
Urban Traffic Monitoring and Analysis Using Unmanned Aerial Vehicles (UAVs): A Systematic Literature Review



Abstract
:1. Introduction
2. Related Work
- In [35], a review optimization approaches for drone operations and drone–truck combined operations in civil applications is provided. Drone operation and applications, some previous works, and issues like mathematical models, solution methods, and synchronization between a drone and a truck are presented in the study, also suggesting some possible research directions.
- The recent advances of UAVs and their roles in current and future transportation systems are presented in [10]. The paper summarizes the emerging technologies of UAV in transportation, highlighting performance measures, network and communications, software architecture, privacy, and security concerns. The challenges and opportunities of integrating UAVs in ITS are discussed and some potential research directions are identified in the paper.
- In [36], a literature review of 111 publications related to the use of civil drones for transportation is provided. The focus is on passenger transportation drones, but applications from the urban and transportation planning fields are also reviewed. Potential problems are identified, and proposed solutions are given for different areas of application.
- Emerging issues in civilian UAV usage and case studies for various fields are presented in [37], a review article that tries to analyze the potential implementations of drones in the economic system and how these implementations can be managed.
- The state of the art of UAV for geomatics applications is reported in [3]. The survey gives an overview of different UAV platforms, also presenting various applications, approaches, and perspectives for UAV image processing.
- Ref. [38] provide an extensive review of optimization approaches for the civil application of UAVs. The study addresses different aspects related to UAV operation, such as area coverage, search operations, routing, data gathering and recharging, communication links, and computing power.
- In [11], the applications of UAVs in three domains of transportation (road safety, traffic monitoring, and highway infrastructure management) are reviewed. The paper discusses topics related to vision algorithms and image processing systems used in accident investigation, traffic flow analysis, and road monitoring.
- An overview of advances in the vision-based condition assessment of civil infrastructure, civil infrastructure inspection, and monitoring applications is presented in [39]. The study reviews relevant findings in computer vision, machine learning, and structural engineering, highlighting some key challenges and concluding with ongoing work.
- Another study [40] presents the research on using UAVs for vehicle detection by means of deep learning techniques. The work is focused on accuracy improvements and computation overhead reduction, showing similarities and differences of various techniques.
- A comprehensive study focused on UAV civil applications and their challenges is presented in [12]. Research trends, key challenges related to charging, collision avoidance, networking and security, and future insights are featured in the paper.
- In [41], a critical review of UAVs remote sensing data processing and their application is performed, focusing on land-cover classification and change detection and discussing potential improvements and algorithmic aspects.

{kind=link}
{kind=link}
{kind=link}
| No. | Ref. | Title | Year | Journal | Application Domain |
|---|---|---|---|---|---|
| 1 | [35] | Optimization for drone and drone-truck combined operations: A review of the state of the art and future directions | 2020 | Computers and Operations Research | civil applications including construction/infrastructure, agriculture, transportation/logistics, security/disaster management, entertainment/media, etc. |
| 2 | [10] | Advances of UAVs toward Future Transportation: The State-of-the-Art, Challenges, and Opportunities | 2021 | Future Transportation | transportation sector: surveillance, urban planning, traffic monitoring, emergency response, road maintenance and safety, warehouse inventory management, UAV delivery, disaster management, search and rescue |
| 3 | [36] | Drones for parcel and passenger transportation: A literature review | 2020 | Transportation Research Interdisciplinary Perspectives | safety and security, environment and sustainability, urban planning and infrastructure |
| 4 | [37] | Managing the drone revolution: A systematic literature review into the current use of airborne drones and future strategic directions for their effective control | 2020 | Journal of Air Transport Management | monitoring, inspection and data collection, photography/image collection, recreation, logistics |
| 5 | [3] | UAV for 3D mapping applications: a review | 2014 | Applied Geomatics | archeological site 3D recoding and modeling, geological and mining studies, urban areas, |
| 6 | [38] | Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey | 2018 | Networks | agriculture, environmental protection and disaster management, rescue, transport, infrastructure and construction, air traffic management, manufacturing, traffic surveillance, telecommunications, entertainment and media |
| 7 | [11] | Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges | 2020 | Transportation Research Part A | road safety, traffic monitoring and highway infrastructure management |
| 8 | [39] | Advances in Computer Vision-Based Civil Infrastructure Inspection and Monitoring | 2019 | Engineering | Inspection, monitoring |
| 9 | [40] | A survey of deep learning techniques for vehicle detection from UAV images | 2021 | Journal of Systems Architecture | traffic management—vehicle detection |
| 10 | [12] | Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges | 2019 | IEEE Access | search and rescue, remote sensing, construction and infrastructure inspection, precision agriculture, delivery of goods, real-time monitoring of road traffic, surveillance, providing wireless coverage |
| 11 | [41] | Unmanned Aerial Vehicle for Remote Sensing Applications—A Review | 2019 | Remote Sensing | precision agriculture and vegetation, urban environment and management, disaster, hazards and rescue |
3. Materials and Methods
3.1. Protocol and Registration
3.2. Eligibility Criteria
3.3. Information Sources
3.4. Search
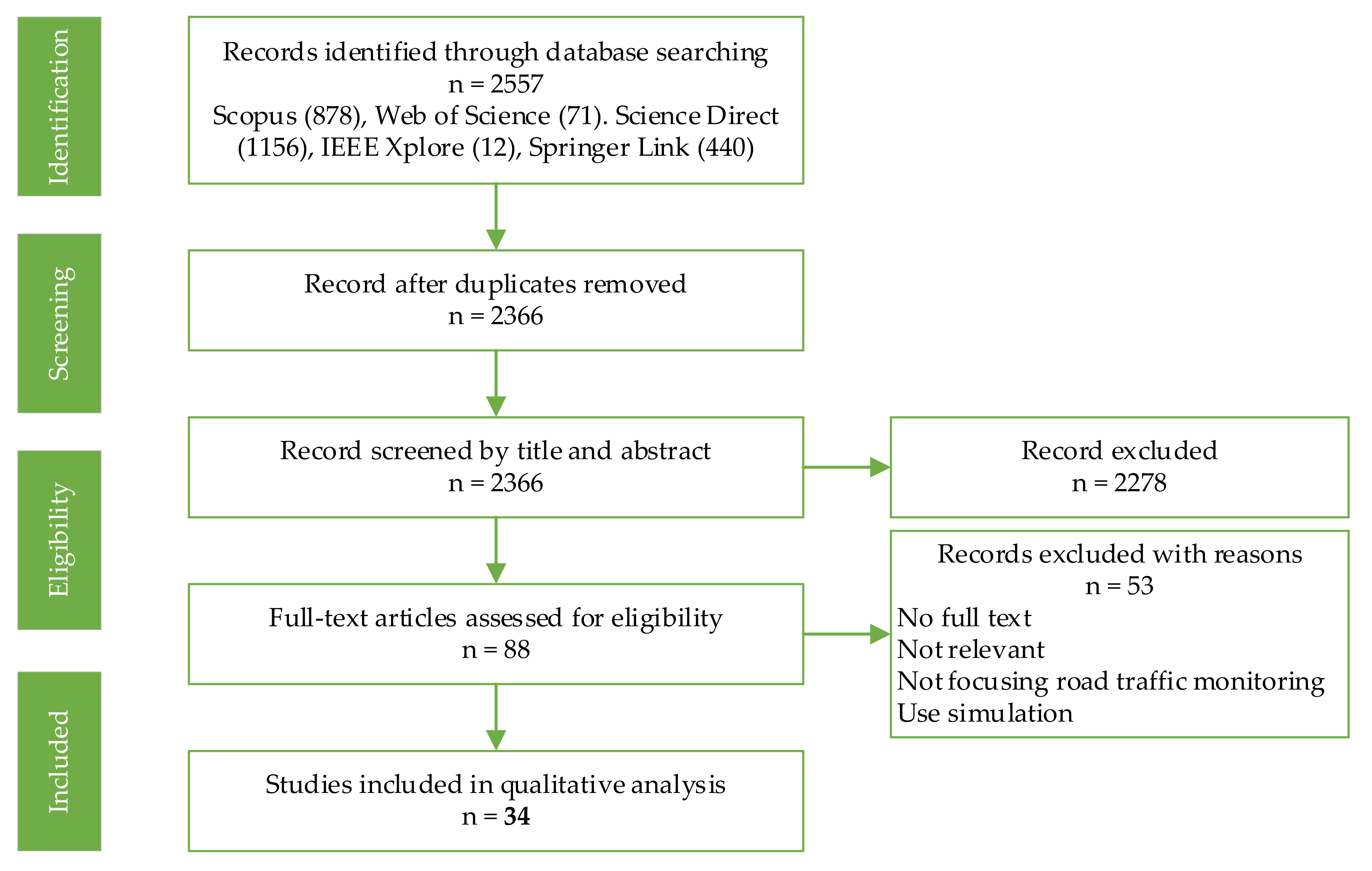
3.5. Study Selection
3.6. Data Extraction
4. Results
4.1. Study Selection
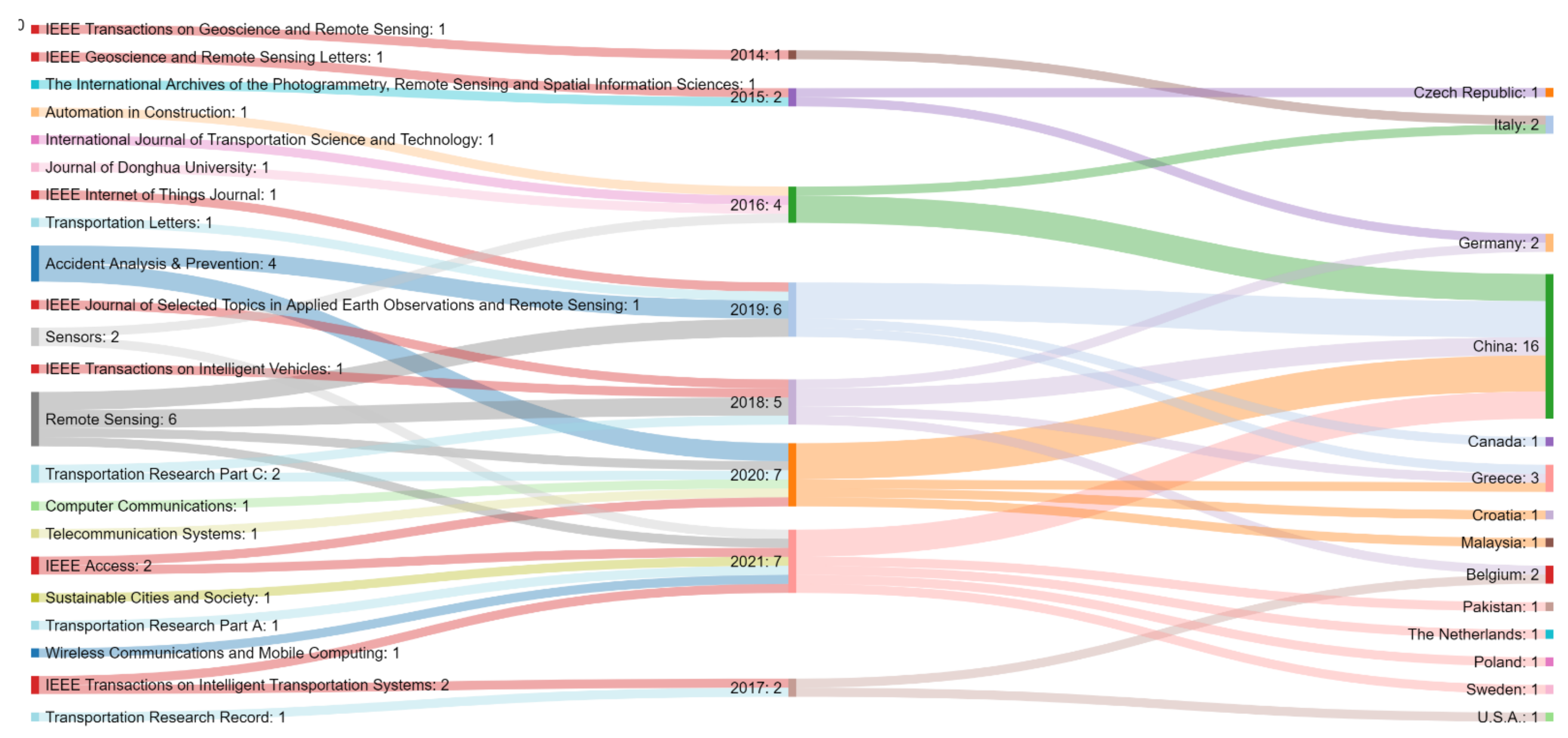
4.2. Study Characteristics
4.3. Synthesis of Results
4.4. Main Purpose of the Study
5. Discussion
6. Conclusions
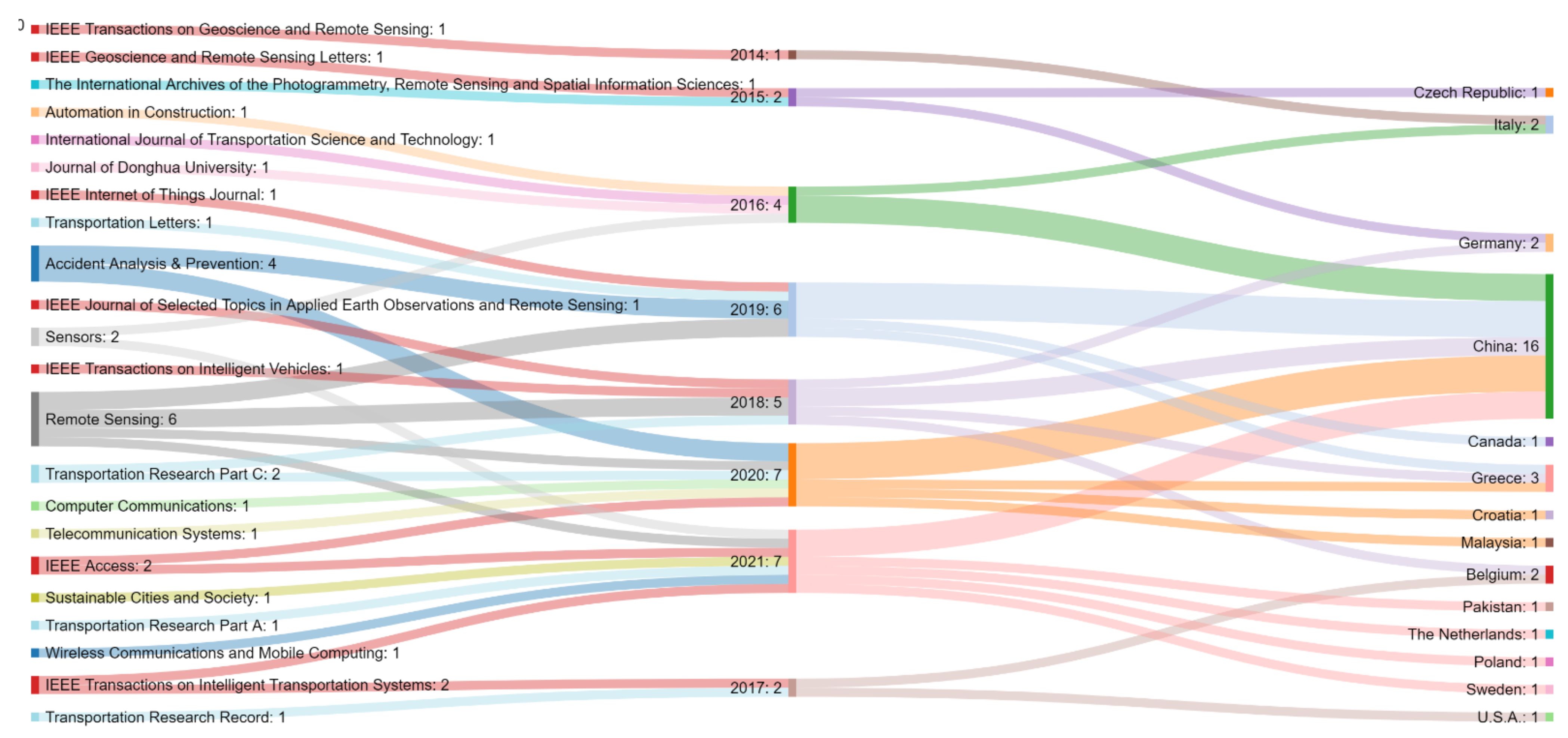
- There is a growing trend in the use of drones to monitor traffic in recent years, with a significant increase in the last three years.
- China has supremacy in terms of the number of applications in this field, as well as the source of data acquisition equipment (i.e., UAV models).
- In terms of the construction of flying mechanisms, rotary-wing UAVs were preferred for data collection, especially quadcopters.
- Various image processing methods were proposed for vehicle detection and tracking, but approaches based on deep learning have been preferred in recent years.
- Most of the identified studies are based on vehicle detection and tracking techniques, but also the extraction of the trajectory of the vehicles and the evaluation or prediction of a collision.
- There is a vast literature on the use of drones in various fields, but there is still much to add to traffic monitoring. This article is part of a series of those aiming to provide help to researchers and practitioners who contribute to this field.
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
Appendix A
| Author | Paper Aim | Findings | Future Work |
|---|---|---|---|
| Ahmed et al., 2021 [60] | The utilization of a UAV-based geospatial analysis technique for accurate extraction of longitudinal and lateral distances between vehicles to determine the relationship between macroscopic and microscopic parameters of traffic flow. |
|
|
| Apeltauer et al., 2015 [61] | A new approach for simultaneous detection and tracking of vehicles moving through an intersection in aerial images acquired by an unmanned aerial vehicle (UAV). |
|
|
| Balamuralidhar et al., 2021 [62] | Presentation of a traffic monitoring system that can detect, track, and estimate the velocity of vehicles in a sequence of aerial images. The solution has been optimized to execute these tasks in real-time on an embedded computer installed on an Unmanned Aerial Vehicle (UAV) |
|
|
| Barmpounakis et al., 2018 [63] | Address PTW (Powered Two-Wheeler) overtaking phenomena using a two-step modelling approach based on optimized and meta-optimized decision trees. |
|
|
| Barmpounakis et al., 2019 [64] | Examination of the potential of using UAVs as part of the ITS infrastructure as a way of extracting naturalistic trajectory data from aerial video footage from a low volume four-way intersection and a pedestrian passage. |
|
|
| Barmpounakis and Geroliminis 2020 [65] | Recording traffic streams in a multi-modal congested environment over an urban setting using UAS that can allow the deep investigation of critical traffic phenomena. |
|
|
| Brkić et al., 2020 [66] | Proposing a new, low-cost framework for the determination of highly accurate traffic flow parameters. |
|
|
| Chen et al., 2019 [67] | Assessing how simulation can be utilized for vehicle-pedestrian conflict assessment at crosswalks. Empirical models have been established to represent the stochastic behaviour of right-turning vehicles and pedestrians under different geometric layouts and operational conditions at signalized intersections. |
|
|
| Chen et al., 2021 [68] | Proposing a novel methodological framework for automatic and accurate vehicle trajectory extraction from aerial videos. |
|
|
| Guido et al., 2016 [69] | Presenting a methodology to extract vehicle trajectories and speeds from Unmanned Aerial Vehicles (UAV) video processing. |
|
|
| Javadi et al., 2021 [70] | Investigating the ability of three-dimensional (3D) feature maps to improve the performance of deep neural network (DNN) for vehicle detection. First, we propose a DNN based on YOLOv3 with various base networks, including DarkNet-53, SqueezeNet, MobileNet-v2, and DenseNet-201. |
|
|
| Kang and Mattyus 2015 [71] | Presenting a method which can detect vehicles with orientation and type information on aerial images in a few seconds on large images. The application of Integral Channel Features in a Soft Cascade structure results in both good detection performance and fast speed |
|
|
| Kaufmann et al., 2018 [72] | Showing a suitable way to perform spatiotemporal measurements of city traffic using aerial observations with an unmanned aerial vehicle. |
|
|
| Ke et al., 2017 [73] | Proposing a novel framework for real-time traffic flow parameter estimation from aerial videos. The proposed system identifies the directions of traffic streams and extracts traffic flow parameters of each traffic stream separately. |
|
|
| Khan et al., 2017 [74] | Processing and analysis of UAV-acquired traffic footage. A detailed methodological framework for automated UAV video processing is proposed to extract the trajectories of multiple vehicles at a particular road segment. |
|
|
| Khan et al., 2018 [75] | Analysis of vehicle trajectories acquired via small rotary-wing UAV footage. The experimental data to analyse traffic flow conditions at a signalized intersection was obtained in the city of Sint-Truiden, Belgium. |
|
|
| Khan et al., 2020 [76] | Proposing a smart traffic surveillance system based on Unmanned Aerial Vehicle (UAV) using 5G technology. |
|
|
| Kujawski and Dudek 2021 [77] | Presenting methods of data acquisition from cameras mounted on unmanned aerial vehicles (UAV) and their further analysis, which may be used to improve urban transportation systems and its sustainability. The analysed data concerning the situation of urban transport in points of intersection of national and local roads. |
|
|
| Li et al., 2019 [78] | Proposing a novel adaptive framework for multi-vehicle ground speed estimation in airborne videos. |
|
|
| Li et al., 2020 [79] | Proposing a robust vehicle detection model for aerial images. First, image pre-processing to deal with IoU distribution imbalance problem and greatly improve the recall rate were performed. Then, SSP-SSD to enhance feature representation of vehicles with different scales and improve the precision was proposed. |
|
|
| Liu and Zhang 2021 [28] | Fusing the target detection network, YOLO v4, with the detection-based multitarget tracking algorithm, DeepSORT, a method based on deep learning for automatic vehicle detection and tracking in urban environments, has been designed. |
| NR |
| Luo et al., 2020 [80] | Proposing a traffic collisions early warning scheme aided by small unmanned aerial vehicle (UAV) companion. Basically, it is a vision-based driver assistance system, and the difference in comparison with the available schemes is that the camera is flying along with the host vehicle. |
|
|
| Moranduzzo and Melgani 2014 [81] | Presenting a solution to solve the car detection and counting problem in images acquired by means of unmanned aerial vehicles (UAVs). |
|
|
| Shan et al., 2021 [82] | Proposing a systematic approach to detect and track vehicles based on the YOLO v3 model and the deep SORT algorithm for further extracting key traffic parameters. |
|
|
| Wan et al., 2019 [83] | Proposing a computer vision-based target tracking algorithm aiming at locating UAV-captured targets, like pedestrian and vehicle, using sparse representation theory. |
|
|
| Wang et al., 2016a [84] | Presenting a crash prediction method based on a bivariate extreme value theory (EVT) framework and UAV trajectory data processing. |
|
|
| Wang et al., 2016b [85] | Proposing an improved start-wave velocity model, where the speed and density of traffic flow are converted into vehicle space headway, meaning vehicle length and other auxiliary parameters which can be recognized from aerial video or other means |
|
|
| Wang et al., 2019 [86] | Proposing a deep-learning framework for vehicle detection and tracking from UAV videos for monitoring traffic flow in complex road structures. The approach is designed to be invariant to significant orientation and scale variations in the videos. The detection procedure is performed by fine-tuning a state-of-the-art object detector, You Only Look Once (YOLOv3), using several custom-labelled traffic datasets. |
|
|
| Wang et al., 2019 [87] | Introducing a new vehicle detecting and tracking system based on image data collected by UAV. The system uses consecutive frames to generate vehicle’s dynamic information, such as positions and velocities. |
|
|
| Xing et al., 2020a [88] | Investigating the traffic conflict risks at the upstream approach of toll plaza during the vehicles’ diverging period from the time of arrival at the diverging area to that of entering the tollbooths. Based on the vehicle’s trajectory data extracted from unmanned aerial vehicle (UAV) videos using an automated video analysis system, vehicles’ collision risk is computed by extended time to collision (TTC). |
|
|
| Xing et al., 2020b [89] | Developing the logistic regression (LR) model and five typical non-parametric models including, K-Nearest Neighbour (KNN), Artificial Neural Networks (ANN), Support Vector Machines (SVM), Decision Trees (DT), and Random Forest (RF) to examine the relationship between influencing factors and vehicle collision risk. |
|
|
| Xu et al., 2016 [90] | Proposing a new hybrid vehicle detection scheme which integrates the Viola-Jones (V-J) and linear SVM classifier with HOG feature (HOG + SVM) methods for vehicle detection from low-altitude unmanned aerial vehicle (UAV) images. |
|
|
| Zhu et al., 2018a [91] | Presenting an all-in-one behaviour recognition framework for moving vehicles based on the latest deep learning techniques. |
|
|
| Zhu et al., 2018b [92] | Presenting an advanced urban traffic density estimation solution using the latest deep learning techniques to intelligently process ultrahigh-resolution traffic videos taken from an unmanned aerial vehicle (UAV). |
|
|
References
- Azar, A.; Koubaa, A.; Mohamed, N.A.; Ibrahim, H.; Ibrahim, Z.; Kazim, M.; Ammar, A.; Benjdira, B.; Khamis, A.; Hameed, I.; et al. Drone Deep Reinforcement Learning: A Review. Electronics 2021, 10, 999. [Google Scholar] [CrossRef]
- Elkhrachy, I. Accuracy Assessment of Low-Cost Unmanned Aerial Vehicle (UAV) Photogrammetry. Alex. Eng. J. 2021, 60, 5579–5590. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- de Silva, I. Geomatics Applied to Civil Engineering State of the Art. In Applications of Geomatics in Civil Engineering; Ghosh, J., de Silva, I., Eds.; Springer: Singapore, 2020; pp. 31–46. [Google Scholar]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The use of unmanned aerial vehicles (UAVs) for engineering geology applications. Bull. Eng. Geol. Environ. 2020, 79, 3437–3481. [Google Scholar] [CrossRef] [Green Version]
- Alioua, A.; Djeghri, H.-e.; Cherif, M.E.T.; Senouci, S.-M.; Sedjelmaci, H. UAVs for traffic monitoring: A sequential game-based computation offloading/sharing approach. Comput. Netw. 2020, 177, 107273. [Google Scholar] [CrossRef]
- Cummings, A.R.; Cummings, G.R.; Hamer, E.; Moses, P.; Norman, Z.; Captain, V.; Bento, R.; Butler, K. Developing a UAV-based monitoring program with indigenous peoples. J. Unmanned Veh. Syst. 2017, 5, 115–125. [Google Scholar] [CrossRef]
- Chamoso, P.; Raveane, W.; Parra, V.; González, A. UAVs Applied to the Counting and Monitoring of Animals. In Ambient Intelligence-Software and Applications; Ramos, C., Novais, P., Nihan, C., Corchado Rodríguez, J., Eds.; Springer: Cham, Switzerland, 2013; pp. 71–80. [Google Scholar]
- Kumar, A.; Sharma, K.; Singh, H.; Naugriya, S.G.; Gill, S.S.; Buyya, R. A drone-based networked system and methods for combating coronavirus disease (COVID-19) pandemic. Futur. Gener. Comput. Syst. 2021, 115, 1–19. [Google Scholar] [CrossRef]
- Gupta, A.; Afrin, T.; Scully, E.; Yodo, N. Advances of UAVs toward Future Transportation: The State-of-the-Art, Challenges, and Opportunities. Futur. Transp. 2021, 1, 19. [Google Scholar] [CrossRef]
- Outay, F.; Mengash, H.A.; Adnan, M. Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges. Transp. Res. Part A Policy Pract. 2020, 141, 116–129. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Elloumi, M.; Dhaou, R.; Escrig, B.; Idoudi, H.; Saidane, L.A. Monitoring road traffic with a UAV-based system. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar]
- Degas, A.; Kaddoum, E.; Gleizes, M.-P.; Adreit, F.; Rantrua, A. Cooperative multi-agent model for collision avoidance applied to air traffic management. Eng. Appl. Artif. Intell. 2021, 102, 104286. [Google Scholar] [CrossRef]
- Villa, T.F.; Jayaratne, E.R.; Gonzalez, L.F.; Morawska, L. Determination of the vertical profile of particle number concentration adjacent to a motorway using an unmanned aerial vehicle. Environ. Pollut. 2017, 230, 134–142. [Google Scholar] [CrossRef] [Green Version]
- Naughton, J.; McDonald, W. Evaluating the Variability of Urban Land Surface Temperatures Using Drone Observations. Remote Sens. 2019, 11, 1722. [Google Scholar] [CrossRef] [Green Version]
- Yalcin, E. Two-dimensional hydrodynamic modelling for urban flood risk assessment using unmanned aerial vehicle imagery: A case study of Kirsehir, Turkey. J. Flood Risk Manag. 2018, 12, e12499. [Google Scholar] [CrossRef]
- De Vivo, F.; Battipede, M.; Johnson, E. Infra-red line camera data-driven edge detector in UAV forest fire monitoring. Aerosp. Sci. Technol. 2021, 111, 106574. [Google Scholar] [CrossRef]
- Biçici, S.; Zeybek, M. An approach for the automated extraction of road surface distress from a UAV-derived point cloud. Autom. Constr. 2021, 122, 103475. [Google Scholar] [CrossRef]
- Agarwal, A.; Kumar, S.; Singh, D. Development of Neural Network Based Adaptive Change Detection Technique for Land Terrain Monitoring with Satellite and Drone Images. Def. Sci. J. 2019, 69, 474–480. [Google Scholar] [CrossRef]
- Sutheerakul, C.; Kronprasert, N.; Kaewmoracharoen, M.; Pichayapan, P. Application of Unmanned Aerial Vehicles to Pedestrian Traffic Monitoring and Management for Shopping Streets. Transp. Res. Procedia 2017, 25, 1717–1734. [Google Scholar] [CrossRef]
- Zhu, J.; Chen, S.; Tu, W.; Sun, K. Tracking and Simulating Pedestrian Movements at Intersections Using Unmanned Aerial Vehicles. Remote Sens. 2019, 11, 925. [Google Scholar] [CrossRef] [Green Version]
- Sahil; Sood, S.K. Fog-Cloud centric IoT-based cyber physical framework for panic oriented disaster evacuation in smart cities. Earth Sci. Inf. 2020, 1–22. [Google Scholar] [CrossRef]
- Ranquist, E.; Steiner, M.; Argrow, B. Exploring the Range of Weather Impacts on UAS Operations. In Proceedings of the 18th Conference on Aviation, Range and Aerospace Meteorology, Seattle, WA, USA, 22–26 January 2017. [Google Scholar]
- Vanegas Alvarez, F.; Gonzalez, L. Enabling UAV Navigation with Sensor and Environmental Uncertainty in Cluttered and GPS-Denied Environments. Sensors 2016, 16, 666. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pascua, D.A.; Abellanosa, C.; Lugpatan, R. Position Estimation using Inertial Measurement Unit (IMU) on a Quadcopter in an Enclosed Environment. Int. J. Comput. Commun. Instrum. Eng. 2016, 2, 332. [Google Scholar] [CrossRef]
- Saboor, A.; Coene, S.; Vinogradov, E.; Tanghe, E.; Joseph, W.; Pollin, S. Elevating the future of mobility: UAV-enabled Intelligent Transportation Systems. arXiv 2021, arXiv:2110.09934. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Z. A Vision-Based Target Detection, Tracking, and Positioning Algorithm for Unmanned Aerial Vehicle. Wirel. Commun. Mob. Comput. 2021, 2021, 5565589. [Google Scholar] [CrossRef]
- Utomo, W.; Bhaskara, P.W.; Kurniawan, A.; Juniastuti, S.; Yuniarno, E.M. Traffic Congestion Detection Using Fixed-Wing Unmanned Aerial Vehicle (UAV) Video Streaming Based on Deep Learning. In Proceedings of the 2020 International Conference on Computer Engineering, Network and Intelligent Multimedia (CENIM 2020), Surabaya, Indonesia, 13–18 November 2020. [Google Scholar]
- Zhang, H.; Liptrott, M.; Bessis, N.; Cheng, J. Real-Time Traffic Analysis using Deep Learning Techniques and UAV based Video. In Proceedings of the 2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Taipei, Taiwan, 18–21 September 2019; pp. 1–5. [Google Scholar]
- Kumar, A.; Krishnamurthi, R.; Nayyar, A.; Luhach, A.K.; Khan, M.S.; Singh, A. A novel Software-Defined Drone Network (SDDN)-based collision avoidance strategies for on-road traffic monitoring and management. Veh. Commun. 2021, 28, 100313. [Google Scholar] [CrossRef]
- Chen, P.; Zeng, W.; Yu, G.; Wang, Y. Surrogate Safety Analysis of Pedestrian-Vehicle Conflict at Intersections Using Unmanned Aerial Vehicle Videos. J. Adv. Transp. 2017, 2017, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Ruichek, Y.; Yasar, A.-U.-H.; Janssens, D.; Wets, G. Unmanned Aerial Vehicle-based Traffic Analysis: A Case Study to Analyze Traffic Streams at Urban Roundabouts. Procedia Comput. Sci. 2018, 130, 636–643. [Google Scholar] [CrossRef]
- Hadiwardoyo, S.A.; Hernández-Orallo, E.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Experimental characterization of UAV-to-car communications. Comput. Netw. 2018, 136, 105–118. [Google Scholar] [CrossRef]
- Chung, S.H.; Sah, B.; Lee, J. Optimization for drone and drone-truck combined operations: A review of the state of the art and future directions. Comput. Oper. Res. 2020, 123, 105004. [Google Scholar] [CrossRef]
- Kellermann, R.; Biehle, T.; Fischer, L. Drones for parcel and passenger transportation: A literature review. Transp. Res. Interdiscip. Perspect. 2020, 4, 100088. [Google Scholar] [CrossRef]
- Merkert, R.; Bushell, J. Managing the drone revolution: A systematic literature review into the current use of airborne drones and future strategic directions for their effective control. J. Air Transp. Manag. 2020, 89, 101929. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 1–48. [Google Scholar] [CrossRef]
- Spencer, B.F.; Hoskere, V.; Narazaki, Y. Advances in Computer Vision-Based Civil Infrastructure Inspection and Monitoring. Engineering 2019, 5, 199–222. [Google Scholar] [CrossRef]
- Srivastava, S.; Narayan, S.; Mittal, S. A survey of deep learning techniques for vehicle detection from UAV images. J. Syst. Arch. 2021, 117, 102152. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef] [Green Version]
- Kanistras, K.; Martins, G.; Rutherford, M.J.; Valavanis, K.P. A Survey of Unmanned Aerial Vehicles (UAVs) for Traffic Monitoring. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 221–234. [Google Scholar]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A review of UAV monitoring in mining areas: Current status and future perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef] [Green Version]
- Videras Rodríguez, M.; Melgar, S.G.; Cordero, A.S.; Márquez, J.M.A. A Critical Review of Unmanned Aerial Vehicles (UAVs) Use in Architecture and Urbanism: Scientometric and Bibliometric Analysis. Appl. Sci. 2021, 11, 9966. [Google Scholar] [CrossRef]
- Śledź, S.; Ewertowski, M.W.; Piekarczyk, J. Applications of unmanned aerial vehicle (UAV) surveys and Structure from Motion photogrammetry in glacial and periglacial geomorphology. Geomorphology 2021, 378, 107620. [Google Scholar] [CrossRef]
- Eskandari, R.; Mahdianpari, M.; Mohammadimanesh, F.; Salehi, B.; Brisco, B.; Homayouni, S. Meta-analysis of Unmanned Aerial Vehicle (UAV) Imagery for Agro-environmental Monitoring Using Machine Learning and Statistical Models. Remote Sens. 2020, 12, 3511. [Google Scholar] [CrossRef]
- Mohan, M.; Richardson, G.; Gopan, G.; Aghai, M.M.; Bajaj, S.; Galgamuwa, G.A.P.; Vastaranta, M.; Arachchige, P.S.P.; Amorós, L.; Corte, A.P.; et al. UAV-Supported Forest Regeneration: Current Trends, Challenges and Implications. Remote Sens. 2021, 13, 2596. [Google Scholar] [CrossRef]
- Sibanda, M.; Mutanga, O.; Chimonyo, V.G.P.; Clulow, A.D.; Shoko, C.; Mazvimavi, D.; Dube, T.; Mabhaudhi, T. Application of Drone Technologies in Surface Water Resources Monitoring and Assessment: A Systematic Review of Progress, Challenges, and Opportunities in the Global South. Drone 2021, 5, 84. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Al-Kaff, A.; Martín, D.; García, F.; Escalera, A.D.L.; María Armingol, J. Survey of computer vision algorithms and applications for unmanned aerial vehicles. Expert Syst. Appl. 2018, 92, 447–463. [Google Scholar] [CrossRef]
- Alladi, T.; Chamola, V.; Sahu, N.; Guizani, M. Applications of blockchain in unmanned aerial vehicles: A review. Veh. Commun. 2020, 23, 100249. [Google Scholar] [CrossRef]
- Chen, X.; Tang, J.; Lao, S. Review of Unmanned Aerial Vehicle Swarm Communication Architectures and Routing Protocols. Appl. Sci. 2020, 10, 3661. [Google Scholar] [CrossRef]
- Darvishpoor, S.; Roshanian, J.; Raissi, A.; Hassanalian, M. Configurations, flight mechanisms, and applications of unmanned aerial systems: A review. Prog. Aerosp. Sci. 2020, 121, 100694. [Google Scholar] [CrossRef]
- Emilien, A.-V.; Thomas, C.; Thomas, H. UAV & satellite synergies for optical remote sensing applications: A literature review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Agrawal, D.P.; Zhang, S. Communication and networking of UAV-based systems: Classification and associated architectures. J. Netw. Comput. Appl. 2017, 84, 93–108. [Google Scholar] [CrossRef]
- Xu, C.; Liao, X.; Tan, J.; Ye, H.; Lu, H. Recent Research Progress of Unmanned Aerial Vehicle Regulation Policies and Technologies in Urban Low Altitude. IEEE Access 2020, 8, 74175–74194. [Google Scholar] [CrossRef]
- Yazid, Y.; Ez-Zazi, I.; Guerrero-González, A.; El Oualkadi, A.; Arioua, M. UAV-Enabled Mobile Edge-Computing for IoT Based on AI: A Comprehensive Review. Drones 2021, 5, 148. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Abdollahi, A.; Pradhan, B.; Shukla, N.; Chakraborty, S.; Alamri, A. Deep Learning Approaches Applied to Remote Sensing Datasets for Road Extraction: A State-Of-The-Art Review. Remote Sens. 2020, 12, 1444. [Google Scholar] [CrossRef]
- Ahmed, A.; Ngoduy, D.; Adnan, M.; Baig, M.A.U. On the fundamental diagram and driving behavior modeling of heterogeneous traffic flow using UAV-based data. Transp. Res. Part A Policy Pr. 2021, 148, 100–115. [Google Scholar] [CrossRef]
- Apeltauer, J.; Babinec, A.; Herman, D.; Apeltauer, T. Automatic vehicle trajectory extraction for traffic analysis from aerial video data. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2015, 40, 9–15. [Google Scholar] [CrossRef] [Green Version]
- Balamuralidhar, N.; Tilon, S.; Nex, F. MultEYE: Monitoring System for Real-Time Vehicle Detection, Tracking and Speed Estimation from UAV Imagery on Edge-Computing Platforms. Remote Sens. 2021, 13, 573. [Google Scholar] [CrossRef]
- Barmpounakis, E.N.; Vlahogianni, E.I.; Golias, J.C. Identifying Predictable Patterns in the Unconventional Overtaking Decisions of PTW for Cooperative ITS. IEEE Trans. Intell. Veh. 2018, 3, 102–111. [Google Scholar] [CrossRef]
- Barmpounakis, E.N.; Vlahogianni, E.I.; Golias, J.C.; Babinec, A. How accurate are small drones for measuring microscopic traffic parameters? Transp. Lett. 2019, 11, 332–340. [Google Scholar] [CrossRef]
- Barmpounakis, E.; Geroliminis, N. On the new era of urban traffic monitoring with massive drone data: The pNEUMA large-scale field experiment. Transp. Res. Part C Emerg. Technol. 2020, 111, 50–71. [Google Scholar] [CrossRef]
- Brkić, I.; Miler, M.; Ševrović, M.; Medak, D. An Analytical Framework for Accurate Traffic Flow Parameter Calculation from UAV Aerial Videos. Remote Sens. 2020, 12, 3844. [Google Scholar] [CrossRef]
- Chen, P.; Zeng, W.; Yu, G. Assessing right-turning vehicle-pedestrian conflicts at intersections using an integrated microscopic simulation model. Accid. Anal. Prev. 2019, 129, 211–224. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.Q.; Li, Z.B.; Yang, Y.S.; Qi, L.; Ke, R.M. High-Resolution Vehicle Trajectory Extraction and Denoising from Aerial Videos. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3190–3202. [Google Scholar] [CrossRef]
- Guido, G.; Gallelli, V.; Rogano, D.; Vitale, A. Evaluating the accuracy of vehicle tracking data obtained from Unmanned Aerial Vehicles. Int. J. Transp. Sci. Technol. 2016, 5, 136–151. [Google Scholar] [CrossRef]
- Javadi, S.; Dahl, M.; Pettersson, M.I. Vehicle Detection in Aerial Images Based on 3D Depth Maps and Deep Neural Networks. IEEE Access 2021, 9, 8381–8391. [Google Scholar] [CrossRef]
- Kang, L.; Mattyus, G. Fast Multiclass Vehicle Detection on Aerial Images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1938–1942. [Google Scholar] [CrossRef] [Green Version]
- Kaufmann, S.; Kerner, B.S.; Rehborn, H.; Koller, M.; Klenov, S.L. Aerial observations of moving synchronized flow patterns in over-saturated city traffic. Transp. Res. Part C Emerg. Technol. 2018, 86, 393–406. [Google Scholar] [CrossRef]
- Ke, R.; Li, Z.; Kim, S.; Ash, J.; Cui, Z.; Wang, Y. Real-Time Bidirectional Traffic Flow Parameter Estimation from Aerial Videos. IEEE Trans. Intell. Transp. Syst. 2017, 18, 890–901. [Google Scholar] [CrossRef]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Janssens, D.; Wets, G. Unmanned aerial vehicle-based traffic analysis: Methodological framework for automated multivehicle trajectory extraction. Transp. Res. Rec. 2017, 2626, 25–33. [Google Scholar] [CrossRef]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Janssens, D.; Wets, G. Unmanned aerial vehicle-based traffic analysis: A case study for shockwave identification and flow parameters estimation at signalized intersections. Remote Sens. 2018, 10, 458. [Google Scholar] [CrossRef] [Green Version]
- Khan, N.A.; Jhanjhi, N.Z.; Brohi, S.N.; Usmani, R.S.A.; Nayyar, A. Smart traffic monitoring system using Unmanned Aerial Vehicles (UAVs). Comput. Commun. 2020, 157, 434–443. [Google Scholar] [CrossRef]
- Kujawski, A.; Dudek, T. Analysis and visualization of data obtained from camera mounted on unmanned aerial vehicle used in areas of urban transport. Sustain. Cities Soc. 2021, 72, 103004. [Google Scholar] [CrossRef]
- Li, J.; Chen, S.; Zhang, F.; Li, E.; Yang, T.; Lu, Z. An Adaptive Framework for Multi-Vehicle Ground Speed Estimation in Airborne Videos. Remote Sens. 2019, 11, 1241. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Li, X.; Pan, H. Multi-Scale Vehicle Detection in High-Resolution Aerial Images with Context Information. IEEE Access 2020, 8, 208643–208657. [Google Scholar] [CrossRef]
- Luo, H.; Chu, S.C.; Wu, X.; Wang, Z.; Xu, F. Traffic collisions early warning aided by small unmanned aerial vehicle companion. Telecommun. Syst. 2020, 75, 169–180. [Google Scholar] [CrossRef]
- Moranduzzo, T.; Melgani, F. Automatic Car Counting Method for Unmanned Aerial Vehicle Images. IEEE Trans. Geosci. Remote. Sens. 2014, 52, 1635–1647. [Google Scholar] [CrossRef]
- Shan, D.; Lei, T.; Yin, X.; Luo, Q.; Gong, L. Extracting Key Traffic Parameters from UAV Video with On-Board Vehicle Data Validation. Sensors 2021, 21, 5620. [Google Scholar] [CrossRef] [PubMed]
- Wan, M.; Gu, G.; Qian, W.; Ren, K.; Maldague, X.; Chen, Q. Unmanned Aerial Vehicle Video-Based Target Tracking Algorithm Using Sparse Representation. IEEE Internet Things J. 2019, 6, 9689–9706. [Google Scholar] [CrossRef]
- Wang, L.; Chen, F.; Yin, H. Detecting and tracking vehicles in traffic by unmanned aerial vehicles. Autom. Constr. 2016, 72, 294–308. [Google Scholar] [CrossRef]
- Wang, H.W.; Cheng, K.; Lu, Q.C.; Peng, Z.R. Improved model of start-wave velocity at intersections based on unmanned aerial vehicle data. J. Donghua Univ. Eng. Ed. 2016, 33, 13–19. [Google Scholar]
- Wang, C.; Xu, C.; Dai, Y. A crash prediction method based on bivariate extreme value theory and video-based vehicle trajectory data. Accid. Anal. Prev. 2019, 123, 365–373. [Google Scholar] [CrossRef]
- Wang, J.; Simeonova, S.; Shahbazi, M. Orientation- and Scale-Invariant Multi-Vehicle Detection and Tracking from Unmanned Aerial Videos. Remote Sens. 2019, 11, 2155. [Google Scholar] [CrossRef] [Green Version]
- Xing, L.; He, J.; Li, Y.; Wu, Y.; Yuan, J.; Gu, X. Comparison of different models for evaluating vehicle collision risks at upstream diverging area of toll plaza. Accid. Anal. Prev. 2020, 135, 105343. [Google Scholar] [CrossRef]
- Xing, L.; He, J.; Abdel-Aty, M.; Wu, Y.; Yuan, J. Time-varying Analysis of Traffic Conflicts at the Upstream Approach of Toll Plaza. Accid. Anal. Prev. 2020, 141, 105539. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Yu, G.; Wang, Y.; Wu, X.; Ma, Y. A hybrid vehicle detection method based on viola-jones and HOG + SVM from UAV images. Sensors 2016, 16, 1325. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, J.; Sun, K.; Jia, S.; Lin, W.; Hou, X.; Liu, B.; Qiu, G. Bidirectional long short-term memory network for vehicle behavior recognition. Remote Sens. 2018, 10, 887. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.S.; Sun, K.; Jia, S.; Li, Q.Q.; Hou, X.X.; Lin, W.D.; Liu, B.Z.; Qiu, G.P. Urban Traffic Density Estimation Based on Ultrahigh-Resolution UAV Video and Deep Neural Network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4968–4981. [Google Scholar] [CrossRef]
- SankeyMATIC. Available online: https://sankeymatic.com/ (accessed on 22 December 2021).
- Kovalev, I.; Voroshilova, A.; Karaseva, M. Analysis of the current situation and development trend of the international cargo UAVs market. J. Phys. Conf. Ser. 2019, 1399, 055095. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.L.; Smith, L.N.; Hansen, M.F. The quiet revolution in machine vision-a state-of-the-art survey paper, including historical review, perspectives, and future directions. Comput. Ind. 2021, 130, 103472. [Google Scholar] [CrossRef]
- Alam, S.; Oluoch, J. A survey of safe landing zone detection techniques for autonomous unmanned aerial vehicles (UAVs). Expert Syst. Appl. 2021, 179, 115091. [Google Scholar] [CrossRef]
- Salvo, G.; Caruso, L.; Scordo, A.; Guido, G.; Vitale, A. Traffic data acquirement by unmanned aerial vehicle. Eur. J. Remote Sens. 2017, 50, 343–351. [Google Scholar] [CrossRef]
- Milić, A.; Randjelovic, A.; Radovanović, M. Use of Drones in Operations in the Urban Environment. In Proceedings of the 5th International Scientific Conference Safety and Crisis Management-Theory and Practise Safety for the Future–SecMan 2019, Belgrad, Serbia, 3–4 October 2019. [Google Scholar]
- Watkins, S.; Burry, J.; Mohamed, A.; Marino, M.; Prudden, S.; Fisher, A.; Kloet, N.; Jakobi, T.; Clothier, R. Ten questions concerning the use of drones in urban environments. Build. Environ. 2020, 167, 106458. [Google Scholar] [CrossRef]
- Schmidt, T.; Hauer, F.; Pretschner, A. Understanding Safety for Unmanned Aerial Vehicles in Urban Environments. In Proceedings of the 2021 IEEE Intelligent Vehicles Symposium (IV), Nagoya, Japan, 11–17 July 2021; pp. 638–643. [Google Scholar]
- Shvetsova, S.; Shvetsov, A. Safety when Flying Unmanned Aerial Vehicles at Transport Infrastructure Facilities. Transp. Res. Procedia 2021, 54, 397–403. [Google Scholar] [CrossRef]
- Primatesta, S.; Rizzo, A.; la Cour-Harbo, A. Ground Risk Map for Unmanned Aircraft in Urban Environments. J. Intell. Robot. Syst. 2020, 97, 489–509. [Google Scholar] [CrossRef]
- Lee, J.Y.; Chung, A.Y.; Shim, H.; Joe, C.; Park, S.; Kim, H. UAV Flight and Landing Guidance System for Emergency Situations. Sensors 2019, 19, 4468. [Google Scholar] [CrossRef] [Green Version]
- Guerin, J.; Delmas, K.; Guiochet, J. Certifying Emergency Landing for Safe Urban UAV. In Proceedings of the 2021 51st Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshops (DSN-W), Taipei, Taiwan, 21–24 June 2021. [Google Scholar]
- Elloumi, M.; Dhaou, R.; Escrig, B.; Idoudi, H.; Saidane, L.; Fer, A. Traffic Monitoring on City Roads using UAVs. In Proceedings of the International Conference on Ad-Hoc Networks and Wireless, Luxembourg, 1–3 October 2019. [Google Scholar]
- Sharma, V.; Chen, H.-C.; Kumar, R. Driver behaviour detection and vehicle rating using multi-UAV coordinated vehicular networks. J. Comput. Syst. Sci. 2017, 86, 3–32. [Google Scholar] [CrossRef]
- Zhai, W.; Han, B.; Li, D.; Duan, J.; Cheng, C. A low-altitude public air route network for UAV management constructed by global subdivision grids. PLoS ONE 2021, 16, e0249680. [Google Scholar] [CrossRef]
- Feng, D.; Du, P.; Shen, H.; Liu, Z. UAS Traffic Management in Low-Altitude Airspace Based on Three Dimensional Digital Aerial Corridor System. In Urban Intelligence and Applications. Studies in Distributed Intelligence; Yuan, X., Elhoseny, M., Eds.; Springer: Cham, Switzerland, 2020; pp. 179–188. [Google Scholar]
- Kim, J.; Atkins, E. Airspace Geofencing and Flight Planning for Low-Altitude, Urban, Small Unmanned Aircraft Systems. Appl. Sci. Switz. 2022, 12, 576. [Google Scholar] [CrossRef]
- Samir Labib, N.; Danoy, G.; Musial, J.; Brust, M.R.; Bouvry, P. Internet of Unmanned Aerial Vehicles—A Multilayer Low-Altitude Airspace Model for Distributed UAV Traffic Management. Sensors 2019, 19, 4779. [Google Scholar] [CrossRef] [Green Version]
- Messina, G.; Peña, J.M.; Vizzari, M.; Modica, G. A Comparison of UAV and Satellites Multispectral Imagery in Monitoring Onion Crop. An Application in the ‘Cipolla Rossa di Tropea’ (Italy). Remote Sens. 2020, 12, 3424. [Google Scholar] [CrossRef]
- Xiang, T.; Xia, G.; Zhang, L. Mini-Unmanned Aerial Vehicle-Based Remote Sensing: Techniques, applications, and prospects. IEEE Geosci. Remote Sens. Mag. 2019, 7, 29–63. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Yu, T.; Gu, X.; Sun, Z.; Yang, J.; Zhang, Z.; Mi, X.; Cao, W.; Li, J. The Impact of Spatial Resolution on the Classification of Vegetation Types in Highly Fragmented Planting Areas Based on Unmanned Aerial Vehicle Hyperspectral Images. Remote Sens. 2020, 12, 146. [Google Scholar] [CrossRef] [Green Version]
- Samiappan, S.; Hathcock, L.; Turnage, G.; McCraine, C.; Pitchford, J.; Moorhead, R. Remote Sensing of Wildfire Using a Small Unmanned Aerial System: Post-Fire Mapping, Vegetation Recovery and Damage Analysis in Grand Bay, Mississippi/Alabama, USA. Drones 2019, 3, 43. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Jin, J.; Lan, Z.; Li, C.; Fan, M.; Wang, Y.; Yu, X.; Zhang, Y. ICENET: A Semantic Segmentation Deep Network for River Ice by Fusing Positional and Channel-Wise Attentive Features. Remote Sens. 2020, 12, 221. [Google Scholar] [CrossRef] [Green Version]
- FAA. Small Unmanned Aircraft Systems (UAS) Regulations (Part 107). Available online: https://www.faa.gov/newsroom/small-unmanned-aircraft-systems-uas-regulations-part-107 (accessed on 15 December 2021).
- EASA. 2021. Available online: https://www.easa.europa.eu/document-library/easy-access-rules/online-publications/easy-access-rules-unmanned-aircraft-systems?page=5 (accessed on 23 December 2021).
- Lewandowski, K. Sustainable Usage of Freight Drones in City Centers, Proposition of Regulations for Safe Usage of Drones. Sustainability 2021, 13, 8634. [Google Scholar] [CrossRef]
- Drone-Laws. Drone Laws in Romania. Available online: https://drone-laws.com/drone-laws-in-romania/ (accessed on 23 December 2021).
- Alamouri, A.; Lampert, A.; Gerke, M. An Exploratory Investigation of UAS Regulations in Europe and the Impact on Effective Use and Economic Potential. Drones 2021, 5, 63. [Google Scholar] [CrossRef]
- U-space. Supporting Safe and Secure Drone Operations in Europe; Publications Office of the European Union; European Union: Luxembourg, 2020. [Google Scholar]
- Li, T.; Ye, J.; Dai, J.; Lei, H.; Yang, W.; Pan, G.; Chen, Y. Secure UAV-to-Vehicle Communications. IEEE Trans. Commun. 2021, 69, 5381–5393. [Google Scholar] [CrossRef]
- Allouch, A.; Cheikhrouhou, O.; Koubâa, A.; Toumi, K.; Khalgui, M.; Nguyen Gia, T. UTM-Chain: Blockchain-Based Secure Unmanned Traffic Management for Internet of Drones. Sensors 2021, 21, 3049. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Symagulov, A.; Kuchin, Y.; Zaitseva, E.; Bekbotayeva, A.; Yakunin, K.; Assanov, I.; Levashenko, V.; Popova, Y.; Akzhalova, A.; et al. Review of Some Applications of Unmanned Aerial Vehicles Technology in the Resource-Rich Country. Appl. Sci. 2021, 11, 171. [Google Scholar] [CrossRef]
- Oliveira, F.; Luís, M.; Sargento, S. Machine Learning for the Dynamic Positioning of UAVs for Extended Connectivity. Sensors 2021, 21, 4618. [Google Scholar] [CrossRef] [PubMed]

| Author | UAV Type | Camera Resolution, fps | Flying Height | Video Dataset Duration | Software Techniques | Vehicle Type | Urban Area | Measures |
|---|---|---|---|---|---|---|---|---|
| Ahmed et al., 2021 [60] | DJI Phantom 3 | 4k, NR | NR | 15 min | manual extraction, speed-density model—least-squares method (LSM) | cars, motorbikes, rickshaws, loading pickups, buses, trucks | University Road in Karachi—100-ft long, four marked lanes | traffic flow, traffic density, average speed, longitudinal and lateral gap |
| Apeltauer et al., 2015 [61] | NR | 1920 × 980, 29 fps | 100 m | NR | Viola and Jones’s AdaBoost algorithm, sequential particle filter | vehicles | The site of roundabout junction of Hamerska road and Lipenska road near Olomouc, Czech Republic | relative number of missed targets, relative number of false tracks, average number of swaps in tracks, temporal average of measure of completeness, spatial precision |
| Balamuralidhar et al., 2021 [62] | DJI Phantom 3 | 3269 × 720, 30 fps | 50 m | NR | CPSDarkNet53 backbone, EnEt- segmentation head, YOLO v4, Minimum Output Sum of Squared Error (MOSSE) algorithm, Ground Sampling Distance (GSD); YOLO v4, Tiny YOLO v4, YOLO v3, SSD, Faster RCNN comparation | vehicles | NR | performance of vehicle detectionand vehicle tracking algorithms, speed estimation, inference on Jetson Xavier NX |
| Barmpounakis et al., 2018 [63] | hexacopter | 4K, 30 fps | NR | NR | manual or semi-automatic extraction, frame-by-frame analysis, machine learning—meta-optimized Decision Trees | motorcycles, scooters, cars and heavy vehicles | National Technical University of Athens campus—arterial with three lanes per direction | the type of each vehicle, the lane each vehicle is moving, speeds of all vehicles present, accelerations of all vehicles present, spatial distances between vehicles, duration between each state and general information for the PTW driver |
| Barmpounakis et al., 2019 [64] | hexacopter | 4K, 30 fps | 70 m | 15 min | positive and negative vehicle ‘detectors’ on image content, matching the peaks of probability | 140 vehicles, 23 pedestrians | intersection in the National Technical University of Athens campus—four-legged intersection | trajectory, speed |
| Barmpounakis and Geroliminis 2020 [65] | DJI Phantom 4 Advanced | 4K, 25 fps | NR | 59 h | virtual loop detectors (gates) used to calculate several traffic variables and extract valuable information | cars, taxis, motorcycles, buses, heavy vehicles | a congested area of a 1.3 km2 area with more than 100 km-lanes of road network, around 100 busy intersections | arterial travel time, congestion propagation, lane changing |
| Brkić et al., 2020 [66] | NR | 4096 × 2160, 24 fps | 50 m | 13:52 min | deep learning object detection—Faster R-CNN with ResNet50 backbone network | vehicles | 500 m long section of Zagreb bypass motorway | traffic flow rate, speed estimation, traffic flow density, distance headways and gaps, time headways and gaps |
| Chen et al., 2019 [67] | NR | 1920 × 1080, NR | 100 m | NR | Viola-Jones (V-J) and linear SVM classifier with HOG feature (HOG + SVM), KLT (Kanade-Lucas-Tomasi) feature tracker, image processing system, surrogate safety measures (SSMs) | pedestrians and right-turning vehicles | two urban intersections in Beijing, China | vehicle turning path, turning speed, gap acceptance model and pedestrian behavior model, post encroachment time (PET) |
| Chen et al., 2021 [68] | DJI Mavic professional | 3840 × 2160, 25 fps | 223, 281 m | 22, 43 s | Canny-based ensemble detector, kernelized correlation filter (KCF), wavelet transform | vehicles | two urban expressway sections in Nanjing, China | Root-mean-square deviation (RMSE), the Mean Squared Deviation (MSD), and the Pearson product-moment correlation coefficient (Pearson’s r) |
| Guido et al., 2016 [69] | UAV drone with eight propellers | 4k, 23 fps | 60 m | 19, 21 min, 11, 5 min | identifying pixels associated with the objects of interest, Haar classifier, video stabilization, the conversion to grayscale space and the Gaussian-blurring filter, extract vehicle trajectories—Haar Classifier, ROI | vehicles | a great urban roundabout at the intersection of the ‘‘Asse Viario” with De Gasperi road | Normalized Root Mean Square Error in positioning, speed profile, Root Mean Square Percentage Error in speed evaluation |
| Javadi et al., 2021 [70] | NR | 3840 × 2160, NR | NR | NR | YOLO v3 + DarkNet-53, SqueezeNet, MobileNet-v2 and DenseNet-201 + 3D depth maps, Levenberg-Marquardt algorithm, fcNN | trucks, semi-trailers, and trailers | two industrial harbors | average precision, performance evaluation |
| Kang and Mattyus 2015 [71] | NR | 5616 × 3744, NR | NR | NR | Integral Channel Features (ICF), HOG features, AdaBoost classifier in Soft Cascade structure | cars and trucks | area of Munich, Germany | orientation estimation, type classification, baseline comparison, computation time |
| Kaufmann et al., 2018 [72] | DJI Inspire 1—a small-scale quadcopter | 4K, 25 fps | 100 m | 14.5 min | Levenberg-Marquardt optimization, moving linear regression (MLR), vehicle trajectories—supervised tracking method | vehicles | the street “Völklinger Straβe” in Düsseldor—600m street— starting with two lanes, broadens to three lanes at location 500m and to four lanes at location 530 m | speed, location, trajectories, lane changes per minute |
| Ke et al., 2017 [73] | NR | 960 × 540, 24 fps | NR | 1.17 min | vehicle tracking (Shi-Tomasi features, Kanade-Lucas optical flow algorithm), motion-vector clustering (k-means algorithm), connected-based graph method to detect cluster | vehicles | six lanes of traffic moving in two directions | speed, density, volume |
| Khan et al., 2017 [74] | Argus-One (from ArgusVision) | 4K, 25 fps | 80, 60 m | 14 min | optical flow tracking (Lucas-Kanade algorithm, background substraction treshold, blob analysis, vehicle extraction—computer vision | vehicles | an urban intersection near the city of Sint-Truiden in Belgium—four-leg intersection | trajectory, speed profile, space-time trajectories |
| Khan et al., 2018 [75] | Argus-One (from Argus-Vision) | 4K, 25 fps | 80, 60 m | 10–12 min | optical flow tracking, blob analysis, Kalman filter | vehicles | a four-legged sub-urban signalized intersection from Sint-Truiden, Belgium | trajectory, speed profile |
| Khan et al., 2020 [76] | NR | NR | NR | NR | detect speed or other traffic violation in real time | vehicles | Saudi Arabia | excess speed limit and other traffic safety violations on highways and roads |
| Kujawski and Dudek 2021 [77] | NR | 720p, 60 fps | NR | 8 h | image processing—blob detection | vehicles in/out | city of Szczecin in Poland—two lanes of traffic each from and to the city | numbers of cars per hour on holiday and workday |
| Li et al., 2019 [78] | DJI-Matrice 100 | 1280 × 960, NR | 80 m | YOLO v3, tracking-by-detection methd, Kalman filter, Hungarian algorithm, motion compensation based on homography, optical flow—RANSAC, adaptive vehicle speed estimation | vehicles | an intersection, country road, parking entrance, highways, and crossroads | vehicle speed estimation, velocity measurement | |
| Li et al., 2020 [79] | DJI Matrice 100 | NR | NR | NR | CNN + SSD—scale-specific prediction based single shot detector (SSP-SSD), Resnet 101, remove redundant detection—OA-NMS (Outlier-Aware Non-Maximum Suppression), comparation with SSD, Cascade RCNN, FRCNN, YOLOV3, YOLOV4, YOLOV5(x), FCOS, Retinanet and CenterNet | Vehicles—small, medium, large | dataset containing 312071 vehicles | performance evaluation—precision, recall rate, F1-score, average precision |
| Liu and Zhang 2021 [28] | NR | NR | NR | NR | YOLO v4, DeepSORT (KF prediction), trajectory estimation—eight-dimensional space, high-precision positioning—interacting multiple model (IMM)—PF (particle filter) algorithm, IMM-PF, CV-EKF, IMM-EKF comparison | cars, buses, trucks, and vans | dataset containing 15,741 images | position, Normalized distance, Model probabilities |
| Luo et al., 2020 [80] | small UAV similar as SkyProwler | 640 × 360, 570 × 640 | NR | NR | blob detection, classifier, dot-product kernels and radial basis function (RBF) kernels, tracking-by-detection, crash decision | vehicles | environment includes city, suburban and rural areas | vehicle trajectory |
| Moranduzzo and Melgani 2014 [81] | hexacopter | 5184 × 3456, NR | NR | NR | feature extraction process based on scalar invariant feature transform (SIFT), classification by means of support vector machine (SVM) classifier, grouping of the key points belonging to the same car | vehicles | NR | accuracy |
| Shan et al., 2021 [82] | DJI Phantom 4 Pro | 3840 × 2160, 25 fps | 150–350 m | NR | Pre-processing, YOLO v3, deep SORT algorithm | vehicles | 1 km long of Xi’an Ring Expresswa—upstream of ZHANG-BA interchange exit | precision of vehicle detection, precision of extracted speed |
| Wan et al., 2019 [83] | NR | NR | NR | NR | joint dictionary, L2 regularization based on temporal consistency, Markov Random Field (MRF)-based binary support vector, particle filter framework along with a dynamic template update scheme; comparation of 9 state-of-the-art visual tracking algorithms, including IV, L1, PCOM, CT, MTT, WMIL, OFDS, STC and CNT | vehicles, pedestrians | UAV videos | precision and success plots, time complexity, execution time |
| Wang et al., 2016a [84] | NR | NR | 80–90 m | 4 h | Shi-Tomasi features, optical flow (Kanade-Lucas algorithm), prediction method—bivariate bivariate extreme value theory (EVT) | vehicles | ten urban signalized intersections in Fengxian District in Shanghai | time-to-accident (TA), post-encroachment Time (PET), minimum time-to-collision (mTTC), and maximum deceleration rate (MaxD) |
| Wang et al., 2016b [85] | MD3-1000 by Germany Microdrones Company | NR | 42.6 m | NR | calculating start-wave velocity at signalized intersections | large, medium and small vehicles | straight lanes at the intersection of Cao-an Highway and North Jia-song Road in Shanghai | speed, density of traffic flow |
| Wang et al., 2019 [86] | DJI Phantom 4 Pro | 2720 × 1530, 30 fps | 60–150 m | NR | YOLOv3, motion estimation based on Kalman filtering is integrated with deep appearance features | vehicles | N/A | true positive (TP), false positive (FP), true negative (TN), false negative (FN), identification precision (IDP), identification recall (IDR), F1 score, multiple-object tracking accuracy (MOTA), mostly tracked (MT), mostly lost (ML), and identity switching (IDSW) |
| Wang et al., 2019 [87] | DJI Phantom 2 | 1920 × 1080, 30 fps | 100–150 m | NR | image registration, image feature extraction—edge (Prewitt edge detection), optical flow (Lucas–Kanade operator), local feature point (SIFT), vehicle detection—shape detection, vehice tracking—optical flow, matched local feature points | vehicles | the north part of the 5th Ring Road in Beijing, China | correctness, completeness and quality—vehicle detection, number of vehicles, error rate |
| Xing et al., 2020a [88] | NR | 4K, 30 fps | NR | NR | logistic regression, time-varying random effects logistic regression (T-RELR) model and time-varying random parameters logistic regression (T-RPLR), two time-varying mixed logit models including time-varying random effects logistic regression (T-RELR) model and time-varying random parameters logistic regression (T-RPLR) are developed to examine the time varying effects of influencing factors on vehicle collision risk | cars, buses and trucks | a toll plaza area on G42 freeway in Nanjing, China -12 toll collection lanes on the east-west direction (north side) and 6 toll collection lanes on the west-east direction (south side) | model performance, time-varying logistic regression model, TTC |
| Xing et al., 2020b [89] | NR | 4K, 30 fps | NR | 50 min | logistic regression model vs. K-Nearest Neighbor (KNN), Artificial Neural Networks (ANN), Support Vector Machines (SVM), Decision Trees (DT), and Random Forest (RF) | vehicles | a toll plaza area on G42 freeway in Nanjing, China | surrogate safety measure (SSM)—extended TTC, model performance |
| Xu et al., 2016 [90] | DJI Phantom 2 | 1920 × 1080, 24 fps | NR | 10 min | Viola-Jones, linear support vector machine (SVM) + histogram of oriented gradients (HOG) features, comparation with 9 other methods | vehicle | NR | detection speed (f/s), correctness, completeness, and quality |
| Zhu et al., 2018a [91] | DJI Inspire 1 Pro | 4K (3840 × 2178), 30 fps | NR | 2 min 47 s | Retina object detector (RetinaNET), associated detections, trajectory modeling and extraction, semi-supervised nearest neighbor search, double spectral clustering (DSC), deep learning model based on Long Short-Term Memory (LSTM) | cars, buses, and trucks | busy road intersection of a modern megacity | trajectory, tracking speed, vehicle behavior recognition |
| Zhu et al., 2018b [92] | DJI Inspire 1 Pro | 4K, 30 fps | NR | 56 min 39 s | deep learning (enhanced single shot multibox detector), support vector machine; comparation with SSD, Faster RCNN (FRC), and YOLO | cars, buses, trucks | five key road intersections in Shenzhen | vehicle counting, counting accuracy |
| Application Field | Main Purpose | Paper |
|---|---|---|
| Traffic analysis | congestion analysis | [77] |
| crash prediction | [86] | |
| vehicle collision detection | [80] | |
| driving behavior modeling | [60] | |
| vehicle trajectories extraction | [61,64,68,74,75] | |
| traffic parameters extraction | [82] | |
| moving synchronized flow patterns observation | [72] | |
| traffic flow parameter estimation | [73] | |
| traffic density estimation | [92] | |
| traffic information collection | [85] | |
| unconventional overtaking decisions identification | [63] | |
| vehicle behavior recognition | [91] | |
| vehicle collision risk evaluation | [88,89] | |
| vehicle-pedestrian conflicts evaluation | [67] | |
| Traffic monitoring | smart monitoring system | [76] |
| traffic streams recording | [65] | |
| vehicle detection | [28,70,71,79,81,90] | |
| vehicle detection and tracking | [62,84,87] | |
| vehicle tracking | [83] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Butilă, E.V.; Boboc, R.G. Urban Traffic Monitoring and Analysis Using Unmanned Aerial Vehicles (UAVs): A Systematic Literature Review. Remote Sens. 2022, 14, 620. https://doi.org/10.3390/rs14030620
Butilă EV, Boboc RG. Urban Traffic Monitoring and Analysis Using Unmanned Aerial Vehicles (UAVs): A Systematic Literature Review. Remote Sensing. 2022; 14(3):620. https://doi.org/10.3390/rs14030620
Chicago/Turabian StyleButilă, Eugen Valentin, and Răzvan Gabriel Boboc. 2022. "Urban Traffic Monitoring and Analysis Using Unmanned Aerial Vehicles (UAVs): A Systematic Literature Review" Remote Sensing 14, no. 3: 620. https://doi.org/10.3390/rs14030620
APA StyleButilă, E. V., & Boboc, R. G. (2022). Urban Traffic Monitoring and Analysis Using Unmanned Aerial Vehicles (UAVs): A Systematic Literature Review. Remote Sensing, 14(3), 620. https://doi.org/10.3390/rs14030620