1. Introduction
As part of human exploration of the Moon, a wide variety of commercial and international missions have been undertaken to send robotic landers and rovers to the surface of the Moon [
1]. To support the growing number of ongoing and scheduled robotic activities and improve their autonomous operation capabilities, future lunar missions will require reliable infrastructure to provide navigation and communication services to the explorers on the Moon. For this purpose, robotic rovers will be used for resource mapping and scientific observation missions on the lunar surface. Earlier studies have reported that a positioning accuracy of less than 100 m is required to support these goals [
2].
There are several ongoing feasibility studies on dedicated lunar orbiting satellite constellations like the Global Navigation Satellite System (GNSS) around the Earth [
3,
4,
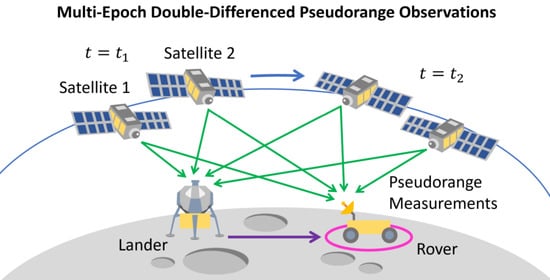
5]. While they can provide robust and precise navigation services to the entire Moon’s surface and its proximity, the transportation cost to inject many satellites into multiple lunar orbits is not affordable at the early stage of lunar exploration programs. To reduce the initial deployment cost of the lunar navigation satellite constellations, the authors proposed a new dual-satellite navigation method called multi-epoch double-differenced pseudorange observation (MDPO), which requires range observations from only two navigation satellites in a single orbit plane [
6]. Furthermore, it is still quite challenging for lunar orbiting satellites to achieve reasonable orbit and clock determination as well as prediction accuracies, especially for a small satellite with its limited size, weight, and power. The MDPO algorithm efficiently eliminates these error sources by taking a double-differenced measurement between a lander and a rover.
Although there are several operational limitations in availability and real-time property, MDPO can handle the typical pseudorange observables provided by the satellites in the future full constellation. Since there is no special treatment required for the first two navigation satellites, it is quite suitable for a temporal precursor mission by the completion of the full constellation. More details about the MDPO algorithm and comprehensive numerical analysis results can be found in the early work [
7].
In this study, to evaluate the performance of the MDPO algorithm with real pseudorange observations, we applied it to GNSS pseudorange measurements obtained from a pair of GNSS ground stations emulating a lander and a rover on the lunar surface. Since the resulting positioning accuracy varied largely by satellite geometry, the consistency of the navigation performance was evaluated by the estimated measurement errors of the double-differenced pseudorange observations.
2. MDPO Positioning Method
In this section, we provide a brief description of the MDPO algorithm and its requirements. First, it is a relative positioning method and requires a pair of receivers, one of which will be on the lander as a base station and the other on the rover. The position of the lander must be determined before rover deployment by other means. For example, the Lunar Reconnaissance Orbiter Camera (LROC) successfully identified the location of the Chinese Chang’e 5 lunar lander with an accuracy of 20 m [
8].
At a time of
, each receiver provides pseudorange measurements expressed by the following equation:
where the subscript
and the superscript
represent the receiver and one of the tracking satellites, respectively,
is the speed of light,
is the receiver clock bias,
is the satellite clock bias including the range offset due to the satellite position error, and
represents the pseudorange noise. The true range between the receiver and the satellite can be defined as:
where
is the receiver position vector at the time of
, and
is the satellite position vector at the corresponding signal transmission time of
.
Now, we assume two navigation satellites,
, which are commonly visible from both the lander (
) and the rover (
). Then, we have the following four pseudorange observations at each epoch
:
For typical GNSS pseudorange observations, the magnitude of
is reasonably small, and it is treated as a known parameter provided in the broadcast navigation message. For the lunar orbiting satellites, however, it is challenging to obtain reasonable orbit and clock determination and prediction accuracies especially for a small satellite. For example, the expected orbit determination accuracy of EQUULEUS, a 6U-size CubeSat to be launched to an Earth-Moon L2 quasi-Halo orbit, was reported about a kilometer by using range and range rate observations obtained on two ground stations [
9]. It is three orders of magnitude larger than a typical GPS ephemeris error, which is usually in the order of a meter.
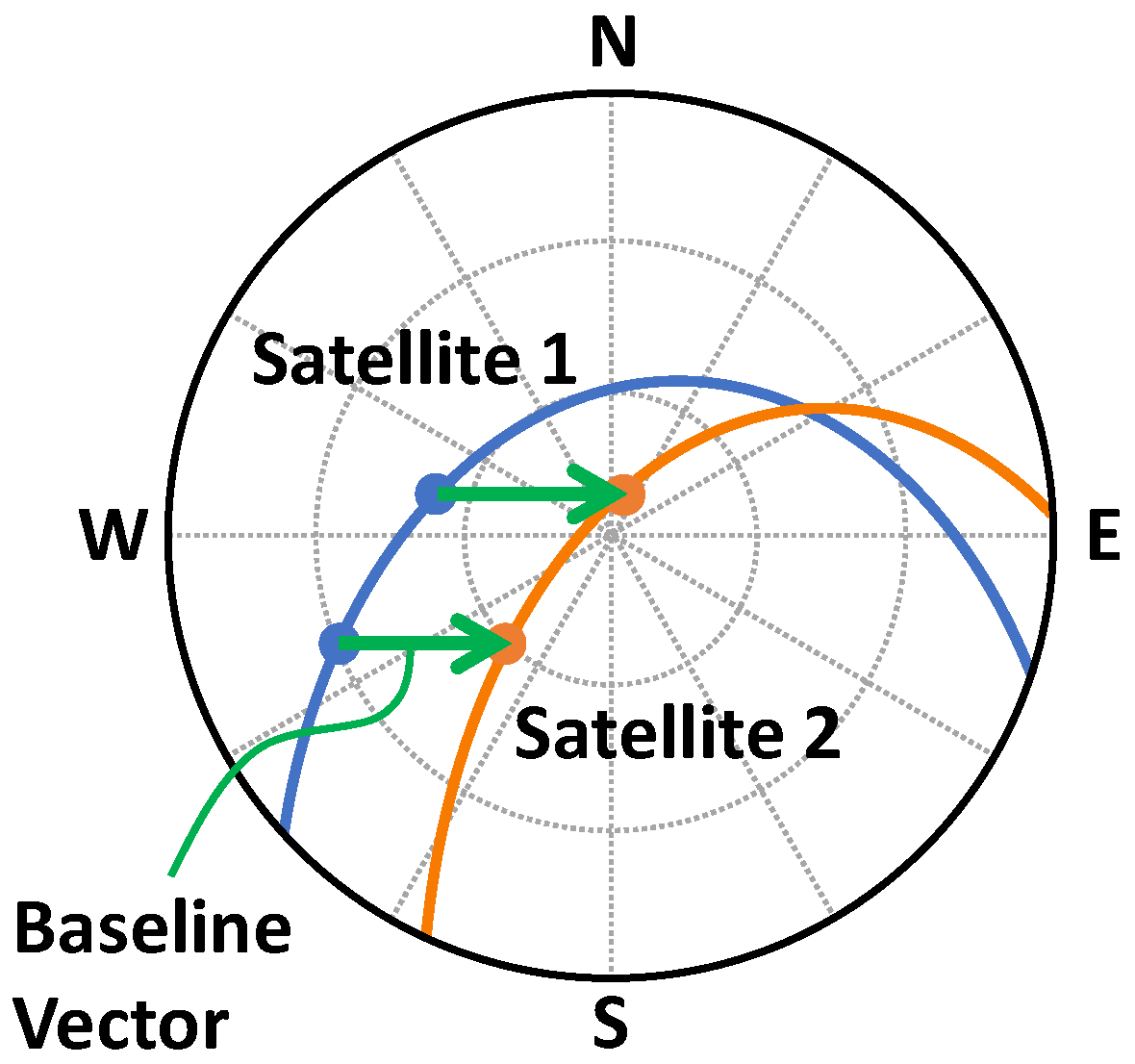
Fortunately, these errors can be virtually eliminated by combining the simultaneous observations from the receivers. Since the two receivers are both observing the same satellite at the same time, the difference in the satellite clock bias errors between the receivers is obviously zero. Moreover, if the baseline between the two receivers is shorter than the distance to a satellite by orders of magnitude, the range bias due to the satellite position error is also the same between the receivers. In addition, since each receiver is observing two satellites simultaneously, the receiver clock error
can also be eliminated by differencing the pseudorange measurement of one satellite from that of the other. Finally, when the two types of differences are combined, the result is known as a double-differenced measurement. From Equations (3)–(6), it could be written as:
where
denotes the double-difference operation. The resulting double-differenced pseudorange is composed of only the double-differenced true range and pseudorange noise. Although the noise is increased by the double-difference operation, both the receiver clock and the satellite-related bias errors are efficiently eliminated.
In order to eliminate the satellite and the receiver clock bias errors from the double-differenced measurements, time synchronization between the two receivers is essential. In the common GPS positioning, it can be achieved in the position calculation process by estimating the receiver clock bias at the same time. However, the receiver clock bias is removed in the double-differenced observation and cannot be estimated. Since the maximum range rate of the pseudorange observation obtained from a low lunar orbiting satellite is about 1.3 km/s, the resulting range error is no larger than 1.3 m if the time synchronization error is maintained under 1 ms. This could be achieved by the frame synchronization of the navigation signals transmitted from the lunar orbiting satellites or the communication link signal between the rover and the lander.
Since the baseline is much shorter than the distance to a satellite, the following relationship is obtained:
where
is the relative position vector between the two receivers, defined as the following:
and
is the unit direction vector from the base station receiver, which is the lander in this case, to the satellite. It is called the line-of-sight (LOS) vector and could be written as:
Since the lander location
is stationary and is assumed to be well known, the rover position
in Equation (9) can be written as the following:
where the relative position
is the only unknown vector composed of three unknown parameters.
Let us now consider the relative position estimation based on Equation (8). In order to estimate
, we need at least three linearly independent observations. With the two satellites in view, however, only one double-differenced pseudorange measurement is available at each epoch. To overcome this issue, we assume the rover position
is also stationary during multiple observation periods
, where
must be greater than or equal to the number of unknown parameters in
. Then the double-differenced pseudorange measurements from multiple observation periods can be written in vector-matrix notation as below:
This is the typical over-determination set of linear equations, and the relative position vector
can be estimated by the least-squares method. Equation (12) can be rewritten in general vector and matrix form as:
where
and
are the observation and the residual vectors, respectively, and
is called the geometric matrix. Then the least-squares solution
that minimizes the sum of squared residuals
can be obtained from:
In order to solve the relative position vector
in Equation (12), the rover must be stationary for at least three observation periods. Further reduction in the stationary periods can be achieved if the topocentric height of the rover is known. Equation (12) can be easily transformed into the local ENU (East-North-Up) coordinate frame by writing the LOS vector
as below:
where
and
are the azimuth and elevation angles of satellite
, respectively, as observed from the lander location. If the topocentric height of the rover can be pre-estimated using a lunar digital elevation model (DEM), the remaining two unknown parameters are the horizontal relative position vector of the rover. In this case, the minimum number of the stationary periods can be reduced to two.
It is obvious that the satellite position difference must be large enough between the two consecutive observation periods to avoid the singularity of the least-squares solution of Equation (14). Many early studies utilize an elliptical lunar frozen orbit (ELFO) that has an orbital period of 24 h [
10,
11]. It provides good south pole coverage, but the rover must remain stationary for a long time. On the other hand, the satellite motion is much faster in a low altitude orbit. The numerical simulation results in the early work showed that a set of double-differenced pseudorange measurements taken in a 30-s interval from the satellites in a 300 km altitude circular orbit could provide reasonable rover position estimation accuracies for the baseline length of up to a few kilometers [
6,
7].
5. Conclusions
In this study, we demonstrated the MDPO algorithm for the dual-satellite lunar navigation system with real GNSS pseudorange measurement obtained from GNSS stations on the ground. A pair of stations separated by about 5 km were selected to emulate a lander and a rover on the Moon.
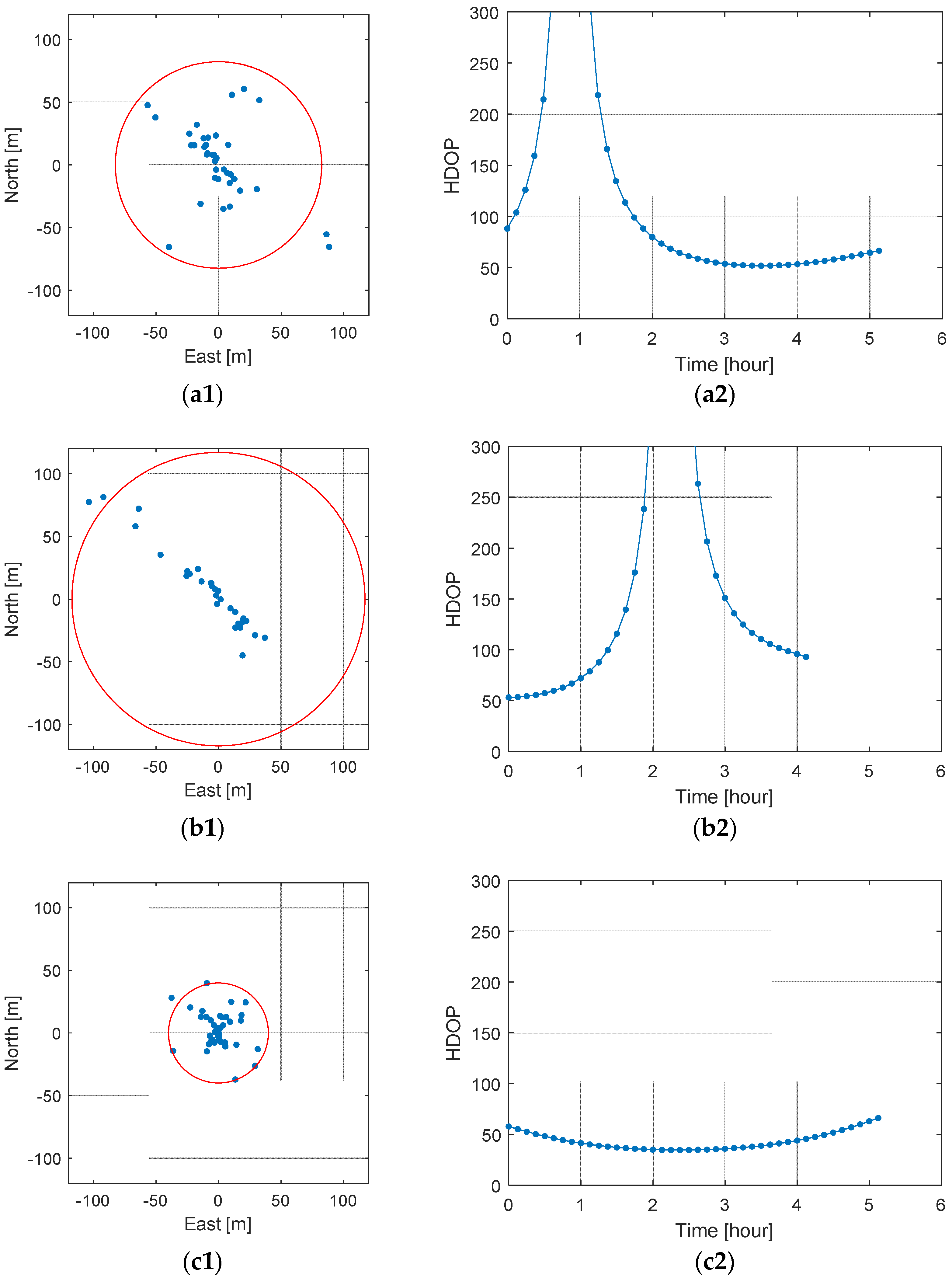
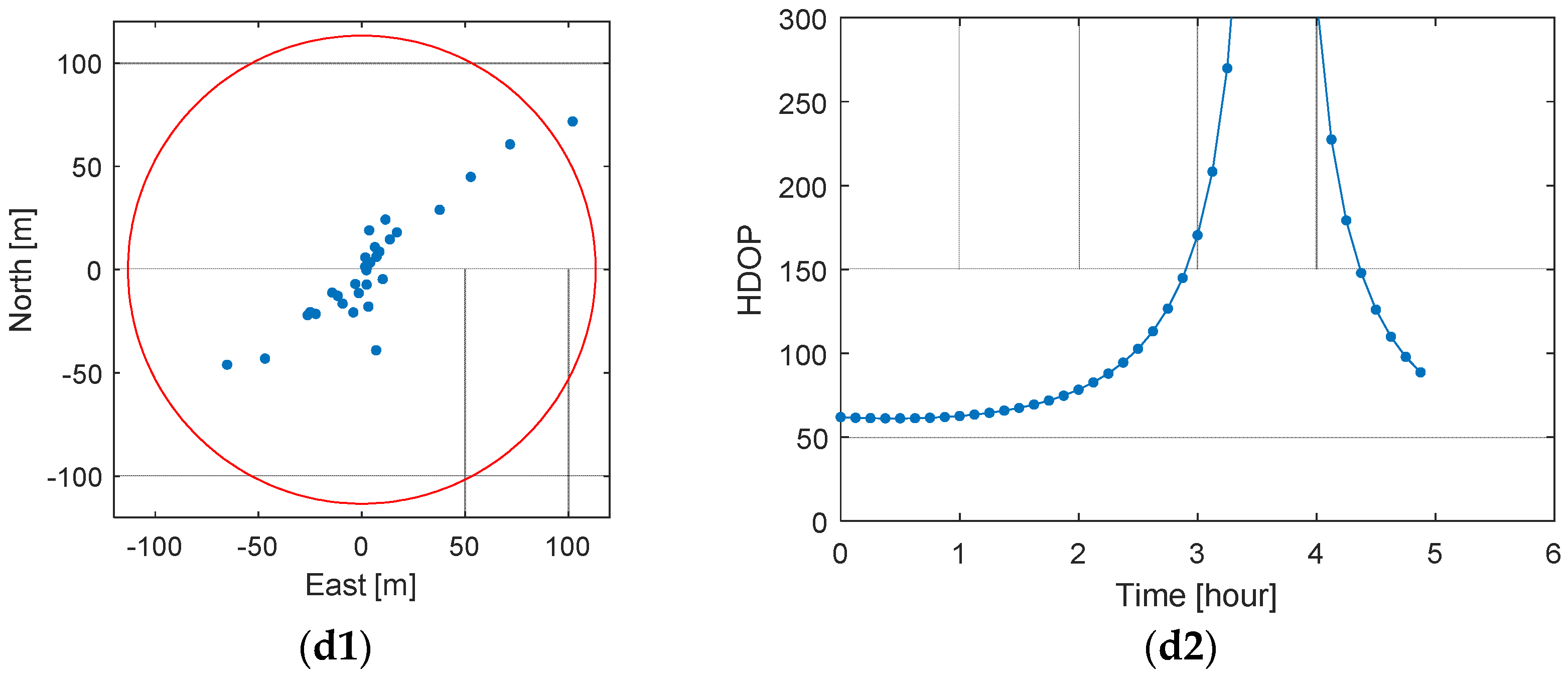
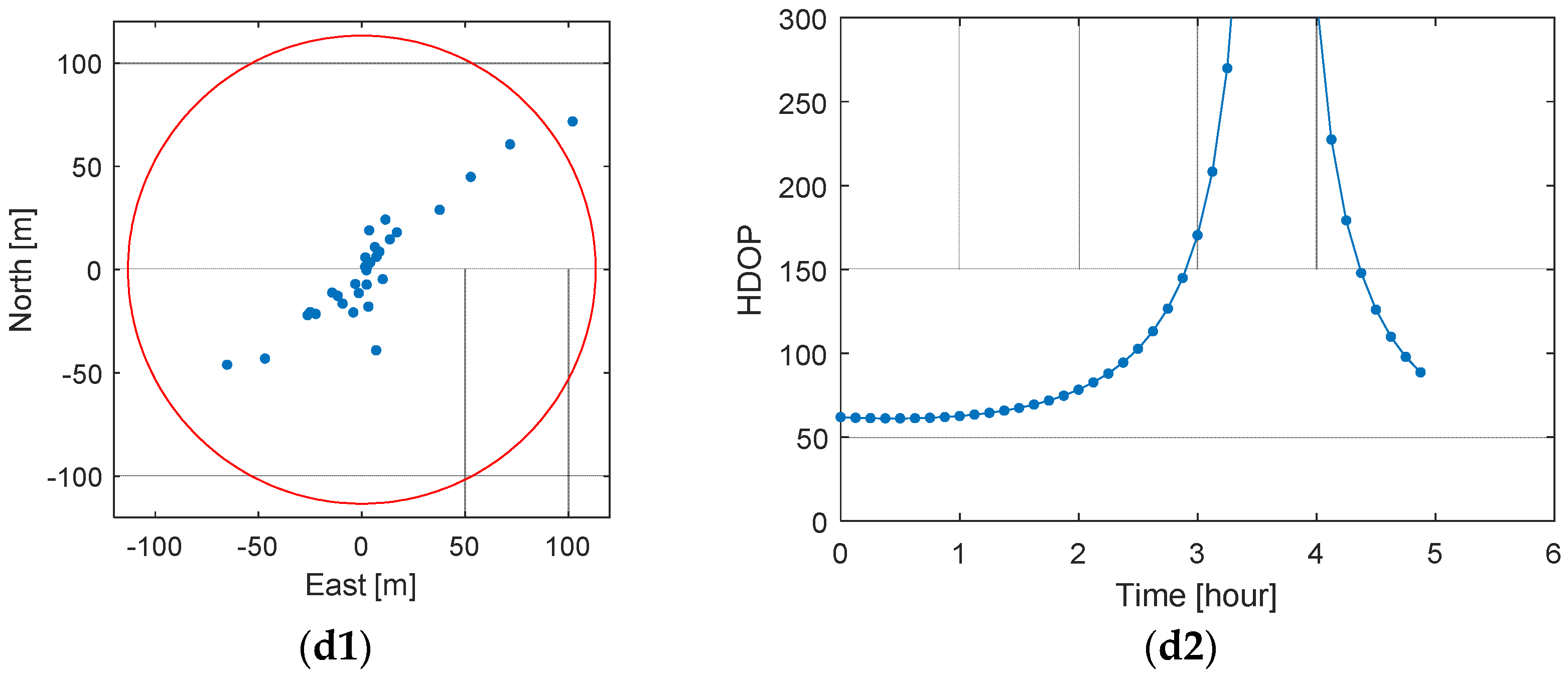
Prior to the MDPO demonstration, a double-differenced pseudorange error assessment was performed using all the visible GPS satellites. Major pseudorange errors, such as satellite and receiver clock offsets and ionospheric delay, can be effectively removed from the double-differenced observations and the remaining error would be basically the sum of pseudorange noises. Thus, the distribution of the relative position error depends entirely on the variance of the range error and the satellite geometry, and the (95%) error of the double-differenced pseudorange observations can be obtained from the 2drms on the horizontal position errors and the corresponding HDOP values. The result showed that the expected error of the double-differenced pseudorange observations was about 1 m.
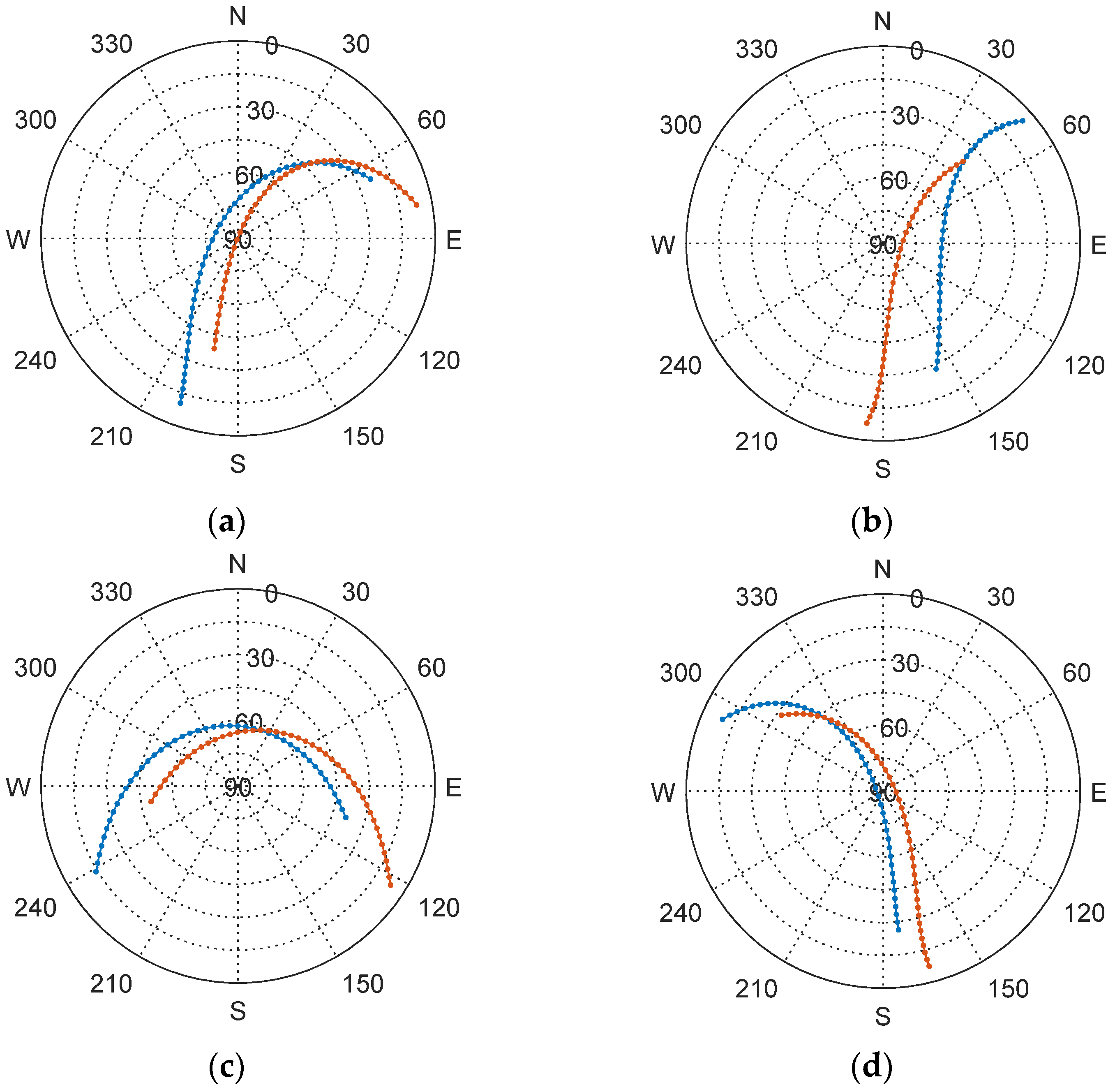
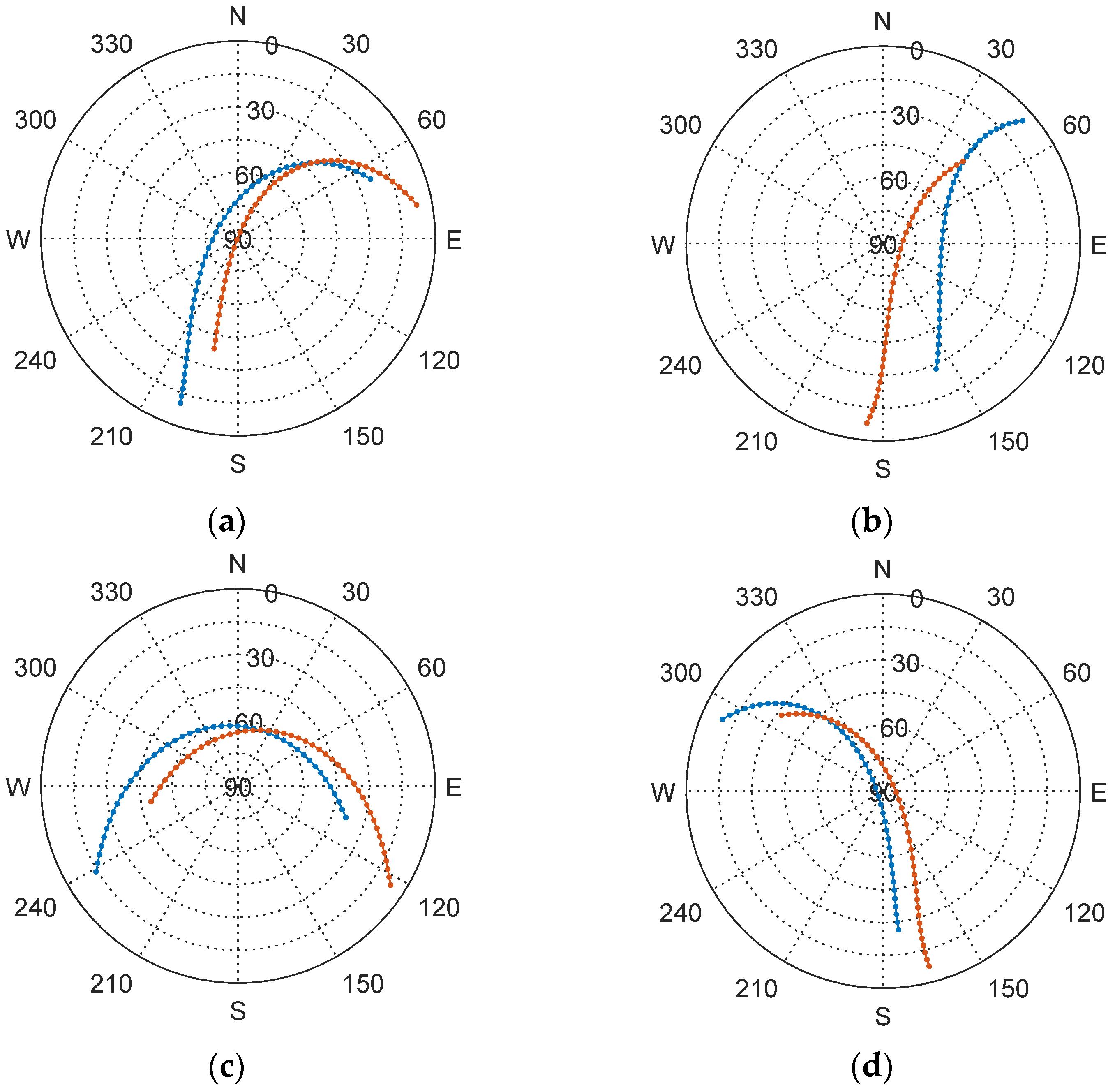
Next, we applied the MDPO algorithm using the same data set used in the double-differenced pseudorange error assessment. In this case, it was assumed that only two visible satellites were available at each epoch and four sets of satellite pairs were selected to emulate the satellite geometry resembling that of the previous lunar MDPO study. It was natural that the resulting horizontal positioning accuracies varied by satellite geometry, but the double-differenced pseudorange errors estimated from the 2drms of horizontal positioning errors and corresponding HDOP values were consistent and about 1 m. This agrees with the result of the previous double-differenced pseudorange error assessment, and it can be concluded that the MDPO algorithm worked properly with the real GPS observables and provided the expected performance.
Although the positioning accuracy of the MDPO algorithm tends to be lower because of its poor satellite geometry, it is still good enough for many lunar exploration activities. The MDPO algorithm is also suitable for the initial deployment stage of the lunar navigation satellite system because it only requires two satellites in view.
We are currently working on a design study of a lunar navigation satellite system using a pair of 6U-size CubeSats to demonstrate the MDPO algorithm on the Moon. More details of the satellite design will appear in our future article.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}