




Accuracy Improvement of High-Resolution Wide-Swath Spaceborne Synthetic Aperture Radar Imaging with Low Pule Repetition Frequency
Abstract
:1. Introduction
2. Parameter Design of the Low-PRF SAR System
2.1. Parameter Design Process
2.2. Design of PRF
2.3. Design of Azimuth Sweep Parameters
2.4. Parameter Design Results
3. Spaceborne HRWS SAR Imaging Algorithm
3.1. Signal Model
3.2. Sub-Aperture Division and Imaging
3.3. Coherent Synthesis of Sub-Aperture Images
| Algorithm 1 Algorithm of spectrum shift estimation |
|
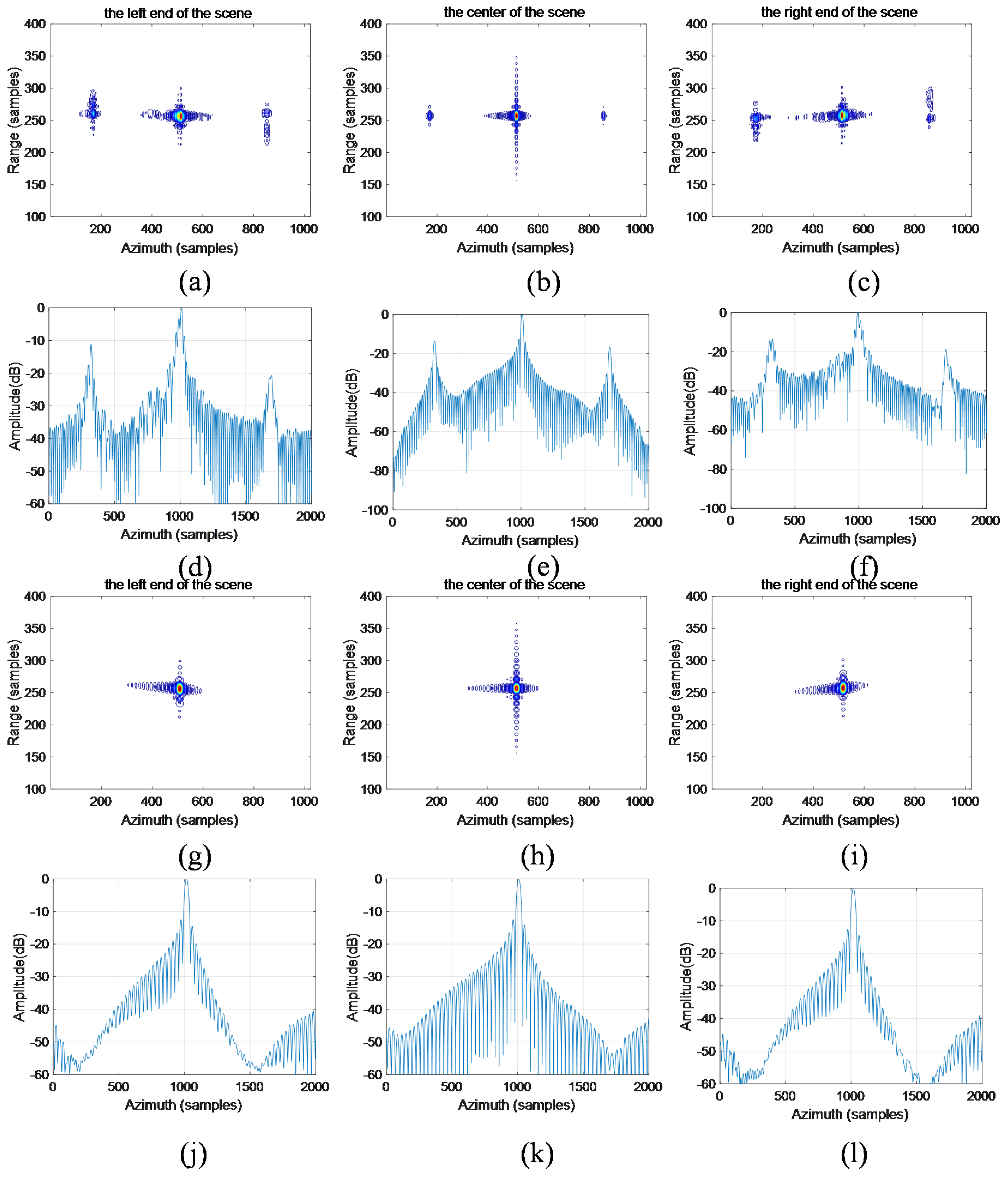
4. Simulated Data Processing Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Inggs, M. Synthetic Aperture Radar During the 50 Years of the Aerospace and Electronic Systems Society. IEEE Aerosp. Electron. Syst. Mag. 2023, 38, 22–31. [Google Scholar] [CrossRef]
- Lu, J.; Zhang, L.; Wei, S.; Li, Y. Resolution Enhancement for Forwarding Looking Multi-Channel SAR Imagery With Exploiting Space—Time Sparsity. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5200617. [Google Scholar] [CrossRef]
- Zakharov, I.; Henschel, M.D.; Power, D.; Burke, P.; Puestow, T.; Warren, S. Signatures of Small Boats With TerraSAR-X Staring Spotlight Data. IEEE Geosci. Remote Sens. Lett. 2023, 20, 4001005. [Google Scholar] [CrossRef]
- K.R., G.P.; Gande, A.K.; Ram, G. A Novel Very Low Power Leakage Factor Window for Image Processing Applications. IEEE Geosci. Remote Sens. Lett. 2023, 20, 4001505. [Google Scholar] [CrossRef]
- Luomei, Y.; Xu, F. Segmental Aperture Imaging Algorithm for Multirotor UAV-Borne MiniSAR. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5202318. [Google Scholar] [CrossRef]
- Han, S.; Addabbo, P.; Biondi, F.; Clemente, C.; Orlando, D.; Ricci, G. Innovative Solutions Based on the EM-Algorithm for Covariance Structure Detection and Classification in Polarimetric SAR Images. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 209–227. [Google Scholar] [CrossRef]
- Nie, G.; Liao, G.; Zeng, C.; Zhang, X.; Li, D. Joint Radio Frequency Interference and Deceptive Jamming Suppression Method for Single-Channel SAR via Subpulse Coding. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 787–798. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, X.; Xu, Y. An Efficient HRWS Sar Reconstruction Method Based on Frequency Domain Back Projection. In Proceedings of the IGARSS 2022-2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 767–770. [Google Scholar] [CrossRef]
- Zhang, Z.; Yu, W.; Zheng, M.; Zhou, Z.X. Doppler Centroid Estimation for Ground Moving Target in Multichannel HRWS SAR System. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4012105. [Google Scholar] [CrossRef]
- Zhang, S.X.; Li, S.; Liu, Y.; Xing, M.D.; Chen, J. A Novel Azimuth Doppler Signal Reconstruction Approach for the GEO-LEO Bi-Static Multi-Channel HRWS SAR System. IEEE Access 2019, 7, 39539–39546. [Google Scholar] [CrossRef]
- Ji, P.; Xing, S.; Dai, D.; Pang, B.; Feng, D. The Imaging Characteristics of Doppler-Modulation Jamming Against HRWS-SIMO-SAR. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4029005. [Google Scholar] [CrossRef]
- Jianlai CHEN, H.Y. Wide-beam SAR autofocus based on blind resampling. Sci. China Inf. Sci. 2023, 66, 140304. [Google Scholar]
- Bartusch, M.; Quiroz, A.E.N.; Stettner, S.; Moreira, A.; Zink, M. German X-Band Spaceborne SAR Heritage and the Future HRWS Mission. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 804–807. [Google Scholar] [CrossRef]
- Guo, X.; Gao, Y.; Liu, X. Moving target detection in HRWS mode. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 1169–1172. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Z.; Wang, Z.; Bao, Z. On the Baseband Doppler Centroid Estimation for Multichannel HRWS SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2050–2054. [Google Scholar] [CrossRef]
- Baumgartner, S.V.; Schaefer, C.; Krieger, G. Simultaneous Low PRF GMTI and HRWS SAR Imaging without Changing the System Operation Mode. In Proceedings of the EUSAR 2014; 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; pp. 1–4. [Google Scholar]
- Zhang, L.; Gao, Y.; Wang, K.; Liu, X. A blind reconstruction of azimuth signal for multichannel HRWS SAR system. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1020–1023. [Google Scholar] [CrossRef]
- Guo, X.; Gao, Y.; Wang, K.; Liu, X. Unambiguous SAR imaging algorithm via spotlight mode for multichannel SAR systems. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Xu, W.; Deng, Y. Multichannel SAR With Reflector Antenna for High-Resolution Wide-Swath Imaging. IEEE Antennas Wirel. Propag. Lett. 2010, 9, 1123–1126. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, C.; Liu, S.; Huang, Y. Design and Control of a Novel Wireless Energy Router With Independent Power Transmission Channels. IEEE Trans. Power Electron. 2023, 38, 2940–2955. [Google Scholar] [CrossRef]
- Lanari, R.; Tesauro, M.; Sansosti, E.; Fornaro, G. Spotlight SAR data focusing based on a two-step processing approach. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1993–2004. [Google Scholar] [CrossRef]
- Prats, P.; Scheiber, R.; Mittermayer, J.; Meta, A.; Moreira, A. Processing of Sliding Spotlight and TOPS SAR Data Using Baseband Azimuth Scaling. IEEE Trans. Geosci. Remote Sens. 2010, 48, 770–780. [Google Scholar] [CrossRef] [Green Version]
- Men, Z.R.; Wang, P.B.; Li, C.S.; Cui, Z.M.; Wen, X.Z.; Li, S. A refined geometric correction algorithm for spotlight and sliding spotlight spaceborne SAR. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 1302–1304. [Google Scholar] [CrossRef]
- Han, S.; Zhu, D.; Mao, X. A Novel Imaging Algorithm for Spotlight SAR Based on Scaling Transform. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4508905. [Google Scholar] [CrossRef]
- Ge, B.; Chen, L.; An, D.; Zhou, Z. GPU-based FFBP algorithm for high-resolution spotlight SAR imaging. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xiamen, China, 22–25 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Zanin, K.A.; Moskatinev, I.V. Improvement of Methods for Evaluating the Resolving Power of a Space Synthetic Aperture Radar. Sol. Syst. Res. 2018, 52, 666–672. [Google Scholar] [CrossRef]
- Chien, W.; Dilworth, D.; Liu, E.; Leith, E. Synthetic-aperture chirp confocal imaging. Appl. Opt. 2006, 45, 501–510. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, J.; Jin, Y.; Yu, H.; Liang, B.; Yang, D.G. Real-Time Processing of Spaceborne SAR Data With Nonlinear Trajectory Based on Variable PRF. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5205212. [Google Scholar] [CrossRef]
- Zanin, K.A. Quality analysis of image geolocation for a space synthetic aperture radar. Sol. Syst. Res. 2014, 48, 555–560. [Google Scholar] [CrossRef]
- Doody, S.G.; Hughes, N.; Ramio-Tomas, L.; Mak, E.; Muff, D.G.; Nottingham, M.R. Low-frequency synthetic aperture radar data-dome collection with the Bright Sapphire II instrument. Electron. Lett. 2017, 53, 981–983. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Indicators | Values | Established Parameters | Values | Designed Parameters | Values |
|---|---|---|---|---|---|
| 20 km | H | 400 km | 982 km | ||
| 12 km | 35 GHz | 979 m/s | |||
| 0.3 m | 0.2 s | 3000 Hz | |||
| 0.3 m | 4.5 m | 1.1 GHz | |||
| 11s |
| Targets | Scenario | PGLR (dB) | IRW (m) |
|---|---|---|---|
| A | Before suppression | −11.05 | 0.30 |
| After suppression | −52.95 | 0.42 | |
| B | Before suppression | −13.68 | 0.31 |
| After suppression | −43.57 | 0.44 | |
| C | Before suppression | −13.85 | 0.30 |
| After suppression | −52.04 | 0.42 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Ruan, Y.; Zhang, X. Accuracy Improvement of High-Resolution Wide-Swath Spaceborne Synthetic Aperture Radar Imaging with Low Pule Repetition Frequency. Remote Sens. 2023, 15, 3811. https://doi.org/10.3390/rs15153811
Wang X, Ruan Y, Zhang X. Accuracy Improvement of High-Resolution Wide-Swath Spaceborne Synthetic Aperture Radar Imaging with Low Pule Repetition Frequency. Remote Sensing. 2023; 15(15):3811. https://doi.org/10.3390/rs15153811
Chicago/Turabian StyleWang, Xiaofeng, Yaduan Ruan, and Xinggan Zhang. 2023. "Accuracy Improvement of High-Resolution Wide-Swath Spaceborne Synthetic Aperture Radar Imaging with Low Pule Repetition Frequency" Remote Sensing 15, no. 15: 3811. https://doi.org/10.3390/rs15153811
APA StyleWang, X., Ruan, Y., & Zhang, X. (2023). Accuracy Improvement of High-Resolution Wide-Swath Spaceborne Synthetic Aperture Radar Imaging with Low Pule Repetition Frequency. Remote Sensing, 15(15), 3811. https://doi.org/10.3390/rs15153811