1. Introduction
In recent years, Earth system science has attracted wide attention. Considerable effort has been made to understand and model the Earth’s climate. Previous studies have revealed that there is a high degree of anisotropy for reflected light and some climate parameters such as the Bond albedo are of bidirectional property [
1,
2,
3]. Sufficient angular sampling is beneficial to the inversion of atmospheric parameters. For example, in the Earth’s energy budget field, the development of the CERES has greatly enriched the angular sampling coincident with other sensors for Earth’s energy budget [
4,
5,
6,
7]. In this sense, an Earth observation platform with rich angular sampling can provide additional angular sampling coincident with current satellite constellations, which will greatly advance our understanding of Earth’s climate.
Since the 1960s, various Earth observation platforms have been developed. Among them, the Earth-orbiting satellites such as low orbit satellites (LEO satellites), geostationary orbit satellites (GEO satellites), and DSCOVR satellite located at the Sun–Earth Lagrange L1 point (L1 satellite) have provided us with a large amount of valuable Earth observation multiangle data [
8]. Their angular samplings are different with respect to the observation geometry [
9]. The first LEO satellites were expected to provide nadir views for a given terrestrial surface. Since then, the development of multiangle sensors has improved their angular sampling capabilities [
10]. Due to the limitation of orbital altitude, they mainly provide data on a smaller spatial scale. To this extent, GEO and L1 satellites can achieve hemisphere-scale Earth observation. Since the GEO satellites and the Earth are in a relatively fixed geometry, their viewing angles remain unchanged [
11,
12]. Contrariwise, the L1 satellite is located at the L1 point of the Sun–Earth Lagrange, where it can continuously observe the sunward side of the Earth [
13]. This means that the angles of the incoming light and the viewing direction often coincide for a given terrestrial surface. Furthermore, a new miniaturized satellite named CubeSat has been proposed and developed as a standard platform for technology demonstration and scientific instrumentation in recent years [
14]. It will provide the opportunity to enable missions that a larger satellite could not accomplish due to its advantages of development cost and time [
15]. The construction of a satellite constellation has the potential to provide us with high temporal resolution global multiangle observations, which will benefit the observation of Earth’s highly dynamic system, such as the weather system [
16,
17]. For example, a constellation of CubeSats in GEO and a special polar-geosynchronous type orbit named Molniya can acquire real-time global natural color imagery on a time-scale of 5 min, which will allow for significant multiangle coverage [
16].
In addition to the existing Earth observation platforms, a Moon-based platform is proposed as a novel Earth observation platform to acquire continuous multiangle and hemispheric-scale observation data [
18,
19,
20]. It has specific angular sampling characteristics due to its peculiar observation geometry [
21]. First, because of the large distance between the Earth and Moon, the sensor can observe the Earth disc, and thus, the adjacent observed points in the hemispherical view have continuous observational angles. Second, such a long-term observation is conducive to the acquisition of multiangle data, which is important for revealing the anisotropic characteristics of terrestrial surfaces. Third, the variable orbital inclination of the lunar orbit will lead to the movement of lunar nadir, which not only benefits global coverage, particularly for polar regions but also increases the diversity of angular combinations. In this sense, a Moon-based platform can complement additional angular sampling observations coincident with existing satellites observations, which will enhance the Earth-based sensor constellation.
In order to use a Moon-based platform, the first step is to model its observation geometry. The most fundamental method is to unify the Moon-based sensor, Sun, and observed point in the same coordinate system based on the planetary ephemerides. Planetary ephemerides mainly provide the positions and attitudes of the Moon and Sun for Moon-based Earth observations. Many types of planetary ephemerides have been published by different organizations [
22,
23,
24]. The development ephemeris (DE) established by the Jet Propulsion Laboratory is one of the most widely used ephemeris in previous studies, and there are many versions of this ephemeris (e.g., DE405, DE410, DE421, and DE430) [
24]. Based on the DE, the lunar and solar positions and attitudes at any time can be calculated using the Chebyshev interpolation, as demonstrated in various pioneering studies. Guo et al. [
21] constructed an observation geometry based on DE 421 and discussed the characteristics and scientific objectives of Moon-based Earth observation. Liu et al. [
25] analyzed the geometrical characteristics of Moon-based Earth observations using an ellipsoid model based on DE430. Shen et al. [
26] used DE 405 and DE 421 data and systems tool kit numerical analysis data to simulate the observation geometry. Ren et al. [
27] analyzed the geometric characteristics and coverage of Moon-based Earth observations in the electro-optical region based on DE430. Ye et al. [
28] constructed a geometric Moon-based platform model based on DE430 and analyzed the observation scope and spatial coverage. Xu et al. [
29] simulated the spatiotemporal coverage of Moon-based synthetic aperture radar (SAR) based on DE 430 and provided guidelines for the optimal site selection for Moon-based SAR. Huang et al. [
30] analyzed the spatiotemporal characteristics of Moon-based Earth observation based on DE430. Wang et al. [
31] compared the observation duration of the two polar regions of Earth from four specific sites on the Moon-based DE 430. Deng et al. [
32] analyzed the global spatiotemporal sampling characteristics of Moon-based Earth observation based on DE430. Apart from very high-precision planetary ephemerides, analytical models are available for constructing the observation geometry. Fornaro et al. [
33] developed an observational geometry SAR model based on the simplified Keplerian orbital model. Moccia and Renga [
34] constructed dynamic models for a Moon-based SAR based on the Ephemerides Lunaires Parisiennes theory (ELP 2000), which is a lunar semi-analytic theory. The results of these studies have provided valuable insights into the construction of observation geometries for observational angles based on an analytic model. In addition, because the analysis of angular combination characteristics does not require very high-precision solar and lunar positions, the introduction of simple analytic models will make preliminary studies more affordable. Thus, it is of interest to model the observation geometry based on analytical expressions of the Moon’s and Sun’s orbits.
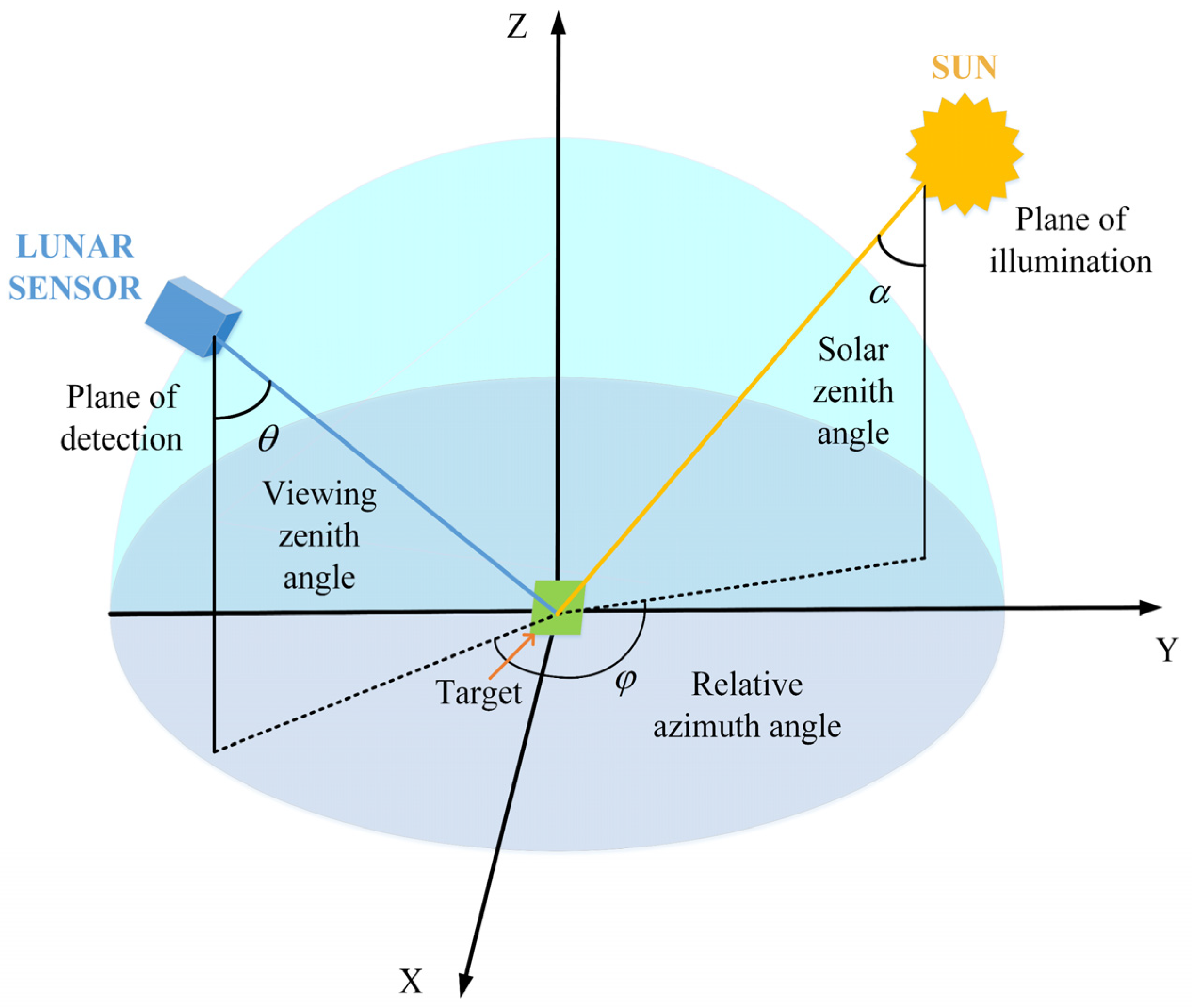
Some scholars have initially carried out pioneering research on the characteristics of angular sampling for a Moon-based platform. Guo et al. [
35] and Sui et al. [
36] adopted four types of observation angular parameters, that is, the viewing zenith angle, solar zenith angle, viewing azimuth angle, and solar azimuth angle, to describe light incident from the Sun and reflected from surface features. In contrast, Ye et al. [
37] reduced the four angular parameters to three parameters by introducing the relative azimuth angle, which is the difference between the viewing and solar azimuth angles. Compared with the four parameters, the relative azimuth angles of the three parameters can be used to directly describe the relative positions of a Moon-based sensor, the Sun, and the observed point. However, few studies have focused on the effect of time sampling interval on the angular combination richness. Ideally, a Moon-based sensor would observe the Earth and collect the angular sampling data continuously. However, in fact, the sensor observes the Earth at a certain time sampling interval. The selection of time sampling intervals will greatly affect the sampling of observations and thus the richness of angular combination. A large time sampling interval will result in the lack of effective angular combination coverage, whereas a small time sampling interval will lead to redundancy in the angular sampling. Furthermore, the effect of the time sampling interval on the angular combination differs for different observed points. Therefore, it is necessary to study the effect of the time sampling interval on the angular combination characteristics for Moon-based Earth observations with respect to different observed points.
The aims of this study were to explore the angular combination characteristics of a Moon-based platform and the effect of time sampling interval for different observed points. We derived an analytical equation for the observational angles from the orbital elements of the Moon and Sun. We also proposed an angular combination number index (ACNI), which can be used to characterize the performance of the angular combination. Finally, the effects of the time sampling interval for different observed points are revealed.
3. Results
The theoretical framework for analyzing the angular combination of observed points was introduced in
Section 2. In this section, we mainly describe how the experiments were conducted to reveal the angular combination characteristics and effects of the time sampling interval. We first compare the results derived from our proposed method with planetary ephemerides. Subsequently, the angular combination distributions and their variations over different time sampling intervals are presented for different observed points. Finally, the effects of the time sampling intervals by using the angular combination performance index are analyzed in detail. Note that the coordinated universal time (UTC) is adopted.
3.1. Validation
To validate the analytic coordinates of the Sun and Moon, our results were compared with planetary ephemerides. As mentioned in
Section 1, the DE is one of the main streams of planetary ephemerides. The DE430 was selected because of the improvements based on the use of additional lunar laser ranging data and improved lunar gravity field for the lunar orbit and attitude. For the lunar position, the coordinates based on DE 430 were tabulated as the origin at the Earth barycenter, that is, the geocentric celestial reference system. The lunar attitude is expressed by three Euler angles based on the DE 430 [
24].
We assumed that the sensor was equipped at (0°, 0°) on the Moon and the observed point was located at (0°, 0°) on the Earth. Notice that the mean orbital elements of the Sun and Moon are adopted with respect to the Earth and the ecliptic for decades around the year 2000 [
38].
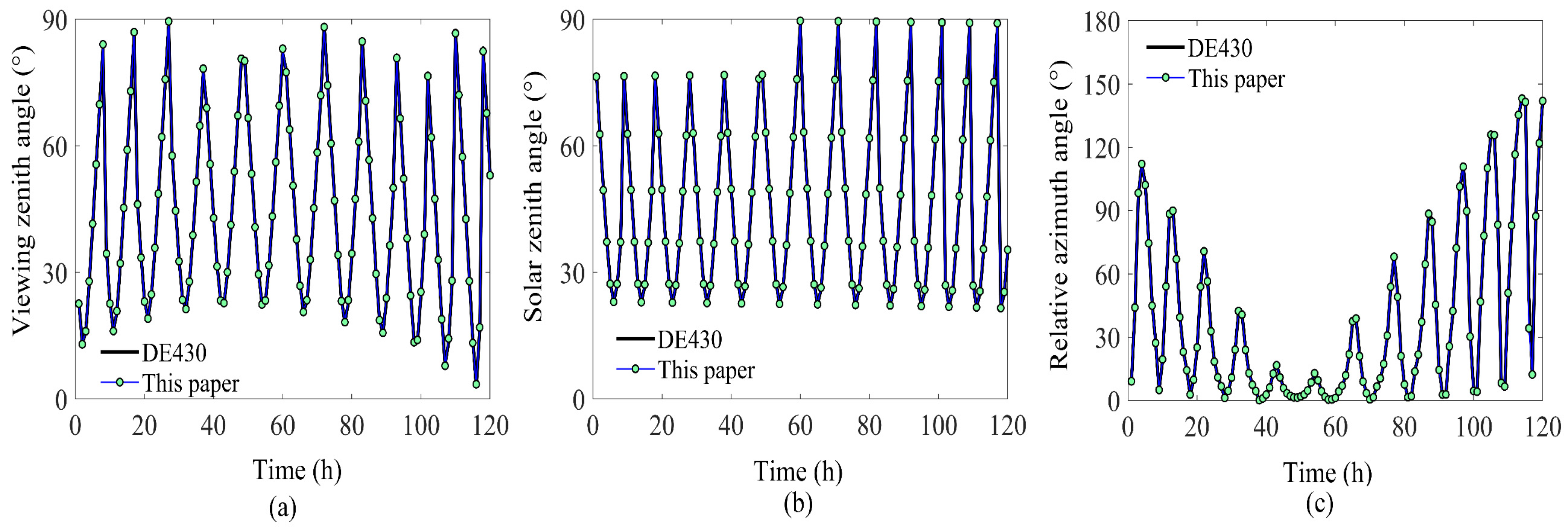
Figure 2 shows comparisons between the results derived from DE430 and our method during one orbital period. Note that the orbital period refers to the period it takes the Moon to complete one revolution relative to the Sun (a synodic month). Considering the relative azimuth angle is defined as the angle between the Moon and Sun, the
x-axis represents the time when the observed point was simultaneously visible by the Moon and Sun. The
y-axis represents the results for the three observational angles. The blue and orange lines represent the angles calculated using DE430 and our proposed method, respectively. The results derived from our proposed method almost coincide with those obtained from DE430, within 1° of error, verifying the correctness and validity of our analytical method.
3.2. Variation Analysis of the Angular Combination Distribution
The angular combination distribution refers to the coverage of the three observational angles. For an Earth observation platform, the angular combination distribution characterizes the capability of its angular sampling. For a Moon-based platform, the angular combination distribution differs at different observation points because of the orbital characteristics of the Moon and Sun. The orbits of the Moon and Sun can be parameterized as the distance from the Earth and the position of nadirs. It can be inferred from Equations (21)–(27) that the distance does not significantly influence the zenith angles and relative azimuth angle. Hence, the movement of lunar and solar nadirs are the primary factors affecting the angular combination distribution. Actually, neither the Sun nor the Moon has a fixed orbital inclination. As the Earth’s rotational axis is inclined about 23°27′ with respect to the ecliptic plane, the Sun’s nadir varies between the 23°27′ N and 23°27′ S over one year. The Moon’s inclination also changes. As the Moon is orbiting the Earth, the plane of the Moon’s orbit is tilted (around 5°9′) with respect to the ecliptic plane. Thus, the lunar nadir moves between the southern and northern hemispheres for one orbital period. It is clear that the Moon’s maximum and minimum declination vary because the mean ecliptic longitude of the ascending node continuously recedes westward along the ecliptic. It recedes about 19° westward every year over an 18.6-year period. Consequently, when the mean ecliptic longitude of the ascending node is 0°, the ascending node coincides with the vernal equinox, and thus the obliquity of the ecliptic reaches a maximum. In contrast, when the mean ecliptic longitude of the ascending node is 180°, the descending node and vernal equinox coincide, and the obliquity of the ecliptic reaches a minimum. Therefore, the extreme value of the Moon’s nadir varies roughly from about 18° to 28° over an 18.6-year period. Variations in the Moon’s and Sun’s nadirs lead to differences in the angular combination distribution for different observed points. In general, as the Moon’s and Sun’s nadirs mainly move within the mid–low latitude zone, the viewing and solar zenith angle of observed points in this region can reach a maximum of 90° and thus range from 0° to 90°. For the solar zenith angle, its minimum varies with the seasons because of the movement regularity of the Sun’s nadir, and the maximum difference is around 23°. For the viewing zenith angle, the difference of its maximum can reach 10° under the two extreme cases of 0° and 180° for mean ecliptic longitude of ascending node. The relative azimuth angle is defined only when the observed points can be visible by the Moon and Sun simultaneously. Thus, it is mainly affected by the Moon phase angle. The moon phase refers to the part of the Moon that is illuminated by the Sun and can also be seen on the Earth. It represents the relative position of the Moon, Sun, and Earth. Specifically, it mainly affects the difference between the longitude of the Sun’s and Moon’s nadir, and the period of the moon phase angle is a synodic month.
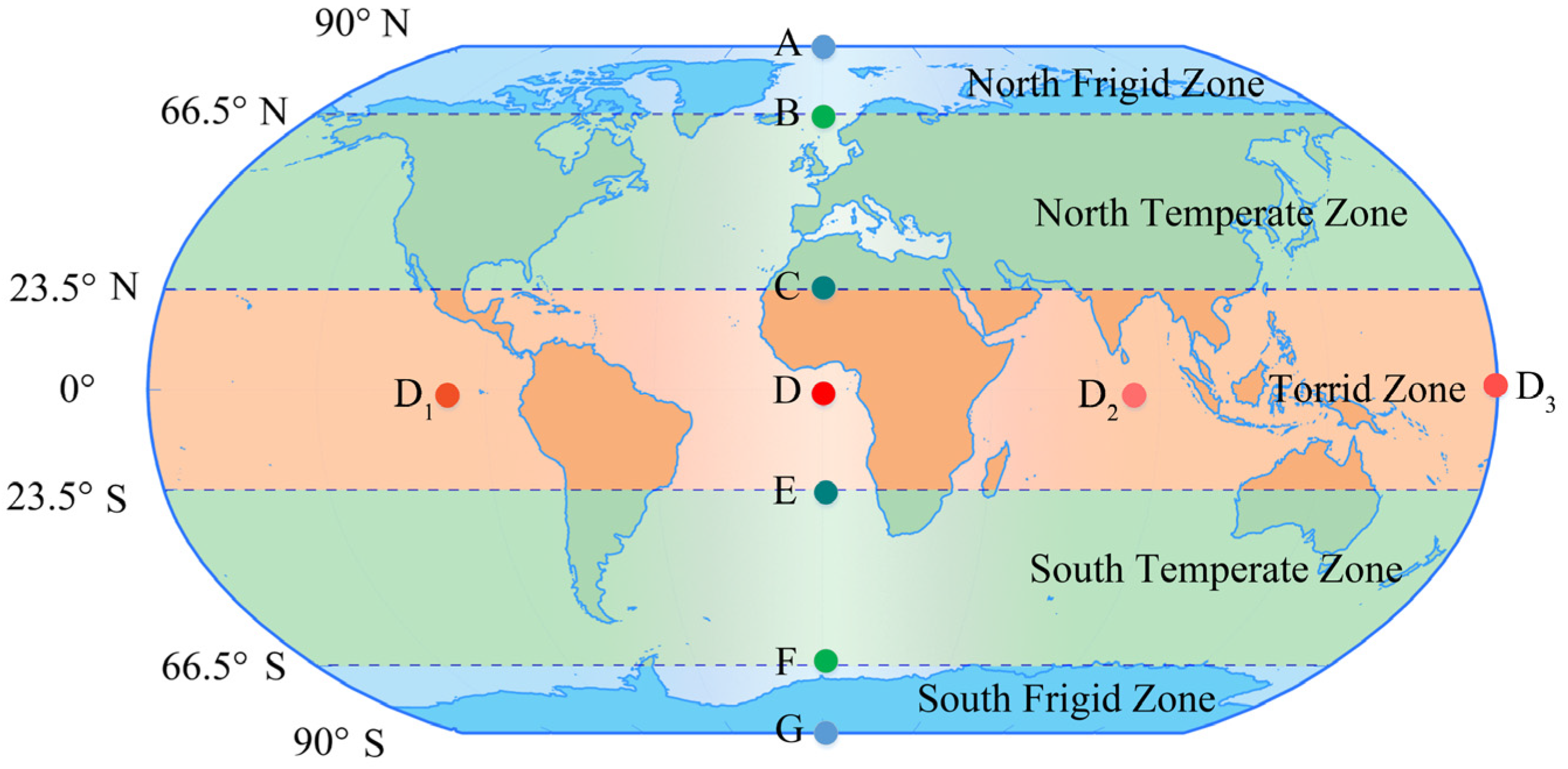
To reveal differences in the distribution of the angular combination for different observed points, we compared the latitudinal and longitudinal variations for selected points. As shown in
Figure 3, ten observed points were selected at different latitudes and longitudes for experiments. Points A–G are on the Earth’s central meridian along the longitude, and Points D, D
1, D
2, and D
3 are on Earth’s equator along the latitude. Note that the observation period of the experiments in this study was set to 18.6 years according to the periodicity of the lunar nadir.
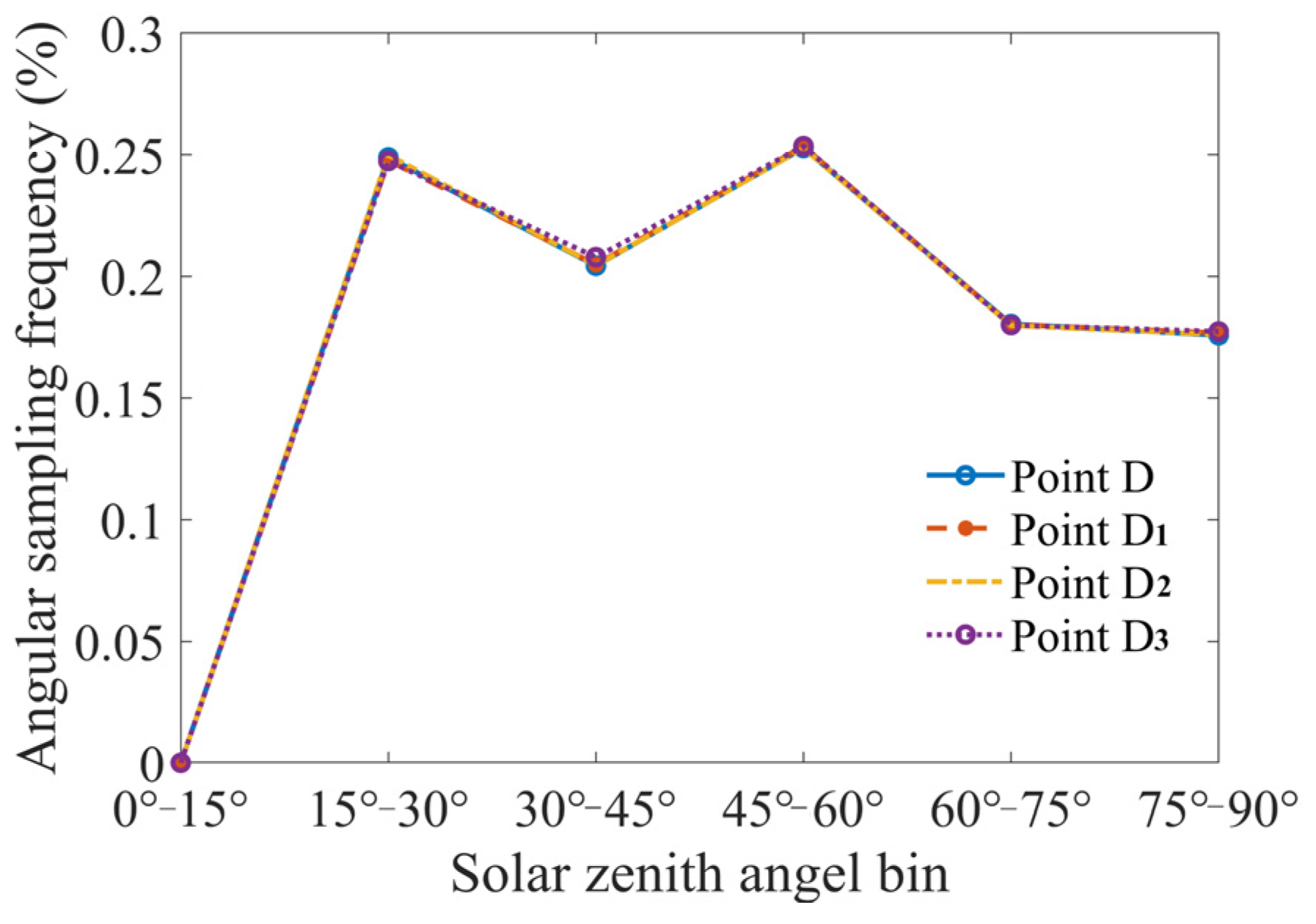
Figure 4 shows the 18.6-yearly latitudinal angular sampling frequency for different longitudes. We divided the solar zenith angle with 15° interval and calculated the angular sampling frequency in each solar zenith angle bin. The results show that all the D points have the same angular frequency distribution. Therefore, in general, the longitude of the observed point has no significant effect on the angular combination distribution over a period of 18.6 years.
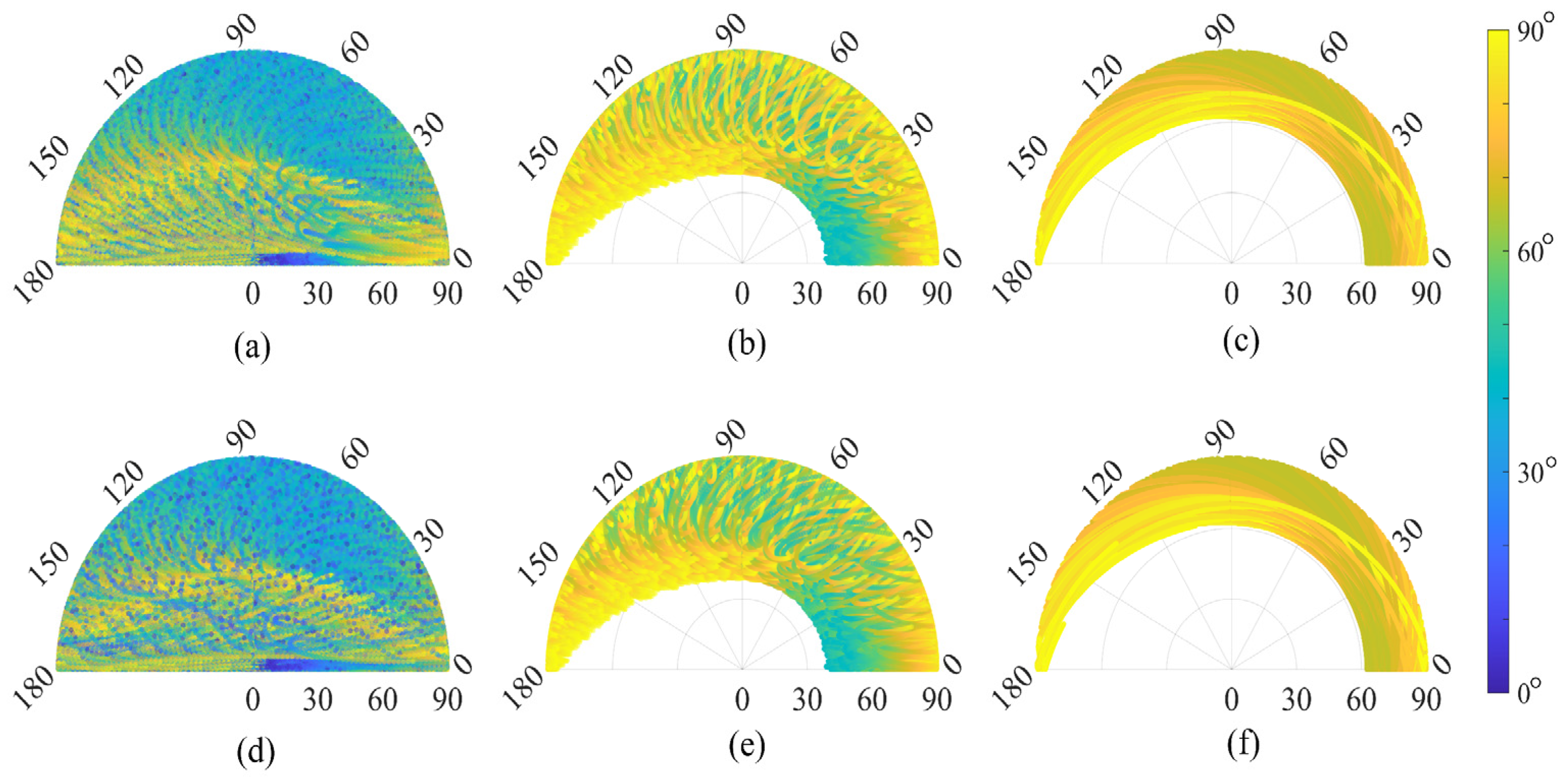
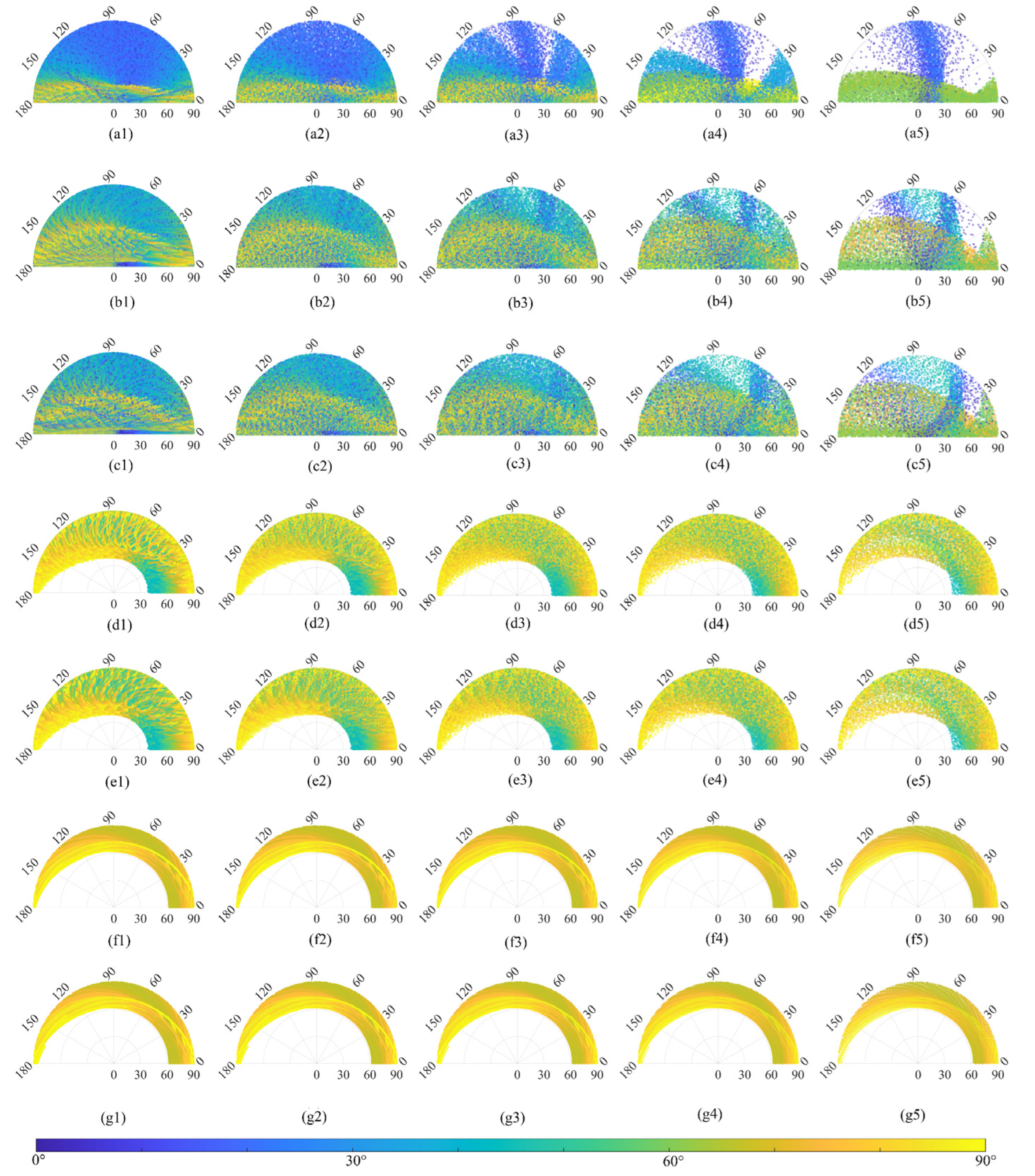
Figure 5 shows the distributions of the angular combination at different latitudes. The distributions of the longitudinal angular combination differ at different latitudes because both the Moon’s and Sun’s nadir move along the latitude direction. In addition, a slight difference was observed between the observed points, which are symmetrical around the equator. For example, Point C is similar to Point E with respect to the pattern of angular distribution. As expected, compared with the observed points in the high latitude zone, the distribution of the angular combination is more abundant for the observed points in the mid–low latitude zone. This further advances our understanding of the angular characteristics for Moon-based Earth observations. To exploit the effect of the time sampling interval, we further analyzed the variations in the distribution of the angular combination over different time sampling intervals for different observed points.
Figure 6 shows the variations in the distribution of the angular combination over time sampling intervals of 10 min, 30 min, 1 h, 2 h, and 4 h. The results show that the time sampling interval significantly affects the angular combination distribution. More specifically, for observed points in the mid–low latitude zone, an increase in the time sampling interval results in a larger loss of coverage for certain angular combinations. Thus, the sensitivities of different angular combinations to the time sampling interval differ. In conclusion, the latitude of the observed point affects the angular combination distribution, and an increase in the time interval will result in the loss of certain angular combinations.
3.3. Effect of the Time Sampling Interval on the Angular Combination
As described in
Section 3.2, we found that the angular distributions show differences for different observed points, which will be significantly affected by the selection of time sampling interval. This raises the question of the difference in the angular coverage ratio between different observed points and how much an increased time sampling interval will affect the diversity of angular combinations. To answer these questions, we propose the ACNI and its ratio to characterize and quantify the performance of angular combination. One critical step is to discretize the combination of angles according to the bin size. When the ratio of index is a maximum of 1, the sensor can cover all angular combination bins. In contrast, when the ratio is smaller, the sensor’s angular samplings are insufficient. Its minimum is 0, indicating that the observed points cannot be observed. The experiments were conducted assuming the sensor was at (0°, 0°) on the lunar surface, and the observation period was set as 18.6 years to remove the effect of the observation period. Considering the angular resolution of the angular distribution model for the top-of-atmosphere radiative flux calculation, the angular resolution was selected to be 5° [
6]. Accordingly, there are 18 bins for the viewing and solar zenith angles and 36 bins for the relative azimuth angle. That means, in Equation (29), the values of
p,
q, and
m are 18, 18, and 36, respectively. Thus, the total number of angular combinations for the three observational angles is 11,664.
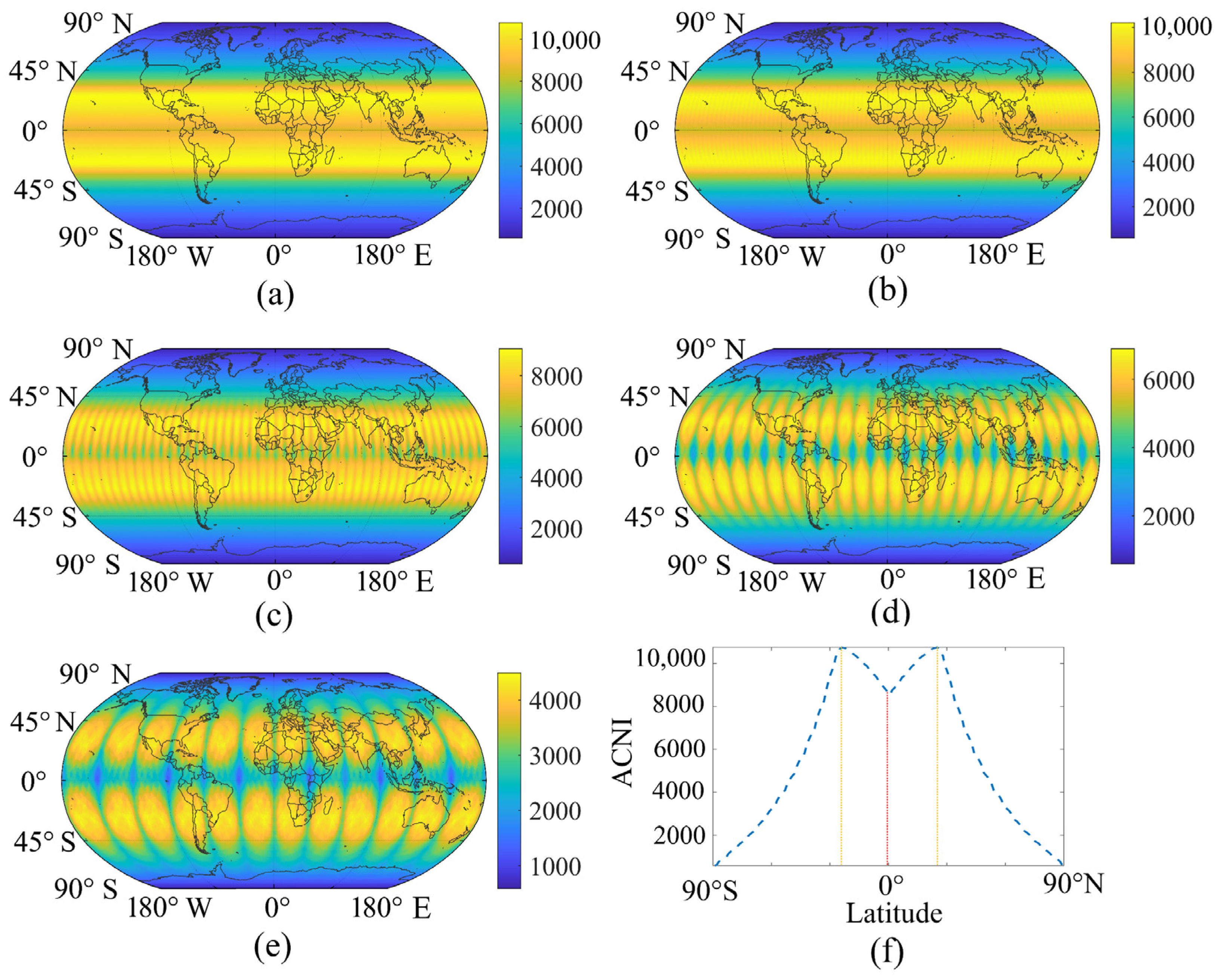
Figure 7 shows the 18.6-yearly variations over time sampling intervals of 10 min, 30 min, 1 h, 2 h, and 4 h. The values in the
Figure 7 and
Figure 8 represent the numbers of angular combinations and have no physical unit. As expected, the results in
Figure 6a appear to be symmetrical around the Earth’s equator and are consistent at the same latitude. This further supports that the angular combination is significantly affected by the latitude of the observed point, whereas the longitude has no significant influence. The angular combination is relatively abundant in the region between 30° N and 30° S, and the values of ACNI vary from approximately 9000 to 10,800, as shown in
Figure 7a. Thus, more than 78% of the angular combination can be covered by a Moon-based sensor. The index of observed points in the high latitude zone, however, ranges roughly from 2000 to 8000. The observed points in the polar regions have the smallest index value (approximately 2000), regardless of the time sampling interval, although they have the longest continuous observation duration. Therefore, the values of the index clearly vary with the latitudes of observed points, as shown in
Figure 7f. The
x-axis represents the latitude of the observed points, and the
y-axis represents the value of this index. The two yellow lines correspond to these two latitude lines with the most abundant angular combination sampling, and the red line represents the latitude of the equator index. The angular coverage ratio of the observed point at the equator is 15% lower than the case of these two latitudes lines. Another important issue is the effect of the time sampling interval. Based on a comparison of the four subfigures shown in
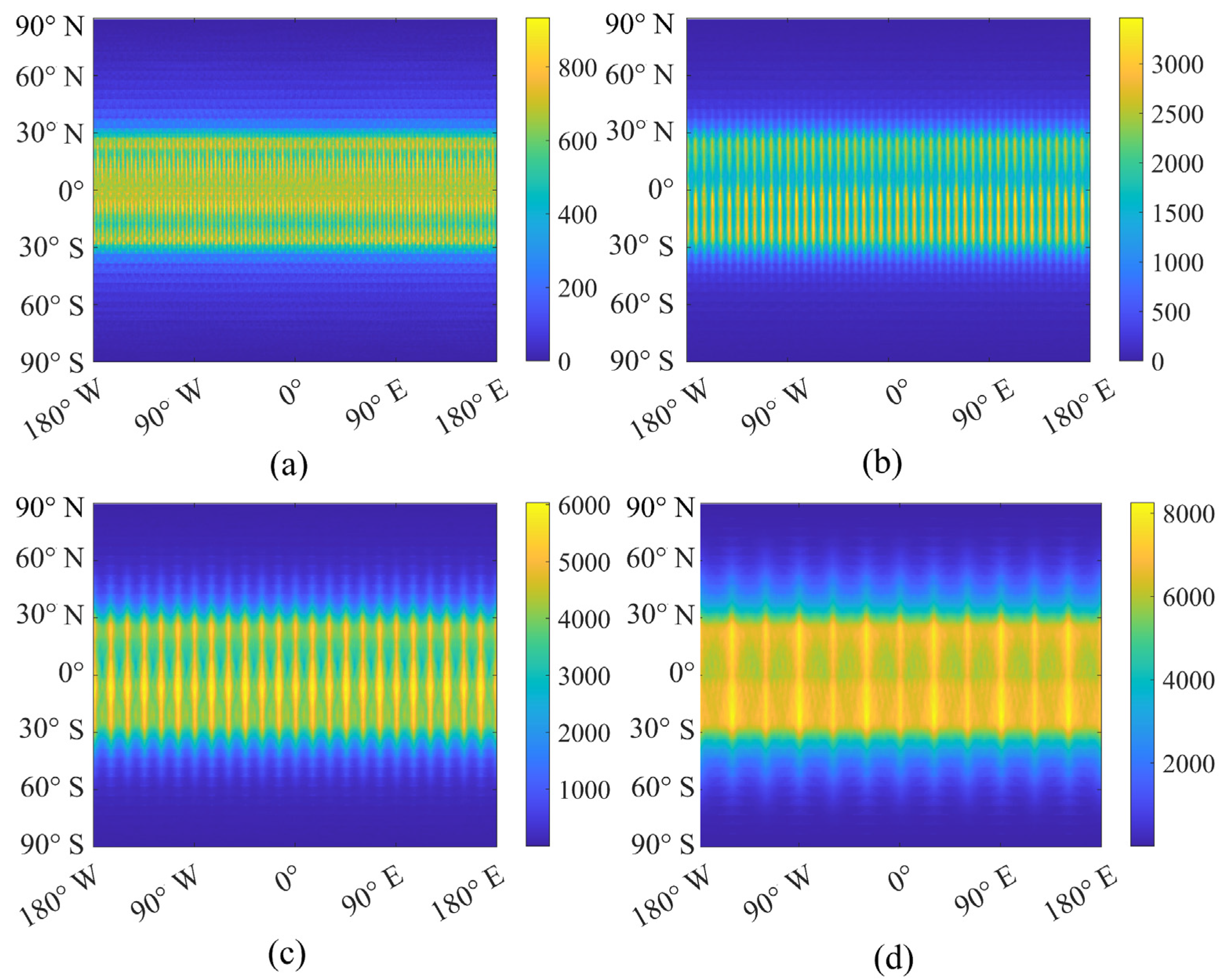
Figure 6, an increase in the time sampling interval will lead to the loss of consistency at the same latitude, and the pattern in the mid–low latitude zone gradually presents as a scattered petal shape. Because of the apparent “gaps,” the results no longer appear horizontally striped. Interestingly, the number of gaps and time sampling interval are negatively linearly correlated. When the time sampling interval was 1, 2, and 4 h, 48, 24, and 12 gaps were presented, respectively. This is because a larger time sampling interval means more sparse observations. As the Moon orbits the Earth, when the time sampling interval increases, the samples are decreased along the longitude uniformly. Consequently, gaps are presented with increased time sampling intervals, and a larger time sampling interval leads to a larger gap. To evaluate the difference between different time sampling intervals, we calculated a difference map during an 18.6-year period, as shown in
Figure 8. The results over a time sampling interval of 10 min were used as the reference map. The results show that the difference of angular coverage presents regular variations and time sampling interval has a larger effect on the angular combination of the observed points in the mid–low latitude zones and latitude ranges from around 30° N to 30° S. To express the trend more clearly,
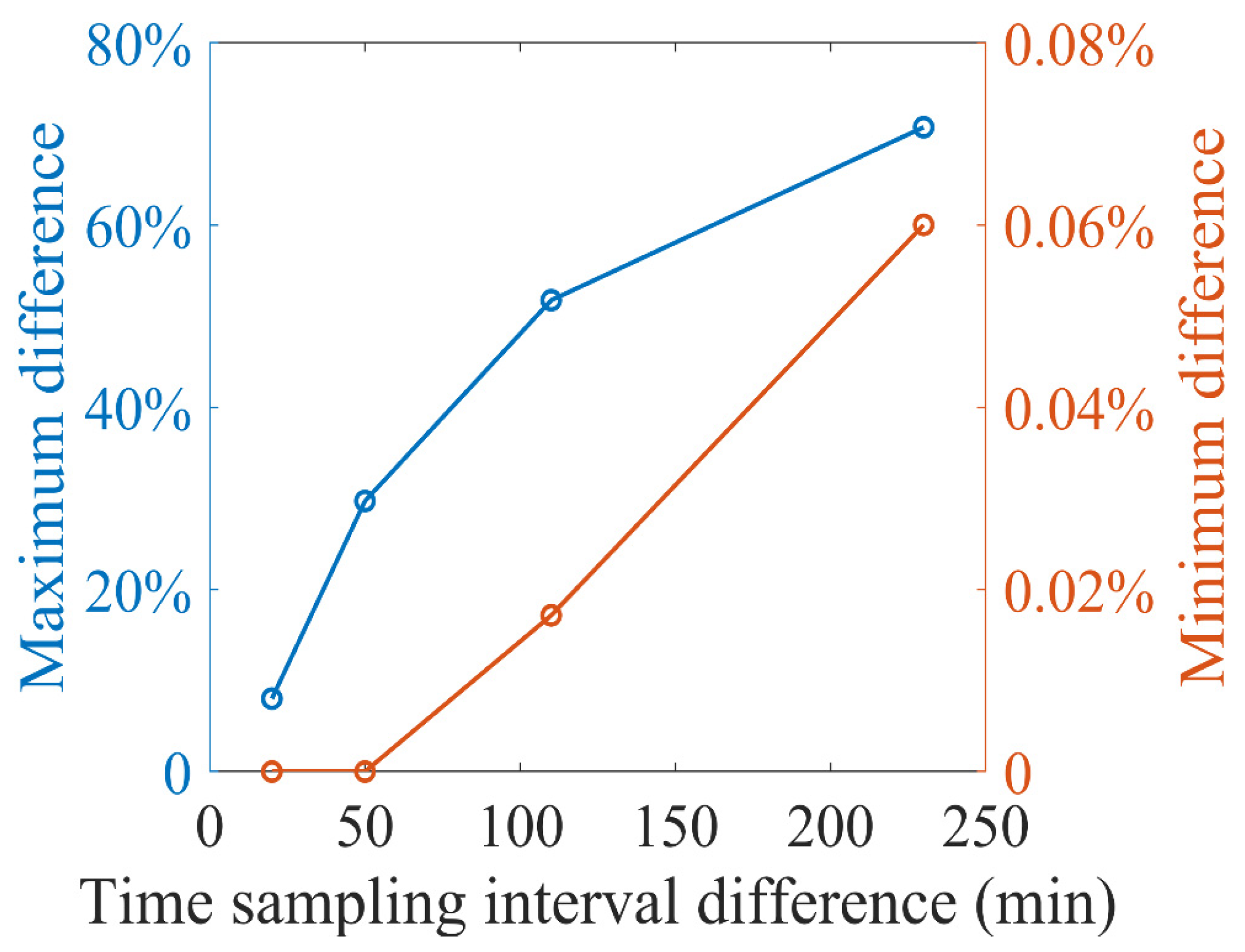
Figure 9 shows the maximum and minimum variations of the ACNI ratio difference with increasing time sampling interval differences. The
x-axis represents the difference between the time sampling interval and 10 min. The blue line represents the maximum difference of the index, and the orange line is the minimum difference. When the time sampling interval increases from 10 min to 2 h, the maximum loss reaches 50% in the mid–low latitude zone, whereas the minimum loss in the high latitude zone is less than 0.02%. When the time sampling interval increases to 4 h, the maximum loss rate reaches 70%, and the minimum loss rate is about 0.06%.
As mentioned in the
Section 1, the angular combination characteristics of the Moon-based platform differ from the traditional satellites.
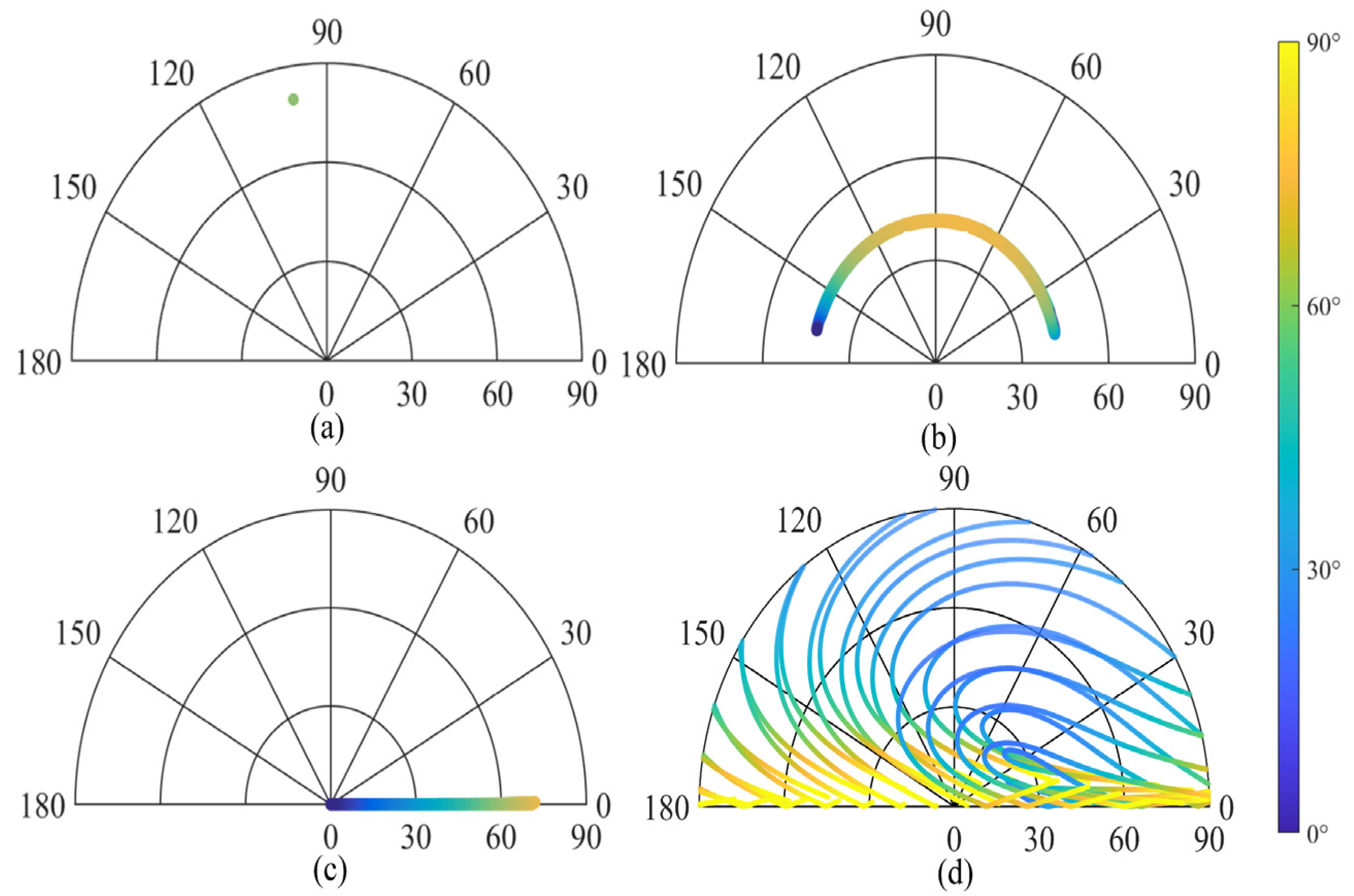
Figure 10 shows the angular sampling of LEO, GEO, L1 satellites, and Moon-based platform over an orbital period. The time sampling interval is 1 min, and the Earth location is assumed at (0°, 0°). The results show that the LEO satellite samples sparsely due to the limitation of orbital altitude and field of view. The solar zenith angles of the GEO/L1 satellites can almost cover from 0° to 90°. They mainly lack the corresponding view zenith angle (GEO satellite) or relative azimuth angle (L1 satellite) sampling. To quantify this difference, we further simulated the angular sampling of hemispheric-scale observation platforms from global observed points over 18.6 years based on ACNI. To eliminate the effect of time sampling interval, it is set to 1 h in all cases. We compared all observed points and calculated the largest and smallest ACNI values and their ratios. The comparison results are tabulated in
Table 2. For the GEO satellite, limited by the fixed viewing direction, its maximum ACNI value is only 372, and the maximum ratio is 3.19%. Because it always “stares” at the same side of the Earth in a fixed direction, some observed points cannot be observed, and thus the minimum ACNI is zero. For the special L1 satellite, because of its extremely high orbital altitude, it can achieve global coverage. Due to its special position of the Sun–Earth L1 point, the solar direction and viewing direction of the observed point, however, almost coincide. Consequently, the ACNI maximum is 67, and the ACNI minimum is 9. For a Moon-based platform, its maximum ACNI is 9063, which accounts for 77.7%. The minimum ACNI is 596, accounting for 5.11%. The angular sampling results benefit from its variable orbital inclination and altitude. In this sense, lunar observations can provide unique and continuous angular sampling coincident with other satellite observations.
In general, the ACNI can be used to effectively characterize variations in the angular combination. Through experiments, we can determine the magnitude of the difference of the angular combination and the extent of the impact of the time sampling interval with respect to different observed points. We found that the two highest ACNI lines correspond to two latitude lines, which indicate the positions of the observed points with the most abundant angular combination. The angular coverage ratio of observed points at the equator is 15% lower than the case of these two latitudes lines. The time sampling interval has different effects on different observed points, with a greater effect on the observed points in the mid–low latitude zone. When the time sampling interval increases from 10 min to 2 h, the maximum loss of angular combinations reaches 50% for the observed points in the mid–low latitude zone, whereas the minimum loss in the high latitude zone is less than 0.02%. These results provide guidance for selecting time sampling intervals for Moon-based Earth observations with respect to the angular combination performance.
4. Discussion
Different from traditional artificial satellites, a Moon-based platform is equipped with Earth’s natural satellite. Our study mainly focuses on the characteristics of the angular combination of Moon-based Earth observations. The observational angles are mainly affected by the positions of the observed point, solar, and lunar nadirs. Thus, we directly derived the observational angles from the analytical orbits of the Moon and Sun. Based on the observational angular model, an ACNI was proposed to characterize the angular performance. Furthermore, we analyzed the effect of the observed point’s position and time sampling interval on the angular combination, which is beneficial for selecting observed points with optimal observation angle combinations and an appropriate time sampling interval. When the region of interest is at mid–low latitudes, a smaller sampling interval should be selected to avoid loss of the angular combination coverage. In contrast, if the region is at high latitude, a larger time sampling interval can minimize redundant observations while ensuring minimal angular combination coverage losses.
The angular sampling characteristic of an observation platform depends on its observation geometry. As shown in
Table 2, the GEO satellite has continuous solar angles and constant viewing angles. On the contrary, the L1 satellite has continuous viewing angles and a constant relative azimuth angle. The Moon, as the sole natural satellite, always faces the Earth on the same side because of the tidal lock. As the Earth rotates, a Moon-based sensor can obtain varied and continuous observational angles on a hemispheric-scale view (
Figure 4,
Figure 5 and
Figure 6). Additionally, the Moon’s orbital inclination and altitude are variable. Therefore, a Moon-based sensor can obtain abundant angular combination sampling. In this sense, a Moon-based platform has continuous viewing and solar observational angles, which can complement angular sampling observations from existing satellites.
As can be inferred from the results, the time sampling interval has a different effect on the angular combination for different observed points. From
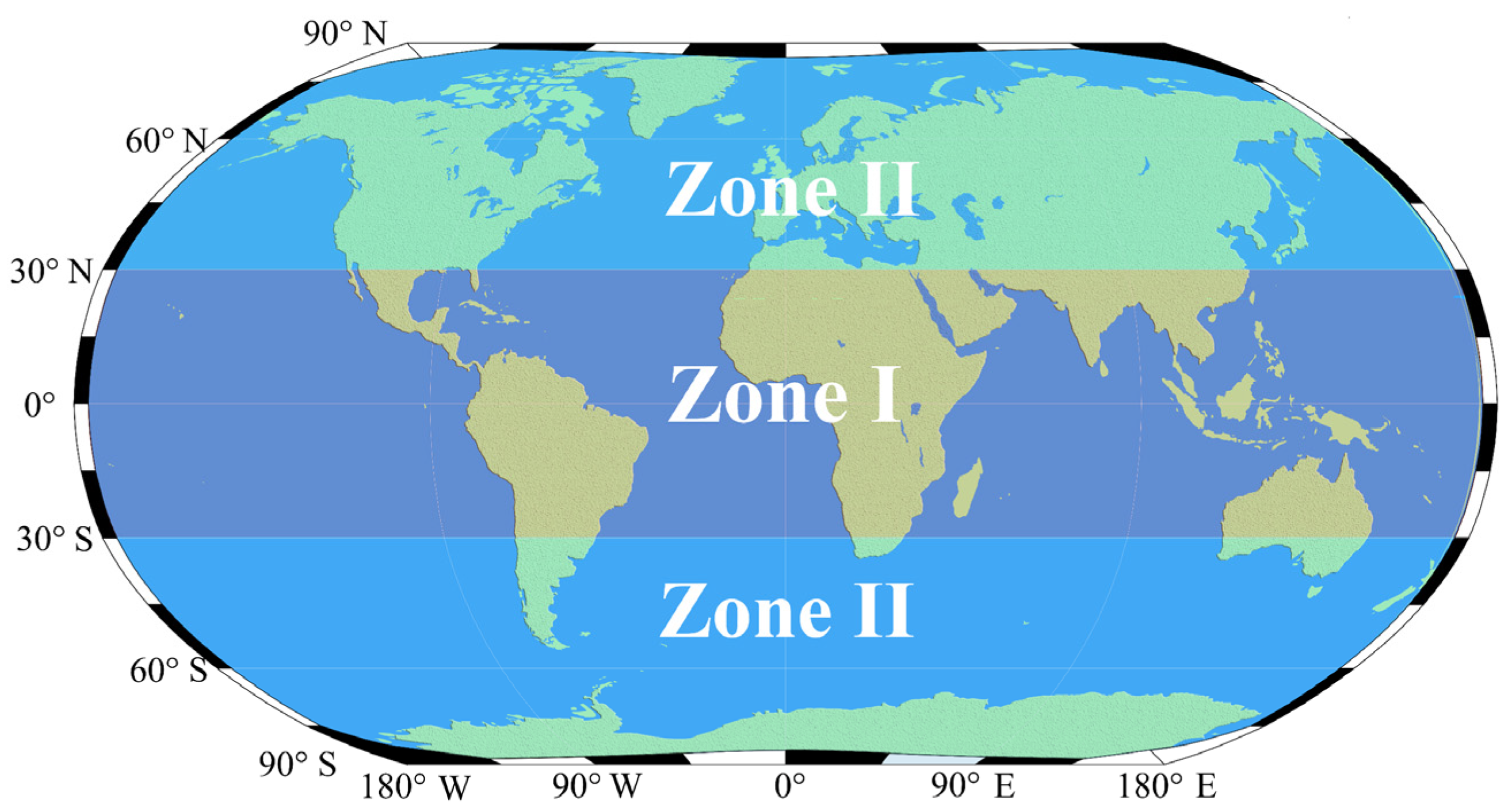
Figure 8, the difference maps between different time sampling intervals show regular variations. It is found that the time sampling interval significantly affects the angular combination characteristics for the observed points in the mid–low latitude zone. The angular combination of observed points in the high latitude zone is less sensitive to time sampling intervals. Therefore, the Earth’s surface can be divided into two major zones, as shown in
Figure 11. Zone I is in the mid–low latitude zone, and its latitude varies from 30° S to 30° N. For the observed point in Zone I, the angular combination is sensitive, however, to the variety of the time sampling interval. The Zone II consists of two parts, which are between 30° N and 90° N, or 30° S and 90° S. The observed points in these latitude zones are not sensitive to the variations of the time sampling interval.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}