
Repeated (4D) Marine Geophysical Surveys as a Tool for Studying the Coastal Environment and Ground-Truthing Remote-Sensing Observations and Modeling


 ,
,  ,
,  ,
,  ,
,  ,
, 
Abstract
1. Introduction
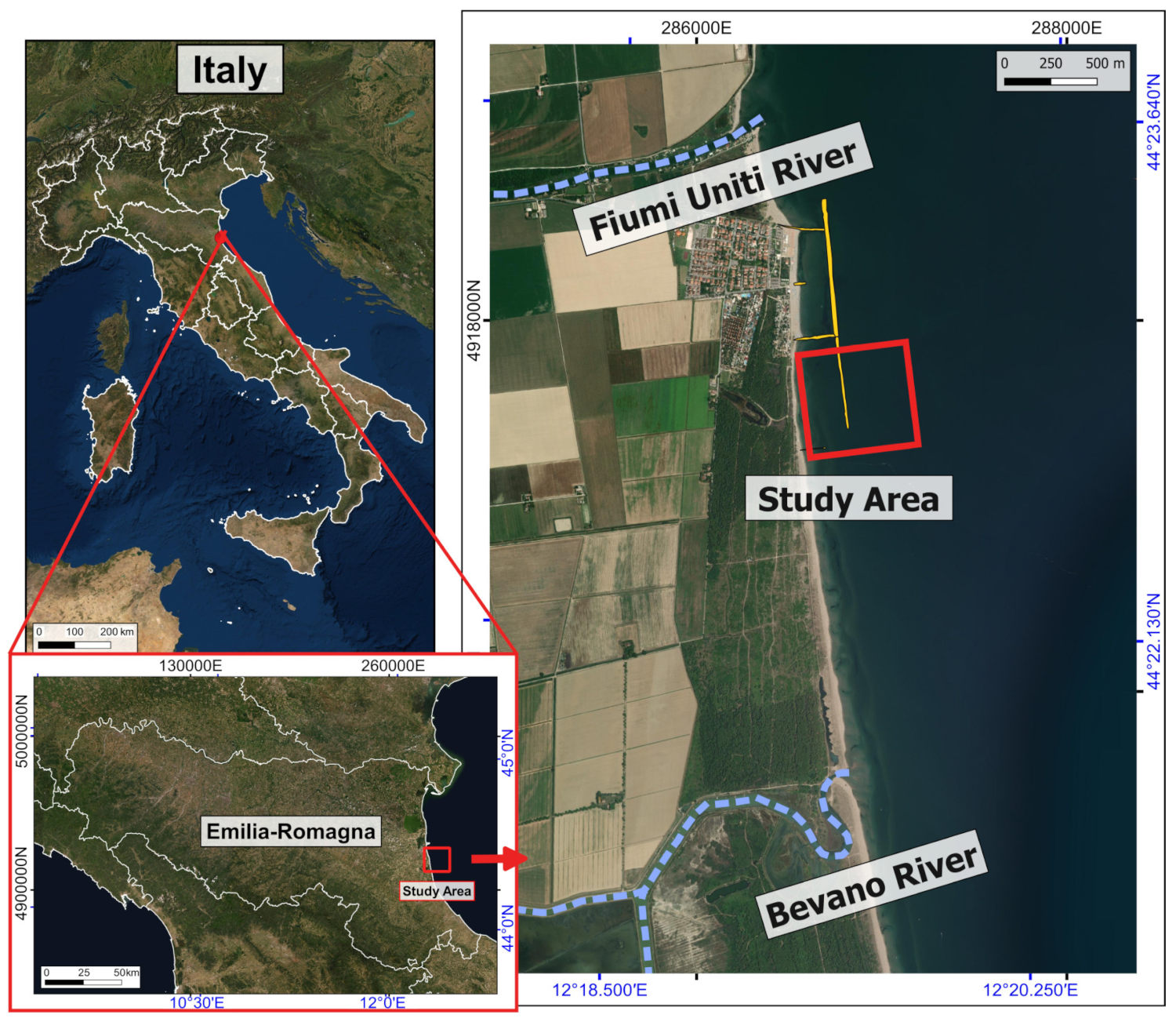
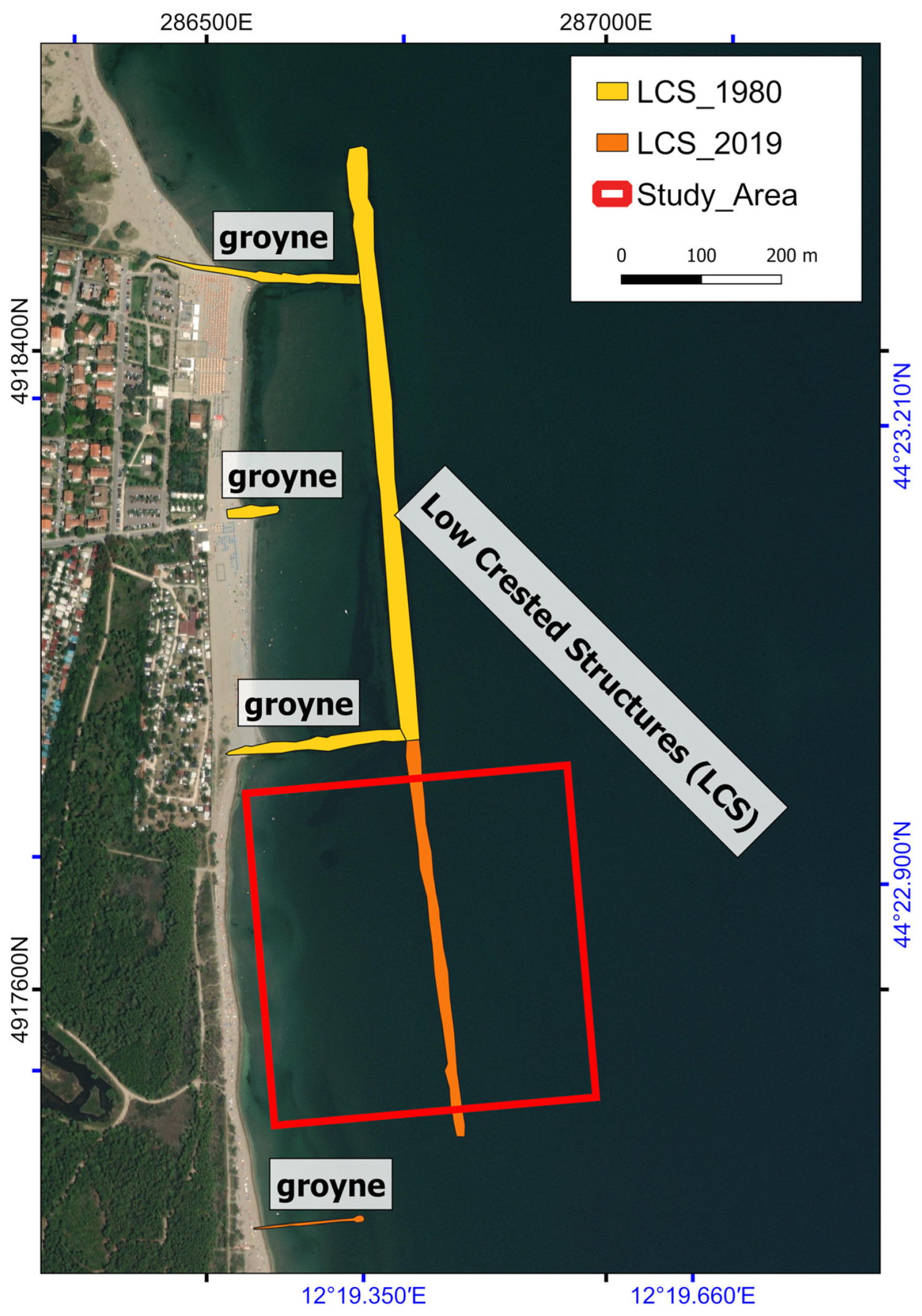
The Study Site
2. Materials and Methods
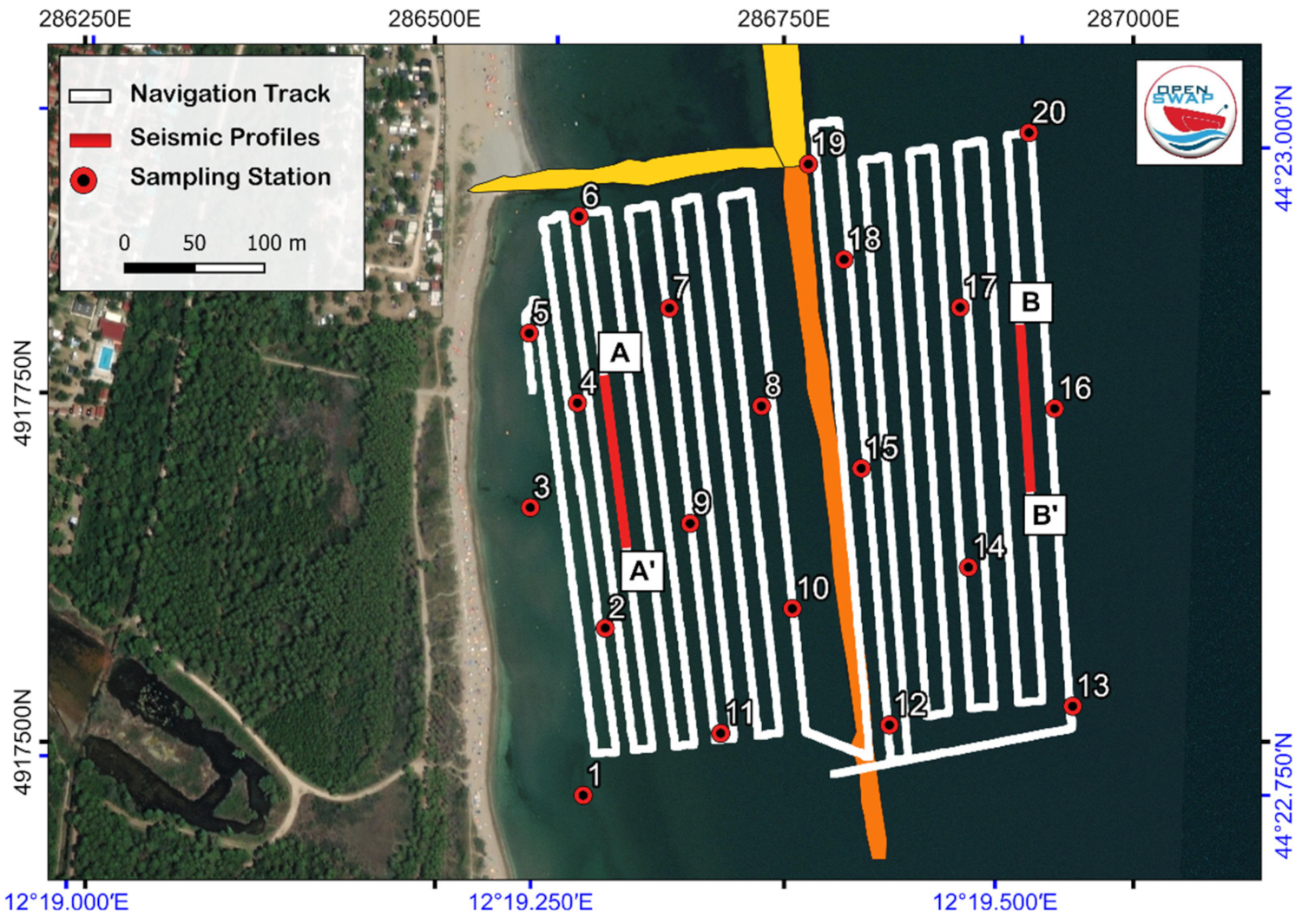
2.1. Geophysical Survey
2.1.1. Positioning and Navigation
2.1.2. Bathymetric Data
2.1.3. Seafloor Reflectivity
2.1.4. Stratigraphic Data
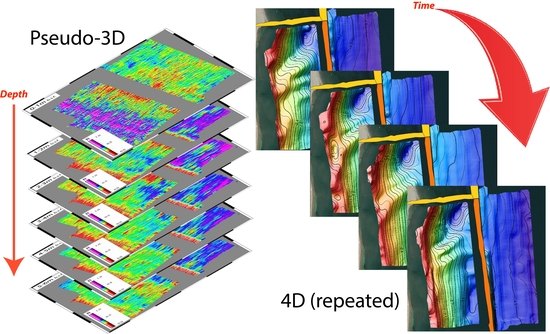
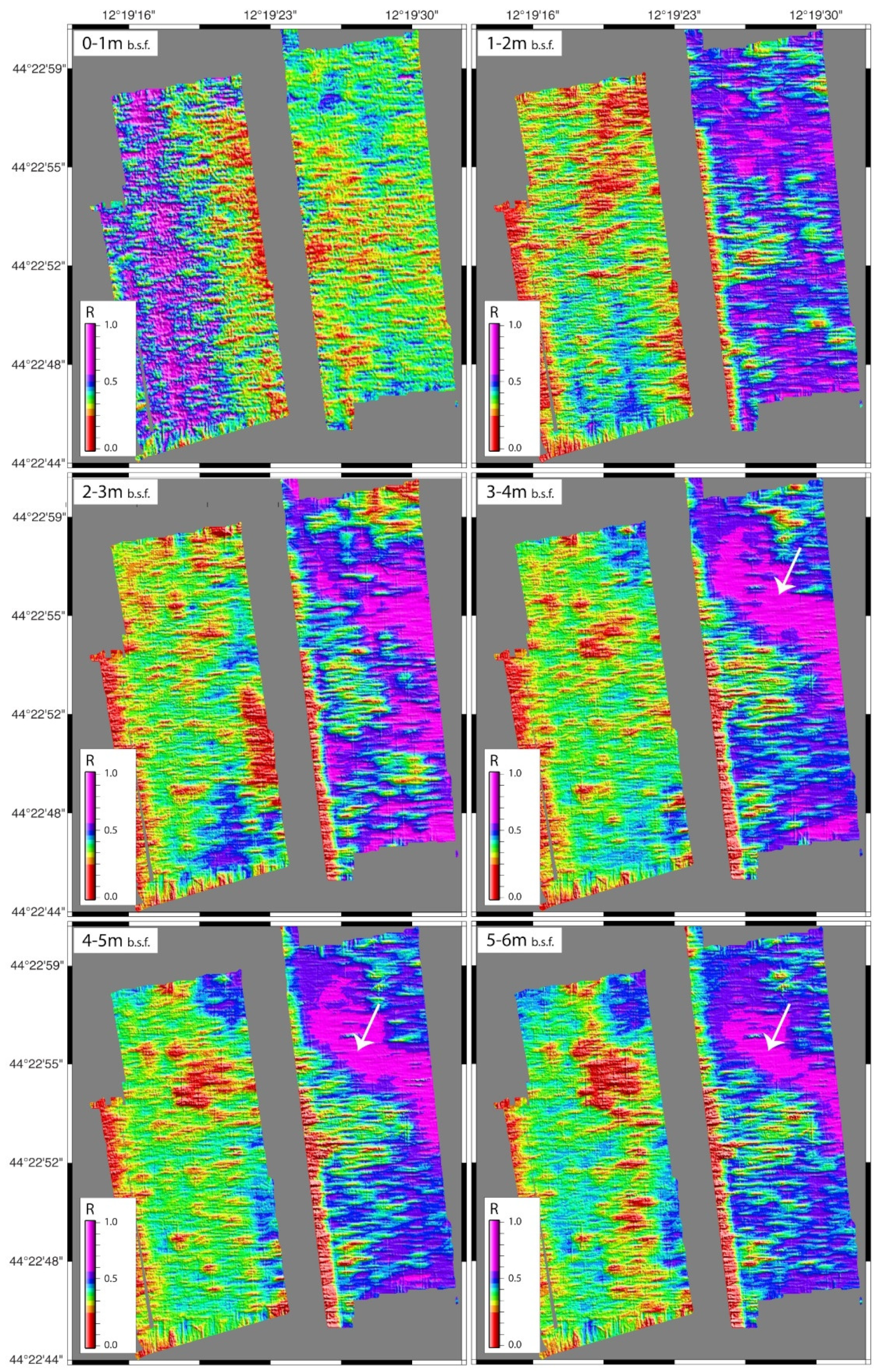
2.1.5. Flattening and Time Slicing
2.2. Seabed Sampling and Grain-Size Analysis
2.3. Hydrodynamic Modeling
3. Results
3.1. Morphobathymetry
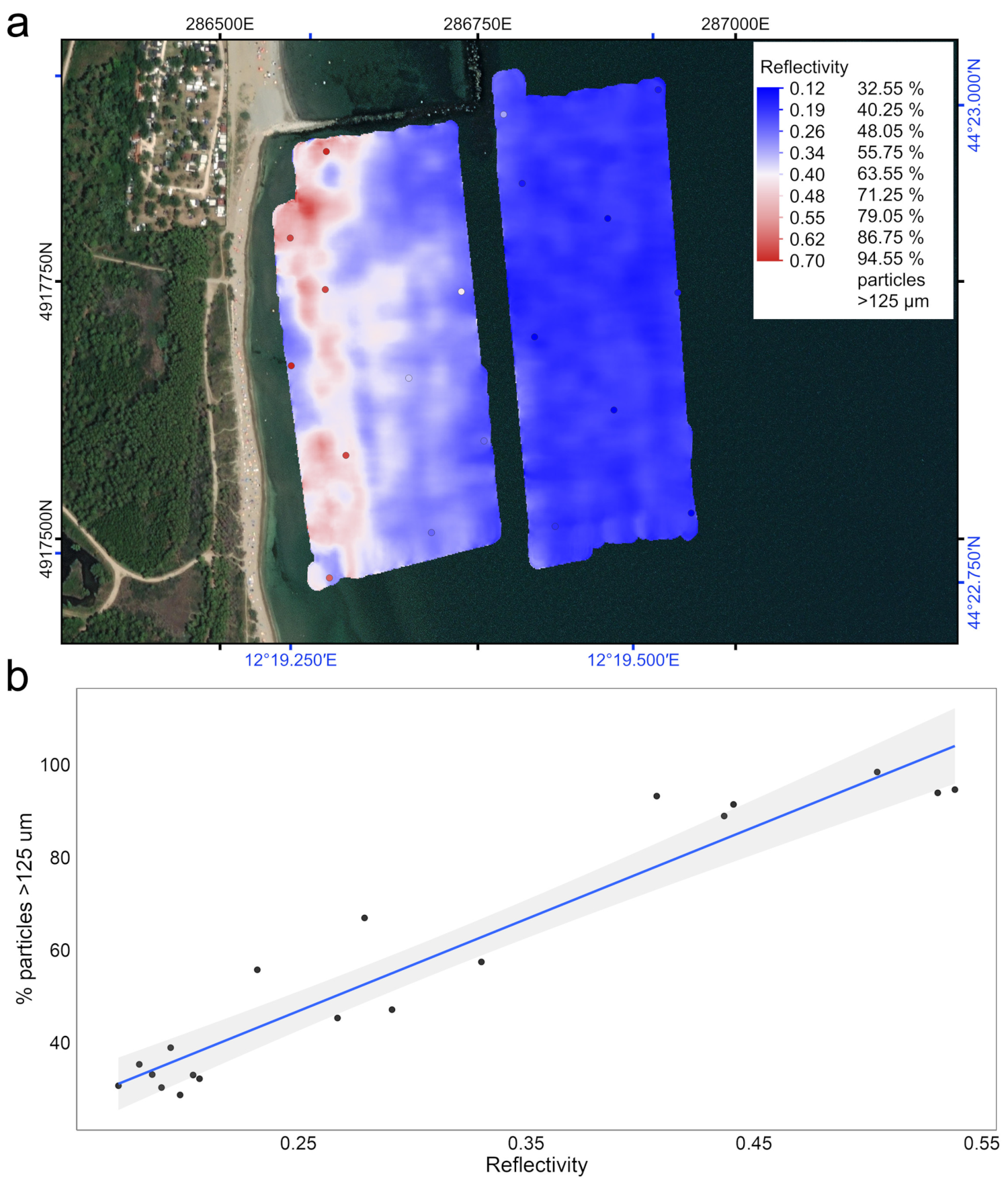
3.2. Sediment Grain Size and Reflectivity
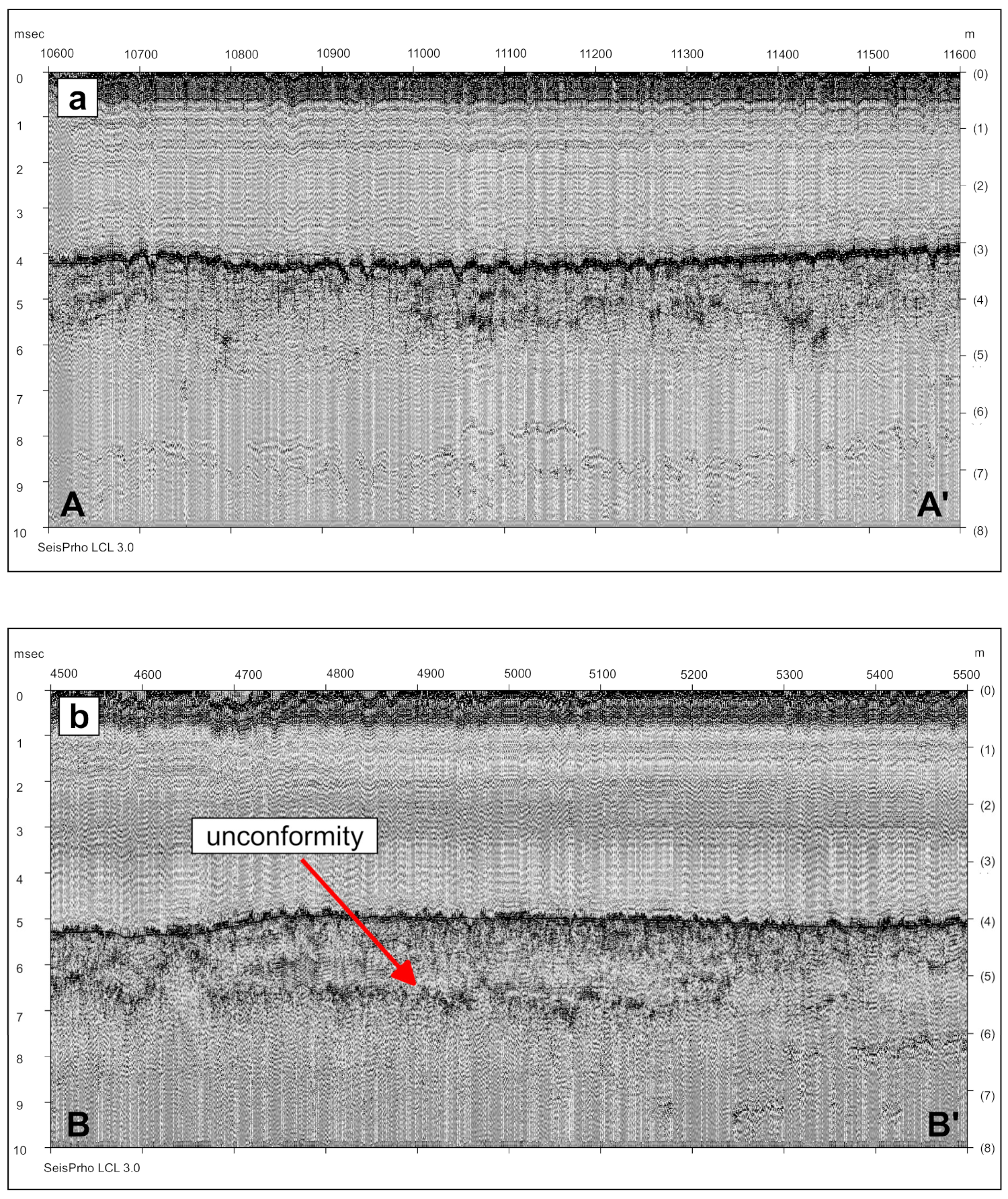
3.3. Stratigraphy
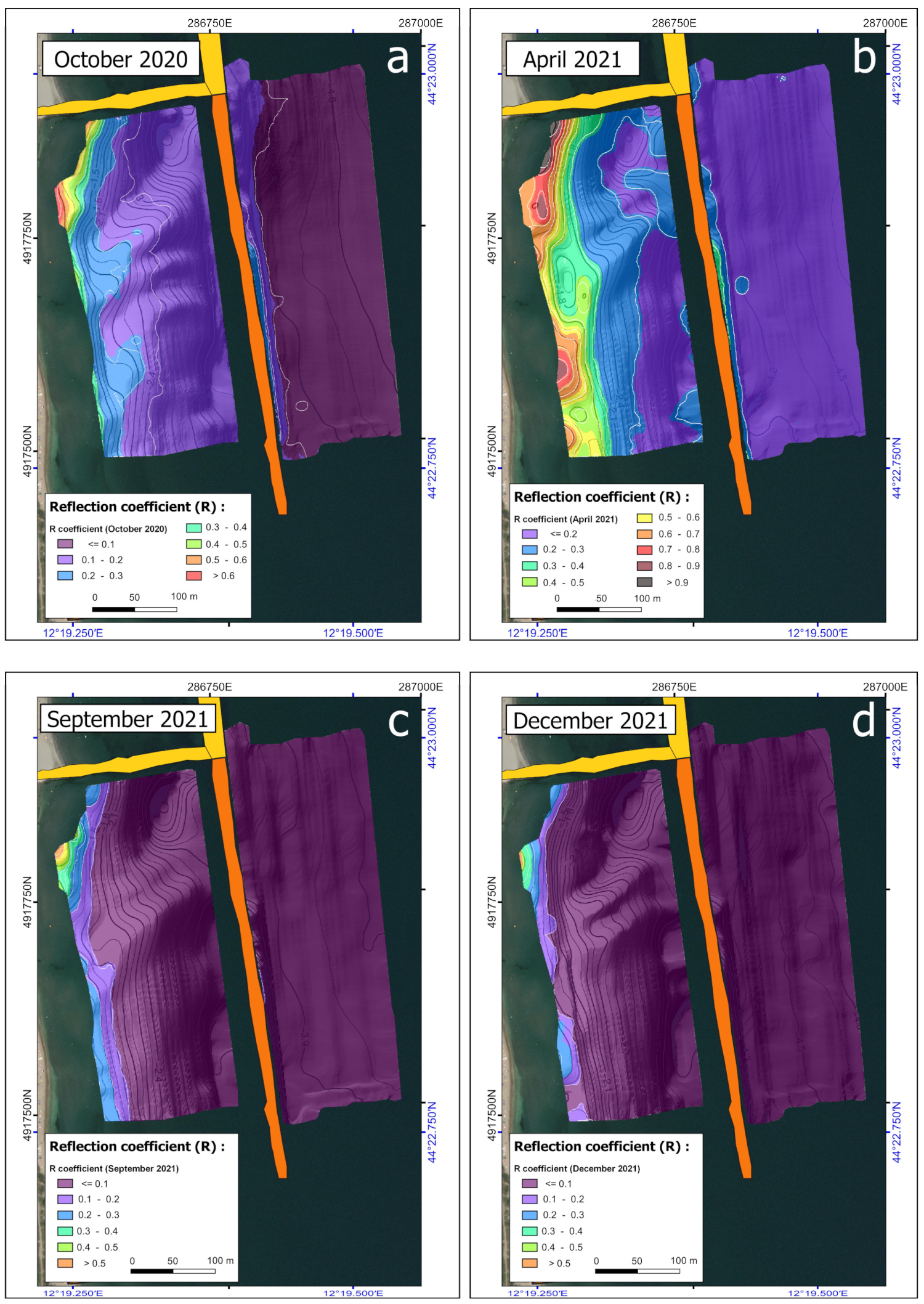
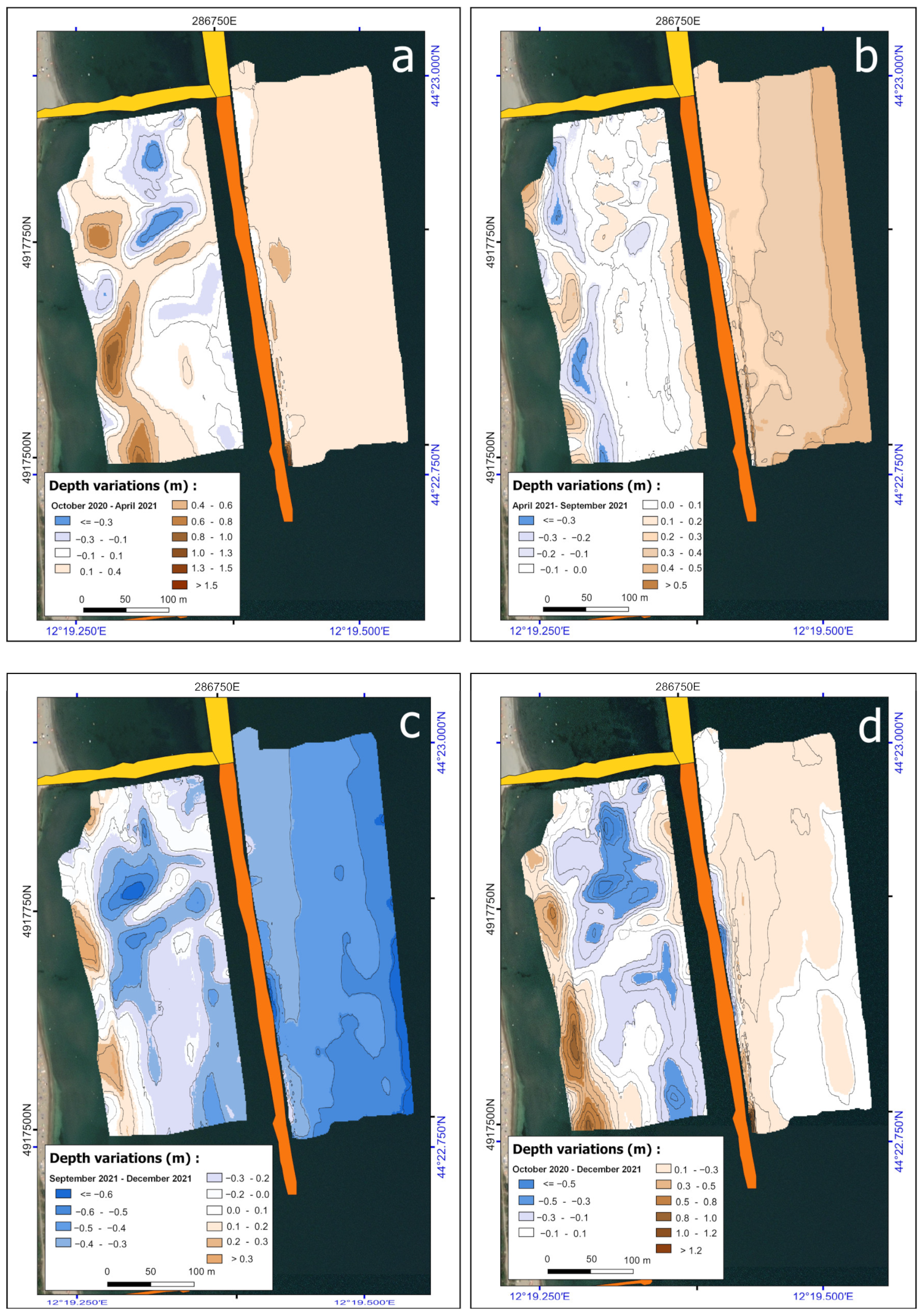
3.4. Bathy-Morphological Snapshots
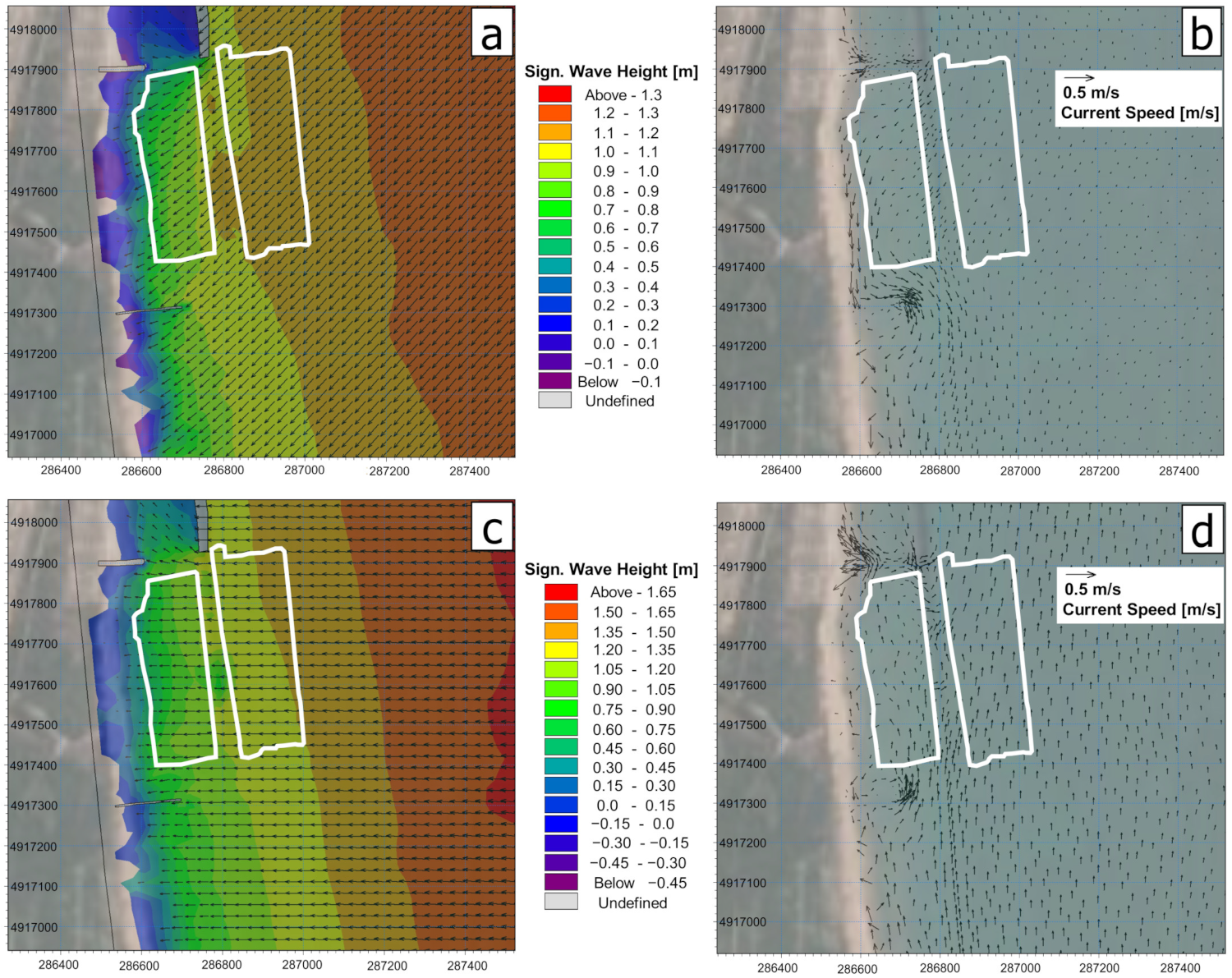
3.5. Wave Hydrodynamic Modeling
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bonetti, J.; Del Bianco, F.; Schippa, L.; Polonia, A.; Stanghellini, G.; Cenni, N.; Draghetti, S.; Marabini, F.; Gasperini, L. Anatomy of Anthropically Controlled Natural Lagoons through Geophysical, Geological, and Remote Sensing Observations: The Valli Di Comacchio (NE Italy) Case Study. Remote Sens. 2022, 14, 987. [Google Scholar] [CrossRef]
- Hodúl, M.; Bird, S.; Knudby, A.; Chénier, R. Satellite derived photogrammetric bathymetry. ISPRS J. Photogramm. Remote Sens. 2018, 142, 268–277. [Google Scholar] [CrossRef]
- Van Rijn, L. Coastal erosion and control. Ocean Coast. Manag. 2011, 54, 867–887. [Google Scholar] [CrossRef]
- Bio, A.; Bastos, L.; Granja, H.; Pinho, J.; Gonçalves, J.; Henriques, R.; Madeira, S.; Magalhães, A.; Rodrigues, D. Methods for coastal monitoring and erosion risk assessment: Two Portuguese case studies. Rev. de Gestão Costeira Integr. 2015, 15, 47–63. [Google Scholar] [CrossRef]
- Makar, A.; Specht, C.; Specht, M.; Dąbrowski, P.; Burdziakowski, P.; Lewicka, O. Seabed Topography Changes in the Sopot Pier Zone in 2010–2018 Influenced by Tombolo Phenomenon. Sensors 2020, 20, 6061. [Google Scholar] [CrossRef]
- Carlson, D.F.; Fürsterling, A.; Vesterled, L.; Skovby, M.; Pedersen, S.S.; Melvad, C.; Rysgaard, S. An affordable and portable autonomous surface vehicle with obstacle avoidance for coastal ocean monitoring. HardwareX 2019, 5, e00059. [Google Scholar] [CrossRef]
- Quaderni di Arpa, I.; Preti, M.; De Nigris, N.; Morelli, M.; Monti, M.; Bonsignore, F.; Aguzzi, M. (Eds.) Arpa. Stato del Litorale Emiliano-Romagnolo All’anno 2007 e Piano Decennale di Gestione; Arpa Emilia Romagna: Bologna, Italy, 2009; p. 270. ISBN 88-87854-21-1. [Google Scholar]
- Aguzzi, M.; Bonsignore, F.; De Nigris, N.; Morelli, M.; Paccagnella, T.; Romagnoli, C.; Unguendoli, S.; I quaderni di Arpae. Arpae. Stato del Litorale Emiliano-Romagnolo al 2012; Erosione e interventi di difesa; Arpae Emilia-Romagna Ed.: Bologna, Italy, 2016; p. 227. ISBN 978-88-87854-41-1. [Google Scholar]
- Quaderni di Arpae, I.; Aguzzi, M.; Costantino, R.; De Nigris, N.; Morelli, M.; Romagnoli, C.; Unguendoli, S.; Vecchi, E. (Eds.) Arpae. Stato del Litorale Emiliano-Romagnolo al 2018; Erosione e interventi di difesa; Arpae Emilia Romagna: Bologna, Italy, 2020; p. 224. ISBN 978-88-87854-48-0. Available online: https://www.arpae.it/it/notizie/slem-2018.pdf (accessed on 20 February 2021).
- Teatini, P.; Ferronato, M.; Gambolati, G.; Gonella, M. Groundwater pumping and land subsidence in the Emilia-Romagna coastland, Italy: Modeling the past occurrence and the future trend. Water Resour. Res. 2006, 42, W01406. [Google Scholar] [CrossRef]
- Lamberti, A.; Zanuttigh, B. An integrated approach to beach management in Lido di Dante, Italy. Estuar. Coast. Shelf Sci. 2005, 62, 441–451. [Google Scholar] [CrossRef]
- Armaroli, C.; Ciavola, P. Dynamics of a nearshore bar system in the northern Adriatic: A video-based morphological classi-fication. Geomorphology 2011, 126, 201–216. [Google Scholar] [CrossRef]
- Archetti, R. Quantifying the Evolution of a Beach Protected by Low Crested Structures Using Video Monitoring. J. Coast. Res. 2009, 254, 884–899. [Google Scholar] [CrossRef]
- Archetti, R.; Romagnoli, C. Analysis of the effects of different storm events on shoreline dynamics of an artificially embayed beach. Earth Surf. Process. Landf. 2011, 36, 1449–1463. [Google Scholar] [CrossRef]
- Archetti, R.; Lamberti, A.; Smith, J.M. Storm-Driven Shore Changes of a Beach Protected by a Low Crested Structure. In Coastal Engineering; World Scientific: Singapore, 2009; pp. 1977–1989. [Google Scholar] [CrossRef]
- Ciavola, P.; Armaroli, C.; Chiggiato, J.; Valentini, A.; Deserti, M.; Perini, L.; Luciani, P.; Silvani, V. Impact of storms along the coastline of Emilia-Romagna: The morphological signature on the Ravenna coastline (Italy). J. Coast. Res. 2007, 540–544. Available online: http://www.jstor.org/stable/26481647 (accessed on 15 April 2021).
- Preti, M. Ripascimento Delle Spiagge con Sabbie Sottomarine in Emilia-Romagna: Monitoraggio 2001–2009; Studi costieri N.19 2011; Arpae Emilia-Romagna Ed.: Bologna, Italy, 2011; p. 2016. [Google Scholar]
- Stanghellini, G.; Del Bianco, F.; Gasperini, L. OpenSWAP, an Open Architecture, Low Cost Class of Autonomous Surface Vehicles for Geophysical Surveys in the Shallow Water Environment. Remote Sens. 2020, 12, 2575. [Google Scholar] [CrossRef]
- Gasperini, L. Extremely Shallow-water Morphobathymetric Surveys: The Valle Fattibello (Comacchio, Italy) Test Case. Mar. Geophys. Res. 2005, 26, 97–107. [Google Scholar] [CrossRef]
- Ligi, M.; Bortoluzzi, G.; Giglio, F.; Del Bianco, F.; Ferrante, V.; Gasperini, L.; Ravaioli, M. Shallow water acoustic techniques to investigate transitional environments: A case study over Boka Kotorska bay. Measurement 2018, 126, 382–391. [Google Scholar] [CrossRef]
- Gasperini, L.; Ligi, M.; Stanghellini, G. Pseudo-3D techniques for analysis and interpretation of high-resolution marine seismic reflection data. Boll. Geofis. Teor. Appl. 2021, 62, 599–614. [Google Scholar]
- Gasperini, L.; Stanghellini, G. SeisPrho: An interactive computer program for processing and interpretation of high-resolution seismic reflection profiles. Comput. Geosci. 2009, 35, 1497–1507. [Google Scholar] [CrossRef]
- Wessel, P.; Smith, W.H.F.; Scharroo, R.; Luis, J.; Wobbe, F. Generic Mapping Tools: Improved Version Released. EOS Trans. Am. Geophys. Union 2013, 94, 409–410. [Google Scholar] [CrossRef]
- Stanghellini, G.; Carrara, G. Segy-change: The swiss army knife for the SEG-Y files. SoftwareX 2017, 6, 42–47. [Google Scholar] [CrossRef]
- Gasperini, L.; Marzocchi, A.; Mazza, S.; Miele, R.; Meli, M.; Najjar, H.; Michetti, A.M.; Polonia, A. Morphotectonics and late Quaternary seismic stratigraphy of Lake Garda (Northern Italy). Geomorphology 2020, 371, 107427. [Google Scholar] [CrossRef]
- Gasperini, L.; Peteet, D.; Bonatti, E.; Gambini, E.; Polonia, A.; Nichols, J.; Heusser, L. Late Glacial and Holocene environmental variability, Lago Trasimeno, Italy. Quat. Int. 2021, 622, 21–35. [Google Scholar] [CrossRef]
- Blott, S.J.; Pye, K. GRADISTAT: A grain size distribution and statistics package for the analysis of unconsolidated sediments. Earth Surf. Process. Landf. 2001, 26, 1237–1248. [Google Scholar] [CrossRef]
- Friedman, G.M.; Sanders, J.E. Principles of Sedimentology; Wiley: New York, NY, USA, 1978. [Google Scholar]
- Zhang, H.; Lu, L.; Liu, Y.; Liu, W. Spatial Sampling Strategies for the Effect of Interpolation Accuracy. Int. J. Geo-Inf. 2015, 4, 2742–2768. [Google Scholar] [CrossRef]
- QGIS Development Team. QGIS Geographic Information System Version 3.16.5 LTR. 2021. Available online: http://qgis.osgeo.org (accessed on 1 March 2021).
- Richardson, M.D.; Briggs, K.B. In situ and laboratory geoacoustic measurements in soft mud and hard-packed sand sediments: Implications for high-frequency acoustic propagation and scattering. Geo-Mar. Lett. 1996, 16, 196–203. [Google Scholar] [CrossRef]
- Shumway, G. Sound Speed and Absorption Studies of Marine Sediments by a Resonance Method. Geophysics 1960, 25, 451–467. [Google Scholar] [CrossRef]
- McCann, C.; McCann, D.M. The Attenuation of Compressional Waves in Marine Sediments. Geophysics 1969, 34, 882–892. [Google Scholar] [CrossRef]
- McCann, C.; McCann, D.M. A theory of compressional wave attenuation in non-cohesive sediments. Geophysics 1985, 50, 1311–1317. [Google Scholar] [CrossRef]
- Dunlop, J.I. Measurement of acoustic attenuation in marine sediments by impedance tube. J. Acoust. Soc. Am. 1992, 91, 460–469. [Google Scholar] [CrossRef]
- Zanuttigh, P.; Brusco, N.; Taubman, D.; Cortelazzo, G. A novel framework for the interactive transmission of 3D scenes. Signal Process. Image Commun. 2006, 21, 787–811. [Google Scholar] [CrossRef]
- Folk, R.L.; Ward, W.C. Brazos river bar: A Study in the Significance of Grain-Size Parameters. J. Sediment. Res. 1957, 27, 3–26. [Google Scholar] [CrossRef]
- MATTM-Regioni. Linee Guida Nazionali per la Difesa Della Costa dai Fenomeni di Erosione e Dagli Effetti dei Cambiamenti Climatici. 2018, p. 305. Available online: http://www.erosionecostiera.isprambiente.it/files/linee-guida-nazionali/TNEC_LineeGuidaerosionecostiera_2018.pdf (accessed on 1 March 2021).
- Romagnoli, C.; Sistilli, F.; Cantelli, L.; Aguzzi, M.; De Nigris, N.; Morelli, M.; Gaeta, M.G.; Archetti, R. Beach Monitoring and Morphological Response in the Presence of Coastal Defense Strategies at Riccione (Italy). J. Mar. Sci. Eng. 2021, 9, 851. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey Number | Date | Data Collected |
|---|---|---|
| 1 | 14 October 2020 |
|
| 2 | 20 April 2021 |
|
| 3 | 24 September 2021 |
|
| 4 | 13 December 2021 |
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stanghellini, G.; Bidini, C.; Romagnoli, C.; Archetti, R.; Ponti, M.; Turicchia, E.; Del Bianco, F.; Mercorella, A.; Polonia, A.; Giorgetti, G.; et al. Repeated (4D) Marine Geophysical Surveys as a Tool for Studying the Coastal Environment and Ground-Truthing Remote-Sensing Observations and Modeling. Remote Sens. 2022, 14, 5901. https://doi.org/10.3390/rs14225901
Stanghellini G, Bidini C, Romagnoli C, Archetti R, Ponti M, Turicchia E, Del Bianco F, Mercorella A, Polonia A, Giorgetti G, et al. Repeated (4D) Marine Geophysical Surveys as a Tool for Studying the Coastal Environment and Ground-Truthing Remote-Sensing Observations and Modeling. Remote Sensing. 2022; 14(22):5901. https://doi.org/10.3390/rs14225901
Chicago/Turabian StyleStanghellini, Giuseppe, Camilla Bidini, Claudia Romagnoli, Renata Archetti, Massimo Ponti, Eva Turicchia, Fabrizio Del Bianco, Alessandra Mercorella, Alina Polonia, Giulia Giorgetti, and et al. 2022. "Repeated (4D) Marine Geophysical Surveys as a Tool for Studying the Coastal Environment and Ground-Truthing Remote-Sensing Observations and Modeling" Remote Sensing 14, no. 22: 5901. https://doi.org/10.3390/rs14225901
APA StyleStanghellini, G., Bidini, C., Romagnoli, C., Archetti, R., Ponti, M., Turicchia, E., Del Bianco, F., Mercorella, A., Polonia, A., Giorgetti, G., Gallerani, A., & Gasperini, L. (2022). Repeated (4D) Marine Geophysical Surveys as a Tool for Studying the Coastal Environment and Ground-Truthing Remote-Sensing Observations and Modeling. Remote Sensing, 14(22), 5901. https://doi.org/10.3390/rs14225901