

The Radar Signal Processor of the First Romanian Space Surveillance Radar



Abstract
:
1. Introduction
State of the Art
2. Materials and Methods
2.1. Radar System Description and Purpose of Radar Signal Processor (SP)
2.2. The Hardware of the Signal Processor (SP)
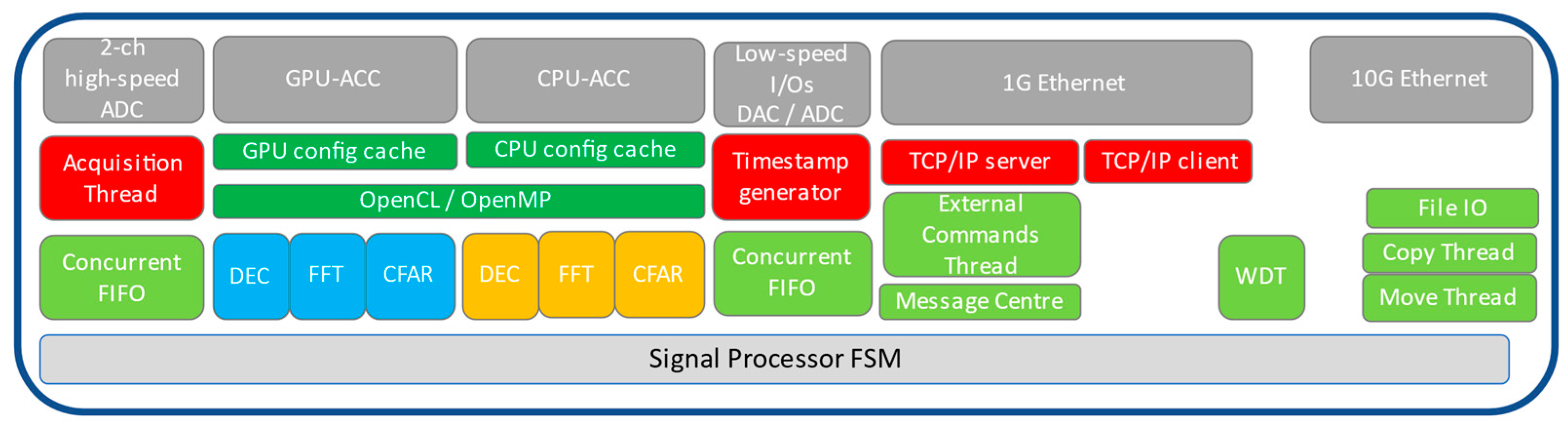
2.3. The Software of the Signal Processor (SP)
2.4. The Performance Requirements for the Signal Processor
- It allows to keep a constant, relatively small RF bandwidth (2 MHz) which allows the receiver chain to keep noise under control (the noise is a product of bandwidth with spectral density). Constant bandwidth allows simpler receiver design, and one would prefer to modify the parameters of the receiving pipeline, in software (digital domain) in the SP, as opposed to temper with the analog part in the receiver. The complex receiver means complex tuning across different frequencies (we use frequency modulation).
- The power scattered by the target (the echo signal) decreases with a power of 4 of distance, so the further away the target is, the much worse would be for the SNR. This requires a much better noise cancellation algorithm, which requires a larger FFT, which requires a longer signal in time (continuous emission over larger distances requires a longer time-duration of the signal due to longer round-trip time).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scale Number | Description (Range) | Range (km) | Trigger Period (ms) | Acquired Wave Size (Samples) | Maximum Processing Time (ms) |
|---|---|---|---|---|---|
| 1 | Close | <400 | 40 | 256 k | 40 |
| 2 | Mid-close | <900 | 100 | 512 k | 100 |
| 3 | Mid-far | <1800 | 250 | 1 M | 186 |
| 4 | Far | <3900 | 500 | 2 M | 290 |
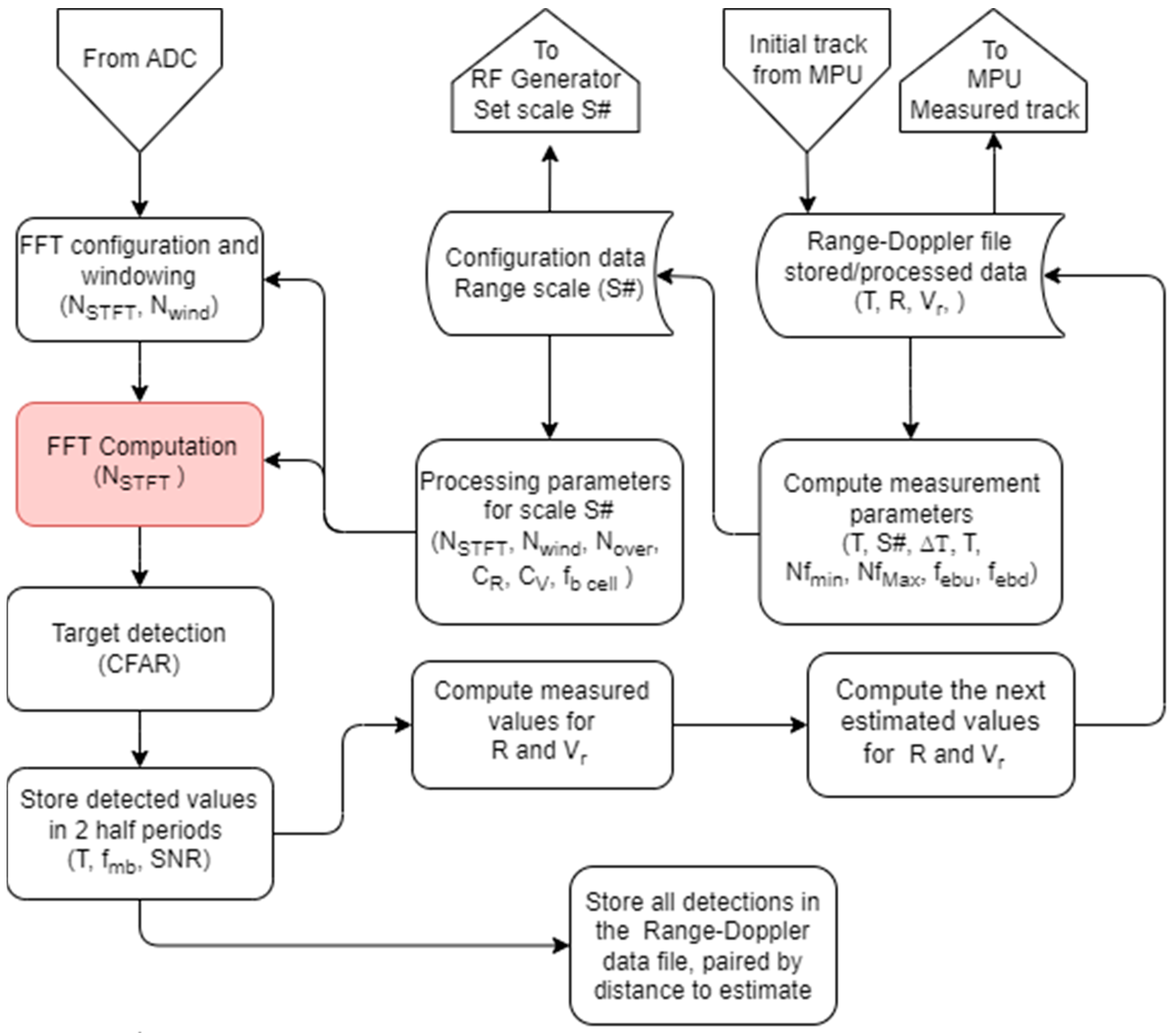
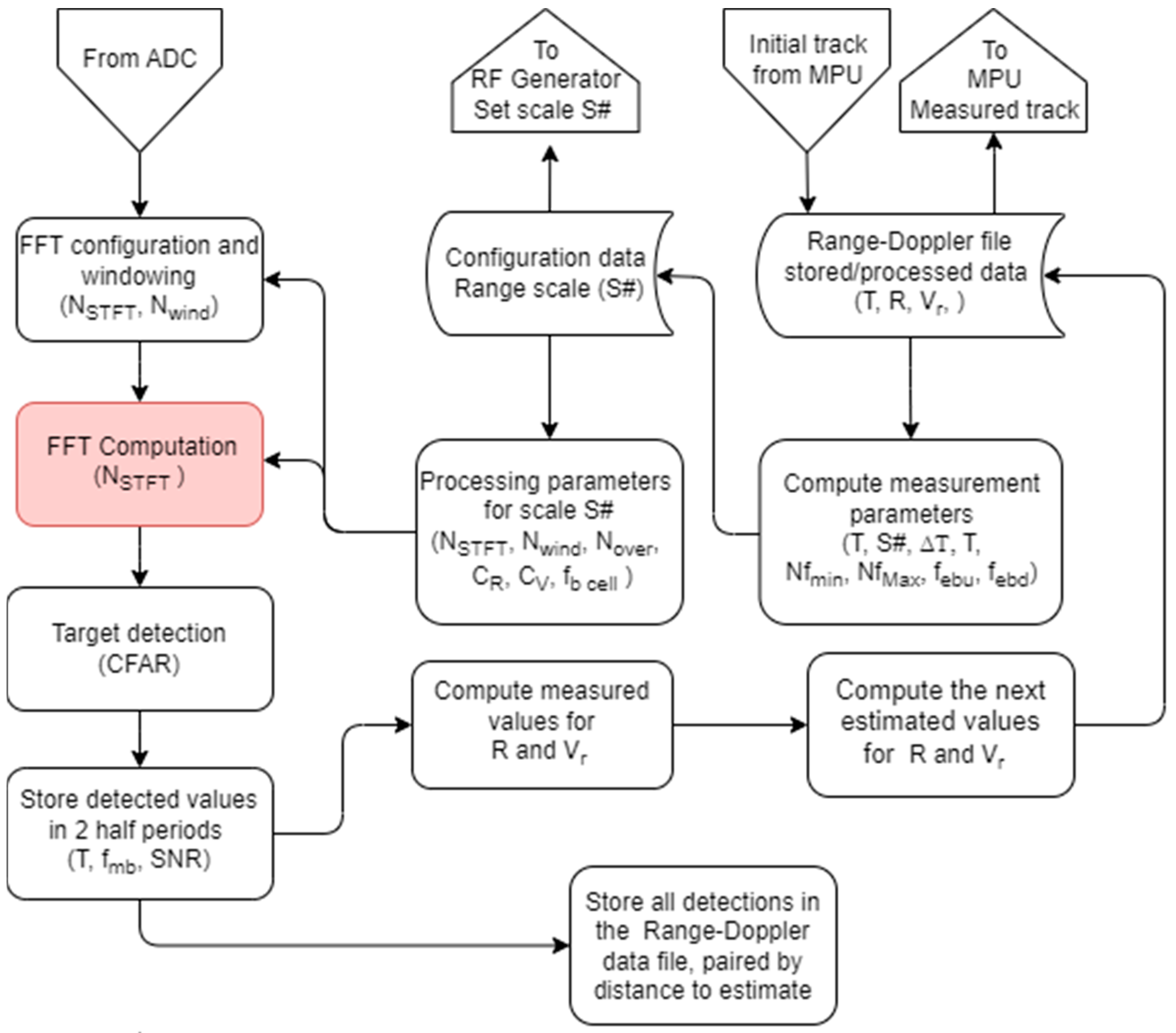
2.5. The FSM of the Main Signal Processor
2.6. The Modifiable Parameters of the Signal Processor
2.7. Other Considerations Regarding the System Reliability and Performance
- Creating and using a simulator to play back the data without the need for a real space target;
- Using references instead of memory pointers;
- Using the software Watchdog Timer;
- Intercepting all OS signals sent to the application, to graciously close used resources in case of system errors/crashes;
- Auto-restart the app with the last auto-saved settings and commands received from the M&C system;
- All data processing operations were tested against Octave implementation to check for precision loss;
- All computation was performed in double precision (fp64).
2.8. Software Inside the Signal Processor
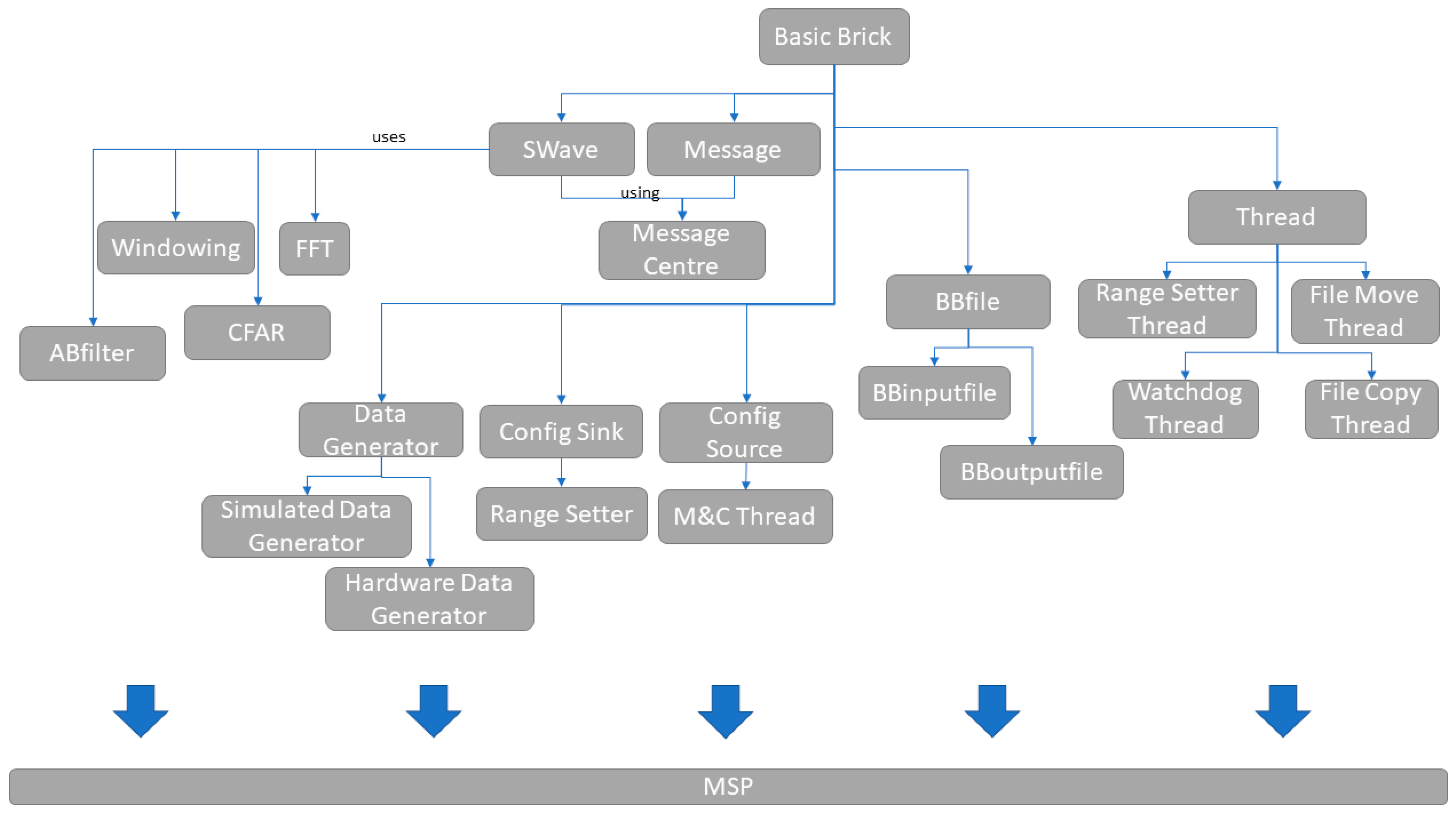
2.8.1. Software Class Diagram
- Components that assure communication with the outside systems (range setter, M&C thread, Message Center, Message);
- Components that assure communication between SP’s components (SWave, ConcurrentQueue);
- Components that assure data processing (CFAR, ABfilter, FFT, Windowing);
- Components that assure data acquisition (Data Generator, Config Sink);
- Components that enable data output (File Move Thread, File Copy Thread, BB*file);
- Components that enable testing;
- Components that assure reliable behavior in case of errors (WatchDog Thread, CPUusage Thread);
- Top-level component of MSP (Main Signal Processor which uses all the other components).
2.8.2. Digital Processing Operations
- DEC (decimation using a custom factor 5);
- FFT (1D complex-to-complex conversion of time-domain to frequency-domain data);
- ABS (absolute value of complex numbers);
- CFAR (applying a constant false alarm rate detection algorithm);
- ABF (alpha-beta filter, for predictive range and radial speed).
DEC (Decimation)
- Decimation by sampling: output sample is one of the F consecutive samples;
- Decimation by averaging: output sample is the average of F consecutive samples.
FFT (Fast Fourier Transform)
ABS (Absolute Value)
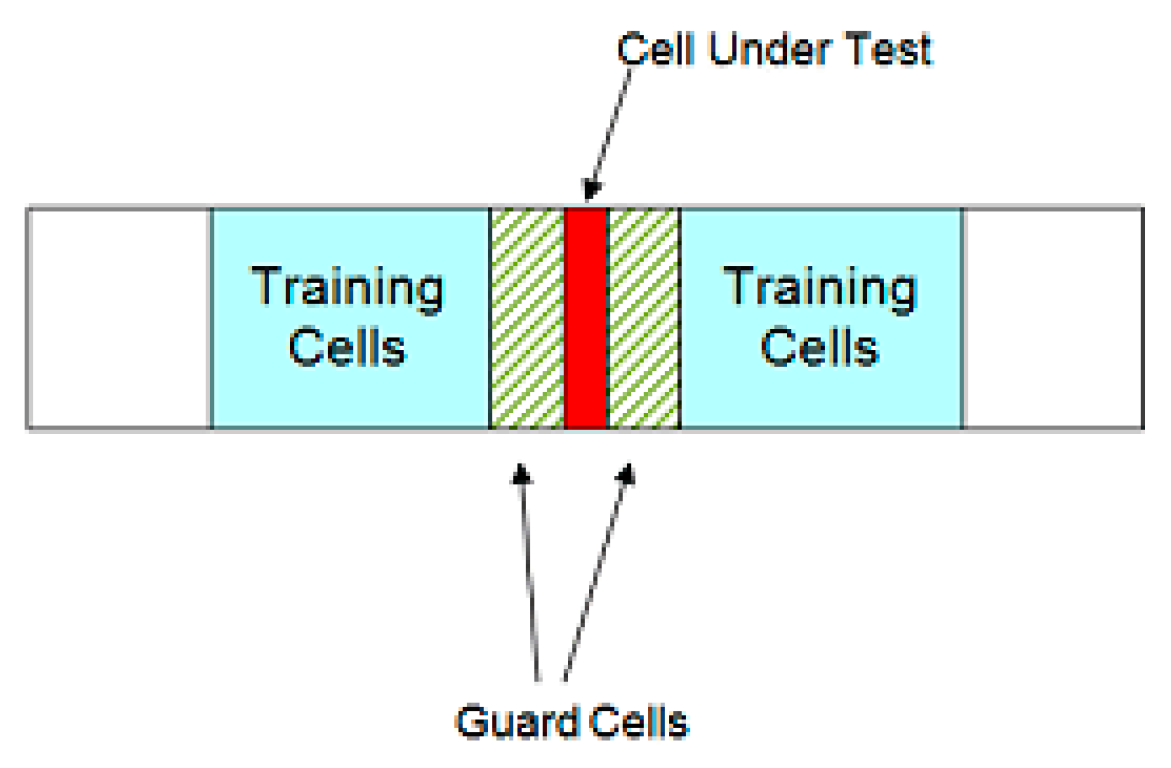
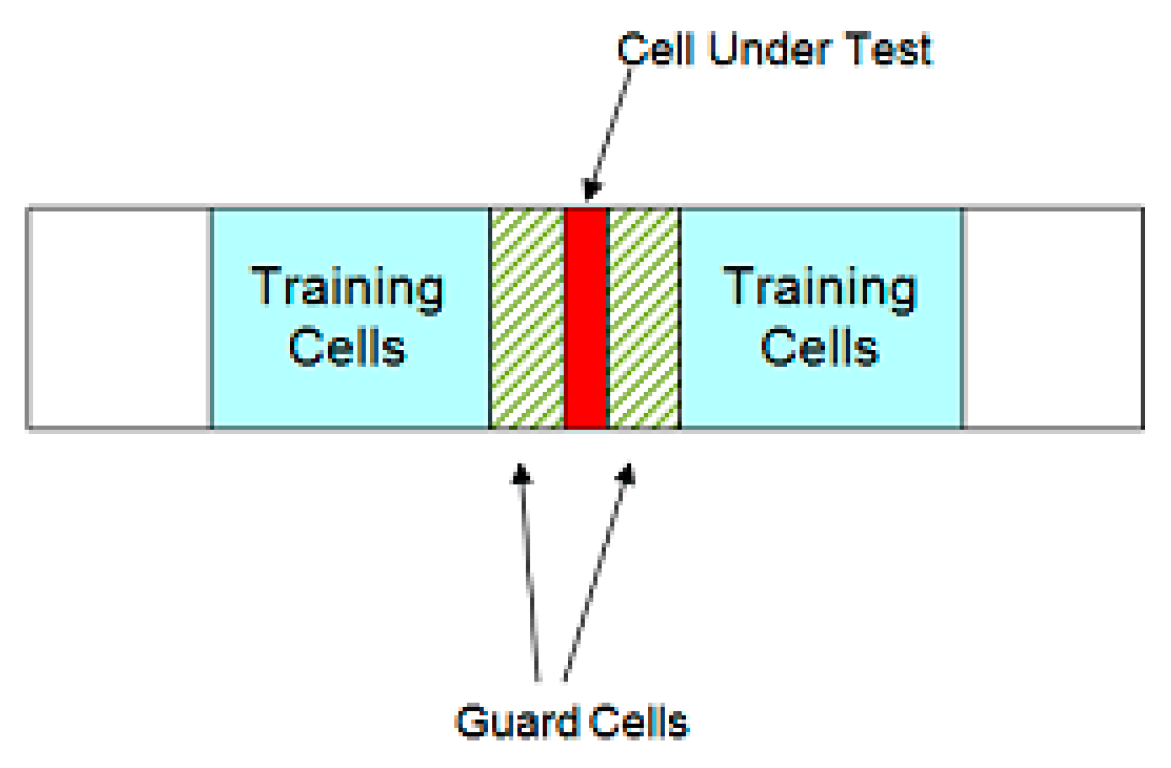
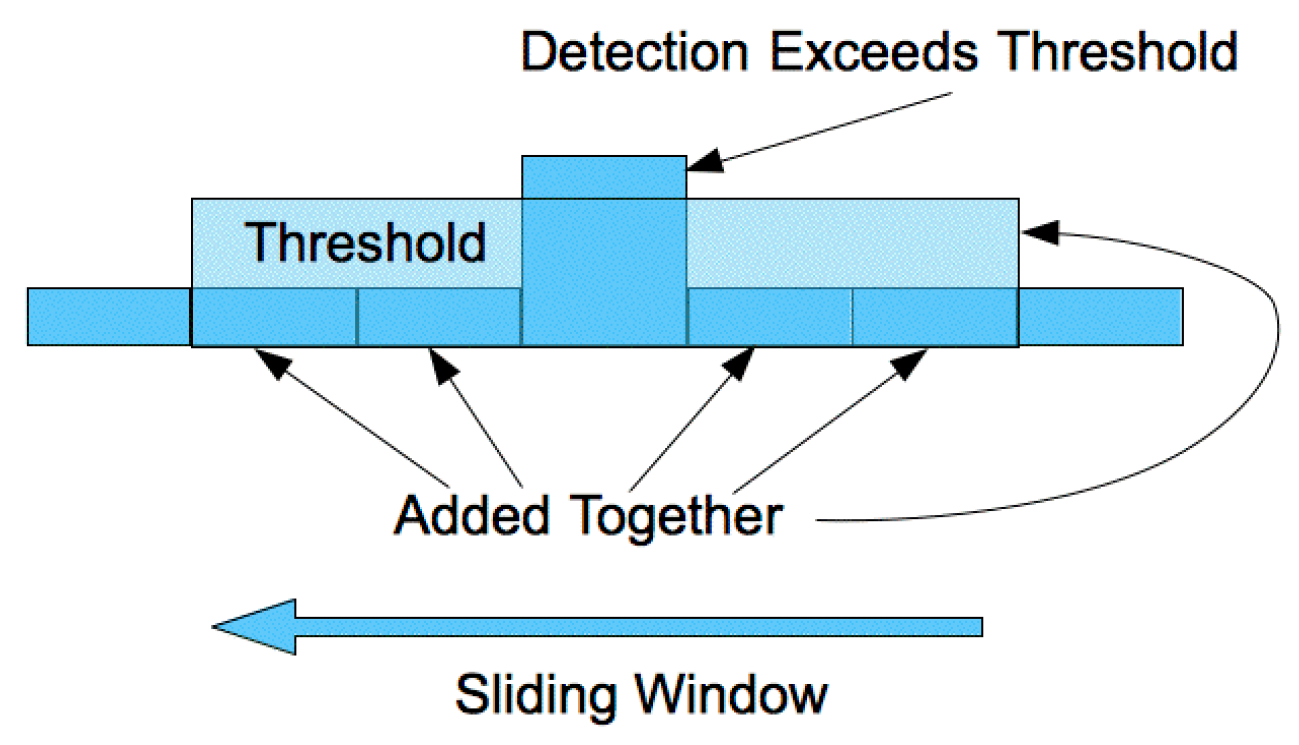
CFAR (Constant False-Alarm Rate Algorithm)
- CA-CFAR (Cell Averaging), Threshold = (AVGL + AVGR)/2;
- GO-CFAR (Greatest Of), Threshold = max(AVGL, AVGR);
- LO-CFAR (Least Of), Threshold = min(AVGL, AVGR).
ABF (Alpha-Beta filter)
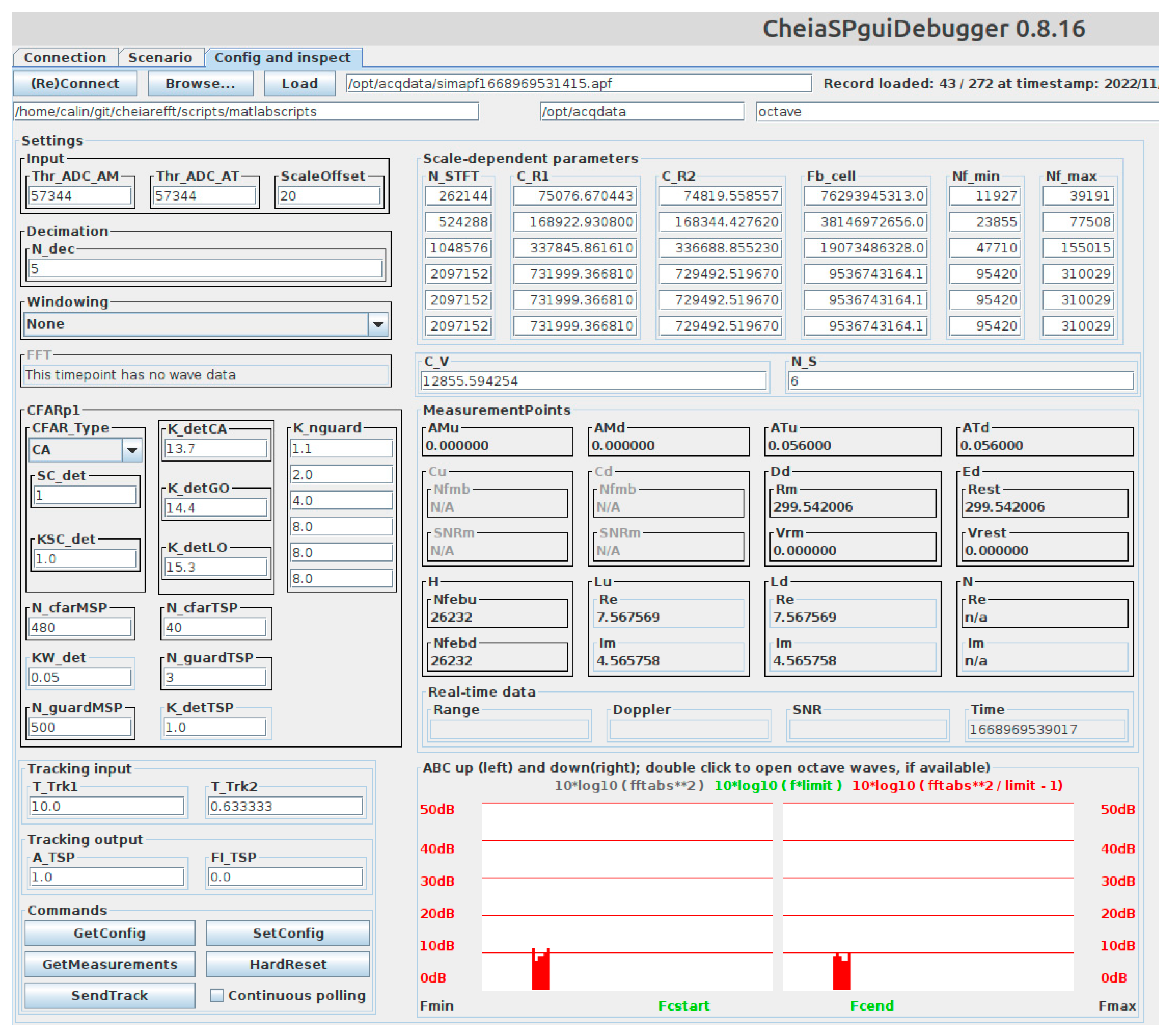
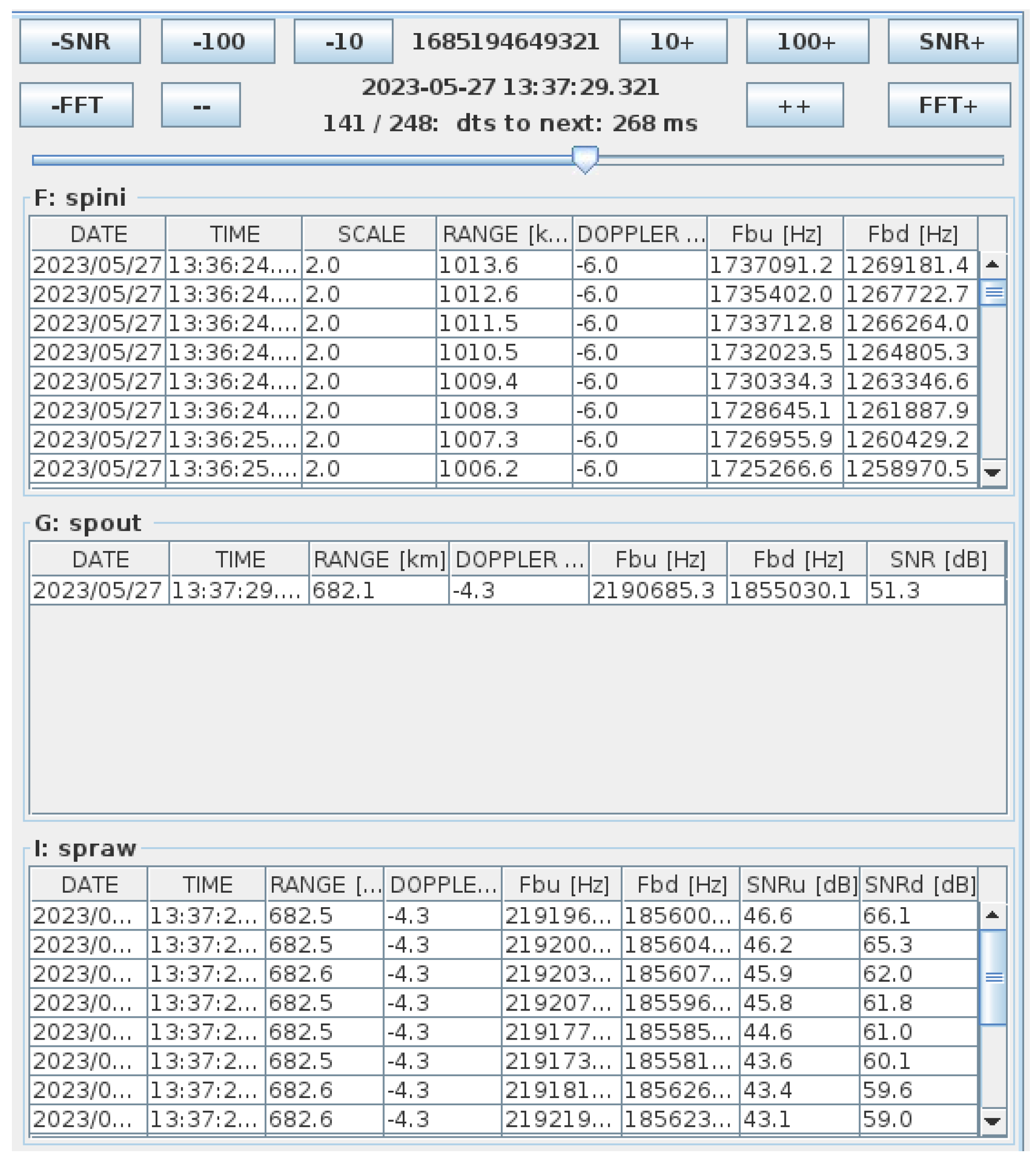
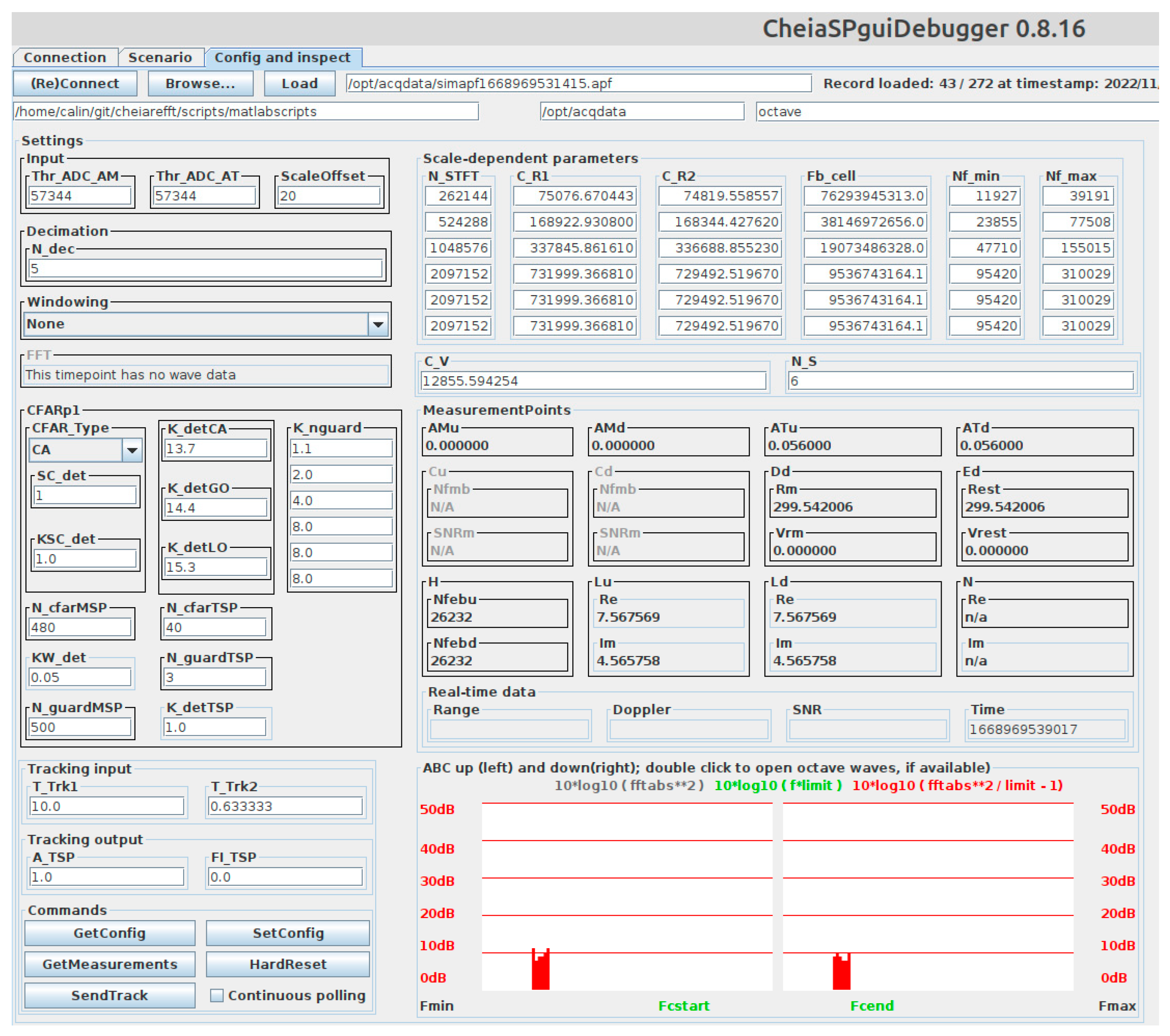
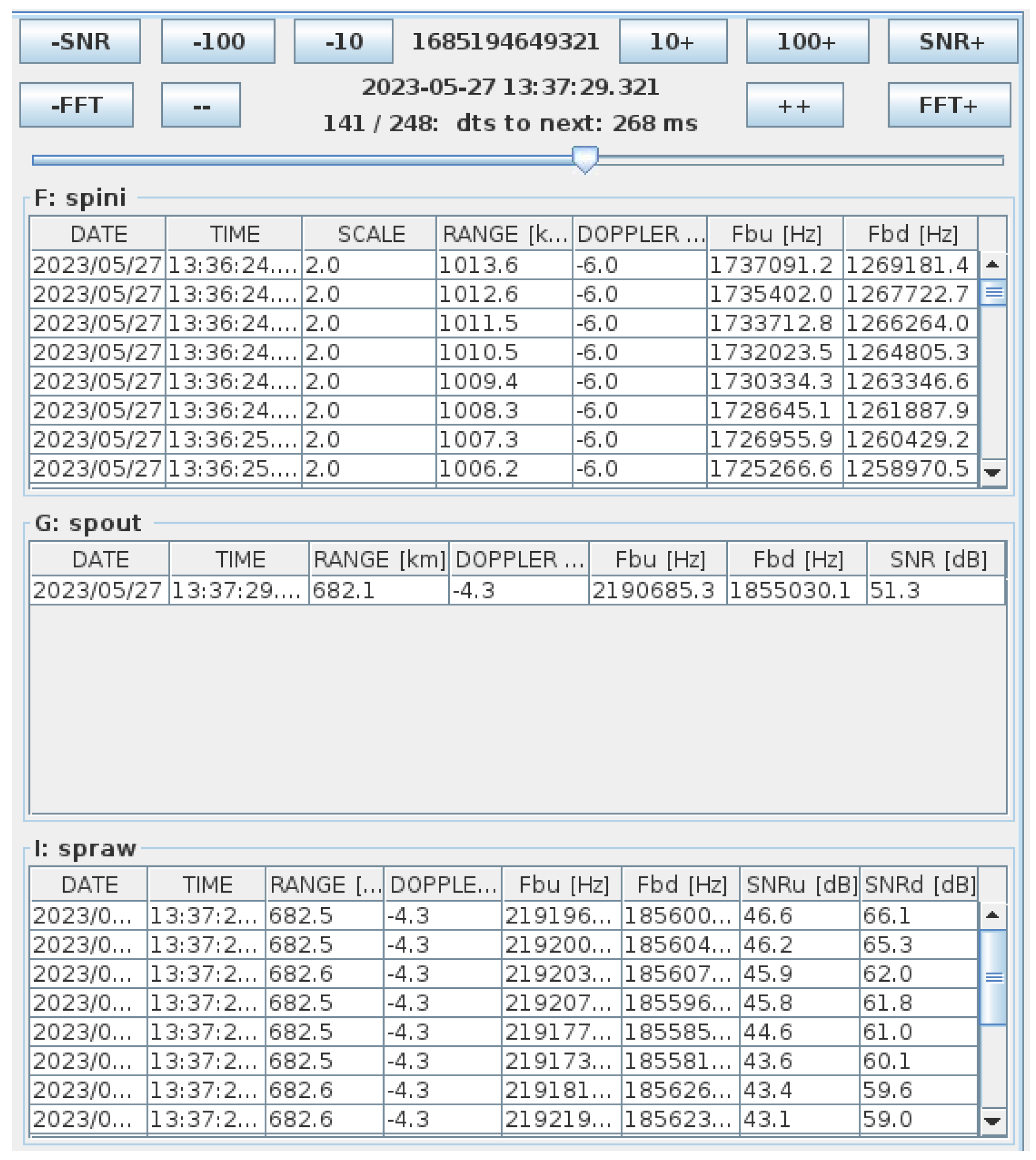
2.9. Graphical User Interface of Signal Processor (SP gui)
3. Results of the Signal Processor Benchmarking
- quality of computation
- performance of computation
3.1. Measuring the Quality of Digital Processing
3.1.1. Measuring the Quality of the FFT
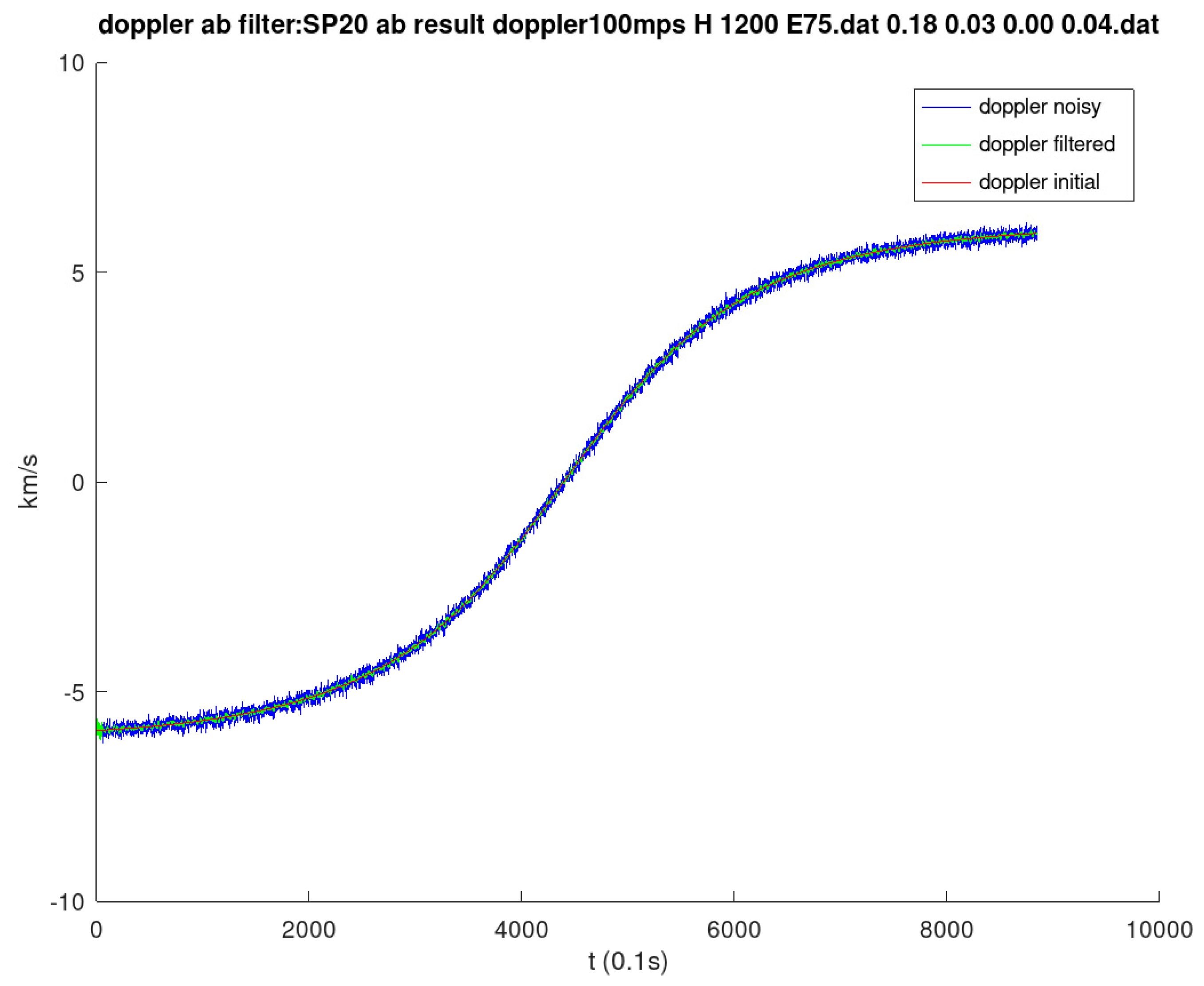
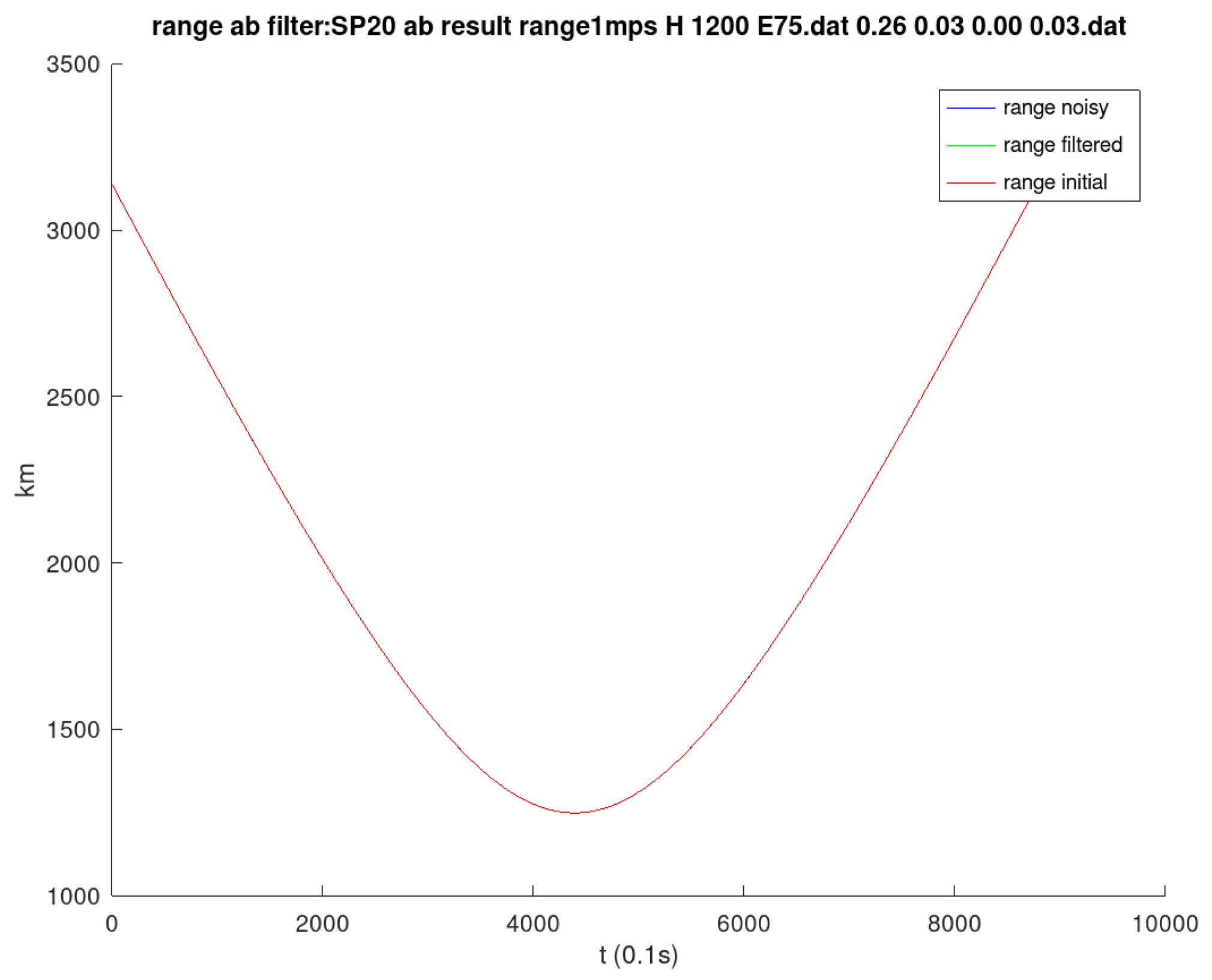
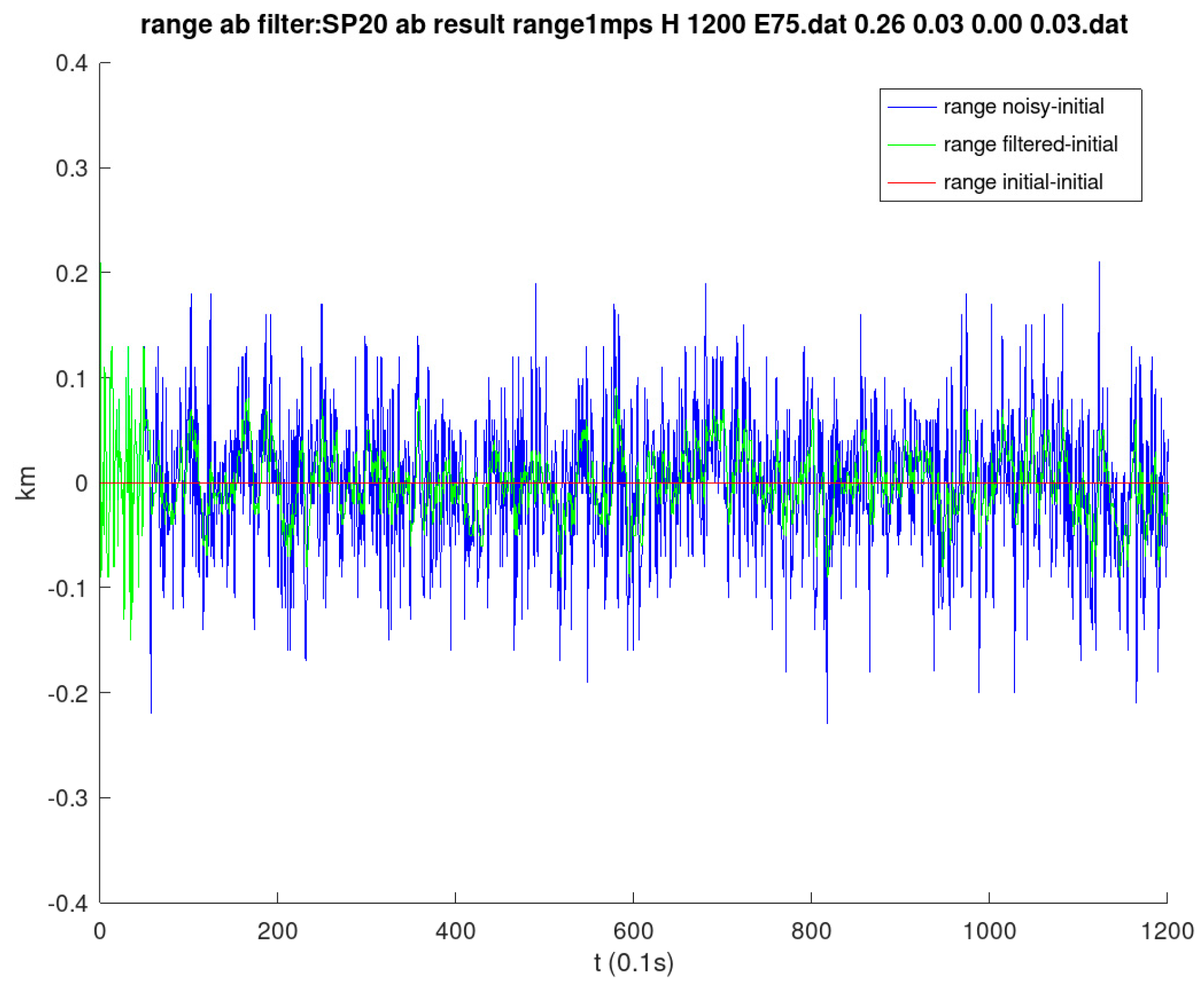
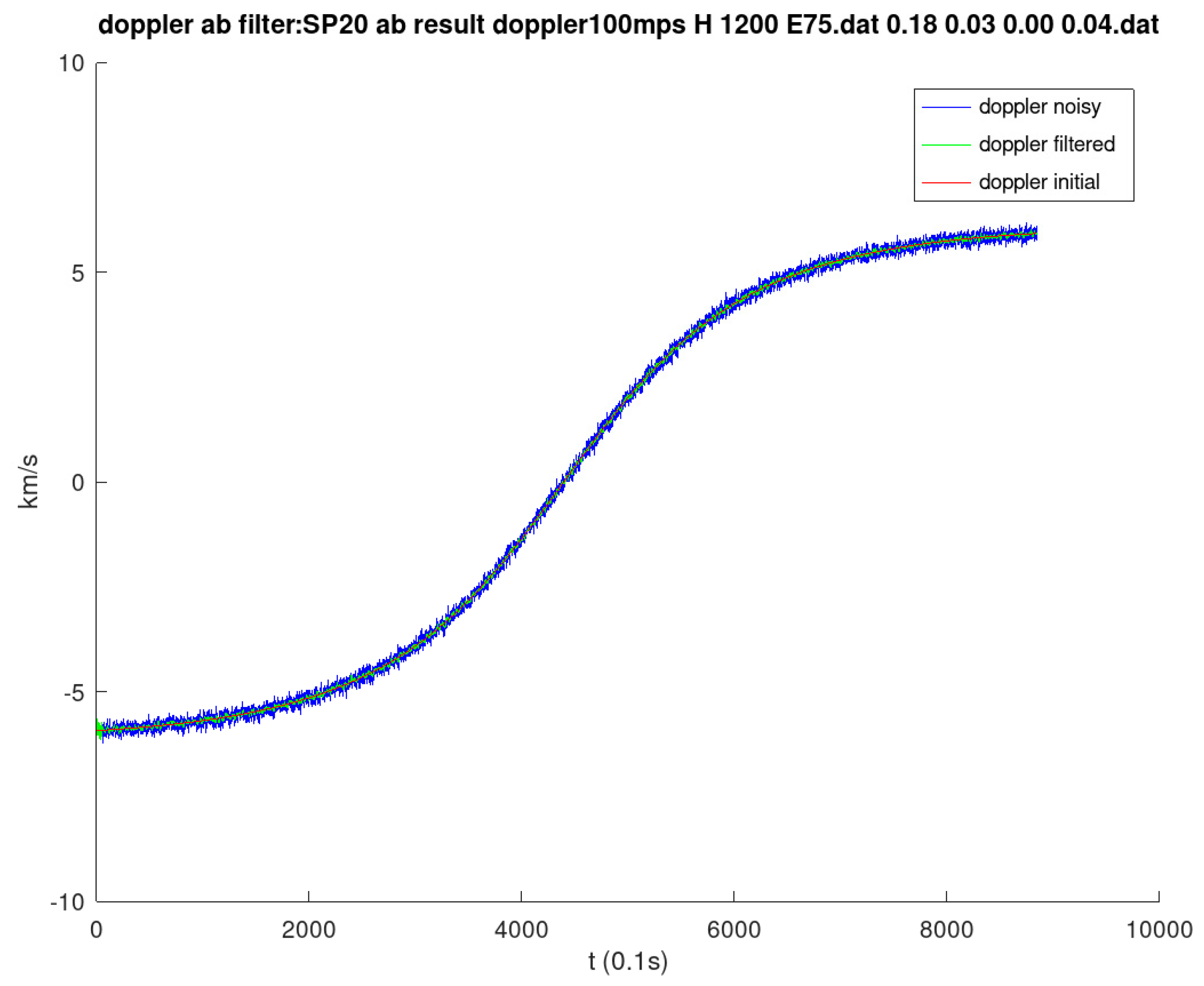
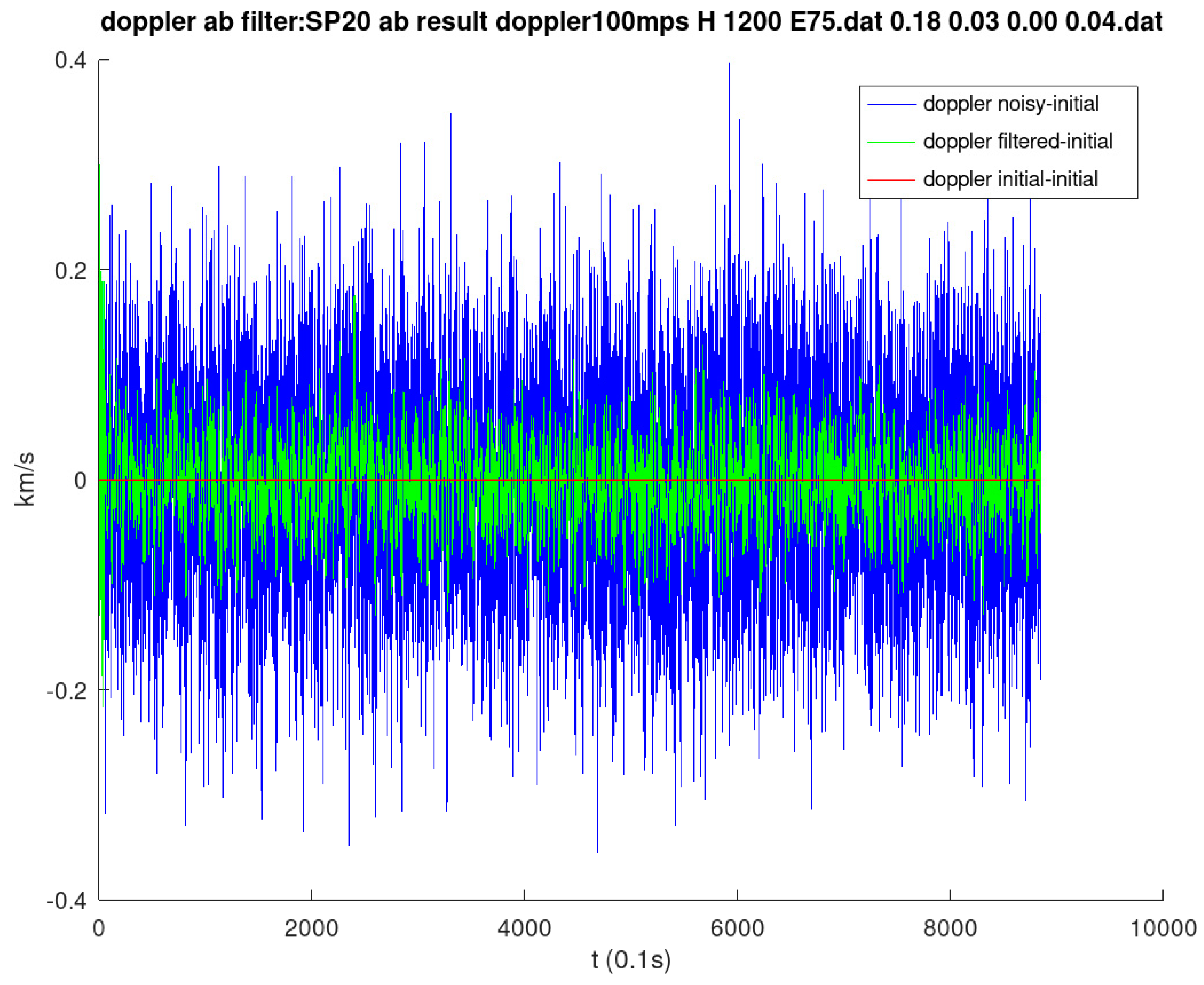
3.1.2. Measuring the Quality of the ABF
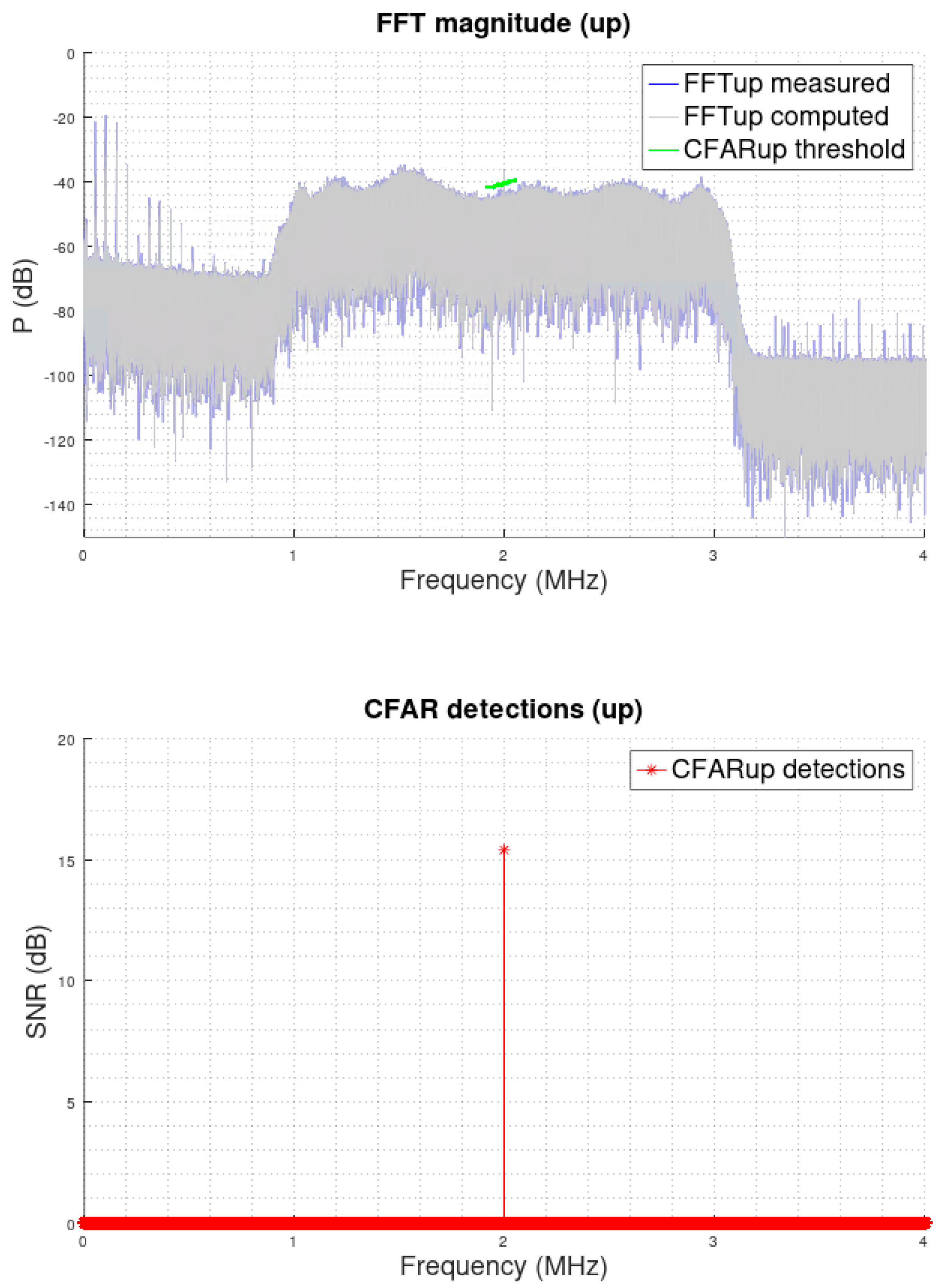
3.1.3. Checking the Quality of CFAR Algorithms
3.2. Measuring the Performance of Digital Processing
3.3. Measuring the Network Performance
- A NIC with 1 Gbps is used for command and control (an SP server listens on a TCP port);
- A NIC with 10 Gbps is used for large data transfer/long-term storage (over Samba/CIFS protocol).
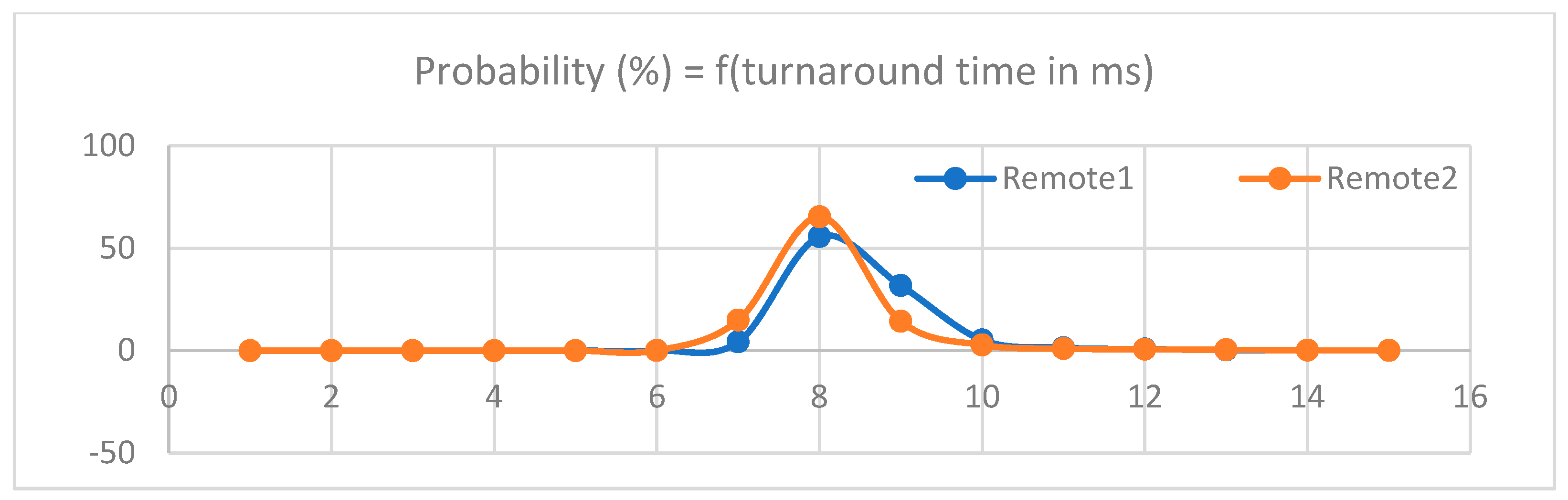
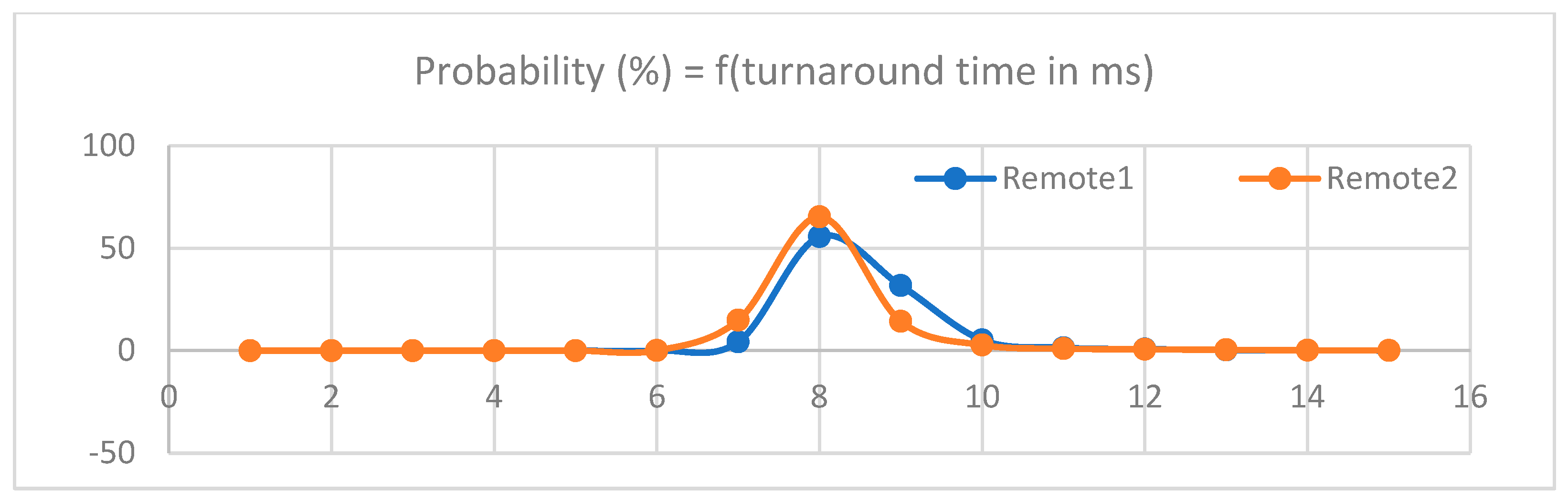
3.3.1. Measuring the Network Performance (Commands)
3.3.2. Measuring the Network Performance (Large Data)
- SP is powered-up and its main software starts;
- SP runs self-tests (speed and accuracy tests) to ensure correct operation;
- SP warms-up (builds a data cache with most common operations and compiles all the OpenCL programs to be run on GPU, to save time when executing a real-life measurement);
- The SP receives a command from the Monitor & Control (M&C) system, where the expected track during expected timestamps (beginning (T), ending and a few timestamps in the middle) are given;
- The SP arms itself, interpolates the track (with position and time data) at 100 ms;
- At about T-4 s a short system check is performed to make sure SP module work as expected; in case of problems various misbehaving subsystems are restarted;
- At about T-1 s, data acquisition starts (using a parallel software thread), but data are dropped until T time occurs;
- Data are acquired every 100 ms and are pushed into data queues. A separate software thread starts processing it. The SP switches from debug mode (acquiring and storing large data wave from ADC output, decimated output, FFT output, and CFAR output) to fast mode (only one debug wave is saved, usually the FFT output) dynamically depending on the time budget;
- When the acquisition end occurs, SP stops data acquisition and starts transferring output and debug data into the storage server; simultaneously the M&C system polls it to check the status and retrieve the results.
3.4. Performance Impact of Hardware and Digital Processing
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- EUSST Consortium. ESA Safeguarding European Space Infrastructure. Available online: https://www.eusst.eu/about-us/ (accessed on 2 July 2022).
- Societatea Naţională de Radiocomunicaţii S.A. (RADIOCOM), Centrul de Comunicaţii Prin Satelit CHEIA. Available online: https://www.radiocom.ro/Materiale/Cheia/Centrul%20de%20Comunicatii%20prin%20Satelit%20CHEIA.pdf (accessed on 2 February 2023).
- Ionescu, I.; Scagnoli, R.; Istriteanu, D.; Turcu, V. Cheia Antennas Retrofit to a Space Tracking Radar. In Proceedings of the European Space Agency 1st NEO and Debris Detection Conference NEOSST1, Darmstadt, Germany, 22–24 January 2019; Available online: https://conference.sdo.esoc.esa.int/proceedings/neosst1/paper/415/NEOSST1-paper415.pdf (accessed on 20 February 2023).
- Schirru, L.; Pisanu, T.; Podda, A. The Ad Hoc Back-End of the BIRALET Radar to Measure Slant-Range and Doppler Shift of Resident Space Objects. Electronics 2021, 10, 577. [Google Scholar] [CrossRef]
- Muntoni, G.; Schirru, L.; Montisci, G.; Pisanu, T.; Valente, G.; Ortu, P.; Concu, R.; Melis, A.; Urru, E.; Saba, A.; et al. A Space Debris-Dedicated Channel for the P-Band Receiver of the Sardinia Radio Telescope: A Detailed Description and Characterization. IEEE Antennas Propag. Mag. 2020, 62, 45–57. [Google Scholar] [CrossRef]
- Pandeirada, J.; Bergano, M.; Neves, J.; Marques, P.; Barbosa, D.; Coelho, B.; Ribeiro, V. Development of the First Portuguese Radar Tracking Sensor for Space Debris. Signals 2021, 2, 122–137. [Google Scholar] [CrossRef]
- Casado Gómez, R.; Martínez-Villa Salmerón, J.; Besso, P.; Alessandrini, M.; Pinna, G.; Prada, M. Initial operations of the breakthrough Spanish Space Surveillance and Tracking Radar (S3TSR) in the European context. In Proceedings of the 1st NEO and Debris Detection Conference, Darmstadt, Germany, 22–24 January 2019; Available online: https://conference.sdo.esoc.esa.int/proceedings/neosst1/pap`er/479 (accessed on 20 February 2023).
- Muntoni, G.; Montisci, G.; Pisanu, T.; Andronico, P.; Valente, G. Crowded Space: A Review on Radar Measurements for Space Debris Monitoring and Tracking. Appl. Sci. 2021, 11, 1364. [Google Scholar] [CrossRef]
- Space Observation Radar TIRA [Online]. Available online: https://www.fhr.fraunhofer.de/en/the-institute/technical-equipment/Space-observation-radar-TIRA.html (accessed on 27 May 2023).
- GESTRA Space Radar Passes Its First Test, [Online]. Available online: https://www.dlr.de/en/latest/news/2019/04/20191129_latest-radar-technology (accessed on 27 May 2023).
- GESTRA [Online]. Available online: https://www.radartutorial.eu/19.kartei/02.surv/karte075.en.html (accessed on 27 May 2023).
- Michal, T.; Eglizeaud, J.P.; Bouchard, J. GRAVES: The new French System for Space Surveillance. In Proceedings of the Fourth European Conference on Space Debris, Darmstadt, Germany, 18–20 April 2005. [Google Scholar]
- Saillant, S.; Flécheux, M.; Mourot, Y. Detection of ExoMars launcher during its passage over Europe with Space Surveillance radar breadboard. Adv. Sci. Technol. Eng. Syst. J. 2018, 3, 99–105. [Google Scholar] [CrossRef]
- Ladd, D.; Reeves, R.; Rumi, E.; Trethewey, M.; Fortescue, M.; Appleby, G.; Wilkinson, M.; Sherwood, R.; Ash, A.; Cooper, C.; et al. Technical Description of a Novel Sensor Network Architecture and Results of Radar and Optical Sensors contributing to a UK Cueing Experiment. In Proceedings of the Advanced Maui Optical and Space Surveillance (AMOS) Technologies Conference, Maui, HI, USA, 19–22 September 2017. [Google Scholar]
- Tatomirescu, A.; Rusu-Casandra, A. C-Band FMCW RADAR Receiver Architecture for Space Debris Observation. In Proceedings of the 2022 14th International Conference on Communications (COMM), Bucharest, Romania, 16–18 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Bira, C.; Rusu-Casandra, A. Dataset of Spatial Objects Acquired Using Romania’s First Ground-Based Space Tracking Radar. In Proceedings of the 14th International Conference on Communications COMM 2022, Bucharest, Romania, 16–18 June 2022. [Google Scholar] [CrossRef]
- Tramandan, I.; Rusu-Casandra, A. A Real-Time Monitoring and Command System for the Cheia Space Surveillance and Tracking Radar. In Proceedings of the 2022 International Symposium on Electronics and Telecommunications (ISETC), Timisoara, Romania, 10–11 November 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Ionescu, L.; Rusu-Casandra, A.; Bira, C.; Tatomirescu, A.; Tramandan, I.; Scagnoli, R.; Istriteanu, D.; Popa, A.E. Development of the Romanian Radar Sensor for Space Surveillance and Tracking Activities. Sensors 2022, 22, 3546. [Google Scholar] [CrossRef] [PubMed]
- MathWorks Help Center, Constant False Alarm Rate (CFAR) Detection [Online]. Available online: https://nl.mathworks.com/help/phased/ug/constant-false-alarm-rate-cfar-detection.html (accessed on 20 February 2023).
- Constant False Alarm Rate (CFAR) [Online]. Available online: https://www.wikiwand.com/en/Constant_false_alarm_rate (accessed on 20 February 2023).
- USRP-2954 Specifications [Online]. Available online: https://www.ni.com/docs/en-US/bundle/usrp-2954-specs/page/specs.html (accessed on 27 May 2023).


| Component Type | Model | Purpose |
|---|---|---|
| CPU | Intel(R) Xeon(R) W-3223 8C/16T @ 3.50 GHz | Runs the OS. Moves data to/from GPU, builds logs, assures command and control |
| GPU | Tesla V100S-32 GB/5 k cores | SIMD accelerator: parallel processing for digital wave data |
| ADCs | AlazarTech ATS9462, 2 × 16-bit data @ 180 MSa/s | Acquires analog data from the receiver and converts it to digital data |
| NIC | 10 Gbps | Interface used to transfer acquired data to storage server |
| NIC | 1 Gbps | Interface used to receive command and control from M&C system |
| SSDs | 1TB PCI-x4 NVMe, Samsung SM981/PM891/PM983 | Short-term data storage before transfer to storage server |
| RAM | 3 × 32 GB DDR4 2933 MT/s | Working memory |
| Param Index | Param Name | Param Type | Param Description |
|---|---|---|---|
| 1 | Thr_ADC_AM | Int32 | (1) ADC level—threshold value for MSP |
| 3 | N_Thresh_AM | Int32 | Percent of detections over threshold @ 10 k |
| 5 | N_dec | Int32 | Decimation factor |
| 6 | N_S | Int32 | Number of range scales (4, 5 or 6) |
| 7 | N_STFT | Int32array | Size for Fourier transforms |
| 8 | W_Type | Int32 | Windowing type |
| 9 | N_cfarSP | Int32 | CFAR Number of samples used for avg |
| 10 | N_guardSP | Int32 | CFAR Number of guard samples |
| 11 | K_detCA | Int32 | CA-CFAR Detection factor |
| 12 | K_detGO | Int32 | GO-CFAR Detection factor |
| 13 | K_detLO | Int32 | LO-CFAR Detection factor |
| 14 | CFAR_Type | Text | CFAR algorithm type (CA, GO, LO) |
| 15 | KW_det | Fp64 | Detection window coefficient for the beat frequencies |
| 16 | SFW_det | Fp64 | Scale factor for computing the CFAR windows on all scales |
| 17 | SC_det | Int32 | MSP detections selection criteria |
| 18 | KSC_det | Fp64 | MSP multiple detection selection coefficient |
| 19 | S_Max | Int32array | Maximum range for all scales |
| 20 | T_trig | Int32array | Trigger period (UP-DOWN-UP) for all scales |
| 21 | Nf_min | Int32array | Min freq bin cell to be processed in all scales |
| 22 | Nf_max | Int32array | Max freq bin cell to be processed in all scales |
| 23 | C_R1 | Int32array | Range computation factor 1 for fbu in all scales |
| 24 | C_R2 | Int32array | Range computation factor 2 for fbu in all scales |
| 25 | C_V | Int32array | Doppler computation factor in all scales |
| 26 | Fb_cell | Int32array | STFT frequency cell on all scales |
| 27 | R_alpha | Fp64 | Range ABG filter coefficient—alpha |
| 28 | R_beta | Fp64 | Range ABG filter coefficient—beta |
| 29 | R_gamma | Fp64 | Range ABG filter coefficient—gamma |
| 30 | V_alpha | Fp64 | Doppler ABG filter coefficient—alpha |
| 31 | V_beta | Fp64 | Doppler ABG filter coefficient—beta |
| 32 | V_gamma | Fp64 | Doppler ABG filter coefficient—gamma |
| FFT Size | CPU rms Error | GPU rms Error | Allowed Error |
|---|---|---|---|
| 512 | 2.99 × 10−15 | 3.01 × 10−15 | 1 × 10−9 |
| 128 k | 8.48 × 10−14 | 8.27 × 10−14 | 1 × 10−9 |
| 256 k | 9.47 × 10−14 | 1.00 × 10−13 | 1 × 10−9 |
| 512 k | 1.28 × 10−13 | 1.28 × 10−13 | 1 × 10−9 |
| 1024 k | n/a | 1.93 × 10−13 | 1 × 10−9 |
| 2048 k | n/a | 2.91 × 10−13 | 1 × 10−9 |
| 4096 k | n/a | 4.18 × 10−9 | 1 × 10−9 |
| Operations (ops) | GPUa (ms) | GPU (ms) | CPU (ms) |
|---|---|---|---|
| DEC 1 | 60 | 198 | 16 |
| COPY | 15 | 105 | 1 |
| FFT | 15 | 126 | 5 |
| ABS | 15 | 116 | 5 |
| CFAR | 16 | n/a | 13 |
| WIN | 15 | 119 | 28 |
| FFT_ABS | 16 | 174 | 40 |
| FFT_ABS_CFAR | 17 | 134 | 25 |
| WIN_FFT_ABS_CFAR | 16 | 133 | 30 |
| Characteristic Name | Local | Remote1 1 | Remote2 2 | Units |
|---|---|---|---|---|
| Turnaround time (min) | 0 | 6 | 6 | milliseconds |
| Turnaround time (avg) | 0.22 | 8.52 | 8.70 | milliseconds |
| Turnaround time (max) | 5 | 32 | 234 | milliseconds |
| Characteristic Name | CHEIA | Units |
|---|---|---|
| Data rate (min) | 392 | MB/s |
| Data rate (avg) | 450 | MB/s |
| Data rate (max) | 525 | MB/s |
| Characteristic Name | BIRALET | Cheia | Units |
|---|---|---|---|
| Frequency stability | 5 × 10−9 * | 3 × 10−12 | Hz |
| Phase noise | ?? | −130 | dBc/Hz |
| Receiver noise coef. | 5–7 * | 1.74 | dB |
| Rx ADC resolution | 14 * | 16 | bits |
| Max receiver gain | 37.5 * | 63 | dB |
| Receiver bandwidth | 5 ^ | 2 1 | MHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bîră, C.; Ionescu, L.; Rusu-Casandra, A. The Radar Signal Processor of the First Romanian Space Surveillance Radar. Remote Sens. 2023, 15, 3630. https://doi.org/10.3390/rs15143630
Bîră C, Ionescu L, Rusu-Casandra A. The Radar Signal Processor of the First Romanian Space Surveillance Radar. Remote Sensing. 2023; 15(14):3630. https://doi.org/10.3390/rs15143630
Chicago/Turabian StyleBîră, Călin, Liviu Ionescu, and Alexandru Rusu-Casandra. 2023. "The Radar Signal Processor of the First Romanian Space Surveillance Radar" Remote Sensing 15, no. 14: 3630. https://doi.org/10.3390/rs15143630
APA StyleBîră, C., Ionescu, L., & Rusu-Casandra, A. (2023). The Radar Signal Processor of the First Romanian Space Surveillance Radar. Remote Sensing, 15(14), 3630. https://doi.org/10.3390/rs15143630