
A Time Delay Calibration Technique for Improving Broadband Lightning Interferometer Locating
 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Observation and Methods
3. Results
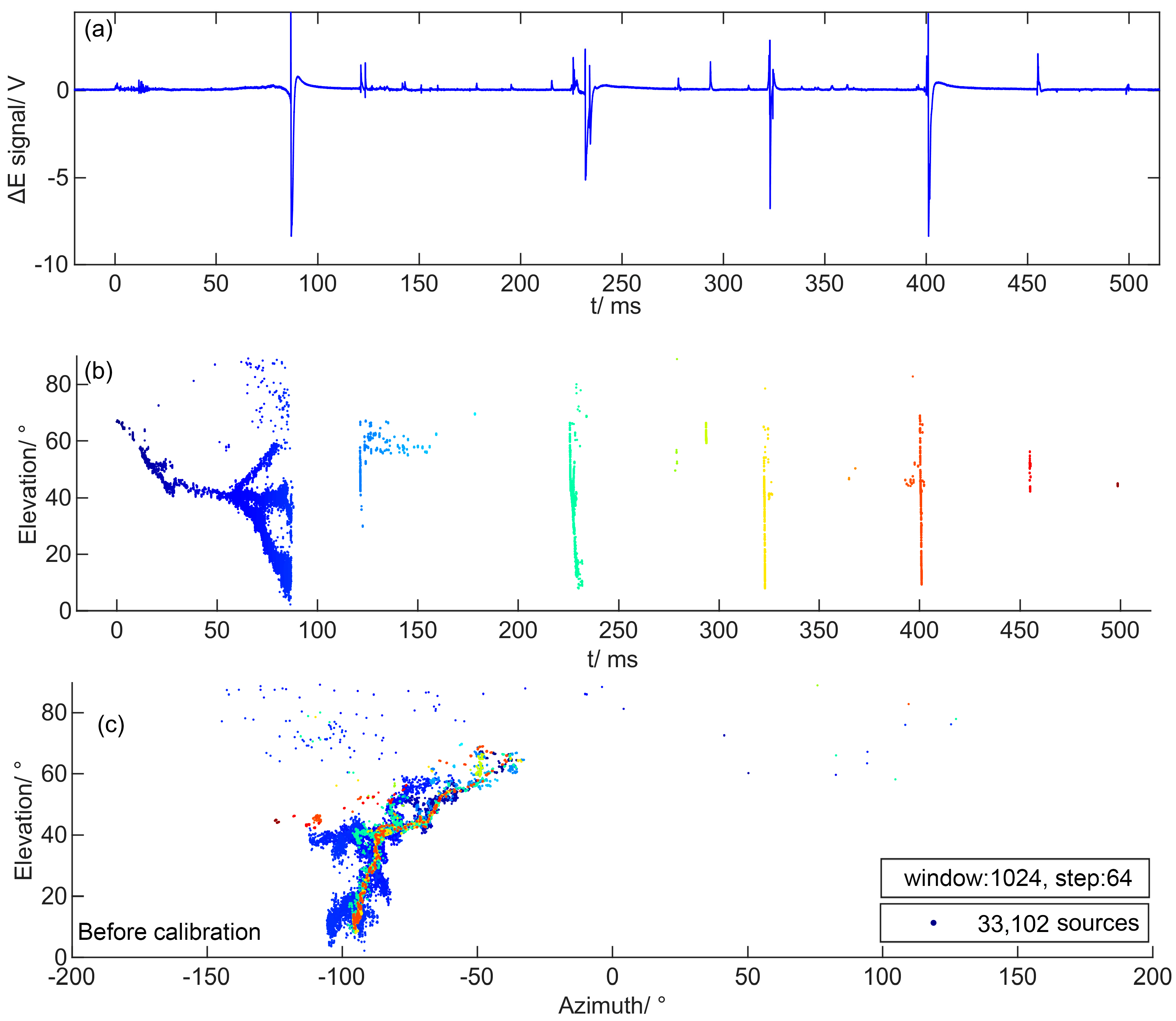
3.1. Observation Data
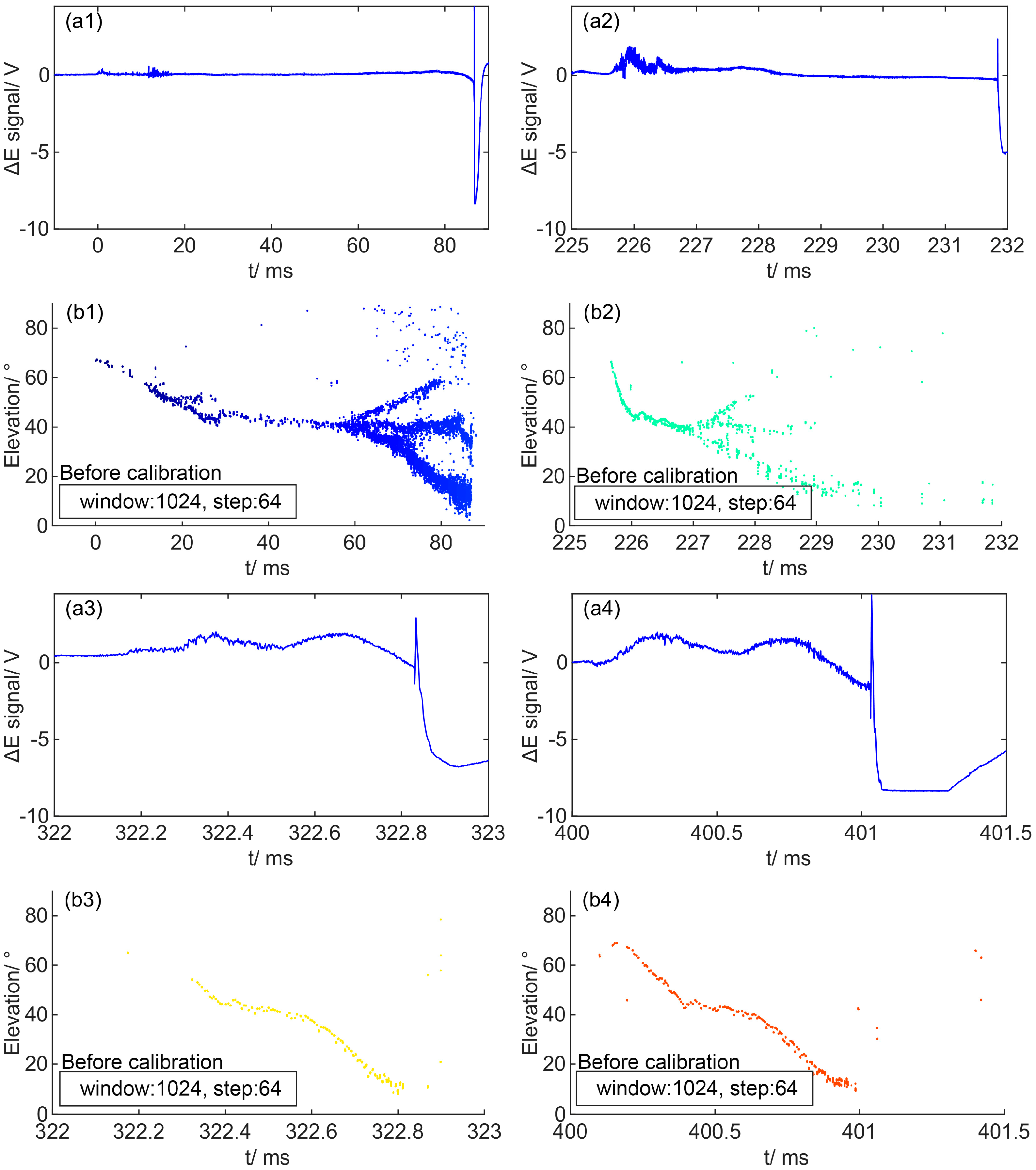
3.2. Locating Results with Reduced Analysis Window before and after Time Delay Calibration
3.3. Effect of Time Delay Calibration on Residual and Correlation Coefficient in Locating Calculation
3.4. Locating Results and Quality Control after Further Narrowing the Analysis Window
4. Discussion
5. Conclusions
- (1)
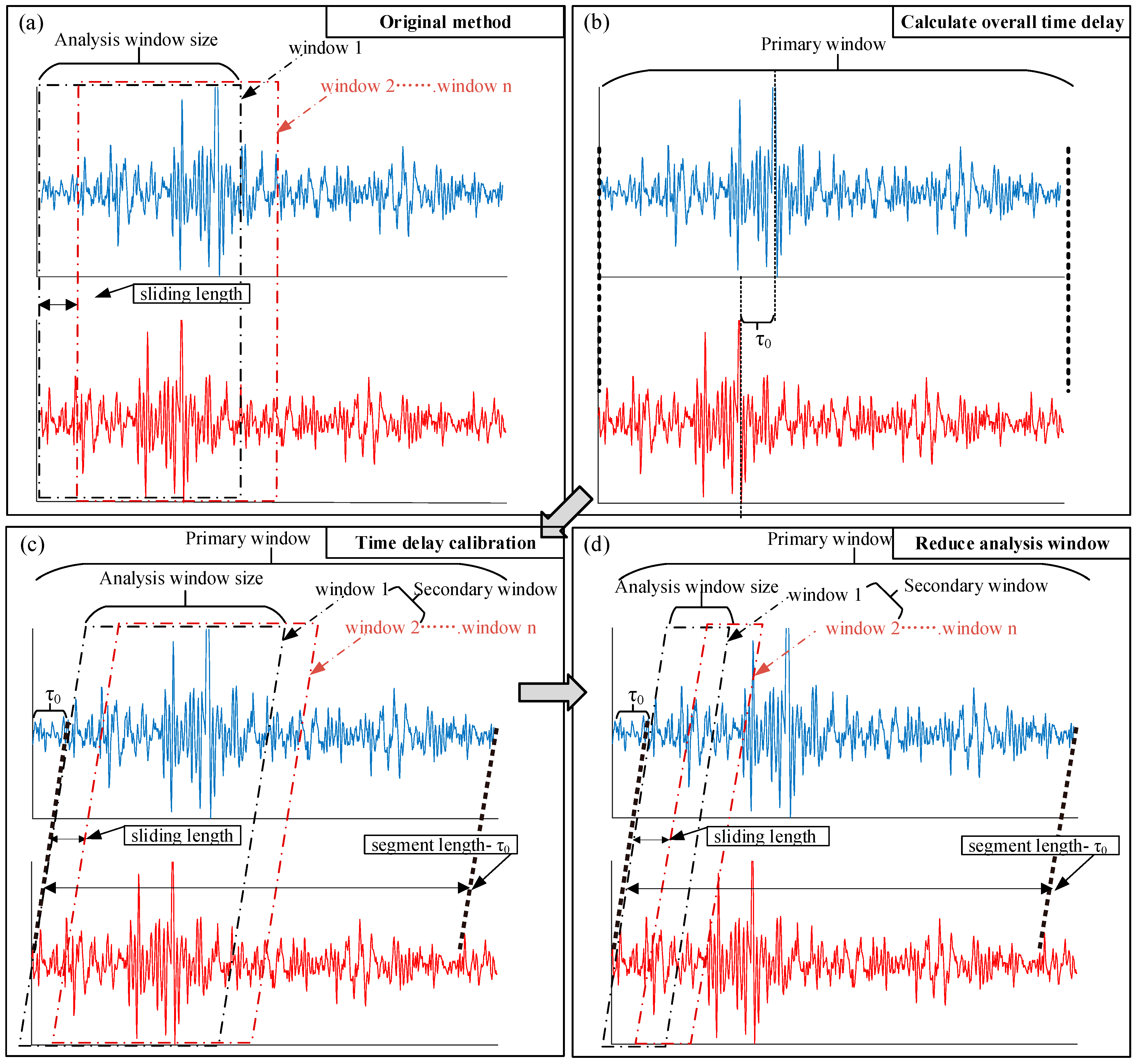
- The use of the time delay calibration method can solve the problem of increased noise in the location results and improve the location effect when the data analysis window length is reduced.
- (2)
- After using the time delay calibration method, the correlation coefficient obtained via cross-correlation calculation in the process of locating calculation is improved, that is, this method improves the consistency of signals in the analysis window, and makes the input signals of locating calculation more stable and reasonable, thus improving the quality of the output results.
- (3)
- The correlation coefficient obtained via cross-correlation calculation in the locating calculation process can be used for the quality control of the locating results.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rison, W.; Thomas, R.J.; Krehbiel, P.R.; Hamlin, T.; Harlin, J. A GPS-based three-dimensional lightning mapping system: Initial observations in central New Mexico. Geophys. Res. Lett. 1999, 26, 3573–3576. [Google Scholar] [CrossRef]
- Thomas, R.J.; Krehbiel, P.R.; Rison, W.; Hunyady, S.J.; Winn, W.P.; Hamlin, T.; Harlin, J. Accuracy of the Lightning Mapping Array. J. Geophys. Res. Atmos. 2004, 109, D14207. [Google Scholar] [CrossRef]
- Rhodes, C.T.; Shao, X.M.; Krehbiel, P.R.; Thomas, R.J.; Hayenga, C.O. Observations of lightning phenomena using radio interferometry. J. Geophys. Res. Atmos. 1994, 99, 13059–13082. [Google Scholar] [CrossRef]
- Liu, H.; Dong, W.; Wu, T.; Zheng, D.; Zhang, Y. Observation of compact intracloud discharges using VHF broadband interferometers. J. Geophys. Res. Atmos. 2012, 117, D1203. [Google Scholar] [CrossRef]
- Yoshihashi, S.; Kawasaki, I.; Matsuura, K.; Isoda, H.; Sonoi, Y. 3D imaging of lightning channel and leader progression velocity. Electr. Eng. Jpn. 2001, 137, 22–28. [Google Scholar] [CrossRef]
- Liu, H.; Qiu, S.; Dong, W. The Three-Dimensional Locating of VHF Broadband Lightning Interferometers. Atmosphere 2018, 9, 317. [Google Scholar] [CrossRef]
- Sun, Z.; Qie, X.; Liu, M.; Jiang, R.; Zhang, H. Three-Dimensional Mapping on Lightning Discharge Processes Using Two VHF Broadband Interferometers. Remote Sens. 2022, 14, 6378. [Google Scholar] [CrossRef]
- Hare, B.M.; Scholten, O.; Dwyer, J.; Trinh, T.N.G.; Buitink, S.; ter Veen, S.; Bonardi, A.; Corstanje, A.; Falcke, H.; Hörandel, J.R.; et al. Needle-like structures discovered on positively charged lightning branches. Nature 2019, 568, 360–363. [Google Scholar] [CrossRef]
- Scholten, O.; Hare, B.M.; Dwyer, J.; Liu, N.; Sterpka, C.; Kolmasov, I.; Santolik, O.; Lan, R.; Uhlir, L.; Buitink, S. Interferometric imaging of Intensely Radiating Negative Leaders. Phys. Rev. D 2022, 105, 062007. [Google Scholar] [CrossRef]
- Scholten, O.; Hare, B.M.; Dwyer, J.; Sterpka, C.; Kolmašová, I.; Santolík, O.; Lán, R.; Uhlíř, L.; Buitink, S.; Corstanje, A.; et al. The Initial Stage of Cloud Lightning Imaged in High-Resolution. JGR Atmos. 2021, 126, e2020JD033126. [Google Scholar] [CrossRef]
- Shao, X.M.; Krehbiel, P.R. The spatial and temporal development of intracloud lightning. J. Geophys. Res. Atmos. 1996, 101, 26641–26668. [Google Scholar] [CrossRef]
- Ushio, T.; Kawasaki, Z.I.; Ohta, Y.; Matsuura, K. Broad Band Interferometric Measurement of Rocket Triggered Lightning in Japan. Geophys. Res. Lett. 1997, 24, 2769–2772. [Google Scholar] [CrossRef]
- Shao, X.M.; Holden, D.N.; Rhodes, C.T. Broad Band Radio Interferometry for Lightning Observations. Geophys. Res. Lett. 1996, 23, 1917–1920. [Google Scholar] [CrossRef]
- Kawasaki, Z.; Mardiana, R.; Ushio, T. Broadband and Narrowband RF Interferometers for Lightning Observations. Geophys. Res. Lett. 2000, 27, 3189–3192. [Google Scholar] [CrossRef]
- Dong, W.; Liu, X.; Yu, Y.; Zhang, Y. Broadband interferometer observations of a triggered lightning. Chin. Sci. Bull. 2001, 46, 1561–1565. [Google Scholar] [CrossRef]
- Zhang, G.; Zhao, Y.; Qie, X.; Zhang, T.; Wang, Y.; Chen, C. Observation and study on the whole process of cloud-to-ground lightning using narrowband radio interferometer. Sci. China Ser. D-Earth Sci. 2008, 51, 694–708. [Google Scholar] [CrossRef]
- Li, Y.; Qiu, S.; Shi, L.; Huang, Z.; Wang, T.; Duan, Y. Three-Dimensional Reconstruction of Cloud-to-Ground Lightning Using High-Speed Video and VHF Broadband Interferometer. J. Geophys. Res. Atmos. 2017, 122, 13, 413–420, 435. [Google Scholar] [CrossRef]
- Yoshida, S.; Biagi, C.J.; Rakov, V.A.; Hill, J.D.; Stapleton, M.V.; Jordan, D.M.; Uman, M.A.; Morimoto, T.; Ushio, T.; Kawasaki, Z.I. Three-dimensional imaging of upward positive leaders in triggered lightning using VHF broadband digital interferometers. Geophys. Res. Lett. 2010, 37, L5805. [Google Scholar] [CrossRef]
- Jensen, D.P.; Sonnenfeld, R.G.; Stanley, M.A.; Edens, H.E.; Da Silva, C.L.; Krehbiel, P.R. Dart-Leader and K-Leader Velocity From Initiation Site to Termination Time-Resolved with 3D Interferometry. Geophys. Res. Atmos. 2021, 126, e2020JD034309. [Google Scholar] [CrossRef]
- Stock, M.G.; Akita, M.; Krehbiel, P.R.; Rison, W.; Edens, H.E.; Kawasaki, Z.; Stanley, M.A. Continuous broadband digital interferometry of lightning using a generalized cross-correlation algorithm. J. Geophys. Res. Atmos. 2014, 119, 3134–3165. [Google Scholar] [CrossRef]
- Lyu, F.; Cummer, S.A.; Qin, Z.; Chen, M. Lightning Initiation Processes Imaged With Very High Frequency Broadband Interferometry. J. Geophys. Res. Atmos. 2019, 124, 2994–3004. [Google Scholar] [CrossRef]
- Pu, Y.; Cummer, S.A. Needles and Lightning Leader Dynamics Imaged with 100–200 MHz Broadband VHF Interferometry. Geophys. Res. Lett. 2019, 46, 13556–13563. [Google Scholar] [CrossRef]
- Qiu, S.; Zhou, B.H.; Shi, L.H.; Dong, W.S.; Zhang, Y.J.; Gao, T.C. An improved method for broadband interferometric lightning location using wavelet transforms. J. Geophys. Res. 2009, 114, D18211. [Google Scholar] [CrossRef]
- Mardiana, R.; Kawasaki, Z.I. Dependency of VHF Broad Band Lightning Source Mapping on Fourier Spectra. Geophys. Res. Lett. 2000, 27, 2917–2920. [Google Scholar] [CrossRef]
- Shi, Q.; Bo, Y.; Wansheng, D.; Taichang, G. Application of correlation time delay estimation in broadband interferometer for lightning detection. Sci. Meteorol. Sin. 2009, 29, 92–96. [Google Scholar]
- Sun, Z.; Qie, X.; Liu, M.; Cao, D.; Wang, D. Lightning VHF radiation location system based on short-baseline TDOA technique—Validation in rocket-triggered lightning. Atmos. Res. 2013, 129–130, 58–66. [Google Scholar] [CrossRef]
- Akita, M.; Stock, M.; Kawasaki, Z.; Krehbiel, P.; Rison, W.; Stanley, M. Data processing procedure using distribution of slopes of phase differences for broadband VHF interferometer. J. Geophys. Res. Atmos. 2014, 119, 6085–6104. [Google Scholar] [CrossRef]
- Stock, M.; Krehbiel, P. Multiple baseline lightning interferometry—Improving the detection of low amplitude VHF sources. In Proceedings of the International conference on Lightning Protection, Shanghai, China, 11–18 October 2014; pp. 293–300. [Google Scholar]
- Wang, T.; Qiu, S.; Shi, L.; Li, Y. Broadband VHF Localization of Lightning Radiation Sources by EMTR. IEEE Trans. Electromagn. Compat. 2017, 59, 1949–1957. [Google Scholar] [CrossRef]
- Wang, T.; Shi, L.; Qiu, S.; Sun, Z.; Duan, Y. Continuous broadband lightning VHF mapping array using MUSIC algorithm. Atmos. Res. 2020, 231, 104647. [Google Scholar] [CrossRef]
- Li, S.L.; Qiu, S.; Shi, L.H.; Li, Y.; Duan, Y.T. Broadband very high frequency localization of lightning radiation sources based on orthogonal propagator method. Acta Physica Sin. 2019, 68, 279–287. [Google Scholar] [CrossRef]
- Li, F.; Sun, Z.; Liu, M.; Yuan, S.; Wei, L.; Sun, C.; Lyu, H.; Zhu, K.; Tang, G. A New Hybrid Algorithm to Image Lightning Channels Combining the Time Difference of Arrival Technique and Electromagnetic Time Reversal Technique. Remote Sens. 2021, 13, 4658. [Google Scholar] [CrossRef]
- Shao, X.M.; Ho, C.; Bowers, G.; Blaine, W.; Dingus, B. Lightning Interferometry Uncertainty, Beam Steering Interferometry, and Evidence of Lightning Being Ignited by a Cosmic Ray Shower. J. Geophys. Res. Atmos. 2020, 125, e2019JD032273. [Google Scholar] [CrossRef]
- Fan, X.P.; Zhang, Y.J.; Zheng, D.; Zhang, Y.; Lyu, W.T.; Liu, H.Y.; Xu, L.T. A New Method of Three-Dimensional Location for Low-frequency Electric Field Detection Array. J. Geophys. Res. Atmos. 2018, 123, 8792–8812. [Google Scholar] [CrossRef]
- Lyu, F.; Cummer, S.A.; Solanki, R.; Weinert, J.; McTague, L.; Katko, A.; Barrett, J.; Zigoneanu, L.; Xie, Y.; Wang, W. A low-frequency near-field interferometric-TOA 3-D Lightning Mapping Array. Geophys. Res. Lett. 2014, 41, 7777–7784. [Google Scholar] [CrossRef]
- Yang, J.; Wang, D.; Huang, H.; Wu, T.; Takagi, N.; Yamamoto, K. A 3D Interferometer-Type Lightning Mapping Array for Observation of Winter Lightning in Japan. Remote Sens. 2023, 15, 1923. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Wang, D.; Dong, W.; Lyu, W.; Wu, B.; Qi, Q.; Ma, Y.; Chen, L.; Gao, Y. A Time Delay Calibration Technique for Improving Broadband Lightning Interferometer Locating. Remote Sens. 2023, 15, 2817. https://doi.org/10.3390/rs15112817
Liu H, Wang D, Dong W, Lyu W, Wu B, Qi Q, Ma Y, Chen L, Gao Y. A Time Delay Calibration Technique for Improving Broadband Lightning Interferometer Locating. Remote Sensing. 2023; 15(11):2817. https://doi.org/10.3390/rs15112817
Chicago/Turabian StyleLiu, Hengyi, Daohong Wang, Wansheng Dong, Weitao Lyu, Bin Wu, Qi Qi, Ying Ma, Lyuwen Chen, and Yan Gao. 2023. "A Time Delay Calibration Technique for Improving Broadband Lightning Interferometer Locating" Remote Sensing 15, no. 11: 2817. https://doi.org/10.3390/rs15112817
APA StyleLiu, H., Wang, D., Dong, W., Lyu, W., Wu, B., Qi, Q., Ma, Y., Chen, L., & Gao, Y. (2023). A Time Delay Calibration Technique for Improving Broadband Lightning Interferometer Locating. Remote Sensing, 15(11), 2817. https://doi.org/10.3390/rs15112817