
How High to Fly? Mapping Evapotranspiration from Remotely Piloted Aircrafts at Different Elevations

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Site Description
2.2. Drone Missions and Data Processing
2.3. Thermal Ground Reference
2.4. Crop Phenology
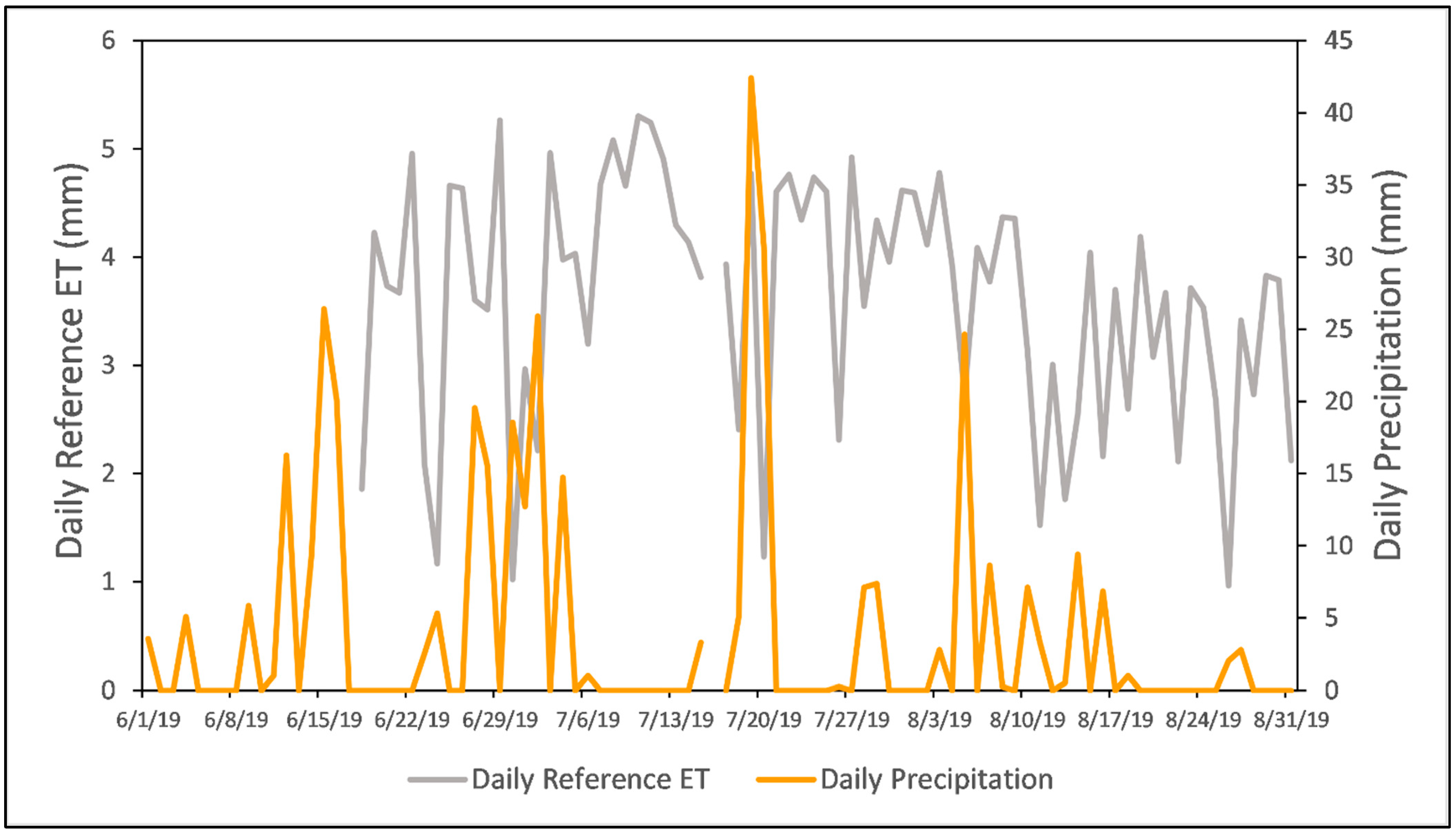
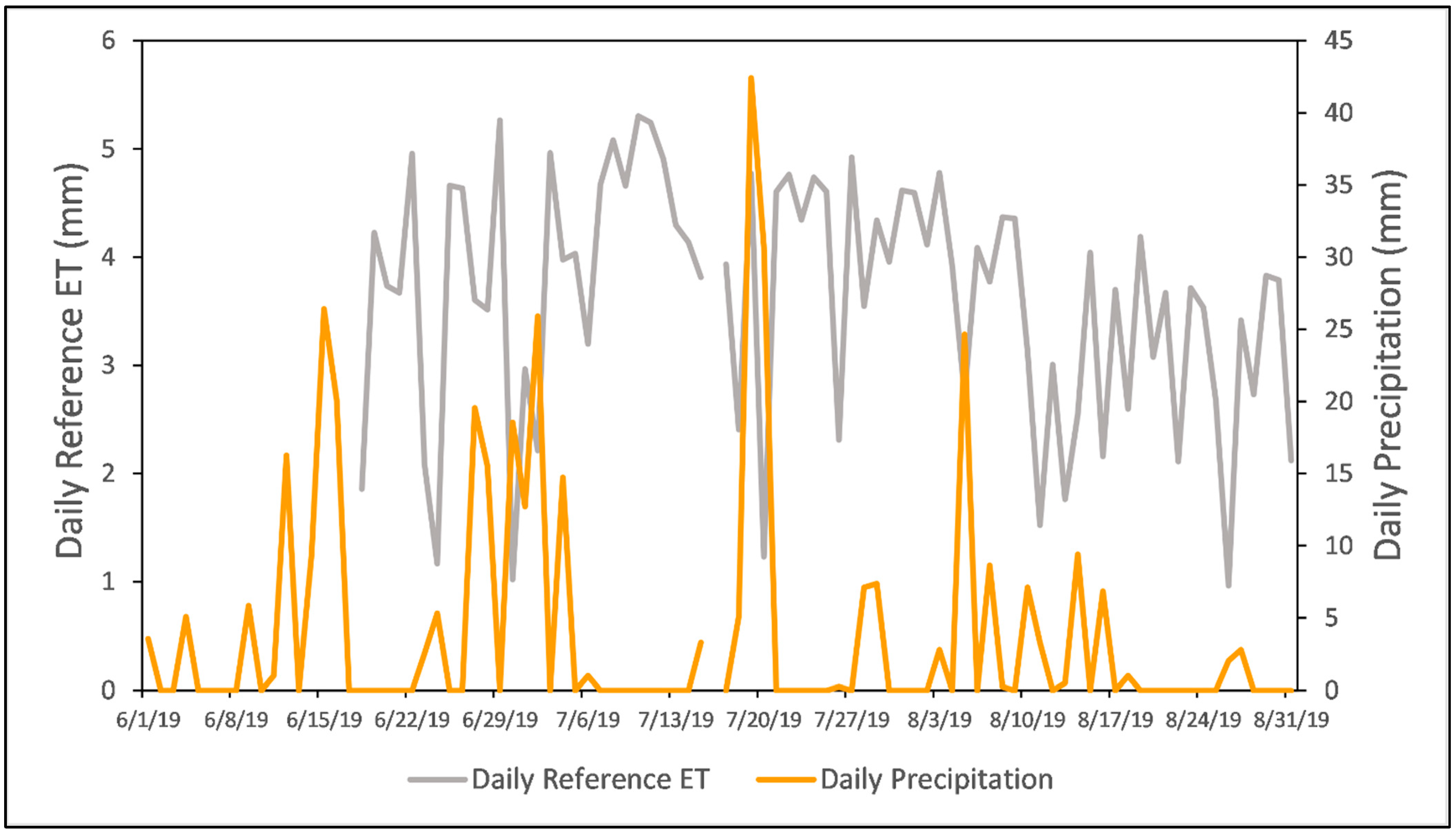
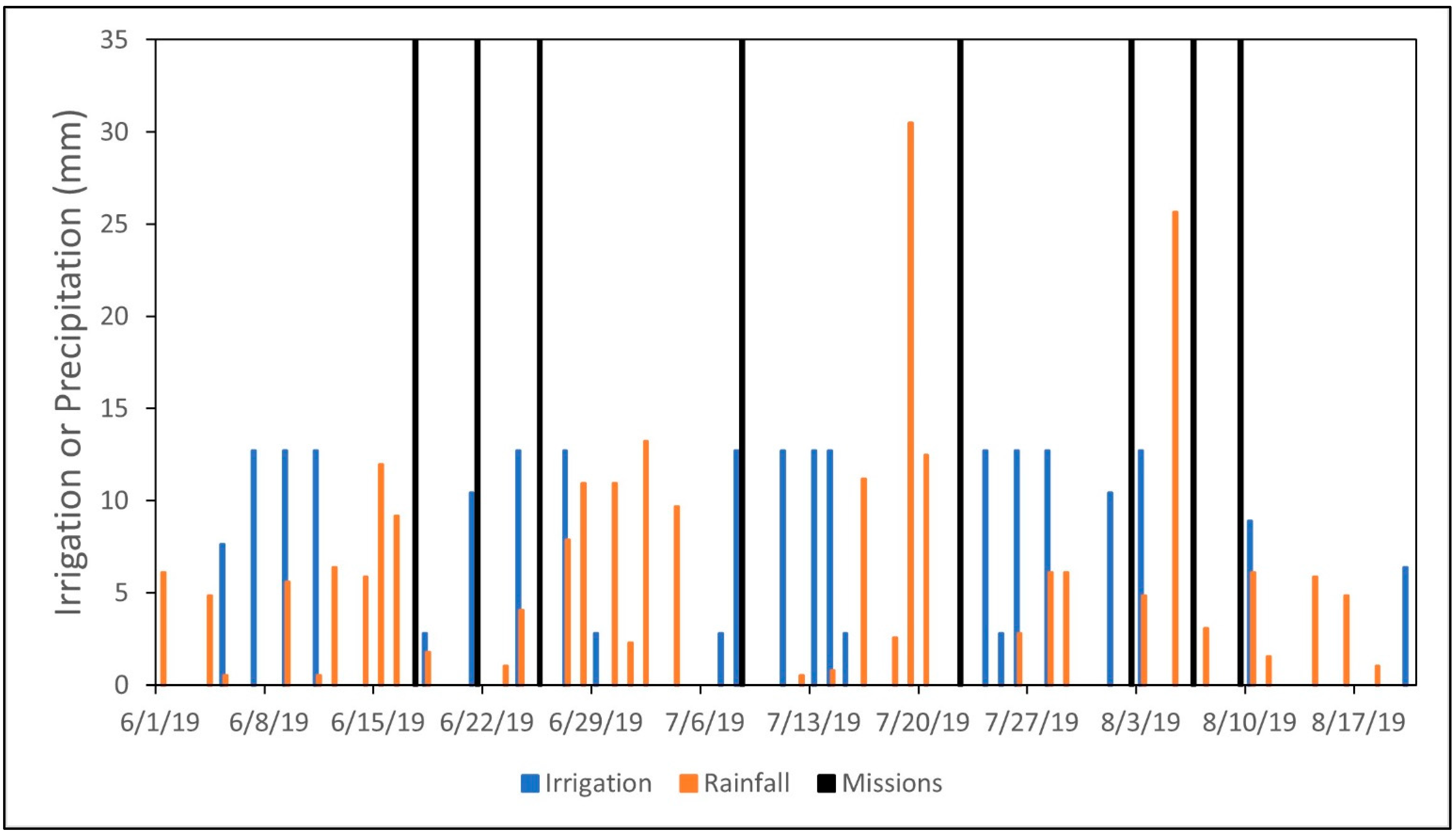
2.5. Meteorological Data Collection
2.6. Remotely Sensed Maps of ET and Uncertainty Estimation
2.7. Eddy Covariance
3. Results
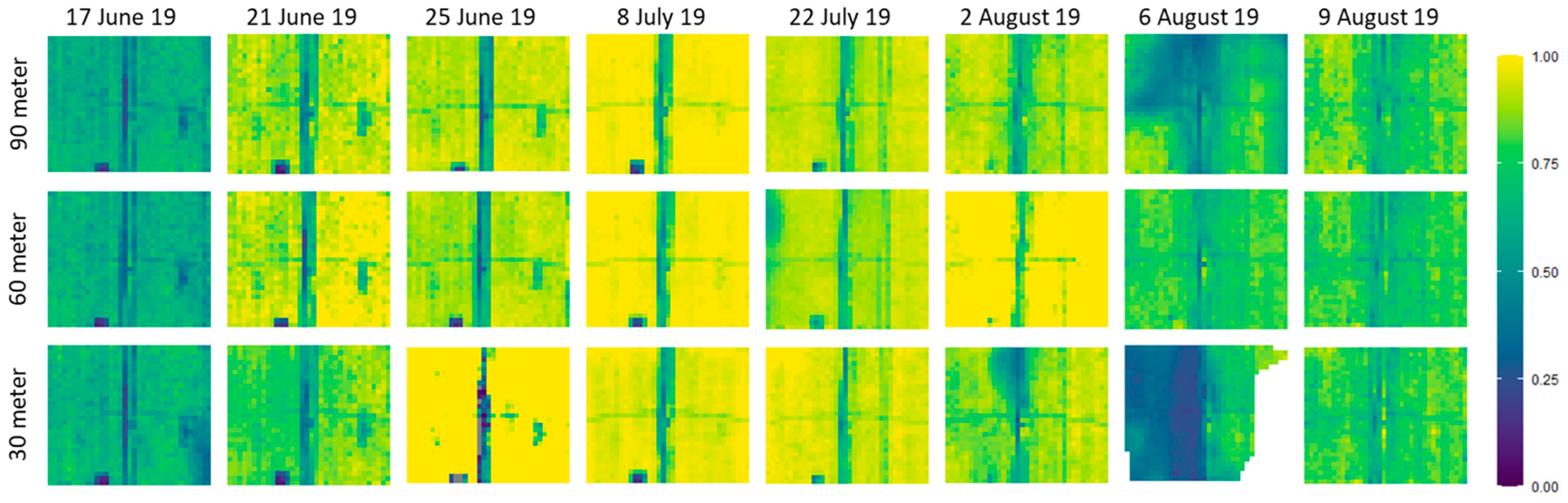
3.1. Spatial Features
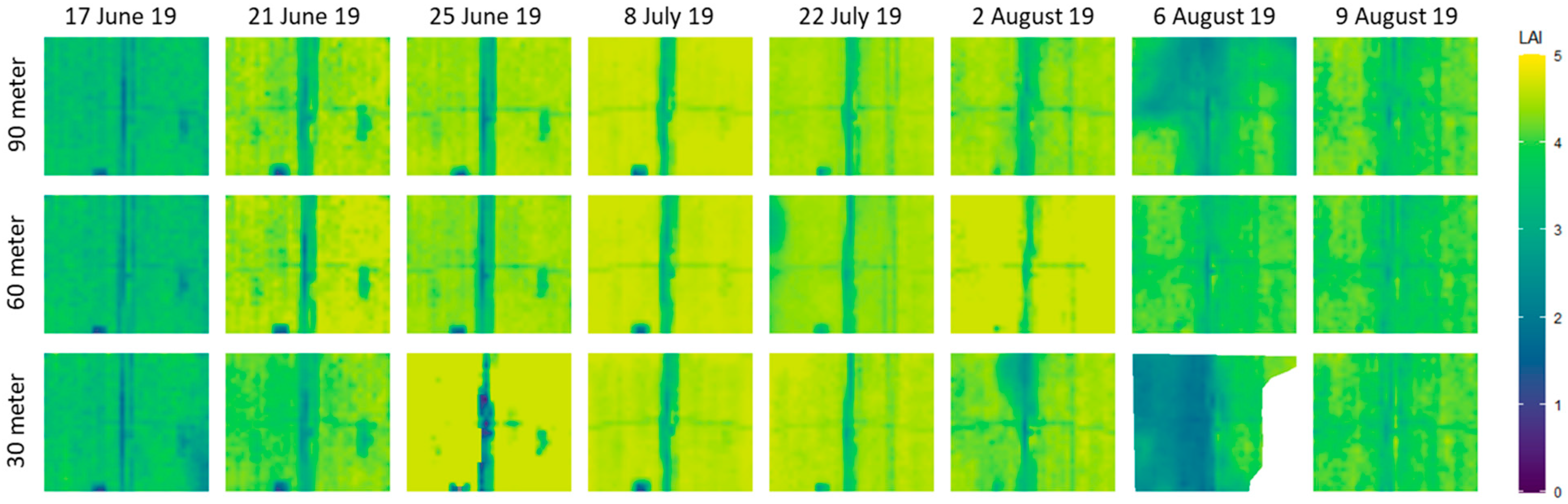
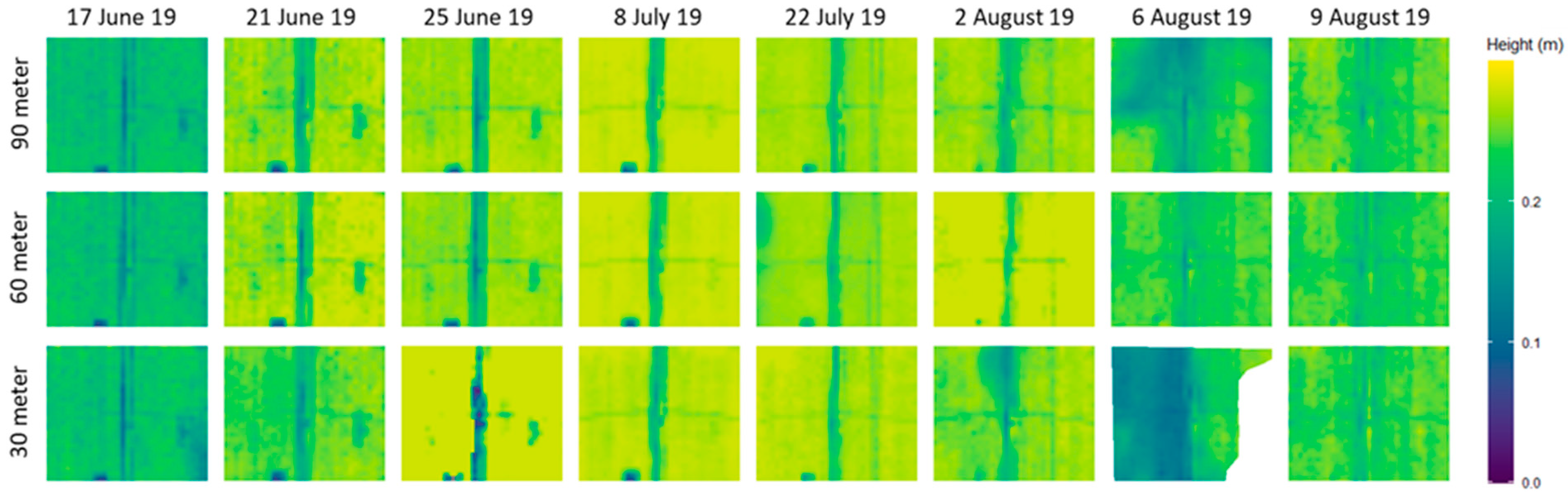
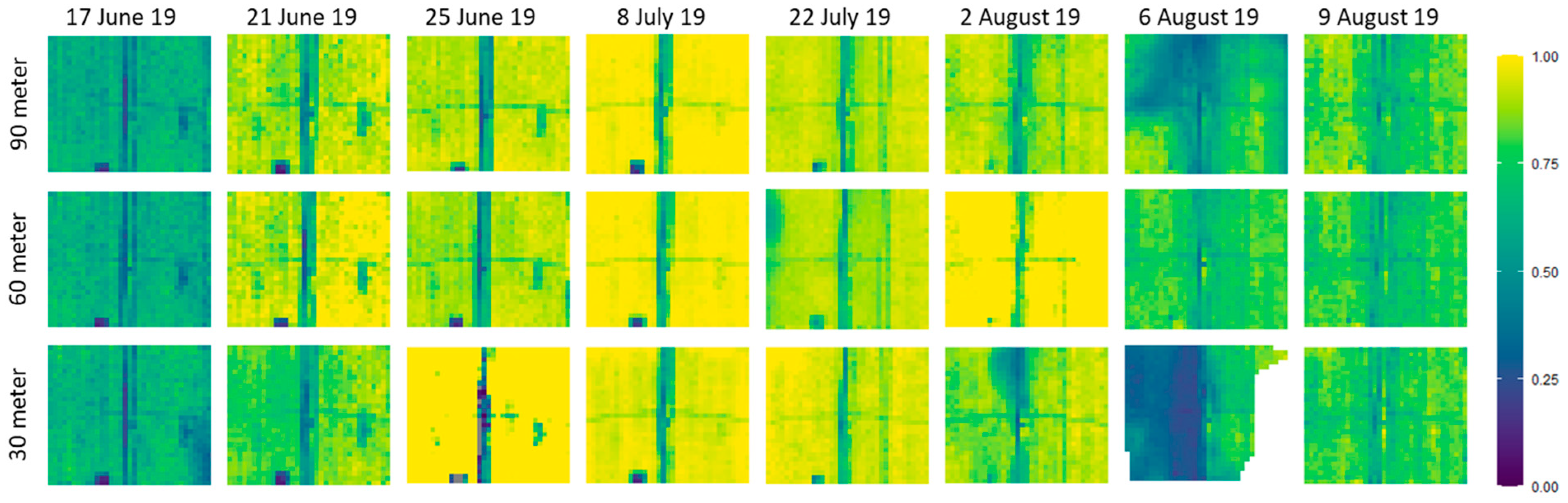
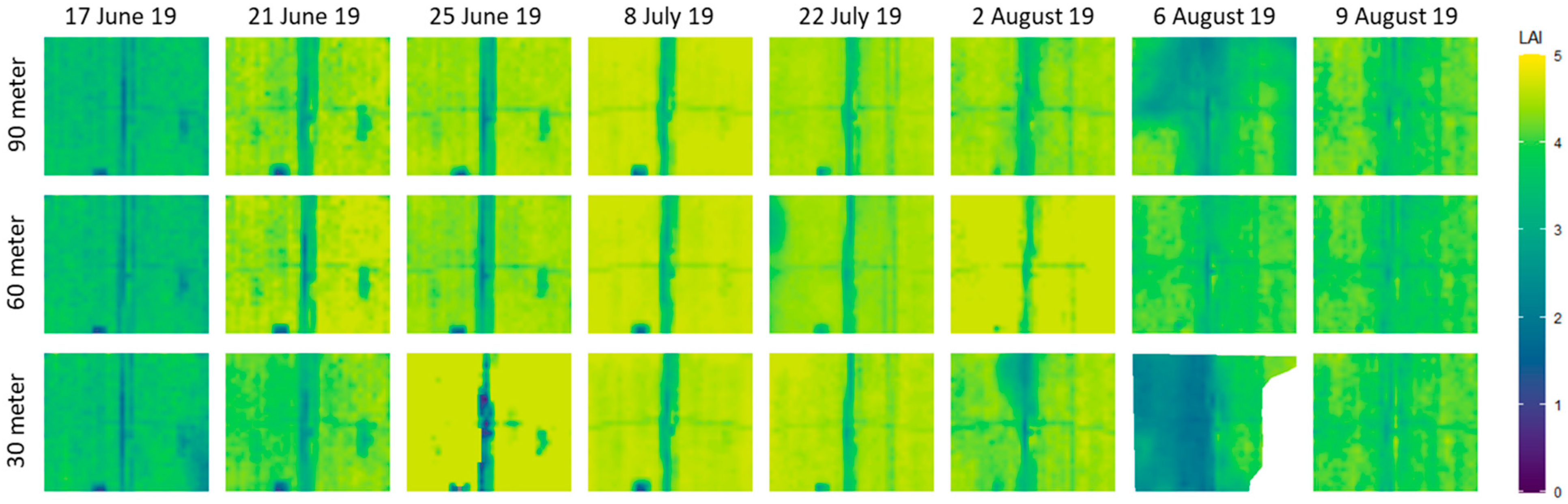
3.2. EVI, Height and LAI
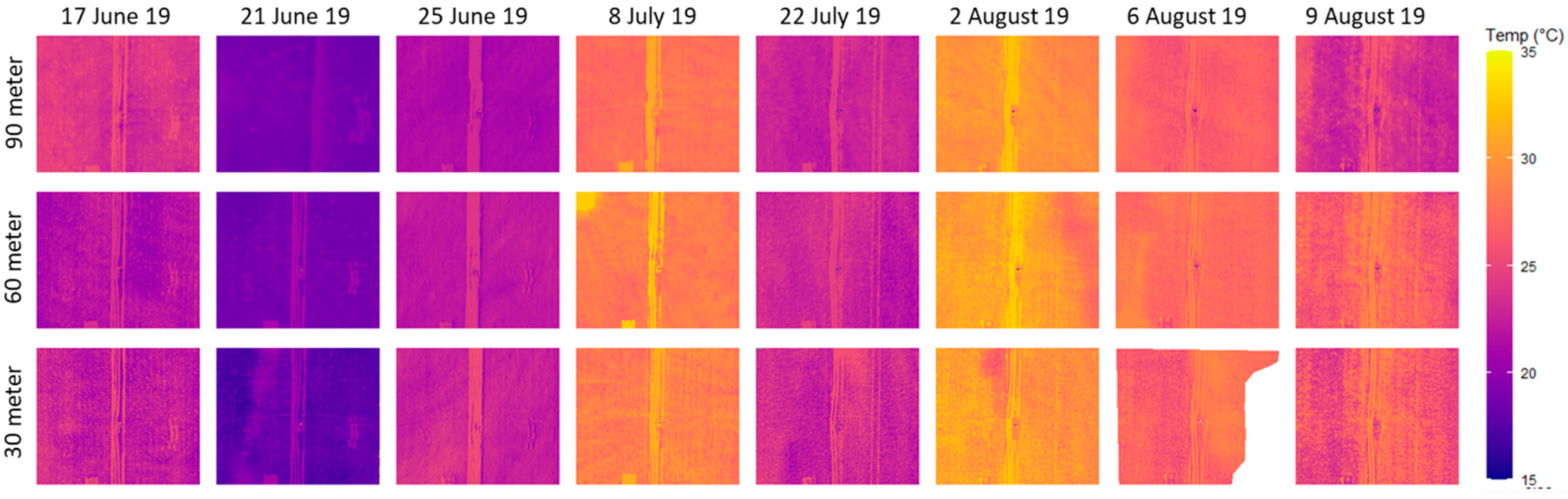
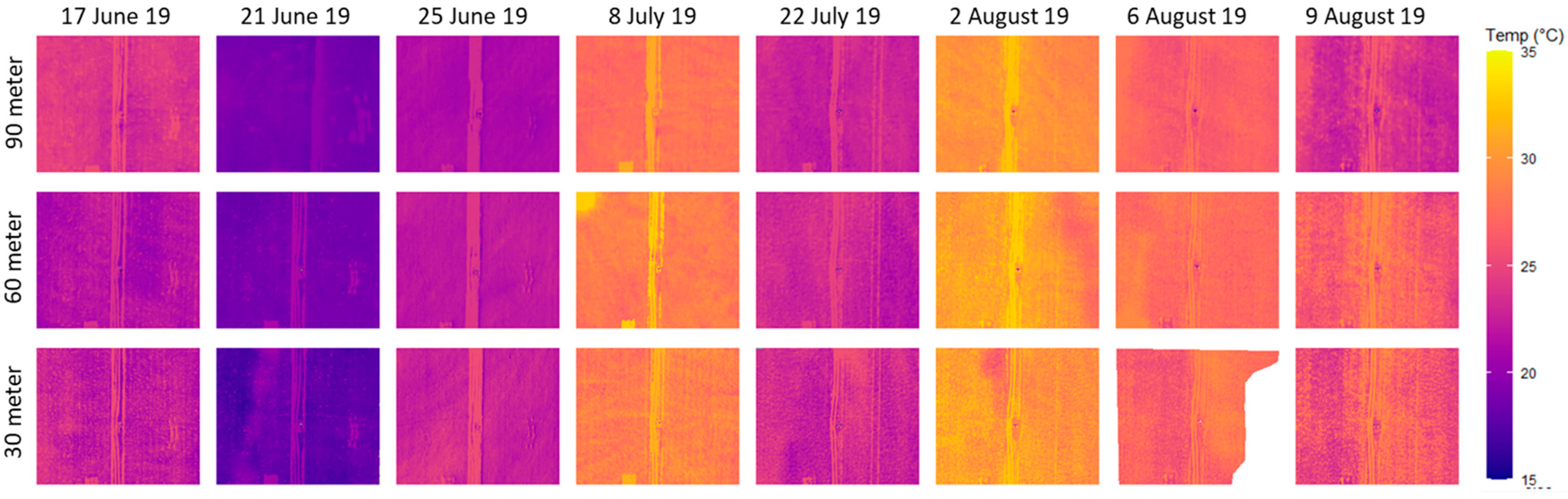
3.3. Surface Temperature
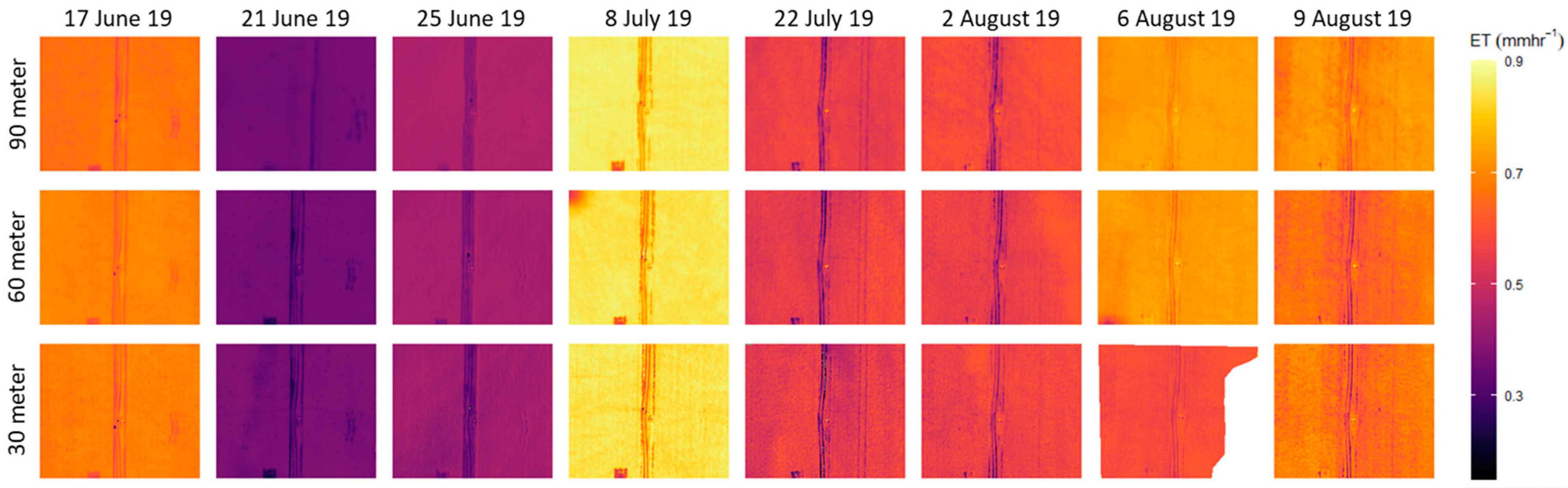
3.4. HRMET ET
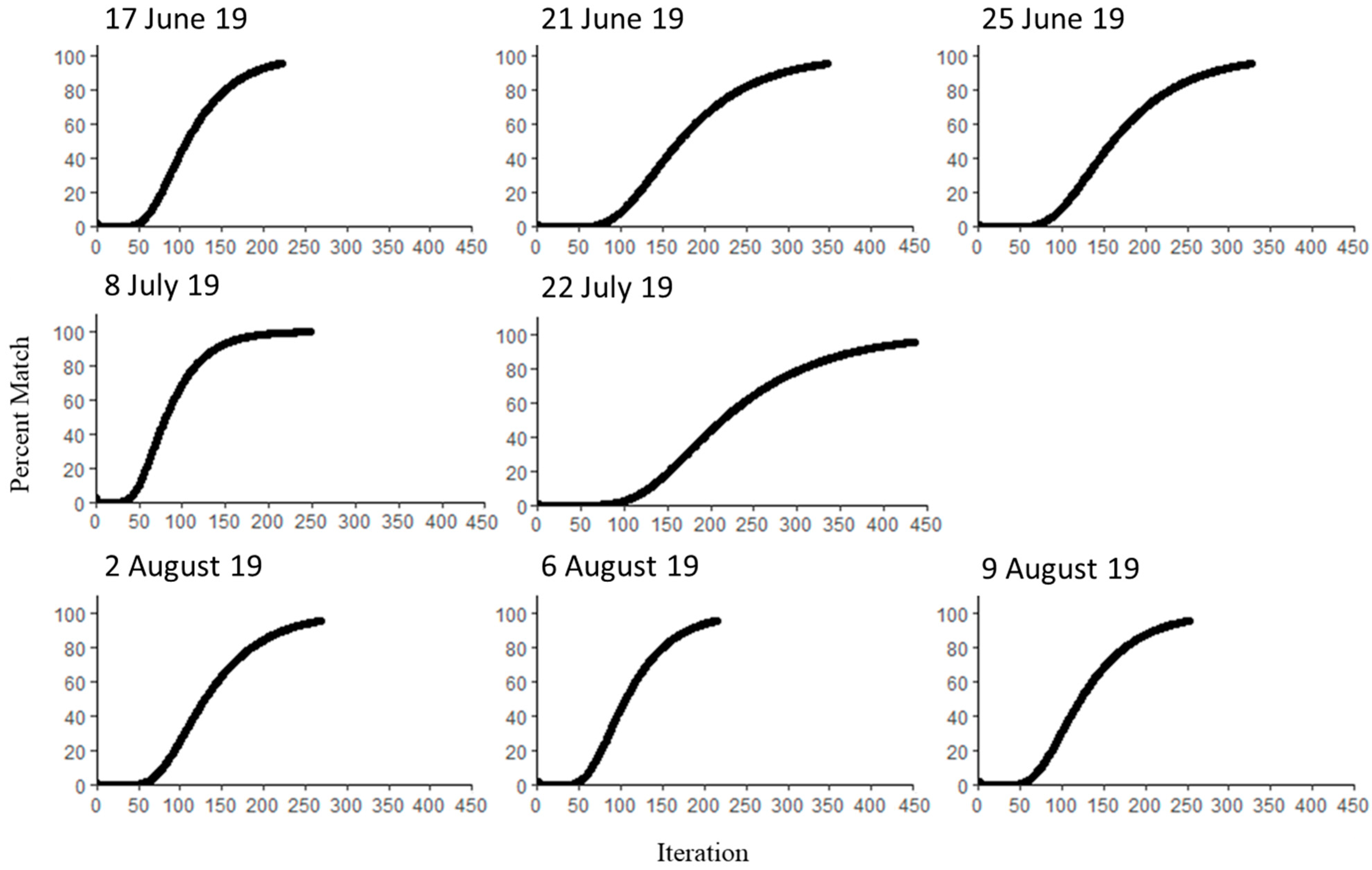
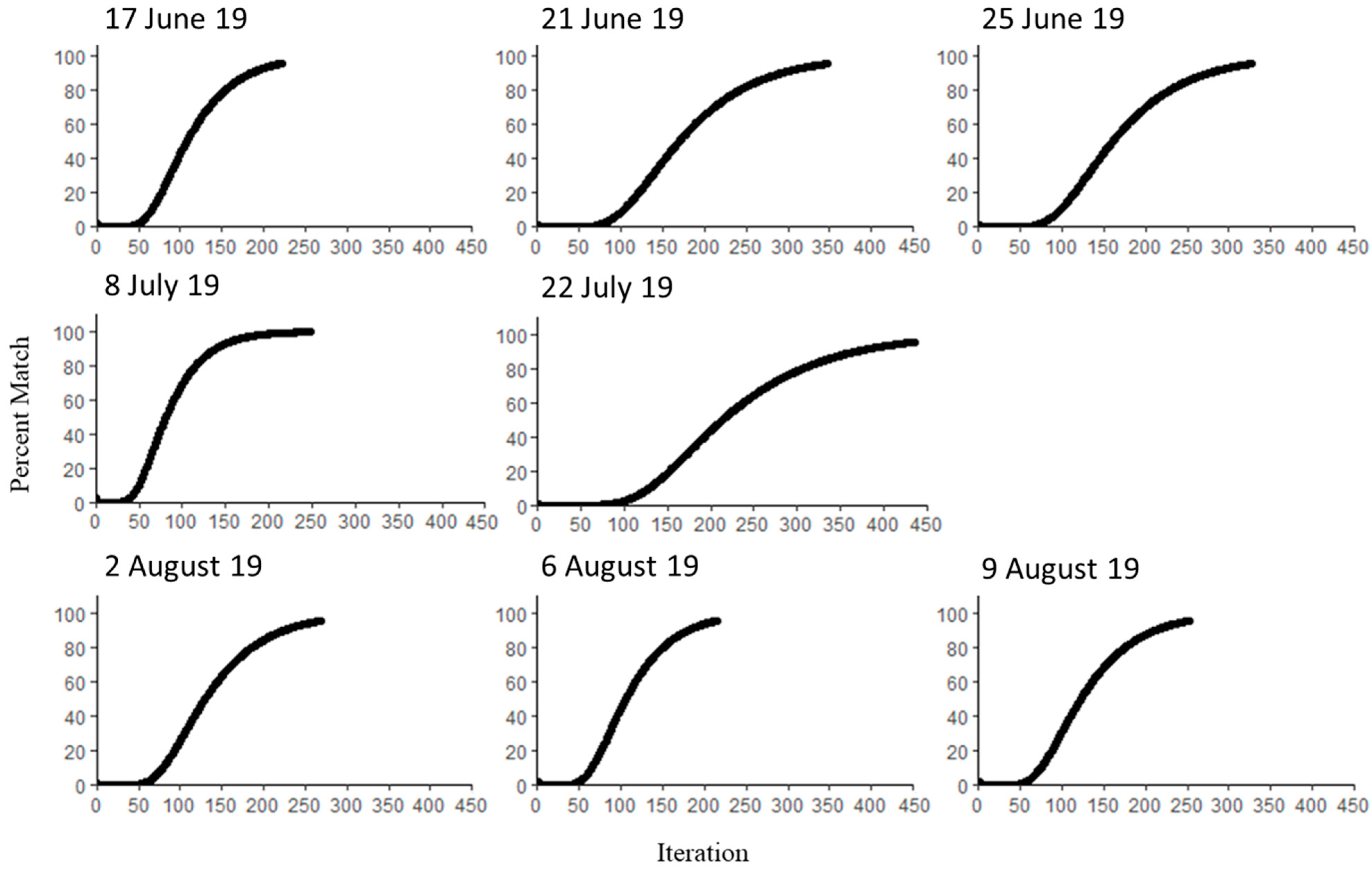
3.5. Monte Carlo Uncertainty Assessment
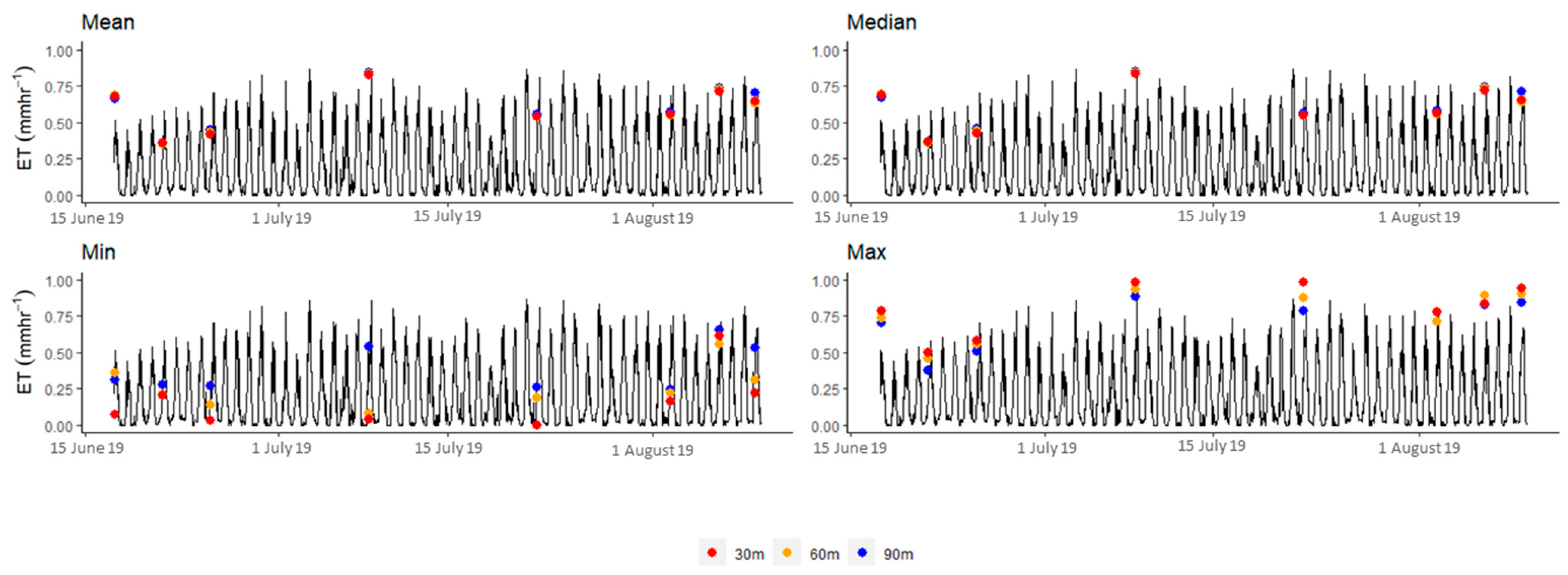
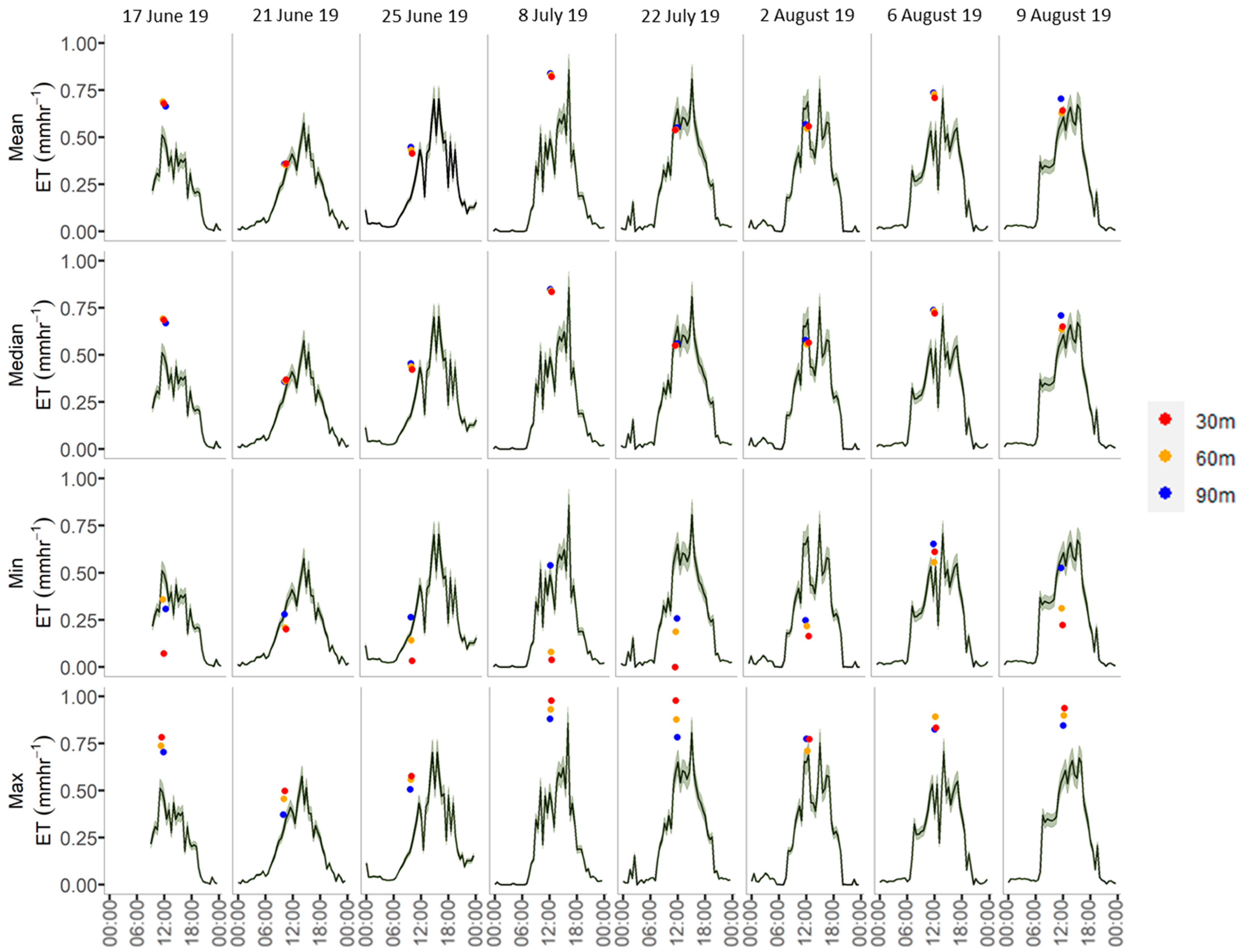
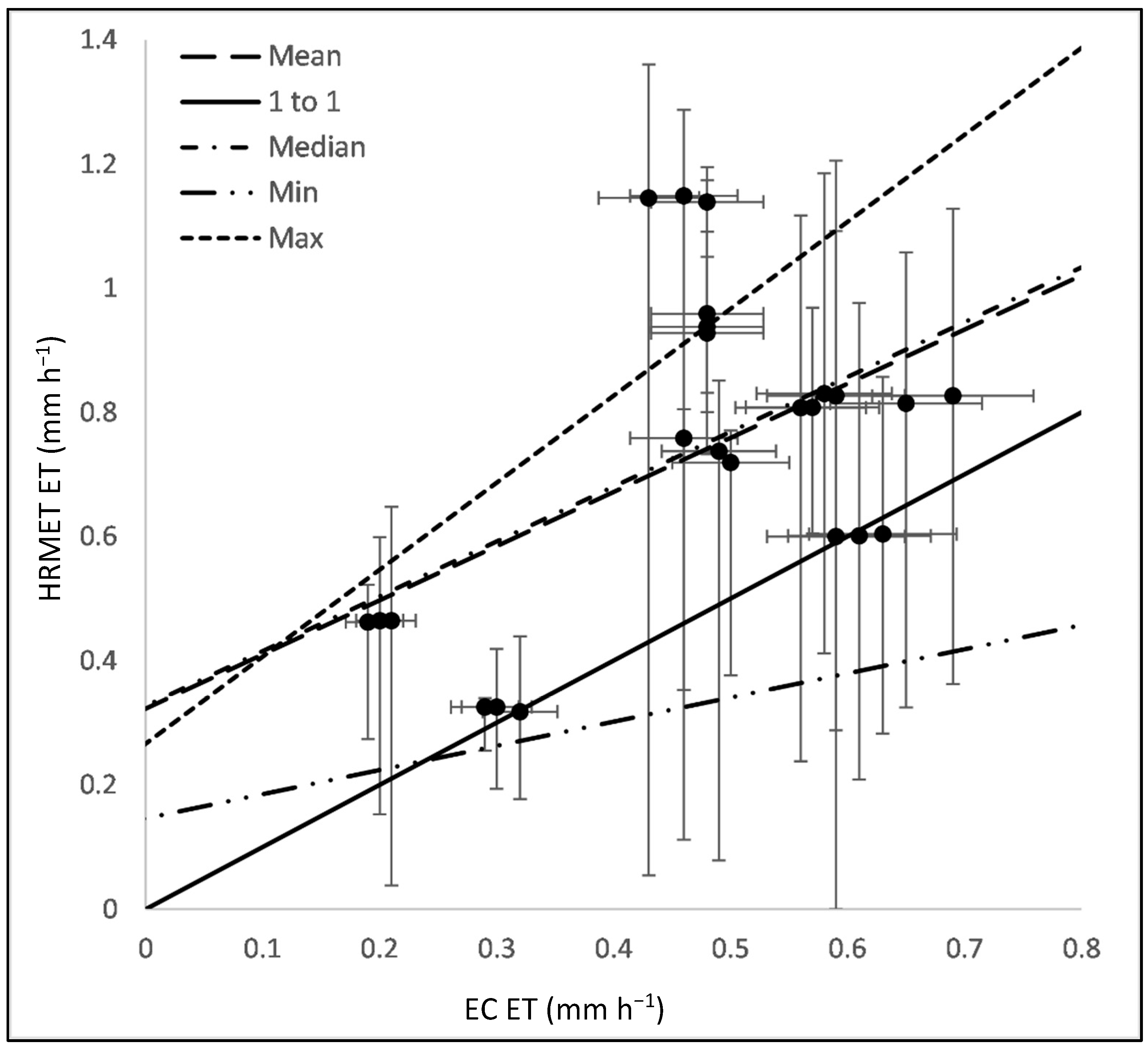
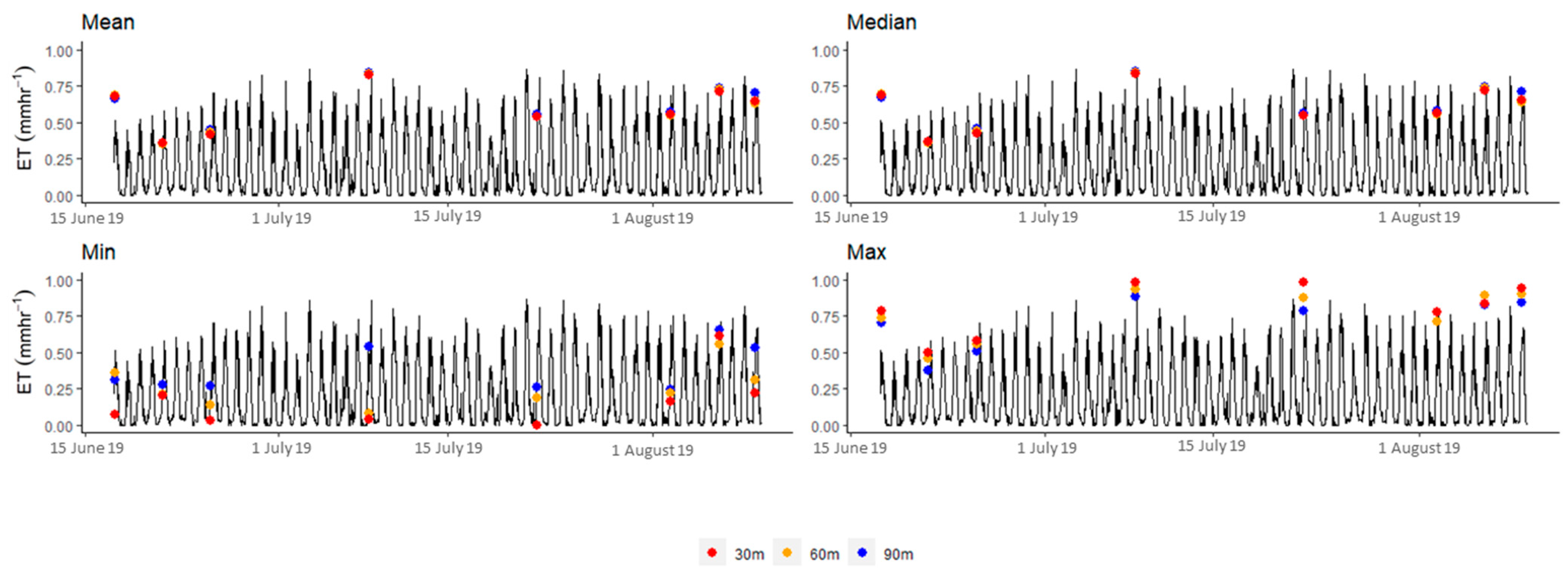
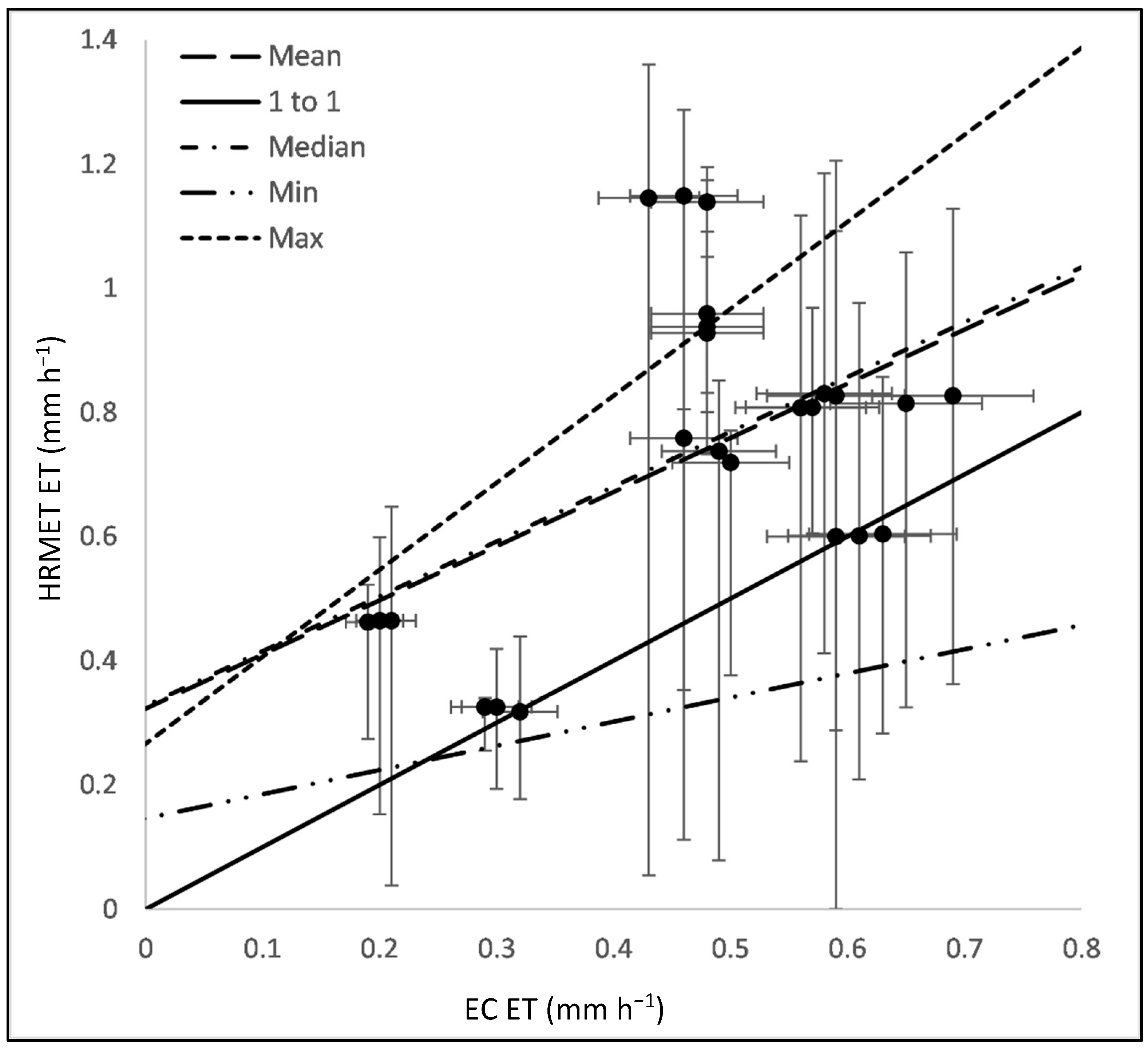
3.6. Comparison of HRMET with Eddy Covariance
4. Discussion
4.1. Comparison of HRMET and Eddy Covariance ET Estimates
4.2. Adapting the HRMET Model for Very High-Resolution Imagery
4.3. How High to Fly?
4.4. When to Fly?
4.5. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elevation (m) | 25 June 2019 | 8 July 2019 | 22 July 2019 | 2 August 2019 | 6 August 2019 | 9 August 2019 |
|---|---|---|---|---|---|---|
| 90 | 2.00 | 4.71 | 4.28 | 1.52 | 2.72 | 5.63 |
| 60 | 2.44 | 8.42 | 2.77 | 4.51 | 2.04 | 2.93 |
| 30 | 3.59 | 6.41 | 1.64 | 1.20 | 2.45 | 2.60 |
Appendix B

References
- US Geological Survey. Estimated Use of Water in the United States in 2015; USGS: Reston, WA, USA, 2015.
- Park, M. Fertilizers and the environment. Nutr. Cycl. Agroecosyst. 1999, 55, 117–121. [Google Scholar] [CrossRef]
- Bai, Y.-C.; Chang, Y.-Y.; Hussain, M.; Lu, B.; Zhang, J.-P.; Song, X.-B.; Lei, X.-S.; Pei, D. Soil Chemical and Microbiological Properties Are Changed by Long-Term Chemical Fertilizers That limit Ecosystems Functioning. Microorganisms 2020, 8, 694. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.J.; Feng, J.X. Precision irrigation and its prospect analysis. Water Sav. Irrig. 2006, 43, 43–44. [Google Scholar]
- Sadler, E.J.; Evans, R.G.; Stone, K.C.; Camp, C.R. Opportunities for conservation with precision irrigation. J. Soil Water Conserv. 2005, 60, 371–379. [Google Scholar]
- Barzegari, M.; Sepaskhah, A.R.; Ahmadi, S.H. Irrigation and nitrogen managements affect nitrogen leaching and root yield of sugar beet. Nutr. Cycl. Agroecosyst. 2017, 108, 211–230. [Google Scholar] [CrossRef]
- Hedley, C.; Yule, I.; Bradbury, S. Analysis of potential benefits of precision irrigation for variable soils at five pastoral and arable production sites in New Zealand. In Proceedings of the 19th World Soil Congress, Brisbane, Australia, 6–9 August 2010. [Google Scholar]
- Liang, Z.; Liu, X.; Xiong, J.; Xiao, J. Water Allocation and Integrative Management of Precision Irrigation: A Systematic Review. Water 2020, 12, 3135. [Google Scholar] [CrossRef]
- Nocco, M.A.; Zipper, S.C.; Booth, E.G.; Cummings, C.R.; Ii, S.P.L.; Kucharik, C.J. Combining Evapotranspiration and Soil Apparent Electrical Conductivity Mapping to Identify Potential Precision Irrigation Benefits. Remote Sens. 2019, 11, 2460. [Google Scholar] [CrossRef] [Green Version]
- King, B.A.; Stark, J.C.; Wall, R.W. Comparison of site-specific and conventional uniform irrigation management for potatoes. Appl. Eng. Agric. 2006, 22, 677–688. [Google Scholar] [CrossRef]
- Asfaw, E.; Suryabhagavan, K.V.; Argaw, M. Soil salinity modeling and mapping using remote sensing and GIS: The case of Wonji sugar cane irrigation farm, Ethiopia. J. Saudi Soc. Agric. Sci. 2016, 17, 250–258. [Google Scholar] [CrossRef] [Green Version]
- Hoffmann, H.; Nieto, H.; Jensen, R.; Guzinski, R.; Zarco-Tejada, P.; Friborg, T. Estimating evaporation with thermal UAV data and two-source energy balance models. Hydrol. Earth Syst. Sci. 2016, 20, 697–713. [Google Scholar] [CrossRef] [Green Version]
- Rud, R.; Cohen, Y.; Alchanatis, V.; Levi, A.; Brikman, R.; Shenderey, C.; Heuer, B.; Markovitch, T.; Dar, Z.; Rosen, C.; et al. Crop water stress index derived from multi-year ground and aerial thermal images as an indicator of potato water status. Precis. Agric. 2014, 15, 273–289. [Google Scholar] [CrossRef]
- Khanal, S.; Fulton, J.; Shearer, S. An overview of current and potential applications of thermal remote sensing in precision agriculture. Comput. Electron. Agric. 2017, 139, 22–32. [Google Scholar] [CrossRef]
- Barbedo, J.G.A. A Review on the Use of Unmanned Aerial Vehicles and Imaging Sensors for Monitoring and Assessing Plant Stresses. Drones 2019, 3, 40. [Google Scholar] [CrossRef] [Green Version]
- Cazaurang, F.; Cohen, K.; Kumar, M. Multi-Rotor Platform-Based UAV Systems; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Calera, A.; Campos, I.; Osann, A.; D’Urso, G.; Menenti, M. Remote sensing for crop water management: From ET modelling to services for the end users. Sensors 2017, 17, 1104. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kustas, W.P.; Norman, J.M. Use of remote sensing for evapotranspiration monitoring over land surfaces. Hydrol. Sci. J. 1996, 41, 495–516. [Google Scholar] [CrossRef]
- Xue, J.; Bali, K.M.; Light, S.; Hessels, T.; Kisekka, I. Evaluation of remote sensing-based evapotranspiration models against surface renewal in almonds, tomatoes and maize. Agric. Water Manag. 2020, 238, 106228. [Google Scholar] [CrossRef]
- Wandera, L.; Mallick, K.; Kiely, G.; Roupsard, O.; Peichl, M.; Magliulo, V. Upscaling instantaneous to daily evapotranspiration using modelled daily shortwave radiation for remote sensing applications: An artificial neural network approach. Hydrol. Earth Syst. Sci. 2017, 21, 197–215. [Google Scholar] [CrossRef] [Green Version]
- Norman, J.M.; Kustas, W.P.; Humes, K.S. Source approach for estimating soil and vegetation energy fluxes in observations of directional radiometric surface temperature. Agric. For. Meteorol. 1995, 77, 263–293. [Google Scholar] [CrossRef]
- Yang, Y.; Shang, S. A hybrid dual-source scheme and trapezoid framework-based evapotranspiration model (HTEM) using satellite images: Algorithm and model test. J. Geophys. Res. Atmos. 2013, 118, 2284–2300. [Google Scholar] [CrossRef]
- Bastiaanssen, W.G.M.; Meneti, M.; Feddes, R.A.; Holtslag, A.A.M. A remote sensing surface energy balance algorithm for land (SEBAL). Hydrology 1998, 212–213, 198–212. [Google Scholar] [CrossRef]
- Feng, J.; Wang, Z. A satellite-based energy balance algorithm with reference dry and wet limits. Int. J. Remote Sens. 2013, 34, 2925–2946. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.J.; Strachan, I.B. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Espinoza, C.Z.; Khot, L.R.; Sankaran, S.; Jacoby, P.W. High resolution multispectral and thermal remote sensing-based water stress assessment in subsurface irrigated grapevines. Remote Sens. 2017, 9, 961. [Google Scholar] [CrossRef] [Green Version]
- Gerhards, M.; Rock, G.; Schlerf, M.; Udelhoven, T. Water stress detection in potato plants using leaf temperature, emissivity, and reflectance. Int. J. Appl. Earth Obs. Geoinf. 2016, 53, 27–39. [Google Scholar] [CrossRef]
- Nocco, M.A.; Kraft, G.J.; Loheide, S.P.; Kucharik, C.J. Drivers of Potential Recharge from Irrigated Agroecosystems in the Wisconsin Central Sands. Vadose Zone J. 2018, 17, 170008. [Google Scholar] [CrossRef] [Green Version]
- Allen, R.G.; Tasumi, M.; Trezza, R. Satellite-Based Energy Balance for Mapping Evapotranspiration with Internalized Calibration (METRIC)—Model. J. Irrig. Drain. Eng. 2007, 133, 395–406. [Google Scholar] [CrossRef]
- Talsma, C.J.; Good, S.P.; Jimenez, C.; Martens, B.; Fisher, J.B.; Miralles, D.; McCabe, M.; Purdy, A.J. Partitioning of evapotranspiration in remote sensing-based models. Agric. For. Meteorol. 2018, 260–261, 131–143. [Google Scholar] [CrossRef]
- Smail, R.; Nocco, M.; Colquhoun, J.; Wang, Y. Remotely-sensed water budgets for agriculture in the upper midwestern United States. Agric. Water Manag. 2021, 258, 107187. [Google Scholar] [CrossRef]
- Nassar, A.; Torres-Rua, A.; Kustas, W.; Nieto, H.; McKee, M.; Hipps, L.; Stevens, D.; Alfieri, J.; Prueger, J.; Alsina, M.M.; et al. Influence of model grid size on the estimation of surface fluxes using the two source energy balance model and sUAS imagery in vineyards. Remote Sens. 2020, 12, 342. [Google Scholar] [CrossRef] [Green Version]
- Xia, T.; Kustas, W.P.; Anderson, M.C.; Alfieri, J.G.; Gao, F.; McKee, L.; Prueger, J.H.; Geli, H.M.E.; Neale, C.M.U.; Sanchez, L.; et al. Mapping evapotranspiration with high-resolution aircraft imagery over vineyards using one-and two-source modeling schemes. Hydrol. Earth Syst. Sci. 2016, 20, 1523–1545. [Google Scholar] [CrossRef] [Green Version]
- Mokhtari, A.; Ahmadi, A.; Daccache, A.; Dreschsler, K. Actual Evapotranspiration from UAV Images: A Multi-Sensor Data Fusion Approach. Remote Sens. 2021, 13, 2315. [Google Scholar] [CrossRef]
- Nassar, A.; Torres-Rua, A.; Hipps, L.; Kustas, W.; McKee, M.; Stevens, D.; Nieto, H.; Keller, D.; Gowing, I.; Coopmans, C. Using Remote Sensing to Estimate Scales of Spatial Heterogeneity to Analyze Evapotranspiration Modeling in a Natural Ecosystem. Remote Sens. 2022, 14, 372. [Google Scholar] [CrossRef]
- USDA. United States Summary and State Data. In 2017 Census of Agriculture; USDA: Washington, DC, USA, 2019. [Google Scholar]
- USDA. Wisconsin Ag News—Potatoes; USDA: Washington, DC, USA, 2020.
- WI-DNR. Central Sand Plains Ecological Landscape. In The Ecological Landscapes of Wisconsin: An Assessment of Ecological Resources and a Guide to Planning Sustainable Management; WI-DNR: Madison, WI, USA, 2014; 108p. [Google Scholar]
- Kraft, G.J.; Mechenich, D.J. Groundwater Pumping Effects on Groundwater Levels, Lake Levels, and Streamflows in the Wisconsin Central Sands; Center for Watershed Science and Education College of Natural Resources: Madison, WI, USA, 2010. [Google Scholar]
- Fienen, M.N.; Bradbury, K.R.; Kniffin, M.; Barlow, P.M. Depletion Mapping and Constrained Optimization to Support Managing Groundwater Extraction. Groundwater 2018, 56, 18–31. [Google Scholar] [CrossRef] [PubMed]
- Tempfli, K.; Huurneman, G.; Bakker, W.; Janssen, L.L.; Feringa, W.F.; Gieske, A.S.M.; Grabmaier, K.A.; Hecker, C.A.; Horn, J.A.; Kerle, N.; et al. Principles of Remote Sensing; International Institute for Geo-Information Science and Earth Observation: Enschede, The Netherlands, 2009. [Google Scholar]
- Allen, R.; Pereira, L.; Raes, D.; Smith, M. Crop Evapotranspiration: Guidelines for Computing Crop Water Requirments; Food and Agriculture Organization of the United Nations: Rome, Italy, 1998. [Google Scholar]
- Zipper, S.C.; Loheide, S.P. Using evapotranspiration to assess drought sensitivity on a subfield scale with HRMET, a high resolution surface energy balance model. Agric. For. Meteorol. 2014, 197, 91–102. [Google Scholar] [CrossRef]
- Hammersley, J.; Handscomb, D. Monte Carlo Methods; Chapman and Hall: London, UK, 1979. [Google Scholar]
- Desai, A.R. AmeriFlux US-CS3 Central Sands Irrigated Agricultural Field; Wisconsin Department of Natural Resources: Madison, WI, USA, 2020.
- Arriga, N.; Rannik, Ü.; Aubinet, M.; Carrara, A.; Vesala, T.; Papale, D. Experimental validation of footprint models for eddy covariance CO2 flux measurements above grassland by means of natural and artificial tracers. Agric. For. Meteorol. 2017, 242, 75–84. [Google Scholar] [CrossRef]
- Rannik, Ü.; Peltola, O.; Mammarella, I. Random uncertainties of flux measurements by the eddy covariance technique. Atmos. Meas. Tech. 2016, 9, 5163–5181. [Google Scholar] [CrossRef] [Green Version]
- Horst, T.W.; Weil, J.C. Footprint estimation for scalar flux measurements in the atmospheric surface layer. Boundary-Layer Meteorol. 1992, 59, 279–296. [Google Scholar] [CrossRef]
- Mauder, M.; Foken, T.; Cuxart, J. Surface-Energy-Balance Closure over Land: A Review. Bound.-Layer Meteorol. 2020, 177, 395–426. [Google Scholar] [CrossRef]
- Nassar, A.; Torres-Rua, A.F.; Kustas, W.P.; Nieto, H.; McKee, M.; Hipps, L.E.; Alfieri, J.G.; Prueger, J.H.; Alsina, M.M.; McKee, L.G.; et al. To what extend does the Eddy Covariance footprint cutoff influence the estimation of surface energy fluxes using two source energy balance model and high-resolution imagery in commercial vineyards? In Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping V; International Society for Optics and Photonics: Bellingham, WA, USA, 2020. [Google Scholar]
- Raj, R.; Walker, J.P.; Pingale, R.; Nandan, R.; Naik, B.; Jagarlapudi, A. Leaf area index estimation using top-of-canopy airborne RGB images. Int. J. Appl. Earth Obs. Geoinf. 2020, 96, 102282. [Google Scholar] [CrossRef]
- Haala, N. Multiray Photogrammetry and Dense Image Matching. In Photogrammetric Week; VDE: Berlin, Germany, 2011. [Google Scholar]
- Zhang, N.; Wang, M.; Wang, N. Precision agriculture—A worldwide overview. Comput. Electron. Agric. 2002, 36, 113–132. [Google Scholar] [CrossRef]
- Sánchez, J.M.; López-Urrea, R.; Rubio, E.; González-Piqueras, J.; Caselles, V. Assessing crop coefficients of sunflower and canola using two-source energy balance and thermal radiometry. Agric. Water Manag. 2014, 137, 23–29. [Google Scholar] [CrossRef]
- Capturing from Low Altitudes and from a Fixed Point. Available online: https://support.micasense.com/hc/en-us/articles/360045449134-Capturing-from-low-altitudes-and-from-a-fixed-point (accessed on 15 September 2021).
- Gonzalez-Dugo, V.; Zarco-Tejada, P.; Nicolás, E.; Nortes, P.A.; Alarcón, J.J.; Intrigliolo, D.S.; Fereres, E.J.P.A. Using high resolution UAV thermal imagery to assessthe variability in the water status of five fruit tree specieswithin a commercial orchard. Nature 2018, 388, 539–547. [Google Scholar]
- Luedeling, E.; Hale, A.; Zhang, M.; Bentley, W.J.; Dharmasri, L.C. Remote sensing of spider mite damage in California peach orchards. Int. J. Appl. Earth Obs. Geoinf. 2009, 11, 244–255. [Google Scholar] [CrossRef]
- Fouche, P.S. The use of low-altitude infrared remote sensing for estimating stress conditions in tree crops. S. Afr. J. Sci. 1995, 91, 500–502. [Google Scholar]
- Gallego, J.; Carfagna, E.; Baruth, B. Accuracy, Objectivity and Efficiency of Remote Sensing for Agricultural Statistics. In Agricultural Survey Methods; Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]
- Ozdogan, M.; Yang, Y.; Allez, G.; Cervantes, C. Remote Sensing of Irrigated Agriculture: Opportunities and Challenges. Remote Sens. 2010, 2, 2274–2304. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.-L.; Tang, R.; Wan, Z.; Bi, Y.; Zhou, C.; Tang, B.; Yan, G.; Zhang, X. A Review of Current Methodologies for Regional Evapotranspiration Estimation from Remotely Sensed Data. Sensors 2009, 9, 3801–3853. [Google Scholar] [CrossRef] [Green Version]
- Simpson, J.; Holman, F.; Nieto, H.; Voelksch, I.; Mauder, M.; Klatt, J.; Fiener, P.; Kaplan, J. High spatial and temporal resolution energy flux mapping of different land covers using an off-the-shelf unmanned aerial system. Remote Sens. 2021, 13, 1286. [Google Scholar] [CrossRef]
- Ha, W.; Kolb, T.E.; Springer, A.E.; Dore, S.; O’Donnell, F.C.; Morales, R.M.; Lopez, S.M.; Koch, G.W. Evapotranspiration comparisons between eddy covariance measurements and meteorological and remote-sensing-based models in disturbed ponderosa pine forests. Ecohydrology 2014, 8, 1335–1350. [Google Scholar] [CrossRef]




| Mission Set | Date (DOY) | Flight Time (CST) | Air Temperature (°C) | Wind Speed (m s−1) | Solar Radiation (W m−2) | Vapor Pressure (kPa) |
|---|---|---|---|---|---|---|
| 1 | 17 June 2019 (170) | 11:11–11:51 | 24.5 (0.2) | 1.7 (0.3) | 724.8 (0.7) | 0.8 (0.0) |
| 2 | 21 June 2019 (172) | 9:52–10:18 | 19.4 (0.2) | 1.4 (0.2) | 413.6 (2.7) | 1.0 (0.0) |
| 3 | 25 June 2019 (176) | 9:31–9:51 | 20.9 (0.8) | 1.7 (0.2) | 498.6 (0.1) | 1.5 (0.0) |
| 4 | 8 July 2019 (189) | 12:03–12:24 | 26.3 (0.4) | 0.9 (0.2) | 809.7 (3.3) | 1.7 (0.0) |
| 5 | 22 July 2019 (203) | 11:25–12:51 | 21.6 (0.6) | 3.5 (0.4) | 621.3 (16.1) | 1.3 (0.0) |
| 6 | 2 August 2019 (214) | 11:58–12:45 | 26.8 (0.3) | 1.1 (0.3) | 627.3 (4.3) | 1.9 (0.0) |
| 7 | 6 August 2019 (218) | 11:57–12:37 | 25.1 (0.4) | 1.4 (0.2) | 756.8 (5.2) | 2.1 (0.1) |
| 8 | 9 August 2019 (221) | 11:57–12:19 | 22.6 (0.4) | 2.1 (0.3) | 746.7 (4.4) | 1.4 (0.1) |
| HRMET Input | Spatial Resolution | Frequency | Source | Uncertainty Estimation Used in Monte Carlo Calculations |
|---|---|---|---|---|
| Canopy temperature | 20–60 cm | Instantaneous | Micasense Altum (Section 2.3) | Ground reference data and drone collected data used to calculate Root mean square error (RMSE) of the regression (Section 2.4). |
| LAI | 1.3–3.9 cm | Instantaneous | Micasense Altum (Section 2.4) | RMSE from the regression between LAI and EVI (Section 2.5) |
| Height | 1.3–3.9 cm | Instantaneous | Micasense Altum (Section 2.4) | RMSE from the regression between height and EVI (Section 2.5) |
| Air temperature | Fixed | 5-min | Meteorological station (Section 2.5) | Standard deviation of measurements 30-min before and after the takeoff time |
| Wind speed | Fixed | 5-min | Meteorological station (Section 2.5) | Standard deviation of measurements 30-min before and after the takeoff time |
| Relative humidity | Fixed | 5-min | Meteorological station (Section 2.5) | Standard deviation of measurements 30-min before and after the takeoff time |
| Solar Radiation | Fixed | 1-h | Meteorological station (Section 2.5) | RMSE from the regression of the three measurements surrounding the takeoff time |
| Albedo | Fixed | Fixed | Empirical (Section 2.6) | 0.05 standard deviation imposed |
| Emissivity | Fixed | Fixed | Empirical (Section 2.6) | 0.01 standard deviation imposed |
| Elevation (m) | 17 June 2019 | 21 June 2019 | 25 June 2019 | 8 July 2019 | 22 July 2019 | 2 August 2019 | 6 August 2019 | 9 August 2019 |
|---|---|---|---|---|---|---|---|---|
| 90 | 0.76 (0.02) | 0.33 (0.01) | 0.46 (0.02) | 1.14 (0.03) | 0.60 (0.04) | 0.83 (0.04) | 0.94 (0.01) | 0.81 (0.03) |
| 60 | 0.72 (0.02) | 0.33 (0.02) | 0.46 (0.02) | 1.15 (0.04) | 0.60 (0.04) | 0.81 (0.04) | 0.96 (0.02) | 0.83 (0.04) |
| 30 | 0.74 (0.03) | 0.32 (0.03) | 0.46 (0.03) | 1.15 (0.05) | 0.60 (0.06) | 0.81 (0.04) | 0.93 (0.02) | 0.83 (0.05) |
| Slope | y-Intercept | R2 | RMSE | |
|---|---|---|---|---|
| Mean | 0.87 | 0.32 | 0.26 | 0.21 |
| Median | 0.88 | 0.33 | 0.26 | 0.21 |
| Min | 0.39 | 0.15 | 0.05 | 0.29 |
| Max | 1.40 | 0.27 | 0.48 | 0.32 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ebert, L.A.; Talib, A.; Zipper, S.C.; Desai, A.R.; Paw U, K.T.; Chisholm, A.J.; Prater, J.; Nocco, M.A. How High to Fly? Mapping Evapotranspiration from Remotely Piloted Aircrafts at Different Elevations. Remote Sens. 2022, 14, 1660. https://doi.org/10.3390/rs14071660
Ebert LA, Talib A, Zipper SC, Desai AR, Paw U KT, Chisholm AJ, Prater J, Nocco MA. How High to Fly? Mapping Evapotranspiration from Remotely Piloted Aircrafts at Different Elevations. Remote Sensing. 2022; 14(7):1660. https://doi.org/10.3390/rs14071660
Chicago/Turabian StyleEbert, Logan A., Ammara Talib, Samuel C. Zipper, Ankur R. Desai, Kyaw Tha Paw U, Alex J. Chisholm, Jacob Prater, and Mallika A. Nocco. 2022. "How High to Fly? Mapping Evapotranspiration from Remotely Piloted Aircrafts at Different Elevations" Remote Sensing 14, no. 7: 1660. https://doi.org/10.3390/rs14071660
APA StyleEbert, L. A., Talib, A., Zipper, S. C., Desai, A. R., Paw U, K. T., Chisholm, A. J., Prater, J., & Nocco, M. A. (2022). How High to Fly? Mapping Evapotranspiration from Remotely Piloted Aircrafts at Different Elevations. Remote Sensing, 14(7), 1660. https://doi.org/10.3390/rs14071660