
Research on the Adaptability of Typical Denoising Algorithms Based on ICESat-2 Data



Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Description and Experimental Area
2.1.1. ICESat-2 Data
2.1.2. Airborne LiDAR Data and Experimental Area
2.2. Methods
2.2.1. The DRAGANN Algorithm
2.2.2. The RBF Algorithm
2.2.3. The DBSCAN Algorithm
2.2.4. Accuracy Verification
3. Results
3.1. Analysis of the Effect of FVC on the Denoising Results of Three Algorithms
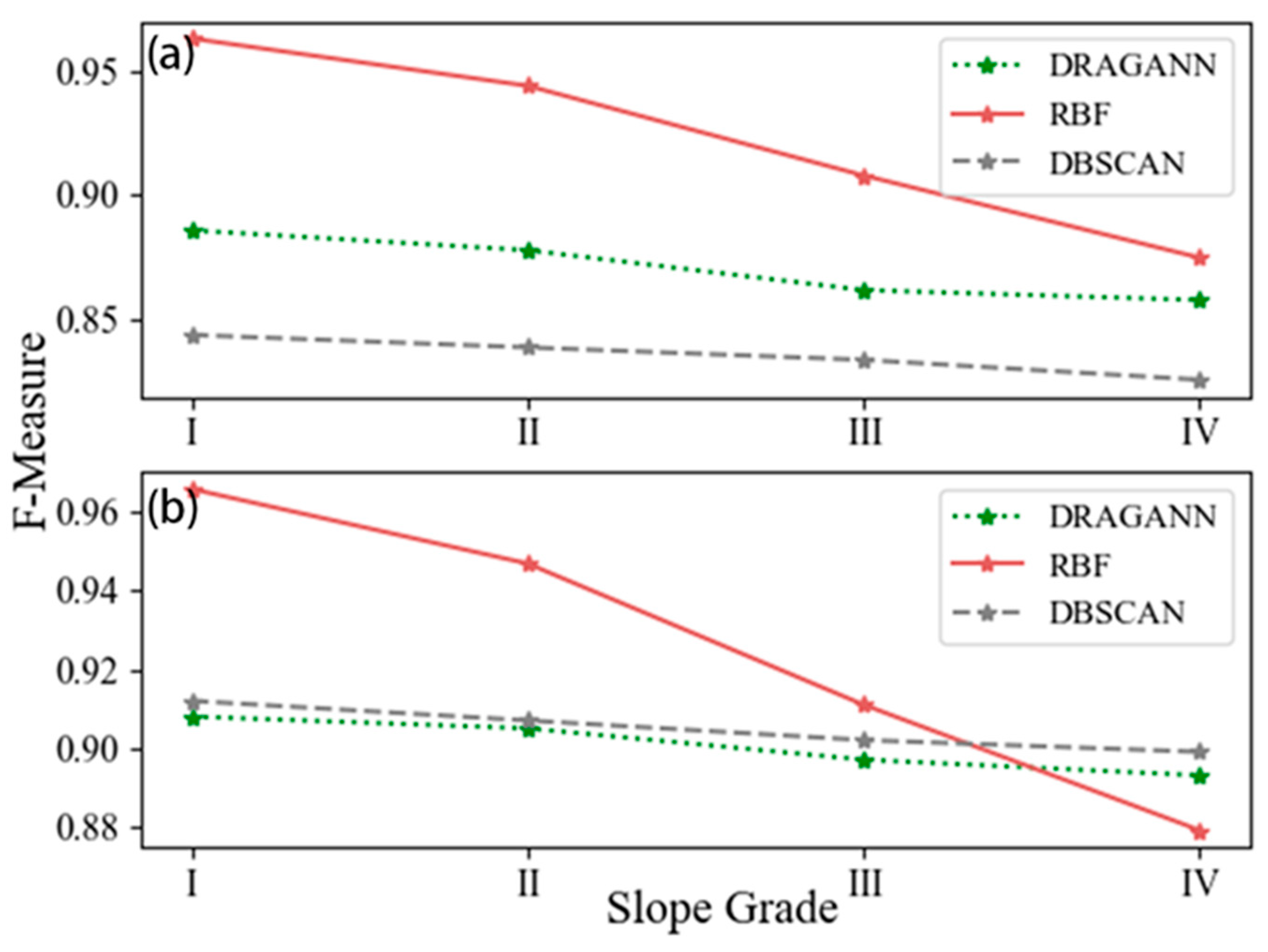
3.2. Analysis of the Effect of Slope on the Denoising Results of Three Algorithms
3.3. Analysis of the Effect of Observation Time on the Denoising Results of Three Algorithms
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sui, L.; Zhang, B. The Basic Principle And Development Of LiDAR Remote Sensing. J. Surv. Mapp. Sci. Technol. 2006, 2, 127–129. [Google Scholar] [CrossRef]
- Vosselman, G.; Maas, H. Airborne and Terrestrial Laser Scanning; Whittles Publishing: Dunbeath, UK; CRC Press: Scotland, UK, 2010; pp. 204–205. [Google Scholar]
- Gong, W.; Shi, S.; Chen, B.; Song, S.; Niu, Z.; Wang, C.; Guan, H.; Li, W.; Gao, S.; Lin, Y.; et al. Development of Hyperspectral LiDAR for Earth Observation and Prospects. J. Remote Sens. 2021, 25, 501–513. [Google Scholar] [CrossRef]
- Zhang, H.; Ding, Y.; Huang, G. Photon counting laser bathymetry system. Infrared Laser Eng. 2019, 48, 100–104. [Google Scholar] [CrossRef]
- Fayad, I.; Baghdadi, N.; Alcarde Alvares, C.; Stape, J.L.; Bailly, J.S.; Scolforo, H.F.; Cegatta, I.R.; Zribi, M.; Le Maire, G. Terrain Slope Effect on Forest Height and Wood Volume Estimation from GEDI Data. Remote Sens. 2021, 13, 2136. [Google Scholar] [CrossRef]
- Cheng, Y.; Liu, X.; Tan, Z.; Wang, S.; Wei, S. Research and development of spaceborne solid state laser technology for laser altimeter. Infrared Laser Eng. 2020, 49, 55–64. [Google Scholar] [CrossRef]
- Smith, B.; Fricker, H.A.; Gardner, A.S.; Medley, B.; Nilsson, J.; Paolo, F.S.; Holschuh, N.; Adusumilli, S.; Brunt, K.; Csatho, B.; et al. Pervasive Ice Sheet Mass Loss Reflects Competing Ocean and Atmosphere Processes. Science 2020, 368, 1239–1242. [Google Scholar] [CrossRef]
- Kwok, R.; Kacimi, S.; Webster, M.A.; Kurtz, N.T.; Petty, A.A. Arctic Snow Depth and Sea Ice Thickness From ICESat-2 and CryoSat-2 Freeboards: A First Examination. J. Geophys. Res. Ocean. 2020, 125, e2019JC016008. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, C.; Xi, X.; Nie, S.; Yang, X.; Li, D. Research Progress of ICESat-2 Satellite Photon Counting LiDAR Data Processing and Applications. Infrared Laser Eng. 2020, 49, 76–85. [Google Scholar] [CrossRef]
- Lao, J.; Wang, C.; Nie, S.; Xi, X.; Wang, J. Monitoring and Analysis of Water Level Changes in Mekong River from ICESat-2 Spaceborne Laser Altimetry. Water 2022, 14, 1613. [Google Scholar] [CrossRef]
- Narine, L.L.; Popescu, S.; Neuenschwander, A.; Zhou, T.; Srinivasan, S.; Harbeck, K. Estimating Aboveground Biomass and Forest Canopy Cover with Simulated ICESat-2 Data. Remote Sens. Environ. 2019, 224, 112234. [Google Scholar] [CrossRef]
- Zhang, J.; Tian, J.; Li, X.; Wang, L.; Chen, B.; Gong, H.; Ni, R.; Zhou, B.; Yang, C. Leaf Area Index Retrieval with ICESat-2 Photon Counting LiDAR. Int. J. Appl. Earth Obs. Geoinf. 2021, 103, 102488. [Google Scholar] [CrossRef]
- Zhu, L.; Huang, G.; Ouyang, J.; Shu, R.; Wang, J. Study of Photon Counting Imaging Lidar Time Interval Measurement System. J. Infrared Millim. Waves 2008, 27, 461–464. [Google Scholar] [CrossRef]
- Lu, D.; Li, D.; Zhu, X.; Nie, S.; Zhou, G.; Zhang, X.; Yang, C. ICESat-2 Photon Point Cloud Denoising Classification Based on Convolutional Neural Network. J. Geoinf. Sci. 2021, 23, 2086–2095. [Google Scholar] [CrossRef]
- Awadallah, M.; Ghannam, S.; Abbott, L.; Ghanem, A. Active Contour Models for Extracting Ground and Forest Canopy Curves from Discrete Laser Altimeter Data. In Proceedings of the 13th International Conference on LiDAR Applications for Assessing Forest Ecosystems, Beijing, China, 1 January 2013. [Google Scholar]
- Xie, F.; Yang, G.; Shu, R.; Li, M. An Adaptive Directional Filter for Photon Counting LiDAR Point Cloud Data. J. Infrared Millim. Waves 2017, 36, 107–113. [Google Scholar] [CrossRef]
- Nie, S.; Wang, C.; Xi, X.; Luo, S.; Li, G.; Tian, J.; Wang, H. Estimating the Vegetation Canopy Height Using Micro-Pulse Photon-Counting LiDAR Data. Opt. Express 2018, 26, 520–540. [Google Scholar] [CrossRef]
- Xia, S.; Wang, C.; Xi, X.; Luo, S.; Zeng, H. Point Cloud Filtering and Tree Height Estimation Using Airborne Experiment Data of ICESat-2. J. Remote Sens. 2014, 18, 1199–1207. [Google Scholar] [CrossRef]
- Herzfeld, U.C.; McDonald, B.W.; Wallin, B.F.; Neumann, T.A.; Markus, T.; Brenner, A.; Field, C. Algorithm for Detection of Ground and Canopy Cover in Micropulse Photon-Counting LiDAR Altimeter Data in Preparation for the ICESat-2 Mission. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2109–2125. [Google Scholar] [CrossRef]
- Wang, X.; Pan, Z.; Glennie, C. A Novel Noise Filtering Model for Photon-Counting Laser Altimeter Data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 947–951. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Menlo Park, CA, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Zhu, X.; Nie, S.; Wang, C.; Xi, X.; Wang, J.; Li, D.; Zhou, H. A Noise Removal Algorithm Based on OPTICS for Photon-Counting LiDAR Data. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1471–1475. [Google Scholar] [CrossRef]
- Meng, W.; Li, J.; Zhang, K.; Liu, C.; Tang, Q. De-noising and Accuracy Evaluation of ICESAT-2 Sea Surface Data Based on DBSCAN Algorithm. Mar. Sci. Bull. 2021, 40, 675–682. [Google Scholar] [CrossRef]
- Huang, X.; Cheng, F.; Wang, J.; Duan, P.; Wang, J. Forest Canopy Height Extraction Method Based on ICESat-2/ATLAS Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–14. [Google Scholar] [CrossRef]
- Li, M.; Guo, Y.; Yang, G.; Shu, R. A Noise Filter Method for the Push-broom Photon Counting LiDAR and Airborne Cloud Data Verification. Sci. Technol. Eng. 2017, 17, 53–58. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, X.; Ma, Y.; Xu, N.; Zhang, W.; Li, S. Signal Photon Extraction Method for Weak Beam Data of ICESat-2 Using Information Provided by Strong Beam Data in Mountainous Areas. Remote Sens. 2021, 13, 863. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Pitts, K. The ATL08 Land and Vegetation Product for the ICESat-2 Mission. Remote Sens. Environ. 2019, 221, 247–259. [Google Scholar] [CrossRef]
- Zhao, S. United States National Ecological Observatory Network-with Special References to its Concepts, Desing and Progress. Adv. Earth Sci. 2005, 20, 578–583. [Google Scholar]
- Luo, H.; Yang, C. Analysis of Vegetation Cover Dynamics and Driving Forces in the Upper Yangtze River for the Past 19 Years. Ecol. Sci. 2023, 42, 234–241. [Google Scholar] [CrossRef]
- He, S.; Zou, F.; Wang, J. Ecological sensitivity evaluation of Longnan County based on AHP and MSE weighting method. Chin. J. Ecol. 2021, 40, 2927–2935. [Google Scholar] [CrossRef]
- Zhang, J.; Kerekes, J. An adaptive density-based model for extracting surface returns from photon-counting laser altimeterdata. IEEE Geosci. Remote Sens. Lett. 2014, 12, 726–730. [Google Scholar] [CrossRef]
- Chen, B.; Pang, Y.; Li, Z.; Lu, H.; Liu, L.; North, P.R.J.; Rosette, J.A.B. Ground and Top of Canopy Extraction from Photon-Counting LiDAR Data Using Local Outlier Factor with Ellipse Searching Area. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1447–1451. [Google Scholar] [CrossRef] [Green Version]
- Cao, B.; Fang, Y.; Jiang, Z.; Gao, L.; Hu, H. Implementation and Accuracy Evaluation of ICESat-2 ATL08 Denoising Algorithms. Bull. Surv. Mapp. 2020, 518, 25–30. [Google Scholar] [CrossRef]
- Huang, J.; Xing, Y.; You, H.; Qin, L.; Tian, J.; Ma, J. Particle Swarm Optimization-Based Noise Filtering Algorithm for Photon Cloud Data in Forest Area. Remote Sens. 2019, 11, 980. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Xing, Y.; Qin, L.; Ma, j. Accuracy of Photon Cloud Noise Filtering Algorithm in Forest Area under Weak Beam Conditions. Trans. Chin. Soc. Agric. Mach. 2020, 51, 164–172. [Google Scholar] [CrossRef]
- Nie, S. Inversion Method of Forest Canopy Parameters Based on LiDAR Data; University of Chinese Academy of Sciences (Institute of Remote Sensing and Digital Earth Research, Chinese Academy of Sciences): Beijing, China, 2017. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | NEON Site Name | ICESat-2/ATL03 Time | FVC | Number | NEON Site Name | ICESat-2/ATL03 Time | Slope |
|---|---|---|---|---|---|---|---|
| Data1 | MOAB | 2022.07.13.Daytime | Ⅰ | Data9 | MOAB | 2022.07.13.Daytime | Ⅰ |
| Data2 | MOAB | 2020.09.21.Night | Ⅰ | Data10 | MOAB | 2020.09.21.Night | Ⅰ |
| Data3 | ONAQ | 2022.07.31.Daytime | Ⅱ | Data11 | MOAB | 2021.09.16.Daytime | Ⅱ |
| Data4 | ONAQ | 2022.07.31.Night | Ⅱ | Data12 | MOAB | 2020.04.17.Night | Ⅱ |
| Data5 | BART | 2020.07.03.Daytime | Ⅲ | Data13 | NIWO | 2021.08.27.Daytime | Ⅲ |
| Data6 | BART | 2019.09.03.Night | Ⅲ | Data14 | NIWO | 2020.06.02.Night | Ⅲ |
| Data7 | HARV | 2022.07.07.Daytime | Ⅳ | Data15 | NIWO | 2021.08.27.Daytime | Ⅳ |
| Data8 | HARV | 2020.08.09.Night | Ⅳ | Data16 | NIWO | 2020.06.02.Night | Ⅳ |
| Number | DRAGANN Algorithm | RBF Algorithm | DBSCAN Algorithm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| R | P | F | R | P | F | R | P | F | |
| Data1 | 1 | 0.795 | 0.886 | 0.999 | 0.930 | 0.963 | 1 | 0.730 | 0.844 |
| Data2 | 1 | 0.832 | 0.908 | 1 | 0.934 | 0.966 | 0.998 | 0.840 | 0.952 |
| Data3 | 1 | 0.799 | 0.888 | 1 | 0.921 | 0.959 | 1 | 0.726 | 0.841 |
| Data4 | 1 | 0.859 | 0.924 | 1 | 0.925 | 0.961 | 1 | 0.859 | 0.924 |
| Data5 | 0.944 | 0.890 | 0.916 | 0.942 | 0.897 | 0.919 | 0.941 | 0.887 | 0.913 |
| Data6 | 1 | 0.901 | 0.948 | 0.998 | 0.903 | 0.948 | 0.998 | 0.912 | 0.953 |
| Data7 | 0.928 | 0.824 | 0.873 | 0.976 | 0.872 | 0.921 | 0.925 | 0.798 | 0.857 |
| Data8 | 0.982 | 0.874 | 0.925 | 0.998 | 0.857 | 0.922 | 0.897 | 0.887 | 0.892 |
| Environmental Factors | DRAGANN Algorithm | RBF Algorithm | DBSCAN Algorithm | |||
|---|---|---|---|---|---|---|
| Daytime | Night | Daytime | Night | Daytime | Night | |
| FVC | 0.024 | 0.021 | 0.016 | 0.015 | 0.044 | 0.039 |
| Number | DRAGANN Algorithm | RBF Algorithm | DBSCAN Algorithm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| R | P | F | R | P | F | R | P | F | |
| Data9 | 1 | 0.795 | 0.886 | 0.999 | 0.930 | 0.963 | 1 | 0.730 | 0.844 |
| Data10 | 1 | 0.832 | 0.908 | 1 | 0.934 | 0.966 | 0.998 | 0.840 | 0.912 |
| Data11 | 1 | 0.783 | 0.878 | 0.978 | 0.912 | 0.944 | 1 | 0.723 | 0.839 |
| Data12 | 1 | 0.826 | 0.905 | 0.988 | 0.909 | 0.947 | 1 | 0.830 | 0.907 |
| Data13 | 1 | 0.757 | 0.862 | 0.961 | 0.861 | 0.908 | 1 | 0.715 | 0.834 |
| Data14 | 1 | 0.813 | 0.897 | 0.981 | 0.850 | 0.911 | 1 | 0.821 | 0.902 |
| Data15 | 1 | 0.751 | 0.858 | 0.953 | 0.809 | 0.875 | 1 | 0.704 | 0.826 |
| Data16 | 1 | 0.807 | 0.893 | 0.959 | 0.811 | 0.879 | 1 | 0.817 | 0.899 |
| Time | DRAGANN Algorithm | RBF Algorithm | DBSCAN Algorithm |
|---|---|---|---|
| Daytime | 0.880 | 0.927 | 0.850 |
| Night | 0.914 | 0.933 | 0.930 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kui, M.; Xu, Y.; Wang, J.; Cheng, F. Research on the Adaptability of Typical Denoising Algorithms Based on ICESat-2 Data. Remote Sens. 2023, 15, 3884. https://doi.org/10.3390/rs15153884
Kui M, Xu Y, Wang J, Cheng F. Research on the Adaptability of Typical Denoising Algorithms Based on ICESat-2 Data. Remote Sensing. 2023; 15(15):3884. https://doi.org/10.3390/rs15153884
Chicago/Turabian StyleKui, Mengyun, Yunna Xu, Jinliang Wang, and Feng Cheng. 2023. "Research on the Adaptability of Typical Denoising Algorithms Based on ICESat-2 Data" Remote Sensing 15, no. 15: 3884. https://doi.org/10.3390/rs15153884
APA StyleKui, M., Xu, Y., Wang, J., & Cheng, F. (2023). Research on the Adaptability of Typical Denoising Algorithms Based on ICESat-2 Data. Remote Sensing, 15(15), 3884. https://doi.org/10.3390/rs15153884