
Spatio-Temporal Quality Indicators for Differential Interferometric Synthetic Aperture Radar Data

 , , ,
, , ,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
Quality Indices
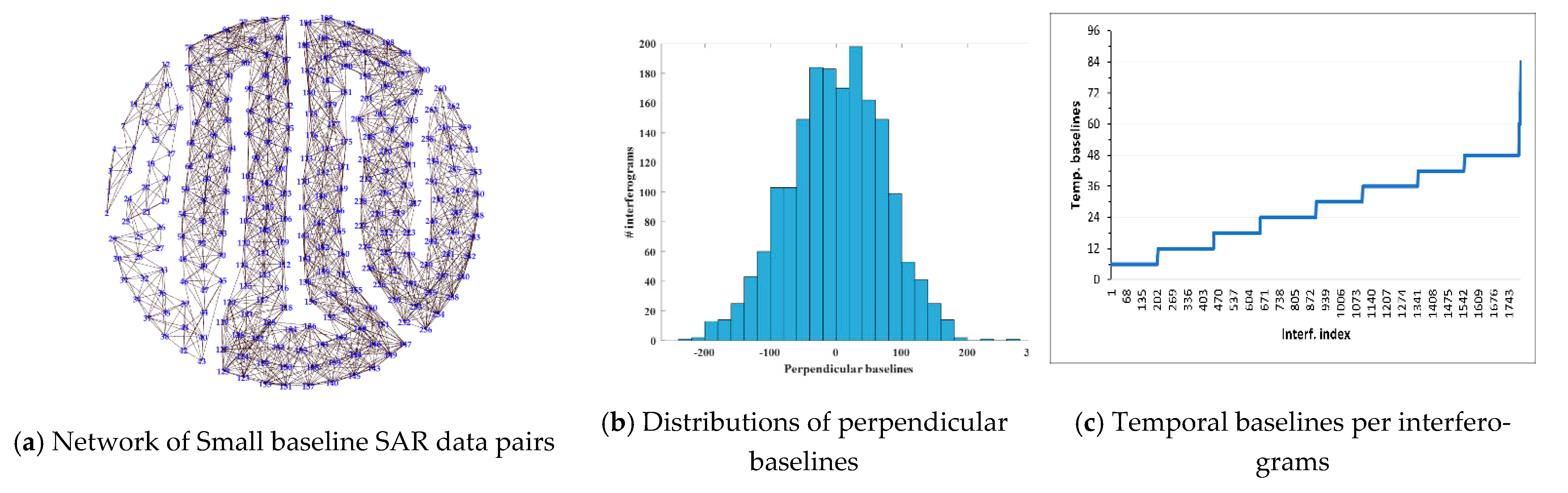
2. Datasets and Tools
3. Methods
- stands for the phase difference resulting from the displacement of the target point that occurred between image acquisitions dates, is the component of displacement vector along the line-of-sight direction and λ denotes the radar wavelength.
- refers the residual topography induced on phase, is the difference in height between the DEM and effective target. is the interferometric perpendicular baseline, is the looking angle and the slant-range distance from the sensor to target.
- is the phase component due to the variation of a medium of signal propagation between image acquisitions.
- is for phase noise—due to temporal decorrelation, soil moisture, and thermal noise and in general due to all ambient influence that apport little and uncorrelated variation of phase.
- in is the phase ambiguity due to the wrapped nature of phase measurements.
3.1. Post Unwrapping Phase Estimation
- LS estimation, computing the residuals.
- Temporally removing the highest outlier candidate from the network and performing a new LS estimation. The observation is considered as an outlier candidate when the corresponding residual is greater than the residual threshold.
- Checking the residual of the outlier candidate: if it is a multiple of 2π (within a given tolerance), the observation is corrected and reaccepted. For unwrapping tolerance, if an error lies within then it is considered as an unwrapping error and will be corrected. Otherwise, the decision of re-entering or rejecting the outlier candidate is based on the comparison of its old and new residuals.
- The procedure is executed iteratively for each observation until there are no remaining outlier candidates.
3.2. Proposed Quality Indicators
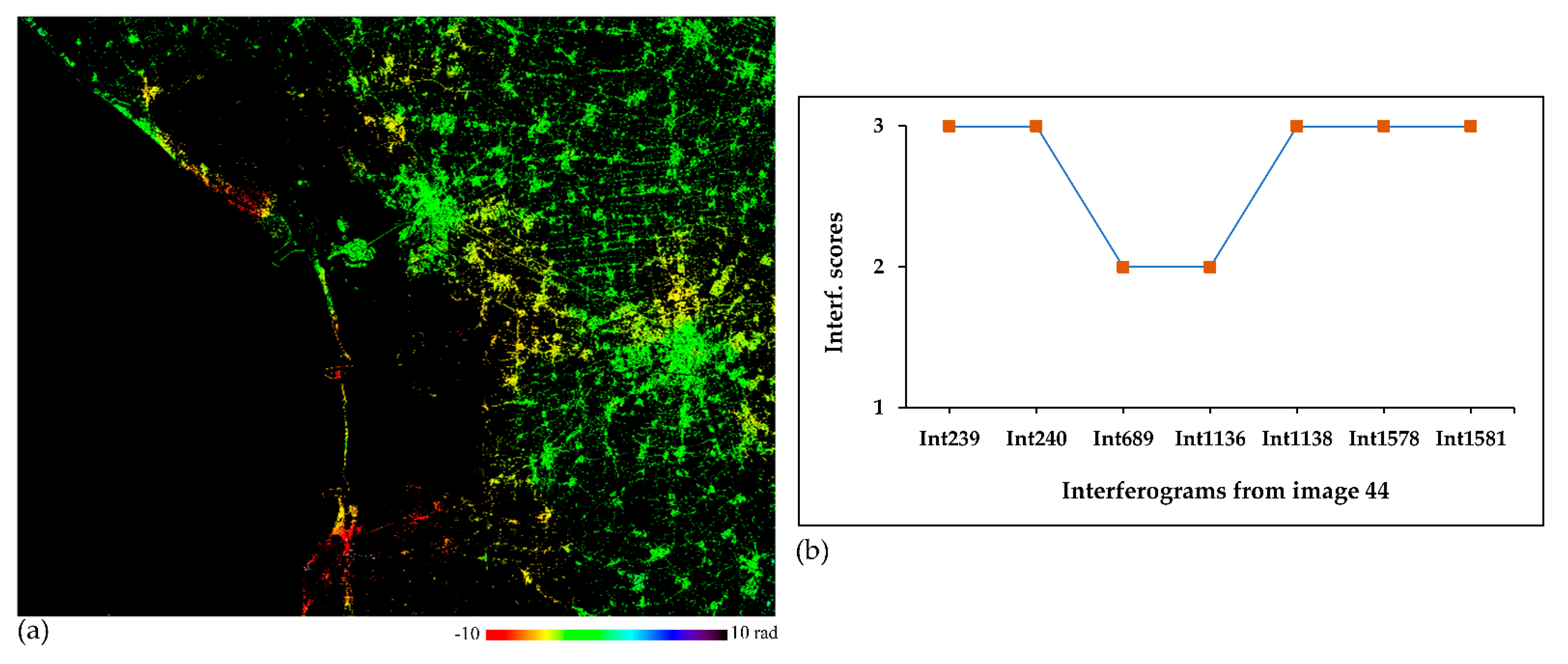
- Interferogram score ()—a score assigned to interferograms. It indicates the global effect of PhU errors per interferogram. If needed, the interferogram scores would be used to exclude affected interferograms, if any, and hence to update the network and recompute the estimation.
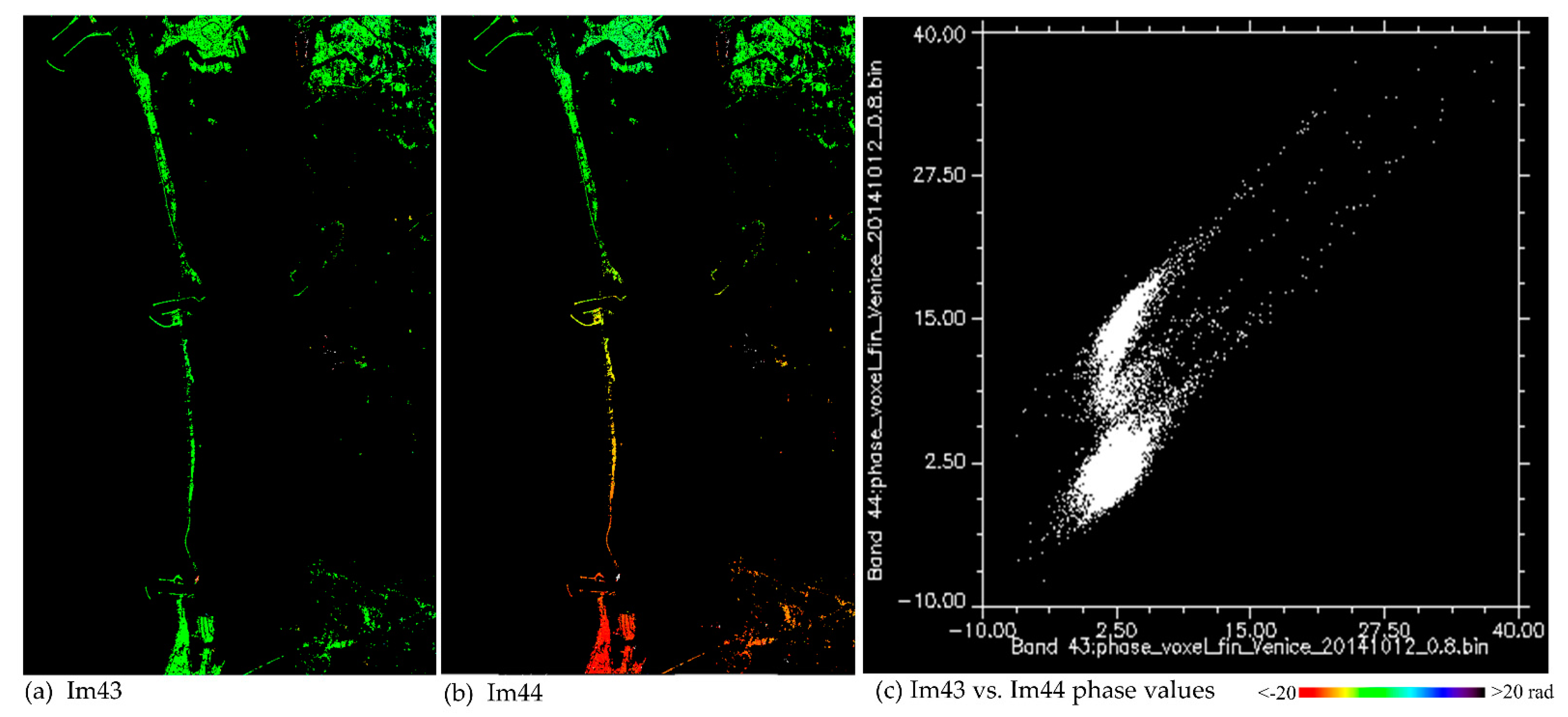
- Image score ()—a score assigned to images. As with the case of interferograms, shows spatially global effects. This score could also be used to remove one or more images, adjust the network and recompute the estimation.
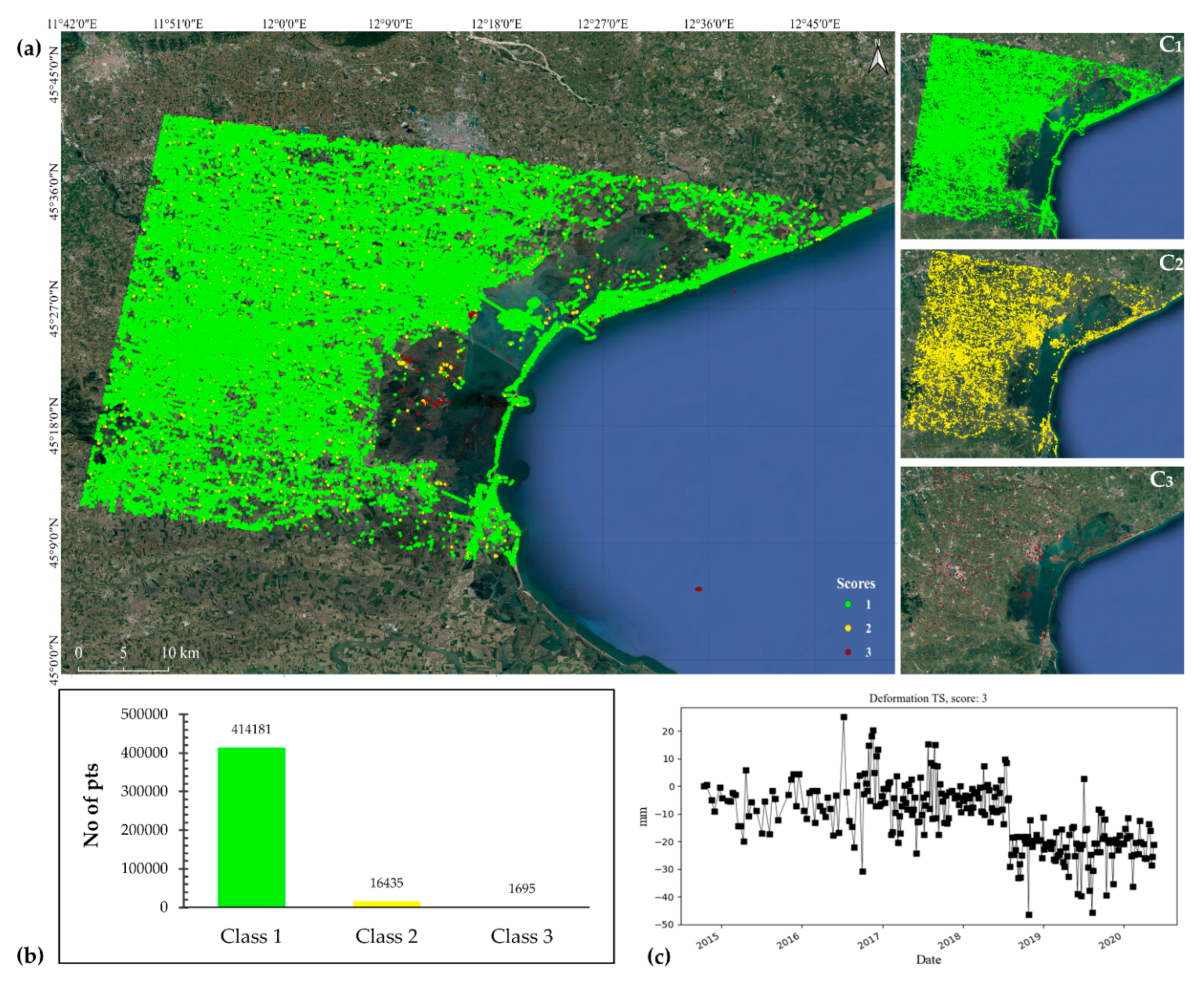
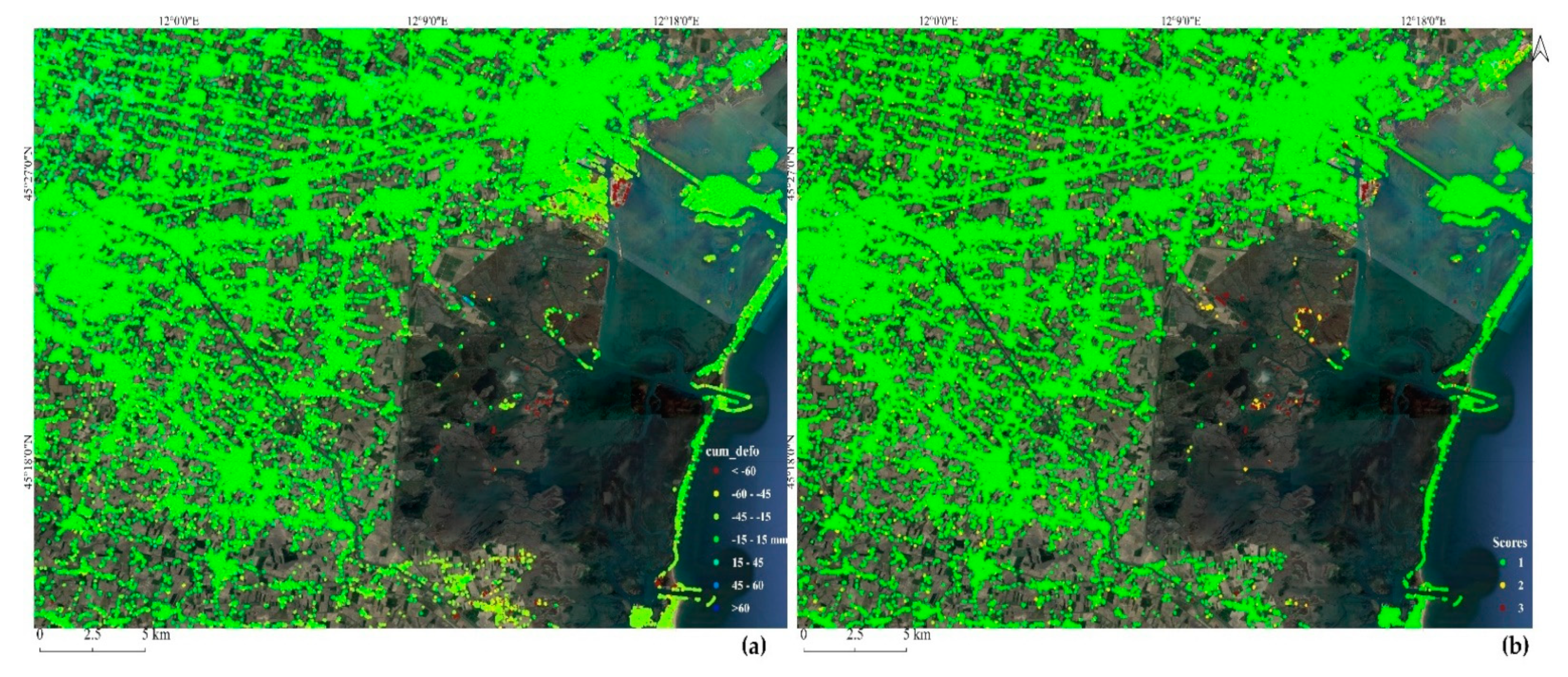
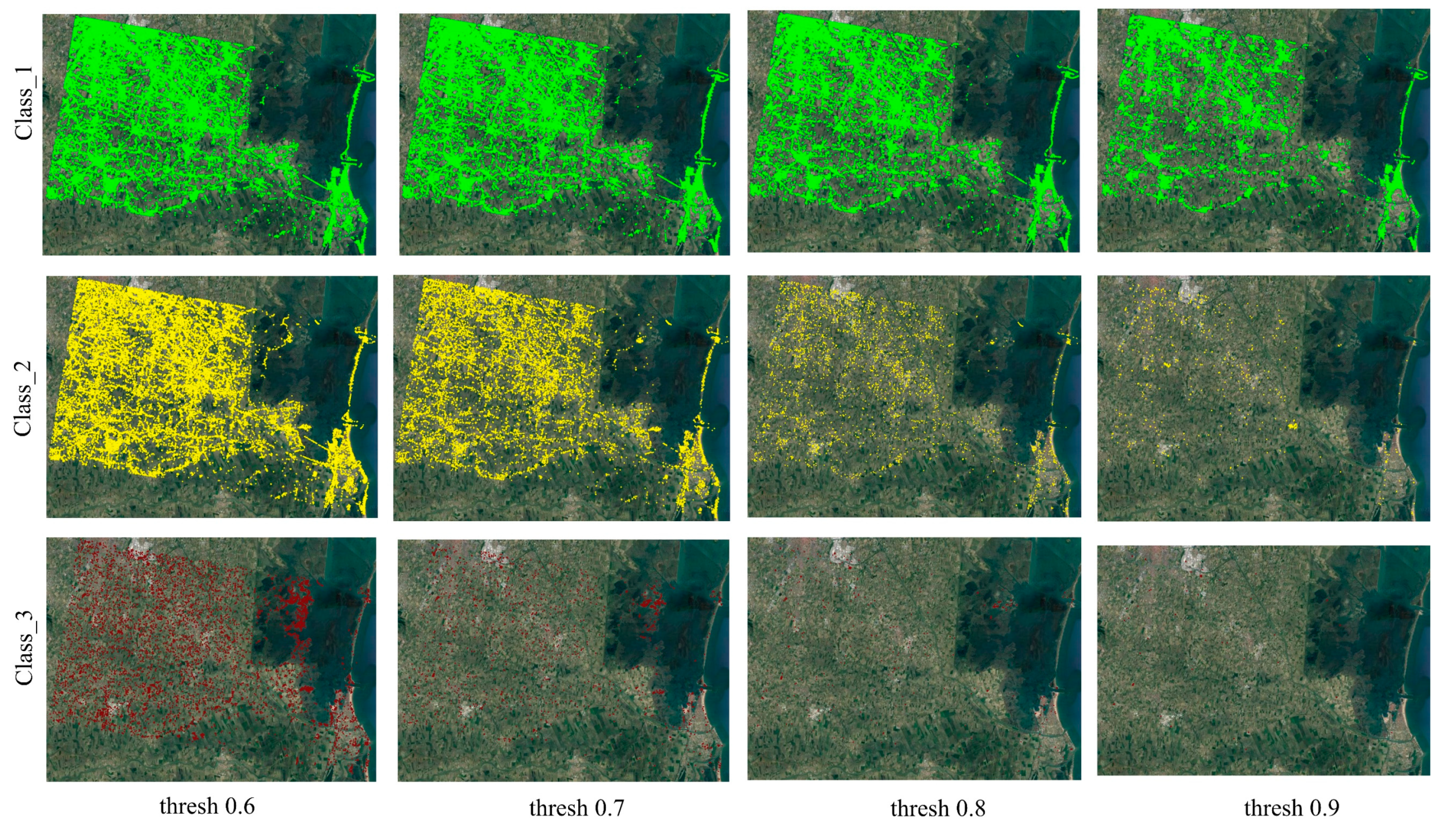
- Point score ()—a score assigned to each measurement point. It defines spatially local and temporally global characteristics of a point. The score also provides supplementary information in the interpretation of TS results by separating reliable points from unreliable ones.
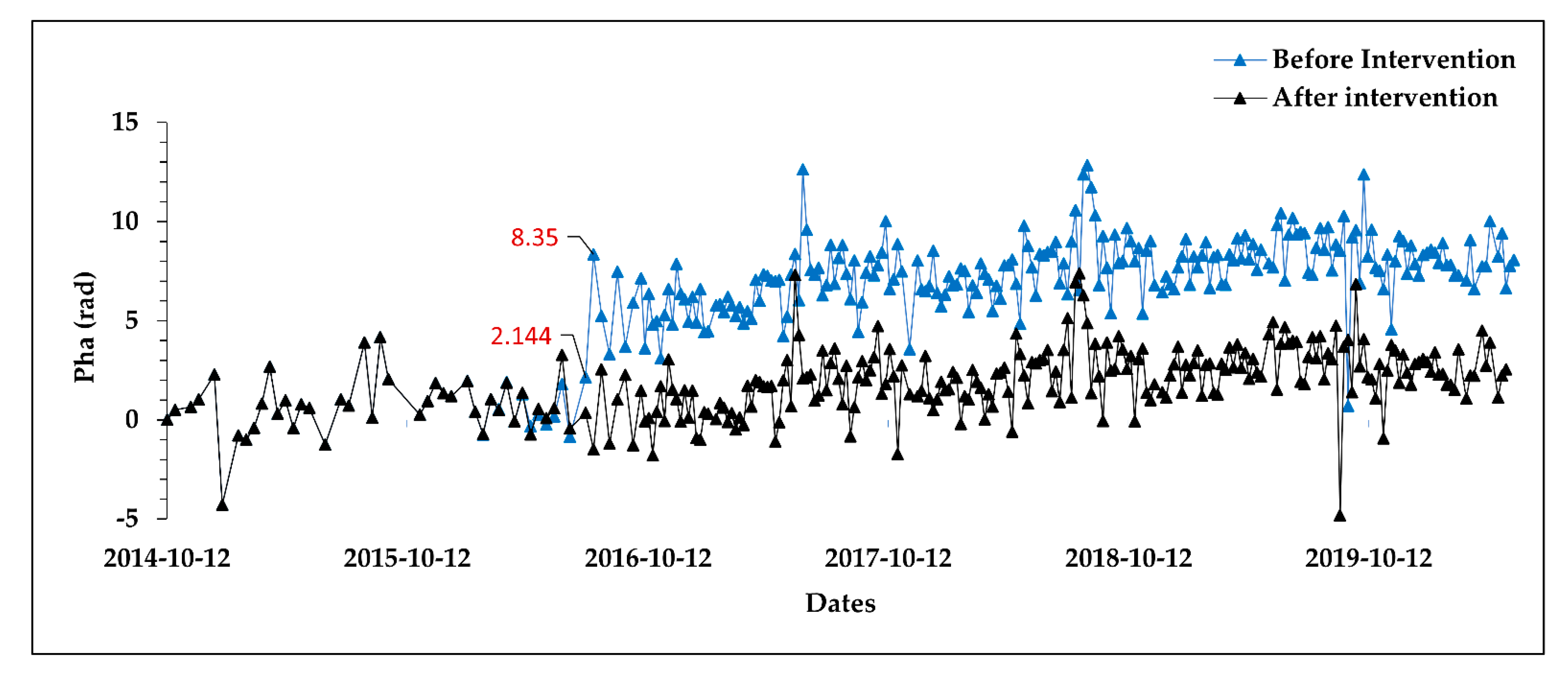
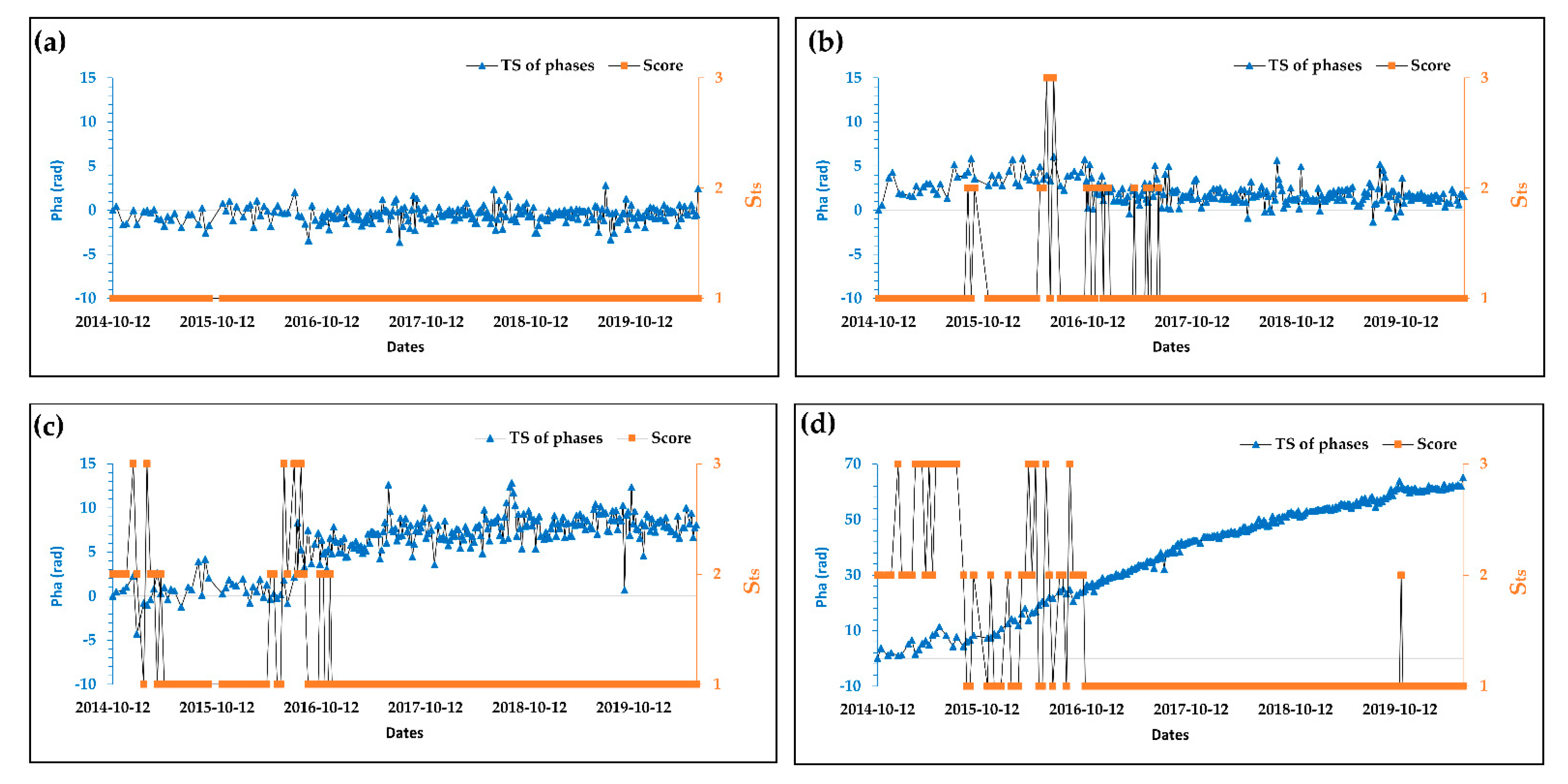
- TS scores ()—a detailed score associated with each date of SAR image acquisitions within a given TS of a point. This score indicates temporally local as well as spatially local effects of PhU error influences.
- Computing residuals from the first LS estimation Equation (4).
- Defining a binary matrix of order based on the piecewise function :for and . While stands for the residual of point and interferogram, and denotes the residual threshold.
- Compute a matrix of order whose entries are obtained from as:where represents the number of interferograms connected to image in the network.
- Values of the matrix derived in Equation (11) are then multiplied by the corresponding weights assigned per image—multiplicative inverses of the number of interferograms in the network associated with each image.for also holds.
- The resulting weighted matrix , Equation (12), is finally analysed to get scores for PSs and images. These scores correspond to three classes denoted by , and that are considered as quality indicators.
4. Results and Discussion
Points Score- for Point Selection
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CTTC | Centre Tecnològic de Telecomunicacions de Catalunya |
| DEM | Digital Elevation Model |
| DInSAR | Differential Interferometric Synthetic Aperture Radar |
| DS | Distributed Scatterer |
| ESA | European Space Agency |
| GNSS | Global Navigation Satellite Systems |
| InSAR | Interferometric Synthetic Aperture Radar |
| LS | Least Squared |
| NASA | National Aeronautics and Space Administration |
| PhU | Phase Unwrapping |
| PS | Persistent Scatterer |
| PSI | Persistent Scatterer Interferometry |
| PSIG | Persistent Scatterers Interferometry processing chain of the Geomatics division of CTTC. |
| QI | Quality Indicator |
| SAR | Synthetic Aperture Radar |
| SBAS | Small BAseline Subset |
| SLC | Single Look Complex |
| STC | Spatio-temporal Consistency |
| SVD | Singular Value Decomposition |
| TS | Time Series |
References
- Pepe, A.; Calò, F. A Review of Interferometric Synthetic Aperture RADAR (InSAR) Multi-Track Approaches for the Retrieval of Earth’s Surface Displacements. Appl. Sci. 2017, 7, 1264. [Google Scholar] [CrossRef] [Green Version]
- Duan, W.; Zhang, H.; Wang, C.; Tang, Y. Multi-Temporal InSAR Parallel Processing for Sentinel-1 Large-Scale Surface Deformation Mapping. Remote Sens. 2020, 12, 3749. [Google Scholar] [CrossRef]
- Parker, A.L. InSAR Observations of Ground Deformation; Springer Theses; Springer International Publishing: Cham, Germany, 2017; ISBN 978-3-319-39033-8. [Google Scholar]
- Zhang, B.; Wang, R.; Deng, Y.; Ma, P.; Lin, H.; Wang, J. Mapping the Yellow River Delta land subsidence with multitemporal SAR interferometry by exploiting both persistent and distributed scatterers. ISPRS J. Photogramm. Remote Sens. 2019, 148, 157–173. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, C.; Zhang, Q.; Peng, M. Sequential InSAR Time Series Deformation Monitoring of Land Subsidence and Rebound in Xi’an, China. Remote Sens. 2019, 11, 2854. [Google Scholar] [CrossRef] [Green Version]
- Ranjgar, B.; Razavi-Termeh, S.V.; Foroughnia, F.; Sadeghi-Niaraki, A.; Perissin, D. Land Subsidence Susceptibility Mapping Using Persistent Scatterer SAR Interferometry Technique and Optimized Hybrid Machine Learning Algorithms. Remote Sens. 2021, 13, 1326. [Google Scholar] [CrossRef]
- Di Martire, D.; Iglesias, R.; Monells, D.; Centolanza, G.; Sica, S.; Ramondini, M.; Pagano, L.; Mallorquí, J.J.; Calcaterra, D. Comparison between Differential SAR interferometry and ground measurements data in the displacement monitoring of the earth-dam of Conza della Campania (Italy). Remote Sens. Environ. 2014, 148, 58–69. [Google Scholar] [CrossRef]
- Yang, Z.; Li, Z.; Zhu, J.; Wang, Y.; Wu, L. Use of SAR/InSAR in Mining Deformation Monitoring, Parameter Inversion, and Forward Predictions: A Review. IEEE Geosci. Remote Sens. Mag. 2020, 8, 71–90. [Google Scholar] [CrossRef]
- Hooper, A.; Zebker, H.; Segall, P.; Kampes, B. A new method for measuring deformation on volcanoes and other natural terrains using InSAR persistent scatterers. Geophys. Res. Lett. 2004, 31, 1–5. [Google Scholar] [CrossRef]
- Crosetto, M.; Monserrat, O.; Cuevas-González, M.; Devanthéry, N.; Crippa, B. Persistent Scatterer Interferometry: A review. ISPRS J. Photogramm. Remote Sens. 2016, 115, 78–89. [Google Scholar] [CrossRef] [Green Version]
- Gens, R.; Van Genderen, J.L. Review Article SAR interferometry—issues, techniques, applications. Int. J. Remote Sens. 1996, 17, 1803–1835. [Google Scholar] [CrossRef]
- Shanker, P.; Casu, F.; Zebker, H.A.; Lanari, R. Comparison of Persistent Scatterers and Small Baseline Time-Series InSAR Results: A Case Study of the San Francisco Bay Area. IEEE Geosci. Remote Sens. Lett. 2011, 8, 592–596. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef] [Green Version]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A New Algorithm for Processing Interferometric Data-Stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Touzi, R.; Lopes, A.; Bruniquel, J.; Vachon, P.W. Coherence estimation for SAR imagery. IEEE Trans. Geosci. Remote Sens. 1999, 37, 135–149. [Google Scholar] [CrossRef] [Green Version]
- Shanker, P.; Zebker, H. Persistent scatterer selection using maximum likelihood estimation. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef]
- Zhao, C.; Li, Z.; Zhang, P.; Tian, B.; Gao, S. Improved maximum likelihood estimation for optimal phase history retrieval of distributed scatterers in InSAR stacks. IEEE Access 2019, 7, 186319–186327. [Google Scholar] [CrossRef]
- Hooper, A.; Segall, P.; Zebker, H. Persistent scatterer interferometric synthetic aperture radar for crustal deformation analysis, with application to Volcán Alcedo, Galápagos. J. Geophys. Res. Solid Earth 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Samsonov, S.; Tiampo, K. Polarization phase difference analysis for selection of persistent scatterers in SAR interferometry. IEEE Geosci. Remote Sens. Lett. 2011, 8, 331–335. [Google Scholar] [CrossRef]
- Navneet, S.; Kim, J.W. A new InSAR persistent scatterer selection technique using top eigenvalue of coherence matrix. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1969–1978. [Google Scholar] [CrossRef]
- Tiwari, A.; Narayan, A.B.; Dikshit, O. Deep learning networks for selection of measurement pixels in multi-temporal SAR interferometric processing. ISPRS J. Photogramm. Remote Sens. 2020, 166, 169–182. [Google Scholar] [CrossRef]
- Samiei-Esfahany, S.; Martins, J.E.; van Leijen, F.; Hanssen, R.F. Phase Estimation for Distributed Scatterers in InSAR Stacks Using Integer Least Squares Estimation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5671–5687. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Zhang, S.; Li, T.; Gao, Y.; Chen, Q.; Zhang, X. An Adaptive Phase Optimization Algorithm for Distributed Scatterer Phase History Retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3914–3926. [Google Scholar] [CrossRef]
- Luzi, G.; Espín-López, P.F.; Pérez, F.M.; Monserrat, O.; Crosetto, M. A low-cost active reflector for interferometric monitoring based on sentinel-1 sar images. Sensors 2021, 21, 2008. [Google Scholar] [CrossRef]
- Marinkovic, P.; Ketelaar, G.; Van Leijen, F.; Hanssen, R. InSAR quality control: Analysis of five years of corner reflector time series. In Proceedings of the Fringe 2007 Workshop (ESA SP-649), Frascati, Italy, 26–30 November 2007. [Google Scholar]
- Costantini, M.; Farina, A.; Zirilli, F. A fast phase unwrapping algorithm for SAR interferometry. IEEE Trans. Geosci. Remote Sens. 1999, 37, 452–460. [Google Scholar] [CrossRef]
- Marano, S.; Palmieri, F.; Franceschetti, G. Discrete Green’s methods and their application to two-dimensional phase unwrapping. J. Opt. Soc. Am. A 2002, 19, 1319–1333. [Google Scholar] [CrossRef]
- Lauknes, T.R.; Zebker, H.A.; Larsen, Y. InSAR deformation time series using an L1-norm small-baseline approach. IEEE Trans. Geosci. Remote Sens. 2011, 49, 536–546. [Google Scholar] [CrossRef] [Green Version]
- Benoit, A.; Pinel-Puysségur, B.; Jolivet, R.; Lasserre, C. CorPhU: An algorithm based on phase closure for the correction of unwrapping errors in SAR interferometry. Geophys. J. Int. 2020, 221, 1959–1970. [Google Scholar] [CrossRef] [Green Version]
- Crosetto, M.; Solari, L.; Balasis-Levinsen, J.; Bateson, L.; Casagli, N.; Frei, M.; Oyen, A.; Moldestad, D.A.; Mróz, M. Deformation monitoring at European scale: The copernicus ground motion service. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 141–146. [Google Scholar] [CrossRef]
- Hanssen, R.F.; Van Leijen, F.J.; Van Zwieten, G.J.; Bremmer, C.; Dortland, S.; Kleuskens, M. Validation of Existing Processing Chains in TerraFirma Stage 2; Product Validation: Validation in the Amsterdam and Alkmaar Area; ESA TerraFirma Report ESRIN Contract No. 19366//05/I-E; Delft University of Technology: Delft, The Netherlands, 2008. [Google Scholar]
- Devanthéry, N.; Crosetto, M.; Monserrat, O.; Cuevas-González, M.; Crippa, B. An Approach to Persistent Scatterer Interferometry. Remote Sens. 2014, 6, 6662–6679. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Pan, B. A New 3-D Minimum Cost Flow Phase Unwrapping Algorithm Based on Closure Phase. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1857–1867. [Google Scholar] [CrossRef]
- Maubant, L.; Pathier, E.; Daout, S.; Radiguet, M.; Doin, M.-P.; Kazachkina, E.; Kostoglodov, V.; Cotte, N.; Walpersdorf, A. Independent Component Analysis and Parametric Approach for Source Separation in InSAR Time Series at Regional Scale: Application to the 2017–2018 Slow Slip Event in Guerrero (Mexico). J. Geophys. Res. Solid Earth 2020, 125. [Google Scholar] [CrossRef]
- Biescas, E.; Crosetto, M.; Agudo, M.; Monserrat, O.; Crippa, B. Two Radar Interferometric Approaches to Monitor Slow and Fast Land Deformation. J. Surv. Eng. 2007, 133, 66–71. [Google Scholar] [CrossRef]
- Ajourlou, P.; Samiei Esfahany, S.; Safari, A. A new strategy for phase unwrapping in InSAR time series over areas with high deformation rate: Case study on the southern Tehran subsidence. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 35–40. [Google Scholar] [CrossRef] [Green Version]
- Pepe, A.; Lanari, R. On the Extension of the Minimum Cost Flow Algorithm for Phase Unwrapping of Multitemporal Differential SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2374–2383. [Google Scholar] [CrossRef]
- Golub, G.H.; Van Loan, C.F. Matrix Computations, 4th ed.; JHU Press: Baltimore, ML, USA, 2013; ISBN 978-1-4214-0794-4. [Google Scholar]
- Afsharnia, H.; Arefi, H.; Sharifi, M.A. Optimal weight design approach for the geometrically-constrained matching of satellite stereo images. Remote Sens. 2017, 9, 965. [Google Scholar] [CrossRef] [Green Version]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wassie, Y.; Mirmazloumi, S.M.; Crosetto, M.; Palamà, R.; Monserrat, O.; Crippa, B. Spatio-Temporal Quality Indicators for Differential Interferometric Synthetic Aperture Radar Data. Remote Sens. 2022, 14, 798. https://doi.org/10.3390/rs14030798
Wassie Y, Mirmazloumi SM, Crosetto M, Palamà R, Monserrat O, Crippa B. Spatio-Temporal Quality Indicators for Differential Interferometric Synthetic Aperture Radar Data. Remote Sensing. 2022; 14(3):798. https://doi.org/10.3390/rs14030798
Chicago/Turabian StyleWassie, Yismaw, S. Mohammad Mirmazloumi, Michele Crosetto, Riccardo Palamà, Oriol Monserrat, and Bruno Crippa. 2022. "Spatio-Temporal Quality Indicators for Differential Interferometric Synthetic Aperture Radar Data" Remote Sensing 14, no. 3: 798. https://doi.org/10.3390/rs14030798
APA StyleWassie, Y., Mirmazloumi, S. M., Crosetto, M., Palamà, R., Monserrat, O., & Crippa, B. (2022). Spatio-Temporal Quality Indicators for Differential Interferometric Synthetic Aperture Radar Data. Remote Sensing, 14(3), 798. https://doi.org/10.3390/rs14030798