

Research on Landslide Trace Recognition by Fusing UAV-Based LiDAR DEM Multi-Feature Information


Abstract
:1. Introduction
2. Study Area and Data
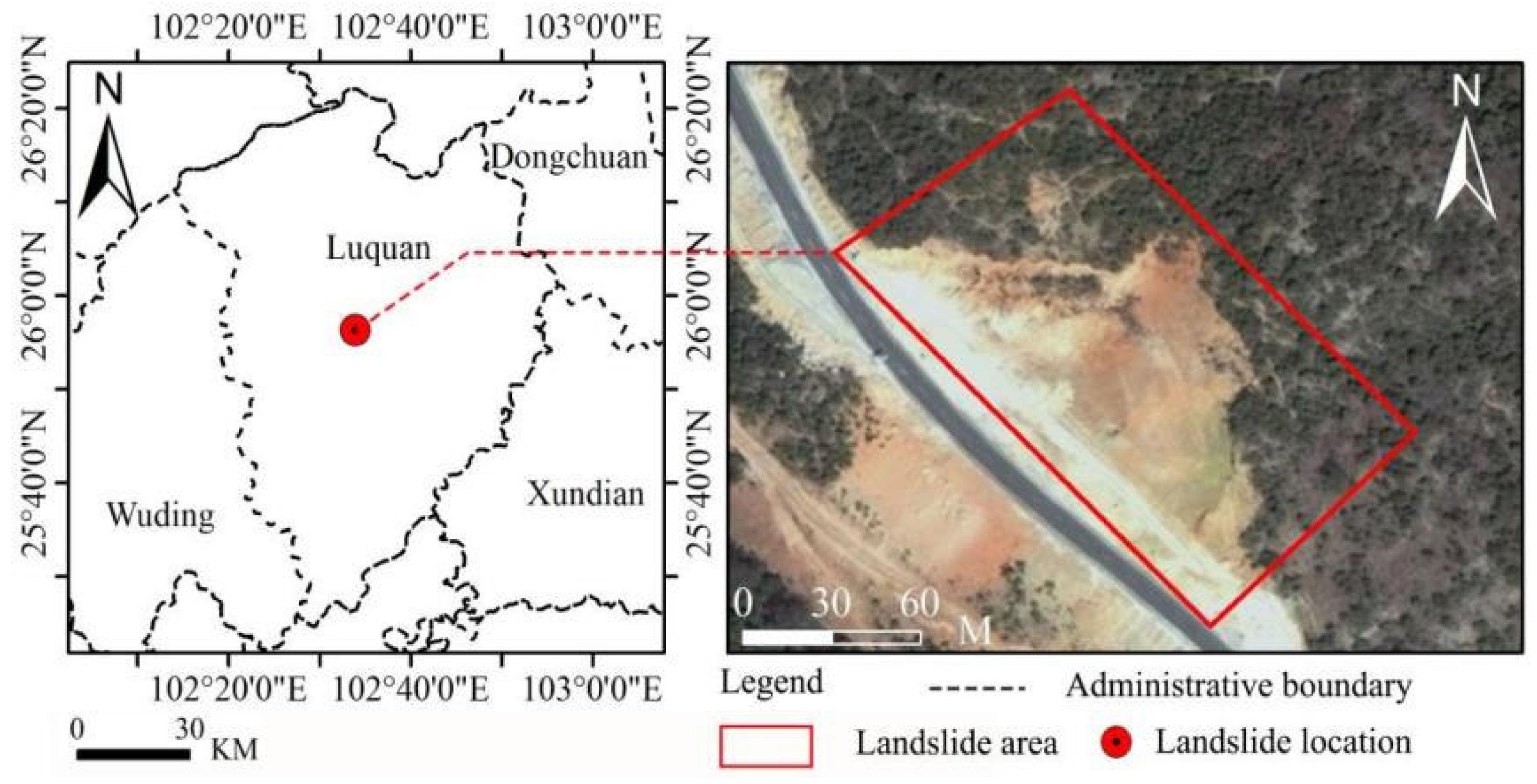
2.1. Overview of the Study Area
2.2. Data Acquisition and Processing
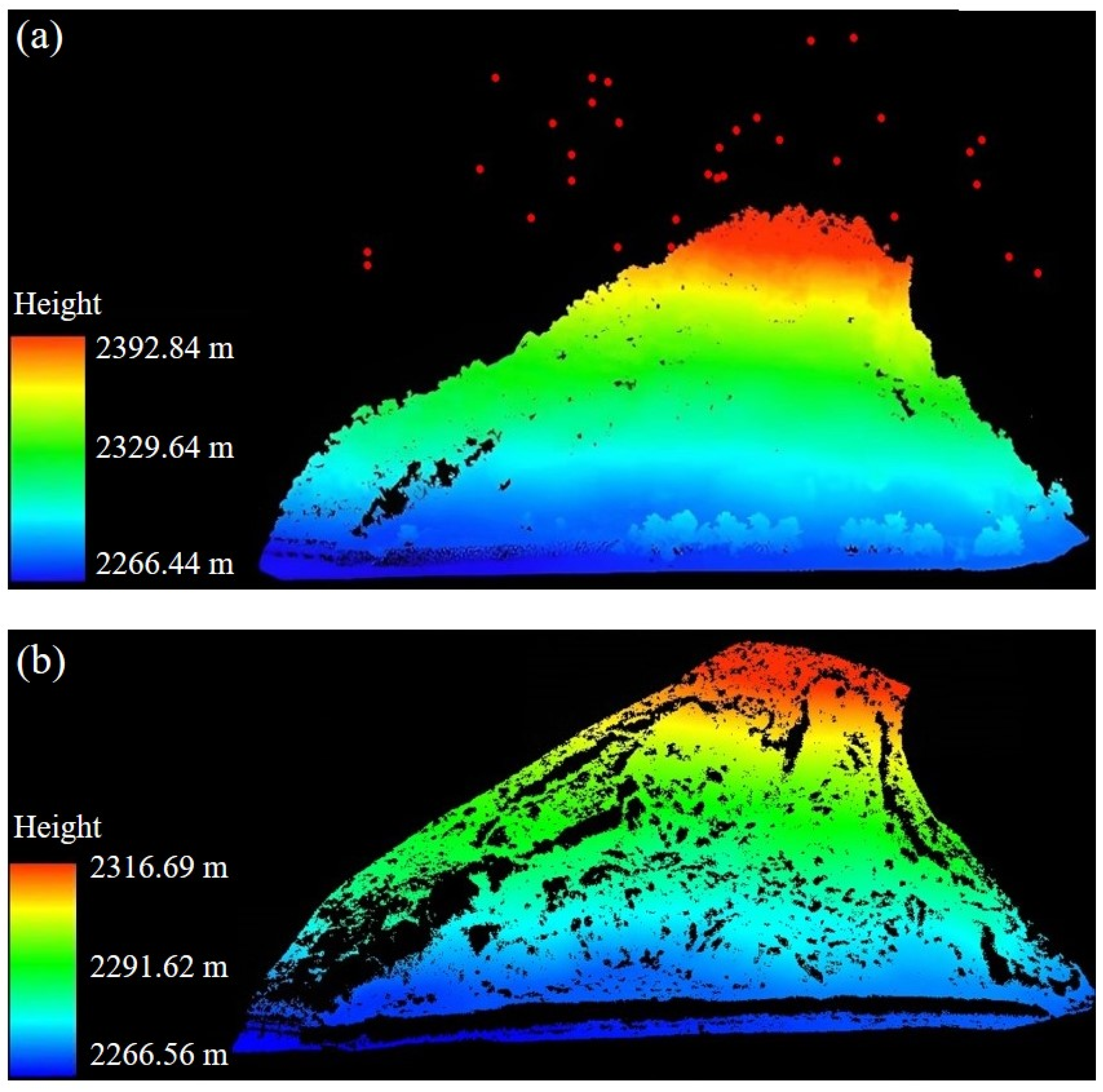
2.2.1. Point Cloud Data Acquisition
2.2.2. Construction of DEM Multi-Feature Images
3. Landslide Traces Feature Recognition
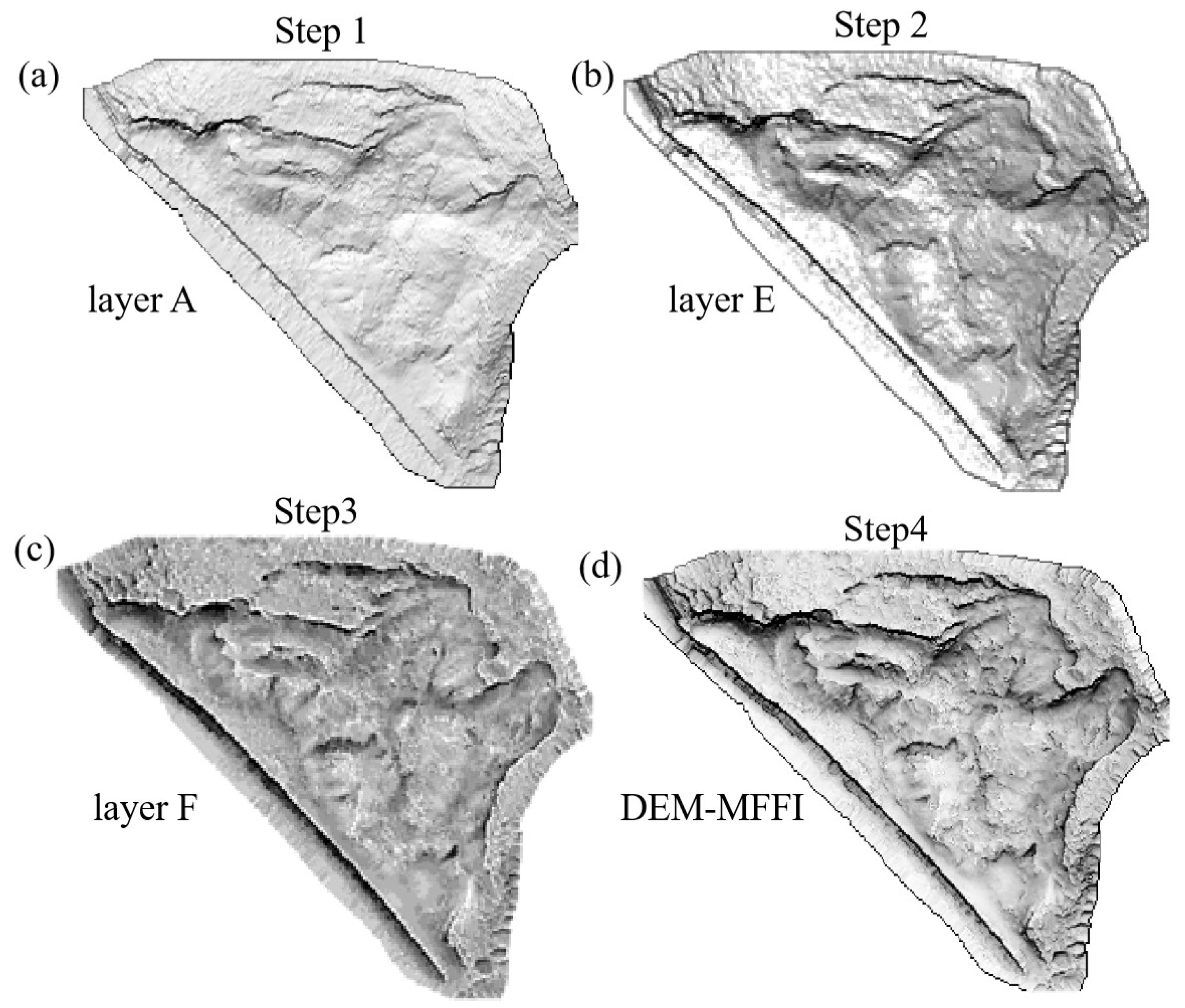
3.1. DEM Multi-Feature Image Fusion Method
3.2. Landslide Traces Feature Recognition
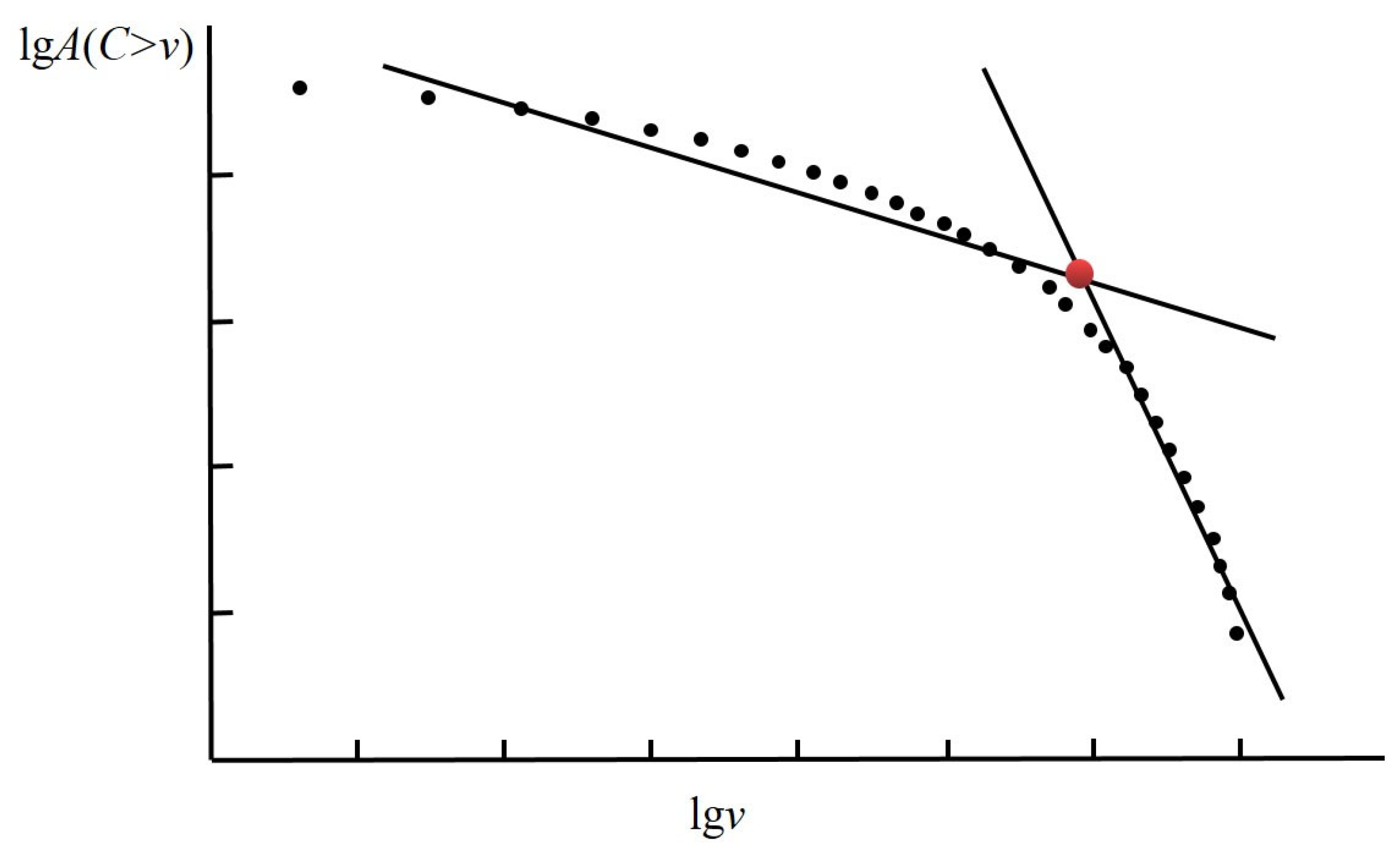
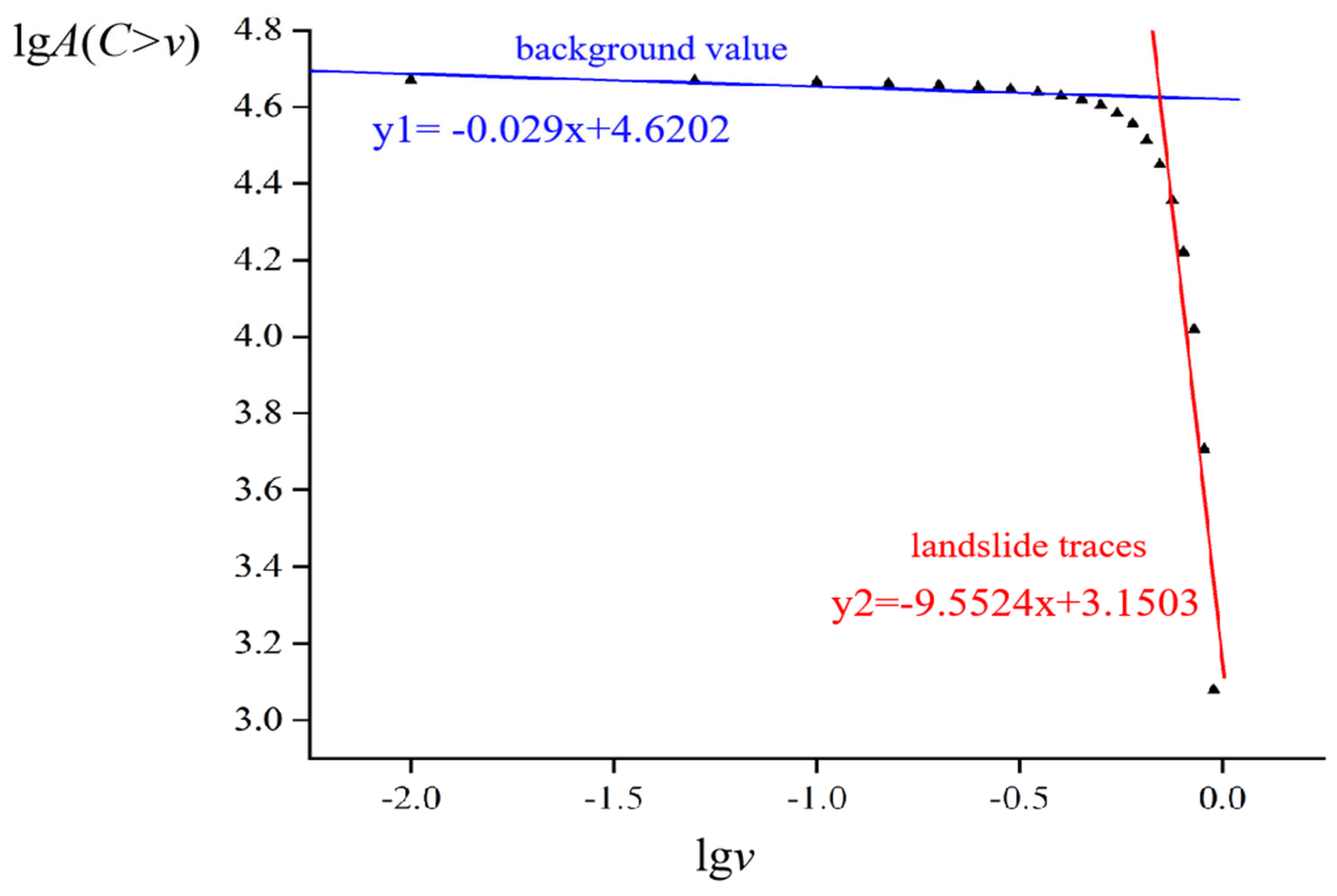
3.2.1. Coarse Recognition of Landslide Traces Based on Fractal Theory
3.2.2. Landslide Traces Contour Extraction
4. Results
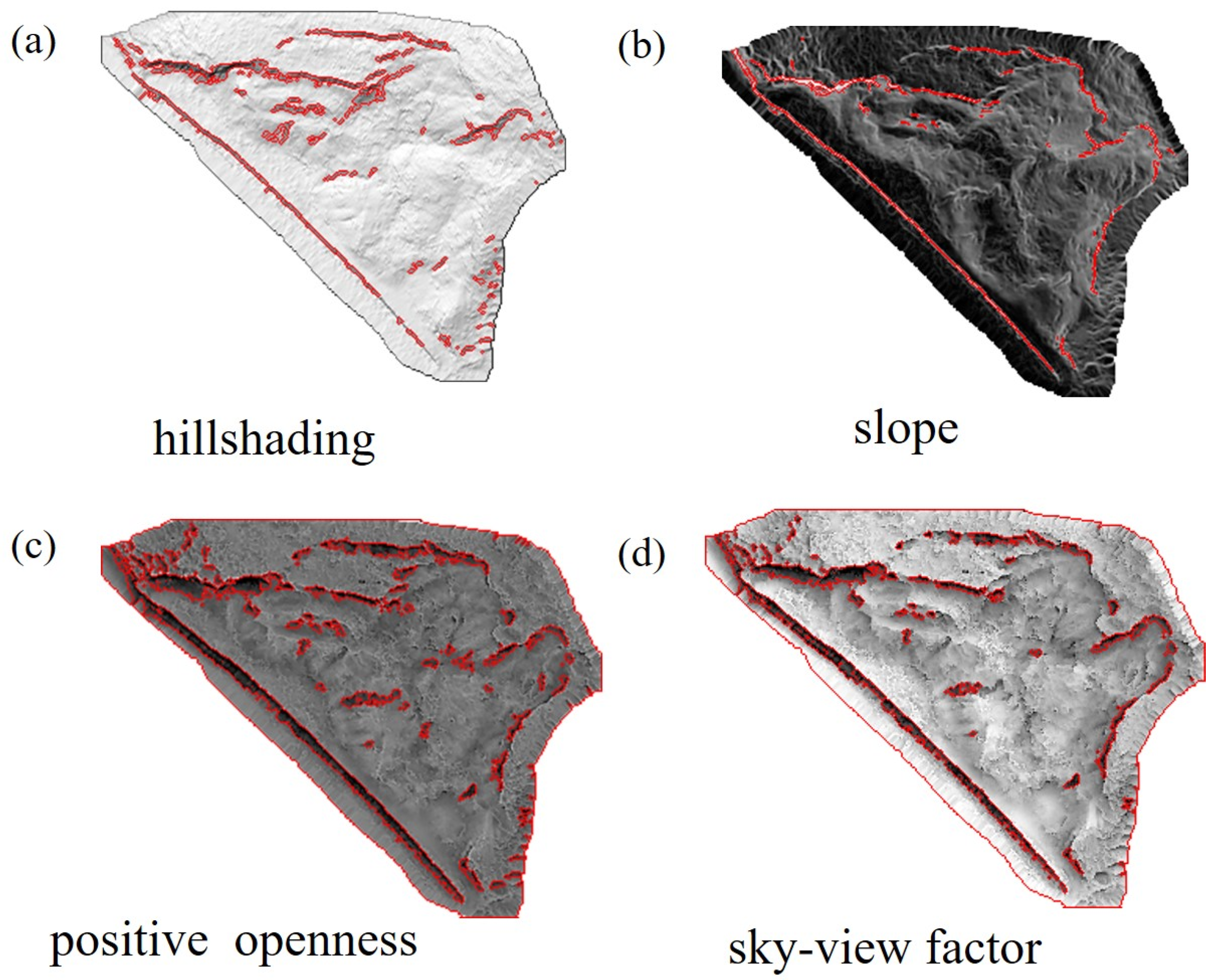
4.1. Results of DEM Multi-Feature Image Construction
4.2. DEM Construction Results of the DEM Multi-Feature Fusion Image
4.3. Recognition Results of Landslide Traces Based on Fractal Theory
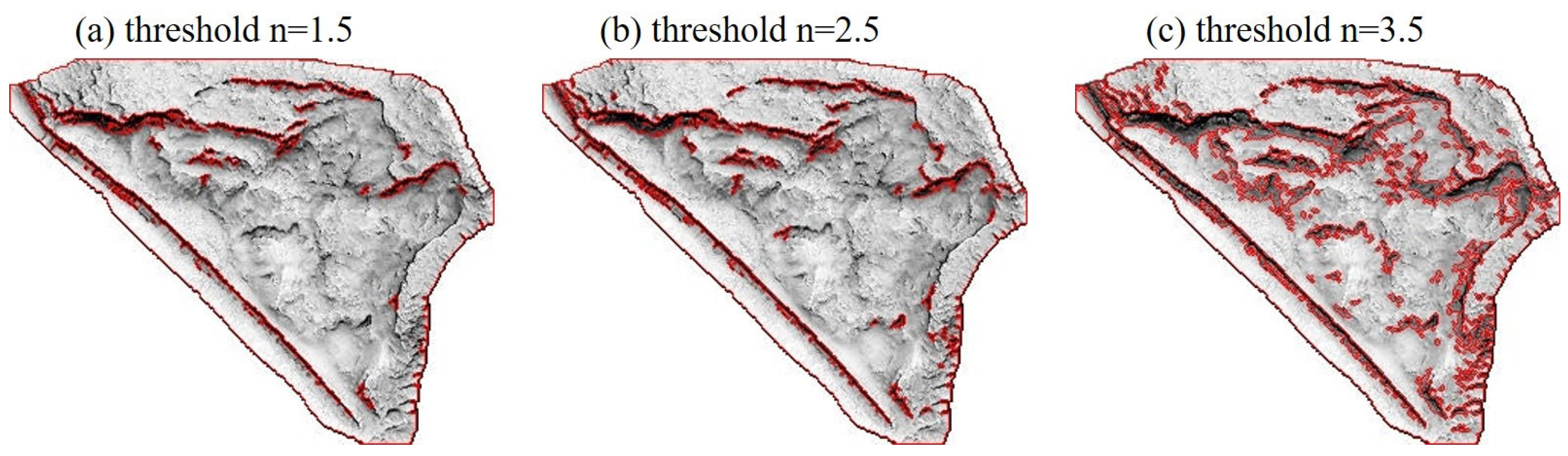
4.3.1. Coarse Recognition of Landslide Traces Based on C-A Fractal
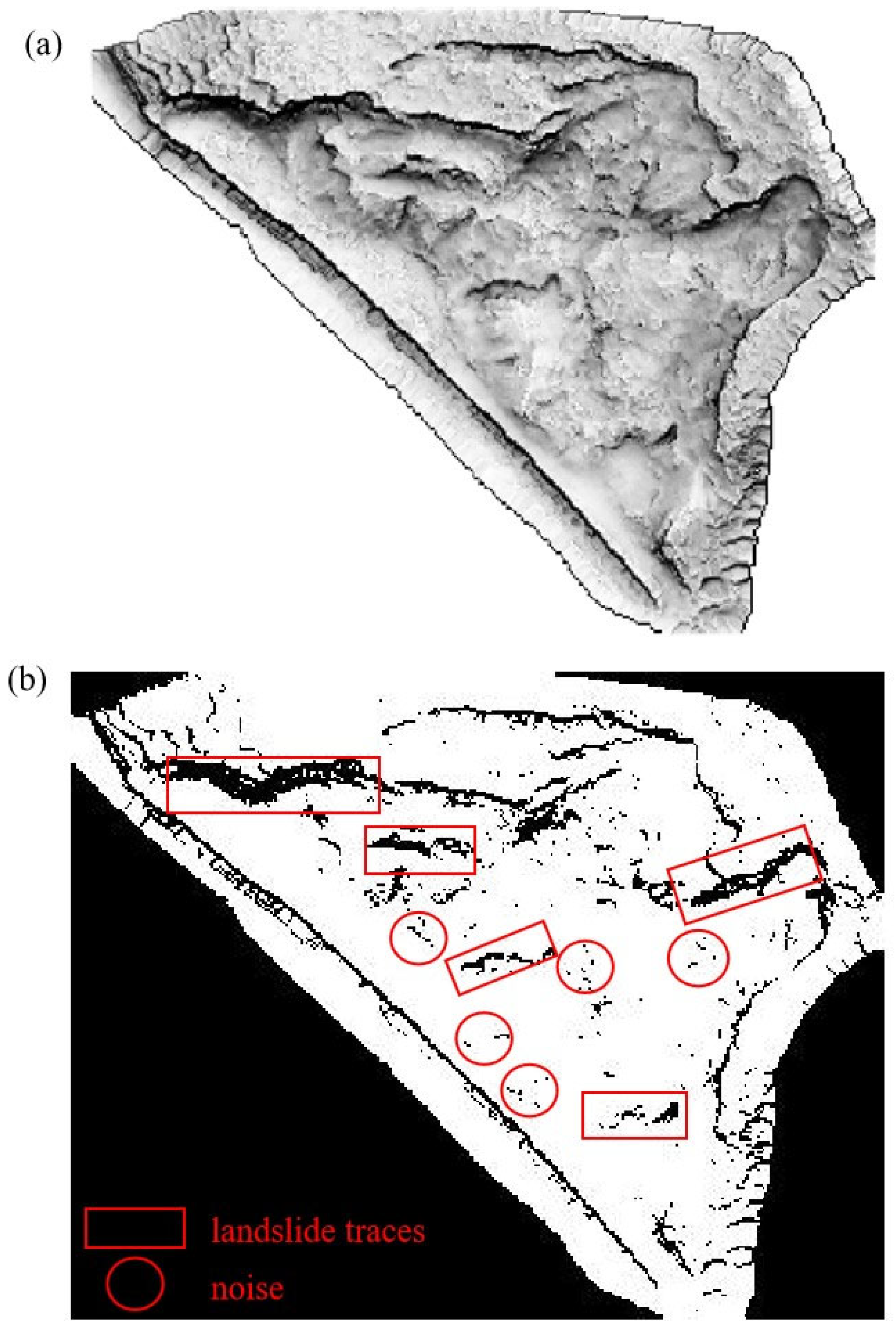
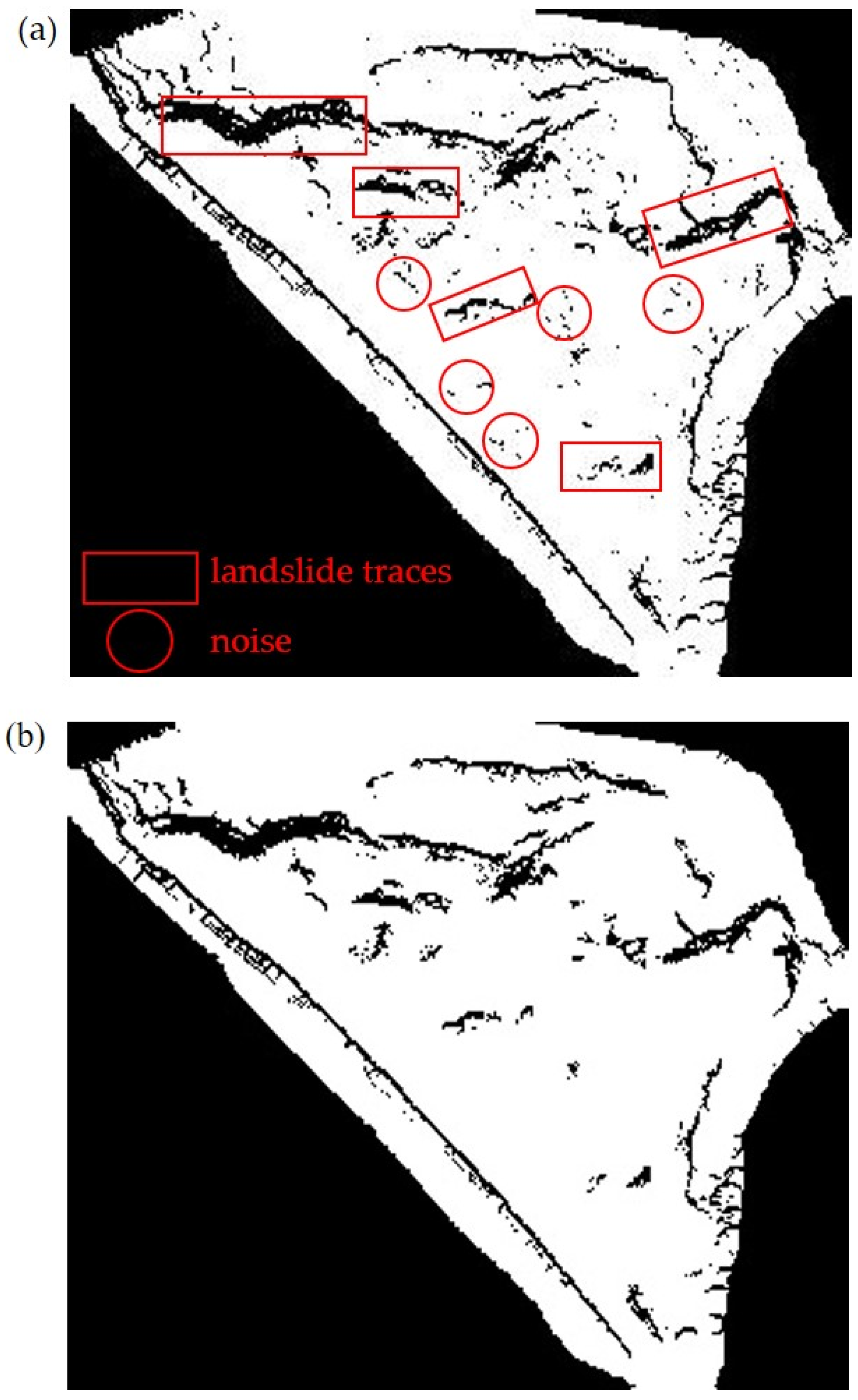
4.3.2. Landslide Traces Denoising Processing Results
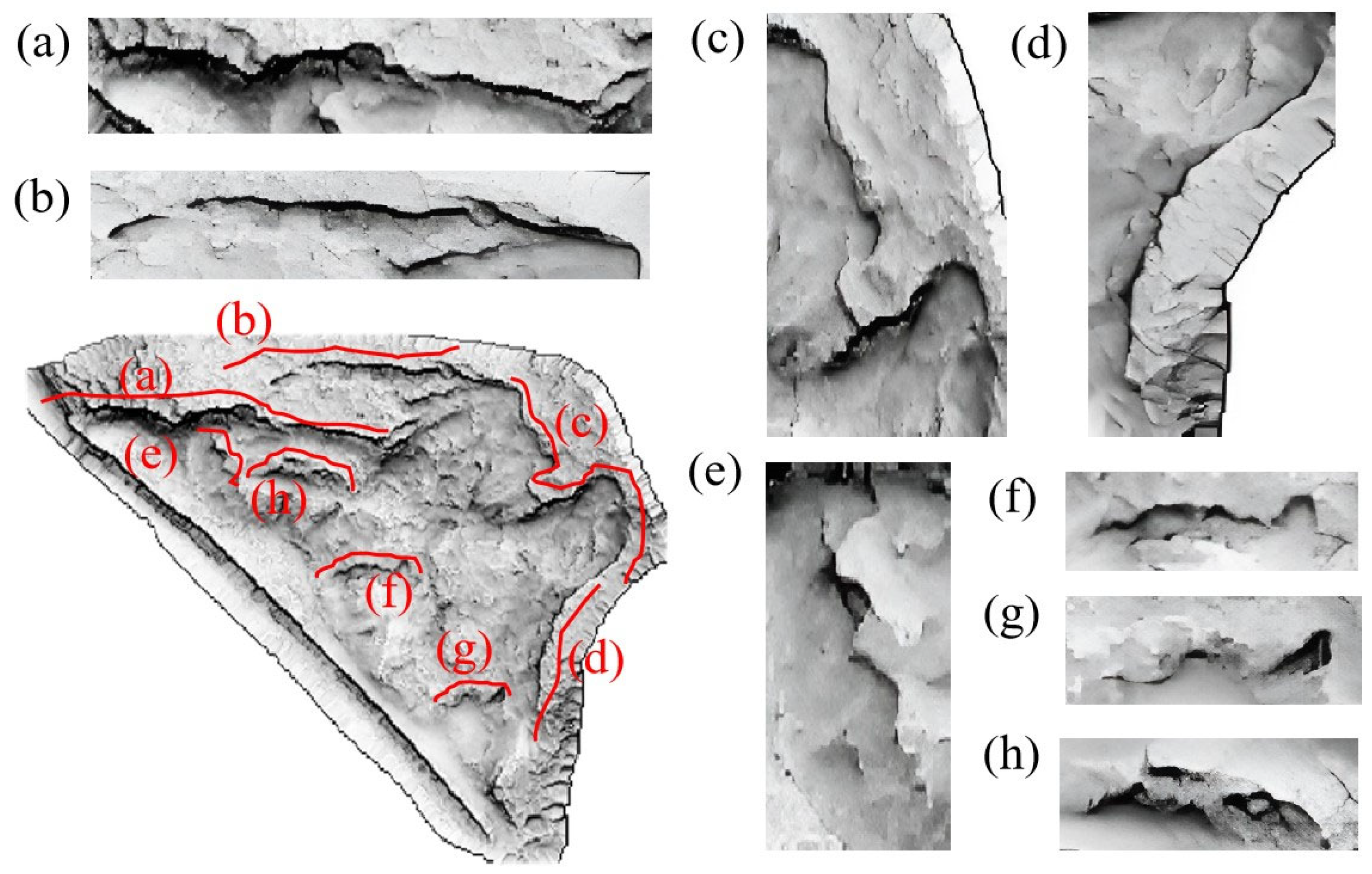
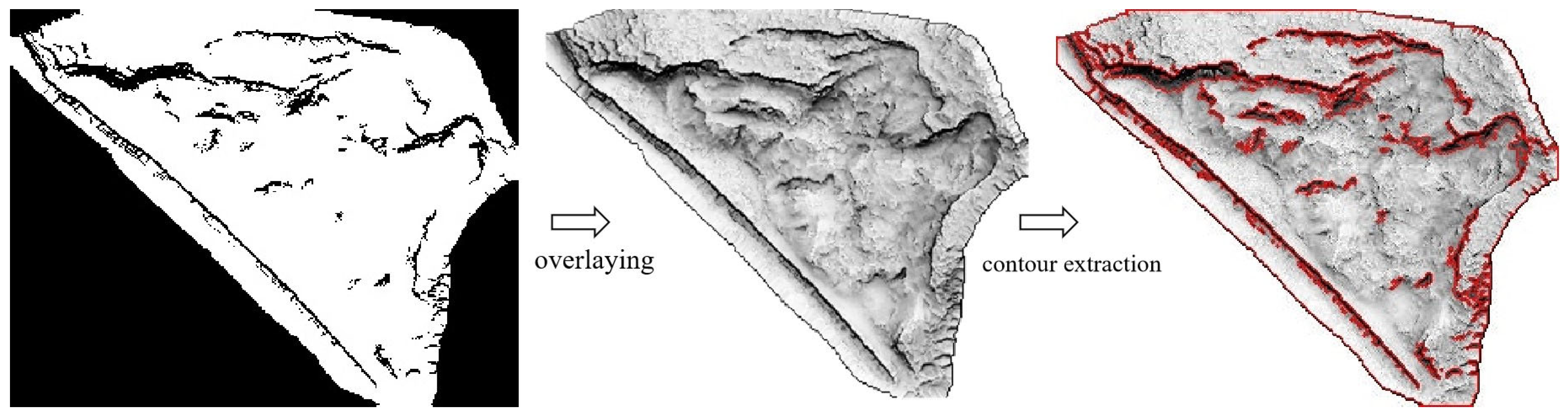
4.3.3. Results of Landslide Traces Contour Extraction
5. Discussion
6. Conclusions
- UAV-based LiDAR point cloud data can be utilized to generate high-precision DEM and generate multi-feature images based on DEM. This study produced sky-view factor, slope, openness, and hillshading images, which were effectively enhanced through image fusion using the Visualization for Archaeological Topography (VAT) method, thereby improving the recognition of landslide traces.
- Landslides result from complex geological activities and exhibit fractal characteristics in their occurrence and development. Utilizing the C-A fractal approach enables the effective extraction of landslide traces, overcoming the limitations of traditional statistical methods that manually select threshold values for the recognition of landslide traces.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Okyay, U.; Telling, J.; Glennie, C.L.; Dietrich, W.E. Airborne lidar change detection: An overview of Earth sciences applications. Earth-Sci. Rev. 2019, 198, 102929. [Google Scholar] [CrossRef]
- Azmoon, B.; Biniyaz, A.; Liu, Z. Use of High-Resolution Multi-Temporal DEM Data for Landslide Detection. Geosciences 2022, 12, 378. [Google Scholar] [CrossRef]
- Cai, J.; Zhang, L.; Dong, J.; Dong, X.; Li, M.; Xu, Q.; Liao, M. Detection and characterization of slow-moving landslides in the 2017 Jiuzhaigou earthquake area by combining satellite SAR observations and airborne Lidar DSM. Eng. Geol. 2022, 305, 106730. [Google Scholar] [CrossRef]
- Fang, K.; Tang, H.; Li, C.; Su, X.; An, P.; Sun, S. Centrifuge modelling of landslides and landslide hazard mitigation: A review. Geosci. Front. 2022, 14, 101493. [Google Scholar] [CrossRef]
- Van Tien, P.; Luong, L.; Duc, D.M.; Trinh, P.T.; Quynh, D.T.; Lan, N.C.; Thuy, D.T.; Phi, N.Q.; Cuong, T.Q.; Dang, K.; et al. Rainfall-induced catastrophic landslide in Quang Tri Province: The deadliest single landslide event in Vietnam in 2020. Landslides 2021, 18, 2323–2327. [Google Scholar] [CrossRef]
- Xu, Q.; Zhao, B.; Dai, K.; Dong, X.; Li, W.; Zhu, X.; Yang, Y.; Xiao, X.; Wang, X.; Huang, J.; et al. Remote sensing for landslide investigations: A progress report from China. Eng. Geol. 2023, 321, 107156. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, Y.; Tang, H.; Kang, J.; Wang, L.; Li, C.; Wang, D.; Liu, Z. Experimental study of the influence of wetting and drying cycles on the strength of intact rock samples from a red stratum in the Three Gorges Reservoir area. Eng. Geol. 2023, 314, 107013. [Google Scholar] [CrossRef]
- Frangen, T.; Pavić, M.; Gulam, V.; Kurečić, T. Use of a LiDAR-derived landslide inventory map in assessing Influencing factors for landslide susceptibility of geological units in the Petrinja area (Croatia). Geol. Croat. 2022, 75, 35–49. [Google Scholar] [CrossRef]
- Wang, H.B.; Liu, G.J.; Xu, W.Y.; Wang, G.H. GIS-based landslide hazard assessment: An overview. Prog. Phys. Geogr. 2005, 29, 548–567. [Google Scholar]
- Van Den Eeckhaut, M.; Poesen, J.; Verstraeten, G.; Vanacker, V.; Moeyersons, J.; Nyssen, J.; Van Beek, L.P.H. The effectiveness of hillshade maps and expert knowledge in mapping old deep-seated landslides. Geomorphology 2005, 67, 351–363. [Google Scholar] [CrossRef]
- Lee, C.F.; Huang, W.K.; Huang, C.M.; Chi, C.C.; Mikos, M.; Tiwari, B.; Yin, Y.; Sassa, K. Deep-Seated Landslide Mapping and Geomorphic Characteristic Using High Resolution DTM in Northern Taiwan. In Advancing Culture of Living with Landslides; Springer: Berlin/Heidelberg, Germany, 2017; pp. 767–777. [Google Scholar]
- Lo, C.M.; Lee, C.F.; Keck, J. Application of sky view factor technique to the interpretation and reactivation assessment of landslide activity. Environ. Earth Sci. 2017, 76, 375. [Google Scholar] [CrossRef]
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-view factor as a relief visualization technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef]
- Chen, G.; Li, X.; Chen, W.; Cheng, X.; Zhang, Y.; Liu, S. Extraction and application analysis of landslide influential factors based on LiDAR DEM: A case study in the Three Gorges area, China. Nat. Hazards 2014, 74, 509–526. [Google Scholar] [CrossRef]
- Chu, H.J.; Chen, Y.C.; Ali, M.Z.; Hofle, B. Multi-Parameter Relief Map from High-Resolution DEMs: A Case Study of Mudstone Badland. Int. J. Environ. Res. Public Health 2019, 16, 1109. [Google Scholar] [CrossRef] [PubMed]
- Chiba, T.; Kaneta, S.; Suzuki, Y. Red relief image map: New visualization method for three dimensional data. ISPRS Arch. 2008, 37, 1071–1076. [Google Scholar]
- Kaneda, H.; Chiba, T. Stereopaired Morphometric Protection Index Red Relief Image Maps (Stereo MPI-RRIMs): Effective Visualization of High-Resolution Digital Elevation Models for Interpreting and Mapping Small Tectonic Geomorphic Features. Bull. Seismol. Soc. Am. 2019, 109, 99–109. [Google Scholar] [CrossRef]
- Codru, I.; Niacsu, L.; Enea, A.; Bou-imajjane, L. Gully Head-Cuts Inventory and Semi-Automatic Gully Extraction Using LiDAR and Topographic Openness-Case Study: Covurlui Plateau, Eastern Romania. Land 2023, 12, 1199. [Google Scholar] [CrossRef]
- Fang, C.; Fan, X.; Zhong, H.; Lombardo, L.; Tanyas, H.; Wang, X. A Novel Historical Landslide Detection Approach Based on LiDAR and Lightweight Attention U-Net. Remote Sens. 2022, 14, 4357. [Google Scholar] [CrossRef]
- Yordanov, V.; Truong, Q.; Brovelli, M. Estimating Landslide Surface Displacement by Combining Low-Cost UAV Setup, Topographic Visualization and Computer Vision Techniques. Drones 2023, 7, 85. [Google Scholar] [CrossRef]
- Dai, K.; Li, Z.; Xu, Q.; Tomas, R.; Li, T.; Jiang, L.; Zhang, J.; Yin, T.; Wang, H. Identification and evaluation of the high mountain upper slope potential landslide based on multi-source remote sensing: The Aniangzhai landslide case study. Landslides 2023, 20, 1405–1417. [Google Scholar] [CrossRef]
- Liu, L.; Li, S.; Li, X.; Jiang, Y.; Wei, W.; Wang, Z.; Bai, Y. An integrated approach for landslide susceptibility mapping by considering spatial correlation and fractal distribution of clustered landslide data. Landslides 2019, 16, 715–728. [Google Scholar] [CrossRef]
- Yi, S.; Li, R.; Pu, X.; Fu, S. The fractal characteristics of fractures structure and activities distribution of the Zameila Mountain landslide in Tibet, China. In Engineering Geology. A Global View from the Pacific Rim, Proceedings of the 8th International Congress of the IAEG, Vancouver, BC, Canada, 21–25 September 1998; CRC Press: Rotterdam, The Netherlands, 2000; Volume 6, pp. 4245–4248. [Google Scholar]
- Yi, S.M.; Sun, Y.Z. Fractal characterization of regional landslide activities and its significance. In Proceedings of the International Symposium on Engineering Geology and the Environment, Athens, Greece, 23 June 1997; Volume 1, pp. 1155–1158. [Google Scholar]
- Sincic, M.; Bernat Gazibara, S.; Krkac, M.; Lukacic, H.; Arbanas, S.M. The use of high-resolution remote sensing data in preparation of input data for large-scale landslide hazard assessments. Land 2022, 11, 1360. [Google Scholar] [CrossRef]
- Wang, Z.; Tang, W.; Ma, Z.; Li, Y.; Yang, B.; Li, W.; Li, Y. Early identification of ridge-top landslide hazards in Jiuzhaigou area using InSAR-LiDAR method. Bull. Surv. Map. 2023, 5, 9–15. [Google Scholar]
- Fang, K.; Zhang, J.; Tang, H.; Hu, X.; Yuan, H.; Wang, X.; An, P.; Ding, B. A quick and low-cost smartphone photogrammetry method for obtaining 3D particle size and shape. Eng. Geol. 2023, 322, 107170. [Google Scholar] [CrossRef]
- Balta, H.; Velagic, J.; Bosschaerts, W.; De Cubber, G.; Siciliano, B. Fast statistical outlier removal based method for large 3D point clouds of outdoor environments. IFAC-PapersOnLine 2018, 51, 348–353. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Verbovsek, T.; Popit, T.; Kokalj, Z. VAT Method for Visualization of Mass Movement Features: An Alternative to Hillshaded DEM. Remote Sens. 2019, 11, 2946. [Google Scholar] [CrossRef]
- Mandelbrot, B. How long is the coast of Britain? Statistical self-similarity and fractional dimension. Science 1967, 156, 636–638. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Q.; Agterberg, F.; Ballantyne, S. The separation of geochemical anomalies from background by fractal methods. J. Geochem. Explor. 1994, 51, 109–130. [Google Scholar] [CrossRef]
- Comaniciu, D.; Meer, P. Mean shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- Kokalj, Ž.; Somrak, M. Why not a single image? Combining visualizations to facilitate fieldwork and on-screen mapping. Remote Sens. 2019, 11, 747. [Google Scholar] [CrossRef]
- Tarolli, P.; Sofia, G.; Dalla Fontana, G. Geomorphic features extraction from high-resolution topography: Landslide crowns and bank erosion. Nat. Hazards 2012, 61, 65–83. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Flight Parameters |
|---|---|
| Relative Altitude H (m) | 110 |
| Number of Laser Returns (count) | 3 |
| Pulse Repetition Frequency (kpts/s) | 240 |
| Flight Speed (m/s) | 8 |
| Range Accuracy (cm) | ±2 |
| Lateral Overlap (%) | 85 |
| Longitudinal Overlap (%) | 75 |
| Scanning Mode | Repeat Scanning |
| DEM Multi-Feature Images | Settings | Histogram Stretch Type Min–Max | Blending Order, Type, and Opacity |
|---|---|---|---|
| sky-view factor | radius of 5 m, 16 directions | linear, 0.65–1.00 | Three multiples, 25% |
| positive openness | radius of 5 m, 16 directions | linear, 68°–92° | Two overlays, 50% |
| slope | linear, 0°–55° | One luminosity, 50% | |
| hillshading | angle of 35°, azimuth of 315° | linear, 0.00–1.00 | Zero base layer |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Duan, P.; Liu, J.; Li, J. Research on Landslide Trace Recognition by Fusing UAV-Based LiDAR DEM Multi-Feature Information. Remote Sens. 2023, 15, 4755. https://doi.org/10.3390/rs15194755
Han L, Duan P, Liu J, Li J. Research on Landslide Trace Recognition by Fusing UAV-Based LiDAR DEM Multi-Feature Information. Remote Sensing. 2023; 15(19):4755. https://doi.org/10.3390/rs15194755
Chicago/Turabian StyleHan, Lei, Ping Duan, Jiajia Liu, and Jia Li. 2023. "Research on Landslide Trace Recognition by Fusing UAV-Based LiDAR DEM Multi-Feature Information" Remote Sensing 15, no. 19: 4755. https://doi.org/10.3390/rs15194755
APA StyleHan, L., Duan, P., Liu, J., & Li, J. (2023). Research on Landslide Trace Recognition by Fusing UAV-Based LiDAR DEM Multi-Feature Information. Remote Sensing, 15(19), 4755. https://doi.org/10.3390/rs15194755