

An Epipolar HS-NCC Flow Algorithm for DSM Generation Using GaoFen-3 Stereo SAR Images


Abstract
1. Introduction
2. Methods
2.1. Epipolar Geometry
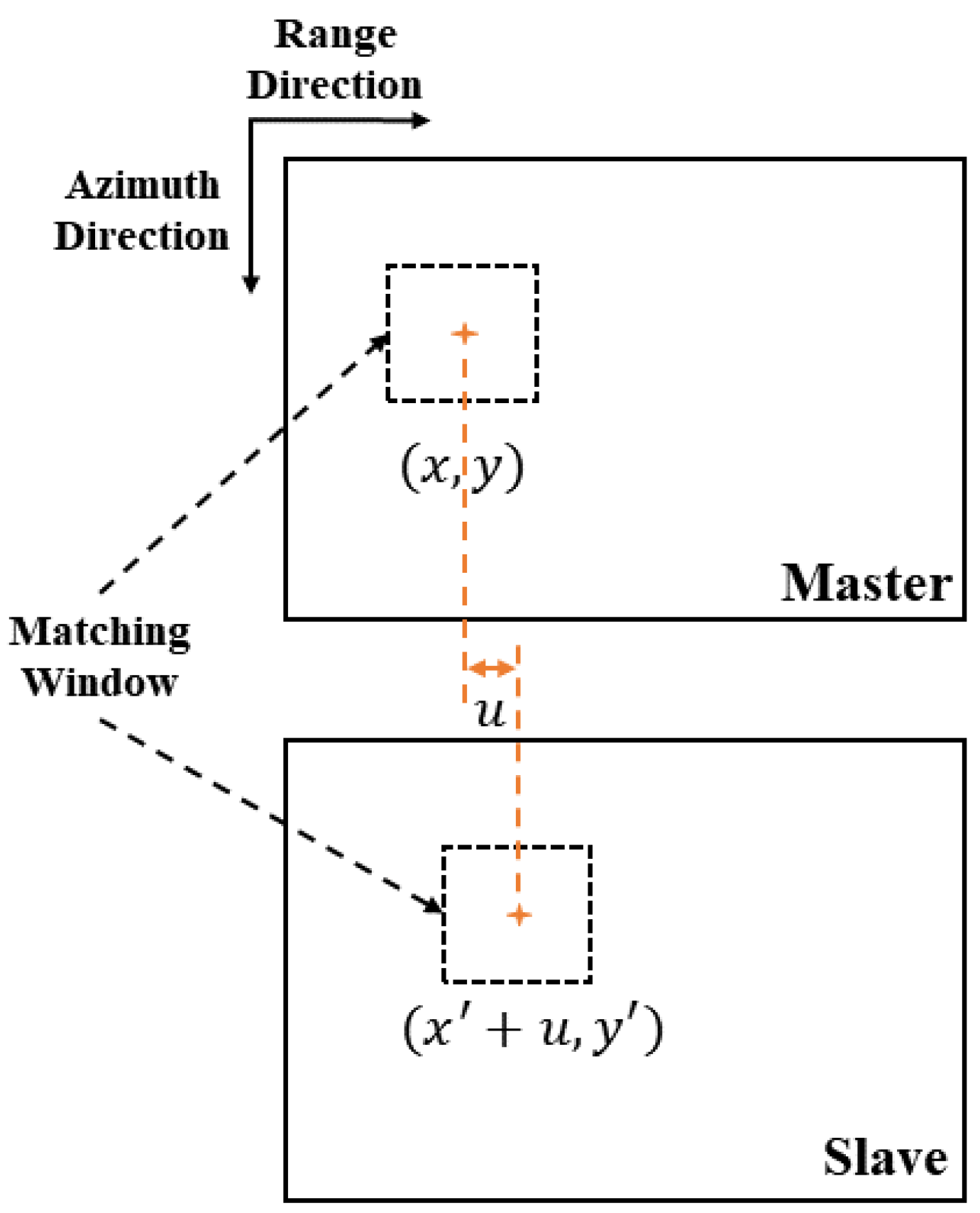
2.2. EHNF Matching Algorithm
2.3. Parameters Assessment of the EHNF Algorithm
2.4. Computation of Stereo Orientation Model
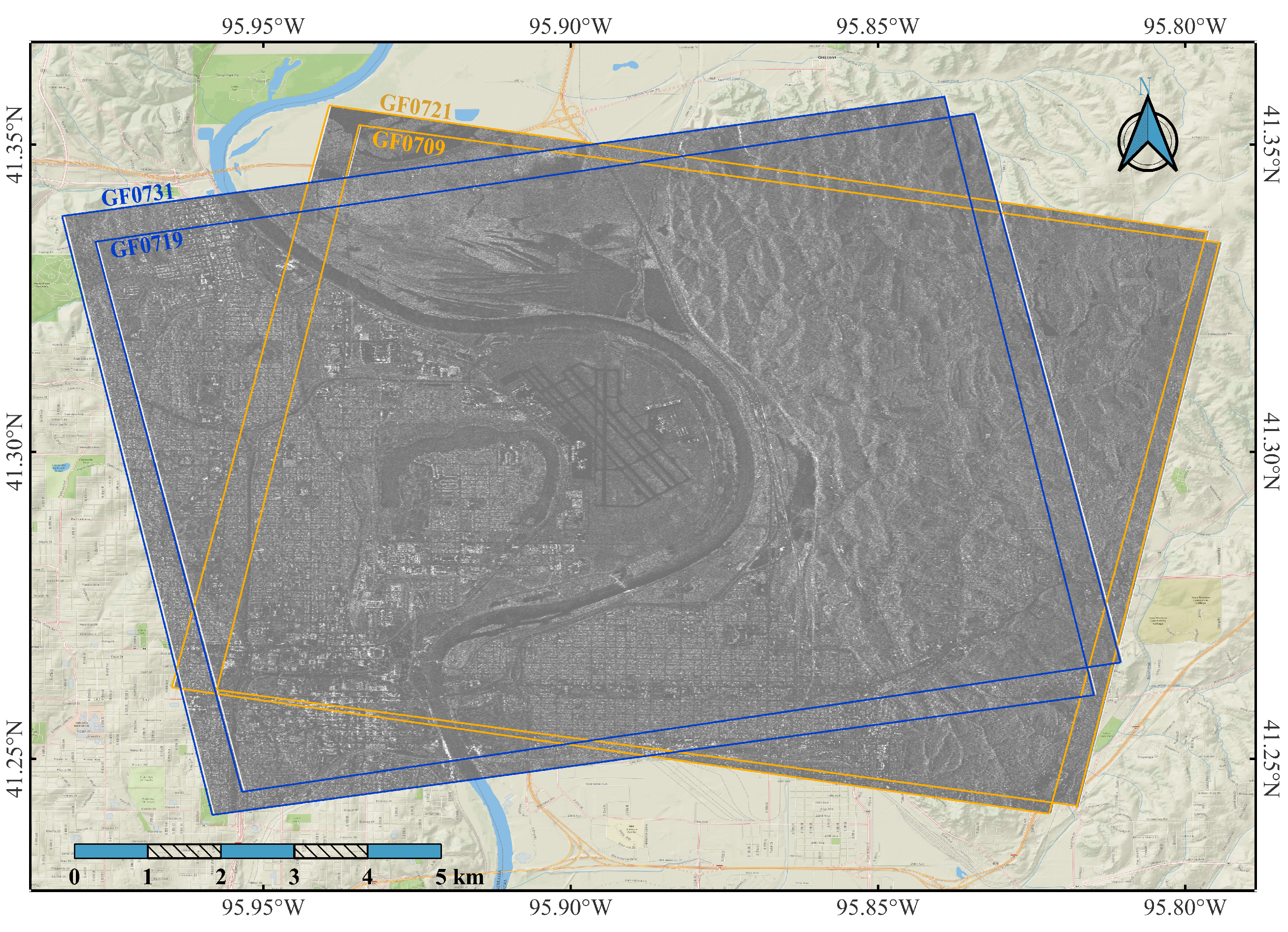
3. Materials
4. Experiments and Results
4.1. Data Preprocessing
4.2. Epipolar Geometry Processing
4.3. Parameters Values of Algorithms
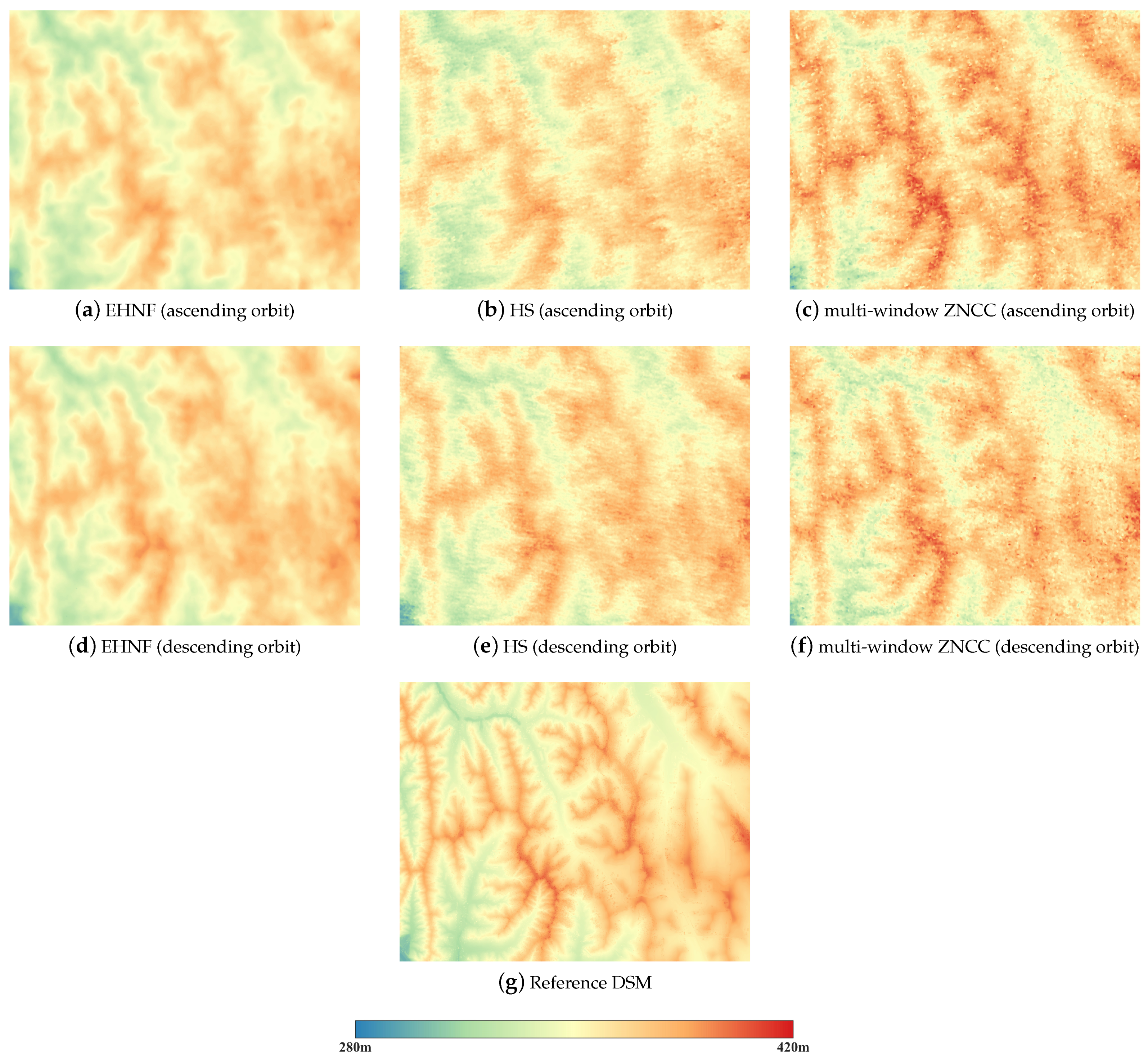
4.4. Evaluation of the Radargrammetric DSMs
5. Disscussion
5.1. Evaluation of the EHNF Algorithm
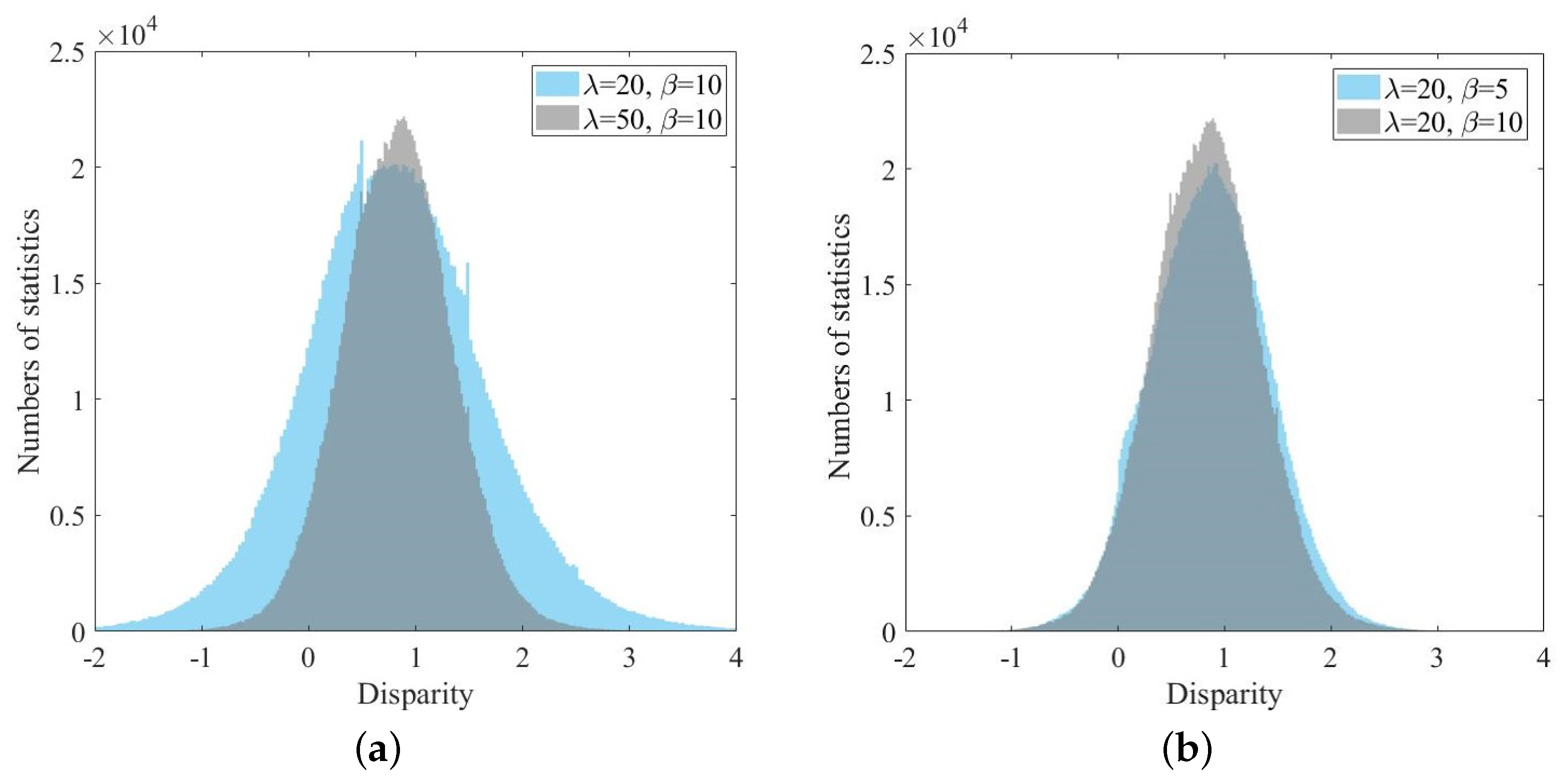
5.2. Analysis of the Impact of the EHNF Algorithm Parameters
5.3. Difference Analysis of the Stereo Images
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DSM | Digital Surface Model |
| EHNF | Epipolar HS-NCC Flow |
| NCC | Normalized Cross-Correlation |
| GF-3 | GaoFen-3 |
| SAR | Synthetic Aperture Radar |
| LiDAR | Light Detection and Ranging |
| MAE | mean absolute error |
| RMSE | Root Mean Square Error |
References
- Solberg, S.; Riegler, G.; Nonin, P. Estimating forest biomass from TerraSAR-X stripmap radargrammetry. IEEE Trans. Geosci. Remote Sens. 2014, 53, 154–161. [Google Scholar] [CrossRef]
- Feng, S.; Lin, Y.; Wang, Y.; Yang, Y.; Shen, W.; Teng, F.; Hong, W. DEM generation with a scale factor using multi-aspect SAR imagery applying radargrammetry. Remote Sens. 2020, 12, 556. [Google Scholar] [CrossRef]
- Huang, Z.; Yun, Y.; Chai, H.; Lv, X. The Iterative Extraction of the Boundary of Coherence Region and Iterative Look-Up Table for Forest Height Estimation Using Polarimetric Interferometric Synthetic Aperture Radar Data. Remote Sens. 2022, 14, 2438. [Google Scholar] [CrossRef]
- Khan, S.; Le Calvé, S.; Newport, D. A review of optical interferometry techniques for VOC detection. Sens. Actuators Phys. 2020, 302, 111782. [Google Scholar] [CrossRef]
- Toutin, T.; Gray, L. State-of-the-art of elevation extraction from satellite SAR data. ISPRS J. Photogramm. Remote Sens. 2000, 55, 13–33. [Google Scholar] [CrossRef]
- Méric, S.; Fayard, F.; Pottier, É. Radargrammetric SAR image processing. In Geoscience and Remote Sensing; ResearchGate: Berlin, Germany, 2009; pp. 421–454. [Google Scholar]
- Toutin, T.; Chenier, R. 3-D radargrammetric modeling of RADARSAT-2 ultrafine mode: Preliminary results of the geometric calibration. IEEE Geosci. Remote. Sens. Lett. 2009, 6, 282–286. [Google Scholar] [CrossRef]
- Raggam, H.; Gutjahr, K.; Perko, R.; Schardt, M. Assessment of the stereo-radargrammetric mapping potential of TerraSAR-X multibeam spotlight data. IEEE Trans. Geosci. Remote Sens. 2009, 48, 971–977. [Google Scholar] [CrossRef]
- Capaldo, P.; Crespi, M.; Fratarcangeli, F.; Nascetti, A.; Pieralice, F. High-resolution SAR radargrammetry: A first application with COSMO-SkyMed spotlight imagery. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1100–1104. [Google Scholar] [CrossRef]
- Ostrowski, J.; Cheng, P. DEM extraction from stereo SAR satellite imagery. In Proceedings of the IGARSS 2000—IEEE 2000 International Geoscience and Remote Sensing Symposium. Taking the Pulse of the Planet: The Role of Remote Sensing in Managing the Environment, Proceedings (Cat. No. 00CH37120), Honolulu, HI, USA, 24–28 July 2000; Volume 5, pp. 2176–2178. [Google Scholar]
- Capaldo, P.; Crespi, M.; Fratarcangeli, F.; Nascetti, A.; Pieralice, F. DSM generation from high resolution COSMO-SkyMed imagery with radargrammetric model. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 239–244. [Google Scholar] [CrossRef]
- Capaldo, P.; Nascetti, A.; Porfiri, M.; Pieralice, F.; Fratarcangeli, F.; Crespi, M.; Toutin, T. Evaluation and comparison of different radargrammetric approaches for Digital Surface Models generation from COSMO-SkyMed, TerraSAR-X, RADARSAT-2 imagery: Analysis of Beauport (Canada) test site. ISPRS J. Photogramm. Remote Sens. 2015, 100, 60–70. [Google Scholar] [CrossRef]
- Nascetti, A.; Capaldo, P.; Pieralice, F.; Porfiri, M.; Fratarcangeli, F.; Crespi, M. Radargrammetric digital surface models generation from high resolution satellite SAR imagery: Methodology and case studies. In VIII Hotine-Marussi Symposium on Mathematical Geodesy; Springer: Cham, Switzerland, 2015; pp. 233–240. [Google Scholar]
- Raggam, H.; Almer, A. Assessment of the potential of JERS-1 for relief mapping using optical and SAR data. Int. Arch. Photogramm. Remote Sens. 1996, 31, 671–676. [Google Scholar]
- Gutjahr, K.; Perko, R.; Raggam, H.; Schardt, M. The epipolarity constraint in stereo-radargrammetric DEM generation. IEEE Trans. Geosci. Remote Sens. 2013, 52, 5014–5022. [Google Scholar] [CrossRef]
- Cho, W.; Schenk, T.; Madani, M. Resampling digital imagery to epipolar geometry. Int. Arch. Photogramm. Remote Sens. 1993, 29, 404–408. [Google Scholar]
- Kim, T. A study on the epipolarity of linear pushbroom images. Photogramm. Eng. Remote Sens. 2000, 66, 961–966. [Google Scholar]
- Belgued, Y.; Hervet, E.; Marthon, P.; Lemaréchal, C.; Rognant, L.; Adragna, F. An accurate radargrammetric chain for DEM generation. Eur. Space-Agency-Publ.-ESA 2000, 450, 167–172. [Google Scholar]
- Pan, H.; Zhang, G.; Chen, T. A general method of generating satellite epipolar images based on RPC model. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 3015–3018. [Google Scholar]
- Curlander, J.C. Location of spaceborne SAR imagery. IEEE Trans. Geosci. Remote Sens. 1982, 359–364. [Google Scholar] [CrossRef]
- Perko, R.; Gutjahr, K.; Krüger, M.; Raggam, H.; Schardt, M. DEM-based epipolar rectification for optimized radargrammetry. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 969–972. [Google Scholar]
- Dong, Y.; Zhang, L.; Balz, T.; Luo, H.; Liao, M. Radargrammetric DSM generation in mountainous areas through adaptive-window least squares matching constrained by enhanced epipolar geometry. ISPRS J. Photogramm. Remote Sens. 2018, 137, 61–72. [Google Scholar] [CrossRef]
- Scharstein, D.; Szeliski, R. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. Int. J. Comput. Vis. 2002, 47, 7–42. [Google Scholar] [CrossRef]
- Oller, G.; Rognant, L.; Marthon, P. Correlation and similarity measures for SAR image matching. In SAR Image Analysis, Modeling, and Techniques VI; International Society for Optics and Photonics: Bellingham, DC, USA, 2004; Volume 5236, pp. 182–189. [Google Scholar]
- Liu, X.; Lei, Z.; Yu, Q.; Zhang, X.; Shang, Y.; Hou, W. Multi-modal image matching based on local frequency information. EURASIP J. Adv. Signal Process. 2013, 2013, 3. [Google Scholar] [CrossRef]
- Méric, S.; Fayard, F.; Pottier, É. A multiwindow approach for radargrammetric improvements. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3803–3810. [Google Scholar] [CrossRef]
- Hirschmuller, H. Accurate and efficient stereo processing by semi-global matching and mutual information. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–26 June 2005; Volume 2, pp. 807–814. [Google Scholar]
- Hirschmuller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Gong, K.; Balz, T.; Haala, N.; Soergel, U.; Zhang, L.; Liao, M. Radargrammetric DSM Generation by Semi-Global Matching and Evaluation of Penalty Functions. Remote Sens. 2022, 14, 1778. [Google Scholar] [CrossRef]
- Horn, B.K.; Schunck, B.G. Determining optical flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef]
- Karvonen, J. Operational SAR-based sea ice drift monitoring over the Baltic Sea. Ocean. Sci. 2012, 8, 473–483. [Google Scholar] [CrossRef]
- Xiang, Y.; Wang, F.; Wan, L.; Jiao, N.; You, H. OS-flow: A robust algorithm for dense optical and SAR image registration. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6335–6354. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The shuttle radar topography mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Dellinger, F.; Delon, J.; Gousseau, Y.; Michel, J.; Tupin, F. SAR-SIFT: A SIFT-like algorithm for SAR images. IEEE Trans. Geosci. Remote Sens. 2014, 53, 453–466. [Google Scholar] [CrossRef]
- Luo, Y.; Qiu, X.; Dong, Q.; Fu, K. A Robust Stereo Positioning Solution for Multiview Spaceborne SAR Images Based on the Range–Doppler Model. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Luo, Y.; Qiu, X.; Peng, L.; Wang, W.; Lin, B.; Ding, C. A novel solution for stereo three-dimensional localization combined with geometric semantic constraints based on spaceborne SAR data. ISPRS J. Photogramm. Remote Sens. 2022, 192, 161–174. [Google Scholar] [CrossRef]
- Guo, H. China’s Earth Observation Development. In Proceedings of the 36th International Symposium on Remote Sensing of Environment (ISRSE36), Berlin, Germany, 11–15 May 2015. [Google Scholar]
- Ding, C.; Liu, J.; Lei, B.; Qiu, X. Preliminary exploration of systematic geolocation accuracy of GF-3 SAR satellite system. J. Radars 2017, 6, 11–16. [Google Scholar]
- Jiao, N.; Wang, F.; You, H.; Qiu, X. Geolocation accuracy improvement of multiobserved GF-3 spaceborne SAR imagery. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1747–1751. [Google Scholar] [CrossRef]
- Deng, Y.k.; Zhao, F.j.; Wang, Y. Brief analysis on the development and application of spaceborne SAR. J. Radars 2012, 1, 1–10. [Google Scholar] [CrossRef]
- Zhang, K.; Lv, X.; Chai, H.; Yao, J. Unsupervised SAR Image Change Detection for Few Changed Area Based on Histogram Fitting Error Minimization. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–19. [Google Scholar] [CrossRef]
- Li, S.; Lv, X.; Ren, J.; Li, J. A Robust 3D Density Descriptor Based on Histogram of Oriented Primary Edge Structure for SAR and Optical Image Co-Registration. Remote Sens. 2022, 14, 630. [Google Scholar] [CrossRef]
- Lidar Data from USGS 3DEP. Available online: https://apps.nationalmap.gov/downloader/#/ (accessed on 18 November 2022).
- Wang, R.; Chai, H.; Guo, B.; Zhang, L.; Lv, X. A Novel DEM Block Adjustment Method for Spaceborne InSAR Using Constraint Slices. Sensors 2022, 22, 3075. [Google Scholar] [CrossRef]
- Hao, X.; Zhang, H.; Wang, Y.; Wang, J. A framework for high-precision DEM reconstruction based on the radargrammetry technique. Remote Sens. Lett. 2019, 10, 1123–1131. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Satellite | Imaging Mode | Acquisition Data | Orbit Direction | Incident Angles (°) | Resolution rg/az 1 (m) |
|---|---|---|---|---|---|---|
| GF0719 | GaoFen-3 | Spotlight (SL) | 2019-07-19 | Ascending | 25.468–26.338 | 0.5621/0.3126 |
| GF0731 | GaoFen-3 | Spotlight (SL) | 2019-07-31 | Ascending | 30.310–31.121 | 0.5621/0.3124 |
| GF0721 | GaoFen-3 | Spotlight (SL) | 2019-07-21 | Descending | 30.095–31.301 | 0.5621/0.3124 |
| GF0709 | GaoFen-3 | Spotlight (SL) | 2019-07-09 | Descending | 35.733–36.436 | 0.5621/0.3309 |
| Data | Algorithm | ||
|---|---|---|---|
| GF0719 & GF0731 | EHNF | 9.190 | 25 |
| HS | – | 7 | |
| GF0721 & GF0709 | EHNF | 1.563 | 20 |
| HS | – | 5 |
| Data | Matching Algorithm | MAE (m) | RMSE (m) |
|---|---|---|---|
| GF0719 & GF0731 | EHNF | 6.77 | 8.61 |
| HS | 7.48 | 9.53 | |
| ZNCC | 9.75 | 11.79 | |
| GF0721 & GF0709 | EHNF | 5.02 | 6.38 |
| HS | 5.55 | 7.03 | |
| ZNCC | 6.56 | 8.35 |
| Data | Matching Algorithm | MAE (m) | RMSE (m) |
|---|---|---|---|
| GF0719 and GF0731 | EHNF | 6.44 | 8.03 |
| HS | 7.05 | 8.92 | |
| ZNCC | 9.98 | 12.17 | |
| GF0721 and GF0709 | EHNF | 4.94 | 6.64 |
| HS | 5.70 | 7.59 | |
| ZNCC | 6.18 | 7.98 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Lv, X.; Huang, Z.; Fu, X. An Epipolar HS-NCC Flow Algorithm for DSM Generation Using GaoFen-3 Stereo SAR Images. Remote Sens. 2023, 15, 129. https://doi.org/10.3390/rs15010129
Wang J, Lv X, Huang Z, Fu X. An Epipolar HS-NCC Flow Algorithm for DSM Generation Using GaoFen-3 Stereo SAR Images. Remote Sensing. 2023; 15(1):129. https://doi.org/10.3390/rs15010129
Chicago/Turabian StyleWang, Jian, Xiaolei Lv, Zenghui Huang, and Xikai Fu. 2023. "An Epipolar HS-NCC Flow Algorithm for DSM Generation Using GaoFen-3 Stereo SAR Images" Remote Sensing 15, no. 1: 129. https://doi.org/10.3390/rs15010129
APA StyleWang, J., Lv, X., Huang, Z., & Fu, X. (2023). An Epipolar HS-NCC Flow Algorithm for DSM Generation Using GaoFen-3 Stereo SAR Images. Remote Sensing, 15(1), 129. https://doi.org/10.3390/rs15010129