


APO-ELM Model for Improving Azimuth Correction of Shipborne HFSWR

Abstract
:
1. Introduction
2. Sea Clutter Spectrum Model and Simulation
2.1. Received Signal Model
2.2. Simulation and Analysis of the Model
- Set the radar system parameters and shipborne platform-related parameters to solve for the distance resolution.
- Generate the time domain sequence of a certain azimuth following Equation (4).
- Using Equation (9), multiply the array steering vector and antenna error vector to obtain the clutter time domain sequence.
- Add distance information to the clutter time domain sequence and multiply the distance attenuation function at different distance units.
- Add the target information. Set the parameters of target distance, velocity, and azimuth, and add the target information to the corresponding distance units.
- Repeat steps 2 to 4 to obtain the time domain data of sea clutter in a certain angle range.
- Perform a Fast Fourier Transform (FFT) on the time domain data to obtain the sea clutter in the frequency domain.
3. Analysis of Factors in Sea Clutter
3.1. Wind Speed Effect
3.2. Wind Direction Effect
3.3. Sea Current Effect
3.4. Platform Forward Motion Effect
4. Azimuth Correction Method Based on the APO-ELM Network
4.1. Parameter Optimization
- (1)
- Sort output weights in descending order:
- (2)
- Obtain the ratio of the weight coefficients of neurons:
- (3)
- Set threshold and crop neurons:
4.2. Error Feedback
4.3. Iterative Prediction
- (1)
- Distribution weights initialization. Initialize the ELM network and dynamic weighted particle swarm optimization (DWPSO)-related parameters, select the training set containing th samples from the sample set (arbitrarily numbered as ), and initialize the training set distribution weights .
- (2)
- Random sampling. In the selected training set, the order is adjusted to form a new training set , which is added to the network for training.
- (3)
- Loss function acquisition. When training the -th weak learner , the EDPO-ELM network is used to train the training sample set to obtain the prediction result , which gives the maximum error:
- (4)
- Required weights are obtained from the weak learner during the iterative process. The weak learner weight coefficient is obtained based on the weighted average loss as follows:where is a constant that prevents the denominator from being zero. It shows that when is high, weak learner weight is low.
- (5)
- Update weights. The weights of each sample for the next training round are updated according to weight .
- (6)
- Strong learner function is obtained. After iterations, the prediction value of the -group weak learner function is obtained, and the corresponding weight is assigned to each weak learner. Then, the strong prediction function is obtained by weighting.
4.4. Overall Model
- Sample acquisition. Generate the sea clutter signal following the clutter simulation process. The measured data are placed into the echo signal for DBF processing to obtain the uncorrected target azimuth and the azimuth error. Different clutter characteristics are set to obtain different azimuth errors to produce sample sets. If Q samples are obtained, the sample set is constructed as , where is the eigenvector of the first sample and is the azimuth error of the -th sample due to sea clutter.
- Feature extraction. Input features: wind direction, wind speed, current speed, platform forward motion, and SCR. Output features: the azimuth error between the true target angle and the target estimated angle value is used as the network output.
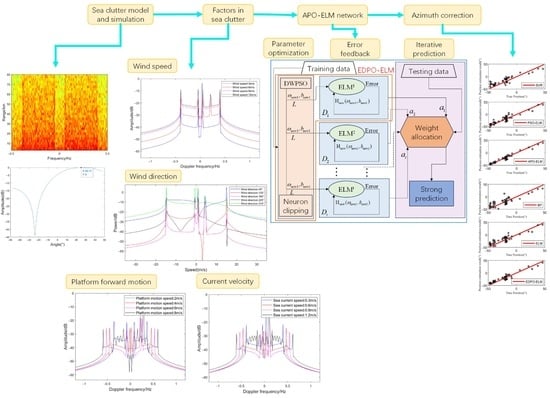
- Model optimization. The network structure is determined via analysis and comparison. The number of input nodes is four, the number of output nodes is one, and the sigmoid function is used as the activation function: . The DWPSO algorithm is used to find the optimal input layer weights and hidden layer thresholds, and the network is trained for the first time. Based on the output weights obtained from training, a threshold is set, and the number of hidden layer nodes is determined adaptively using the neuron cropping algorithm to obtain the DPO-ELM network model. Then, the obtained DPO-ELM network is trained, and the hidden layer matrix is updated based on the output layer errors backward to update each network parameter, which is fed back to obtain the EDPO-ELM network model. Afterward, multiple weak learners are obtained after iterative training by the AdaBoost algorithm, and a strong prediction is obtained. At this point, the final APO-ELM network model is obtained. The overall network framework structure is shown in Figure 15.
- Performance evaluation. After the APO-ELM network is trained, the target DF error of the test set is estimated, and the vessel target azimuth can be accurately obtained via error compensation. Two performance metrics, the root mean square error (RMSE) and R-squared (), are used for evaluation, defined aswhere is the number of samples, is the predicted value, and is the true value. By comparing the corrected directional results, we can determine whether they are closer to the true value of the target.
5. Experiment Results and Discussion
5.1. Data Processing
5.2. Parameter Setting
5.3. Experiment Results
5.4. Comparison Experiment
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cai, W.; Xie, J.; Sun, M. Space-Time Distribution of the First-Order Sea Clutter in High Frequency Surface Wave Radar on a Moving Shipborne Platform. In Proceedings of the 2015 Fifth International Conference on Instrumentation and Measurement, Computer, Communication and Control (IMCCC), Qinhuangdao, China, 18–20 September 2015; pp. 1408–1412. [Google Scholar]
- Zhang, L.; You, W.; Wu, Q.; Qi, S.; Ji, Y. Deep learning-based automatic clutter/interference detection for HFSWR. Remote Sens. 2018, 10, 1517. [Google Scholar] [CrossRef] [Green Version]
- Ji, Y.; Zhang, J.; Wang, Y.; Chang, G.; Sun, W. Performance analysis of target detection with compact HFSWR. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar]
- Ali, M.M. Estimation of ocean subsurface thermal structure from surface parameters: A neural network approach. Geophys. Res. Lett. 2004, 31, 20–308. [Google Scholar] [CrossRef] [Green Version]
- Atanga, J.N.; Wyatt, L.R. Comparison of inversion algorithms for HF radar wave measurements. IEEE J. Ocean. Eng. 1997, 22, 593–603. [Google Scholar] [CrossRef]
- Liu, J.; Ji, Y.; Liu, Y.; Meng, J.; Wang, Y.; Zhang, H. Simulation analysis of first order sea clutter spectrum for shipborne bistatic HFSWR. In Proceedings of the IET International Radar Conference (IET IRC 2020), Online, 4–6 November 2020; pp. 1656–1660. [Google Scholar] [CrossRef]
- Chen, Y.; Ji, H.; Xie, W. Study on fractal model for radar clutter. In Proceedings of the Proceedings of the 3rd World Congress on Intelligent Control and Automation (Cat. No.00EX393), Hefei, China, 26 June–2 July 2000; Volume 3, pp. 2145–2148. [Google Scholar]
- Zhu, Y.; Shang, C.; Li, Y. A FBLP based method for suppressing sea clutter in HFSWR. In Proceedings of the 2013 International Symposium on Antennas & Propagation, Nanjing, China, 23–25 October 2013; pp. 1090–1093. [Google Scholar]
- Walsh, J.; Huang, W.; Gill, E. The first-order high frequency radar ocean surface cross section for an antenna on a floating platform. IEEE Trans. Antennas Propag. 2010, 58, 2994–3003. [Google Scholar] [CrossRef]
- Walsh, J.; Huang, W.; Gill, E. The second-order high frequency radar ocean surface cross section for an antenna on a floating platform. IEEE Trans. Antennas Propag. 2013, 60, 4804–4813. [Google Scholar] [CrossRef]
- Sun, M.; Xie, J.; Ji, Z.; Yao, G. Ocean surface cross sections for shipborne HFSWR with sway motion. Radio Sci. November 2016, 51, 1745–1757. [Google Scholar] [CrossRef] [Green Version]
- Gao, B.; Jia, M.; Zhang, T.; Zhang, Q. Reliable Target Positioning in Complicated Environments Using Multiple Radar Observations. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar]
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Wu, X.; Cheng, F.; Yang, Z.; Ke, H. Broad Beam HFSWR Array Calibration Using Sea Echoes. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006; pp. 1–3. [Google Scholar] [CrossRef]
- Sun, M.; Xie, J.; Hao, Z.; Yi, C. Target detection and estimation for shipborne HFSWR based on oblique projection. In Proceedings of the 2012 IEEE 11th International Conference on Signal Processing, Beijing, China, 21–25 October 2012; pp. 386–389. [Google Scholar]
- Yang, K.; Zhang, L.; Niu, J.; Ji, Y.; Wu, Q.M.J. Analysis and Estimation of Shipborne HFSWR Target Parameters Under the Influence of Platform Motion. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4703–4716. [Google Scholar] [CrossRef]
- Chen, X.; Su, N.; Huang, Y.; Guan, J. False-Alarm-Controllable Radar Detection for Marine Target Based on Multi Features Fusion via CNNs. IEEE Sens. J. 2021, 21, 9099–9111. [Google Scholar] [CrossRef]
- Blesssy, C.S.; Supriya, M.H.; Jayanthi, V.S. Deep Neural Based Beamforming Techniques for Direction of Arrival (DOA) Estimation. In Proceedings of the 2021 International Symposium on Ocean Technology (SYMPOL), Kochi, India, 9–11 December 2021; pp. 1–9. [Google Scholar]
- Ashok, C.; Venkateswaran, N. Support vector regression based DOA estimation in heavy tailed noise environment. In Proceedings of the 2016 International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 23–25 March 2016; pp. 99–102. [Google Scholar] [CrossRef]
- Yang, C.; Liu, F.; Luo, X. Error Correction of Sample Pair Analysis Based on Support Vector Regression. In Proceedings of the 2011 Third International Conference on Multimedia Information Networking and Security, Shanghai, China, 4–6 November 2011; pp. 633–636. [Google Scholar]
- Luo, S.; Yang, W.; Zhang, A. Performance of feedback BP networks. J. Syst. Eng. Electron. 1995, 6, 11–18. [Google Scholar]
- Chen, Z.; Pei, L. A PCA-BP fast estimation method for broadband two-dimensional DOA of high subsonic flight targets based on the acoustic vector sensor array. In Proceedings of the 2021 14th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 23–25 October 2021; pp. 1–6. [Google Scholar]
- Liu, Z.-M.; Zhang, C.; Yu, P.S. Direction-of-Arrival Estimation Based on Deep Neural Networks with Robustness to Array Imperfections. IEEE Trans. Antennas Propag. 2018, 66, 7315–7327. [Google Scholar] [CrossRef]
- Liu, X.; Tang, J. Mass Classification in Mammograms Using Selected Geometry and Texture Features, and a New SVM-Based Feature Selection Method. IEEE Syst. J. 2014, 8, 910–920. [Google Scholar] [CrossRef]
- Xu, X.; Mao, Y.; Xiong, J.; Zhou, F. Classification Performance Comparison between RVM and SVM. In Proceedings of the 2007 International Workshop on Anti-Counterfeiting, Security and Identification (ASID), Xizmen, China, 16–18 June 2007; pp. 208–211. [Google Scholar] [CrossRef]
- Mao, D.; Zhang, L.; Niu, J.; Ji, Y.; Zeng, L.; Li, X.; Yang, K. Long-term Adaptive Tracking for HFSWR Vessels Combined with ELM. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Zhang, L.; Shi, C.; Niu, J.; Ji, Y.; Wu, Q.M.J. DOA Estimation for HFSWR Target Based on PSO-ELM. IEEE Geosci. Remote Sens. Lett. 2022, 19, 3504205. [Google Scholar] [CrossRef]
- Freund, Y.; Schapire, R.E. A Decision-Theoretic Generalization of On-Line Learning and an Application to Boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef] [Green Version]
- Nevendra, M.; Singh, P. Software bug count prediction via AdaBoost.R-ET. In Proceedings of the 2019 IEEE 9th International Conference on Advanced Computing (IACC), Tiruchirappalli, India, 13–14 December 2019; pp. 7–12. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, J.-G.; Zhao, G.-Q.; Yao, Y.; Xu, C. Endpoint Temperature Prediction of Molten Steel in VD Furnace Based on AdaBoost.RT-ELM. In Proceedings of the 2020 IEEE 9th Data Driven Control and Learning Systems Conference (DDCLS), Liuzhou, China, 20–22 November 2020; pp. 789–794. [Google Scholar] [CrossRef]
- Pierson, W.; Moskowitz, L. A proposed spectral form for fully developed wind seas based upon the similarity theory of S.A. Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Turley, M. Waves in Ocean Engineering; Ellis Horwood: New York, NY, USA, 1991. [Google Scholar]
- Barrick, D.E. Theory of HF and VHF propagation across the rough sea, 2, Application to HF and VHF propagation above the sea. Radio Sci. 1971, 6, 527–533. [Google Scholar] [CrossRef]
- Huang, G.B.; Chen, L.; Siew, C.K. Universal approximation using incremental constructive feedforward networks with random hidden nodes. IEEE Trans. Neural Netw. 2006, 17, 879–892. [Google Scholar] [CrossRef] [PubMed] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Implications | Numerical Value | Unit |
|---|---|---|---|
| Angle range | [−48,48] | ° | |
| Angular resolution | 0.1 | ° | |
| Distance resolution | 2.5 | ||
| Speed of light | 300000,000 | ||
| Radar carrier frequency | 4.7 | ||
| Sweep bandwidth | 30 | ||
| Corresponding integration time | 130 | ||
| Element spacing horizonal coordinate | [0 15.5 32.5 49.5 64] | ||
| Element spacing vertical coordinate | [0 0 0 0 0] |
| Wind Scale | Wind Name | Wind Speed (m/s) |
|---|---|---|
| 0 | Windless | 0–0.2 |
| 1 | Soft wind | 0.3–1.5 |
| 2 | Light wind | 1.6–3.3 |
| 3 | Breeze | 3.4–5.4 |
| 4 | Zephyr | 5.5–7.9 |
| 5 | Strong wind | 8.0–10.7 |
| 6 | Sizzling wind | 10.8–13.8 |
| Target True Azimuth | Wind Speed (m/s) | Wind Direction (m/s) | Sea Current (m/s) | Platform Forward Motion (m/s) | SCR (dB) | Uncorrected | Corrected by PSO-ELM | Corrected by APO-ELM |
|---|---|---|---|---|---|---|---|---|
| 5 | 0.8 | 2 | 2 | |||||
| 10 | 0.3 | 2 | 3 | |||||
| 5 | 0.5 | 3 | 2 | |||||
| 3 | 1 | 8 | 5 | |||||
| 5 | 0.5 | 5 | 1 | |||||
| 8 | 1 | 2 | 5 | |||||
| 5 | 0.5 | 3 | 2 | |||||
| 3 | 0.5 | 3 | 1 | |||||
| 10 | 1 | 10 | 3 |
| Method | BP | SVR | ELM | PSO-ELM | EDPO-ELM | Proposed Method |
|---|---|---|---|---|---|---|
| RMSE | 11.5212 | 8.6249 | 9.9094 | 8.1386 | 6.6877 | 4.8336 |
| R2 | 0.7407 | 0.8084 | 0.8347 | 0.8734 | 0.9186 | 0.9525 |
| MT(s) | 0.123931 | 0.008857 | 0.004516 | 0.005906 | 0.003658 | 0.002162 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Yu, H.; Zhang, L.; Li, G. APO-ELM Model for Improving Azimuth Correction of Shipborne HFSWR. Remote Sens. 2023, 15, 3818. https://doi.org/10.3390/rs15153818
Wang Y, Yu H, Zhang L, Li G. APO-ELM Model for Improving Azimuth Correction of Shipborne HFSWR. Remote Sensing. 2023; 15(15):3818. https://doi.org/10.3390/rs15153818
Chicago/Turabian StyleWang, Yaning, Haibo Yu, Ling Zhang, and Gangsheng Li. 2023. "APO-ELM Model for Improving Azimuth Correction of Shipborne HFSWR" Remote Sensing 15, no. 15: 3818. https://doi.org/10.3390/rs15153818
APA StyleWang, Y., Yu, H., Zhang, L., & Li, G. (2023). APO-ELM Model for Improving Azimuth Correction of Shipborne HFSWR. Remote Sensing, 15(15), 3818. https://doi.org/10.3390/rs15153818