
Forest Disturbance Detection with Seasonal and Trend Model Components and Machine Learning Algorithms



Abstract
:1. Introduction
2. Materials and Methods
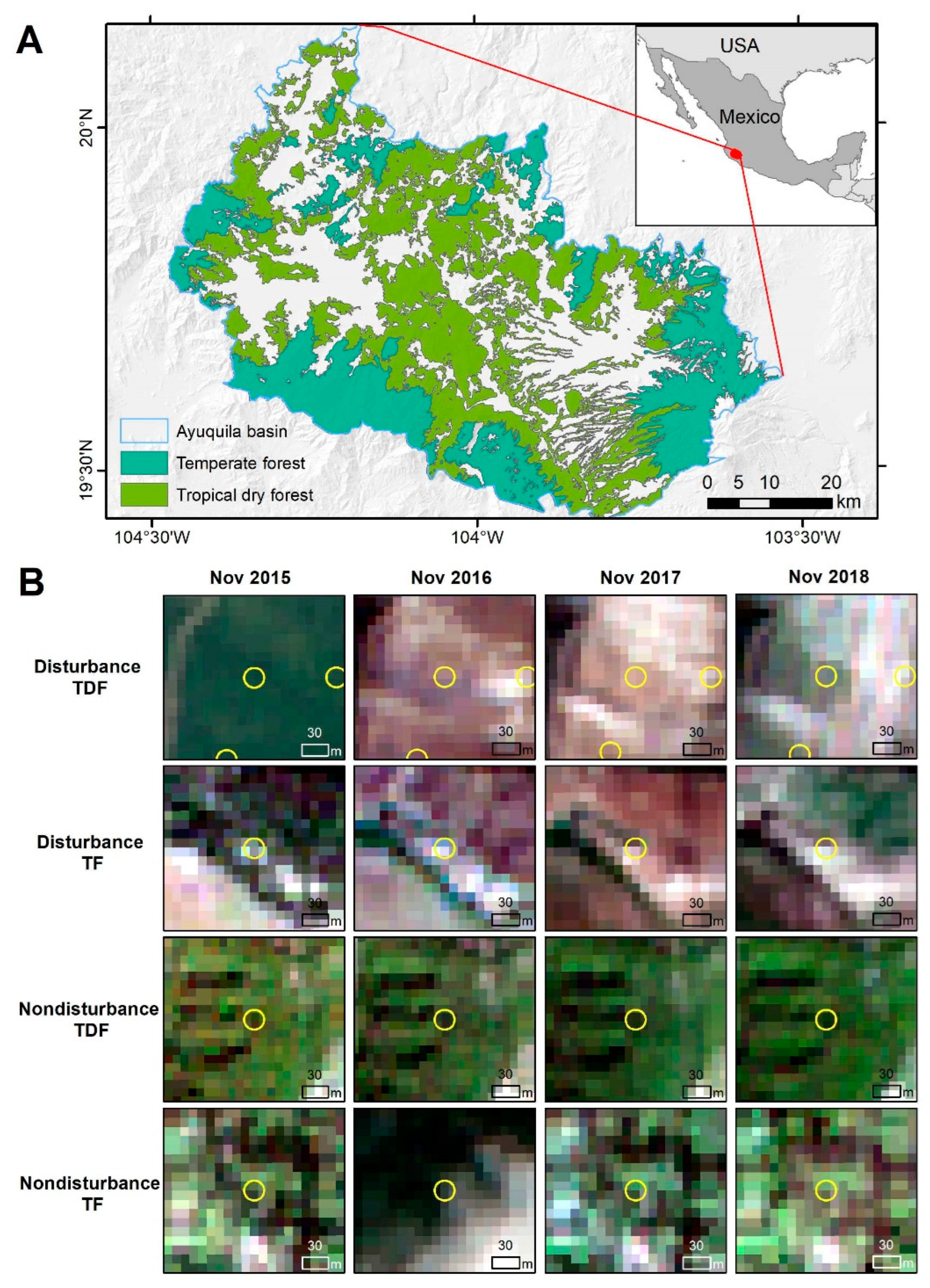
2.1. Study Site
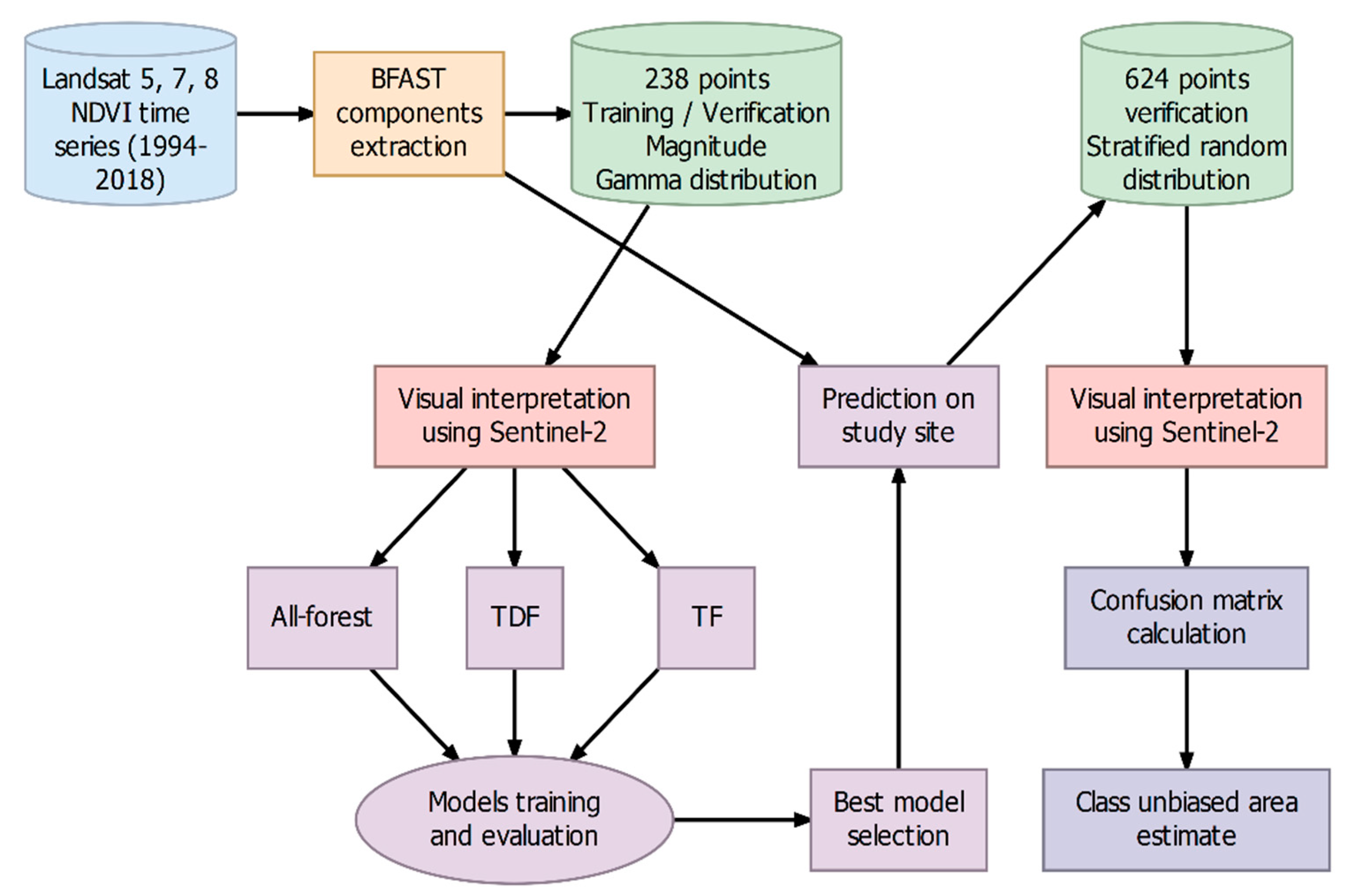
2.2. General Workflow
2.2.1. Training and Validation Datasets
2.2.2. Variables: BFAST Components and Time Series Landsat Data Quality
2.2.3. Baseline Model
2.2.4. Machine Learning Algorithm
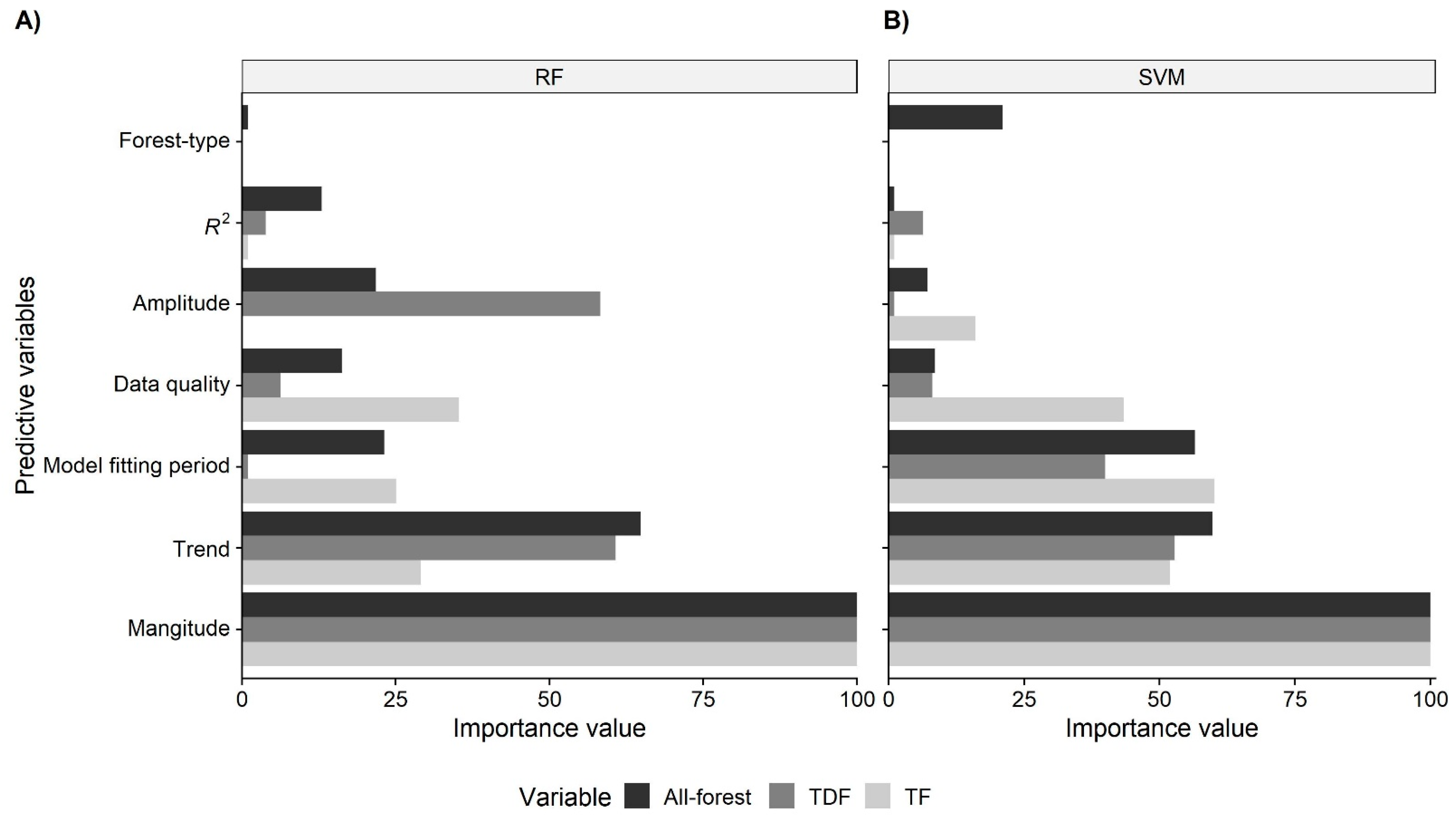
2.3. Variable Importance
2.4. Best Model Selection
2.5. Model Validation
2.6. Post Classification Processing and Accuracy Assessment
2.7. R Packages
3. Results
3.1. Variable Importance
3.2. Best Model Selection
3.3. Model Validation
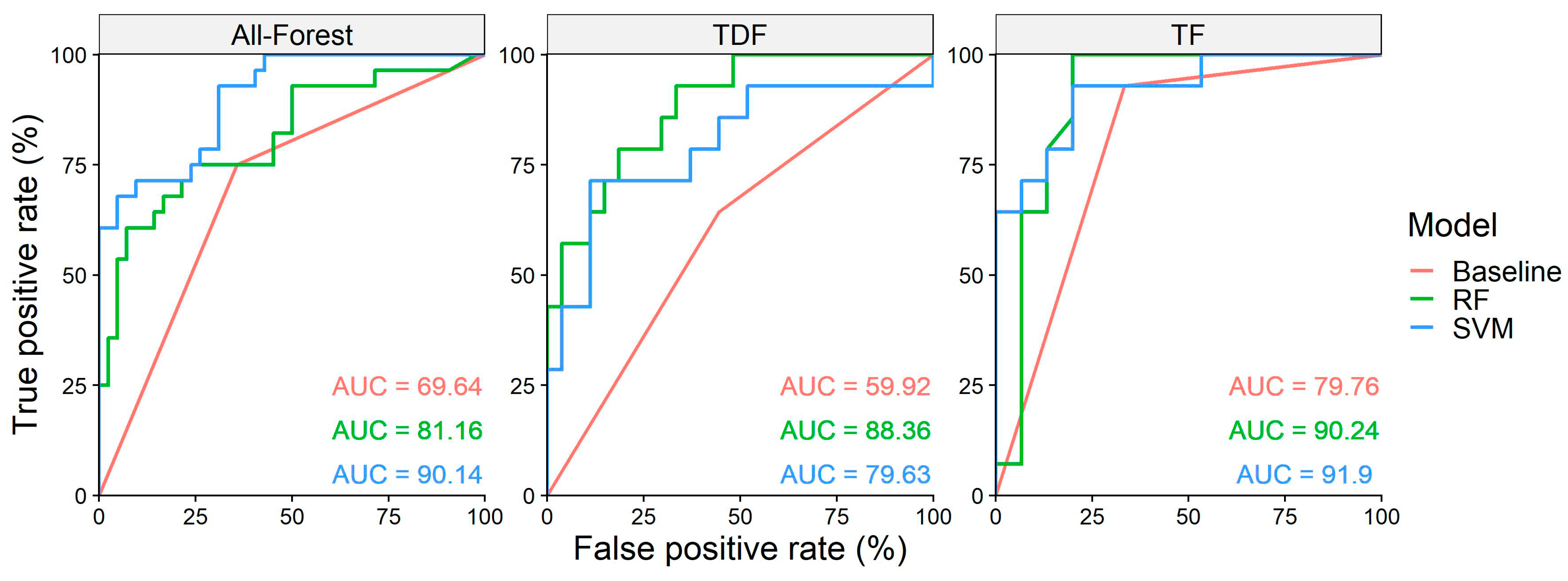
3.4. ROC Curve and AUC
3.5. Forest Disturbance Prediction in the Study Area
4. Discussion
4.1. Improvement in Disturbance Detection Using Machine Learning Algorithms
4.2. Variable Selection
4.3. Disturbance Area and Rate Estimation
4.4. Study Limitations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forest | Magnitude | Model Fitting Period | R2 | Amplitude | Trend | Data Quality | Change |
|---|---|---|---|---|---|---|---|
| TDF | −0.0453 | 13.33973 | 0.742599 | 0.424708 | 1.84 × 10−5 | 96.3039 | 0 |
| TDF | −0.03336 | 15.44384 | 0.784402 | 0.528003 | 1.69 × 10−5 | 96.9138 | 0 |
| TDF | −0.0349 | 15.46575 | 0.797803 | 0.565893 | 1.75 × 10−5 | 96.52852 | 0 |
| TDF | −0.0479 | 18.79452 | 0.769971 | 0.567595 | 2.05 × 10−5 | 96.18131 | 0 |
| TDF | −0.03756 | 23.30685 | 0.820069 | 0.543106 | 1.09 × 10−5 | 96.34462 | 0 |
| TDF | −0.02102 | 14.80822 | 0.628496 | 0.319633 | 2.39 × 10−5 | 97.00333 | 0 |
| TDF | −0.00864 | 12.85753 | 0.68601 | 0.364489 | 3.27 × 10−5 | 96.82574 | 0 |
| TDF | −0.06631 | 15.44384 | 0.697506 | 0.473892 | 2.15 × 10−5 | 96.64775 | 1 |
| TDF | −0.05915 | 14.89589 | 0.687518 | 0.482008 | 2.30 × 10−5 | 96.39574 | 0 |
| TDF | −0.05569 | 13.33973 | 0.738573 | 0.456286 | 2.86 × 10−5 | 96.22176 | 0 |
| TDF | −0.05614 | 13.25206 | 0.78678 | 0.524416 | 3.29 × 10−5 | 96.46548 | 0 |
| TDF | −0.09008 | 13.12055 | 0.802909 | 0.531653 | 3.38 × 10−5 | 96.59708 | 0 |
| TDF | −0.07047 | 9.484932 | 0.809726 | 0.57334 | 4.58 × 10−5 | 95.75513 | 0 |
| TDF | −0.07922 | 11.23836 | 0.747789 | 0.484405 | 5.31 × 10−5 | 96.29539 | 0 |
| TDF | −0.06806 | 13.25206 | 0.795391 | 0.527232 | 2.91 × 10−5 | 96.52749 | 0 |
| TDF | −0.07734 | 23.30685 | 0.824435 | 0.566505 | 1.97 × 10−5 | 96.37988 | 0 |
| TDF | −0.05171 | 22.95617 | 0.763023 | 0.491165 | 1.58 × 10−5 | 96.73031 | 0 |
| TDF | −0.07921 | 13.12055 | 0.751532 | 0.506748 | 3.74 × 10−5 | 96.51357 | 0 |
| TDF | −0.09603 | 18.92603 | 0.735989 | 0.515702 | 1.73 × 10−5 | 96.65653 | 0 |
| TDF | −0.08817 | 11.36986 | 0.741998 | 0.441381 | 3.89 × 10−5 | 96.21778 | 0 |
| TDF | −0.10289 | 13.47123 | 0.56757 | 0.450491 | 3.20 × 10−5 | 96.40098 | 0 |
| TDF | −0.10503 | 9.441096 | 0.743041 | 0.49261 | 5.59 × 10−5 | 95.88048 | 0 |
| TDF | −0.13812 | 4.358904 | 0.3772 | 0.182208 | 6.35 × 10−5 | 94.53518 | 0 |
| TDF | −0.1096 | 13.38356 | 0.699271 | 0.510579 | 4.29 × 10−5 | 97.89194 | 0 |
| TDF | −0.11448 | 13.12055 | 0.735314 | 0.50283 | 4.16 × 10−5 | 96.59708 | 0 |
| TDF | −0.10046 | 10.84384 | 0.696341 | 0.465479 | 4.73 × 10−5 | 96.46375 | 1 |
| TDF | −0.10623 | 12.15616 | 0.635221 | 0.470523 | 5.27 × 10−5 | 96.4849 | 0 |
| TDF | −0.11491 | 8.257534 | 0.668242 | 0.388748 | 9.26 × 10−5 | 94.95854 | 0 |
| TDF | −0.11653 | 23.30685 | 0.802533 | 0.536494 | 1.30 × 10−5 | 95.95675 | 0 |
| TDF | −0.1045 | 13.33973 | 0.752179 | 0.49432 | 2.59 × 10−5 | 96.52978 | 0 |
| TDF | −0.11158 | 11.28219 | 0.768633 | 0.506031 | 4.18 × 10−5 | 95.92134 | 0 |
| TDF | −0.12218 | 11.28219 | 0.775196 | 0.462432 | 4.91 × 10−5 | 96.04273 | 0 |
| TDF | −0.11224 | 12.85753 | 0.744677 | 0.481245 | 4.12 × 10−5 | 96.46357 | 0 |
| TDF | −0.13279 | 8.958904 | 0.719625 | 0.443881 | 6.46 × 10−5 | 95.38367 | 0 |
| TDF | −0.12852 | 9.397261 | 0.708184 | 0.413003 | 5.80 × 10−5 | 96.93967 | 0 |
| TDF | −0.10397 | 20.89589 | 0.745697 | 0.491635 | 2.77 × 10−5 | 97.129 | 0 |
| TDF | −0.1244 | 11.89315 | 0.711711 | 0.461465 | 4.04 × 10−5 | 96.269 | 0 |
| TDF | −0.11094 | 16.16438 | 0.699765 | 0.422634 | 3.46 × 10−5 | 96.61074 | 0 |
| TDF | −0.12291 | 8.30137 | 0.639768 | 0.270452 | 5.85 × 10−5 | 95.31508 | 0 |
| TDF | −0.12518 | 23.30685 | 0.740104 | 0.349312 | 2.01 × 10−5 | 96.73249 | 1 |
| TDF | −0.12974 | 23.30685 | 0.74704 | 0.463843 | 9.89 × 10−6 | 96.4504 | 0 |
| TDF | −0.11058 | 9.528768 | 0.638787 | 0.434527 | 5.24 × 10−5 | 96.43576 | 0 |
| TDF | −0.15147 | 23.30685 | 0.746398 | 0.502824 | 1.15 × 10−5 | 96.63846 | 1 |
| TDF | −0.18708 | 9.441096 | 0.818664 | 0.584014 | 4.80 × 10−5 | 95.79344 | 1 |
| TDF | −0.17212 | 10.23014 | 0.697291 | 0.434703 | 5.31 × 10−5 | 96.76038 | 1 |
| TDF | −0.17997 | 9.441096 | 0.67116 | 0.360017 | 4.48 × 10−5 | 95.70641 | 1 |
| TDF | −0.18231 | 10.84384 | 0.750788 | 0.480562 | 4.91 × 10−5 | 96.26168 | 0 |
| TDF | −0.15695 | 6.331507 | 0.587813 | 0.265593 | 0.000104 | 95.02596 | 0 |
| TDF | −0.17338 | 2.213699 | 0.457311 | 0.253858 | 9.94 × 10−5 | 91.22373 | 0 |
| TDF | −0.16738 | 18.70685 | 0.817585 | 0.562854 | 2.83 × 10−5 | 96.11949 | 1 |
| TDF | −0.15555 | 13.38356 | 0.796706 | 0.574832 | 2.33 × 10−5 | 96.33647 | 1 |
| TDF | −0.16485 | 11.84931 | 0.819431 | 0.542392 | 4.09 × 10−5 | 96.37078 | 0 |
| TDF | −0.15863 | 13.23014 | 0.613797 | 0.435501 | 3.96 × 10−5 | 98.07453 | 0 |
| TDF | −0.1543 | 14.43562 | 0.591812 | 0.397466 | 3.81 × 10−5 | 97.3055 | 0 |
| TDF | −0.15364 | 6.2 | 0.635558 | 0.288652 | 8.94 × 10−5 | 94.92049 | 0 |
| TDF | −0.15916 | 9.00274 | 0.781614 | 0.421343 | 8.11 × 10−5 | 95.6191 | 0 |
| TDF | −0.16295 | 13.25206 | 0.669782 | 0.363889 | 4.88 × 10−5 | 96.09343 | 0 |
| TDF | −0.17784 | 8.082191 | 0.806799 | 0.411957 | 0.000107 | 95.73026 | 0 |
| TDF | −0.15906 | 2.213699 | 0.602617 | 0.329651 | 8.89 × 10−5 | 91.96539 | 0 |
| TDF | −0.15487 | 13.25206 | 0.681363 | 0.456178 | 3.65 × 10−5 | 96.5895 | 0 |
| TDF | −0.18407 | 15.44384 | 0.704641 | 0.455582 | 2.65 × 10−5 | 96.80738 | 1 |
| TDF | −0.18126 | 8.30137 | 0.669672 | 0.383595 | 7.59 × 10−5 | 95.24909 | 0 |
| TDF | −0.15282 | 9.441096 | 0.748614 | 0.464724 | 6.52 × 10−5 | 96.51871 | 0 |
| TDF | −0.15459 | 8.213698 | 0.678228 | 0.373325 | 8.90 × 10−5 | 95.23174 | 0 |
| TDF | −0.154 | 13.38356 | 0.772406 | 0.491027 | 2.40 × 10−5 | 96.6844 | 0 |
| TDF | −0.15438 | 8.213698 | 0.7376 | 0.370441 | 8.89 × 10−5 | 95.4985 | 0 |
| TDF | −0.16954 | 8.257534 | 0.697736 | 0.344804 | 4.68 × 10−5 | 95.42288 | 1 |
| TDF | −0.15948 | 2.126027 | 0.394608 | 0.193095 | 9.77 × 10−5 | 92.02059 | 0 |
| TDF | −0.2016 | 4.972603 | 0.537538 | 0.237246 | 7.83 × 10−5 | 94.43832 | 0 |
| TDF | −0.21545 | 14.39178 | 0.702173 | 0.422295 | 3.38 × 10−5 | 96.00304 | 0 |
| TDF | −0.20137 | 9.309589 | 0.771202 | 0.497091 | 6.13 × 10−5 | 96.08708 | 0 |
| TDF | −0.21943 | 9.00274 | 0.725147 | 0.461319 | 4.80 × 10−5 | 95.71037 | 0 |
| TDF | −0.23151 | 9.221918 | 0.387895 | 0.180028 | 9.39 × 10−5 | 95.78259 | 0 |
| TDF | −0.21745 | 15.46575 | 0.756869 | 0.484993 | 3.41 × 10−5 | 95.90861 | 1 |
| TDF | −0.21089 | 2.126027 | 0.396737 | 0.251341 | 0.000136 | 92.79279 | 1 |
| TDF | −0.21431 | 12.76986 | 0.736191 | 0.47357 | 3.91 × 10−5 | 96.46075 | 1 |
| TDF | −0.21274 | 12.15616 | 0.712597 | 0.379622 | 2.98 × 10−5 | 96.03425 | 1 |
| TDF | −0.22979 | 13.33973 | 0.737281 | 0.510973 | 3.07 × 10−5 | 96.83778 | 1 |
| TDF | −0.20081 | 13.47123 | 0.748393 | 0.500066 | 2.53 × 10−5 | 96.52298 | 0 |
| TDF | −0.21194 | 9.221918 | 0.575599 | 0.391682 | 6.96 × 10−5 | 95.6935 | 0 |
| TDF | −0.2365 | 2.038356 | 0.417297 | 0.112016 | 0.000314 | 91.81208 | 0 |
| TDF | −0.21285 | 9.221918 | 0.820589 | 0.548374 | 5.06 × 10−5 | 95.7529 | 1 |
| TDF | −0.24967 | 12.06849 | 0.746606 | 0.480799 | 5.48 × 10−5 | 96.09623 | 1 |
| TDF | −0.22409 | 4.358904 | 0.507792 | 0.25495 | 0.000128 | 94.47236 | 0 |
| TDF | −0.22582 | 9.00274 | 0.776578 | 0.513665 | 7.33 × 10−5 | 96.0146 | 1 |
| TDF | −0.26288 | 13.38356 | 0.740385 | 0.447047 | 2.50 × 10−5 | 96.72533 | 1 |
| TDF | −0.25233 | 7.690411 | 0.781609 | 0.3282 | 8.94 × 10−5 | 95.37037 | 1 |
| TDF | −0.26758 | 1.20548 | 0.173027 | 0.127181 | 0.000184 | 93.19728 | 0 |
| TDF | −0.2557 | 13.12055 | 0.69426 | 0.402674 | 1.98 × 10−5 | 96.34656 | 1 |
| TDF | −0.29151 | 15.46575 | 0.713207 | 0.318498 | 3.80 × 10−5 | 96.79419 | 1 |
| TDF | −0.25723 | 4.972603 | 0.596336 | 0.324313 | 4.65 × 10−5 | 94.65859 | 1 |
| TDF | −0.25124 | 9.353425 | 0.70172 | 0.372796 | 5.92 × 10−5 | 96.07613 | 1 |
| TDF | −0.2522 | 23.30685 | 0.777187 | 0.475274 | 2.21 × 10−5 | 95.90973 | 1 |
| TDF | −0.25617 | 13.33973 | 0.613308 | 0.377054 | 2.39 × 10−5 | 96.44764 | 1 |
| TDF | −0.2642 | 19.32055 | 0.77771 | 0.49598 | 2.09 × 10−5 | 96.3278 | 1 |
| TDF | −0.25994 | 5.016438 | 0.537049 | 0.279299 | 0.000112 | 94.65066 | 1 |
| TDF | −0.28576 | 11.28219 | 0.641284 | 0.407793 | 5.45 × 10−5 | 95.82423 | 1 |
| TDF | −0.25507 | 7.778082 | 0.69847 | 0.328702 | 0.000112 | 95.38732 | 0 |
| TDF | −0.26736 | 1.928767 | 0.430775 | 0.10271 | 0.000274 | 92.05674 | 0 |
| TDF | −0.26181 | 4.79726 | 0.345256 | 0.230716 | 7.42 × 10−5 | 95.26256 | 0 |
| TDF | −0.27483 | 14.28219 | 0.669939 | 0.494723 | 3.56 × 10−5 | 97.81358 | 0 |
| TDF | −0.31231 | 13.25206 | 0.64658 | 0.30675 | 4.80 × 10−5 | 96.89954 | 1 |
| TDF | −0.3047 | 9.484932 | 0.645115 | 0.420937 | 6.90 × 10−5 | 95.69737 | 1 |
| TDF | −0.34894 | 5.936986 | 0.745417 | 0.151747 | 0.000195 | 94.97233 | 0 |
| TDF | −0.30696 | 4.819178 | 0.545039 | 0.258097 | 8.34 × 10−5 | 94.375 | 1 |
| TDF | −0.33039 | 4.928767 | 0.478812 | 0.290819 | 0.000117 | 95.22222 | 1 |
| TDF | −0.32061 | 5.10411 | 0.606013 | 0.162013 | 0.000169 | 95.49356 | 0 |
| TDF | −0.33084 | 1.972603 | 0.444768 | 0.096748 | 0.000329 | 92.23301 | 0 |
| TDF | −0.31088 | 2.016438 | 0.460919 | 0.17107 | 0.000253 | 91.72321 | 0 |
| TDF | −0.31157 | 3.221918 | 0.329094 | 0.305707 | 5.59 × 10−5 | 93.71283 | 1 |
| TDF | −0.34317 | 4.819178 | 0.495519 | 0.113864 | 0.000169 | 94.65909 | 0 |
| TDF | −0.38357 | 19.93151 | 0.812695 | 0.263614 | 4.40 × 10−5 | 96.1105 | 1 |
| TDF | −0.35445 | 1.315068 | 0.093447 | 0.086669 | 0.000251 | 93.34719 | 0 |
| TDF | −0.35312 | 14.72055 | 0.274482 | 0.248357 | 3.63 × 10−5 | 99.33011 | 0 |
| TDF | −0.36574 | 9.309589 | 0.658602 | 0.392694 | 7.94 × 10−5 | 95.61636 | 1 |
| TDF | −0.38864 | 23.30685 | 0.679754 | 0.328225 | 1.58 × 10−5 | 96.28585 | 1 |
| TDF | −0.37412 | 23.30685 | 0.62383 | 0.253992 | 2.19 × 10−5 | 96.23883 | 1 |
| TDF | −0.35913 | 5.542466 | 0.530187 | 0.193277 | 0.000159 | 95.65218 | 0 |
| TDF | −0.36352 | 2.191781 | 0.681885 | 0.131829 | 0.000522 | 93.13358 | 0 |
| TDF | −0.35709 | 9.441096 | 0.691955 | 0.296064 | 6.17 × 10−5 | 95.70641 | 1 |
| TDF | −0.36066 | 4.753425 | 0.613245 | 0.417467 | 4.41 × 10−6 | 94.93088 | 1 |
| TDF | −0.35418 | 8.345205 | 0.670651 | 0.391838 | 8.52 × 10−5 | 95.43813 | 1 |
| TDF | −0.35952 | 5.871233 | 0.481878 | 0.14312 | 0.000147 | 95.89552 | 0 |
| TDF | −0.35333 | 5.10411 | 0.572429 | 0.185931 | 0.000162 | 95.27897 | 0 |
| TDF | −0.43061 | 5.060274 | 0.541295 | 0.088574 | 0.000207 | 95.34632 | 0 |
| TDF | −0.40675 | 4.79726 | 0.414465 | 0.292673 | 0.000112 | 94.92009 | 1 |
| TDF | −0.4392 | 3.964384 | 0.625067 | 0.101401 | 0.000212 | 94.40607 | 0 |
| TDF | −0.41748 | 4.819178 | 0.426473 | 0.291789 | 0.00012 | 94.77273 | 1 |
| TDF | −0.43424 | 4.753425 | 0.674289 | 0.134221 | 0.000208 | 94.87327 | 0 |
| TDF | −0.40256 | 1.643836 | 0.396256 | 0.261978 | 0.000442 | 92.34609 | 0 |
| TDF | −0.42082 | 5.016438 | 0.543248 | 0.077793 | 0.000196 | 95.19651 | 0 |
| TDF | −0.41716 | 19.05754 | 0.855686 | 0.288564 | 5.29 × 10−5 | 96.11902 | 1 |
| TDF | −0.40572 | 5.542466 | 0.781963 | 0.129629 | 0.000244 | 94.96047 | 0 |
| TDF | −0.46477 | 1.249315 | 0.323113 | 0.127325 | 0.000484 | 92.77899 | 0 |
| TDF | −0.48301 | 13.38356 | 0.591082 | 0.190154 | 2.10 × 10−5 | 96.47974 | 1 |
| TDF | −0.47109 | 14.72055 | 0.600144 | 0.21734 | 1.68 × 10−5 | 96.57611 | 1 |
| TDF | −0.49806 | 1.249315 | 0.283891 | 0.108266 | 0.000501 | 93.21663 | 0 |
| TF | −0.02262 | 12.94521 | 0.290045 | 0.162023 | 9.13 × 10−6 | 97.67245 | 0 |
| TF | −0.04735 | 13.33973 | 0.533457 | 0.384551 | 2.15 × 10−5 | 96.55031 | 0 |
| TF | −0.04572 | 18.53151 | 0.610069 | 0.435479 | 1.48 × 10−5 | 96.4819 | 0 |
| TF | −0.03922 | 14.39178 | 0.459061 | 0.339841 | 2.66 × 10−5 | 97.0118 | 0 |
| TF | −0.01476 | 22.95617 | 0.194485 | 0.061185 | 1.06 × 10−5 | 96.84964 | 0 |
| TF | −0.09167 | 11.63288 | 0.648829 | 0.32088 | 5.35 × 10−5 | 97.00965 | 0 |
| TF | −0.0851 | 17.08493 | 0.794337 | 0.541089 | 2.39 × 10−5 | 96.5368 | 0 |
| TF | −0.07219 | 11.84931 | 0.719495 | 0.305059 | 2.03 × 10−5 | 96.67129 | 0 |
| TF | −0.05056 | 9.309589 | 0.527394 | 0.237606 | 3.91 × 10−5 | 96.41071 | 0 |
| TF | −0.05958 | 23.30685 | 0.813945 | 0.567206 | 1.74 × 10−5 | 95.9685 | 0 |
| TF | −0.05932 | 11.89315 | 0.791564 | 0.491535 | 4.10 × 10−5 | 96.70659 | 0 |
| TF | −0.05597 | 14.30411 | 0.700437 | 0.414025 | 3.26 × 10−5 | 97.35734 | 0 |
| TF | −0.06039 | 22.95617 | 0.651963 | 0.371185 | 1.80 × 10−5 | 96.31265 | 0 |
| TF | −0.05082 | 12.76986 | 0.431005 | 0.151947 | 1.39 × 10−5 | 97.29729 | 0 |
| TF | −0.0906 | 11.10685 | 0.668254 | 0.311451 | 6.02 × 10−5 | 96.94205 | 0 |
| TF | −0.12488 | 21.44384 | 0.45162 | 0.102976 | 1.95 × 10−5 | 99.66786 | 0 |
| TF | −0.10756 | 21.4 | 0.737156 | 0.237393 | 1.74 × 10−5 | 99.66718 | 0 |
| TF | −0.11522 | 11.89315 | 0.684706 | 0.415467 | 4.90 × 10−5 | 96.79871 | 0 |
| TF | −0.10173 | 11.23836 | 0.703277 | 0.336983 | 3.85 × 10−5 | 95.90543 | 0 |
| TF | −0.11942 | 13.5589 | 0.696524 | 0.445791 | 4.17 × 10−5 | 96.60606 | 0 |
| TF | −0.13365 | 11.93699 | 0.732592 | 0.393546 | 4.92 × 10−5 | 96.71868 | 0 |
| TF | −0.10699 | 12.98904 | 0.680897 | 0.455962 | 3.91 × 10−5 | 96.2674 | 0 |
| TF | −0.12874 | 12.15616 | 0.664849 | 0.364463 | 3.99 × 10−5 | 96.66516 | 0 |
| TF | −0.12132 | 12.15616 | 0.694252 | 0.444977 | 2.90 × 10−5 | 96.77782 | 0 |
| TF | −0.11947 | 10.8 | 0.628612 | 0.407771 | 4.43 × 10−5 | 96.47476 | 0 |
| TF | −0.10282 | 12.76986 | 0.725571 | 0.460912 | 3.73 × 10−5 | 96.50365 | 0 |
| TF | −0.10412 | 14.28219 | 0.675229 | 0.420696 | 3.12 × 10−5 | 97.52589 | 0 |
| TF | −0.1135 | 11.84931 | 0.67075 | 0.437291 | 3.66 × 10−5 | 96.60194 | 0 |
| TF | −0.11109 | 8.871233 | 0.802405 | 0.473938 | 6.59 × 10−5 | 96.14079 | 0 |
| TF | −0.14817 | 8.652055 | 0.618584 | 0.328632 | 6.05 × 10−5 | 96.5812 | 1 |
| TF | −0.1203 | 9.353425 | 0.665537 | 0.399402 | 5.84 × 10−5 | 96.19327 | 0 |
| TF | −0.17207 | 13.38356 | 0.704662 | 0.452327 | 2.81 × 10−5 | 96.60254 | 1 |
| TF | −0.16097 | 9.441096 | 0.785223 | 0.545458 | 3.92 × 10−5 | 96.02553 | 1 |
| TF | −0.15033 | 11.63288 | 0.632914 | 0.329545 | 4.00 × 10−5 | 96.77419 | 0 |
| TF | −0.15738 | 23.30685 | 0.553428 | 0.165368 | 1.99 × 10−5 | 96.96756 | 0 |
| TF | −0.1807 | 3.616438 | 0.446501 | 0.250369 | 8.97 × 10−5 | 95.76079 | 0 |
| TF | −0.16262 | 11.84931 | 0.719112 | 0.470987 | 5.08 × 10−5 | 96.11651 | 1 |
| TF | −0.16764 | 23.30685 | 0.682412 | 0.394082 | 1.45 × 10−5 | 96.25059 | 1 |
| TF | −0.15789 | 10.58082 | 0.107594 | 0.091385 | −8.90 × 10−6 | 97.25602 | 0 |
| TF | −0.15251 | 14.80822 | 0.75305 | 0.477127 | 4.00 × 10−5 | 96.70736 | 0 |
| TF | −0.16294 | 13.38356 | 0.725956 | 0.459349 | 2.95 × 10−5 | 96.54114 | 1 |
| TF | −0.17463 | 11.84931 | 0.771981 | 0.42334 | 5.44 × 10−5 | 96.78687 | 0 |
| TF | −0.17676 | 4.753425 | 0.558608 | 0.289002 | 4.29 × 10−5 | 95.39171 | 0 |
| TF | −0.19765 | 17.96164 | 0.749915 | 0.492095 | 2.97 × 10−5 | 96.41605 | 1 |
| TF | −0.16569 | 21.44384 | 0.620788 | 0.197482 | 2.65 × 10−5 | 99.62953 | 0 |
| TF | −0.19886 | 12.85753 | 0.761269 | 0.506095 | 3.72 × 10−5 | 96.44227 | 0 |
| TF | −0.17335 | 4.490411 | 0.649241 | 0.376716 | 9.77 × 10−5 | 98.10976 | 0 |
| TF | −0.1625 | 4.79726 | 0.683543 | 0.332143 | 3.88 × 10−5 | 96.00457 | 0 |
| TF | −0.17013 | 8.082191 | 0.754489 | 0.377575 | 7.03 × 10−5 | 96.34023 | 0 |
| TF | −0.16837 | 8.345205 | 0.783846 | 0.366675 | 6.62 × 10−5 | 96.7509 | 0 |
| TF | −0.21632 | 13.12055 | 0.76959 | 0.512075 | 4.15 × 10−5 | 96.05428 | 1 |
| TF | −0.22559 | 23.30685 | 0.67785 | 0.289514 | 1.75 × 10−5 | 96.19182 | 1 |
| TF | −0.21154 | 12.85753 | 0.766562 | 0.538063 | 5.30 × 10−5 | 96.48487 | 1 |
| TF | −0.2329 | 12.98904 | 0.720822 | 0.459314 | 2.35 × 10−5 | 96.39393 | 1 |
| TF | −0.20149 | 22.95617 | 0.360888 | 0.153679 | 1.54 × 10−5 | 96.34845 | 1 |
| TF | −0.20698 | 15.29041 | 0.710478 | 0.461842 | 2.48 × 10−5 | 96.16625 | 1 |
| TF | −0.22487 | 18.66301 | 0.737929 | 0.454678 | 3.01 × 10−5 | 96.46265 | 1 |
| TF | −0.22928 | 3.090411 | 0.465788 | 0.396536 | 3.93 × 10−5 | 95.5713 | 0 |
| TF | −0.20556 | 4.643836 | 0.518488 | 0.233282 | 0.000115 | 96.93396 | 0 |
| TF | −0.24299 | 23.30685 | 0.684501 | 0.287483 | 2.18 × 10−5 | 96.20358 | 1 |
| TF | −0.22637 | 15.33425 | 0.618501 | 0.349496 | 7.43 × 10−6 | 96.01643 | 1 |
| TF | −0.21411 | 11.89315 | 0.633748 | 0.382813 | 5.96 × 10−5 | 96.91386 | 0 |
| TF | −0.28623 | 23.30685 | 0.539063 | 0.233548 | 1.54 × 10−5 | 96.21532 | 1 |
| TF | −0.25423 | 14.43562 | 0.811445 | 0.387543 | 6.03 × 10−5 | 96.33776 | 1 |
| TF | −0.26478 | 4.709589 | 0.650802 | 0.40437 | 7.81 × 10−5 | 96.10465 | 1 |
| TF | −0.27368 | 11.89315 | 0.760329 | 0.481602 | 5.42 × 10−5 | 96.79871 | 1 |
| TF | −0.26242 | 8.082191 | 0.497489 | 0.22214 | 7.84 × 10−5 | 96.00136 | 0 |
| TF | −0.25918 | 13.33973 | 0.726444 | 0.275718 | 2.65 × 10−5 | 96.50924 | 1 |
| TF | −0.29659 | 23.30685 | 0.615274 | 0.209382 | 2.50 × 10−5 | 96.25059 | 1 |
| TF | −0.27568 | 14.34795 | 0.598175 | 0.308084 | 8.78 × 10−6 | 96.37266 | 1 |
| TF | −0.2631 | 8.871233 | 0.646465 | 0.278076 | 9.89 × 10−5 | 96.17166 | 0 |
| TF | −0.27551 | 7.164383 | 0.440842 | 0.227169 | 9.23 × 10−5 | 95.75688 | 0 |
| TF | −0.25938 | 7.164383 | 0.52456 | 0.260804 | 9.30 × 10−5 | 95.83334 | 0 |
| TF | −0.27658 | 22.95617 | 0.665763 | 0.373353 | 1.70 × 10−5 | 96.46778 | 1 |
| TF | −0.31804 | 5.958904 | 0.720874 | 0.496008 | 9.05 × 10−5 | 99.35662 | 0 |
| TF | −0.30249 | 23.30685 | 0.581094 | 0.218389 | 1.65 × 10−5 | 96.2976 | 1 |
| TF | −0.32208 | 23.30685 | 0.611473 | 0.238884 | 2.01 × 10−5 | 96.19182 | 1 |
| TF | −0.3278 | 4.709589 | 0.52152 | 0.35563 | 8.87 × 10−5 | 96.10465 | 1 |
| TF | −0.33703 | 23.30685 | 0.614924 | 0.252018 | 1.54 × 10−5 | 96.25059 | 1 |
| TF | −0.33582 | 23.30685 | 0.629637 | 0.266593 | 2.00 × 10−5 | 96.26234 | 1 |
| TF | −0.34522 | 4.79726 | 0.498216 | 0.230261 | 5.87 × 10−5 | 94.97717 | 1 |
| TF | −0.34275 | 12.37534 | 0.751576 | 0.302551 | 4.66 × 10−5 | 96.28154 | 1 |
| TF | −0.3581 | 23.30685 | 0.463526 | 0.196457 | 1.43 × 10−5 | 96.22708 | 1 |
| TF | −0.36095 | 7.361644 | 0.596833 | 0.209501 | 0.000146 | 96.05655 | 0 |
| TF | −0.36794 | 23.30685 | 0.522918 | 0.224043 | 1.50 × 10−5 | 96.34462 | 1 |
| TF | −0.36408 | 12.85753 | 0.503183 | 0.289444 | 1.40 × 10−5 | 96.25053 | 1 |
| TF | −0.35931 | 23.30685 | 0.592758 | 0.219493 | 1.60 × 10−5 | 96.27409 | 1 |
| TF | −0.36242 | 12.94521 | 0.59287 | 0.368999 | 2.72 × 10−5 | 95.93737 | 1 |
| TF | −0.37269 | 23.30685 | 0.589095 | 0.22655 | 1.72 × 10−5 | 96.32111 | 1 |
| TF | −0.38235 | 11.15069 | 0.55248 | 0.184192 | 1.70 × 10−5 | 95.99607 | 1 |
| TF | −0.37201 | 23.30685 | 0.553574 | 0.112416 | 2.19 × 10−5 | 97.03808 | 1 |
| TF | −0.37854 | 12.33151 | 0.665211 | 0.251212 | 2.17 × 10−5 | 96.24612 | 1 |
| TF | −0.41557 | 10.27397 | 0.534546 | 0.178508 | 2.16 × 10−5 | 96.16103 | 1 |
| TF | −0.41685 | 23.30685 | 0.561889 | 0.199097 | 1.80 × 10−5 | 96.30936 | 1 |
| TF | −0.41672 | 10.75616 | 0.560494 | 0.169953 | 2.24 × 10−5 | 96.15482 | 1 |
| TF | −0.40322 | 13.33973 | 0.295362 | 0.09462 | 1.64 × 10−5 | 97.41273 | 1 |
| TF | −0.43973 | 23.30685 | 0.570338 | 0.228854 | 1.47 × 10−5 | 96.30936 | 1 |
| TF | −0.41507 | 23.30685 | 0.522161 | 0.207258 | 1.56 × 10−5 | 96.20358 | 1 |
| TF | −0.45598 | 23.30685 | 0.560614 | 0.209294 | 1.73 × 10−5 | 96.32111 | 1 |
| TF | −0.48716 | 4.79726 | 0.691486 | 0.300189 | 0.000124 | 94.97717 | 0 |
| TF | −0.45247 | 23.30685 | 0.560478 | 0.205325 | 1.56 × 10−5 | 96.41514 | 1 |
| Dataset | RF | SVM | ||
|---|---|---|---|---|
| Predictive Variables | Accuracy (%) | Predictive Variables | Accuracy (%) | |
| All-forest | Baseline | 76.78 ± 0.87 | Baseline | 76.78 ± 0.87 |
| Magnitude | 70.64 ± 0.84 | Magnitude | 73.7 ± 0.96 | |
| Magnitude + trend | 84.15 ± 0.56 | Magnitude + trend | 86.45 ± 0.64 | |
| Magnitude + trend + model fitting period | 85.45 ± 0.66 | Magnitude + trend + model fitting period | 87.35 ± 0.59 | |
| Magnitude + trend + model fitting period + amplitude | 85.62 ± 0.68 | Magnitude + trend + model fitting period + forest-type | 86.02 ± 0.67 | |
| Magnitude + trend + model fitting period + amplitude + data quality | 85.87 ± 0.76 | Magnitude + trend + model fitting period + forest-type + data quality | 87 ± 0.61 | |
| Magnitude + trend + model fitting period + amplitude + data quality + R2 | 85.52 ± 0.76 | Magnitude + trend + model fitting period + forest-type + data quality + amplitude | 87.89 ± 0.71 | |
| Magnitude + trend + model fitting period + amplitude + data quality + R2 + forest-type | 85.04 ± 0.8 | Magnitude + trend + model fitting period + forest-type + data quality + amplitude + R2 | 86.56 ± 0.67 | |
| TDF | Baseline | 71.04 ± 1.08 | Baseline | 71.04 ± 1.08 |
| Magnitude | 61.48 ± 1.25 | Magnitude | 66.9 ± 1.12 | |
| Magnitude + trend | 79.17 ± 1.06 | Magnitude + trend | 81.93 ± 1.03 | |
| Magnitude + trend + amplitude | 80.96 ± 0.93 | Magnitude + trend + model fitting period | 81.9 ± 1.01 | |
| Magnitude + trend + amplitude + data quality | 81.38 ± 1 | Magnitude + trend + model fittingperiod + data quality | 84.22 ± 1.02 | |
| Magnitude + trend + amplitude + data quality + R2 | 81.93 ± 0.93 | Magnitude + trend + model fitting period+ data quality + R2 | 84.58 ± 0.98 | |
| Magnitude + trend + amplitude + data quality + R2 + model fitting period | 80.29 ± 1.04 | Magnitude + trend + model fitting period+ data quality + R2 + amplitude | 83.41 ± 1.04 | |
| TF | Baseline | 84.75 ± 1.17 | Baseline | 84.75 ± 1.17 |
| Magnitude | 79.46 ± 1.22 | Magnitude | 80.04 ± 1.15 | |
| Magnitude + data quality | 85.85 ± 1.2 | Magnitude + model fitting period | 85.97 ± 1.15 | |
| Magnitude + data quality + trend | 85.65 ± 1.16 | Magnitude + model fitting period + trend | 85.89 ± 1.07 | |
| Magnitude + data quality + trend + model fitting period | 85.28 ± 1.09 | Magnitude + model fitting period + trend + data quality | 86.55 ± 1.03 | |
| Magnitude + data quality + trend + model fitting period + R2 | 84.82 ± 1.16 | Magnitude + model fitting period + trend + data quality + R2 | 86.23 ± 1.1 | |
| Magnitude + data quality + trend + model fitting period + R2 + amplitude | 84.64 ± 1.18 | Magnitude + model fitting period + trend + data quality + R2 + amplitude | 85.43 ± 1.11 |
References
- Frolking, S.; Palace, M.W.; Clark, D.B.; Chambers, J.Q.; Shugart, H.H.; Hurtt, G.C. Forest disturbance and recovery: A general review in the context of spaceborne remote sensing of impacts on aboveground biomass and canopy structure. J. Geophys. Res. Biogeosciences 2009, 114, G00E02. [Google Scholar] [CrossRef]
- van der Werf, G.R.; Morton, D.C.; DeFries, R.S.; Olivier, J.G.J.; Kasibhatla, P.S.; Jackson, R.B.; Collatz, G.J.; Randerson, J.T. CO2 emissions from forest loss. Nat. Geosci. 2009, 2, 737–738. [Google Scholar] [CrossRef]
- FAO. Assessing Forest Degradation. Towards the Development of Globally Applicable Guidelines; FAO: Roma, Italy, 2011. [Google Scholar]
- Collins, M.; Knutti, R.; Arblaster, J.; Dufresne, J.-L.; Fichefet, T.; Friedlingstein, P.; Gao, X.; Gutowski, W.J.; Johns, T.; Krinner, G.; et al. Long-term Climate Change: Projections, Commitments and Irreversibility. In Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Stocker, T.F., Qin, D., Plattner, G.-K., Tignor, M., Allen, S.K., Boschung, J., Nauels, A., Xia, Y., Bex, V., Midgley, P.M., Eds.; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Clark, D. The Role of Disturbance in the Regeneration of Neotropical Moist Forests. In Reproductive Ecology of Tropical Forest Plants; Bawa, K.S., Hadley, M., Eds.; UNESCO, Parthenon Publishing Group: Halifax, UK, 1990. [Google Scholar]
- Chuvieco, E.; Aguado, I.; Salas, J.; García, M.; Yebra, M.; Oliva, P. Satellite Remote Sensing Contributions to Wildland Fire Science and Management. Curr. For. Rep. 2020, 6, 81–96. [Google Scholar] [CrossRef]
- Dutrieux, L.P.; Jakovac, C.C.; Latifah, S.H.; Kooistra, L. Reconstructing land use history from Landsat time-series: Case study of a swidden agriculture system in Brazil. Int. J. Appl. Earth Obs. Geoinf. 2016, 47, 112–124. [Google Scholar] [CrossRef]
- FAO. Global Forest Resources Assessment; FAO: Rome, Italy, 2020. [Google Scholar]
- Vieilledent, G.; Grinand, C.; Rakotomalala, F.A.; Ranaivosoa, R.; Rakotoarijaona, J.R.; Allnutt, T.F.; Achard, F. Combining global tree cover loss data with historical national forest cover maps to look at six decades of deforestation and forest fragmentation in Madagascar. Biol. Conserv. 2018, 222, 189–197. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Yang, Z.; Cohen, W.B. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. LandTrendr—Temporal segmentation algorithms. Remote Sens. Environ. 2010, 114, 2897–2910. [Google Scholar] [CrossRef]
- Verbesselt, J.; Hyndman, R.; Newnham, G.; Culvenor, D. Detecting trend and seasonal changes in satellite image time series. Remote Sens. Environ. 2010, 114, 106–115. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E.; Olofsson, P. Continuous monitoring of forest disturbance using all available Landsat imagery. Remote Sens. Environ. 2012, 122, 75–91. [Google Scholar] [CrossRef]
- Hirschmugl, M.; Gallaun, H.; Dees, M.; Datta, P.; Deutscher, J.; Koutsias, N.; Schardt, M. Methods for Mapping Forest Disturbance and Degradation from Optical Earth Observation Data: A Review. Curr. For. Rep. 2017, 3, 32–45. [Google Scholar] [CrossRef] [Green Version]
- Schneibel, A.; Stellmes, M.; Röder, A.; Frantz, D.; Kowalski, B.; Haß, E.; Hill, J. Assessment of spatio-temporal changes of smallholder cultivation patterns in the Angolan Miombo belt using segmentation of Landsat time series. Remote Sens. Environ. 2017, 195, 118–129. [Google Scholar] [CrossRef] [Green Version]
- Chi, M.; Plaza, A.; Benediktsson, J.A.; Sun, Z.; Shen, J.; Zhu, Y. Big Data for Remote Sensing: Challenges and Opportunities. Proc. IEEE 2016, 104, 2207–2219. [Google Scholar] [CrossRef]
- Xiao, J.; Chevallier, F.; Gomez, C.; Guanter, L.; Hicke, J.A.; Huete, A.R.; Ichii, K.; Ni, W.; Pang, Y.; Rahman, A.F.; et al. Remote sensing of the terrestrial carbon cycle: A review of advances over 50 years. Remote Sens. Environ. 2019, 233, 111383. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Sheykhmousa, M.; Mahdianpari, M.; Ghanbari, H.; Mohammadimanesh, F.; Ghamisi, P.; Homayouni, S. Support Vector Machine Versus Random Forest for Remote Sensing Image Classification: A Meta-Analysis and Systematic Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6308–6325. [Google Scholar] [CrossRef]
- Camargo, F.F.; Sano, E.E.; Almeida, C.M.; Mura, J.C.; Almeida, T. A comparative assessment of machine-learning techniques for land use and land cover classification of the Brazilian tropical savanna using ALOS-2/PALSAR-2 polarimetric images. Remote Sens. 2019, 11, 1600. [Google Scholar] [CrossRef] [Green Version]
- Grinand, C.; Rakotomalala, F.; Gond, V.; Vaudry, R.; Bernoux, M.; Vieilledent, G. Estimating deforestation in tropical humid and dry forests in Madagascar from 2000 to 2010 using multi-date Landsat satellite images and the random forests classifier. Remote Sens. Environ. 2013, 139, 68–80. [Google Scholar] [CrossRef]
- Dlamini, W.M. Analysis of deforestation patterns and drivers in Swaziland using efficient Bayesian multivariate classifiers. Modeling Earth Syst. Environ. 2016, 2, 1–14. [Google Scholar] [CrossRef]
- Ali, I.; Greifeneder, F.; Stamenkovic, J.; Neumann, M.; Notarnicola, C. Review of machine learning approaches for biomass and soil moisture retrievals from remote sensing data. Remote Sens. 2015, 7, 16398–16421. [Google Scholar] [CrossRef] [Green Version]
- Wu, L.; Li, Z.; Liu, X.; Zhu, L.; Tang, Y.; Zhang, B.; Xu, B.; Liu, M.; Meng, Y.; Liu, B. Multi-type forest change detection using BFAST and monthly landsat time series for monitoring spatiotemporal dynamics of forests in subtropical wetland. Remote Sens. 2020, 12, 341. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Yu, L.; Peng, D.; Zhao, J.; Cheng, Y.; Liu, X.; Li, W.; Meng, R.; Xu, X.; Gong, P. Annual 30-m land use/land cover maps of China for 1980–2015 from the integration of AVHRR, MODIS and Landsat data using the BFAST algorithm. Sci. China Earth Sci. 2020, 63, 1390–1407. [Google Scholar] [CrossRef]
- Fang, X.; Zhu, Q.; Ren, L.; Chen, H.; Wang, K.; Peng, C. Large-scale detection of vegetation dynamics and their potential drivers using MODIS images and BFAST: A case study in Quebec, Canada. Remote Sens. Environ. 2018, 206, 391–402. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef] [Green Version]
- Simoes, R.; Camara, G.; Queiroz, G.; Souza, F.; Andrade, P.R.; Santos, L.; Carvalho, A.; Ferreira, K. Satellite Image Time Series Analysis for Big Earth Observation Data. Remote Sens. 2021, 13, 2428. [Google Scholar] [CrossRef]
- Schultz, M.; Shapiro, A.; Clevers, J.G.P.W.; Beech, C.; Herold, M. Forest cover and vegetation degradation detection in the Kavango Zambezi Transfrontier Conservation area using BFAST monitor. Remote Sens. 2018, 10, 1850. [Google Scholar] [CrossRef] [Green Version]
- Verbesselt, J.; Zeileis, A.; Herold, M. Near real-time disturbance detection using satellite image time series. Remote Sens. Environ. 2012, 123, 98–108. [Google Scholar] [CrossRef]
- Gao, Y.; Solórzano, J.V.; Quevedo, A.; Loya-Carrillo, J.O. How BFAST Trend and Seasonal Model Components Affect Disturbance Detection in Tropical Dry Forest and Temperate Forest. Remote Sens. 2021, 2, 2033. [Google Scholar] [CrossRef]
- Grogan, K.; Pflugmacher, D.; Hostert, P.; Verbesselt, J.; Fensholt, R. Mapping clearances in tropical dry forests using breakpoints, trend, and seasonal components from modis time series: Does forest type matter? Remote Sens. 2016, 8, 657. [Google Scholar] [CrossRef] [Green Version]
- Watts, L.M.; Laffan, S.W. Effectiveness of the BFAST algorithm for detecting vegetation response patterns in a semi-arid region. Remote Sens. Environ. 2014, 154, 234–245. [Google Scholar] [CrossRef]
- Trejo, I.; Dirzo, R. Deforestation of seasonally dry tropical forest: A national and local analysis in Mexico. Biol. Conserv. 2000, 94, 133–142. [Google Scholar] [CrossRef]
- de la Barreda-Bautista, B.; López-Caloca, A.A.; Couturier, S.; Silván-Cárdenas, J.L. Tropical Dry Forests in the Global Picture: The Challenge of Remote Sensing-Based Change Detection in Tropical Dry Environments; Carayannis, E., Ed.; InTech: Rijeka, Croatia, 2011; pp. 231–256. [Google Scholar]
- GOFC-GOLD. A Sourcebook of Methods and Procedures for Monitoring and Reporting Anthropogenic Greenhouse; GOFC-GOLD Report Version COP21-1; Wageningen University: Wageningen, The Netherlands, 2016; pp. 1–266. [Google Scholar]
- Jakovac, C.C.; Dutrieux, L.P.; Siti, L.; Peña-Claros, M.; Bongers, F. Spatial and temporal dynamics of shifting cultivation in the middle-Amazonas river: Expansion and intensification. PLoS ONE 2017, 12, e0181092. [Google Scholar] [CrossRef]
- Cuevas, R.N.N.; Guzmán, H.L. El Bosque Tropical Caducifolio En La Reserva de La Biosfera Sierra Manantlan, Jalisco-Colima, Mexico. Bol. IBUG 1998, 5, 445–491. [Google Scholar]
- Borrego, A.; Skutsch, M. How Socio-Economic Differences Between Farmers Affect Forest Degradation in Western Mexico. Forests 2019, 10, 893. [Google Scholar] [CrossRef] [Green Version]
- DeVries, B.; Verbesselt, J.; Kooistra, L.; Herold, M. Robust monitoring of small-scale forest disturbances in a tropical montane forest using Landsat time series. Remote Sens. Environ. 2015, 161, 107–121. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Hamunyela, E.; Verbesselt, J.; Bruin, S.d.; Herold, M. Monitoring deforestation at sub-annual scales as extreme events in landsat data cubes. Remote Sens. 2016, 8, 651. [Google Scholar] [CrossRef]
- Schultz, M.; Clevers, J.G.P.W.; Carter, S.; Verbesselt, J.; Avitabile, V.; Quang, H.V.; Herold, M. Performance of vegetation indices from Landsat time series in deforestation monitoring. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 318–327. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Boser, B.; Guyon, I.; Vapnik, V. A Training Algorithm for Optimal Margin Classifiers. In Proceedings of the Fifth Annual Workshop on Computational Learning Theory, Pittsburgh, PA, USA, 27–29 July 1992. [Google Scholar]
- Dabija, A.; Kluczek, M.; Zagajewski, B.; Raczko, E.; Kycko, M.; Al-Sulttani, A.H.; Tardà, A.; Pineda, L.; Corbera, J. Comparison of support vector machines and random forests for corine land cover mapping. Remote Sens. 2021, 13, 777. [Google Scholar] [CrossRef]
- Simoes, R.; Picoli, M.C.A.; Camara, G.; Maciel, A.; Santos, L.; Andrade, P.R.; Sánchez, A.; Ferreira, K.; Carvalho, A. Land use and cover maps for Mato Grosso State in Brazil from 2001 to 2017. Sci. Data 2020, 7, 34. [Google Scholar] [CrossRef] [Green Version]
- Karatzoglou, A.; Smola, A.; Hornik, K.; Zeileis, A. kernlab. An S4 Package for Kernel Methods in R. J. Stat. Softw. 2004, 11, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Kuhn, M. Caret: Classification and Regression Training. 2021. Available online: https://CRAN.R-project.org/package=caret (accessed on 10 December 2021).
- Card, D.H. Using Known Map Category Marginal Frequencies To Improve Estimates of Thematic Map Accuracy. Photogramm. Eng. Remote Sens. 1982, 48, 431–439. [Google Scholar]
- Maxwell, A.E.; Warner, T.A.; Guillén, L.A. Accuracy assessment in convolutional neural network-based deep learning remote sensing studies—Part 2: Recommendations and best practices. Remote Sens. 2021, 13, 2591. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A Probabilistic Interpretation of Precision, Recall and F-Score, with Implication for Evaluation. Lect. Notes Comput. Sci. 2005, 3408, 345–359. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Kuhn, M.; Wickham, H. Tidymodels: A Collection of Packages for Modeling and Machine Learning Using Tidyverse Principles. 2020. Available online: https://www.tidymodels.org (accessed on 10 December 2021).
- Kuhn, M.; Vaughan, D. Yardstick: Tidy Characterizations of Model Performance. 2021. Available online: https://CRAN.R-project.org/package=yardstick (accessed on 10 December 2021).
- Pebesma, E. Simple Features for R: Standardized Support for Spatial Vector Data. R J. 2018, 10, 439–446. [Google Scholar] [CrossRef] [Green Version]
- Hijmans, R.J. Raster: Geographic Data Analysis and Modeling. 2021. Available online: https://CRAN.R-project.org/package=raster (accessed on 10 December 2021).
- Wickham, H.; Averick, M.; Bryan, J.; Chang, W.; D’Agostino McGowan, L.; François, R.; Grolemund, G.; Hayes, A.; Henry, L.; Hester, J.; et al. Tidyverse. J. Open Source Softw. 2019, 4, 1686. [Google Scholar] [CrossRef]
- Heydari, S.S.; Mountrakis, G. Effect of classifier selection, reference sample size, reference class distribution and scene heterogeneity in per-pixel classification accuracy using 26 Landsat sites. Remote Sens. Environ. 2017, 204, 648–658. [Google Scholar] [CrossRef]
- Vabalas, A.; Gowen, E.; Poliakoff, E.; Casson, A.J. Machine learning algorithm validation with a limited sample size. PLoS ONE 2019, 14, e0224365. [Google Scholar] [CrossRef]
- Schultz, M.; Verbesselt, J.; Avitabile, V.; Souza, C.; Herold, M. Error Sources in Deforestation Detection Using BFAST Monitor on Landsat Time Series Across Three Tropical Sites. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3667–3679. [Google Scholar] [CrossRef]
- Geng, L.; Che, T.; Wang, X.; Wang, H. Detecting spatiotemporal changes in vegetation with the BFAST model in the Qilian Mountain region during 2000–2017. Remote Sens. 2019, 11, 103. [Google Scholar] [CrossRef] [Green Version]
- Roy, D.P.; Kovalskyy, V.; Zhang, H.K.; Vermote, E.F.; Yan, L.; Kumar, S.S.; Egorov, A. Characterization of Landsat-7 to Landsat-8 reflective wavelength and normalized difference vegetation index continuity. Remote Sens. Environ. 2016, 185, 57–70. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hirschmugl, M.; Deutscher, J.; Sobe, C.; Bouvet, A.; Mermoz, S.; Schardt, M. Use of SAR and Optical Time Series for Tropical Forest Disturbance Mapping. Remote Sens. 2020, 12, 727. [Google Scholar] [CrossRef] [Green Version]
- Ma, W.; Gong, C.; Hu, Y.; Meng, P.; Xu, F. The Hughes Phenomenon in Hyperspectral Classification Based on the Ground Spectrum of Grasslands in the Region around Qinghai Lake. In International Symposium on Photoelectronic Detection and Imaging 2013: Imaging Spectrometer Technologies and Applications; International Society for Optics and Photonics: Bellingham, WA, USA, 2013; Volume 8910, p. 89101G. [Google Scholar] [CrossRef]
- Herold, M.; Román-Cuesta, R.M.; Mollicone, D.; Hirata, Y.; Van Laake, P.; Asner, G.P.; Souza, C.; Skutsch, M.; Avitabile, V.; MacDicken, K. Options for monitoring and estimating historical carbon emissions from forest degradation in the context of REDD+. Carbon Balance Manag. 2011, 6, 13. [Google Scholar] [CrossRef] [PubMed] [Green Version]


| Seasonal and Trend Model Components | Definition | Equation |
|---|---|---|
| Magnitude | The absolute value of the difference between the observed and projected NDVI | |
| Trend | The trend of the linear model that was fitted in the stable historical data period | |
| Amplitude | The difference between the maximum and minimum NDVI of the detrended model | |
| Goodness-of-fit | The goodness-of-fit of the fitted model measured by R2 | |
| Model fitting period | The length in years of the stable historical data period, corresponding to the time window to which the BFAST model is fitted | |
| Data quality | The number of valid observations over the total observations in the stable historical data period |
| Disturbance | Non-Disturbance | |
|---|---|---|
| Disturbance | TP | FP |
| Non-disturbance | FN | TN |
| Three Forest Stratum | Random Forests (RF) | Support Vector Machine (SVM) | Accuracy (%; RF vs. SVM) |
|---|---|---|---|
| All-forest | Magnitude, trend, model fitting period | Magnitude, trend, model fitting period | 75.71 vs. 80.00 |
| TDF | Magnitude, trend, amplitude | Magnitude, trend, model fitting period, data quality | 80.49 vs. 75.61 |
| TF | Magnitude, data quality | Magnitude, model fitting period | 86.21 vs. 79.31 |
| Dataset | Evaluation Metric | RF & SVM (%) | RF (%) | SVM (%) | ΔRF vs. SVM (%) | ||
|---|---|---|---|---|---|---|---|
| Baseline | Best | Δ Best vs. Baseline | Best | ΔBest vs. Baseline | |||
| All-Forest | Accuracy | 68.57 | 75.71 | 7.14 | 80.00 | 11.43 | −4.29 |
| F1-score | 65.63 | 66.67 | 1.04 | 74.07 | 8.45 | −7.40 | |
| ROC AUC | 69.64 | 81.16 | 11.52 | 90.14 | 20.49 | −8.98 | |
| Tropical Dry Forest (TDF) | Accuracy | 58.54 | 80.49 | 21.95 | 75.61 | 17.07 | 4.88 |
| F1-score | 51.43 | 69.23 | 17.80 | 54.55 | 3.12 | 14.68 | |
| ROC AUC | 59.92 | 88.36 | 28.44 | 79.63 | 19.71 | 8.73 | |
| Temperate Forest (TF) | Accuracy | 79.31 | 86.21 | 6.90 | 79.31 | 0.00 | 6.90 |
| F1-score | 81.25 | 86.67 | 5.42 | 78.57 | 2.68 | 8.10 | |
| ROC AUC | 79.76 | 90.24 | 10.48 | 91.90 | 12.14 | −1.66 | |
| Non-Disturbance | Disturbance | User’s Accuracy (%) | |
|---|---|---|---|
| Non-disturbance | 506 | 14 | 97.31 |
| Disturbance | 18 | 86 | 82.69 |
| Producer’s accuracy (%) | 96.56 | 86.00 | |
| Overall accuracy (%) | 94.87 | ||
| Area and weighted area estimates | |||
| Area proportion (%) | 99.48 | 0.52 | |
| Map area (ha) | 175,436.37 | 912.06 | |
| Unbiased area estimate (ha) | 170,870.94 | 5477.49 | |
| Standard Error (SE) | 1246.90 | 1246.90 | |
| Weighted producer’s accuracy (%) | 99.91 | 13.77 | |
| Weighted overall accuracy (%) | 97.23 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Solórzano, J.V.; Gao, Y. Forest Disturbance Detection with Seasonal and Trend Model Components and Machine Learning Algorithms. Remote Sens. 2022, 14, 803. https://doi.org/10.3390/rs14030803
Solórzano JV, Gao Y. Forest Disturbance Detection with Seasonal and Trend Model Components and Machine Learning Algorithms. Remote Sensing. 2022; 14(3):803. https://doi.org/10.3390/rs14030803
Chicago/Turabian StyleSolórzano, Jonathan V., and Yan Gao. 2022. "Forest Disturbance Detection with Seasonal and Trend Model Components and Machine Learning Algorithms" Remote Sensing 14, no. 3: 803. https://doi.org/10.3390/rs14030803
APA StyleSolórzano, J. V., & Gao, Y. (2022). Forest Disturbance Detection with Seasonal and Trend Model Components and Machine Learning Algorithms. Remote Sensing, 14(3), 803. https://doi.org/10.3390/rs14030803