
A New Way for Cartesian Coordinate Transformation and Its Precision Evaluation




Abstract
:1. Introduction
2. Methods
2.1. Related Works
2.1.1. Rigid Body Transformation
2.1.2. Parameter Estimation of the Current Transformation Model
2.1.3. Evaluation Indices of Transformation Precision
2.2. New Transformation Model
2.3. Implementation Procedure of the New Transformation Model
3. Experiments and Discussion
3.1. Constraint Conditions
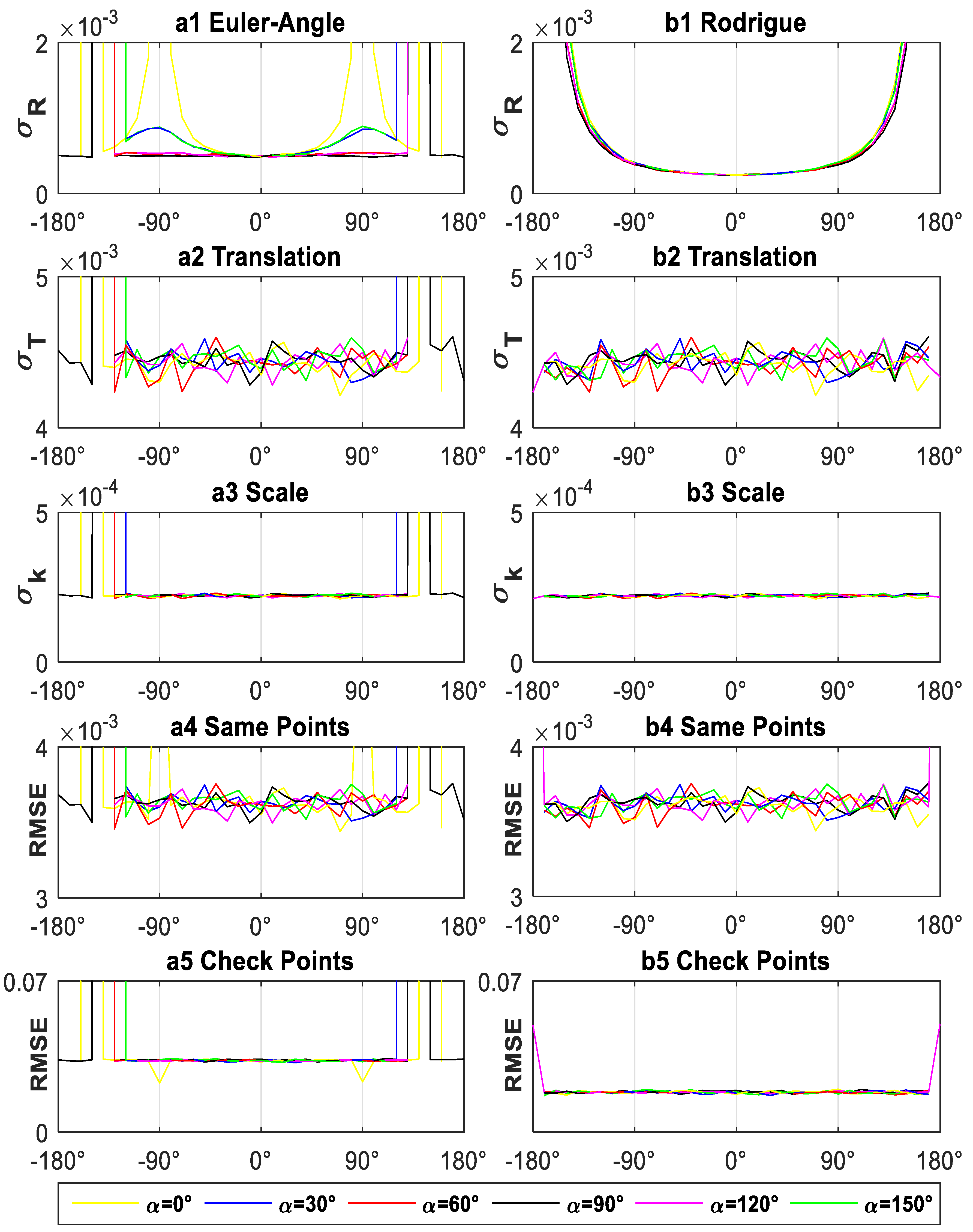
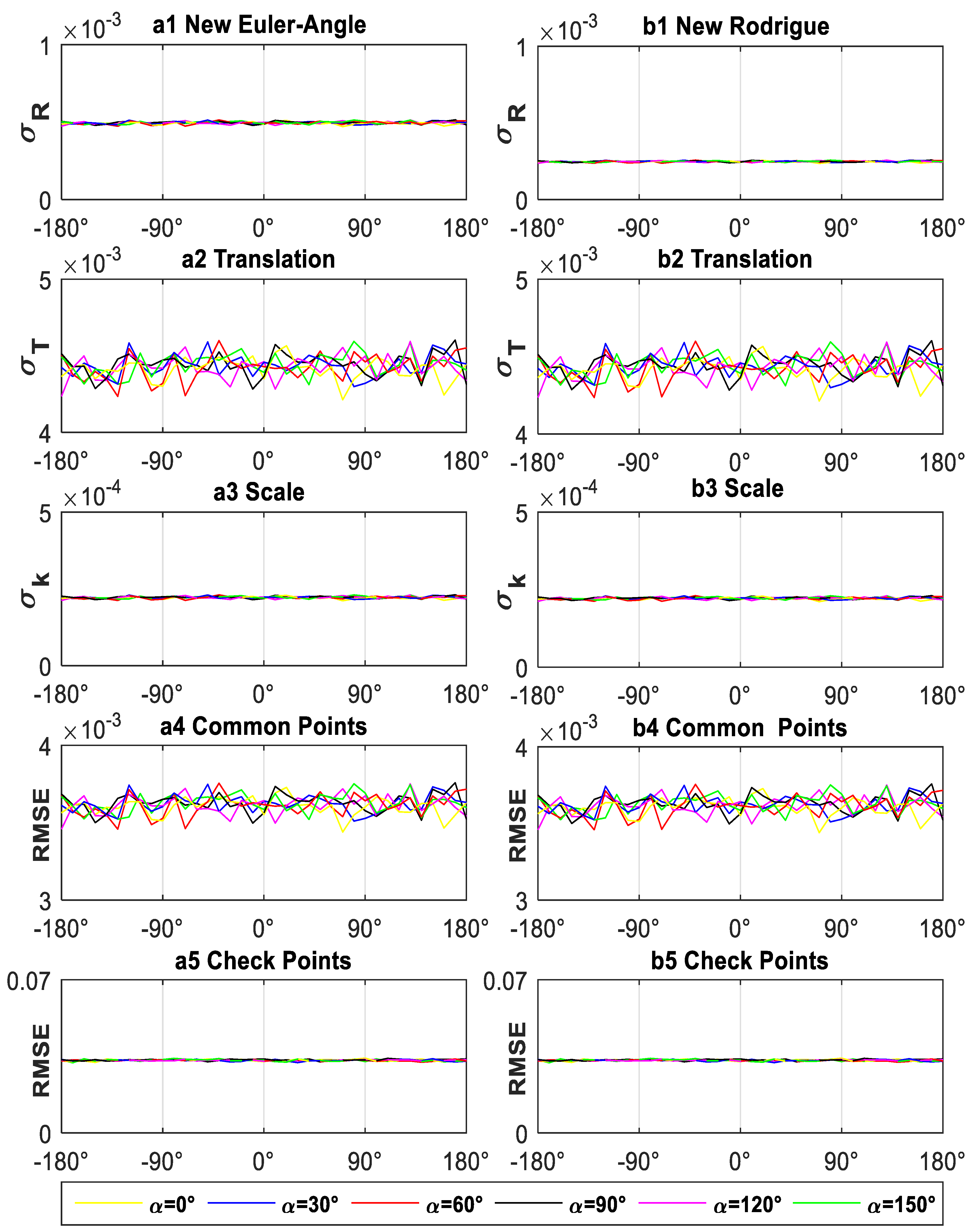
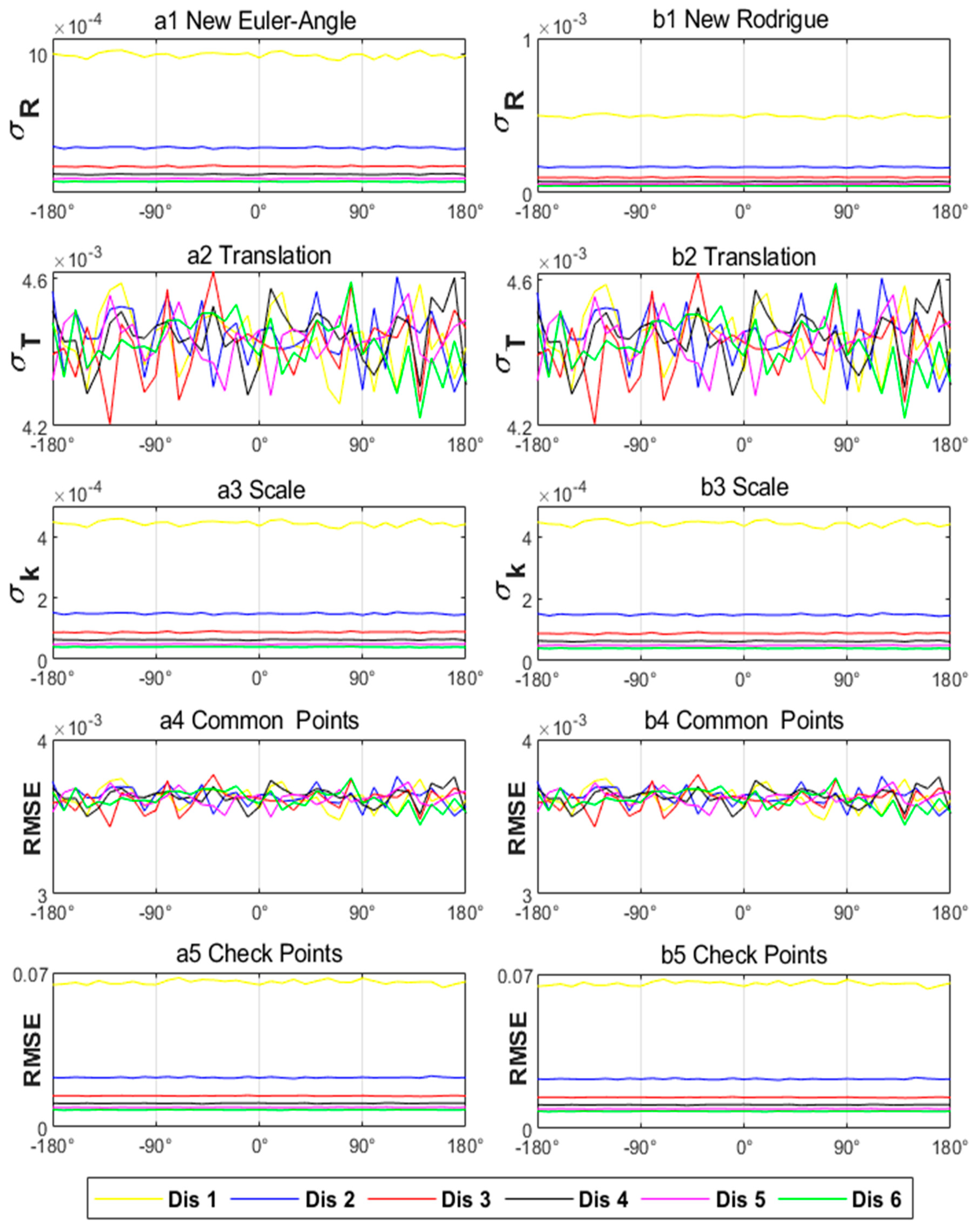
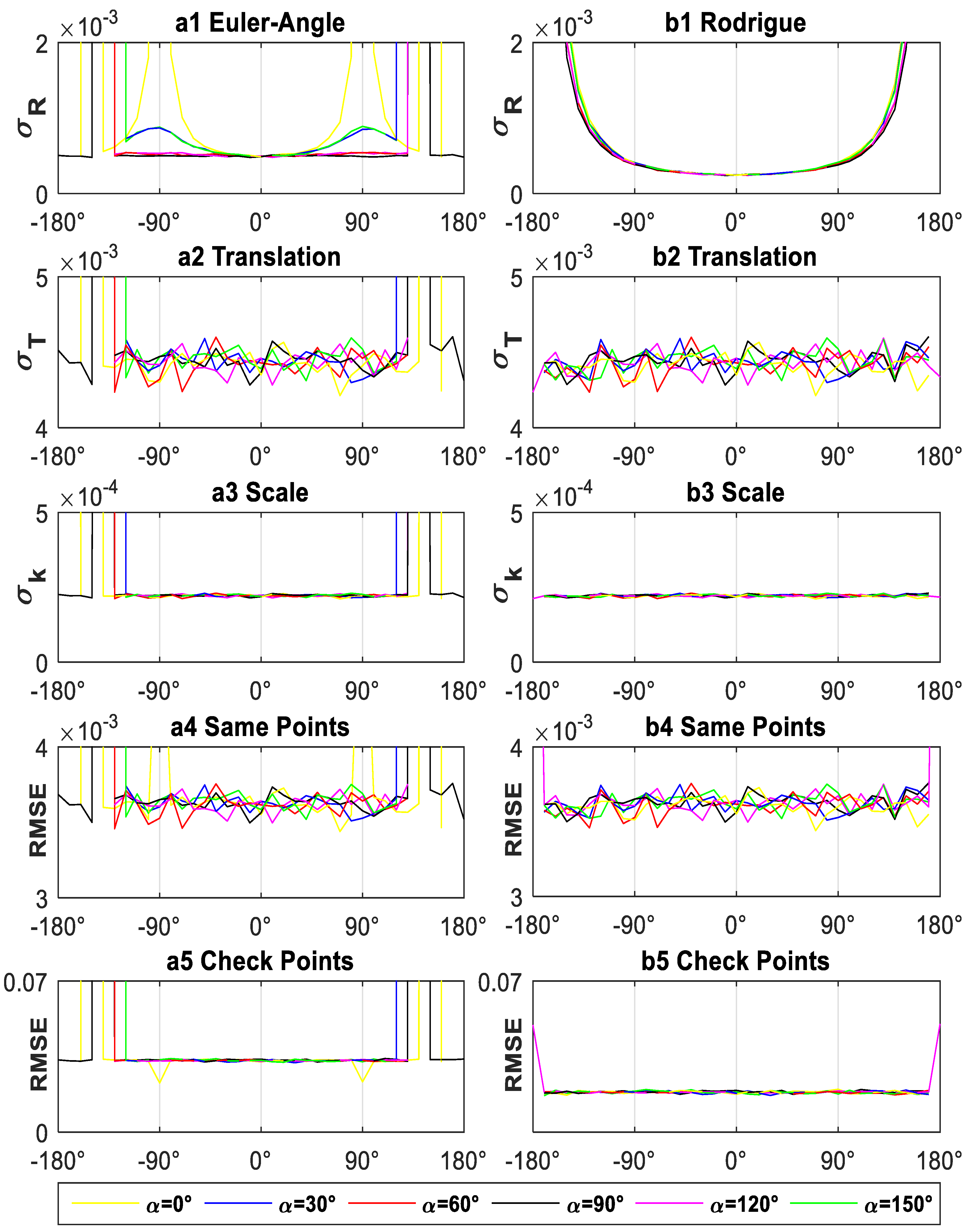
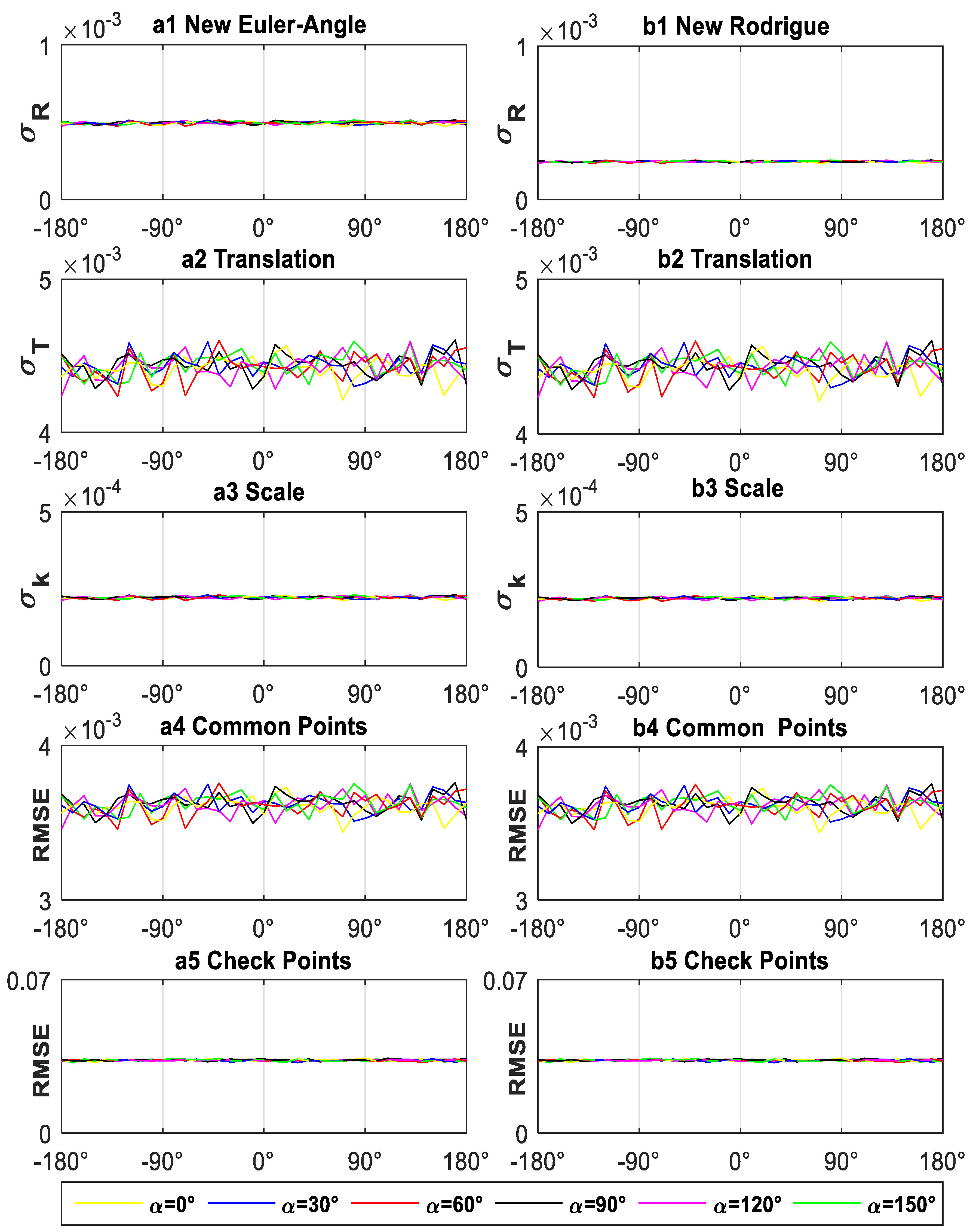
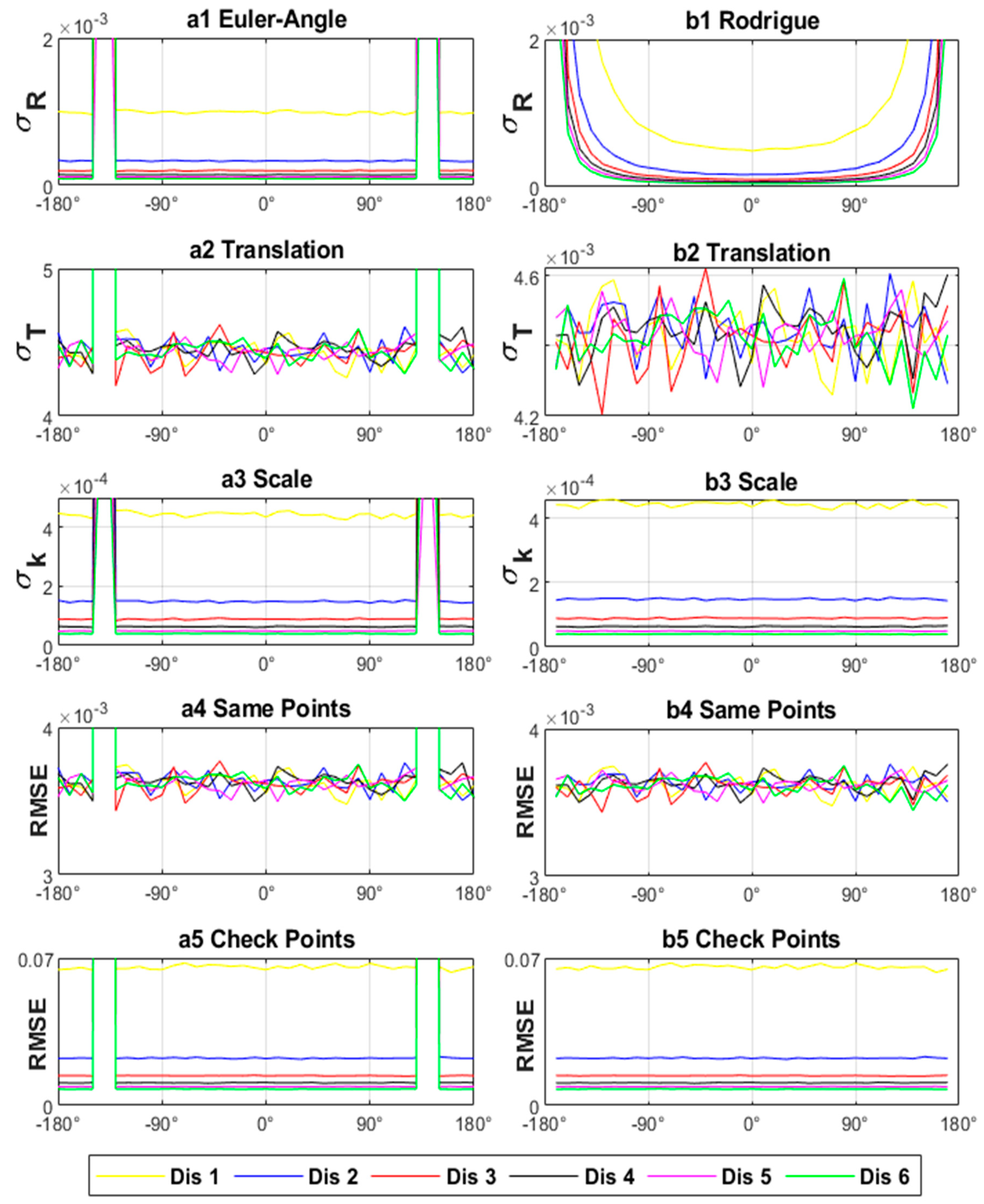
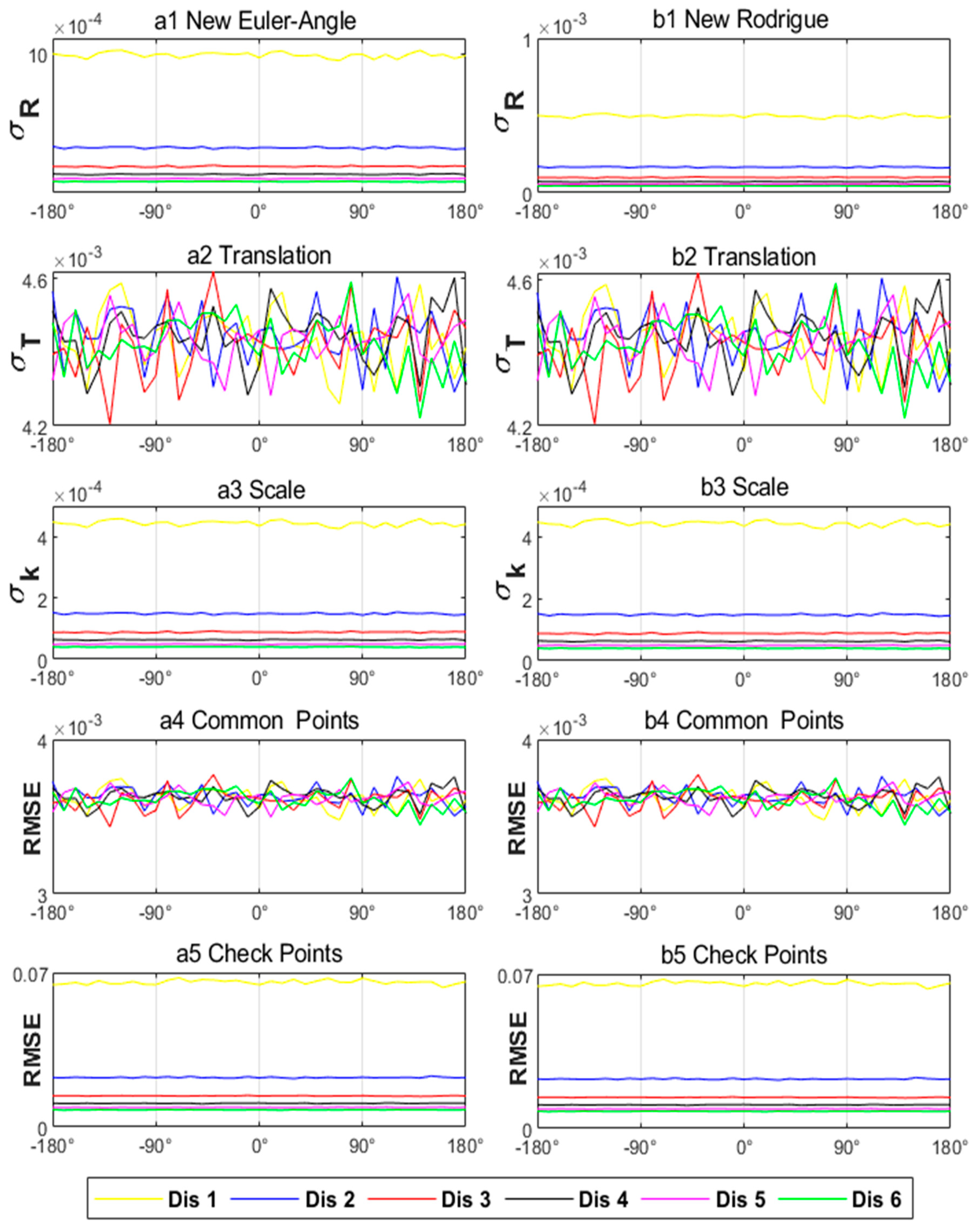
3.2. Simulation Experiments
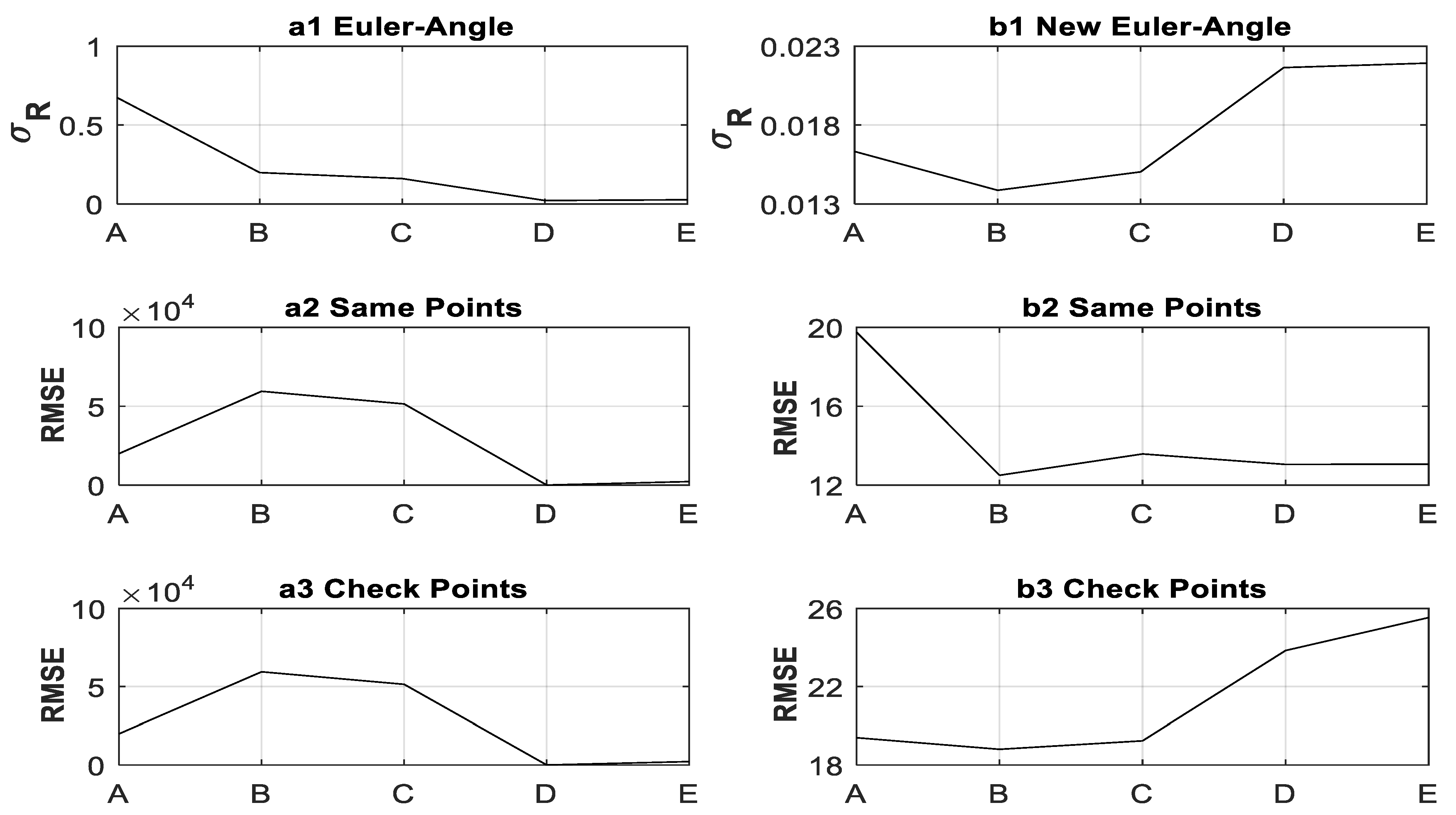
3.3. Practical Engineering Case
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Calculation of Approximate Transformation Parameters by the Orthogonal Procrustes Method
Appendix B. Euler Angle Method
Appendix C. Rodrigue Method
Appendix D. Calculation Procedure of the Transformation Precision Index for Different Rotation Angles
References
- Chen, Y.; Shen, Y.Z.; Liu, D.J. A simplified model of three dimensional-datum transformation adapted to big rotation angle. Geomat. Inf. Sci. Wuhan Univ. 2004, 29, 1101–1104. [Google Scholar]
- Luo, C.L.; Zhang, Z.L.; Deng, Y.; Mei, W.S.; Chen, B.R. On nonlinear 3D rectangular coordinate transformation method based on improved Gauss-Newton method. J. Geod. Geodyn. 2007, 27, 50–54. [Google Scholar]
- Qin, S.W.; Gu, C.; Pan, G.R. A simple and convenient coordinate transformation model for any rotation angle. Geotech. Inverstigation Surv. 2009, 62–65. [Google Scholar]
- Yao, J.L.; Han, B.M.; Yang, Y.X. Application of Lodrigues Matrix in 3D coordinate transformation. Geomat. Inf. Sci. Wuhan Univ. 2006, 31, 1094–1119. [Google Scholar] [CrossRef]
- Li, B.F.; Shen, Y.Z.; Li, W.X. The seamless model for three-dimensional datum transformation. Sci. China Earth Sci. 2012, 55, 2099–2108. [Google Scholar] [CrossRef]
- Li, B.F.; Huang, S.Q. Analytical close-form solutions for three-dimensional datum transformation with big rotation angles. Acta Geod. Et Cartogr. Sin. 2016, 45, 267–273. [Google Scholar]
- Eggert, D.W.; Lorusso, A.; Fisher, R.B. Estimating 3-D rigid body transformations: A comparison of four major algorithms. Mach. Vis. Appl. 1997, 9, 272–290. [Google Scholar] [CrossRef]
- Yao, Y.B.; Huang, C.M.; Li, C.C.; Kong, J. A new algorithm for solution of transformation parameters of big rotation angle’s 3D coordinate. Geomat. Inf. Sci. Wuhan Univ. 2012, 37, 253–256. [Google Scholar]
- Liu, Z.P.; Yang, L. An improved method for spatial rectangular coordinate transformation with big rotation angle. J. Geod. Geodyn. 2016, 36, 586–590. [Google Scholar]
- Yang, R.H. Research on Point Cloud Angular Resolution and Processing Model of Terrestrial Laser Scanning. Ph.D. Thesis, Wuhan University, Wuhan, China, 2011. [Google Scholar]
- Yang, R.H.; Meng, X.L.; Xiang, Z.J.; Li, Y.M.; You, Y.S. Establishment of a new quantitative evaluation model of the targets geometry distribution for terrestrial laser scanning. Sensors 2020, 20, 555. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Z.W.; Li, K.Z.; Zhao, L.J.; Wang, Y.K.; Liang, X.Q. Three-dimensional coordinate transformation adapted to arbitrary rotation angles based on unit quaternion. J. Geod. Geodyn. 2017, 37, 81–85. [Google Scholar]
- Lin, P. The Method of Total Least Squares for 3d Datum Transformation in the Arbitrary Rotational Angle. Master’s Thesis, Anhui University of Science and Technology, Huainan, China, 2015. [Google Scholar]
- Zeng, W.X.; Tao, B.Z. Non-linear adjustment model of three-dimensional coordinate transformation. Geomat. Inf. Sci. Wuhan Univ. 2003, 28, 566–568. [Google Scholar]
- Zeng, H.E.; Huang, S.X. A kind of direct search method adapted to solution of 3d coordinate transformation parameters. Geomat. Inf. Sci. Wuhan Univ. 2008, 33, 1118–1121. [Google Scholar]
- Wu, J.Z.; Wang, A.Y. A unified model for cartesian coordinate transformations in two- and three-dimensional space. J. Geod. Geodyn. 2015, 35, 1046–1048, 1052. [Google Scholar]
- Li, M.F.; Liu, Z.L.; Wang, Y.M.; Sun, X.R. Study on an improved model for ill-conditioned three-dimensional coordinate transformation with big rotation angles. J. Geod. Geodyn. 2017, 37, 441–445. [Google Scholar]
- Chen, Z.Y.; Liu, C. Spatial coordinate transformation based on multiple parameter regularization and its accuracy analysis. J. Geod. Geodyn. 2008, 28, 92–95. [Google Scholar]
- Fang, X.; Zeng, W.X.; Liu, J.N.; Yao, Y.B. A general total least squares algorithm for three-dimensional coordinate transformations. Geomat. Inf. Sci. Wuhan Univ. 2014, 43, 1139–1143. [Google Scholar]
- Chen, Y.; Lu, J. Performing 3D similarity transformation by robust total least squares. Acta Geod. Et Cartogr. Sin. 2012, 41, 715–722. [Google Scholar]
- Fan, L.; Smethurst, J.A.; Atkinson, P.M.; Powrie, W. Error in target-based georeferencing and registration in terrestrial laser scanning. Comput. Geosci. 2015, 83, 54–64. [Google Scholar] [CrossRef] [Green Version]
- Yang, R.H.; Meng, X.L.; Yao, Y.B.; Chen, B.Y.; You, Y.S.; Xiang, Z.J. An analytical approach to evaluate point cloud registration error utilizing targets. ISPRS J. Photogramm. Remote Sens. 2018, 143, 48–56. [Google Scholar] [CrossRef]
- Liu, J. Research on Attitude Determination by Quaternion Method. Bachelor’s Thesis, Wuhan University, Wuhan, China, 2003. [Google Scholar]
- Qiu, W.N.; Tao, B.Z.; Yao, Y.B.; Wu, Y.; Huang, H.L. The Theory and Method of Surveying Data Processing, 1st ed.; Wuhan University Press: Wuhan China, 2008; pp. 1–6. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Common Points | Check Points |
|---|---|---|
| Experiment I | , , , , , | |
| Experiment II | ||
| Point Number | True Coordinates (mm) | Measured Coordinates (mm) | ||||
|---|---|---|---|---|---|---|
| 1 | 0.0 | 0.0 | 0.0 | 108,521.0 | 96,611.0 | 101,222.0 |
| 5 | 289.0 | 0.0 | 3327.0 | 108,819.0 | 99,931.0 | 101,213.0 |
| 6 | −114.0 | 216.5 | 3327.0 | 108,379.0 | 99,937.0 | 101,438.0 |
| 7 | −114.0 | −216.5 | 3327.0 | 108,378.0 | 99,939.0 | 100,996.0 |
| 8 | 444.0 | 0.0 | 5327.0 | 108,965.0 | 101,930.0 | 101,206.0 |
| 9 | −222.0 | 333.0 | 5327.0 | 108,302.0 | 101,930.0 | 101,538.0 |
| 10 | −222.0 | −333.0 | 5327.0 | 108,302.0 | 101,931.0 | 100,879.0 |
| 11 | 600.0 | 0.0 | 7327.0 | 109,126.0 | 103,938.0 | 101,202.0 |
| 12 | −300.0 | 450.0 | 7327.0 | 108,225.0 | 103,926.0 | 101,639.0 |
| 13 | −300.0 | −450.0 | 7327.0 | 108,224.0 | 103,925.0 | 100,762.0 |
| 14 | 444.0 | 0.0 | 9327.0 | 108,955.0 | 105,927.0 | 101,212.0 |
| 15 | −222.0 | 333.0 | 9327.0 | 108,290.0 | 105,916.0 | 101,540.0 |
| 16 | −222.0 | −333.0 | 9327.0 | 108,291.0 | 105,914.0 | 100,880.0 |
| 17 | 289.0 | 0.0 | 11,327.0 | 108,785.0 | 107,926.0 | 101,223.0 |
| 18 | −114.0 | 216.5 | 11,327.0 | 108,354.0 | 107,914.0 | 101,440.0 |
| 19 | −114.0 | −216.5 | 11,327.0 | 108,355.0 | 107,908.0 | 100,997.0 |
| 23 | 0.0 | 0.0 | 14,625.0 | 108,473.0 | 111,215.0 | 101,228.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, R.; Deng, C.; Yu, K.; Li, Z.; Pan, L. A New Way for Cartesian Coordinate Transformation and Its Precision Evaluation. Remote Sens. 2022, 14, 864. https://doi.org/10.3390/rs14040864
Yang R, Deng C, Yu K, Li Z, Pan L. A New Way for Cartesian Coordinate Transformation and Its Precision Evaluation. Remote Sensing. 2022; 14(4):864. https://doi.org/10.3390/rs14040864
Chicago/Turabian StyleYang, Ronghua, Chang Deng, Kegen Yu, Zhao Li, and Leixilan Pan. 2022. "A New Way for Cartesian Coordinate Transformation and Its Precision Evaluation" Remote Sensing 14, no. 4: 864. https://doi.org/10.3390/rs14040864
APA StyleYang, R., Deng, C., Yu, K., Li, Z., & Pan, L. (2022). A New Way for Cartesian Coordinate Transformation and Its Precision Evaluation. Remote Sensing, 14(4), 864. https://doi.org/10.3390/rs14040864