

3D LoD2 and LoD3 Modeling of Buildings with Ornamental Towers and Turrets Based on LiDAR Data




Abstract
:1. Introduction
2. Research Objective
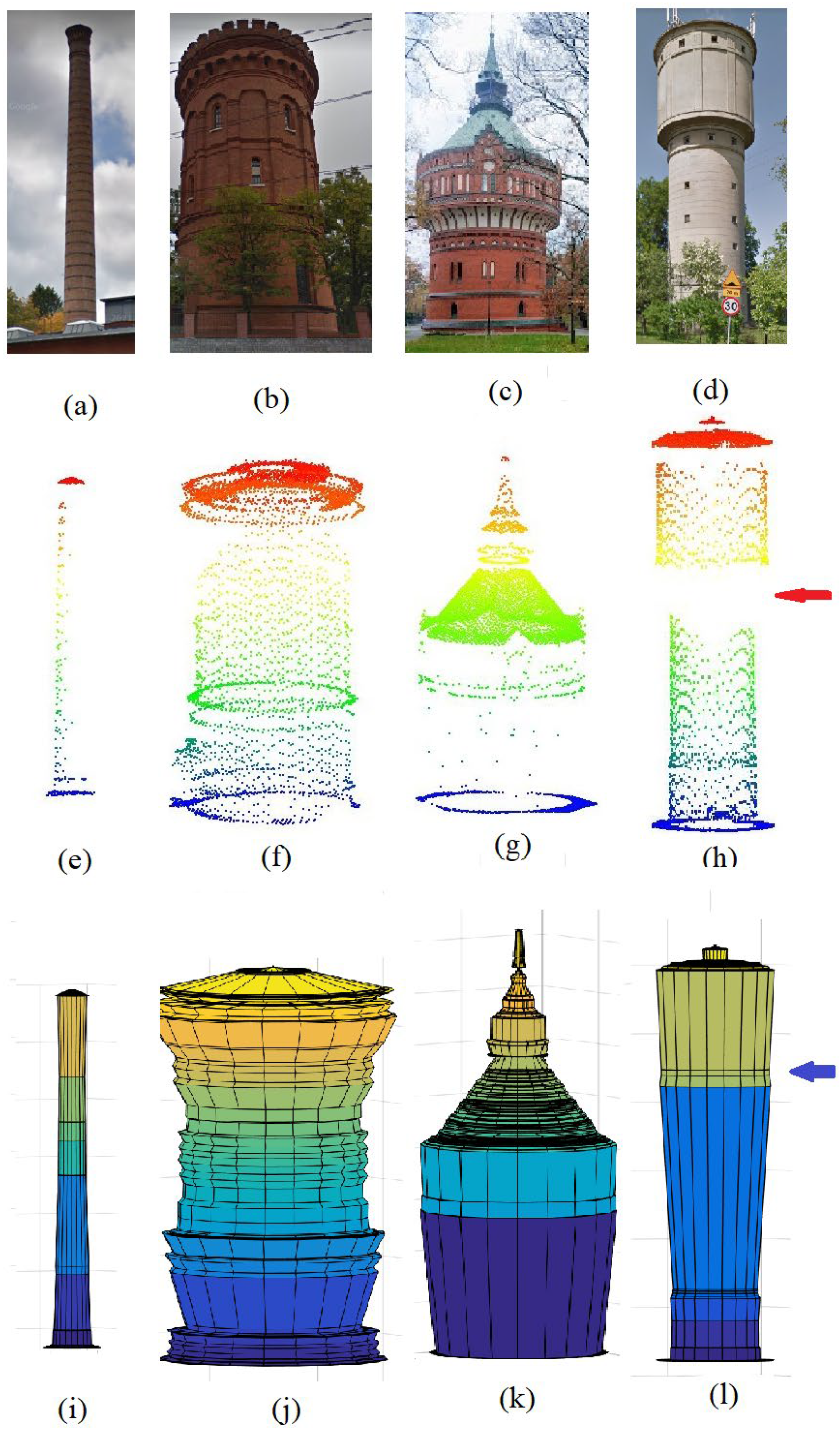
- Towers, turrets, and other ornamental structures require special modeling methods.
- Some of these structures can be modeled by rotating straight-line segments.
- New methods for the automatic generation of detailed building models are thus needed to ensure compliance with the CityGML 3.0 standard.
3. Design Concept
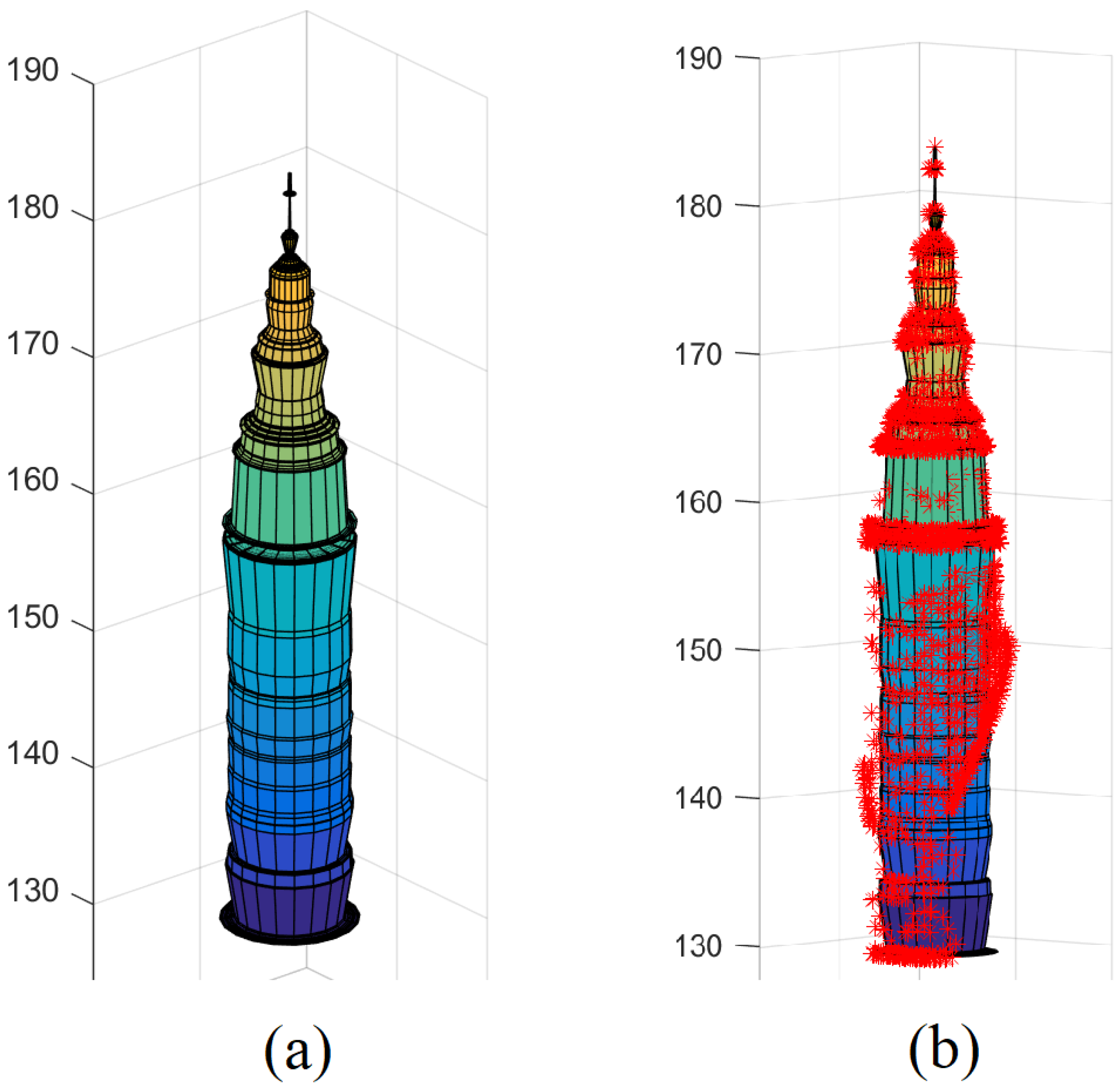
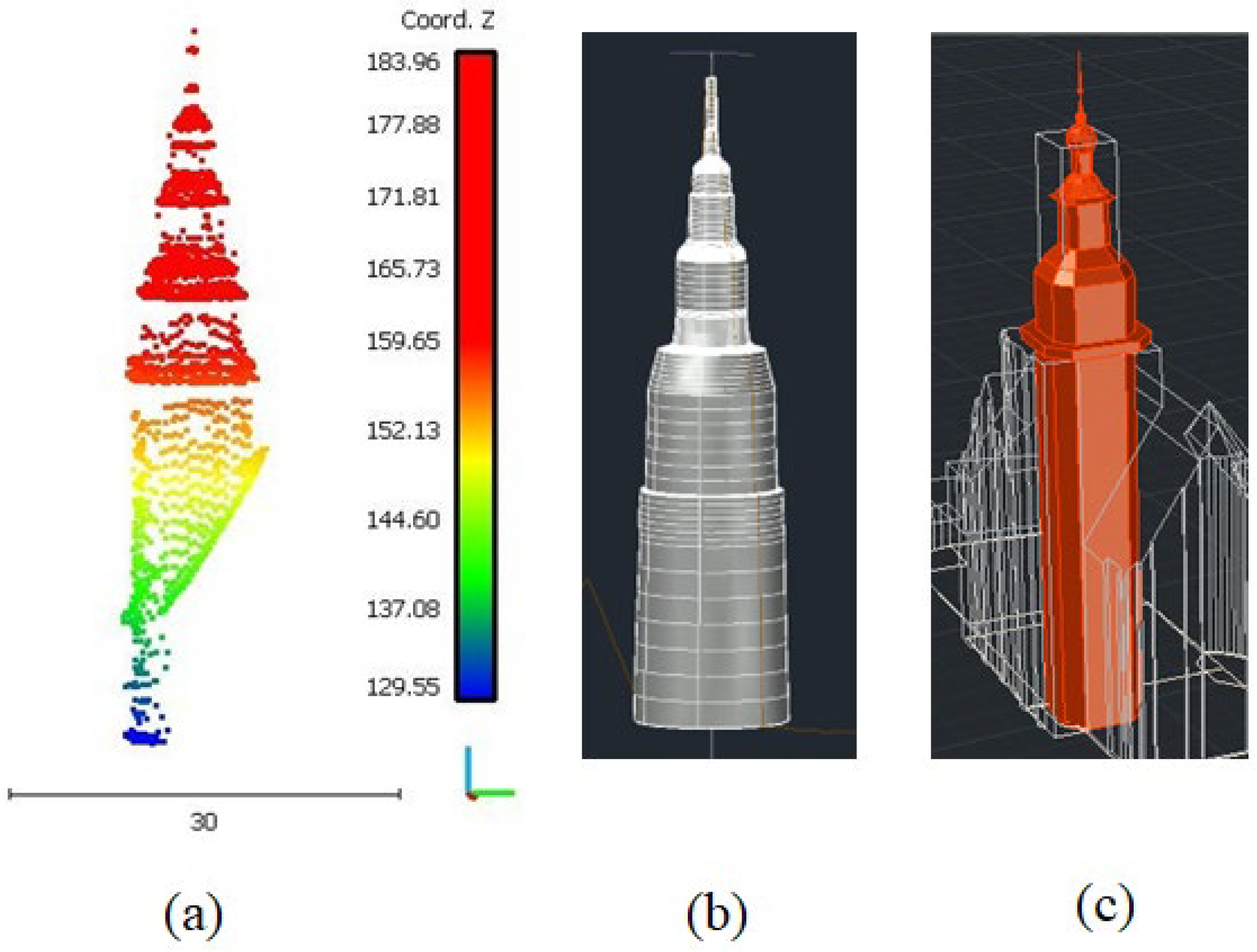
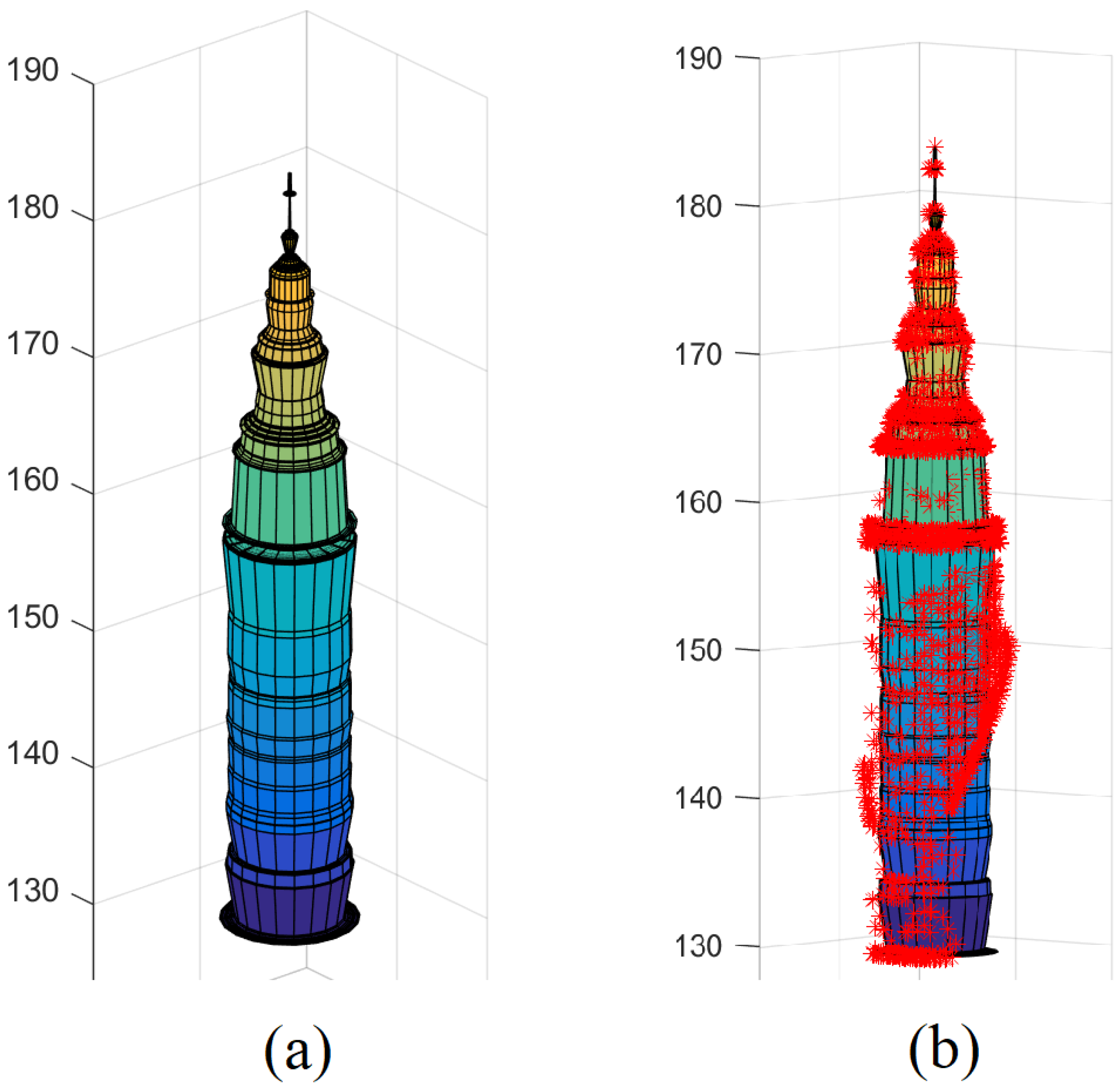
- Despite the fact that geometric details are not rendered with sufficient clarity in the point cloud, they can be identified in Model 2, but not in Model 1.
- Model 2 preserves the tower’s geometric form, which can be observed in the terrestrial image.
- Some errors in the diameters of different parts of the tower body in Model 2 result from a greater focus on the image than the point cloud.
- Model 1 renders the geometric form of different tower parts with lower accuracy, but it preserves dimensions with greater accuracy.
- Model 1 represents the point cloud more accurately than Model 2, whereas Model 2 represents the original tower more accurately than Model 1.
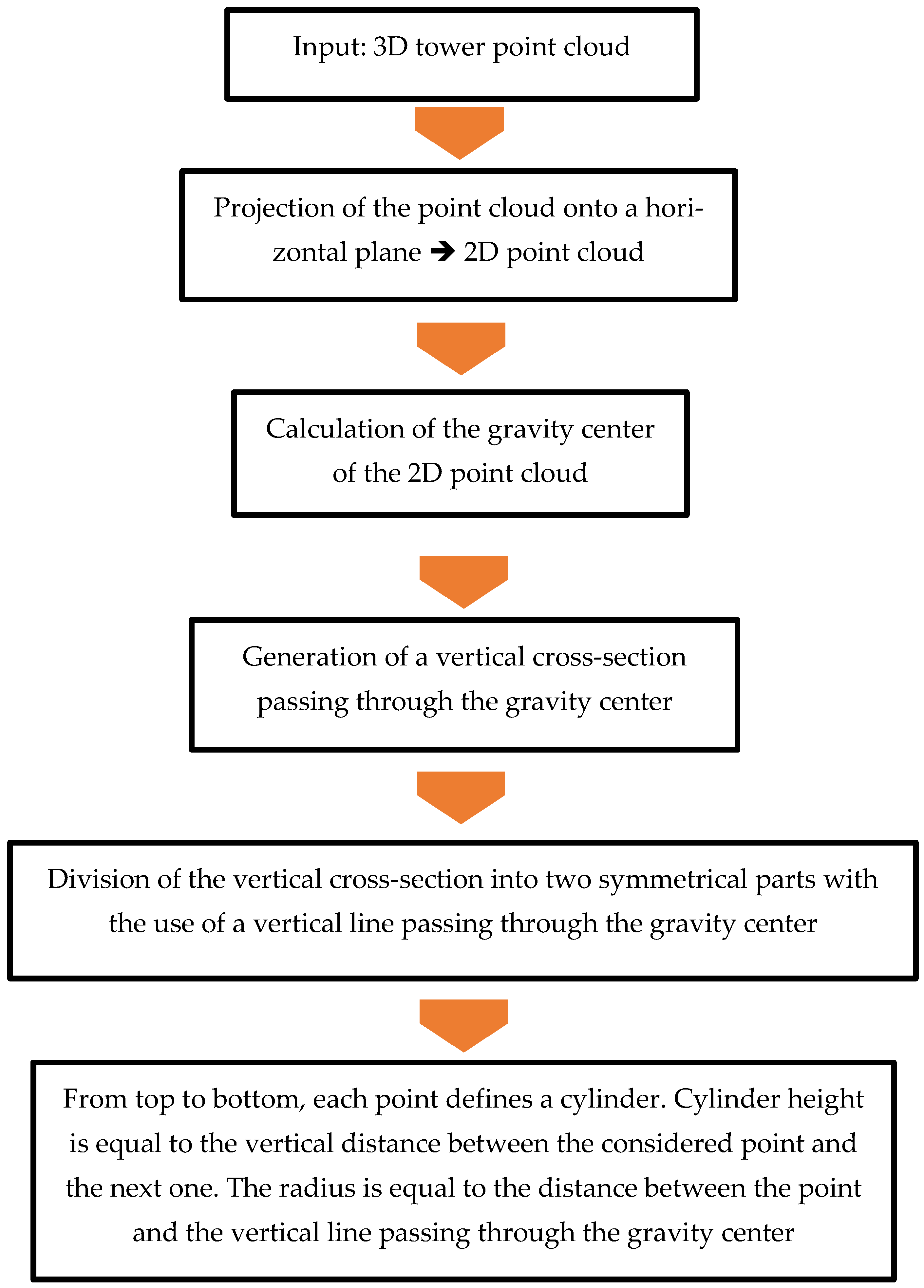
4. Proposed Modeling Approach
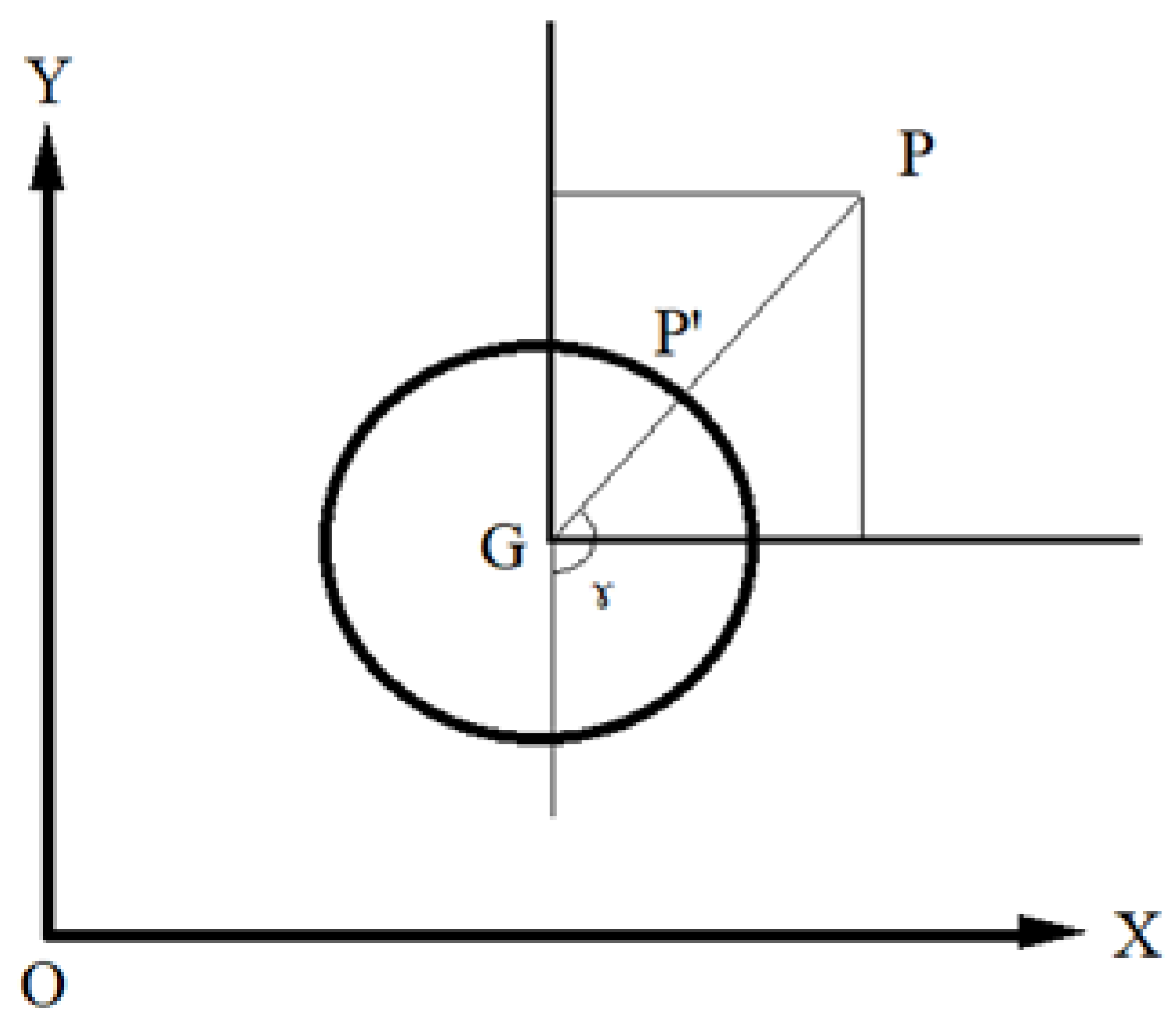
| Algorithm 1 |
| Input (point cloud (X, Y, Z), m, θ) Point cloud sorted in ascending order based on Z values i = find (X > Xg − Td and X < Xg + Td and Y ≤ Yg) SCS = [Y(i), Z(i)] for i = 1 to length (SCS), Step = 1 for j = 0 to m, Step = 1 Zb (i, j+1) = SCS (i, 2) Xb (i, j+1) = Xg + (Yg − SCS (i, 1)) × cos() Yb (i, j+1) = Xg + (Yg − SCS (i, 1)) × sin() Next j Next i Surf (X, Y, Z) |
5. Datasets
6. Results, Accuracy Estimation, and Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dong, Z.; Liang, F.; Yang, B.; Xu, Y.; Zang, Y.; Li, J.; Stilla, U. Registration of large-scale terrestrial laser scanner point clouds: A review and benchmark. ISPRS J. Photogramm. Remote Sens. 2020, 163, 327–342. [Google Scholar] [CrossRef]
- Cheng, L.; Chen, S.; Liu, X.; Xu, H.; Wu, Y.; Li, M.; Chen, Y. Registration of laser scanning point clouds: A review. Sensors 2018, 18, 1641. [Google Scholar] [CrossRef] [PubMed]
- Kulawiak, M. A cost-effective method for reconstructing city-building 3D models from sparse lidar point clouds. Remote Sens. 2022, 14, 1278. [Google Scholar] [CrossRef]
- Yan, W.Y.; Shaker, A.; El-Ashmawy, N. Urban land cover classification using airborne LiDAR data: A review. Remote Sens. Environ. 2015, 158, 295–310. [Google Scholar] [CrossRef]
- Shan, J.; Toth, C.K. Topographic Laser Ranging and Scanning: Principles and Processing, 2nd ed.; Taylor & Francis Group; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar] [CrossRef]
- Xu, Y.; Stilla, U. Towards Building and Civil Infrastructure Reconstruction from Point Clouds: A Review on Data and Key Techniques. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2857–2885. [Google Scholar] [CrossRef]
- Tarsha Kurdi, F.; Awrangjeb, M.; Munir, N. Automatic filtering and 2D modeling of LiDAR building point cloud. Trans. GIS 2021, 25, 164–188. [Google Scholar] [CrossRef]
- Amakhchan, W.; Kurdi, F.T.; Gharineiat, Z.; Boulaassal, H.; Kharki, O.E. Automatic Filtering of LiDAR Building Point Cloud Using Multilayer Perceptron Neuron Network. In Proceedings of the Conference: 3rd International Conference on Big Data and Machine Learning (BML22’), Istanbul, Turkey, 21–31 May 2022. [Google Scholar]
- Wen, C.; Yang, L.; Li, X.; Peng, L.; Chi, T. Directionally constrained fully convolutional neural network for airborne LiDAR point cloud classification. ISPRS J. Photogramm. Remote Sens. 2020, 162, 50–62. [Google Scholar] [CrossRef]
- Tarsha Kurdi, F.; Amakhchan, W.; Gharineiat, Z. Random Forest machine learning technique for automatic vegetation detection and modeling in LiDAR data. Int. J. Environ. Sci. Nat. Resour. 2021, 28, 556234. [Google Scholar] [CrossRef]
- Maltezos, E.; Doulamis, A.; Doulamis, N.; Ioannidis, C. Building extraction from LiDAR data applying deep convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2018, 16, 155–159. [Google Scholar] [CrossRef]
- Wang, X.; Luo, Y.P.; Jiang, T.; Gong, H.; Luo, S.; Zhang, X.W. A new classification method for LIDAR data based on unbalanced support vector machine. In Proceedings of the 2011 International Symposium on Image and Data Fusion, Tengchong, China, 9–11 August 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Yuan, J. Learning building extraction in aerial scenes with convolutional networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 2793–2798. [Google Scholar] [CrossRef]
- Chio, S.H.; Lin, T.Y. The establishment of 3D LOD2 objectivization building models based on data fusion. J. Photogramm. Remote Sens. 2021, 26, 57–73. Available online: https://www.csprs.org.tw/Temp/202106-26-2-57-73.pdf\ (accessed on 16 September 2022).
- Ostrowski, W.; Pilarska, M.; Charyton, J.; Bakuła, K. Analysis of 3D building models accuracy based on the airborne laser scanning point clouds. In International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences; ISPRS: Vienna, Austria, 2018; p. 42. Available online: https://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XLII-2/797/2018/#:~:text=https%3A//doi.org/10.5194/isprs%2Darchives%2DXLII%2D2%2D797%2D2018%2C%202018 (accessed on 16 September 2022).
- Zhang, K.; Yan, J.; Chen, S.C. A framework for automated construction of building models from airborne Lidar measurements. In Topographic Laser Ranging and Scanning: Principles and Processing, 2nd ed.; Shan, J., Toth, C.K., Eds.; Taylor & Francis Group; CRC Press: Boca Raton, FL, USA, 2018; pp. 563–586. [Google Scholar]
- Van Oosferom, P.J.M.; Broekhuizen, M.; Kalogianni, E. BIM models as input for 3D land administration systems for apartment registration. In Proceedings of the 7th International FIG Workshop on 3D Cadastres, New York, NY, USA, 11–13 October 2021; International Federation of Surveyors (FIG): Copenhagen, Denmark, 2021; pp. 53–74. Available online: https://research.tudelft.nl/en/publications/bim-models-as-input-for-3d-land-administration-systems-for-apartm; https://www.proquest.com/results/883F9FCF559E442EPQ/false?accountid=14884\ (accessed on 16 September 2022).
- Beil, C.; Ruhdorfer, R.; Coduro, T.; Kolbe, T.H. Detailed streetspace modeling for multiple applications: Discussions on the proposed CityGML 3.0 transportation model. ISPRS Int. J. Geo-Inf. 2020, 9, 603. [Google Scholar] [CrossRef]
- Biljecki, F.; Lim, J.; Crawford, J.; Moraru, D.; Tauscher, H.; Konde, A.; Adouane, K.; Lawrence, S.; Janssen, P.; Stouffs, R. Extending CityGML for IFC-sourced 3d city models. Autom. Constr. 2021, 121, 103440. [Google Scholar] [CrossRef]
- Jayaraj, P.; Ramiya, A.M. 3D CityGML building modeling from lidar point cloud data. In The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences; Gottingen Tom XLII-5; Copernicus GmbH: Gottingen, Germany, 2018; pp. 175–180. Available online: https://www.proquest.com/opeview/47e1bca8fac2930d4be04e70741e905f/1 (accessed on 20 September 2022). [CrossRef]
- Lukač, N.; Žalik, B. GPU-based roofs’ solar potential estimation using LiDAR data. Comput. Geosci. 2013, 52, 34–41. [Google Scholar] [CrossRef]
- Beil, C.; Kutzner, T.; Schwab, B.; Willenborg, B.; Gawronski, A.; Kolbe, T.H. Integration of 3D point clouds with semantic 3D City Models—providing semantic information beyond classification. In ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences; Gottingen Tom VIII-4/W2-2021; Copernicus GmbH: Gottingen, Germany, 2021; pp. 105–112. Available online: https://www.proquest.com/openview/6c8a777f6d7c8645edb6dad807b248aa/1?pq-origsite=gscholar&cbl=2037681 (accessed on 16 September 2022). [CrossRef]
- Chaturvedi, K.; Matheus, A.; Nguyen Son, H.; Kolbe, H. Securing spatial data infrastructures for distributed smart city applications and services. Future Gener. Comput. Syst. 2019, 101, 723–736. [Google Scholar] [CrossRef]
- Kutzner, T.; Chaturvedi, K.; Kolbe, T.H. CityGML 3.0: New functions open up new applications. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2020, 88, 43–61. [Google Scholar] [CrossRef]
- Shirinyan, E.; Petrova-Antonova, D. Modeling buildings in CityGML LOD1: Building parts, terrain intersection curve, and address features. ISPRS Int. J. Geo-Inf. 2022, 11, 166. [Google Scholar] [CrossRef]
- Biljecki, F.; Ledoux, H.; Stoter, J. Generation of multi-LOD 3D city models in CityGML with the procedural modelling engine random3dcity, ISPRS ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2016, IV-4/W1, 51–59. [Google Scholar] [CrossRef]
- Gilani, S.A.N.; Awrangjeb, M.; Lu, G. Segmentation of airborne point cloud data for automatic building roof extraction. GISci. Remote Sens. 2018, 55, 63–89. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, L.; Mathiopoulos, P.; Huang, X. A methodology for automated segmentation and reconstruction of urban 3-D buildings from ALS point clouds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4199–4217. [Google Scholar] [CrossRef]
- Dey, E.K.; Tarsha Kurdi, F.; Awrangjeb, M.; Stantic, B. Effective selection of variable point neighbourhood for feature point extraction from aerial building point cloud data. Remote Sens. 2021, 13, 1520. [Google Scholar] [CrossRef]
- Dong, Y.; Hou, M.; Xu, B.; Li, Y.; Ji, Y. Ming and Qing dynasty official-style architecture roof types classification based on the 3D point cloud. ISPRS Int. J. Geo-Inf. 2021, 10, 650. [Google Scholar] [CrossRef]
- Awrangjeb, M.; Gilani, S.A.N.; Siddiqui, F.U. An effective datadriven method for 3-d building roof reconstruction and robust change detection. Remote Sens. 2018, 10, 1512. [Google Scholar] [CrossRef]
- Tarsha Kurdi, F.; Awrangjeb, M.; Munir, N. Automatic 2D modelling of inner roof planes boundaries starting from Lidar data. In Proceedings of the 14th 3D GeoInfo 2019, Singapore, 26–27 September 2019. [Google Scholar] [CrossRef]
- Tarsha Kurdi, F.; Gharineiat, Z.; Campbell, G.; Dey, E.K.; Awrangjeb, M. Full series algorithm of automatic building extraction and modeling from LiDAR data. In Proceedings of the Digital Image Computing: Techniques and Applications (DICTA), Gold Coast, Australia, 29 November–1 December 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Dey, E.K.; Awrangjeb, M.; Tarsha Kurdi, F.; Stantic, B. Building boundary point extraction from LiDAR point cloud data. In Proceedings of the 2021 Digital Image Computing: Techniques and Applications (DICTA), Gold Coast, Australia, 29 November–1 December 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Huang, J.; Stoter, J.; Peters, R.; Nan, L. City3D: Large-scale building reconstruction from airborne LiDAR point clouds. Remote Sens. 2022, 14, 2254. [Google Scholar] [CrossRef]
- Borisov, M.; Radulovi, V.; Ilić, Z.; Petrovi, V.; Rakićević, N. An automated process of creating 3D city model for monitoring urban infrastructures. J. Geogr. Res. 2022, 5. Available online: https://ojs.bilpublishing.com/index.php/j (accessed on 16 September 2022). [CrossRef]
- Tarsha Kurdi, F.; Gharineiat, Z.; Campbell, G.; Awrangjeb, M.; Dey, E.K. Automatic filtering of LiDAR building point cloud in case of trees associated to building roof. Remote Sens. 2022, 14, 430. [Google Scholar] [CrossRef]
- Tarsha Kurdi, F.; Awrangjeb, M. Comparison of LiDAR building point cloud with reference model for deep comprehension of cloud structure. Can. J. Remote Sens. 2020, 46, 603–621. [Google Scholar] [CrossRef]
- Tarsha Kurdi, T.; Landes, T.; Grussenmeyer, P.; Koehl, M. Model-driven and data-driven approaches using Lidar data: Analysis and comparison. In Proceedings of the ISPRS Workshop, Photogrammetric Image Analysis (PIA07), Munich, Germany, 19–21 September 2007; International Archives of Photogrammetry, Remote Sensing and Spatial Information Systems: Stuttgart, Germany, 2007; Volume XXXVI, pp. 87–92, ISSN 1682-1750. [Google Scholar]
- Cheng, L.; Zhang, W.; Zhong, L.; Du, P.; Li, M. Framework for evaluating visual and geometric quality of three-dimensional models. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1281–1294. [Google Scholar] [CrossRef]
- Rottensteiner, F.; Clode, S. Building and road extraction from Lidar data. In Topographic Laser Ranging and Scanning: Principles and Processing, 2nd ed.; Shan, J., Toth, C.K., Eds.; Taylor & Francis Group; CRC Press: Boca Raton, FL, USA, 2018; pp. 485–522. [Google Scholar]
- Jung, J.; Sohn, G. Progressive modeling of 3D building rooftops from airborne Lidar and imagery. In Topographic Laser Ranging and Scanning: Principles and Processing, 2nd ed.; Shan, J., Toth, C.K., Eds.; Taylor & Francis Group; CRC Press: Boca Raton, FL, USA, 2018; pp. 523–562. [Google Scholar]
- Dorninger, P.; Pfeifer, N. A comprehensive automated 3D approach for building extraction, reconstruction, and regularization from airborne laser scanning point clouds. Sensors 2008, 8, 7323–7343. [Google Scholar] [CrossRef]
- Sampath, A.; Shan, J. Segmentation and reconstruction of polyhedral building roofs from aerial Lidar point clouds. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1154–1567. [Google Scholar] [CrossRef]
- Park, S.Y.; Lee, D.G.; Yoo, E.J.; Lee, D.C. Segmentation of Lidar data using multilevel cube code. J. Sens. 2019, 2019, 4098413. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
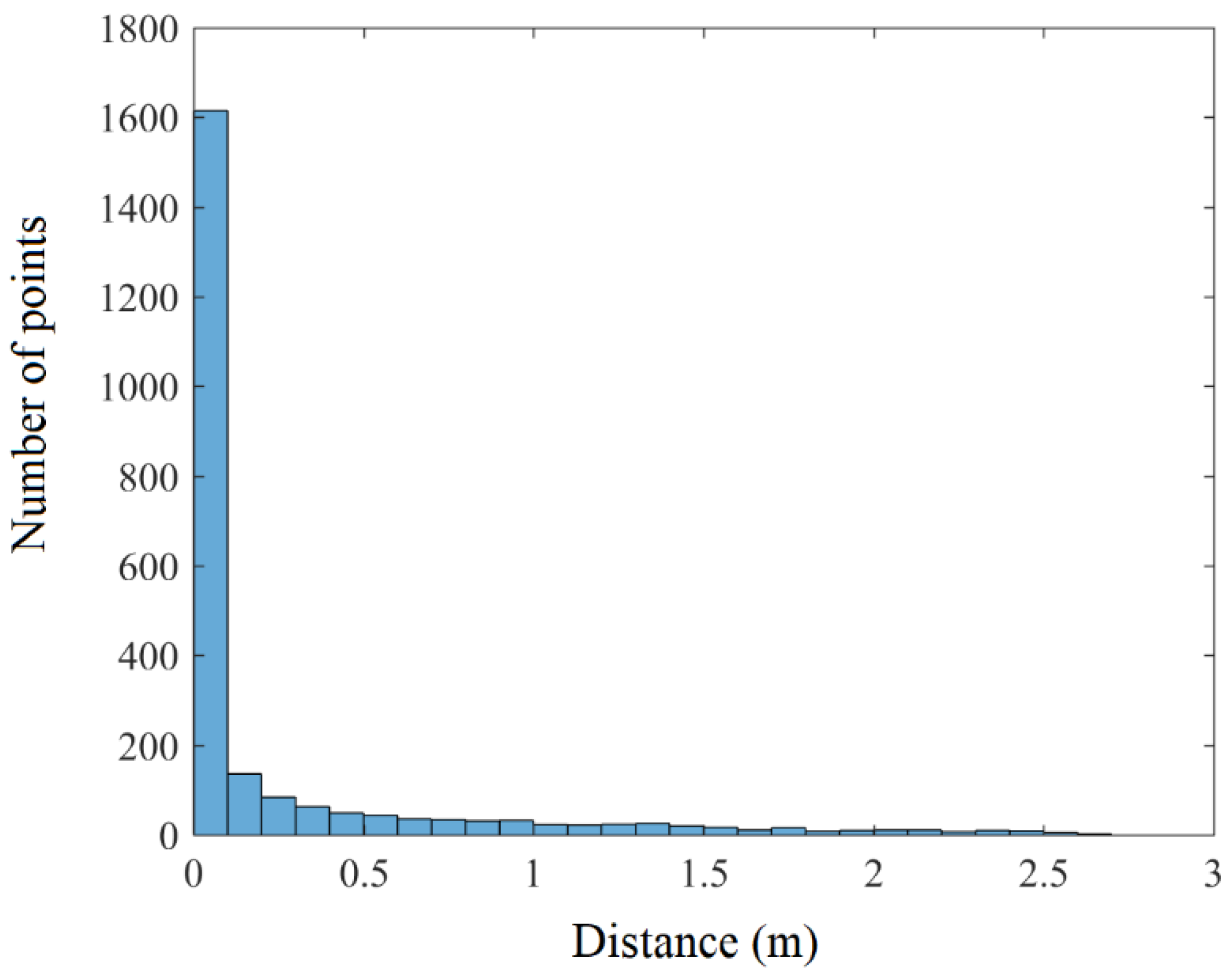
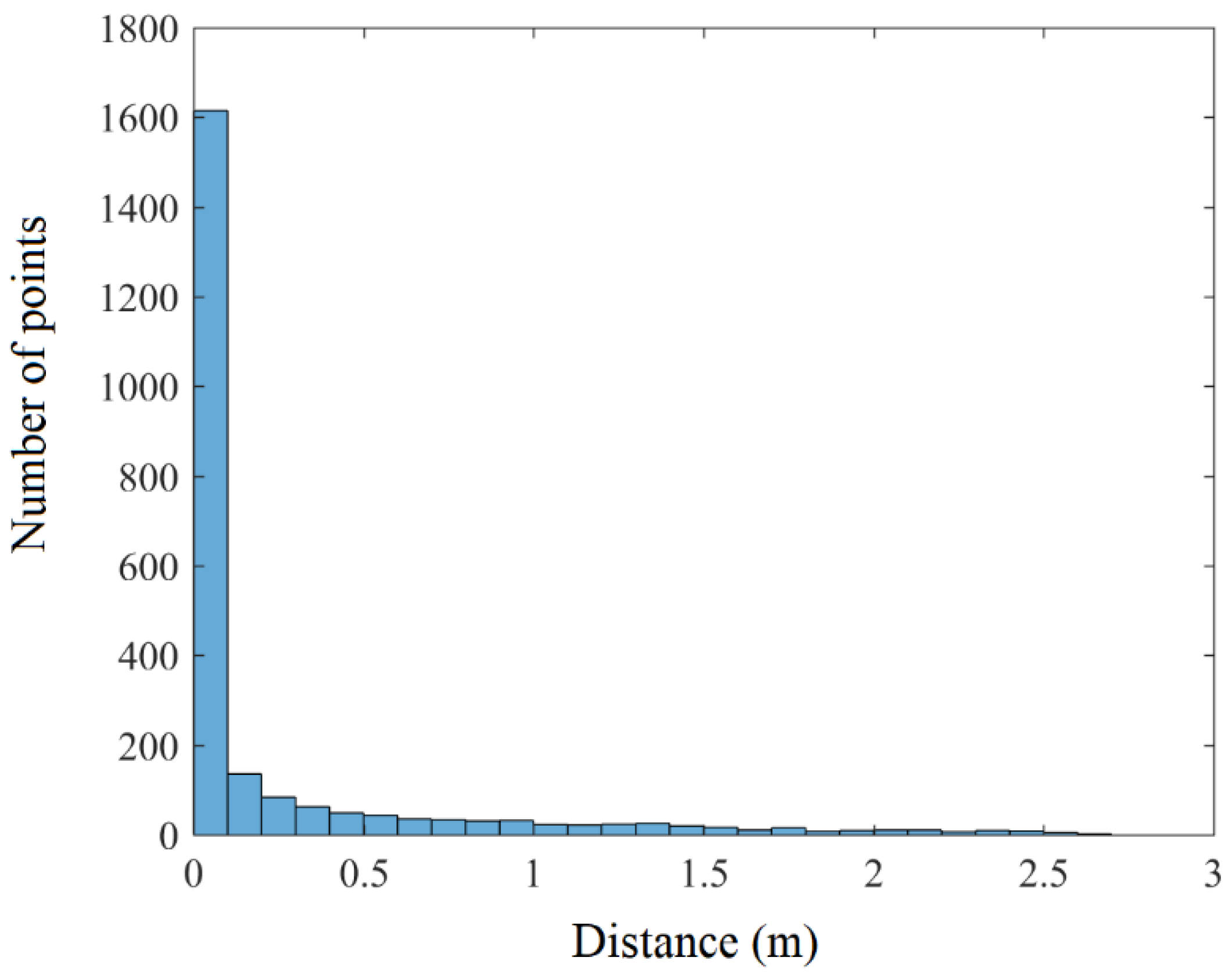
| Tower Number Name–City | Number of Points | Number of Points | σ (m) | |
|---|---|---|---|---|
| Dist ϵ (0, 0.3 m) | Dist > 0.3 m | |||
| 1 Olsztyn City Hall | 2330 | 1833 | 497 | 0.49 |
| 2 Building with a chimney in Olsztyn | 330 | 244 | 86 | 0.9 |
| 3 Water tower in Olsztyn | 4974 | 2217 | 2757 | 0.84 |
| 4 Water tower in Bydgoszcz | 5500 | 5246 | 254 | 0.21 |
| 5 Water tower in Siedlce | 4811 | 3825 | 986 | 1.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lewandowicz, E.; Tarsha Kurdi, F.; Gharineiat, Z. 3D LoD2 and LoD3 Modeling of Buildings with Ornamental Towers and Turrets Based on LiDAR Data. Remote Sens. 2022, 14, 4687. https://doi.org/10.3390/rs14194687
Lewandowicz E, Tarsha Kurdi F, Gharineiat Z. 3D LoD2 and LoD3 Modeling of Buildings with Ornamental Towers and Turrets Based on LiDAR Data. Remote Sensing. 2022; 14(19):4687. https://doi.org/10.3390/rs14194687
Chicago/Turabian StyleLewandowicz, Elżbieta, Fayez Tarsha Kurdi, and Zahra Gharineiat. 2022. "3D LoD2 and LoD3 Modeling of Buildings with Ornamental Towers and Turrets Based on LiDAR Data" Remote Sensing 14, no. 19: 4687. https://doi.org/10.3390/rs14194687
APA StyleLewandowicz, E., Tarsha Kurdi, F., & Gharineiat, Z. (2022). 3D LoD2 and LoD3 Modeling of Buildings with Ornamental Towers and Turrets Based on LiDAR Data. Remote Sensing, 14(19), 4687. https://doi.org/10.3390/rs14194687