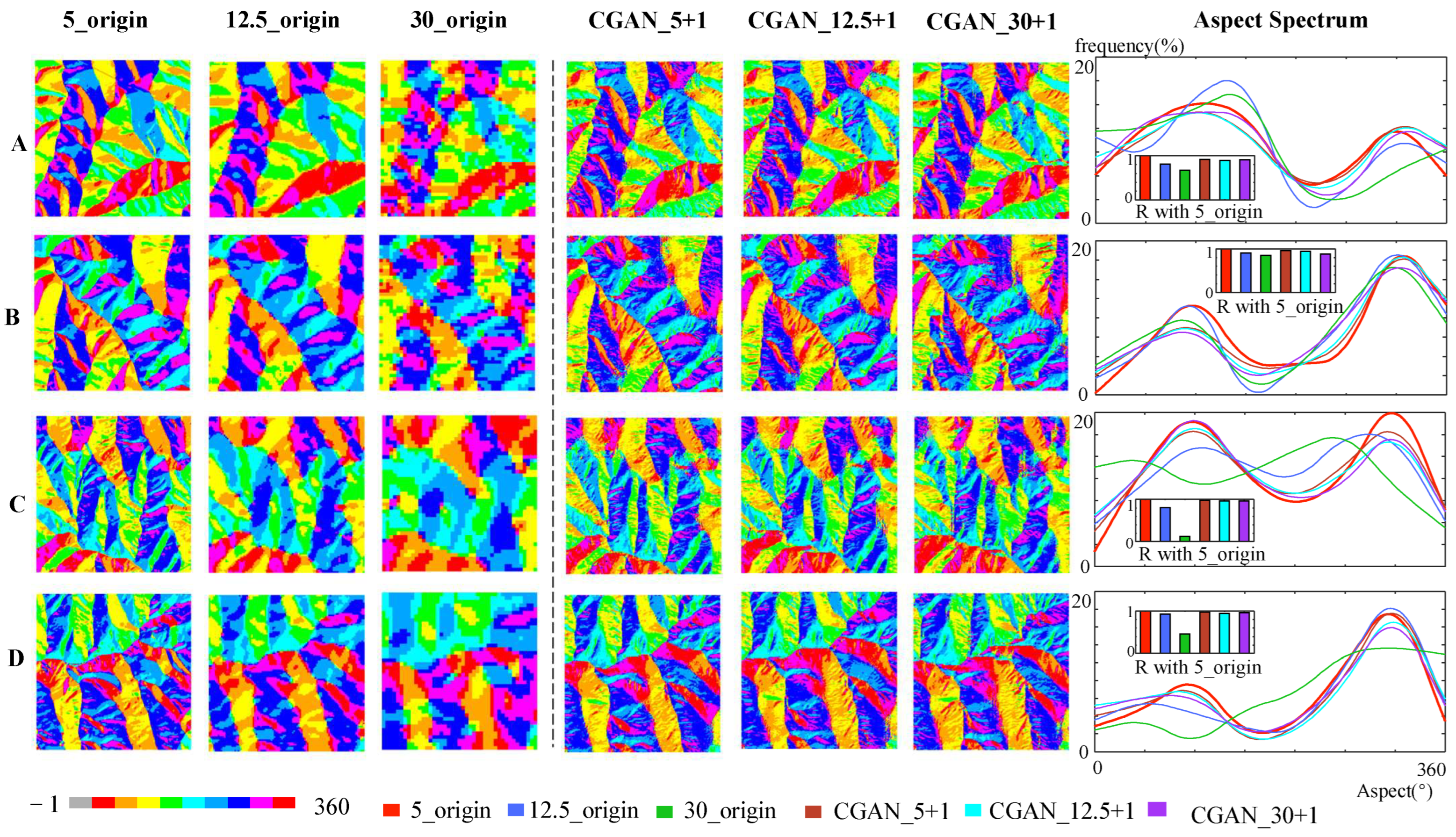
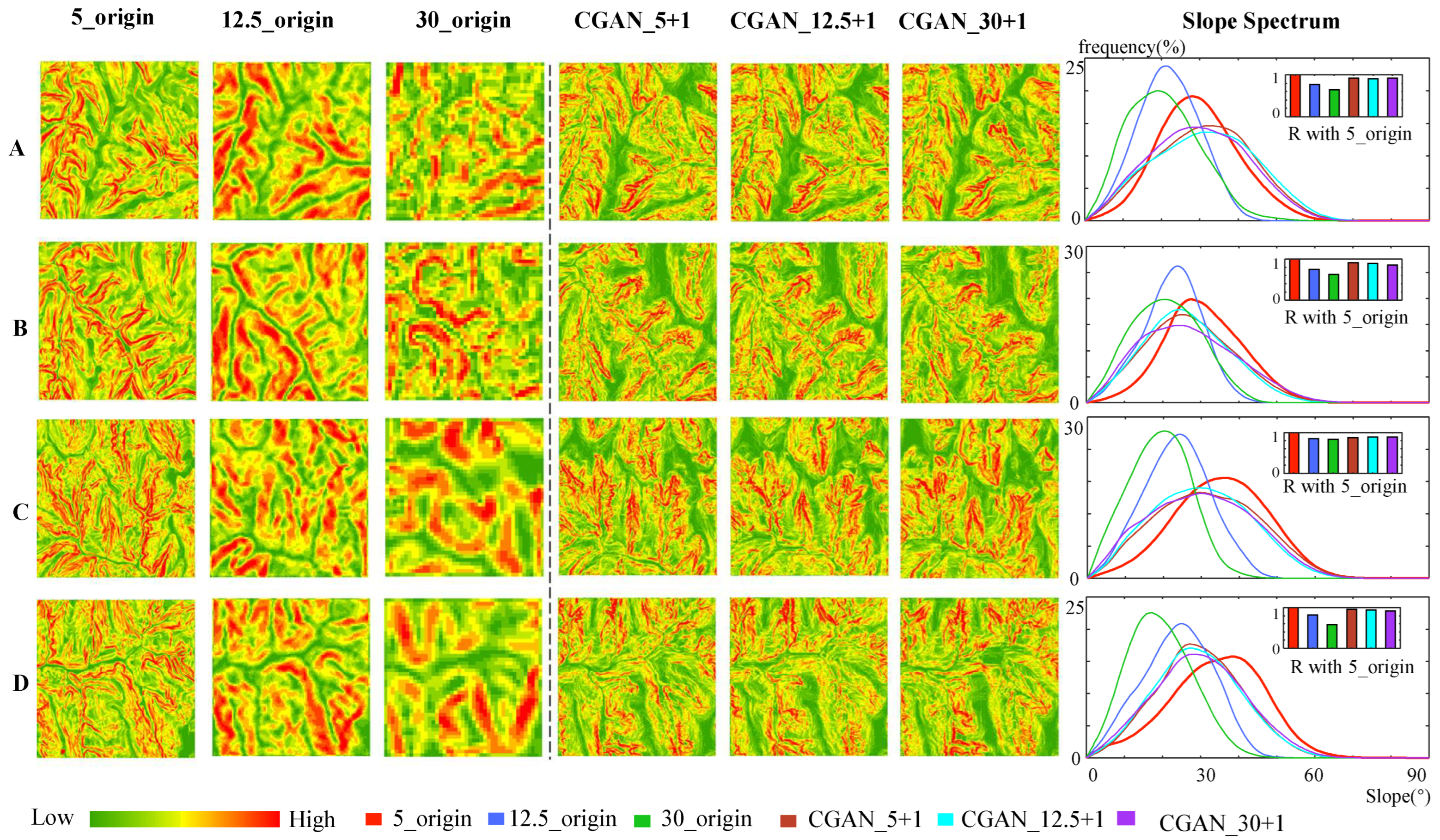
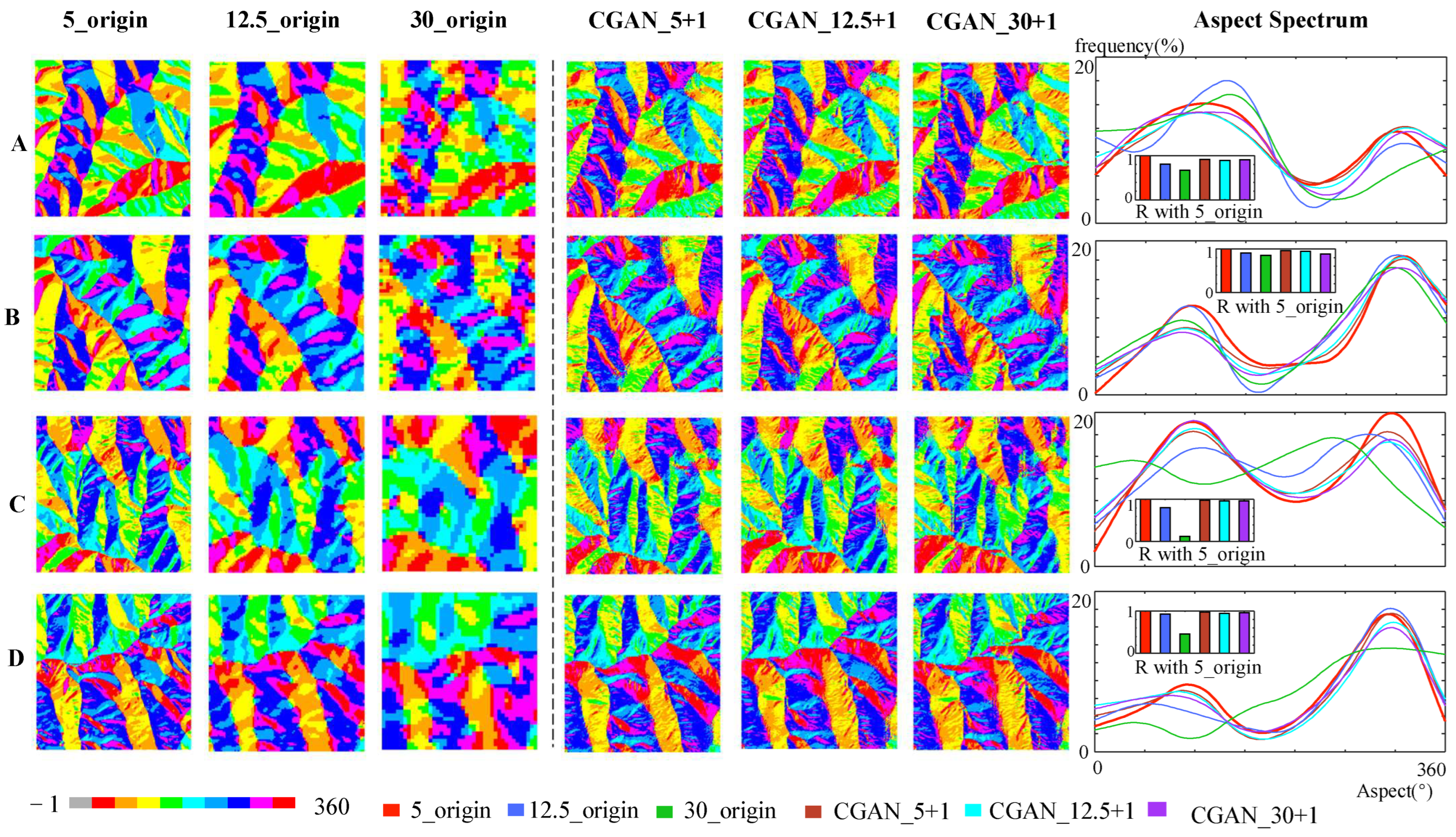
3.3. Terrain Factors’ Analysis
4. Discussion
4.1. Effect of Similarity of Topographic Skeleton
4.1.1. Influence of the Topographic Skeleton Length
4.1.2. Influence of the DEM Grid Size
4.2. Difference with the Traditional Interpolation Method
4.3. Application of the Void Filling of DEM
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, Y.; Luo, M.; Liang, B.; Chang, X.; Xiang, W.; Zhang, B. Effects of different DEM spatial interpolation methods on soil erosion simulation: A case study of a typical gully of dry-hot valley based on USPED. Prog. Geogr. 2016, 35, 870–877. [Google Scholar]
- Chen, C.; Yue, T. DEM error analysis based on conditional stochastic simulation. J. Geo-Inf. Sci. 2009, 11, 5572–5576. [Google Scholar] [CrossRef]
- Lan, J.; Yu, H.; Chen, L.; Ma, H.; Zhang, Z. Scale effect of airborne LiDAR DEM in watershed hydrological analysis and simulation. Bull. Surv. Mapp. 2020, 0, 40–46. [Google Scholar]
- Dai, W.; Qian, W.; Liu, A.; Wang, C.; Yang, X.; Hu, G.; Tang, G. Monitoring, and modeling sediment transport in space in small loess catchments using UAV-SFM photogrammetry. Catena 2022, 214, 106244. [Google Scholar] [CrossRef]
- Wang, J.; Qin, Z.; Zhao, G.; Li, B.; Gao, C. Scale Effect Analysis of Basin Topographic Features Based on Spherical Grid and DEM: Taking the Yangtze River Basin as an Example. J. Basic Sci. Eng. 2022, 30, 1109–1120. [Google Scholar]
- Dai, W.; Yang, X.; Na, J.; Li, J.; Brus, D.; Xiong, L.; Tang, G.; Huang, X. Effects of DEM resolution on the accuracy of gully maps in loess hilly areas. Catena 2019, 177, 114–125. [Google Scholar] [CrossRef]
- Mao, Y.; Song, Z.; Yue, Z.; Jia, J.; Wang, B. Application of grey scale image in terrain modeling. Fire Control Command Control 2019, 44, 160–164. [Google Scholar]
- Xu, J.; Gu, H.; Zeng, Y.; Li, X. Research on seabed terrain modeling with adaptive screen resolution. Comput. Simul. 2022, 39, 142–145. [Google Scholar]
- Dai, W.; Na, J.; Yang, X.; Cao, J. An automatic retrieval method for artificial terrace based on illumination model of DEM shading. J. Geo-Inf. Sci. 2017, 19, 754–762. [Google Scholar]
- Dai, W.; Hu, G.; Yang, X.; Yang, X.; Cheng, Y.; Xiong, L.; Josef, S.; Tang, G. Identifying ephemeral gullies from high-resolution images and DEMs using flow-directional detection. J. Mt. Sci. 2020, 17, 3024–3038. [Google Scholar] [CrossRef]
- Hayakawa, Y.; Oguchi, T.; Lin, Z. Comparison of new and existing global digital elevation models: ASTER G-DEM and SRTM-3. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Perlant, F. Using Stereo Images For Digital Terrain Modeling. Surv. Geophys. 2002, 21, 201–207. [Google Scholar] [CrossRef]
- Uysal, M.; Toprak, A.; Polat, N. DEM generation with UAV Photogrammetry and accuracy analysis in Sahitler hill. Measurement 2015, 73, 539–543. [Google Scholar] [CrossRef]
- Milette, S.; Daigneault, R.; Roy, M. Refining the glacial lake coverage of the southern Laurentide ice margin using Lidar-DEM based reconstructions: The case of Lake Obedjiwan in south-central Quebec, Canada. Geomorphology 2019, 342, 78–87. [Google Scholar] [CrossRef]
- Yoo, E.; Kyriakidis, P. Area-to-point Kriging with inequality-type data. J. Geogr. Syst. 2006, 8, 357–390. [Google Scholar] [CrossRef]
- Smelik, R.; Tutenel, T.; Bidarra, R.; Benes, B. A Survey on Procedural Modelling for Virtual Worlds. Comput. Graph. Forum 2014, 33, 31–50. [Google Scholar] [CrossRef]
- Maleika, W. Inverse distance weighting method optimization in the process of digital terrain model creation based on data collected from a multibeam echosounder. Appl. Geomat. 2020, 12, 397–407. [Google Scholar] [CrossRef]
- Reichenbach, S.; Geng, F. Two-dimensional cubic convolution. IEEE Trans. Image Process. 2003, 12, 857–865. [Google Scholar] [CrossRef] [PubMed]
- Krištof, P.; Beneš, B.; Křivánek, J.; Št’ava, O. Hydraulic erosion using smoothed particle hydrodynamics. Comput. Graph. Forum 2009, 28, 219–228. [Google Scholar] [CrossRef]
- Cordonnier, G.; Cani, M.; Benes, B.; Braun, J.; Galin, E. Sculpting Mountains: Interactive terrain modeling based on subsurface geology. IEEE Trans. Vis. Comput. Graph. 2018, 24, 1756–1769. [Google Scholar] [CrossRef]
- Arakawa, K.; Krotkov, E. Fractal surface reconstruction for modeling natural terrain. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 15–17 June 1993; IEEE: Piscataway, NJ, USA, 2002. [Google Scholar]
- Arakawa, K.; Krotkov, E. Fractal modeling of natural terrain: Analysis and surface reconstruction with range data. Graph. Models Image Process. 2002, 58, 413–436. [Google Scholar] [CrossRef]
- Xiang, C.; Jia, Y. Practical algorithm of building Delaunay triangle mesh for terrain modeling. In SPIE Proceedings, Second International Conference on Image and Graphics; SPIE: Bellingham, WA, USA, 2003. [Google Scholar]
- Zhang, H.P.; Zhou, X.X.; Dai, W. A Preliminary on Applicability Analysision of Spatial Interpolation Method. Geogr. Geo-Inf. Sci. 2017, 33, 14–18+105. [Google Scholar]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Han, X.; Ma, X.; Li, H.; Chen, Z. A Global-Information-Constrained Deep Learning Network for Digital Elevation Model Super-Resolution. Remote Sens. 2023, 15, 305. [Google Scholar] [CrossRef]
- Jiang, Z.; Mallants, D.; Peeters, L.; Gao, L.; Camilla, S.; Gregoire, M. High-resolution paleovalley classification from airborne electromagnetic imaging and deep neural network training using digital elevation model data. Hydrol. Earth Syst. Sci. 2019, 23, 2561–2580. [Google Scholar] [CrossRef]
- Perarnau, G.; Weijer, J.; Raducanu, B.; Jose, M. Invertible Conditional GANs for image editing. arXiv 2016, arXiv:1611.06355. [Google Scholar]
- Isola, P.; Zhu, J.; Zhou, T.; Efros, A.A. Image-to-Image Translation with Conditional Adversarial Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Li, S.; Li, K.; Xiong, L.; Tang, G. Generating terrain data for geomorphological analysis by integrating topographical features and conditional generative adversarial networks. Remote Sens. 2022, 14, 1166. [Google Scholar] [CrossRef]
- Jiang, X.; Wang, S.; Li, W.; Wang, G. DEM-cGAN framework constrained by feature lines and elevation range. J. Comput.-Aided Des. Comput. Graph. 2021, 33, 1191–1201. [Google Scholar] [CrossRef]
- Li, S.; Hu, G.; Cheng, X.; Xiong, L.; Tang, G.; Strobl, J. Integrating topographic knowledge into deep learning for the void-filling of digital elevation models. Remote Sens. Environ. 2022, 269, 112818. [Google Scholar] [CrossRef]
- Mukherjee, S.; Joshi, P.; Mukherjee, S.; Ghosh, A.; Grag, R.D.; Mukhopadhyay, A. Evaluation of vertical accuracy of open source Digital Elevation Model (DEM). Int. J. Appl. Earth Obs. Geoinf. 2012, 21, 205–217. [Google Scholar] [CrossRef]
- Kääb, A. Combination of SRTM3 and repeat ASTER data for deriving alpine glacier flow velocities in the Bhutan Himalaya. Remote Sens. Environ. 2004, 94, 463–474. [Google Scholar] [CrossRef]
- Frey, H.; Paul, F. On the suitability of the SRTM DEM and ASTER GDEM for the compilation of topographic parameters in glacier inventories. Int. J. Appl. Earth Obs. Geoinf. 2011, 18, 480–490. [Google Scholar] [CrossRef]
- Tadono, T.; Ishida, H.; Oda, F. Precise global dem generation by alos prism. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 71–76. [Google Scholar] [CrossRef]
- Guerin, É.; Digne, J.; Galin, É.; Peytavie, A.; Wolf, C.; Benes, B.; Martinez, B. Interactive example-based terrain authoring with conditional generative adversarial networks. ACM Trans. Graph. 2017, 36, 228. [Google Scholar] [CrossRef]
- Yang, X.; Tang, G.; Xiao, C.; Gao, Y.; Zhu, S. The scaling method of specific catchment area from DEMs. J. Geogr. Sci. 2011, 21, 689–704. [Google Scholar] [CrossRef]
- Li, S.; Dai, W.; Xiong, L.; Tang, G. Uncertainty of the morphological feature expression of loess erosional gully affected by DEM resolution. J. Geo-Inf. Sci. 2020, 22, 338–350. [Google Scholar]
- Jiang, L.; Gao, C.; Han, X.; Sun, Y.; Zhao, M.; Yang, C. Quantifying spatial similarities of drainage networks on multi-resolution DEMs. J. Geo-Inf. Sci. 2021, 23, 576–583. [Google Scholar]
- Zhu, H.; Tang, G.; Zhang, Y.; Yi, H.; Li, M. Thalweg in loess hill area based on DEM. Bull. Soil Water Conserv. 2003, 23, 43–45,61. [Google Scholar]
- Zhou, Y.; Yang, C.; Li, F.; Chen, R. Spatial distribution and influencing factors of Surface Nibble Degree index in the severe gully erosion region of China’s Loess Plateau. J. Geogr. Sci. 2021, 31, 1575–1597. [Google Scholar] [CrossRef]
- Chen, R.; Zhou, Y.; Wang, Z.; Li, Y.; Li, F.; Yang, F. Towards accurate mapping of loess gully by integrating google earth imagery and DEM using deep learning. Int. Soil Water Conserv. Res. 2023, in press. [CrossRef]
- Liang, W.; Bai, D.; Wang, F.; Fu, B.; Yan, J.; Wang, S.; Yang, Y.; Long, D.; Feng, M. Quantifying the impacts of climate change and ecological restoration on streamflow changes based on a Budyko hydrological model in China’s Loess Plateau. Water Resour. Res. 2015, 51, 6500–6519. [Google Scholar] [CrossRef]
- Zhang, X.; Li, S.; Wang, C.; Tan, W.; Zhao, Z.; Zhang, Y.; Yan, M.; Liu, Y.; Jiang, J.; Xiao, J.; et al. A study of sediment delivery from a small catchment in the loess plateau by the CS-137 method. Chin. Sci. Bull. 1990, 35, 37–42. [Google Scholar]
- Fairfield, J.; Leymarie, P. Drainage networks from grid digital elevation models. Water Resour. Res. 2004, 27, 709–717. [Google Scholar] [CrossRef]
- Yan, S.; Tang, G.; Li, F.; Dong, Y. An edge detection based method for extraction of loess shoulder-line from grid DEM. Geomat. Inf. Sci. Wuhan Univ. 2011, 36, 363–367. [Google Scholar]
- Liu, K.; Ding, H.; Tang, G.; Song, C.; Liu, Y.; Jiang, L.; Zhao, B.; Gao, Y.; Ma, R. Large-scale mapping of gully-affected areas: An approach integrating Google Earth images and terrain skeleton information. Geomorphology 2018, 314, 13–26. [Google Scholar] [CrossRef]
- Surveying Adjustment Discipline Group, School of Surveying and Mapping, Wuhan University. Error Theory and Basis of Measurement Adjustment; Wuhan University Press: Wuhan, China, 2014. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment Name | Purpose of the Experiment |
|---|---|
| Terrain reconstruction experiment based on 5 m DEM + 1 m GEI | Evaluating the accuracy of the CGAN model as a control group |
| Terrain reconstruction experiment based on 12.5 m DEM + 1 m GEI | Investigating the feasibility of the topographic skeleton extracted from the 12.5 m DEM to generate a 5 m DEM |
| Terrain reconstruction experiment based on 30 m DEM + 1 m GEI | Investigating the ability of the topographic skeleton extracted from the 30 m DEM to generate a 5 m DEM |
| Data | Time | Source |
|---|---|---|
| 5 m DEM | 2000–2010 | The National Administration of Surveying in China |
| 12.5 m ALOS DEM 1 | 2006–2011 | https://search.asf.alaska.edu/, accessed on 10 January 2008. |
| 30 m ASTER GDEM | 2000–2013 | https://lpdaac.usgs.gov/products/astgtmv003/, accessed on 12 September 2010. |
| 1 m Google Earth Image | 2006 | https://earthengine.google.com/, accessed on 6 March 2006. |
| Data | Mean | Maximum | Minimum | Standard Deviation | |
|---|---|---|---|---|---|
| A | 5_origin | 1325.92 | 1408 | 1220 | 39.43 |
| 12.5_origin | 1298.16 | 1369 | 1205 | 36.39 | |
| 30_origin | 1322.08 | 1399 | 1229 | 35.33 | |
| Kriging_12.5 | 1298.24 | 1369 | 1205 | 36.33 | |
| Kriging_30 | 1322.35 | 1397 | 1231 | 34.52 | |
| Cublic_12.5 | 1298.13 | 1369 | 1205 | 36.43 | |
| Cublic_30 | 1322.09 | 1399 | 1229 | 35.14 | |
| CGAN_5+1 | 1317.21 | 1398 | 1224 | 41.52 | |
| CGAN12.5+1 | 1322.14 | 1403 | 1225 | 41.29 | |
| CGAN30+1 | 1320.18 | 1401 | 1223 | 39.42 | |
| B | 5_origin | 1322.70 | 1421 | 1232 | 39.40 |
| 12.5_origin | 1297.29 | 1387 | 1218 | 37.26 | |
| 30_origin | 1331.76 | 1412 | 1244 | 37.18 | |
| Kriging_12.5 | 1297.17 | 1385 | 1219 | 36.89 | |
| Kriging_30 | 1331.56 | 1407 | 1249 | 35.38 | |
| Cublic_12.5 | 1297.34 | 1387 | 1218 | 37.26 | |
| Cublic_30 | 1331.66 | 1413 | 1244 | 37.07 | |
| CGAN_5+1 | 1322.43 | 1415 | 1235 | 40.77 | |
| CGAN12.5+1 | 1321.98 | 1415 | 1236 | 40.57 | |
| CGAN30+1 | 1322.39 | 1417 | 1234 | 45.89 | |
| C | 5_origin | 1119.31 | 1217 | 1005 | 51.31 |
| 12.5_origin | 1085.52 | 1187 | 985 | 46.42 | |
| 30_origin | 1119.57 | 1215 | 1010 | 50.68 | |
| Kriging_12.5 | 1085.56 | 1187 | 985 | 46.41 | |
| Kriging_30 | 1119.61 | 1216 | 1010 | 50.64 | |
| Cublic_12.5 | 1085.51 | 1187 | 985 | 46.41 | |
| Cublic_30 | 1119.64 | 1216 | 1010 | 50.64 | |
| CGAN_5+1 | 1115.23 | 1215 | 1009 | 49.80 | |
| CGAN12.5+1 | 1120.34 | 1216 | 1009 | 49.83 | |
| CGAN30+1 | 1121.22 | 1216 | 1011 | 51.12 | |
| D | 5_origin | 1093.66 | 1207 | 1003 | 46.90 |
| 12.5_origin | 1057.47 | 1177 | 979 | 42.77 | |
| 30_origin | 1085.73 | 1198 | 1008 | 42.25 | |
| Kriging_12.5 | 1057.29 | 1177 | 979 | 42.65 | |
| Kriging_30 | 1085.65 | 1198 | 1008 | 42.13 | |
| Cublic_12.5 | 1057.58 | 1177 | 979 | 42.84 | |
| Cublic_30 | 1085.55 | 1198 | 1008 | 42.07 | |
| CGAN_5+1 | 1090.75 | 1202 | 1008 | 42.89 | |
| CGAN12.5+1 | 1096.95 | 1199 | 1007 | 43.16 | |
| CGAN30+1 | 1097.45 | 1197 | 1007 | 43.48 |
| Method | Advantages | Limitations |
|---|---|---|
| Traditional interpolation method | Easy to use and works well for low-relief areas | The accuracy is relatively low in high-relief mountainous areas |
| The proposed method | Works well for areas with a distinct topographic skeleton and can increase the information contained in the training data | Methods are complex and require more priori data |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, K.; Wang, C.; Lu, M.; Dai, W.; Fan, J.; Li, M.; Lei, S. Integrating Topographic Skeleton into Deep Learning for Terrain Reconstruction from GDEM and Google Earth Image. Remote Sens. 2023, 15, 4490. https://doi.org/10.3390/rs15184490
Chen K, Wang C, Lu M, Dai W, Fan J, Li M, Lei S. Integrating Topographic Skeleton into Deep Learning for Terrain Reconstruction from GDEM and Google Earth Image. Remote Sensing. 2023; 15(18):4490. https://doi.org/10.3390/rs15184490
Chicago/Turabian StyleChen, Kai, Chun Wang, Mingyue Lu, Wen Dai, Jiaxin Fan, Mengqi Li, and Shaohua Lei. 2023. "Integrating Topographic Skeleton into Deep Learning for Terrain Reconstruction from GDEM and Google Earth Image" Remote Sensing 15, no. 18: 4490. https://doi.org/10.3390/rs15184490
APA StyleChen, K., Wang, C., Lu, M., Dai, W., Fan, J., Li, M., & Lei, S. (2023). Integrating Topographic Skeleton into Deep Learning for Terrain Reconstruction from GDEM and Google Earth Image. Remote Sensing, 15(18), 4490. https://doi.org/10.3390/rs15184490