


RSS-LIWOM: Rotating Solid-State LiDAR for Robust LiDAR-Inertial-Wheel Odometry and Mapping



Abstract
1. Introduction
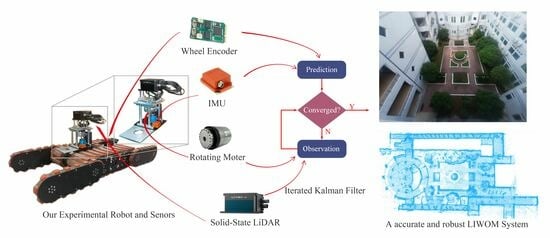
- We designed and implemented an economical rotating sensory platform that effectively expands the horizontal FOV of LiDAR to 360 degrees as shown in Figure 1.
- We propose a multi-source information fusion odometry system that combines the rotation encoding measurements of the rotating platform, IMU measurements, wheel speed odometry, and LiDAR odometry in an iterative extended Kalman filter to obtain robust and accurate pose estimation.
2. Related Work
3. Rotating Sensory Platform and Experimental Robot
3.1. Experimental Platforms
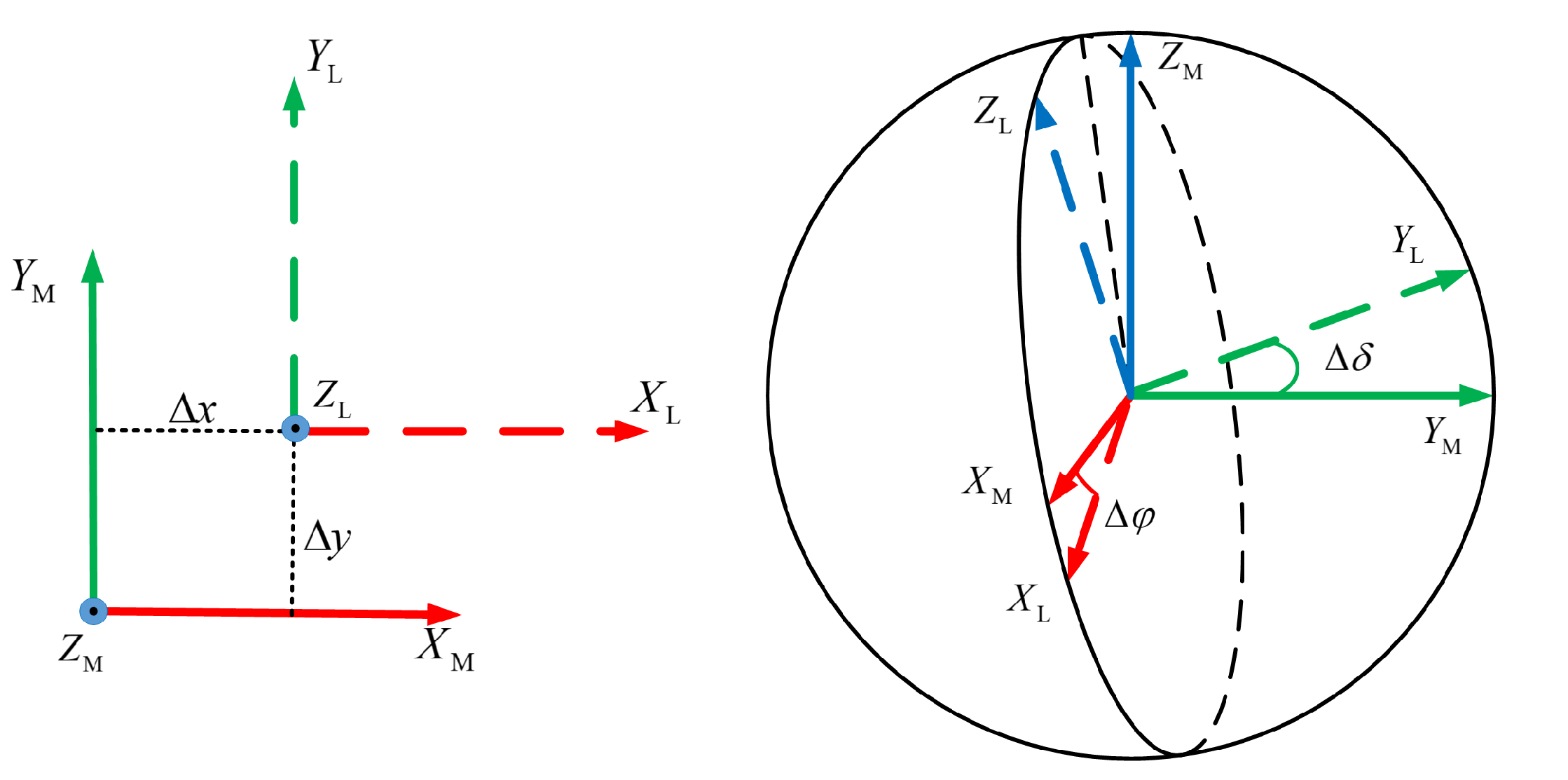
3.2. Extrinsic Calibration
4. LiDAR-Inertial-Wheel Odometry and Mapping
4.1. System Overview
4.2. State Estimation
4.2.1. IMU Integration
4.2.2. Wheel Encoder Residual Computation and State Update
4.2.3. Motion Compensation
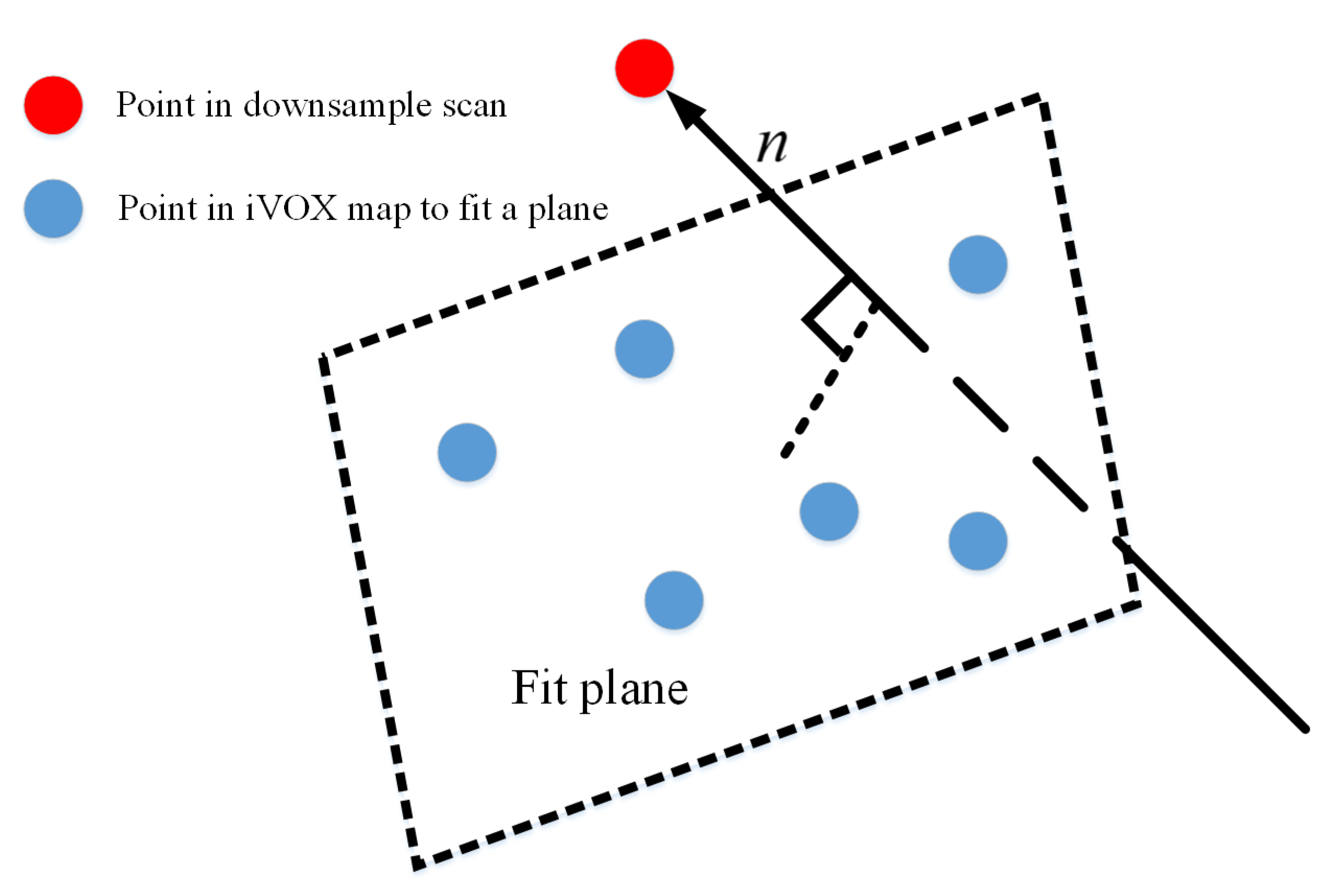
4.2.4. Point Cloud Residual Computation and State Update
| Algorithm 1 State estimation algorithm. |
Input: Last optimal estimation and covariance matrix , LiDAR scan , the sequence of IMU measurements , wheel encoder measurements and the measurements of motor encoder in scan .
|
4.3. Mapping
5. Experiments
5.1. Evaluation on Odometry Estimation
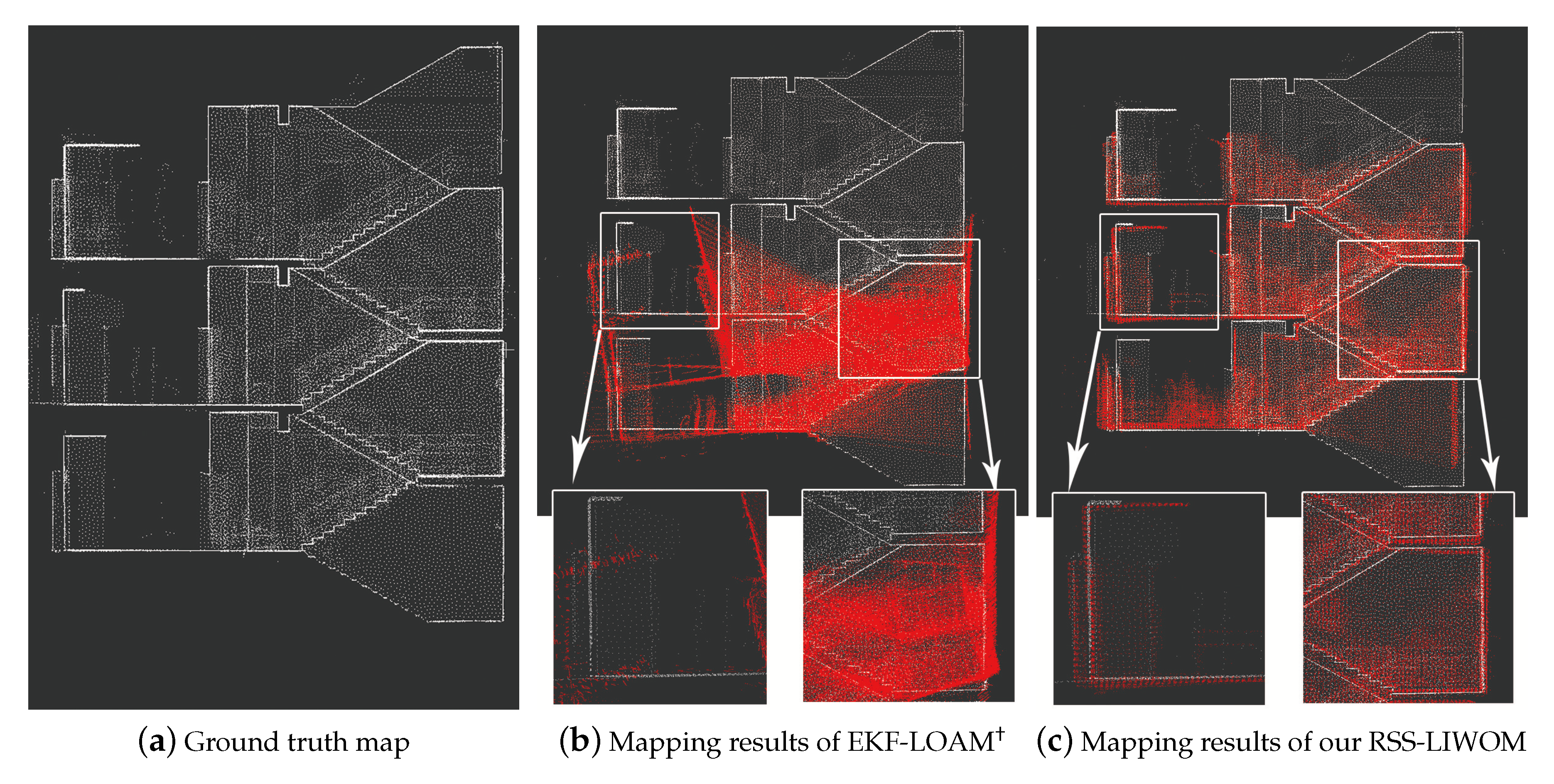
5.2. Evaluation on Mapping Quality
5.3. Smoothness of Velocity Estimation
6. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yan, L.; Dai, J.; Zhao, Y.; Chen, C. Real-Time 3D Mapping in Complex Environments Using a Spinning Actuated LiDAR System. Remote Sens. 2023, 15, 963. [Google Scholar] [CrossRef]
- Chen, W.; Shang, G.; Ji, A.; Zhou, C.; Wang, X.; Xu, C.; Li, Z.; Hu, K. An overview on visual slam: From tradition to semantic. Remote Sens. 2022, 14, 3010. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. (TRO) 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Wang, R.; Wan, W.; Wang, Y.; Di, K. A new RGB-D SLAM method with moving object detection for dynamic indoor scenes. Remote Sens. 2019, 11, 1143. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, Y.; Li, M. Vision-Aided Localization For Ground Robots. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Liu, J.; Gao, W.; Hu, Z. Visual-Inertial Odometry Tightly Coupled with Wheel Encoder Adopting Robust Initialization and Online Extrinsic Calibration. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Xia, X.; Meng, Z.; Han, X.; Li, H.; Tsukiji, T.; Xu, R.; Zheng, Z.; Ma, J. An automated driving systems data acquisition and analytics platform. Transp. Res. Part C Emerg. Technol. 2023, 151, 104120. [Google Scholar] [CrossRef]
- Liu, W.; Xia, X.; Xiong, L.; Lu, Y.; Gao, L.; Yu, Z. Automated vehicle sideslip angle estimation considering signal measurement characteristic. IEEE Sens. J. 2021, 21, 21675–21687. [Google Scholar] [CrossRef]
- Wang, D.; Watkins, C.; Xie, H. MEMS mirrors for LiDAR: A review. Micromachines 2020, 11, 456. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Zhang, F.; Hong, X. Low-Cost Retina-Like Robotic Lidars Based on Incommensurable Scanning. IEEE/ASME Trans. Mechatron. 2022, 27, 58–68. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modeling by registration of multiple range images. In Proceedings of the 1991 IEEE International Conference on Robotics and Automation (ICRA), Sacramento, CA, USA, 9–11 April 1991. [Google Scholar]
- Zhang, Z. Iterative point matching for registration of free-form curves and surfaces. Int. J. Comput. Vis. (IJCV) 1994, 13, 119–152. [Google Scholar] [CrossRef]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-icp. In Proceedings of the Robotics: Science and Systems, Seattle, WA, USA, 28 June–1 July 2009. [Google Scholar]
- Besl, P.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Vizzo, I.; Guadagnino, T.; Mersch, B.; Wiesmann, L.; Behley, J.; Stachniss, C. KISS-ICP: In Defense of Point-to-Point ICP Simple, Accurate, and Robust Registration If Done the Right Way. IEEE Robot. Autom. Lett. (RA-L) 2023, 8, 1029–1036. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. LOAM: Lidar odometry and mapping in real-time. In Proceedings of the Robotics: Science and Systems, Berkeley, CA, USA, 12–16 July 2014. [Google Scholar]
- Shan, T.; Englot, B. LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Lin, J.; Zhang, F. Loam livox: A fast, robust, high-precision LiDAR odometry and mapping package for LiDARs of small FoV. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar]
- Chen, X.; Milioto, A.; Palazzolo, E.; Giguère, P.; Behley, J.; Stachniss, C. SuMa++: Efficient LiDAR-based Semantic SLAM. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Chen, X.; Läbe, T.; Milioto, A.; Röhling, T.; Behley, J.; Stachniss, C. OverlapNet: A Siamese Network for Computing LiDAR Scan Similarity with Applications to Loop Closing and Localization. Auton. Robot. 2021, 46, 61–81. [Google Scholar] [CrossRef]
- Shi, C.; Chen, X.; Huang, K.; Xiao, J.; Lu, H.; Stachniss, C. Keypoint matching for point cloud registration using multiplex dynamic graph attention networks. IEEE Robot. Autom. Lett. 2021, 6, 8221–8228. [Google Scholar] [CrossRef]
- Guadagnino, T.; Chen, X.; Sodano, M.; Behley, J.; Grisetti, G.; Stachniss, C. Fast Sparse LiDAR Odometry Using Self-Supervised Feature Selection on Intensity Images. IEEE Robot. Autom. Lett. 2022, 7, 7597–7604. [Google Scholar] [CrossRef]
- Shi, C.; Chen, X.; Lu, H.; Deng, W.; Xiao, J.; Dai, B. RDMNet: Reliable Dense Matching Based Point Cloud Registration for Autonomous Driving. arXiv 2023, arXiv:2303.18084. [Google Scholar]
- Deng, J.; Chen, X.; Xia, S.; Sun, Z.; Liu, G.; Yu, W.; Pei, L. NeRF-LOAM: Neural Implicit Representation for Large-Scale Incremental LiDAR Odometry and Mapping. arXiv 2023, arXiv:2303.10709. [Google Scholar]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020. [Google Scholar]
- Cattaneo, D.; Vaghi, M.; Valada, A. LCDNet: Deep Loop Closure Detection and Point Cloud Registration for LiDAR SLAM. IEEE Trans. Robot. 2022, 38, 2074–2093. [Google Scholar] [CrossRef]
- Barros, T.; Garrote, L.; Pereira, R.; Premebida, C.; Nunes, U.J. AttDLNet: Attention-based DL Network for 3D LiDAR Place Recognition. arXiv 2021, arXiv:2106.09637. [Google Scholar]
- Xia, Y.; Xu, Y.; Li, S.; Wang, R.; Du, J.; Cremers, D.; Stilla, U. SOE-Net: A Self-Attention and Orientation Encoding Network for Point Cloud based Place Recognition. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021. [Google Scholar]
- Chen, X.; Li, S.; Mersch, B.; Wiesmann, L.; Gall, J.; Behley, J.; Stachniss, C. Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data. IEEE Robot. Autom. Lett. (RA-L) 2021, 6, 6529–6536. [Google Scholar] [CrossRef]
- Chen, X.; Mersch, B.; Nunes, L.; Marcuzzi, R.; Vizzo, I.; Behley, J.; Stachniss, C. Automatic Labeling to Generate Training Data for Online LiDAR-Based Moving Object Segmentation. IEEE Robot. Autom. Lett. (RA-L) 2022, 7, 6107–6114. [Google Scholar] [CrossRef]
- Mersch, B.; Chen, X.; Vizzo, I.; Nunes, L.; Behley, J.; Stachniss, C. Receding Moving Object Segmentation in 3D LiDAR Data Using Sparse 4D Convolutions. IEEE Robot. Autom. Lett. (RA-L) 2022, 7, 7503–7510. [Google Scholar] [CrossRef]
- Liu, W.; Quijano, K.; Crawford, M.M. YOLOv5-Tassel: Detecting Tassels in RGB UAV Imagery with Improved YOLOv5 Based on Transfer Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 8085–8094. [Google Scholar] [CrossRef]
- Meng, Z.; Xia, X.; Xu, R.; Liu, W.; Ma, J. HYDRO-3D: Hybrid Object Detection and Tracking for Cooperative Perception Using 3D LiDAR. IEEE Trans. Intell. Veh. 2023, 1–13. [Google Scholar] [CrossRef]
- Chen, H.; Wu, W.; Zhang, S.; Wu, C.; Zhong, R. A GNSS/LiDAR/IMU Pose Estimation System Based on Collaborative Fusion of Factor Map and Filtering. Remote Sens. 2023, 15, 790. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, H.; Lu, H.; Xiao, J.; Qiu, Q.; Li, Y. Robust SLAM system based on monocular vision and LiDAR for robotic urban search and rescue. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 41–47. [Google Scholar]
- Yang, X.; Lin, X.; Yao, W.; Ma, H.; Zheng, J.; Ma, B. A Robust LiDAR SLAM Method for Underground Coal Mine Robot with Degenerated Scene Compensation. Remote Sens. 2022, 15, 186. [Google Scholar] [CrossRef]
- Zhen, W.; Zeng, S.; Soberer, S. Robust localization and localizability estimation with a rotating laser scanner. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Geneva, P.; Eckenhoff, K.; Yang, Y.; Huang, G. Lips: Lidar-inertial 3d plane slam. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Bry, A.; Bachrach, A.; Roy, N. State estimation for aggressive flight in GPS-denied environments using onboard sensing. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar]
- Xu, C.; Zhang, H.; Gu, J. Scan Context 3D Lidar Inertial Odometry via Iterated ESKF and Incremental K-Dimensional Tree. In Proceedings of the 2022 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 18–20 September 2022. [Google Scholar]
- Sola, J. Quaternion kinematics for the error-state Kalman filter. arXiv 2017, arXiv:1711.02508. [Google Scholar]
- Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Yu, Z. IMU-based Automated Vehicle Body Sideslip Angle and Attitude Estimation Aided by GNSS using Parallel Adaptive Kalman Filters. IEEE Trans. Veh. Technol. 2020, 69, 10668–10680. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Lu, Y.; Gao, L.; Yu, Z. Vehicle sideslip angle estimation by fusing inertial measurement unit and global navigation satellite system with heading alignment. Mech. Syst. Signal Process. 2021, 150, 107290. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous vehicle kinematics and dynamics synthesis for sideslip angle estimation based on consensus kalman filter. IEEE Trans. Control Syst. Technol. 2022, 31, 179–192. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, F. FAST-LIO: A Fast, Robust LiDAR-Inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter. IEEE Robot. Autom. Lett. (RA-L) 2021, 6, 3317–3324. [Google Scholar] [CrossRef]
- Xu, W.; Cai, Y.; He, D.; Lin, J.; Zhang, F. FAST-LIO2: Fast Direct LiDAR-Inertial Odometry. IEEE Trans. Robot. (TRO) 2022, 38, 2053–2073. [Google Scholar] [CrossRef]
- Bai, C.; Xiao, T.; Chen, Y.; Wang, H.; Zhang, F.; Gao, X. Faster-LIO: Lightweight Tightly Coupled Lidar-Inertial Odometry Using Parallel Sparse Incremental Voxels. IEEE Robot. Autom. Lett. (RA-L) 2022, 7, 4861–4868. [Google Scholar] [CrossRef]
- Nießner, M.; Zollhöfer, M.; Izadi, S.; Stamminger, M. Real-time 3D reconstruction at scale using voxel hashing. ACM Trans. Graph. 2013, 32, 1–11. [Google Scholar] [CrossRef]
- Júnior, G.P.C.; Rezende, A.M.C.; Miranda, V.R.F.; Fernandes, R.; Azpúrua, H.; Neto, A.A.; Pessin, G.; Freitas, G.M. EKF-LOAM: An Adaptive Fusion of LiDAR SLAM with Wheel Odometry and Inertial Data for Confined Spaces with Few Geometric Features. IEEE Trans. Autom. Sci. Eng. (T-ASE) 2022, 19, 1458–1471. [Google Scholar] [CrossRef]
- Yuan, Z.; Lang, F.; Xu, T.; Yang, X. LIW-OAM: Lidar-Inertial-Wheel Odometry and Mapping. arXiv 2023, arXiv:2302.14298. [Google Scholar]
- Zhu, F.; Ren, Y.; Zhang, F. Robust real-time lidar-inertial initialization. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022. [Google Scholar]
- Teschner, M. Optimized Spatial Hashing for Collision Detection of Deformable Objects. Vis. Model. Vis. 2003, 3, 47–54. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Meaning |
|---|---|
| The timestamp of the k-th measurements of senor A. | |
| scan and after downsampling in A frame. | |
| true state variables, nominal state variables and error state variables calculated by measurement of senor A. | |
| T is transform from B to A that R is rotation and t is translation. | |
| The coordinate system of world, IMU, LiDAR, wheel odometry and rotating platform. |
| Approach | x Drift (m) | y Drift (m) | z Drift (m) | Accumulated Errors (m) | Error per Meter (m) | Running Time (ms) |
|---|---|---|---|---|---|---|
| FAST-LIO2 | 2.23 | 0.45 | 3.77 | 4.40 | 0.02 | 7 |
| LIO-SAM | 22.16 | 19.21 | 6.69 | 30.06 | 0.12 | 31 |
| EKF-LOAM | - | - | - | - | - | - |
| EKF-LOAM | 1.72 | 0.01 | 1.60 | 2.36 | 0.01 | 11 |
| RSS-LIWOM | 2.64 | 1.11 | 1.53 | 3.25 | 0.02 | 24 |
| RSS-LIWOM | 2.74 | 4.75 | 0.79 | 5.54 | 0.03 | 22 |
| RSS-LIWOM (Ours) | 2.07 | 0.04 | 0.01 | 2.08 | 0.01 | 25 |
| Approach | z Drift (m) | Error per Meter Height (m) | Running Time (ms) |
|---|---|---|---|
| FAST-LIO2 | - | - | - |
| LIO-SAM | - | - | - |
| EKF-LOAM | - | - | - |
| EKF-LOAM | 5.14 | 0.67 | 7 |
| RSS-LIWOM | 3.29 | 0.43 | 8 |
| RSS-LIWOM | 1.64 | 0.21 | 8 |
| RSS-LIWOM (Ours) | 0.44 | 0.06 | 9 |
| Scene | Method | Chamfer Distance | Cover Rate (%) | Number of Points |
|---|---|---|---|---|
| Campus | FAST-LIO2 | 1.44 | 16.2 | |
| EKF-LOAM | 0.69 | 62.7 | ||
| RSS-LIWOM (Ours) | 0.67 | 70.2 | ||
| Stairway | FAST-LIO2 | - | - | - |
| EKF-LOAM | 1.50 | 36.2 | ||
| RSS-LIWOM (Ours) | 0.37 | 70.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, S.; Shi, C.; Zhang, H.; Lu, H.; Zeng, Z.; Chen, X. RSS-LIWOM: Rotating Solid-State LiDAR for Robust LiDAR-Inertial-Wheel Odometry and Mapping. Remote Sens. 2023, 15, 4040. https://doi.org/10.3390/rs15164040
Gong S, Shi C, Zhang H, Lu H, Zeng Z, Chen X. RSS-LIWOM: Rotating Solid-State LiDAR for Robust LiDAR-Inertial-Wheel Odometry and Mapping. Remote Sensing. 2023; 15(16):4040. https://doi.org/10.3390/rs15164040
Chicago/Turabian StyleGong, Shunjie, Chenghao Shi, Hui Zhang, Huimin Lu, Zhiwen Zeng, and Xieyuanli Chen. 2023. "RSS-LIWOM: Rotating Solid-State LiDAR for Robust LiDAR-Inertial-Wheel Odometry and Mapping" Remote Sensing 15, no. 16: 4040. https://doi.org/10.3390/rs15164040
APA StyleGong, S., Shi, C., Zhang, H., Lu, H., Zeng, Z., & Chen, X. (2023). RSS-LIWOM: Rotating Solid-State LiDAR for Robust LiDAR-Inertial-Wheel Odometry and Mapping. Remote Sensing, 15(16), 4040. https://doi.org/10.3390/rs15164040