
Sentinel-2 Detection of Floating Marine Litter Targets with Partial Spectral Unmixing and Spectral Comparison with Other Floating Materials (Plastic Litter Project 2021)

 ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
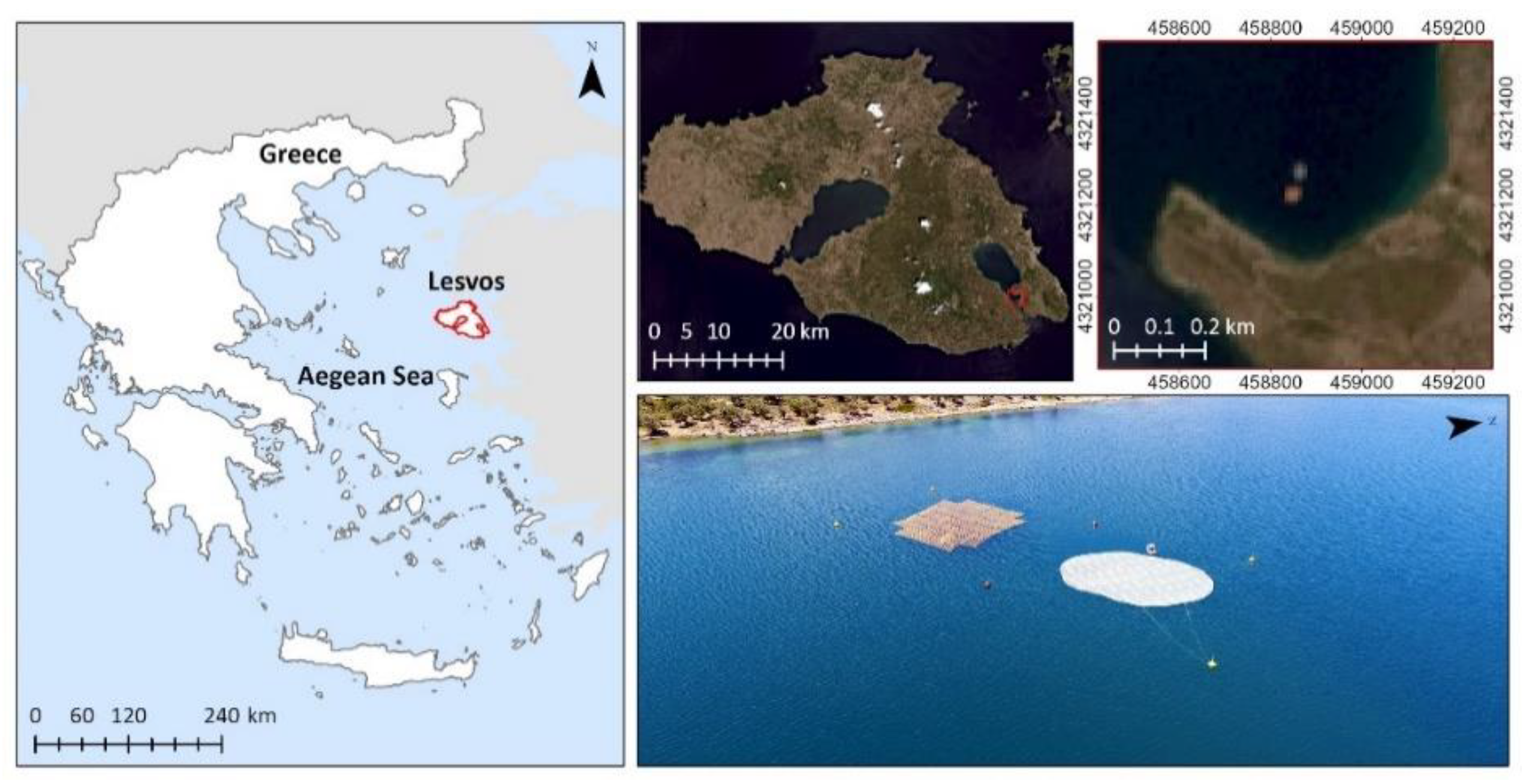
2.1. Overview of the Plastic Litter Project 2020–2021
- To develop long-term deployment targets for extended acquisition campaigns that would not require re-deployment for each satellite overpass.
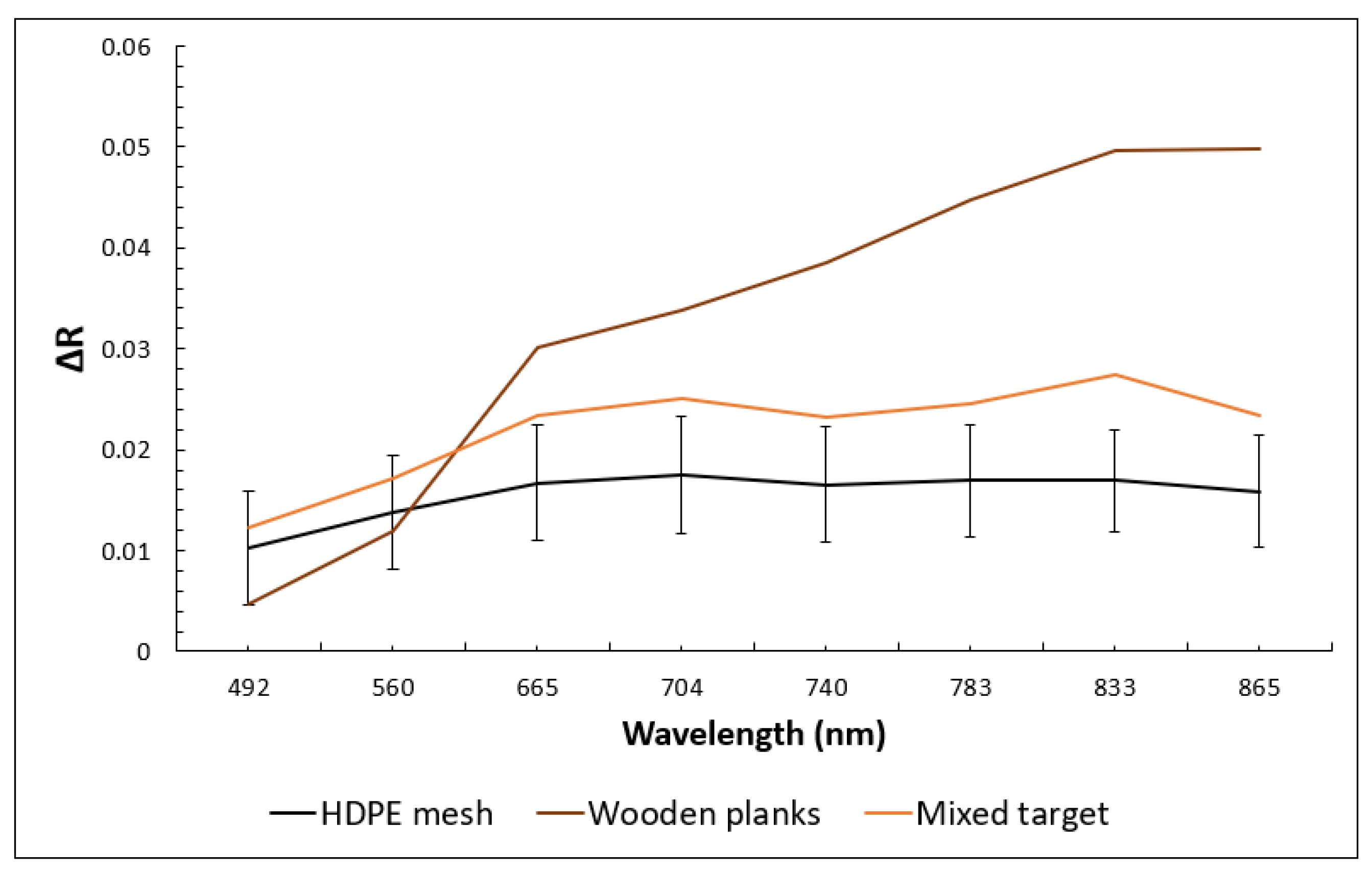
- To acquire the spectral response of a 10 m × 10 m Sentinel-2 pixel that is fully covered by the target materials, including the FML reference target material, a wooden target material approximating natural floating debris aggregations and a mixed target configuration.
- To run a long-term data acquisition campaign during the summer–autumn period of 2021 and acquire a range of data including Sentinel-2 and high-resolution UAS data.
- To assess the effects that environmental factors such as biofouling and submersion depth have on the spectral response of FML.
- To assess the capability of remote detection of floating marine litter with partial unmixing methodologies using the Sentinel-2 satellite.
2.2. Experimental Set-Up–Acquisition Campaign
- (a)
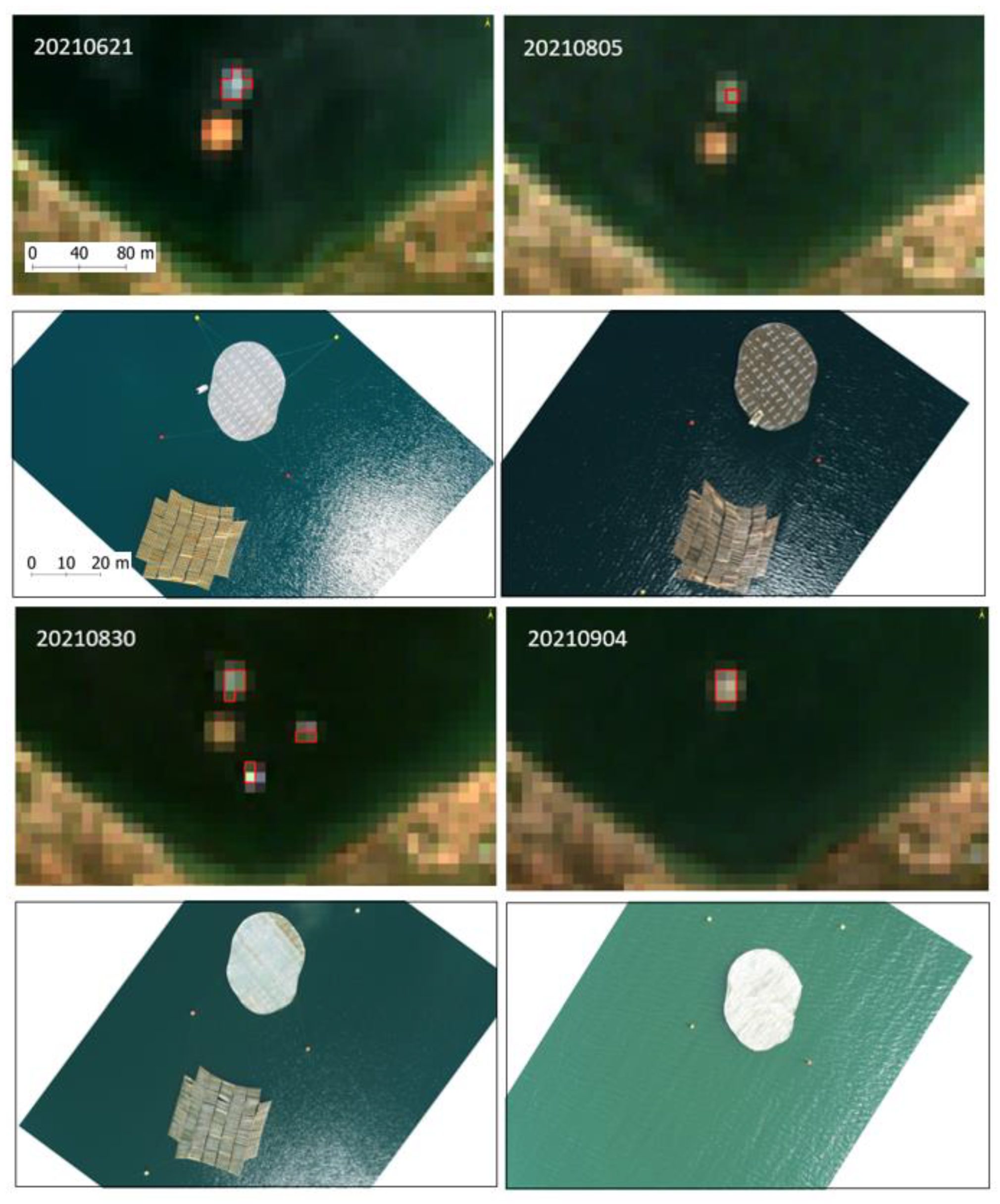
- HDPE mesh target representative of floating marine litter—the target is comprised of a single 28 m diameter ring, constructed using four 22 m long sections of 63 mm diameter HDPE irrigation piping, connected using compression fittings. The HDPE mesh is composed of a series of 1.2 m wide HDPE mesh sheets stitched together and attached to the target ring using 5 mm thin nylon rope. The HDPE mesh was selected as a target material to be representative of FML aggregations, after consideration between a series of materials, since it fulfilled a set of requirements; namely: spectral signature representative of FML, ability to construct large area targets, durability for long-term deployment, availability, and cost. The white HDPE mesh colour was chosen based on the fact that white and transparent are the most common colours of plastic marine litter [10]. The mesh has a density of 0.955 gr/cm3, it is produced through extrusion and is coloured using an HDPE-based, food-safe paint at a 0.8% w/w ratio.
- (b)
- Wooden planks target representative of natural floating woody debris—the wooden target was constructed using 342 wooden planks, each 4 m long and 22 cm wide. The planks were tethered together in groups of 9 planks, 38 groups in total, connected in a rectangular grid pattern, creating a formation that encloses a theoretical 28 m diameter circle, to achieve the same pixel area coverage as the HDPE mesh target.
- (c)
- Mixed target configuration representative of mixed natural and plastic floating debris—the mixed target configuration was produced by combining both targets into a single set-up. The wooden planks target was positioned underneath the HDPE mesh target, effectively taking up the space of the HDPE mesh holes.
2.3. Overview of Acquired Data
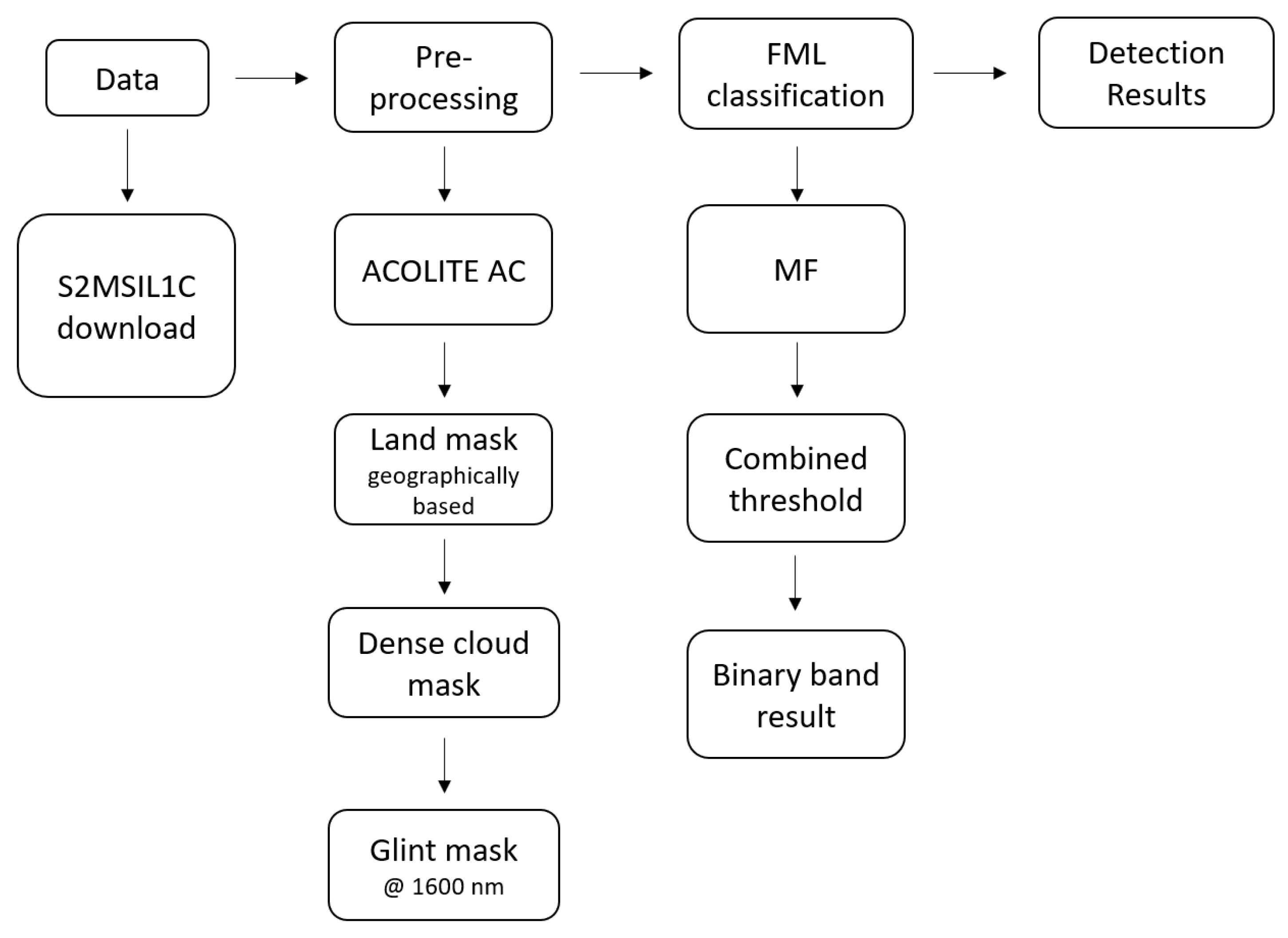
2.4. Sentinel-2 Data Pre-Processing
2.5. Spectral Analysis
2.6. Spectral Indices
2.7. Reversed Spectral Unmixing
2.8. Partial Unmixing
3. Results
3.1. Spectral Analysis
3.1.1. Reversed Spectral Unmixing
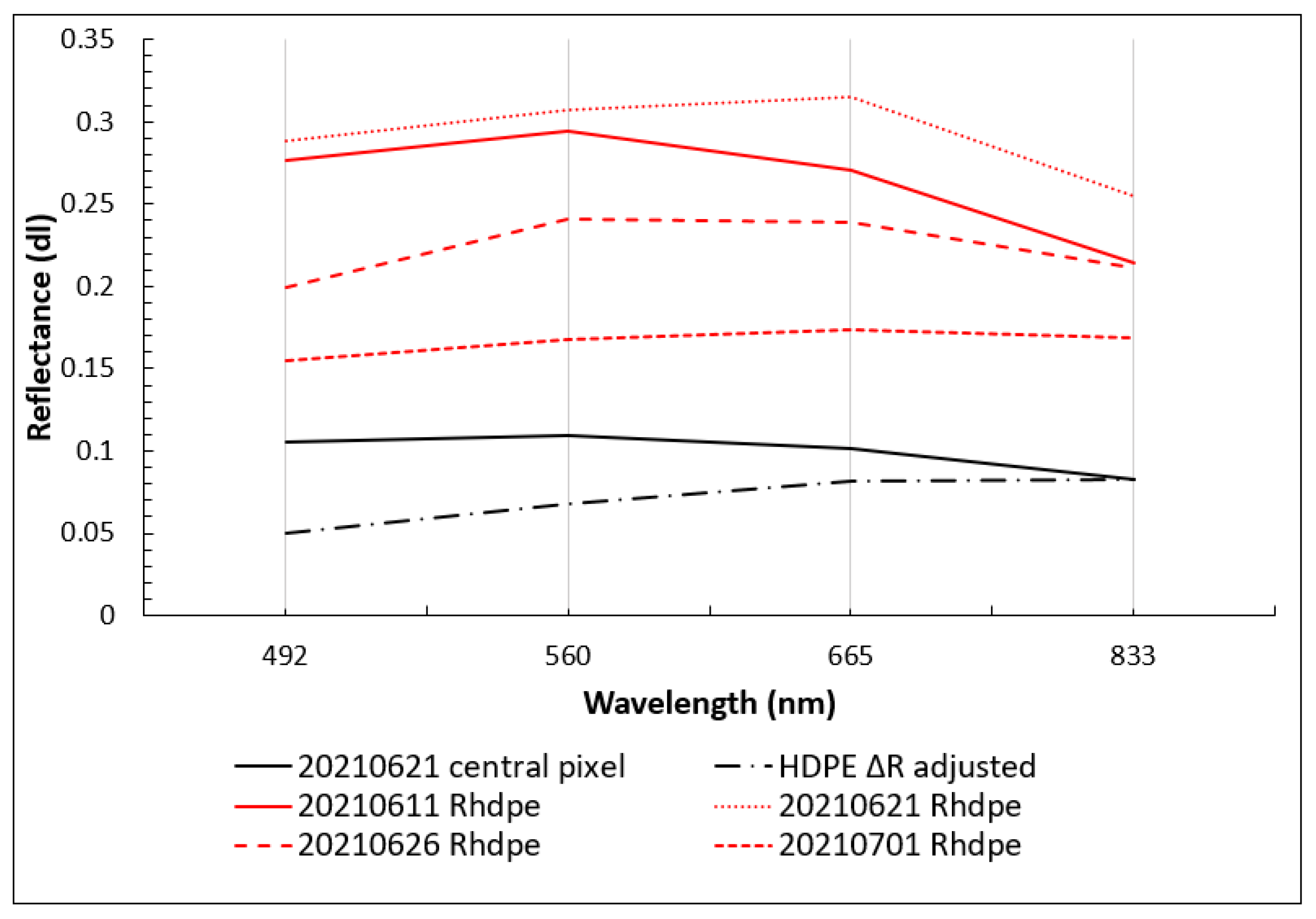
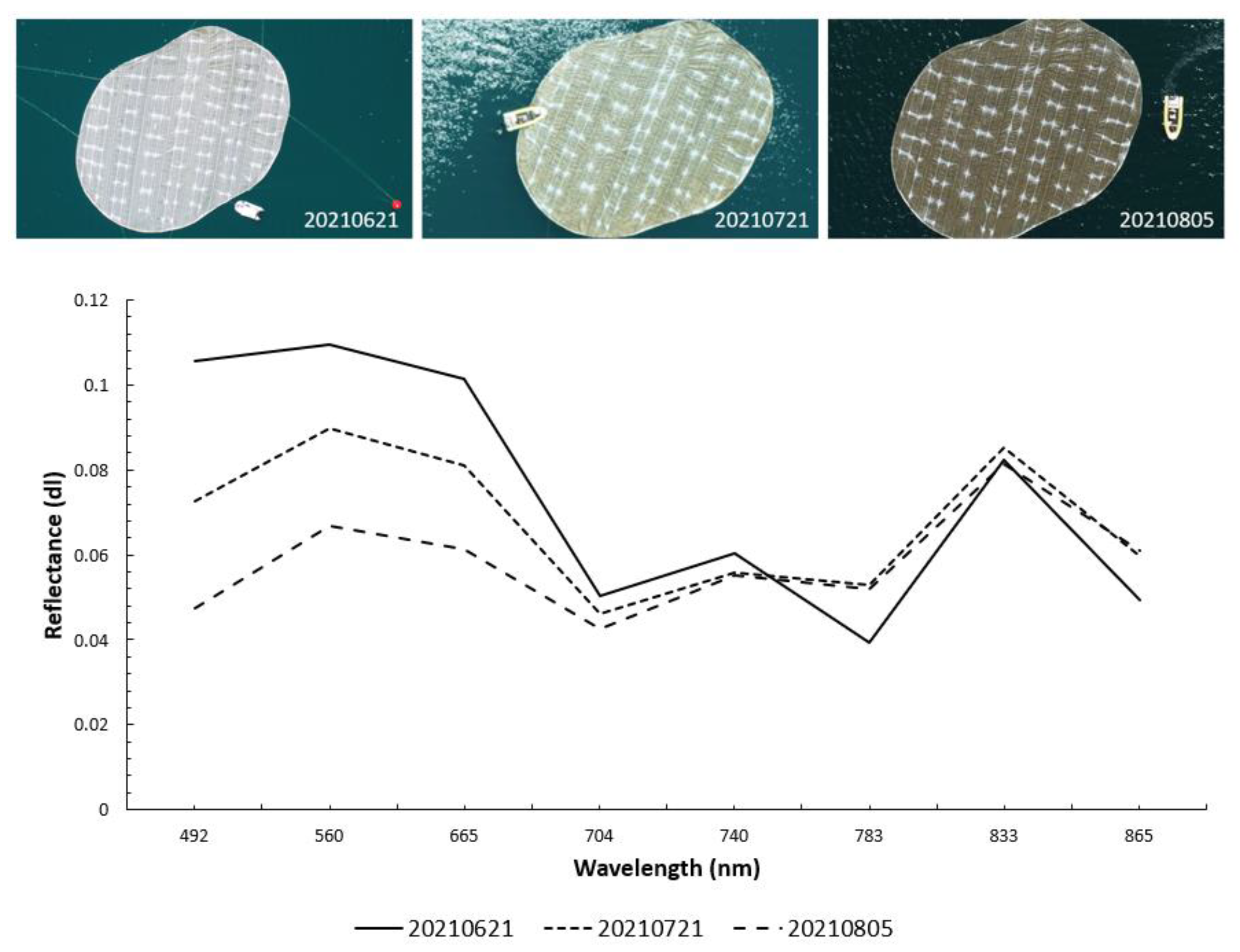
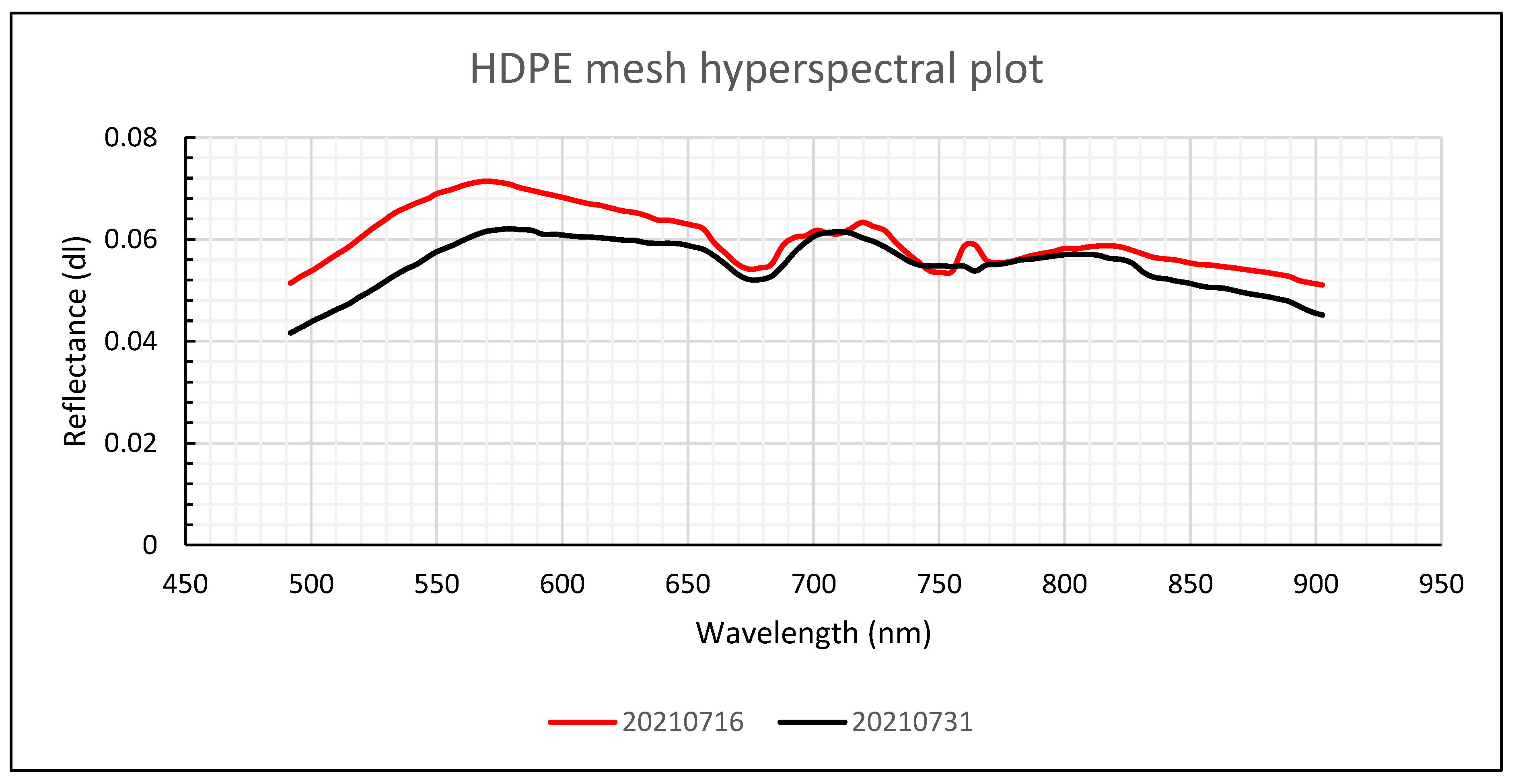
3.1.2. Biofouling Effects on HDPE Mesh Spectrum
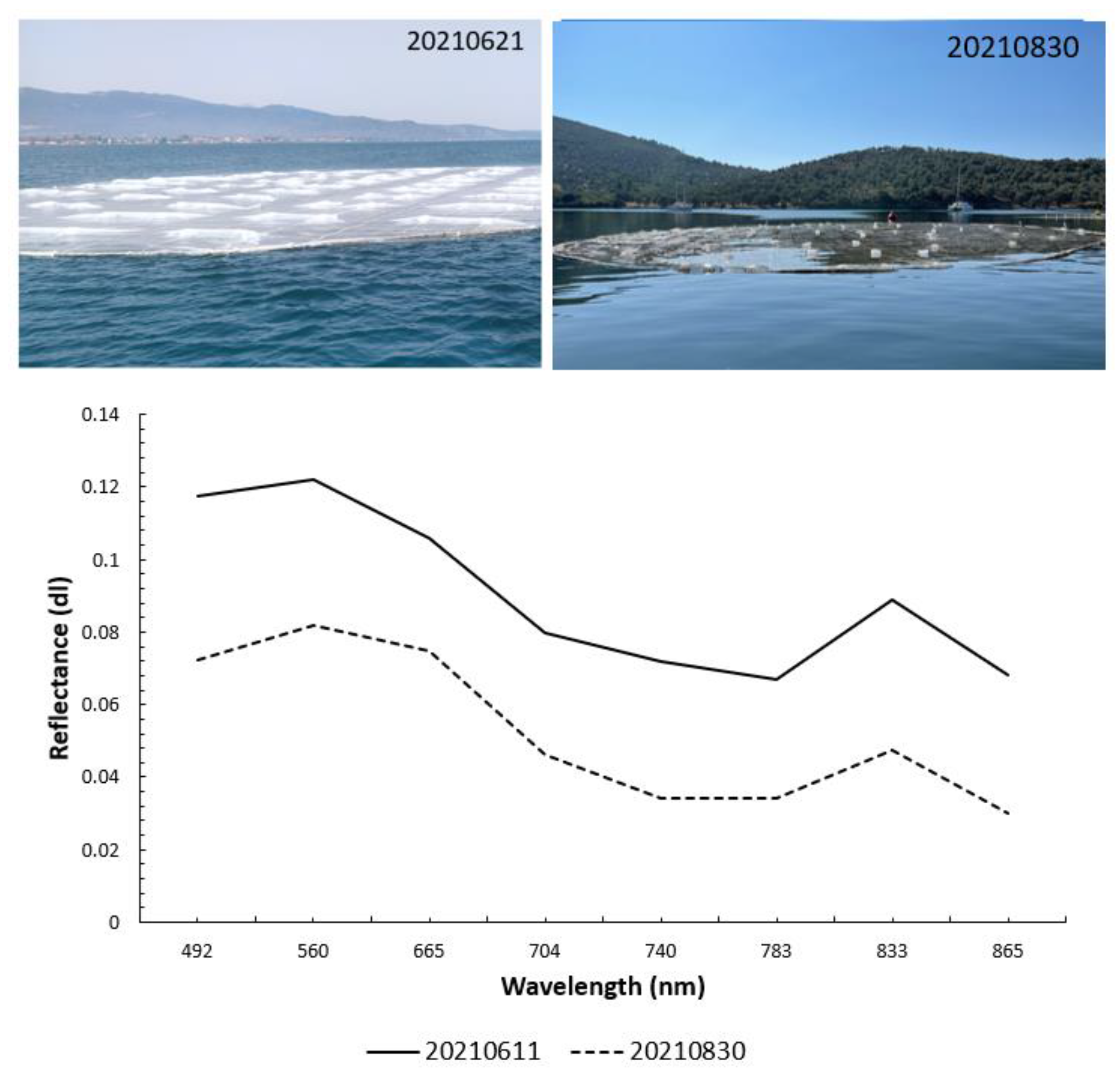
3.1.3. Submersion Effects on HDPE Mesh Spectrum
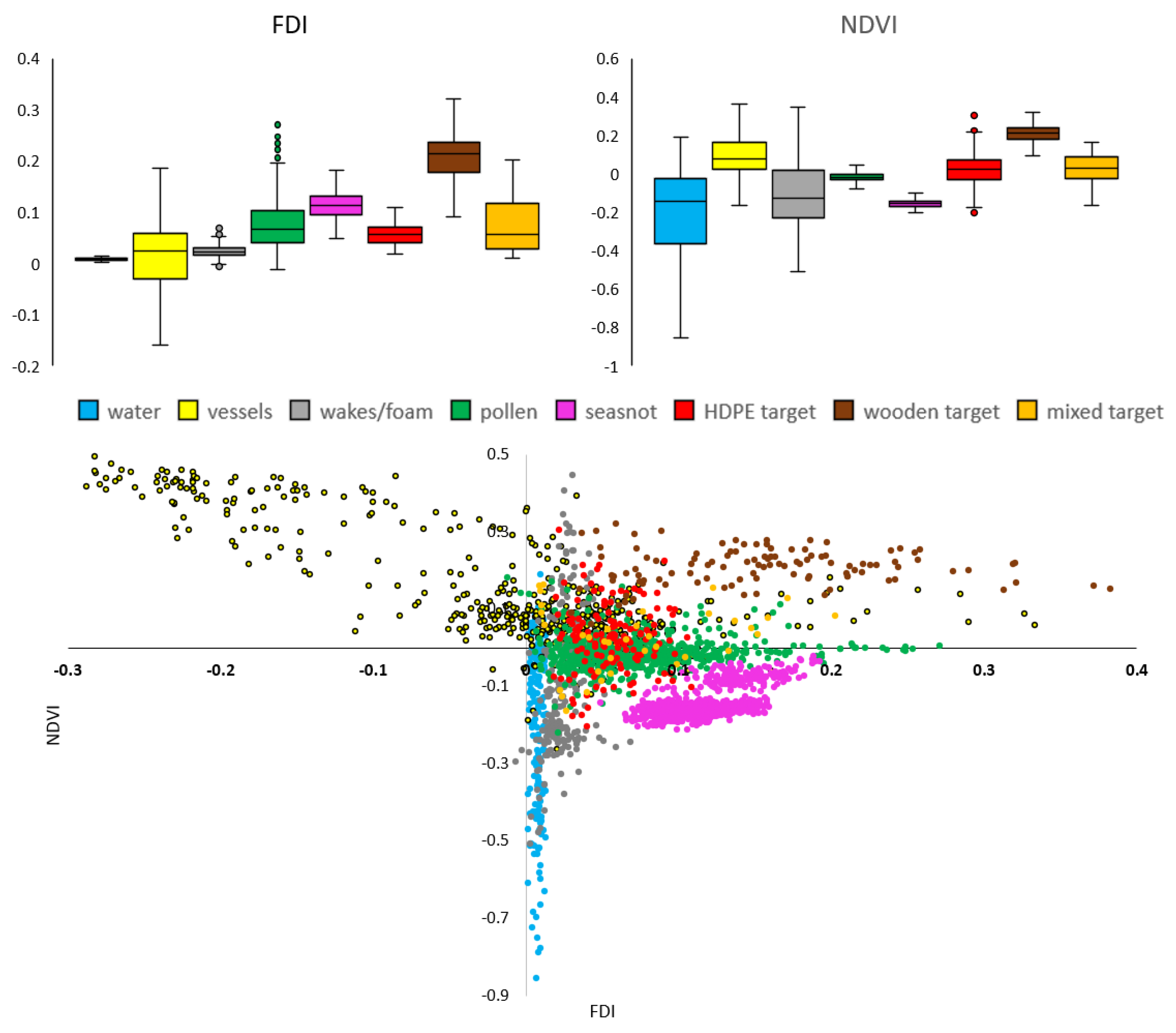
3.1.4. Spectral Indices
3.2. Detection of FML with Partial Unmixing
4. Conclusions
- Biofouling seems to affect the spectral response of FML concentrations mainly in terms of signal intensity and shape in the RGB part of the spectrum. The NIR bands do not show any significant effect of biofouling in these parts of the spectrum. The shape of the HDPE spectral response is affected by biofouling accumulations to a significant degree. These findings correspond with the absorption features of chlorophyll, although we do not see a stable reflectance on the green part of the spectrum. Further study is required in order to better understand and quantify the effects of biofouling, as well as the characteristics of the specific organisms involved.
- Submersion depth significantly affects the reflectance of the HDPE mesh target. A submersion of the target in the scale of 20 to 30 cm below the water surface results in 30–40% of signal decay throughout the visible range of the MSI’s sensor, with greater impact on NIR bands. Such signal decrease could have implications for the detection of FML, since FML accumulations are very often partially or fully submerged under the water surface, in some cases to depths much greater than 30 cm. However, using the partial unmixing methodology, it was possible to detect partially submerged target pixels.
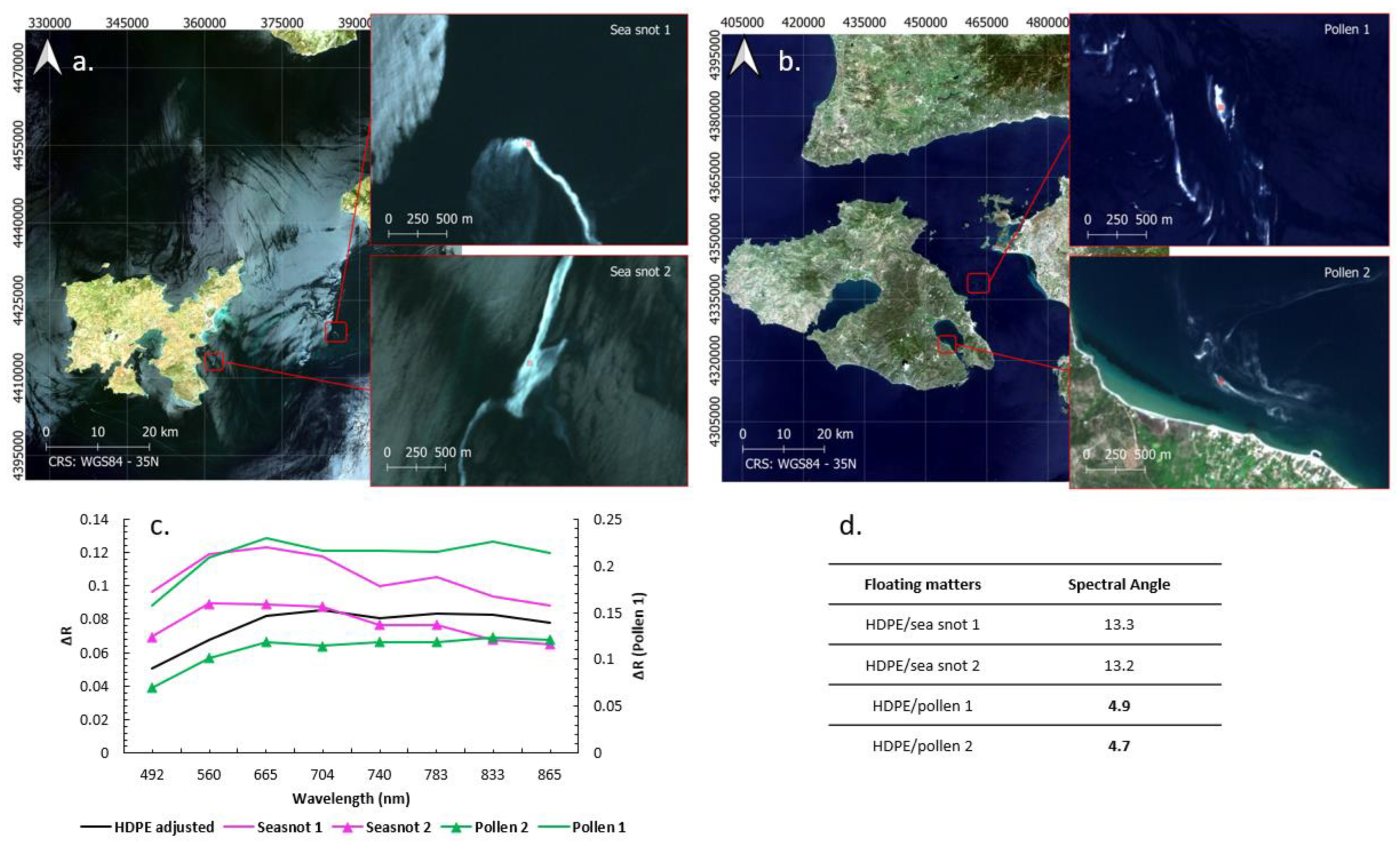
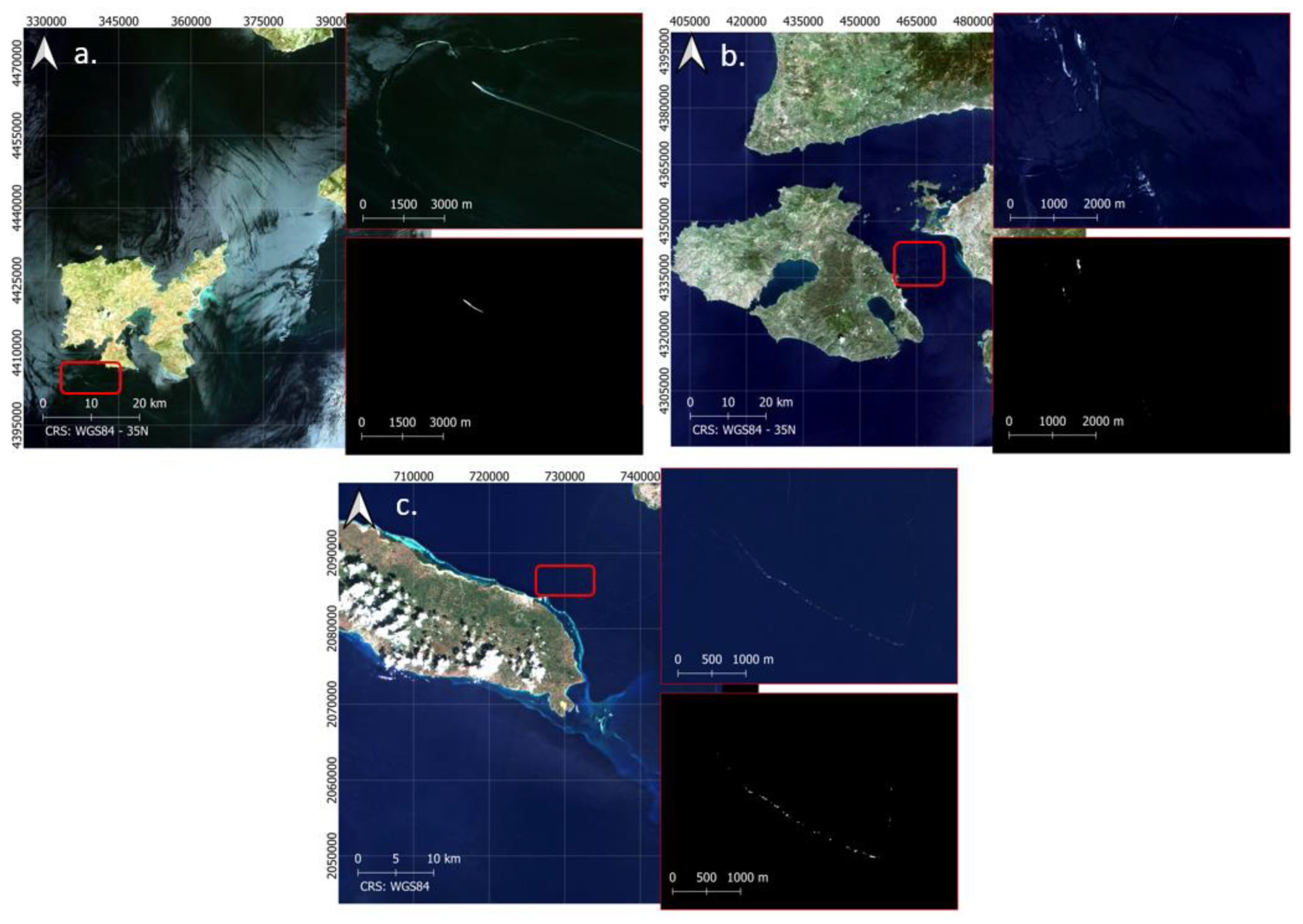
- Floating materials such as pollen and sea snot, as well as wakes, foam and vessels have spectral features comparable to those of FML, with spectral angles between the different spectra that show significant similarities. Pollen is specifically hard to discriminate and presents an important constraining factor when it comes to FML pixel classification.
- FML detection using partial unmixing methodologies with ACOLITE atmospherically corrected Sentinel-2 data is generally possible under reasonable conditions, with a minimum estimated abundance fraction of lower than 20% being detectable.
- Other floating features such as pollen, vessels and vessel wakes are hard to discriminate from FML using the proposed algorithm since they have very similar spectral characteristics to those of FML.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Borrelle, S.B.; Ringma, J.; Law, K.L.; Monnahan, C.C.; Lebreton, L.; McGivern, A.; Murphy, E.; Jambeck, J.; Leonard, G.H.; Hilleary, M.A.; et al. Predicted growth in plastic waste exceeds efforts to mitigate plastic pollution. Science 2020, 369, 1515–1518. [Google Scholar] [CrossRef] [PubMed]
- Worm, B.; Lotze, H.K.; Jubinville, I.; Wilcox, C.; Jambeck, J. Plastic as a Persistent Marine Pollutant. Annu. Rev. Environ. Resour. 2017, 42, 1–26. [Google Scholar] [CrossRef]
- Villarrubia-Gómez, P.; Cornell, S.E.; Fabres, J. Marine plastic pollution as a planetary boundary threat–The drifting piece in the sustainability puzzle. Mar. Policy 2018, 96, 213–220. [Google Scholar] [CrossRef]
- MacLeod, M.; Arp, H.P.H.; Tekman, M.B.; Jahnke, A. The global threat from plastic pollution. Science 2021, 373, 61–65. [Google Scholar] [CrossRef] [PubMed]
- Bank, M.S.; Swarzenski, P.W.; Duarte, C.M.; Rillig, M.C.; Koelmans, A.A.; Metian, M.; Wright, S.; Provencher, J.F.; Sanden, M.; Jordaan, A.; et al. Global Plastic Pollution Observation System to Aid Policy. Environ. Sci. Technol. 2021, 55, 7770–7775. [Google Scholar] [CrossRef] [PubMed]
- Ryan, P.G.; Moore, C.J.; Van Franeker, J.A.; Moloney, C. Monitoring the abundance of plastic debris in the marine environment. Philos. Trans. R. Soc. B Biol. Sci. 2009, 364, 1999–2012. [Google Scholar] [CrossRef]
- Ryan, P.G.; Pichegru, L.; Perold, V.; Moloney, C.L. Monitoring marine plastics–will we know if we are making a difference? South Afr. J. Sci. 2020, 116, 58–66. [Google Scholar] [CrossRef]
- Suaria, G.; Berta, M.; Griffa, A.; Molcard, A.; Özgökmen, T.M.; Zambianchi, E.; Aliani, S. Dynamics of Transport, Accumulation, and Export of Plastics at Oceanic Fronts. In The Handbook of Environmental Chemistry; Springer: Cham, Switzerland, 2021; pp. 1–51. [Google Scholar] [CrossRef]
- Maximenko, N.; Corradi, P.; Law, K.L.; Van Sebille, E.; Garaba, S.P.; Lampitt, R.S.; Galgani, F.; Martinez-Vicente, V.; Goddijn-Murphy, L.; Veiga, J.M.; et al. Toward the Integrated Marine Debris Observing System. Front. Mar. Sci. 2019, 6, 447. [Google Scholar] [CrossRef]
- Garaba, S.P.; Aitken, J.; Slat, B.; Dierssen, H.M.; Lebreton, L.; Zielinski, O.; Reisser, J. Sensing Ocean Plastics with an Airborne Hyperspectral Shortwave Infrared Imager. Environ. Sci. Technol. 2018, 52, 11699–11707. [Google Scholar] [CrossRef]
- Garaba, S.P.; Dierssen, H.M. Hyperspectral ultraviolet to shortwave infrared characteristics of marine-harvested, washed-ashore and virgin plastics. Earth Syst. Sci. Data 2020, 12, 77–86. [Google Scholar] [CrossRef]
- Garaba, S.P.; Dierssen, H.M. An airborne remote sensing case study of synthetic hydrocarbon detection using short wave infrared absorption features identified from marine-harvested macro- and microplastics. Remote. Sens. Environ. 2018, 205, 224–235. [Google Scholar] [CrossRef]
- Tasseron, P.; van Emmerik, T.; Peller, J.; Schreyers, L.; Biermann, L. Advancing Floating Macroplastic Detection from Space Using Experimental Hyperspectral Imagery. Remote. Sens. 2021, 13, 2335. [Google Scholar] [CrossRef]
- Goddijn-Murphy, L.; Dufaur, J. Proof of concept for a model of light reflectance of plastics floating on natural waters. Mar. Pollut. Bull. 2018, 135, 1145–1157. [Google Scholar] [CrossRef]
- Garaba, S.P.; Harmel, T. Top-of-atmosphere hyper and multispectral signatures of submerged plastic litter with changing water clarity and depth. Opt. Express 2022, 30, 16553. [Google Scholar] [CrossRef]
- Moshtaghi, M.; Knaeps, E.; Sterckx, S.; Garaba, S.; Meire, D. Spectral reflectance of marine macroplastics in the VNIR and SWIR measured in a controlled environment. Sci. Rep. 2021, 11, 1–12. [Google Scholar] [CrossRef]
- Knaeps, E.; Sterckx, S.; Strackx, G.; Mijnendonckx, J.; Moshtaghi, M.; Garaba, S.P.; Meire, D. Hyperspectral-reflectance dataset of dry, wet and submerged marine litter. Earth Syst. Sci. Data 2021, 13, 713–730. [Google Scholar] [CrossRef]
- Topouzelis, K.; Papakonstantinou, A.; Garaba, S.P. Detection of floating plastics from satellite and unmanned aerial systems (Plastic Litter Project 2018). Int. J. Appl. Earth Obs. Geoinf. ITC J. 2019, 79, 175–183. [Google Scholar] [CrossRef]
- Topouzelis, K.; Papageorgiou, D.; Karagaitanakis, A.; Papakonstantinou, A.; Ballesteros, M.A. Remote Sensing of Sea Surface Artificial Floating Plastic Targets with Sentinel-2 and Unmanned Aerial Systems (Plastic Litter Project 2019). Remote. Sens. 2020, 12, 2013. [Google Scholar] [CrossRef]
- Kremezi, M.; Kristollari, V.; Karathanassi, V.; Topouzelis, K.; Kolokoussis, P.; Taggio, N.; Aiello, A.; Ceriola, G.; Barbone, E.; Corradi, P. Pansharpening PRISMA Data for Marine Plastic Litter Detection Using Plastic Indexes. IEEE Access 2021, 9, 61955–61971. [Google Scholar] [CrossRef]
- Themistocleous, K.; Papoutsa, C.; Michaelides, S.; Hadjimitsis, D. Investigating Detection of Floating Plastic Litter from Space Using Sentinel-2 Imagery. Remote Sens. 2020, 12, 2648. [Google Scholar] [CrossRef]
- Kikaki, A.; Karantzalos, K.; Power, C.A.; Raitsos, D.E. Remotely Sensing the Source and Transport of Marine Plastic Debris in Bay Islands of Honduras (Caribbean Sea). Remote Sens. 2020, 12, 1727. [Google Scholar] [CrossRef]
- Kikaki, K.; Kakogeorgiou, I.; Mikeli, P.; Raitsos, D.E.; Karantzalos, K. MARIDA: A benchmark for Marine Debris detection from Sentinel-2 remote sensing data. PLoS ONE 2022, 17, e0262247. [Google Scholar] [CrossRef] [PubMed]
- Mikeli, P.; Kikaki, K.; Kakogeorgiou, I.; Karantzalos, K. How challenging is the discrimination of floating materials on the sea surface using high resolution multispectral satellite data? Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 43, 151–157. [Google Scholar] [CrossRef]
- Hu, C. Remote detection of marine debris using satellite observations in the visible and near infrared spectral range: Challenges and potentials. Remote. Sens. Environ. 2021, 259, 112414. [Google Scholar] [CrossRef]
- Hu, C.; Qi, L.; Xie, Y.; Zhang, S.; Barnes, B.B. Spectral characteristics of sea snot reflectance observed from satellites: Implications for remote sensing of marine debris. Remote Sens. Environ. 2021, 269, 112842. [Google Scholar] [CrossRef]
- Biermann, L.; Clewley, D.; Martinez-Vicente, V.; Topouzelis, K. Finding Plastic Patches in Coastal Waters Using Optical Satellite Data. Nat. Commun. 2020; accepted. [Google Scholar]
- Sannigrahi, S.; Basu, B.; Basu, A.S.; Pilla, F. Development of automated marine floating plastic detection system using Sentinel-2 imagery and machine learning models. Mar. Pollut. Bull. 2022, 178, 113527. [Google Scholar] [CrossRef]
- Basu, B.; Sannigrahi, S.; Basu, A.S.; Pilla, F. Development of Novel Classification Algorithms for Detection of Floating Plastic Debris in Coastal Water Bodies Using Multispectral Sentinel-2 Remote Sensing Imagery. Remote Sens. 2021, 13, 1598. [Google Scholar] [CrossRef]
- Ciappa, A.C. Marine plastic litter detection offshore Hawai’i by Sentinel-Mar. Pollut. Bull. 2021, 168, 112457. [Google Scholar] [CrossRef]
- Ciappa, A.C. Marine Litter Detection by Sentinel-2: A Case Study in North Adriatic (Summer 2020). Remote Sens. 2022, 14, 2409. [Google Scholar] [CrossRef]
- Kremezi, M.; Kristollari, V.; Karathanassi, V.; Topouzelis, K.; Kolokoussis, P.; Taggio, N.; Aiello, A.; Ceriola, G.; Barbone, E.; Corradi, P. Increasing the Sentinel-2 potential for marine plastic litter monitoring through image fusion techniques. Mar. Pollut. Bull. 2022, 182, 113974. [Google Scholar] [CrossRef]
- Mifdal, J.; Longépé, N.; Rußwurm, M. Towards detecting floating objects on a global scale with learned spatial features using sentinel 2. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 5, 285–293. [Google Scholar] [CrossRef]
- Goddijn-Murphy, L.; Peters, S.; van Sebille, E.; James, N.A.; Gibb, S. Concept for a hyperspectral remote sensing algorithm for floating marine macro plastics. Mar. Pollut. Bull. 2018, 126, 255–262. [Google Scholar] [CrossRef]
- Goddijn-Murphy, L.; Williamson, B. On Thermal Infrared Remote Sensing of Plastic Pollution in Natural Waters. Remote Sens. 2019, 11, 2159. [Google Scholar] [CrossRef]
- Goddijn-Murphy, L.; Williamson, B.J.; McIlvenny, J.; Corradi, P. Using a UAV Thermal Infrared Camera for Monitoring Floating Marine Plastic Litter. Remote Sens. 2022, 14, 3179. [Google Scholar] [CrossRef]
- Biermann, L.; Vincente, V.M.; Sailley, S.; Mata, A.; Steele, C. Towards a Method for Detecting Macroplastics by Satellite: Examining Sentinel-2 Earth Observation Data for Floating Debris in the Coastal Zone. Geophys. Res. Abstr. 2019, 21, 2019–17469. [Google Scholar]
- Martínez-Vicente, V.; Clark, J.R.; Corradi, P.; Aliani, S.; Arias, M.; Bochow, M.; Bonnery, G.; Cole, M.; Cózar, A.; Donnelly, R.; et al. Measuring Marine Plastic Debris from Space: Initial Assessment of Observation Requirements. Remote Sens. Environ. 2019, 11, 2443. [Google Scholar] [CrossRef]
- Topouzelis, K.; Papageorgiou, D.; Suaria, G.; Aliani, S. Floating marine litter detection algorithms and techniques using optical remote sensing data: A review. Mar. Pollut. Bull. 2021, 170, 112675. [Google Scholar] [CrossRef]
- Papageorgiou, D.; Topouzelis, K. Plastic Litter Project 2021 Dataset [Data set]. Zenodo. 2022. Available online: https://zenodo.org/record/7085112 (accessed on 22 September 2022).
- Vanhellemont, Q. Adaptation of the dark spectrum fitting atmospheric correction for aquatic applications of the Landsat and Sentinel-2 archives. Remote. Sens. Environ. 2019, 225, 175–192. [Google Scholar] [CrossRef]
- Hu, C. Remote detection of marine debris using Sentinel-2 imagery: A cautious note on spectral interpretations. Mar. Pollut. Bull. 2022, 183, 114082. [Google Scholar] [CrossRef]
- Kruse, F.A.; Lefkoff, A.B.; Boardman, J.W.; Heidebrecht, K.B.; Shapiro, A.T.; Barloon, P.J.; Goetz, A.F.H. The spectral image processing system (SIPS)—interactive visualization and analysis of imaging spectrometer data. Remote Sens. Environ. 1993, 44, 145–163. [Google Scholar] [CrossRef]
- Harsanyi, J.C.; Chang, C.-I. Hyperspectral image classification and dimensionality reduction: An orthogonal subspace projection approach. IEEE Trans. Geosci. Remote Sens. 1994, 32, 779–785. [Google Scholar] [CrossRef]
- Guidi, L.; Tattini, M.; Landi, M. How Does Chloroplast Protect Chlorophyll Against Excessive Light. In Chlorophyll; Intech: London, UK, 2017. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition | State * | Biofouling | Wind | Secchi Depth |
|---|---|---|---|---|
| 20210611 | floating | no | low | - |
| 20210621 | floating | no | no | 8 m |
| 20210626 | floating | no | no | - |
| 20210701 | floating | no | low | 8.5 m |
| 20210706 | floating | low | no | 8 m |
| 20210711 | floating | mid | high | 6.8 m |
| 20210716 | floating | mid | no | 8 m |
| 20210721 | floating | mid/high | low | 8 m |
| 20210726 | floating | mid/high | high | 6.8 m |
| 20210731 | floating | high | no | 8 m |
| 20210805 | floating | high | no | 8 m |
| 20210810 | floating | high | low | 8 m |
| 20210815 | submerged | high | - | - |
| 20210820 | submerged | high | mid | - |
| 20210825 | part sub | high | no | - |
| 20210830 | part sub | low | low | - |
| 20210904 | mix floating | low | mid | - |
| 20210909 | mix part sub | mid | mid | - |
| 20210914 | mix mostly sub | mid | high | 5 m |
| 20210919 | mix mostly sub | mid | mid | 7 m |
| 20210924 | mostly sub | mid/high | - | - |
| 20211004 | mostly sub | high | high | - |
| Band | Central Wavelength (nm) | Bandwidth (nm) | Resolution (m) |
|---|---|---|---|
| B2 | 492 | 65 | 10 |
| B3 | 560 | 35 | 10 |
| B4 | 665 | 30 | 10 |
| B5 | 704 | 15 | 20 |
| B6 | 740 | 15 | 20 |
| B7 | 783 | 20 | 20 |
| B8 | 833 | 115 | 10 |
| B8a | 865 | 20 | 20 |
| B11 | 1610 | 90 | 20 |
| B12 | 2190 | 180 | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papageorgiou, D.; Topouzelis, K.; Suaria, G.; Aliani, S.; Corradi, P. Sentinel-2 Detection of Floating Marine Litter Targets with Partial Spectral Unmixing and Spectral Comparison with Other Floating Materials (Plastic Litter Project 2021). Remote Sens. 2022, 14, 5997. https://doi.org/10.3390/rs14235997
Papageorgiou D, Topouzelis K, Suaria G, Aliani S, Corradi P. Sentinel-2 Detection of Floating Marine Litter Targets with Partial Spectral Unmixing and Spectral Comparison with Other Floating Materials (Plastic Litter Project 2021). Remote Sensing. 2022; 14(23):5997. https://doi.org/10.3390/rs14235997
Chicago/Turabian StylePapageorgiou, Dimitris, Konstantinos Topouzelis, Giuseppe Suaria, Stefano Aliani, and Paolo Corradi. 2022. "Sentinel-2 Detection of Floating Marine Litter Targets with Partial Spectral Unmixing and Spectral Comparison with Other Floating Materials (Plastic Litter Project 2021)" Remote Sensing 14, no. 23: 5997. https://doi.org/10.3390/rs14235997
APA StylePapageorgiou, D., Topouzelis, K., Suaria, G., Aliani, S., & Corradi, P. (2022). Sentinel-2 Detection of Floating Marine Litter Targets with Partial Spectral Unmixing and Spectral Comparison with Other Floating Materials (Plastic Litter Project 2021). Remote Sensing, 14(23), 5997. https://doi.org/10.3390/rs14235997