
A Robust LiDAR SLAM Method for Underground Coal Mine Robot with Degenerated Scene Compensation

Abstract
1. Introduction
- The unknown linear equation is added to the state optimization equation as the disturbance model to detect the direction and degree of degeneration caused by insufficient line and plane feature constraints.
- The IMU pose is used to compensate for ill-conditioned components in the direction of degeneration, which cannot be determined directly by scan matching. LiDAR rotation state degeneration is compensated for by projecting IMU poses onto plane features. When degeneration is also detected in the translation direction, the compensated rotation state and IMU translation state are fused into a new LIDAR pose, which is then used for scan-to-submap matching to achieve two-step degeneration compensation.
- A tightly coupled LiDAR/IMU fusion framework is implemented based on factor graph optimization. The IMU measurements and LiDAR point cloud features are jointly optimized in a sliding window, which improves the accuracy and robustness of SLAM in the underground coal mines with the shotcrete surface and symmetric roadway environment.
2. Materials and Methods
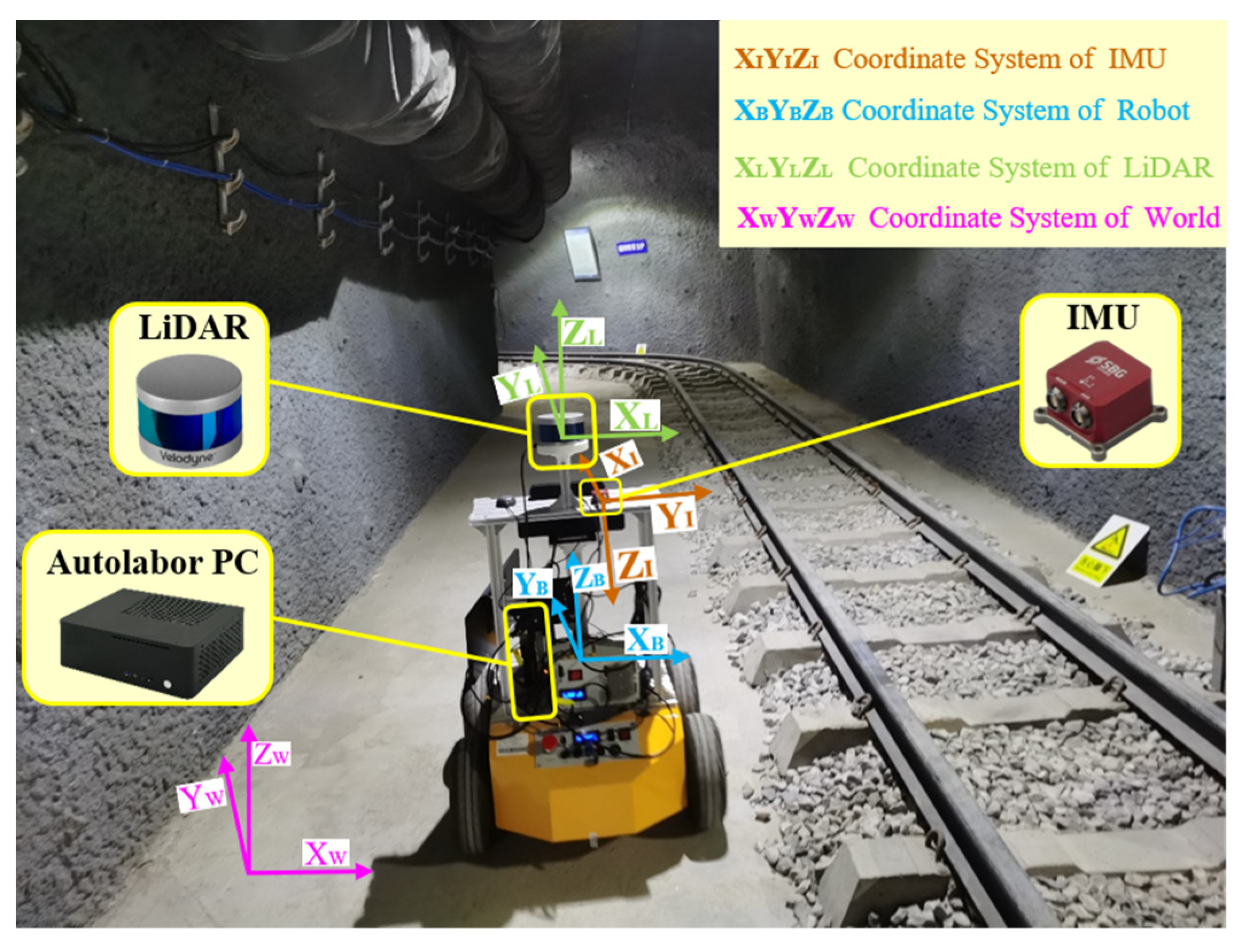
2.1. System Configuration
2.2. Method outline
2.3. Data Preprocessing
2.4. Front-End Odometry
| Algorithm 1. degeneration compensation | |
| 1: | input: , , , ; |
| 2: | output: ; |
| 3: | if < do |
| 4: | Compute , , , of , ; |
| 5: | Compute and of , based on (13) and (14); |
| 6: | Compute of and based on (15); |
| 7: | end |
| 8: | if < do |
| 9: | Construct from and based on (16); |
| 10: | Local map matching and updated ; |
| 11: | Return ; |
| 12: | end |
2.5. Factor Graph Optimization
3. Experimental Analysis
3.1. Qualitative Analysis
3.1.1. Qualitative Analysis with Indoor Corridor
3.1.2. Qualitative Analysis with the Underground Coal Mine
3.2. Quantitative Evaluation
3.3. Time Performance
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Barnewold, L.; Lottermoser, B.G. Identification of digital technologies and digitalisation trends in the mining industry. Int. J. Min. Sci. Technol. 2020, 30, 747–757. [Google Scholar] [CrossRef]
- Guofa, W. New technological progress of coal mine intelligence and its problems. Coal Sci. Technol. 2022, 50, 1–27. [Google Scholar]
- Vassena, G.; Clerici, A. Open pit mine 3D mapping by tls and digital photogrammetry: 3D model update thanks to a slam based approach. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 1145–1148. [Google Scholar] [CrossRef]
- Ebadi, K.; Chang, Y.; Palieri, M.; Stephens, A.; Hatteland, A.; Heiden, E.; Thakur, A.; Funabiki, N.; Morrell, B.; Wood, S.; et al. LAMP: Large-Scale Autonomous Mapping and Positioning for Exploration of Perceptually-Degraded Subterranean Environments. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), virtually, 31 May–31 August 2020; pp. 80–86. [Google Scholar]
- Chang, Y.; Ebadi, K.; Denniston, C.E.; Ginting, M.F.; Rosinol, A.; Reinke, A.; Palieri, M.; Shi, J.; Chatterjee, A.; Morrell, B.; et al. LAMP 2.0: A Robust Multi-Robot SLAM System for Operation in Challenging Large-Scale Underground Environments. IEEE Robot. Autom. Lett. 2022, 7, 9175–9182. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. Vins-mono: A robust and versatile monocular visual-inertial state estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, H.; Wang, P.; Nogueira, L.; Scherer, S. Super odometry: IMU-centric LiDAR-visual-inertial estimator for challenging environments. In International Conference on Intelligent Robots and Systems (IROS); IEEE: Piscataway, NI, USA, 2021; pp. 8729–8736. [Google Scholar]
- Lin, J.; Zheng, C.; Xu, W.; Zhang, F. R2LIVE: A Robust, Real-Time, LiDAR-Inertial-Visual Tightly-Coupled State Estimator and Mapping. IEEE Robot. Autom. Lett. 2021, 6, 7469–7476. [Google Scholar] [CrossRef]
- Deren, L. Towards geospatial information technology in 5G/6G era. Acta Geod. Et Cartogr. Sin. 2019, 48, 1475–1481. [Google Scholar]
- Ruizhi, C.; Lei, W.; Deren, L.; Liang, C.; Wenju, F. A survey on the fusion of the navigation and the remote sensing techniques. Acta Geod. Et Cartogr. Sin. 2019, 48, 1507–1522. [Google Scholar]
- Yongjun, Z.; Zuxun, Z.; Jianya, G. Generalized photogrammetry of spaceborne, airborne and terrestrial multi-source remote sensing datasets. Acta Geod. Et Cartogr. Sin. 2021, 50, 1–11. [Google Scholar]
- Huang, K.; Shi, B.; Li, X.; Li, X.; Huang, S.; Li, Y. Multi-modal Sensor Fusion for Auto Driving Perception: A Survey. arXiv 2022, arXiv:2202.02703. [Google Scholar]
- Zhang, J.; Singh, S. LOAM: Lidar Odometry and Mapping in Real-time. Robot. Sci. Syst. 2014, 2, 1–9. [Google Scholar]
- Shan, T.; Englot, B. LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation(ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Koide, K.; Yokozuka, M.; Oishi, S.; Banno, A. Globally Consistent and Tightly Coupled 3D LiDAR Inertial Mapping. arXiv 2022, arXiv:2202.00242. [Google Scholar]
- Xu, W.; Zhang, F. Fast-lio: A fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman filter. IEEE Robot. Autom. Lett. 2021, 6, 3317–3324. [Google Scholar] [CrossRef]
- Ye, H.; Chen, Y.; Liu, M. Tightly Coupled 3D Lidar Inertial Odometry and Mapping. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 3144–3150. [Google Scholar]
- Qin, C.; Ye, H.; Pranata, C.E.; Han, J.; Liu, M. LINS: A Lidar-Inertial State Estimator for Robust and Efficient Navigation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), virtually, 31 May–31 August 2020; pp. 8899–8906. [Google Scholar]
- Li, K.; Li, M.; Hanebeck, U.D. Towards High-Performance Solid-State-LiDAR-Inertial Odometry and Mapping. IEEE Robot. Autom. Lett. 2021, 6, 5167–5174. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Rus, D. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 5135–5142. [Google Scholar]
- Kim, H.; Choi, Y. Comparison of three location estimation methods of an autonomous driving robot for underground mines. Appl. Sci. 2020, 10, 4831. [Google Scholar] [CrossRef]
- Miller, I.D.; Cladera, F.; Cowley, A.; Shivakumar, S.S.; Lee, E.S.; Jarin-Lipschitz, L.; Bhat, A.; Rodrigues, N.; Zhou, A.; Cohen, A.; et al. Mine tunnel exploration using multiple quadrupedal robots. IEEE Robot. Autom. Lett. 2020, 5, 2840–2847. [Google Scholar] [CrossRef]
- Mascarich, F.; Khattak, S.; Papachristos, C.; Alexis, K. A multi-modal mapping unit for autonomous exploration and mapping of underground tunnels. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; pp. 1–7. [Google Scholar]
- Tian, R.; Zhang, Y.; Feng, Y.; Yang, L.; Cao, Z.; Coleman, S.; Kerr, D. Accurate and robust object SLAM with 3D quadric landmark reconstruction in outdoors. IEEE Robot. Autom. Lett. 2021, 7, 1534–1541. [Google Scholar] [CrossRef]
- Shen, B.; Chen, Y.; Yang, H.; Zhan, J.; Sun, Y.; Xiong, R.; Dai, S.; Wang, Y. Anti-degenerated UWB-LiDAR Localization for Automatic Road Roller in Tunnel. arXiv 2021, arXiv:2109.10513. [Google Scholar]
- Hongwei, M.; Yan, W.; Lin, Y. Research on depth vision based mobile robot autonomous navigation in underground coal mine. J. China Coal Soc. 2020, 45, 2193–2206. [Google Scholar]
- Johannsson, H.; Kaess, M.; Fallon, M.; Leonard, J.J. Temporally Scalable Visual SLAM using a Reduced Pose Graph. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 54–61. [Google Scholar]
- Tardioli, D.; Villarroel, J.L. Odometry-less localization in tunnel-like environments. In Proceedings of the IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Espinho, Portugal, 14–15 May 2014; pp. 65–72. [Google Scholar]
- Pathak, K.; Birk, A.; Vaškevičius, N.; Poppinga, J. Fast Registration Based on Noisy Planes With Unknown Correspondences for 3-D Mapping. IEEE Trans. Robot. 2010, 26, 424–441. [Google Scholar] [CrossRef]
- Li, R.; Qiang, L.; Gui, J.; Gu, D.; Hu, H. A novel RGB-D SLAM algorithm based on points and plane-patches. In Proceedings of the IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 October 2016; pp. 1348–1353. [Google Scholar]
- Proença, P.F.; Gao, Y. Probabilistic Combination of Noisy Points and Planes for RGB-D Odometry. Lect. Notes Comput. Sci. 2017, 10454, 340–350. [Google Scholar]
- Raposo, C.; Lourenco, M.; Antunes, M.; Barreto, J. Plane-based Odometry using an RGB-D Camera. BMVC 2013, 2, 6. [Google Scholar]
- Sun, Q.; Jing, Y.; Zhang, X.; Sun, F. RGB-D SLAM in Indoor Environments with STING-Based Plane Feature Extraction. IEEE/ASME Trans. Mechatron. 2017, 23, 1071–1082. [Google Scholar] [CrossRef]
- Taguchi, Y.; Jian, Y.D.; Ramalingam, S.; Feng, C. Point-plane SLAM for hand-held 3D sensors. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5182–5189. [Google Scholar]
- Aghili, F.; Su, C.-Y. Robust Relative Navigation by Integration of ICP and Adaptive Kalman Filter Using Laser Scanner and IMU. IEEE/ASME Trans. Mechatronics. 2016, 21, 2015–2026. [Google Scholar] [CrossRef]
- Chen, S.; Zhou, B.; Jiang, C.; Xue, W.; Li, Q. A LiDAR/Visual SLAM Backend with Loop Closure Detection and Graph Optimization. Remote Sens. 2021, 13, 2720. [Google Scholar] [CrossRef]
- Chan, S.H.; Wu, P.T.; Fu, L.C. Robust 2D Indoor Localization Through Laser SLAM and Visual SLAM Fusion. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 1263–1268. [Google Scholar]
- Ding, X.; Wang, Y.; Li, D.; Tang, L.; Yin, H.; Xiong, R. Laser map aided visual inertial localization in changing environment. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4794–4801. [Google Scholar]
- Kim, H.; Choi, Y. Location estimation of autonomous driving robot and 3D tunnel mapping in underground mines using pattern matched LiDAR sequential images. Int. J. Min. Sci. Tech. 2021, 31, 779–788. [Google Scholar] [CrossRef]
- He, X.; Gao, W.; Sheng, C.; Zhang, Z.; Pan, S.; Duan, L.; Zhang, H.; Lu, X. LiDAR-Visual-Inertial Odometry Based on Optimized Visual Point-Line Features. Remote Sens. 2022, 14, 622. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, Z.Y.; Cao, J.Y.; Shen, P.Y.; Jiang, D.Z.; Mei, L.; Zhu, G.-M.; Mian, Q.-G. Cartographer algorithm and system implementation based on enhanced pose fusion of sweeping robot. Ruan Jian Xue Bao/J. Software. 2020, 31, 2678–2690. [Google Scholar]
- Zhang, J.; Kaess, M.; Singh, S. On degeneracy of optimization-based state estimation problems. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 809–816. [Google Scholar]
- Lv, J.; Xu, J.; Hu, K.; Liu, Y.; Zuo, X. Targetless Calibration of LiDAR-IMU System Based on Continuous-time Batch Estimation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 9968–9975. [Google Scholar]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. On-Manifold Preintegration for Real-Time Visual--Inertial Odometry. IEEE Trans. Robot. 2016, 33, 1–21. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. Low-drift and Real-time Lidar Odometry and Mapping. Auton. Robot. 2017, 41, 401–416. [Google Scholar] [CrossRef]
- Kaess, M.; Johannsson, H.; Roberts, R.; Ila, V. iSAM2: Incremental smoothing and mapping using the Bayes tree. Int. J. Robot. Res. 2012, 31, 216–235. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment | Type | Specifications |
|---|---|---|
| LiDAR | VLP-16 | Scanning frequency: 10 Hz |
| Operating range: 0.2~150 m | ||
| IMU | Ellipse2-N | Output frequency: 200 Hz |
| Error: Roll/Pitch 0.1°,Yaw 0.5° | ||
| Controller | Autolabor PC | CPU: AMD Ryzen3 3200 G |
| Memory: DDR4 8 GB | ||
| Robot | Autolabor Pro1 | Driving mode:4WD Speed: 0.8 m/s |
| Applicable terrain: All terrain |
| Length | Reference | LeGO-LOAM | LIO-SAM | Proposed | LeGO-LOAM Percentage | LIO-SAM Percentage | Proposed Percentage |
|---|---|---|---|---|---|---|---|
| 38.87 | 34.95 | 38.41 | 38.68 | 10.08% | 1.18% | 0.49% | |
| 36.25 | 32.16 | 35.79 | 36.04 | 11.28% | 1.27% | 0.58% | |
| 0.0 | 0.92 | 0.20 | 0.07 | 0.61% | 0.13% | 0.05% |
| Method | X | Y | Z | Position |
|---|---|---|---|---|
| LeGO-LOAM | 0.504 | 0.533 | 0.607 | 0.952 |
| LIO-SAM | 0.197 | 0.265 | 0.172 | 0.372 |
| Proposed | 0.084 | 0.130 | 0.044 | 0.161 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Lin, X.; Yao, W.; Ma, H.; Zheng, J.; Ma, B. A Robust LiDAR SLAM Method for Underground Coal Mine Robot with Degenerated Scene Compensation. Remote Sens. 2023, 15, 186. https://doi.org/10.3390/rs15010186
Yang X, Lin X, Yao W, Ma H, Zheng J, Ma B. A Robust LiDAR SLAM Method for Underground Coal Mine Robot with Degenerated Scene Compensation. Remote Sensing. 2023; 15(1):186. https://doi.org/10.3390/rs15010186
Chicago/Turabian StyleYang, Xin, Xiaohu Lin, Wanqiang Yao, Hongwei Ma, Junliang Zheng, and Bolin Ma. 2023. "A Robust LiDAR SLAM Method for Underground Coal Mine Robot with Degenerated Scene Compensation" Remote Sensing 15, no. 1: 186. https://doi.org/10.3390/rs15010186
APA StyleYang, X., Lin, X., Yao, W., Ma, H., Zheng, J., & Ma, B. (2023). A Robust LiDAR SLAM Method for Underground Coal Mine Robot with Degenerated Scene Compensation. Remote Sensing, 15(1), 186. https://doi.org/10.3390/rs15010186