
Assessing the Performance of the Phase Difference Bathymetric Sonar Depth Uncertainty Prediction Model

 ,
, 
Abstract
:
1. Introduction
2. Interferometric Bathymetry Undertainty Prediction Model
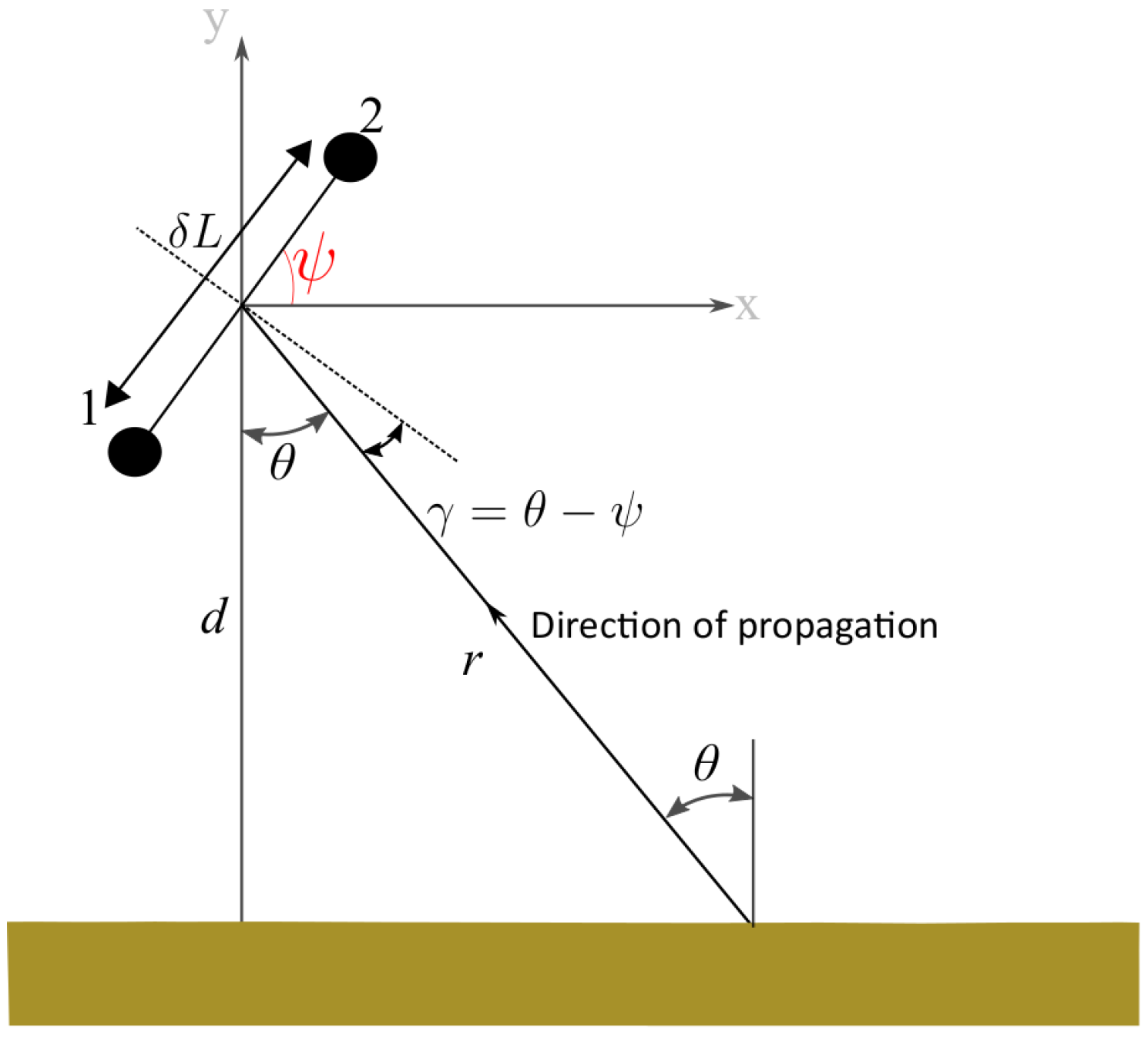
2.1. Interferometry
2.2. Bathymetry Uncertainty Prediction Model for PDBS Systems
- Interferometer contribution ;
- Angular motion sensor contribution, , due to the uncertainties in roll and pitch measurements and imperfectness of their corrections;
- Motion sensor and echosounder alignment contribution, , due to the discrepancies between roll and pitch angle measurements at the motion sensor and the PDBS transducer;
- Sound speed contribution, , due to the sound speed uncertainties at the transducer array and those in the water column. In case of not using GNSS, a measurement of the height of the water surface relative to chart datum is needed (i.e., tide height);
- Heave contribution, , due to the uncertainties in the heave measurements and those induced due to the vertical motion of the transducer with respect to the vertical reference unit caused by the angular motions of the vessel. In case of using the Global Navigation Satellite System (GNSS) for vertical positioning, the uncertainty of the heave measurements is replaced by the uncertainty of the vertical component of the GNSS.
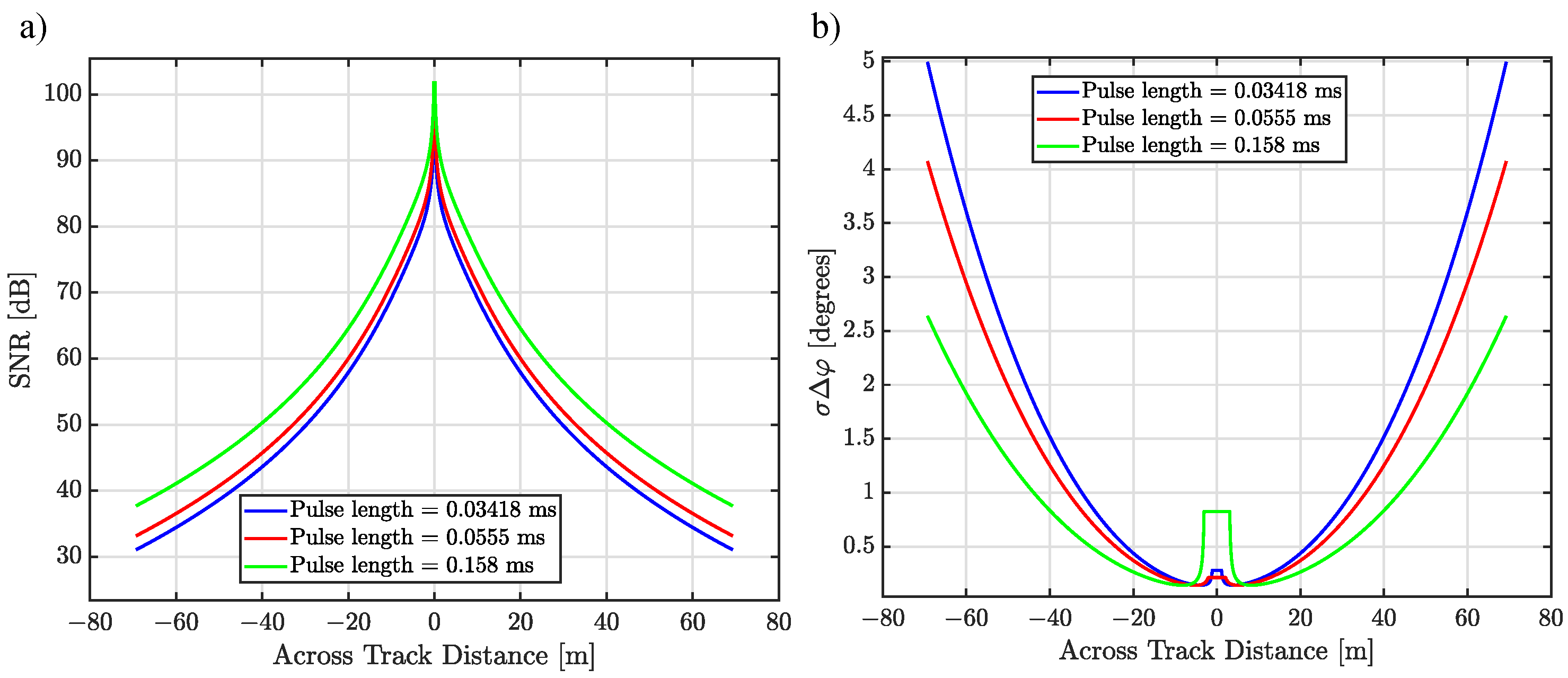
2.2.1. Additive Noise Contribution
2.2.2. Spatial Decorrelation Contribution
- A short continuous wave pulse or a short pulse compressed pulse duration for a frequency modulated signal;
- Directions away from the interferometer axis; for the situation , goes to infinity and the spatial decorrelation disappears;
- A large interferometer spacing.
2.2.3. Baseline Decorrelation Contribution
2.2.4. Overal Signal-to-Noise Ratio
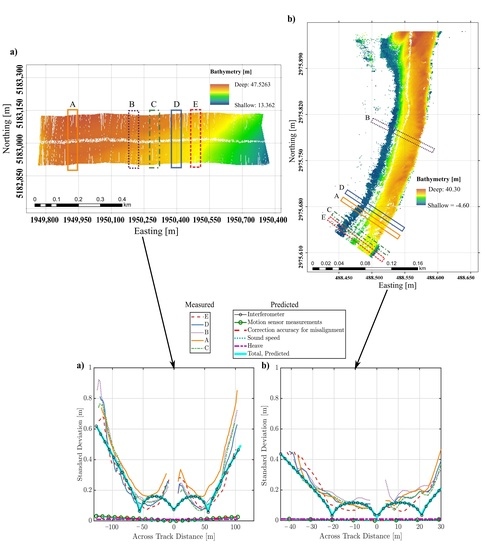
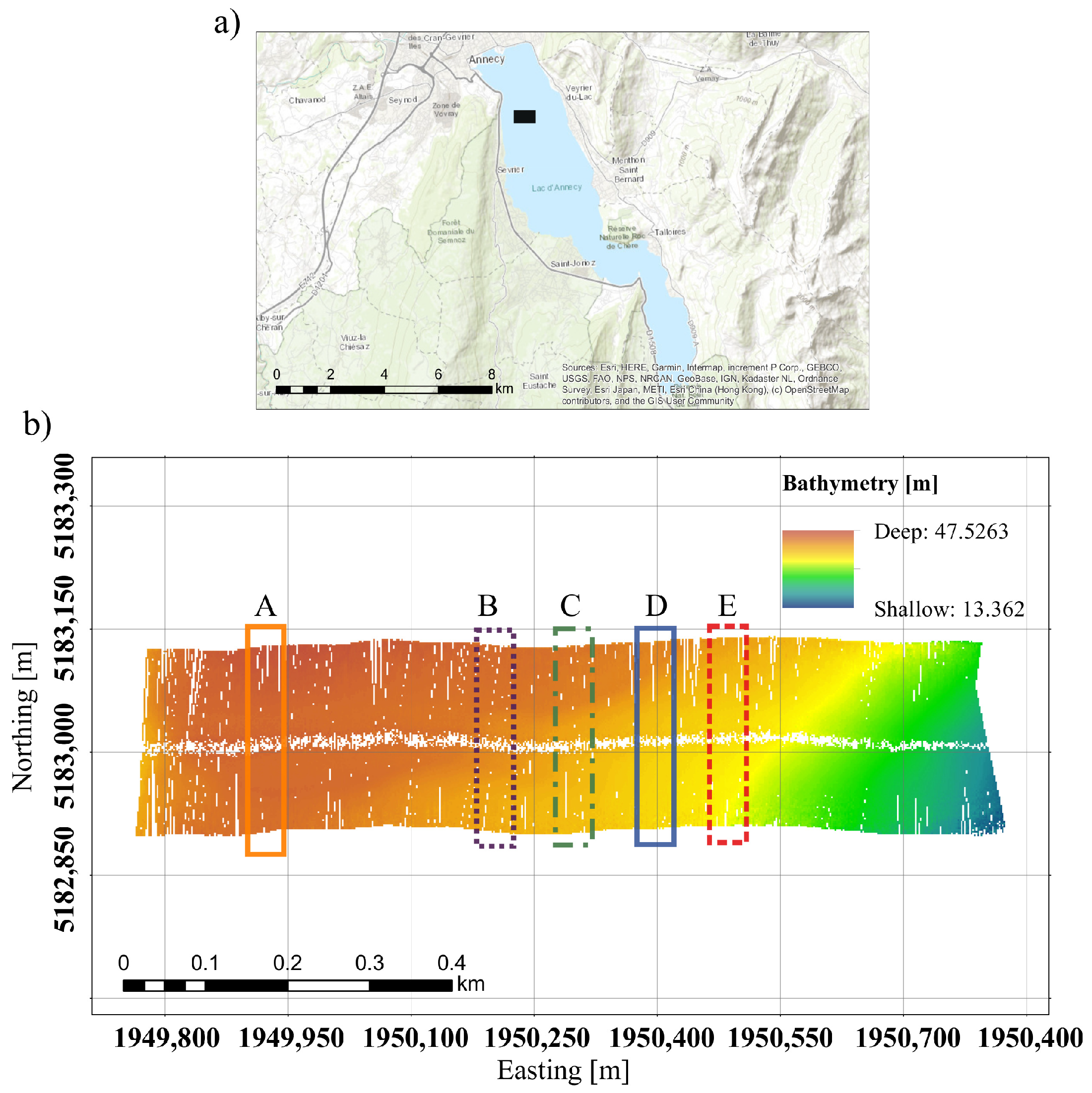
3. Description of the Data Sets
4. Results and Discussion
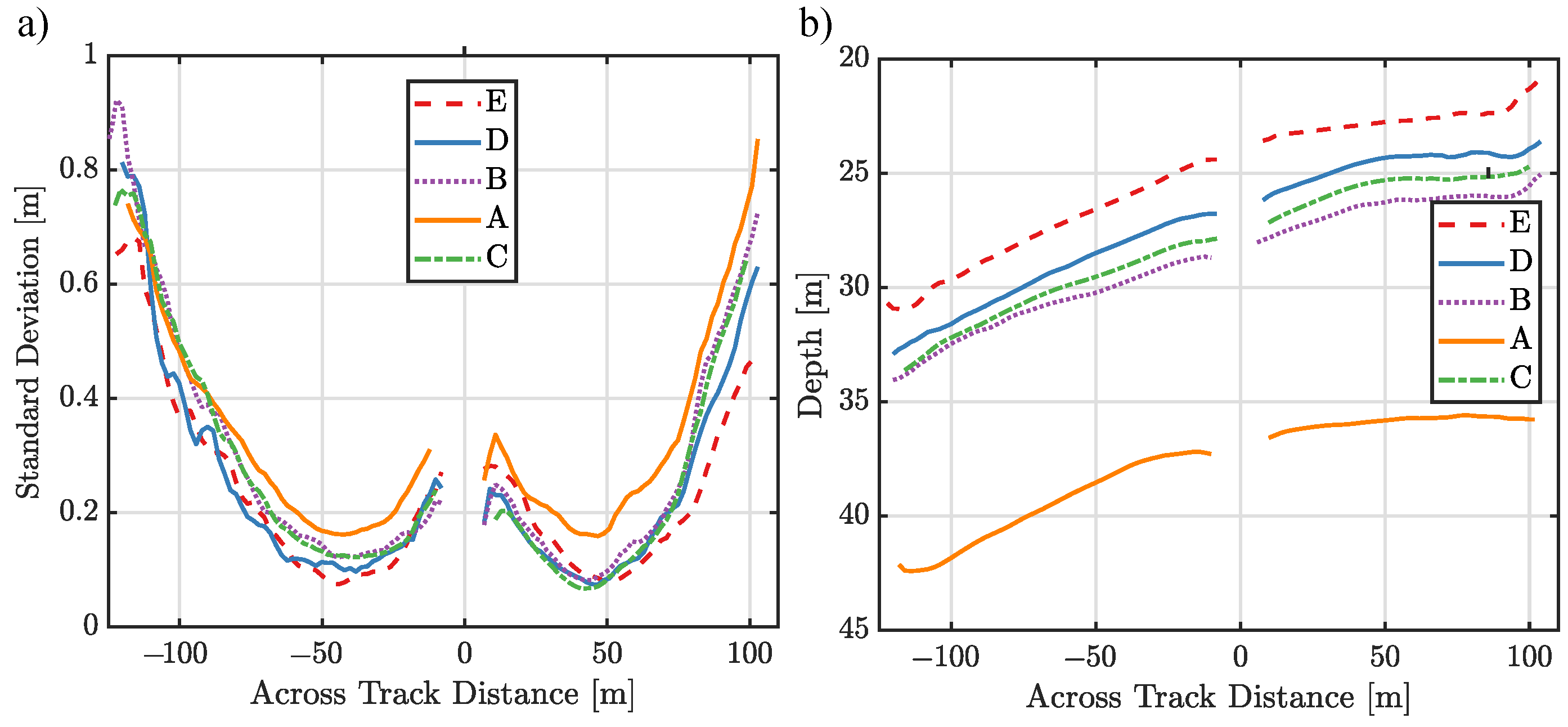
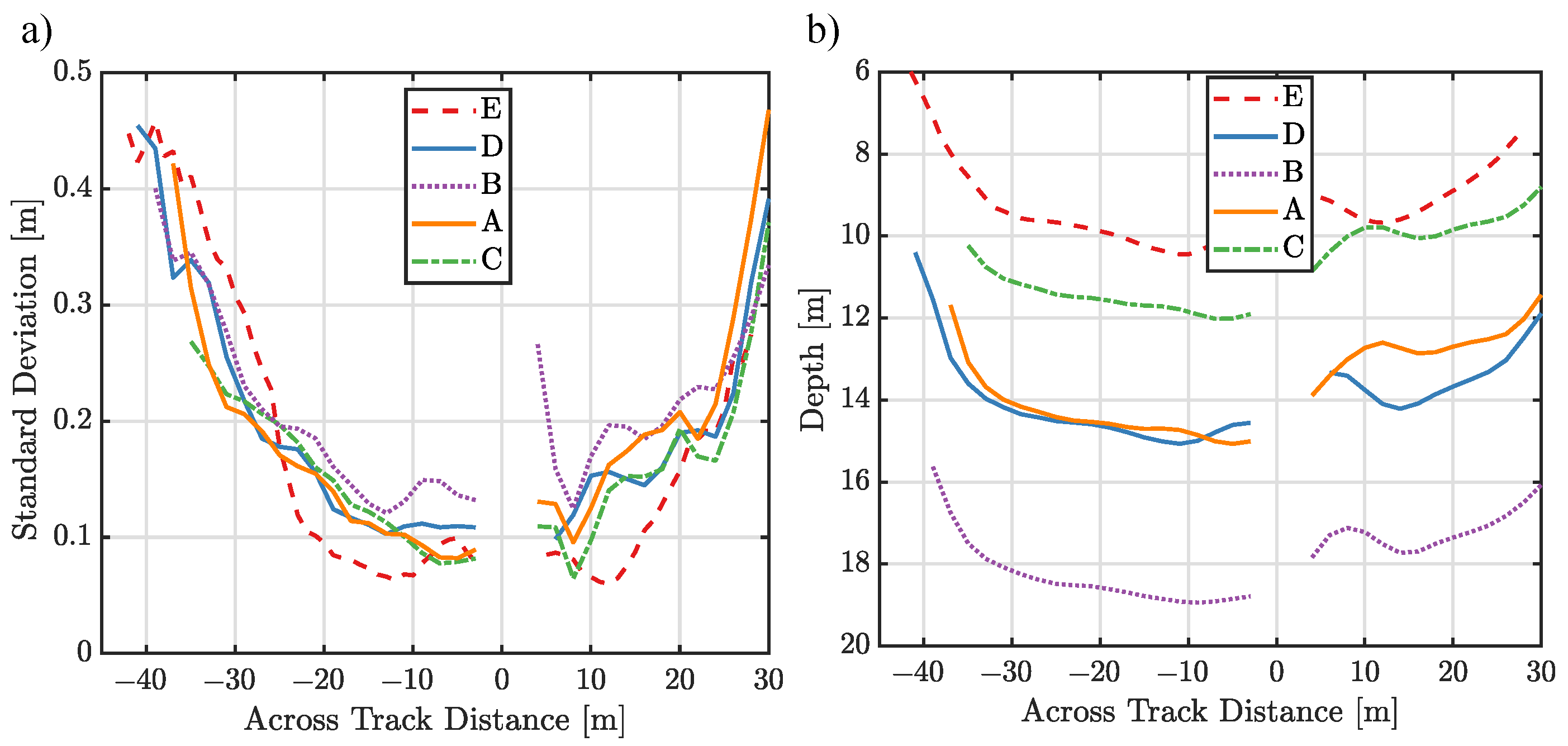
4.1. Trends Visible in Measured Bathymetric Uncertainties
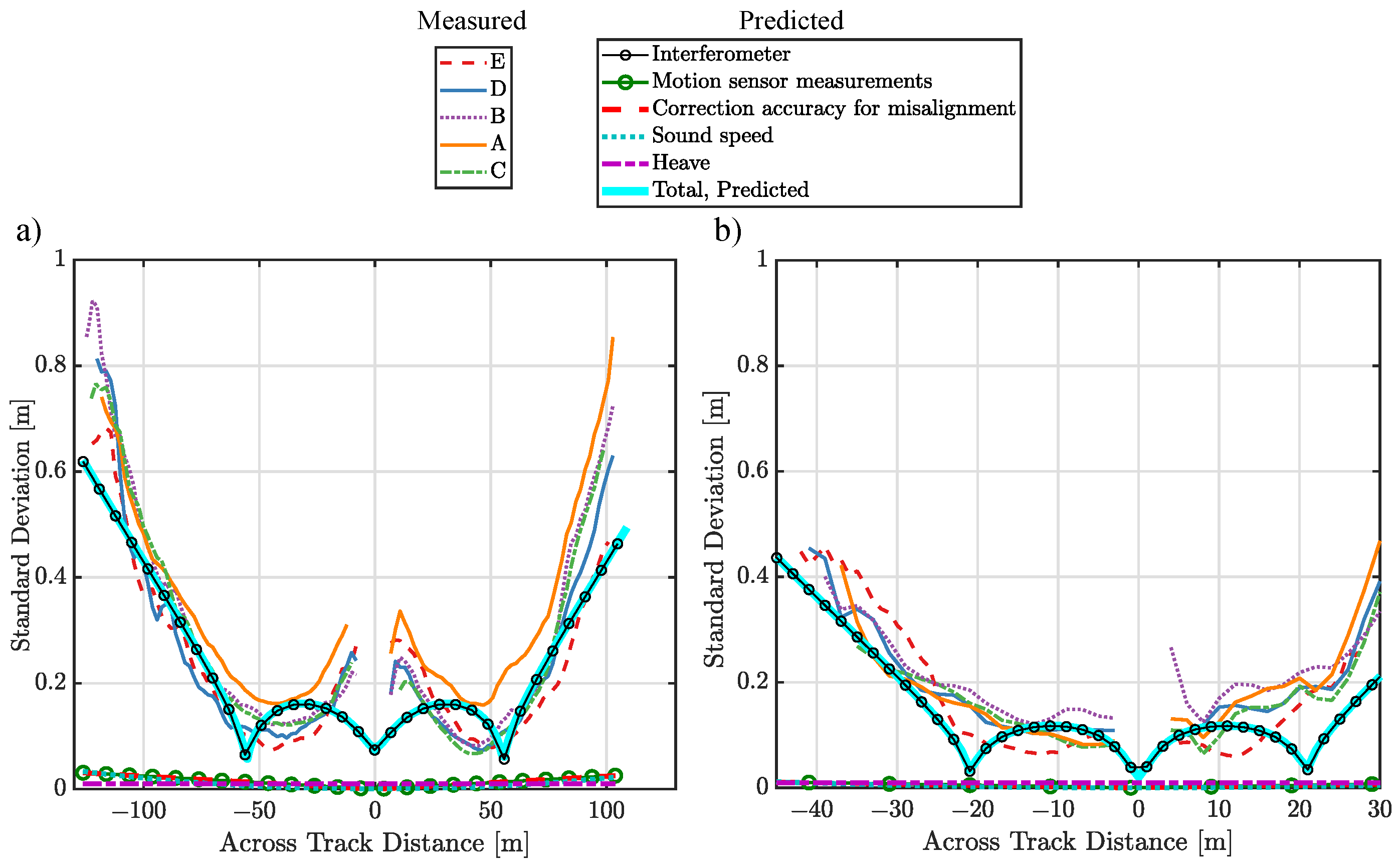
4.2. Comparing Modelled and Measured Uncertainties
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Anderson, T.J.; Syms, C.; Roberts, D.A.; Howard, D.F. Multi-scale fish-habitat associations and the use of habitat surrogates to predict the organisation and abundance of deep-water fish assemblages. J. Exp. Mar. Biol. Ecol. 2009, 379, 34–42. [Google Scholar] [CrossRef]
- Komatsu, T.; Igarashi, C.; Tatsukawa, K.; Sultana, S.; Matsuoka, Y.; Harada, S. Use of multi-beam sonar to map seagrass beds in Otsuchi Bay on the Sanriku Coast of Japan. Aquat. Living Resour. 2003, 16, 223–230. [Google Scholar] [CrossRef]
- Di Maida, G.; Tomasello, A.; Luzzu, F.; Scannavino, A.; Pirrotta, M.; Orestano, C.; Calvo, S. Discriminating between Posidonia oceanica meadows and sand substratum using multibeam sonar. ICES J. Mar. Sci. 2011, 68, 12–19. [Google Scholar] [CrossRef] [Green Version]
- Lurton, X.; Augustin, J.M. A measurement quality factor for swath bathymetry sounders. IEEE J. Ocean. Eng. 2010, 35, 852–862. [Google Scholar] [CrossRef]
- Hellequin, L.; Boucher, J.M.; Lurton, X. Processing of high-frequency multibeam echo sounder data for seafloor characterization. IEEE J. Ocean. Eng. 2003, 28, 78–89. [Google Scholar] [CrossRef] [Green Version]
- Pryor, D. Theory and test of bathymetric side scan sonar. In Proceedings of the OCEANS ’88, ’A Partnership of Marine Interests’ Proceedings, Baltimore, MD, USA, 31 October–2 November 1988; Volume 2, pp. 379–384. [Google Scholar]
- Eakins, B.W.; Taylor, L.A. Seamlessly integrating bathymetric and topographic data to support tsunami modeling and forecasting efforts. In Ocean Globe; Breman, J., Ed.; Esri Press: Redlands, CA, USA, 2010; Chapter 2; pp. 37–56. [Google Scholar]
- Hare, R.; Eakins, B.W.; Amante, C.; Taylor, L.A. Modeling bathymetric uncertainty. Int. Hydrogr. Rev. 2011, 6, 31–42. [Google Scholar]
- Hare, R. Depth and position error budgets for multibeam echosounding. Int. Hydrogr. Rev. 1995, LXXII, 37–69. [Google Scholar]
- Hare, R. Error Budget Analysis for US Naval Oceanographic Office (NAVOCEANO) Hydrographic Survey Systems; Technical Report; Hydrographic Science Research Center (HSRC): Mississippi, MS, USA, 2001. [Google Scholar]
- Mohammadloo, T.H.; Snellen, M.; Simons, D.G. Multi-beam echo-sounder bathymetric measurements: Implications of using frequency modulated pulses. J. Acoust. Soc. Am. 2018, 144, 842–860. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mohammadloo, T.H.; Snellen, M.; Amiri-Simkooei, A.; Simons, D.G. Comparing modeled and measured bathymetric uncertainties: Effect of Doppler and baseline decorrelation. In Proceedings of the OCEANS 2019, Marseille, France, 17–20 June 2019; pp. 1–8. [Google Scholar]
- Mohammadloo, T.H.; Snellen, M.; Simons, D.G. Assessing the Performance of the Multi-Beam Echo-Sounder Bathymetric Uncertainty Prediction Model. Appl. Sci. 2020, 10, 4671. [Google Scholar] [CrossRef]
- Lurton, X. Swath bathymetry using phase difference: Theoretical analysis of acoustical measurement precision. IEEE J. Ocean. Eng. 2000, 25, 351–363. [Google Scholar] [CrossRef]
- Grall, P.; Kochanska, I.; Marszal, J. Direction-of-Arrival Estimation Methods in Interferometric Echo Sounding. Sensors 2020, 20, 3556. [Google Scholar] [CrossRef] [PubMed]
- Sewada, J.S. Contribution to the Development of Wideband Signal Processing Techniques for New Sonar Technologies. Ph.D. Thesis, Université Grenoble Alpes, Grenoble, France, 2020. [Google Scholar]
- ITER Systems. Bathyswath-2 Technical Information; Technical Report; ITER Systems: Auvergne-Rhone-Alpes, France, 2020. [Google Scholar]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Burdic, W.S. Underwater Acoustic System Analysis, 2nd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Denbigh, P.N. Swath bathymetry: Principles of operation and an analysis of errors. IEEE J. Ocean. Eng. 1989, 14, 289–298. [Google Scholar] [CrossRef]
- Denbigh, P.N. Signal processing strategies for a bathymetric sidescan sonar. IEEE J. Ocean. Eng. 1994, 19, 382–390. [Google Scholar] [CrossRef]
- Sintes, C.; Solaiman, B. Strategies for unwrapping multisensors interferometric side scan sonar phase. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition. Conference Proceedings (Cat. No.00CH37158), Providence, RI, USA, 11–14 September 2000; Volume 3, pp. 2059–2065. [Google Scholar]
- Llort-Pujol, G.; Sintes, C.; Gueriot, D. Analysis of Vernier interferometers for sonar bathymetry. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–5. [Google Scholar]
- Sintes, C.; Llort-Pujol, G.; Le Caillec, J.M. Vernier interferometer performance analysis. In Proceedings of the OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–6. [Google Scholar]
- Mohammadloo, T.H.; Snellen, M.; Amiri-Simkooei, A.; Simons, D.G. Assessment of reliability of multi-beam echo-sounder bathymetric uncertainty prediction models. In Proceedings of the 5th Underwater Acoustics Conference and Exhibition, Heraklion, Greece, 30 June–5 July 2019; pp. 783–790. [Google Scholar]
- Chen, Y.; Zhou, L.; Guo, X.; He, T.; Zhang, J. Modelling, measurement and optimization of self-noise of hydrophone with preamplifier. In MATEC Web of Conferences; EDP Sciences: Le Mans, France, 2019; Volume 283, p. 05004. [Google Scholar]
- Lurton, X. Theoretical modelling of acoustical measurement accuracy for swath bathymetric sonars. Int. Hydrogr. Rev. 2003, 4, 17–30. [Google Scholar]
- Urick, R.G. Principles of Underwater Sound, 3rd ed.; Peninsula Publishing: New York, NY, USA, 1983. [Google Scholar]
- Zhang, X.; Ying, W.; Yang, P.; Sun, M. Parameter estimation of underwater impulsive noise with the Class B model. IET Radar Sonar Navig. 2020, 14, 1055–1060. [Google Scholar] [CrossRef]
- Waite, A.D. Sonar for Practising Engineers, 3rd ed.; John Wiley & Sons: New York, NY, USA, 2002; Chapter 2; pp. 83–101. [Google Scholar]
- Worthing, A.G. On the Deviation from Lambert’s Cosine Law of the Emission from Tungsten and Carbon at Glowing Temperatures. Astrophys. J. 1912, 36, 345. [Google Scholar] [CrossRef]
- Jin, G.L.; Tang, D.J. Uncertainties of differential phase estimation associated with interferometric sonars. IEEE J. Ocean. Eng. 1996, 21, 53–63. [Google Scholar]
- Vincent, P. Modulated Signal Impact on Multibeam Echosounder Bathymetry. Ph.D. Thesis, Télécom Bretagne Sous En Habilitation Conjointe avec ĺuniversité de Rennes 1, Rennes, France, 2013. [Google Scholar]
- National Oceanic and Atmospheric Administration. Hydrographic Survey Specifications and Deliverables; Technical Report; National Oceanic and Atmospheric Administration: Washington, DC, USA, 2018.
- Valeport. miniSVP—Sound Velocity Profiler. Available online: https://www.valeport.co.uk/content/uploads/2020/04/miniSVP-Datasheet-April-2020.pdf (accessed on 20 March 2020).
- Slobbe, D.C.; Klees, R.; Verlaan, M.; Dorst, L.L.; Gerritsen, H. Lowest astronomical tide in the North Sea derived from a vertically referenced shallow water model, and an assessment of its suggested sense of safety. Mar. Geod. 2013, 36, 31–71. [Google Scholar] [CrossRef]
- Slobbe, D.C.; Klees, R.; Gunter, B.C. Realization of a consistent set of vertical reference surfaces in coastal areas. J. Geod. 2014, 88, 601–615. [Google Scholar] [CrossRef]
- QPS. How to Height, Tide and RTK. Available online: https://confluence.qps.nl/qinsy/9.0/en/how-to-height-tide-and-rtk-128680602.html (accessed on 20 March 2020).
- SBG Systems. Ekinox Series: Tactical Grade MEMS Inertial Systems. Available online: https://www.sbg-systems.com/wp-content/uploads/Ekinox_Series_Leaflet.pdf (accessed on 7 January 2022).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Source Level | [dB re 1 at 1 ] |
| Pulse Shape | Continuous Wave |
| Noise level | [dB] |
| Frequency (f) | 234 [] |
| Bandwidth (B) | 100 [] |
| Interferometer Tilt Angle () | |
| Depth | 10 [] |
| Absorption Coefficient | 17 dB/ |
| Backscatter strength at nadir for fine sand |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammadloo, T.H.; Geen, M.; S. Sewada, J.; Snellen, M.; G. Simons, D. Assessing the Performance of the Phase Difference Bathymetric Sonar Depth Uncertainty Prediction Model. Remote Sens. 2022, 14, 2011. https://doi.org/10.3390/rs14092011
Mohammadloo TH, Geen M, S. Sewada J, Snellen M, G. Simons D. Assessing the Performance of the Phase Difference Bathymetric Sonar Depth Uncertainty Prediction Model. Remote Sensing. 2022; 14(9):2011. https://doi.org/10.3390/rs14092011
Chicago/Turabian StyleMohammadloo, Tannaz H., Matt Geen, Jitendra S. Sewada, Mirjam Snellen, and Dick G. Simons. 2022. "Assessing the Performance of the Phase Difference Bathymetric Sonar Depth Uncertainty Prediction Model" Remote Sensing 14, no. 9: 2011. https://doi.org/10.3390/rs14092011
APA StyleMohammadloo, T. H., Geen, M., S. Sewada, J., Snellen, M., & G. Simons, D. (2022). Assessing the Performance of the Phase Difference Bathymetric Sonar Depth Uncertainty Prediction Model. Remote Sensing, 14(9), 2011. https://doi.org/10.3390/rs14092011