
Microburst, Windshear, Gust Front, and Vortex Detection in Mega Airport Using a Single Coherent Doppler Wind Lidar


Abstract
1. Introduction
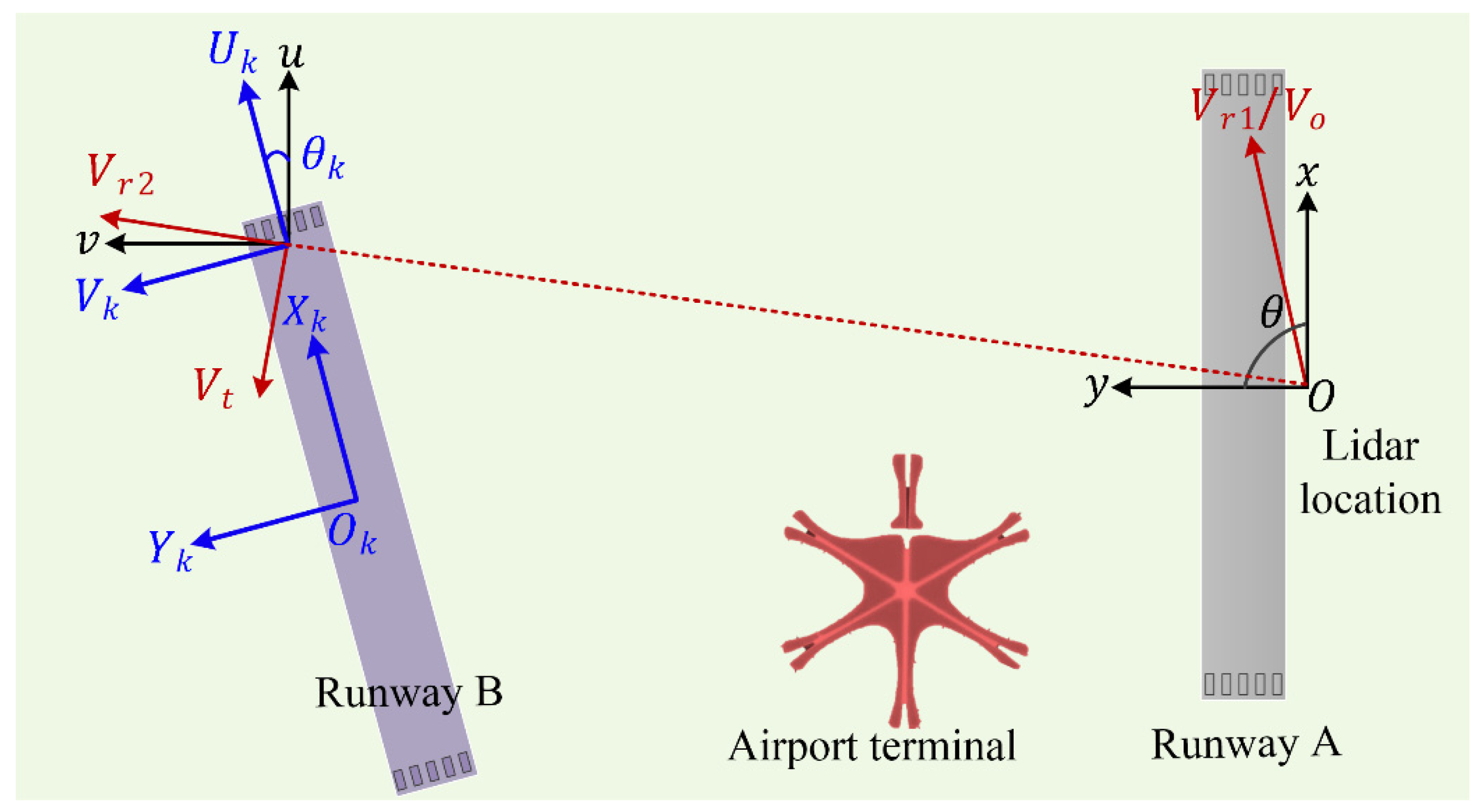
2. Windshear Evaluation Method
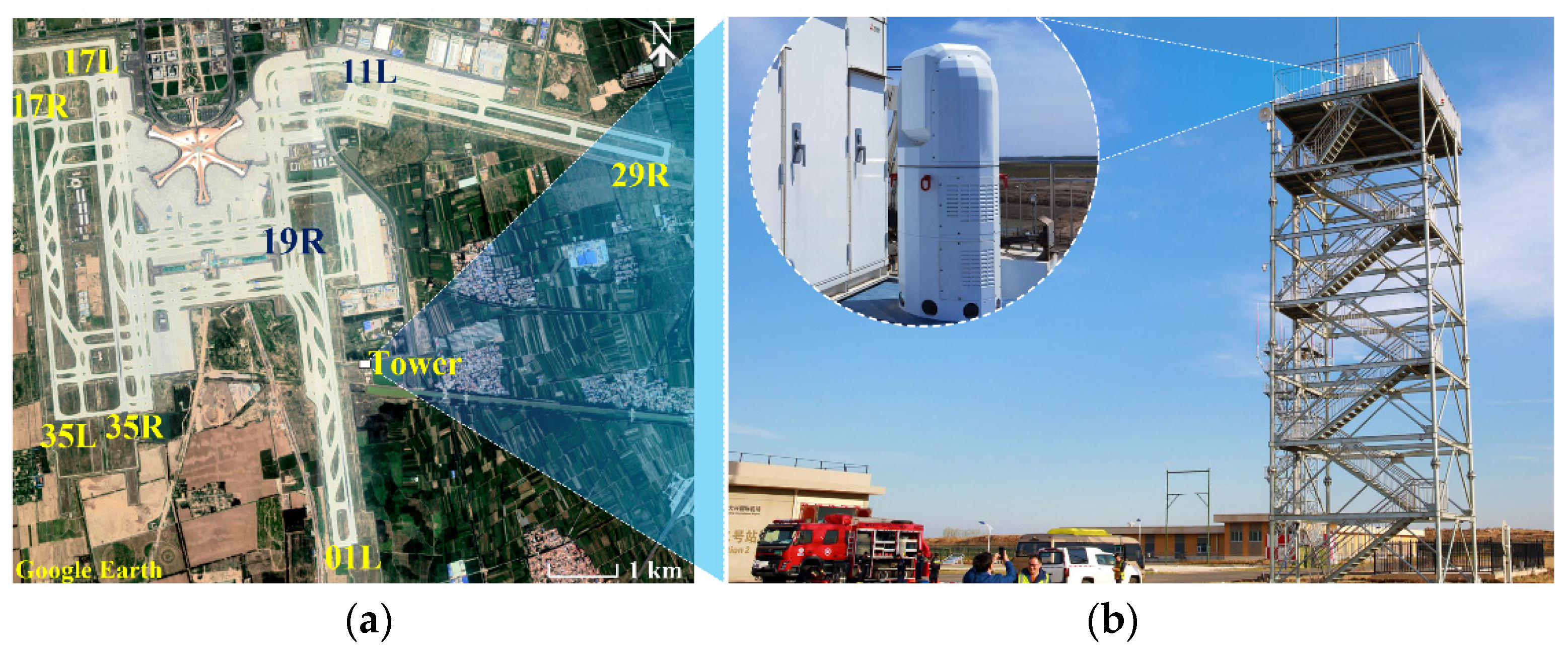
3. Experiment and Result
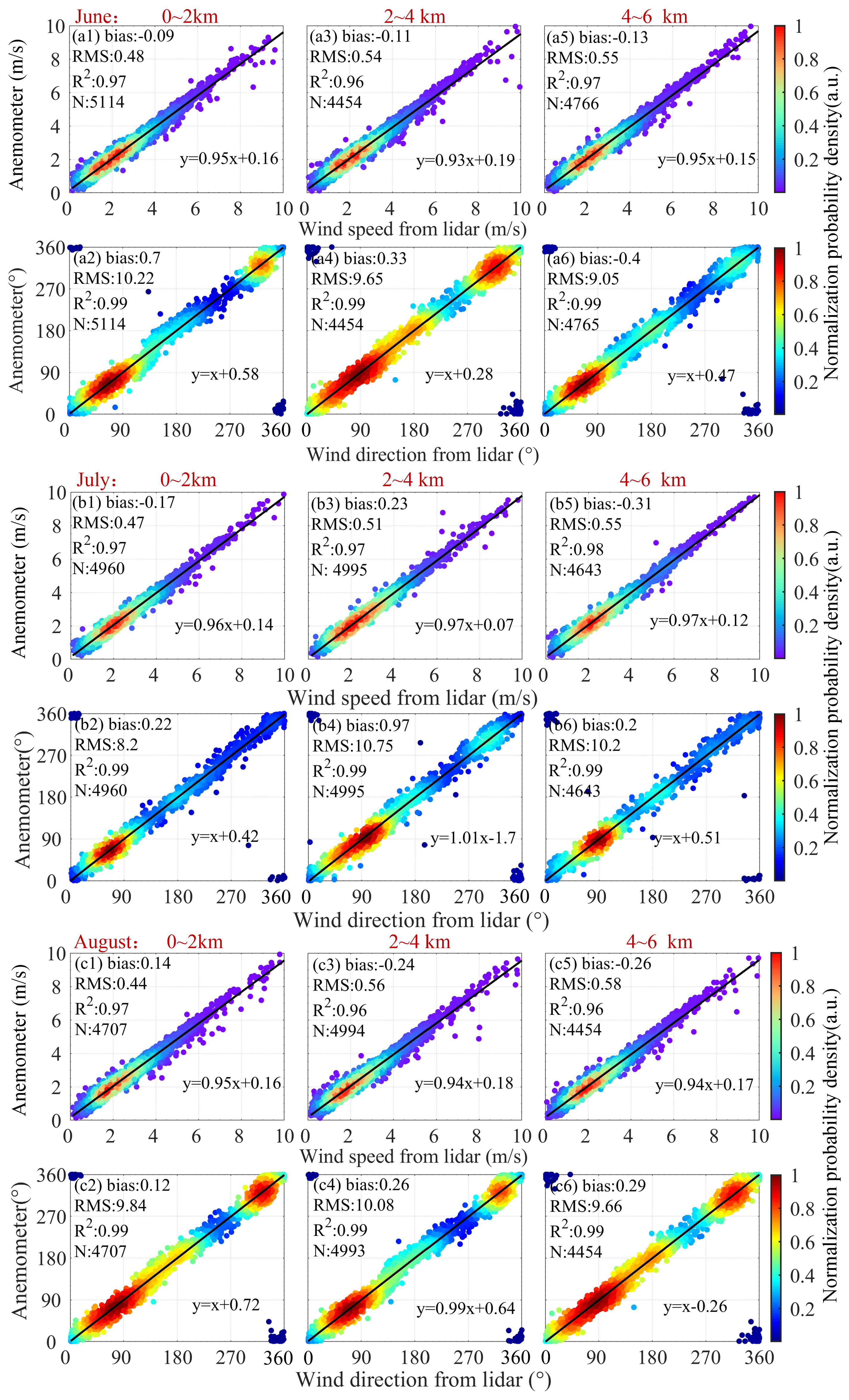
3.1. 2D Wind Field Retrieval and Verification
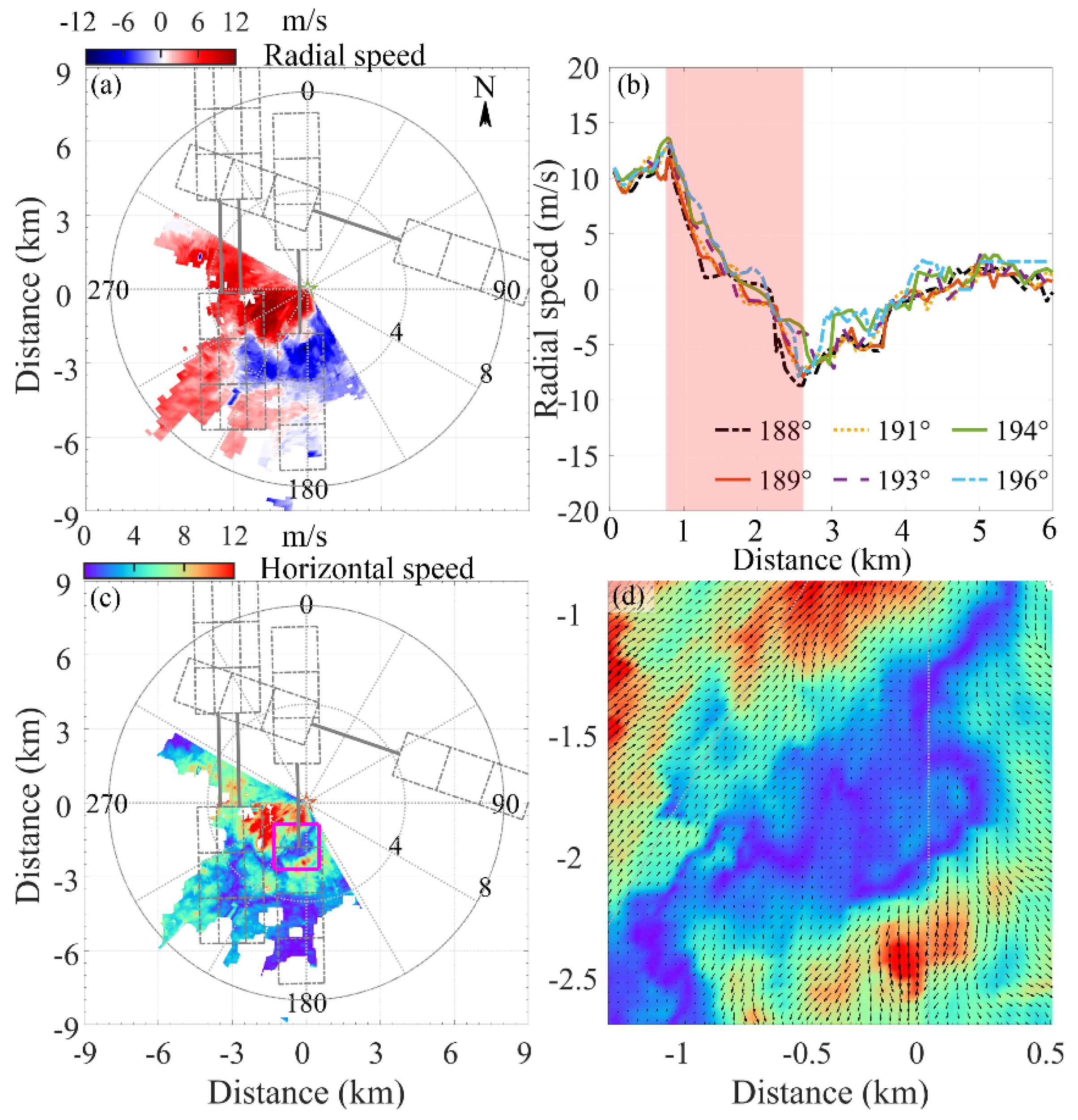
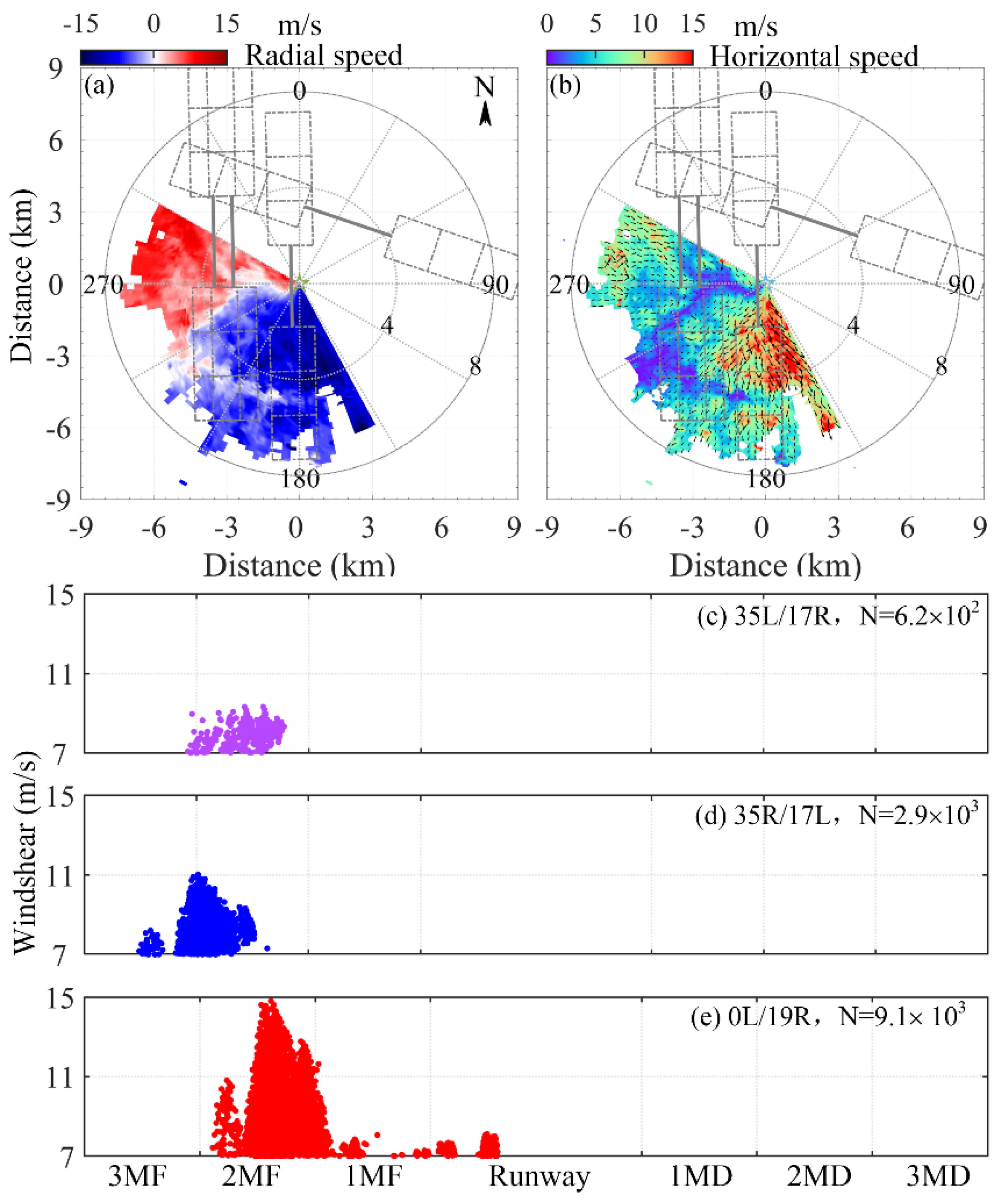
3.2. Microburst Observations
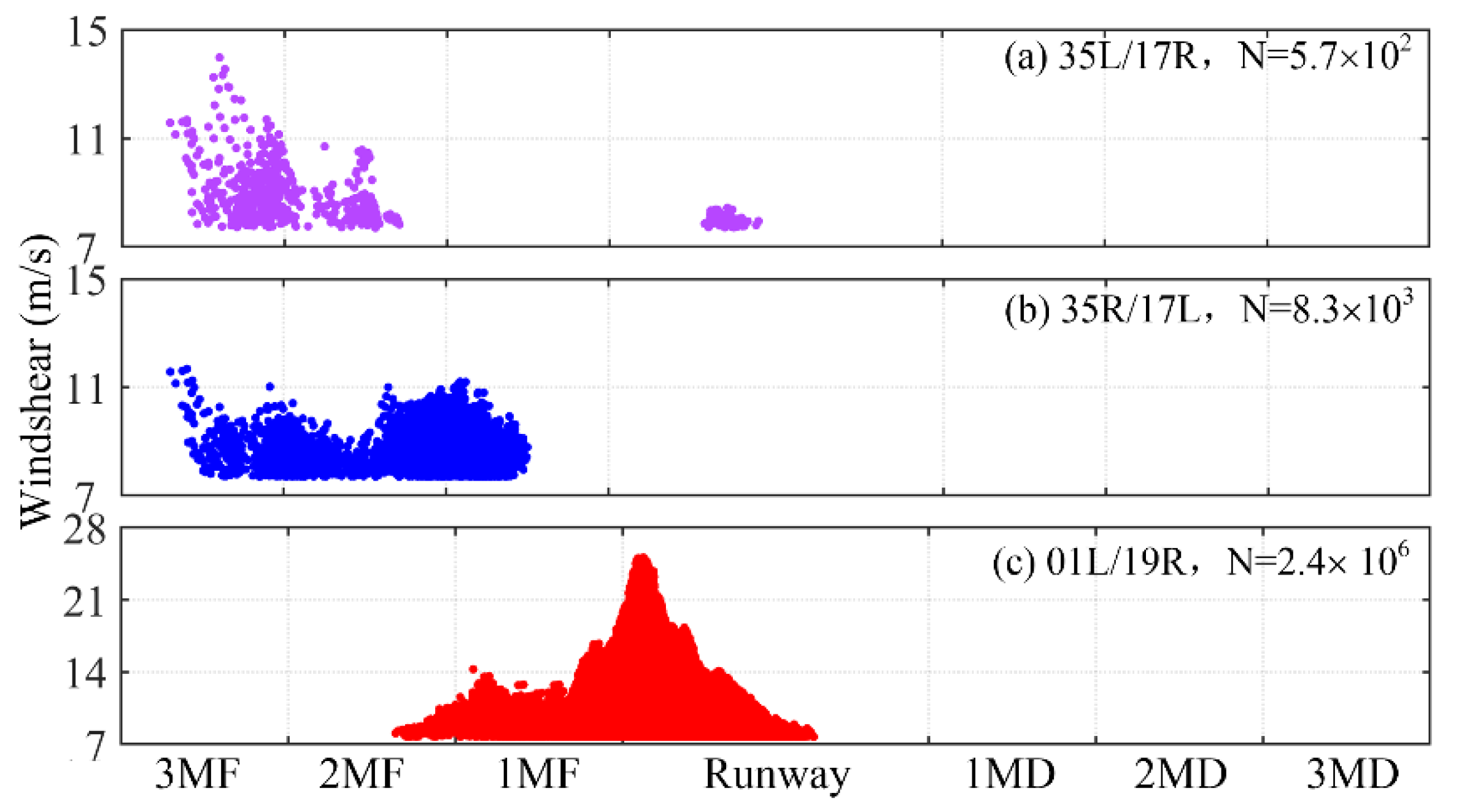
3.3. Genernal Windshear Observations
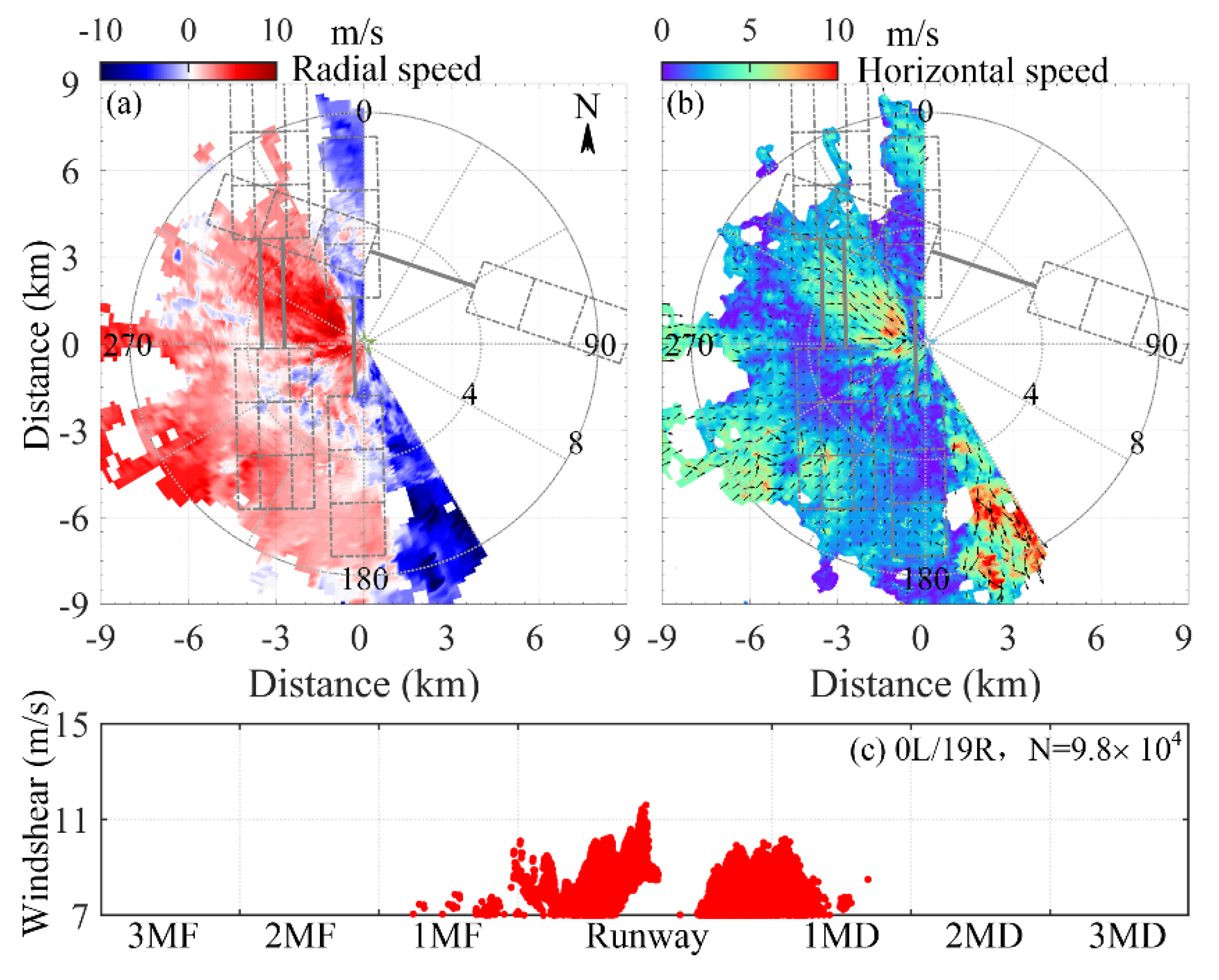
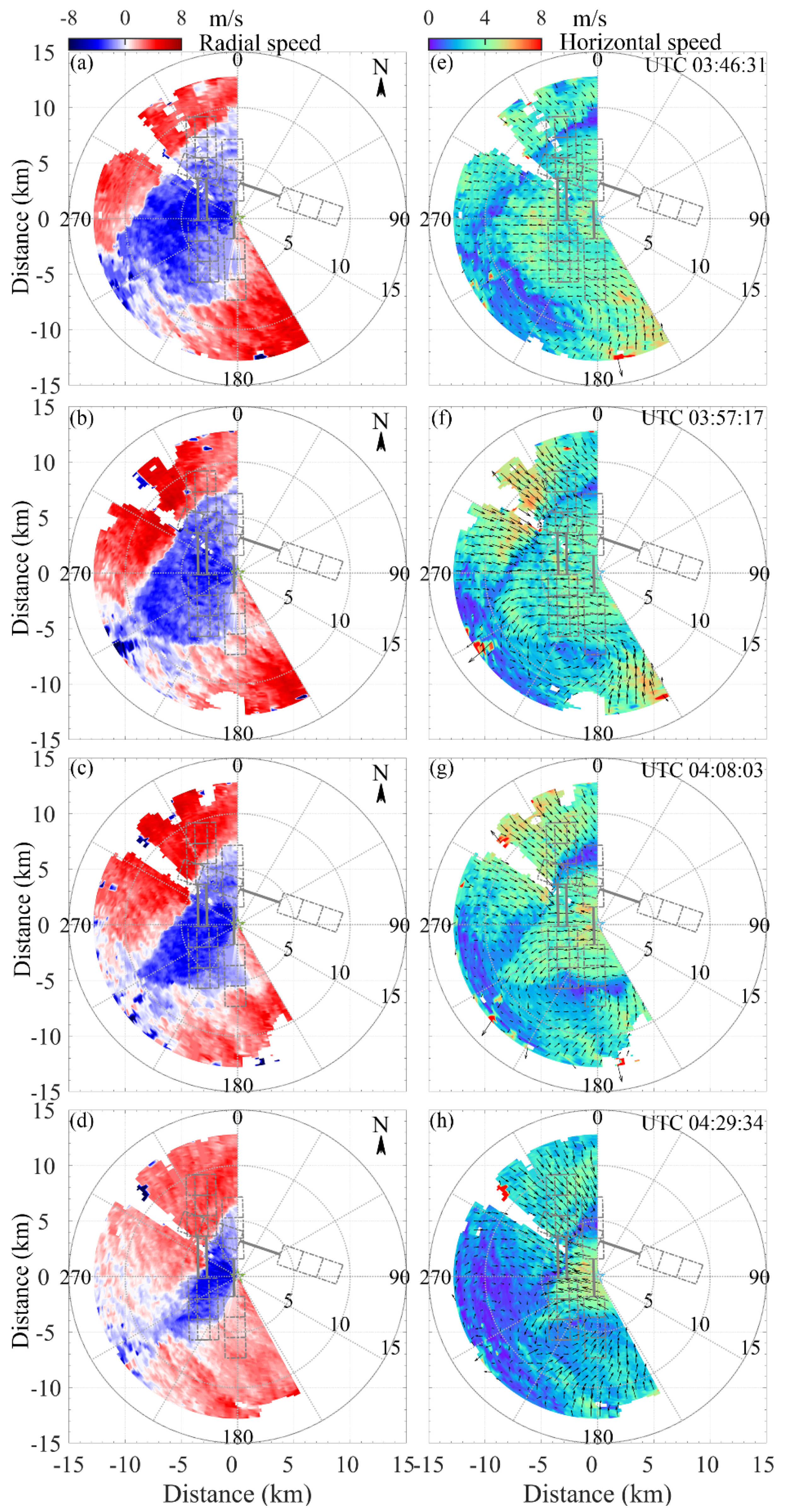
3.4. Gust Front and Vortex Observations
3.5. Verification by Flight Crew Reports
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- ICAO. Manual on Low-Level Wind Shear; International Civil Aviation Organization: Montreal, QC, Canada, 2005. [Google Scholar]
- Yuan, J.; Xia, H.; Wei, T.; Wang, L.; Yue, B.; Wu, Y. Identifying cloud, precipitation, windshear, and turbulence by deep analysis of the power spectrum of coherent Doppler wind lidar. Opt. Express 2020, 28, 37406–37418. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Wu, S.; Wang, Q.; Liu, B.; Yin, B.; Zhai, X. Airport low-level wind shear lidar observation at Beijing Capital International Airport. Infrared Phys. Technol. 2019, 96, 113–122. [Google Scholar] [CrossRef]
- Wu, T.-C.; Hon, K.-K. Application of spectral decomposition of LIDAR-based headwind profiles in windshear detection at the Hong Kong International Airport. Meteorol. Z. 2018, 27, 33–42. [Google Scholar] [CrossRef]
- Li, L.; Shao, A.; Zhang, K.; Ding, N.; Chan, P.-W. Low-Level Wind Shear Characteristics and Lidar-Based Alerting at Lanzhou Zhongchuan International Airport, China. J. Meteorol. Res. 2020, 34, 633–645. [Google Scholar] [CrossRef]
- Lin, C.; Zhang, K.; Chen, X.; Liang, S.; Wu, J.; Zhang, W. Overview of Low-Level Wind Shear Characteristics over Chinese Mainland. Atmosphere 2021, 12, 628. [Google Scholar] [CrossRef]
- Campbell, M.W.M.D.K.-W.S.D. Wind Shear Detection with Pencil-Beam Radars. Lincoln Lab. J. 1989, 2, 483–510. [Google Scholar]
- Goff, R.C. The Low-Level Wind Shear Alert System (LLWSAS); National Aviation Facilities Experimental Center: Atlantic City, NJ, USA, 1980. [Google Scholar]
- Zhang, Y.; Guo, J.; Yang, Y.; Wang, Y.; Yim, S. Vertical Wind Shear Modulates Particulate Matter Pollutions: A Perspective from Radar Wind Profiler Observations in Beijing, China. Remote Sens. 2020, 12, 546. [Google Scholar] [CrossRef]
- Yim, S.H.L. Development of a 3D Real-Time Atmospheric Monitoring System (3DREAMS) Using Doppler LiDARs and Applications for Long-Term Analysis and Hot-and-Polluted Episodes. Remote Sens. 2020, 12, 1036. [Google Scholar] [CrossRef]
- Hirsikko, A.; O’Connor, E.J.; Komppula, M.; Korhonen, K.; Pfüller, A.; Giannakaki, E.; Wood, C.R.; Bauer-Pfundstein, M.; Poikonen, A.; Karppinen, T.; et al. Observing wind, aerosol particles, cloud and precipitation: Finland’s new ground-based remote-sensing network. Atmos. Meas. Tech. 2014, 7, 1351–1375. [Google Scholar] [CrossRef]
- Wang, L.; Qiang, W.; Xia, H.; Wei, T.; Yuan, J.; Jiang, P. Robust Solution for Boundary Layer Height Detections with Coherent Doppler Wind Lidar. Adv. Atmos. Sci. 2021, 38, 1920–1928. [Google Scholar] [CrossRef]
- Jia, M.; Yuan, J.; Wang, C.; Xia, H.; Wu, Y.; Zhao, L.; Wei, T.; Wu, J.; Wang, L.; Gu, S.Y.; et al. Long-lived high-frequency gravity waves in the atmospheric boundary layer: Observations and simulations. Atmos. Chem. Phys. 2019, 19, 15431–15446. [Google Scholar] [CrossRef]
- Chan, P.W. LIDAR-based turbulence intensity calculation using glide-path scans of the Doppler LIght Detection and Ranging (LIDAR) systems at the Hong Kong International Airport and comparison with flight data and a turbulence alerting system. Meteorol. Z. 2010, 19, 549–563. [Google Scholar] [CrossRef]
- Banakh, V.; Smalikho, I. Lidar Studies of Wind Turbulence in the Stable Atmospheric Boundary Layer. Remote Sens. 2018, 10, 1219. [Google Scholar] [CrossRef]
- O’Connor, A.; Kearney, D. Low Level Turbulence Detection for Airports. Int. J. Aviat. Aeronaut. Aerosp. 2019, 6. [Google Scholar] [CrossRef]
- Tuononen, M.; O’Connor, E.J.; Sinclair, V.A.; Vakkari, V. Low-Level Jets over Utö, Finland, Based on Doppler Lidar Observations. J. Appl. Meteorol. Clim. 2017, 56, 2577–2594. [Google Scholar] [CrossRef]
- Pantillon, F.; Wieser, A.; Adler, B.; Corsmeier, U.; Knippertz, P. Overview and first results of the Wind and Storms Experiment (WASTEX): A field campaign to observe the formation of gusts using a Doppler lidar. Adv. Sci. Res. 2018, 15, 91–97. [Google Scholar] [CrossRef]
- Smalikho, I.N.; Banakh, V.A.; Holzapfel, F.; Rahm, S. Method of radial velocities for the estimation of aircraft wake vortex parameters from data measured by coherent Doppler lidar. Opt. Express 2015, 23, A1194–A1207. [Google Scholar] [CrossRef]
- Nechaj, P.; Gaal, L.; Bartok, J.; Vorobyeva, O.; Gera, M.; Kelemen, M.; Polishchuk, V. Monitoring of Low-Level Wind Shear by Ground-based 3D Lidar for Increased Flight Safety, Protection of Human Lives and Health. Int J. Environ. Res. Public Health 2019, 16, 4584. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Barlow, J.F.; Chan, P.-W.; Fung, J.C.H.; Li, Y.; Ren, C.; Mak, H.W.L.; Ng, E. A Review of Progress and Applications of Pulsed Doppler Wind LiDARs. Remote Sens. 2019, 11, 2522. [Google Scholar] [CrossRef]
- Thobois, L.; Cariou, J.P.; Gultepe, I. Review of Lidar-Based Applications for Aviation Weather. Pure Appl. Geophys. 2018, 176, 1959–1976. [Google Scholar] [CrossRef]
- Huang, J.; Ng, M.K.P.; Chan, P.W. Wind Shear Prediction from Light Detection and Ranging Data Using Machine Learning Methods. Atmosphere 2021, 12, 644. [Google Scholar] [CrossRef]
- Hon, K.K.; Chan, P.W.; Chiu, Y.Y.; Tang, W. Application of Short-Range LIDAR in Early Alerting for Low-Level Windshear and Turbulence at Hong Kong International Airport. Adv. Meteorol. 2014, 2014. [Google Scholar] [CrossRef]
- Chan, P.W. Severe wind shear at Hong Kong International Airport: Climatology and case studies. Meteorol. Appl. 2017, 24, 397–403. [Google Scholar] [CrossRef]
- Chan, P.W.; Lai, K.K.; Li, Q.S. High-resolution (40 m) simulation of a severe case of low-level windshear at the Hong Kong International Airport—Comparison with observations and skills in windshear alerting. Meteorol. Appl. 2021, 28. [Google Scholar] [CrossRef]
- Lee, Y.F.; Chan, P.W. Application of Short-Range Lidar in Wind Shear Alerting. J. Atmos. Ocean. Tech. 2012, 29, 207–220. [Google Scholar] [CrossRef]
- Chan, P.W.; Shun, C.M. Applications of an Infrared Doppler Lidar in Detection of Wind Shear. J. Atmos. Ocean. Tech. 2008, 25, 637–655. [Google Scholar] [CrossRef]
- Hon, K.K.; Chan, P.W. Improving Lidar Windshear Detection Efficiency by Removal of “Gentle Ramps”. Atmosphere 2021, 12, 1539. [Google Scholar] [CrossRef]
- Yoshino, K. Low-Level Wind Shear Induced by Horizontal Roll Vortices at Narita International Airport, Japan. J. Meteorol. Soc. Jpn. 2019, 97, 403–421. [Google Scholar] [CrossRef]
- van Dooren, M.F.; Campagnolo, F.; Sjöholm, M.; Angelou, N.; Mikkelsen, T.; Kühn, M. Demonstration and uncertainty analysis of synchronised scanning lidar measurements of 2-D velocity fields in a boundary-layer wind tunnel. Wind Energy Sci. 2017, 2, 329–341. [Google Scholar] [CrossRef]
- Chan, P.W.; Shao, A.M. Depiction of complex airflow near Hong Kong International Airport using a Doppler LIDAR with a two-dimensional wind retrieval technique. Meteorol. Z. 2007, 16, 491–504. [Google Scholar] [CrossRef]
- Qiu, C.J.; Shao, A.M.; Liu, S.; Xu, Q. A two-step variational method for three-dimensional wind retrieval from single Doppler radar. Meteorol. Atmos. Phys. 2005, 91, 1–8. [Google Scholar] [CrossRef]
- Chan, P.W.; Hon, K.K.; Shin, D.K. Combined use of headwind ramps and gradients based on LIDAR data in the alerting of low-level windshear/turbulence. Meteorol. Z. 2011, 20, 661–670. [Google Scholar] [CrossRef]
- Woodfield, A.; Woods, J. Wind Shear from Head Wind Measurements on British Airways B747-236 Aircraft; Royal Aircraft Establishment Bedford: Bedford, UK, 1981. [Google Scholar]
- Woodfield, A.A.; Woods, J.F. Worldwide Experience of Wind Shear During 1981–1982; Royal Aircraft Establishment Bedford: Bedford, UK, 1983. [Google Scholar]
- Wang, C.; Xia, H.; Shangguan, M.; Wu, Y.; Wang, L.; Zhao, L.; Qiu, J.; Zhang, R. 1.5 μm polarization coherent lidar incorporating time-division multiplexing. Opt. Express 2017, 25, 20663–20674. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Wavelength | 1.5 μm |
| Pulse Energy | 300 μJ |
| Diameter of telescope | 80 mm |
| Repetition frequency | 10 kHz |
| Diameter of telescope | 80 mm |
| Temporal resolution | 0.2–1 s |
| Spatial resolution | 30 m |
| Angle accuracy | 0.01° |
| Maximum range | 13 km |
| Azimuth scanning range | 0–360° |
| Zenith scanning range | 0–90° |
| Windshear Threshold | POD (%) | PoTA (%) |
|---|---|---|
| 50 | 100 | 12.69 |
| 100 | 100 | 7.77 |
| 200 | 100 | 3.51 |
| 300 | 100 | 1.77 |
| 400 | 100 | 1.31 |
| 500 | 100 | 0.81 |
| 600 | 90 | 0.69 |
| 700 | 80 | 0.55 |
| 800 | 80 | 0.34 |
| 900 | 70 | 0.22 |
| 1000 | 70 | 0.16 |
| Time (UTC) | Runway, Position, Height (Crew) | Windshear Alert from Lidar |
|---|---|---|
| 28 April, 15:55 | 35L, 3 km, 200 m | 35L, 1.9 km–3.7 km (2MF), −9.9 m/s |
| 28 April, 15:58 | 35L, Runway | 35L, RWY, −8.2 m/s |
| 28 April, 16:01 | 35L, Runway | 35L, RWY, −8.7 m/s |
| 6 May, 5:50 | 35L, 3 km, 150 m | 35L, 1.9 km–3.7 km (2MF), −8.2 m/s |
| 6 May, 8:37 | 01L, 3 km, 150 m | 01L, 1.9 km–3.7 km (2MF), −8.6 m/s |
| 6 May, 11:05 | 35L, Runway | 35L, RWY, −8.3 m/s |
| 26 May, 10:33 | 01L, Runway | 01L, RWY, −7.7 m/s |
| 26 May, 10:34 | 01L, Runway | 01L, RWY, −8.9 m/s |
| 26 May, 10:40 | 01L, 5 km,250 m | 01L, 3.7 km–5.6 km (3MF), −9.6 m/s |
| 5 June, 11:54 | 01L, 4 km,200 m | 01L, 3.7 km–5.6 km (3MF), −15.9 m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, J.; Su, L.; Xia, H.; Li, Y.; Zhang, M.; Zhen, G.; Li, J. Microburst, Windshear, Gust Front, and Vortex Detection in Mega Airport Using a Single Coherent Doppler Wind Lidar. Remote Sens. 2022, 14, 1626. https://doi.org/10.3390/rs14071626
Yuan J, Su L, Xia H, Li Y, Zhang M, Zhen G, Li J. Microburst, Windshear, Gust Front, and Vortex Detection in Mega Airport Using a Single Coherent Doppler Wind Lidar. Remote Sensing. 2022; 14(7):1626. https://doi.org/10.3390/rs14071626
Chicago/Turabian StyleYuan, Jinlong, Lian Su, Haiyun Xia, Yi Li, Ming Zhang, Guangju Zhen, and Jianyu Li. 2022. "Microburst, Windshear, Gust Front, and Vortex Detection in Mega Airport Using a Single Coherent Doppler Wind Lidar" Remote Sensing 14, no. 7: 1626. https://doi.org/10.3390/rs14071626
APA StyleYuan, J., Su, L., Xia, H., Li, Y., Zhang, M., Zhen, G., & Li, J. (2022). Microburst, Windshear, Gust Front, and Vortex Detection in Mega Airport Using a Single Coherent Doppler Wind Lidar. Remote Sensing, 14(7), 1626. https://doi.org/10.3390/rs14071626