
Impact of Feature-Dependent Static Background Error Covariances for Satellite-Derived Humidity Assimilation on Analyses and Forecasts of Multiple Sea Fog Cases over the Yellow Sea


Abstract
1. Introduction
2. Methodology
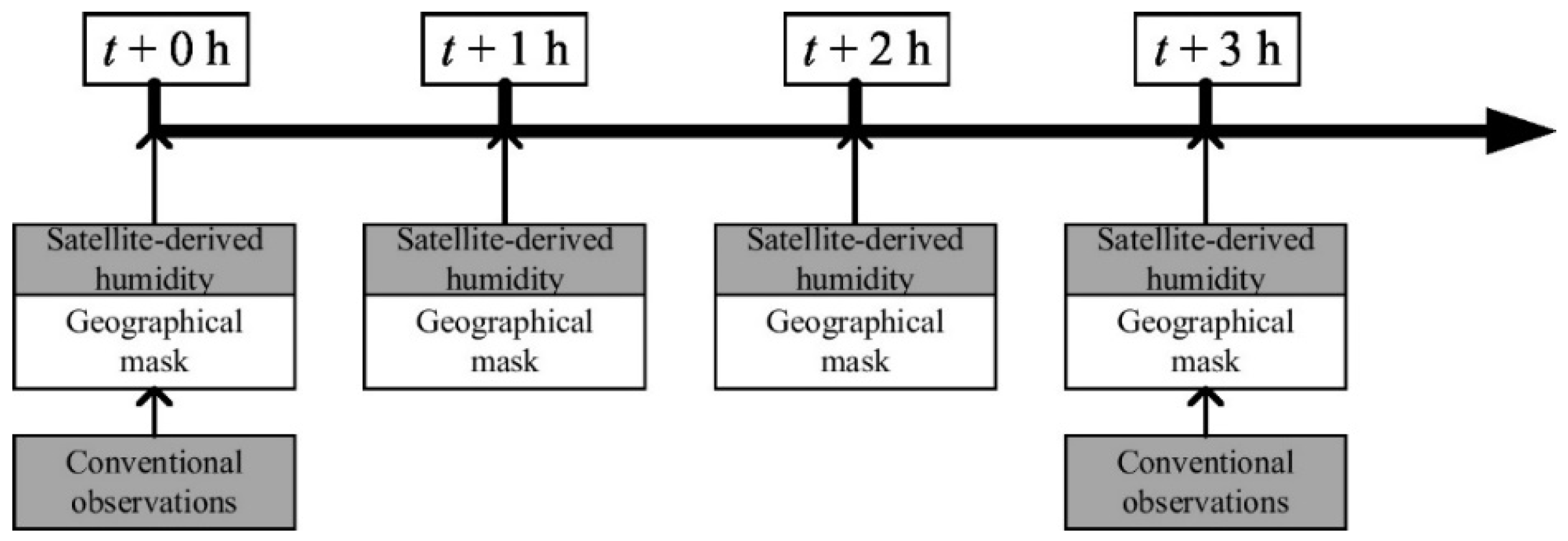
2.1. Derivation and Assimilation of Satellite-Derived Humidity
2.2. Design of Feature-Dependent B

2.3. Calculation of B-Matrix
3. Numerical Experiments
3.1. Case Overview
3.2. Model Configuration
3.3. Assimilation and Forecast Experiments
4. Understanding the Impact of Feature-Dependent B on the Analyses and Forecasts
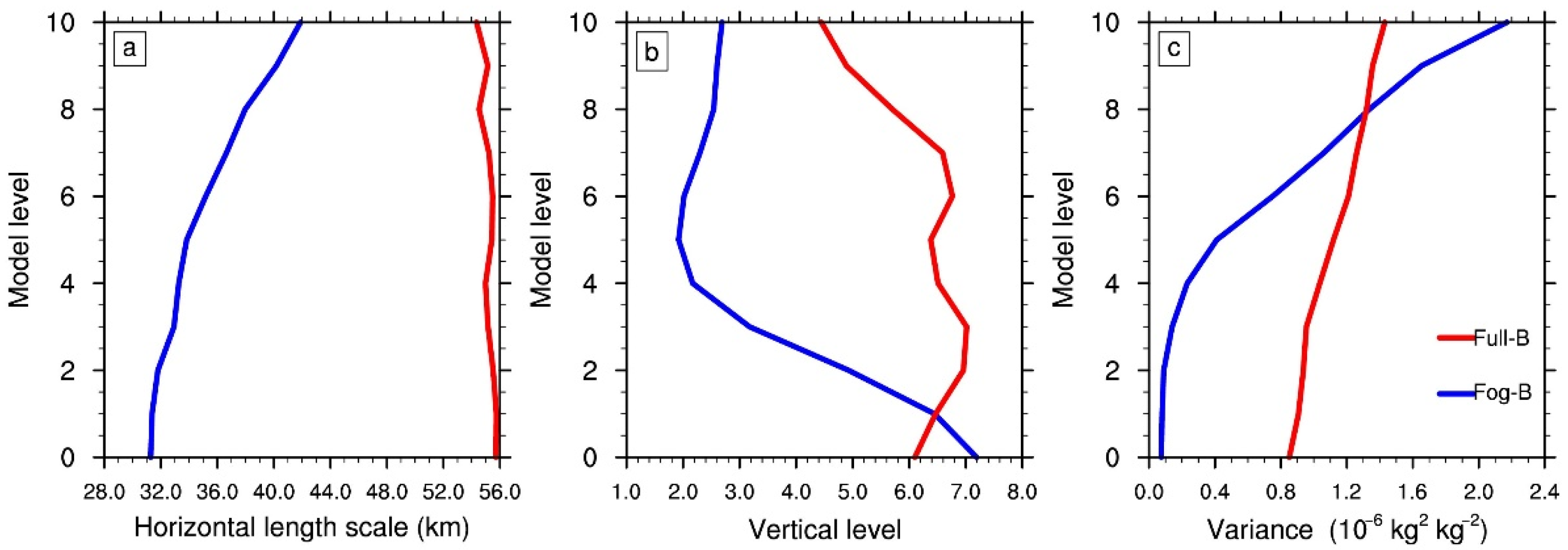
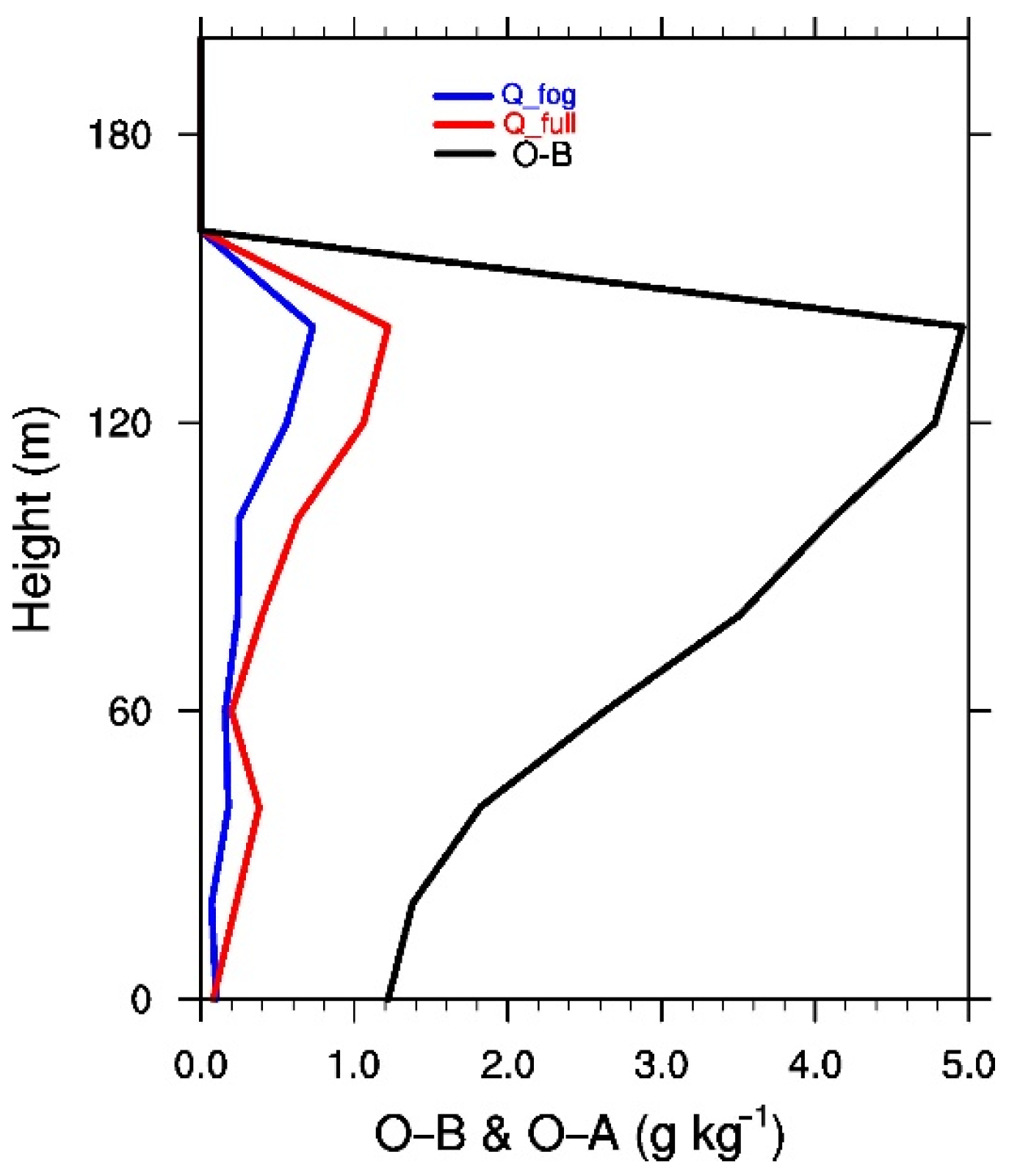
4.1. Difference in Error Statistics between Fog-B and Full-B
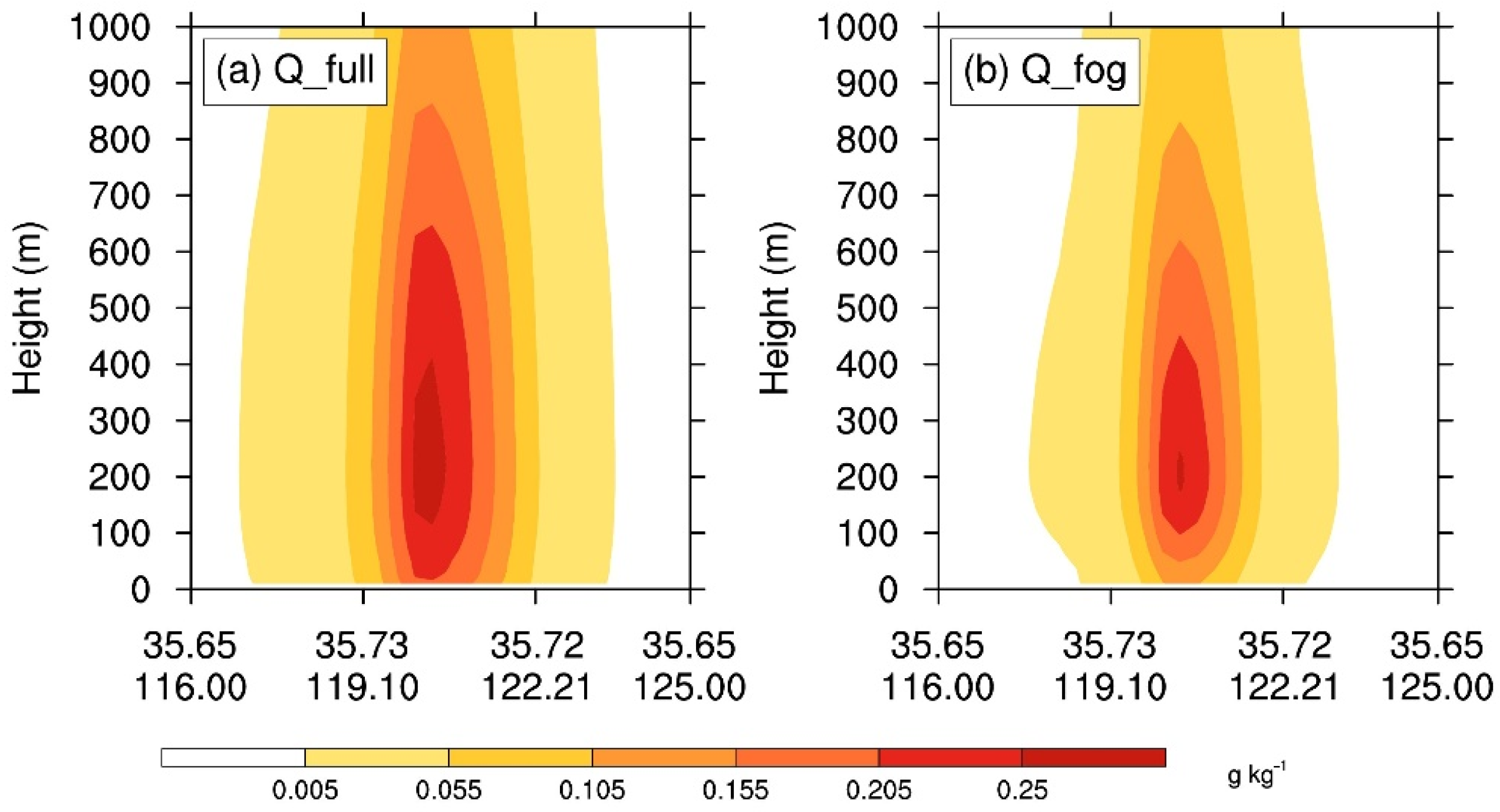
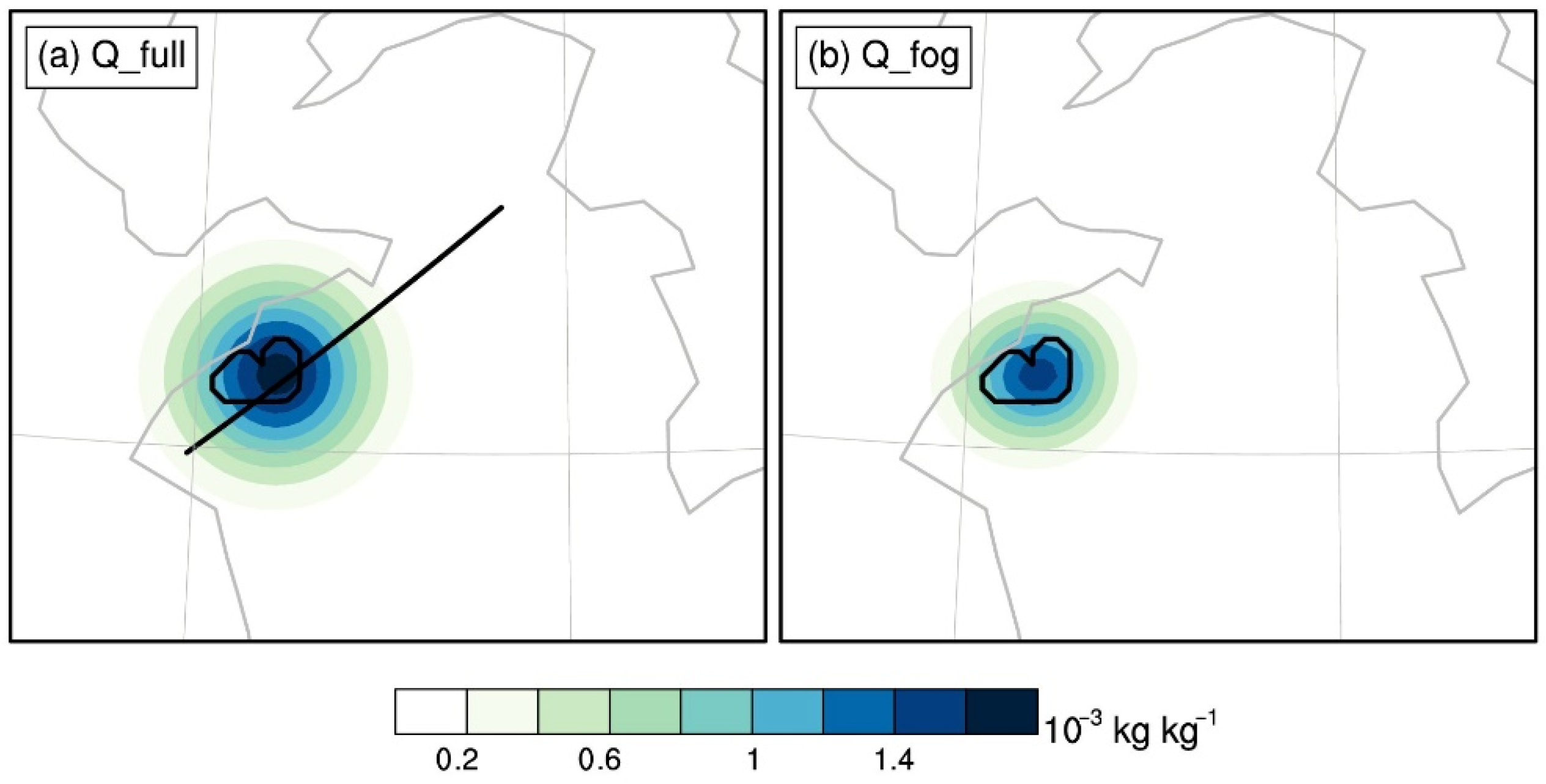
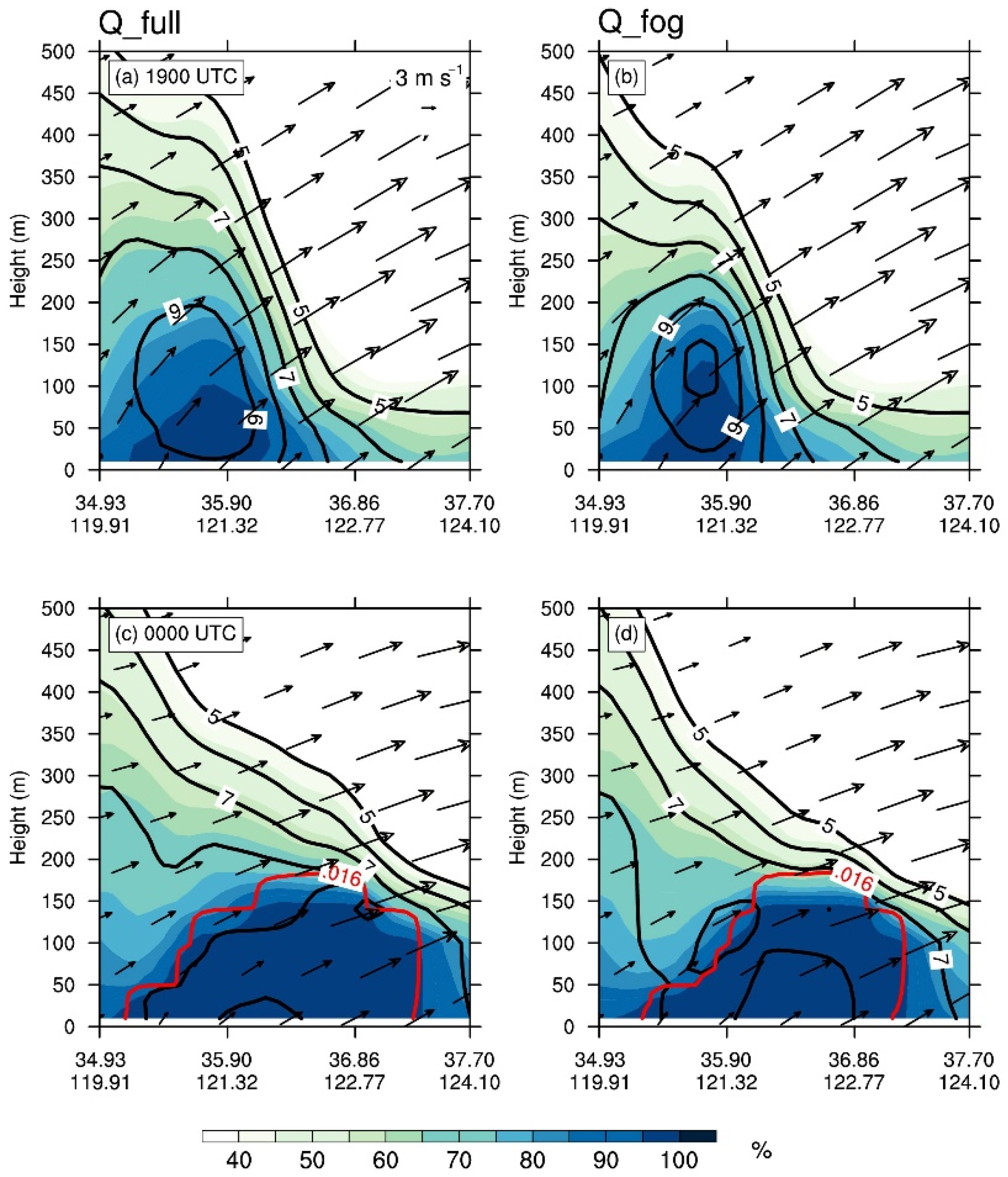
4.2. Differences in Analyses and Forecasts between Experiments Using Fog-B and Full-B
5. Evaluating the Role of Feature-Dependent B in Sea Fog Coverage Forecasts
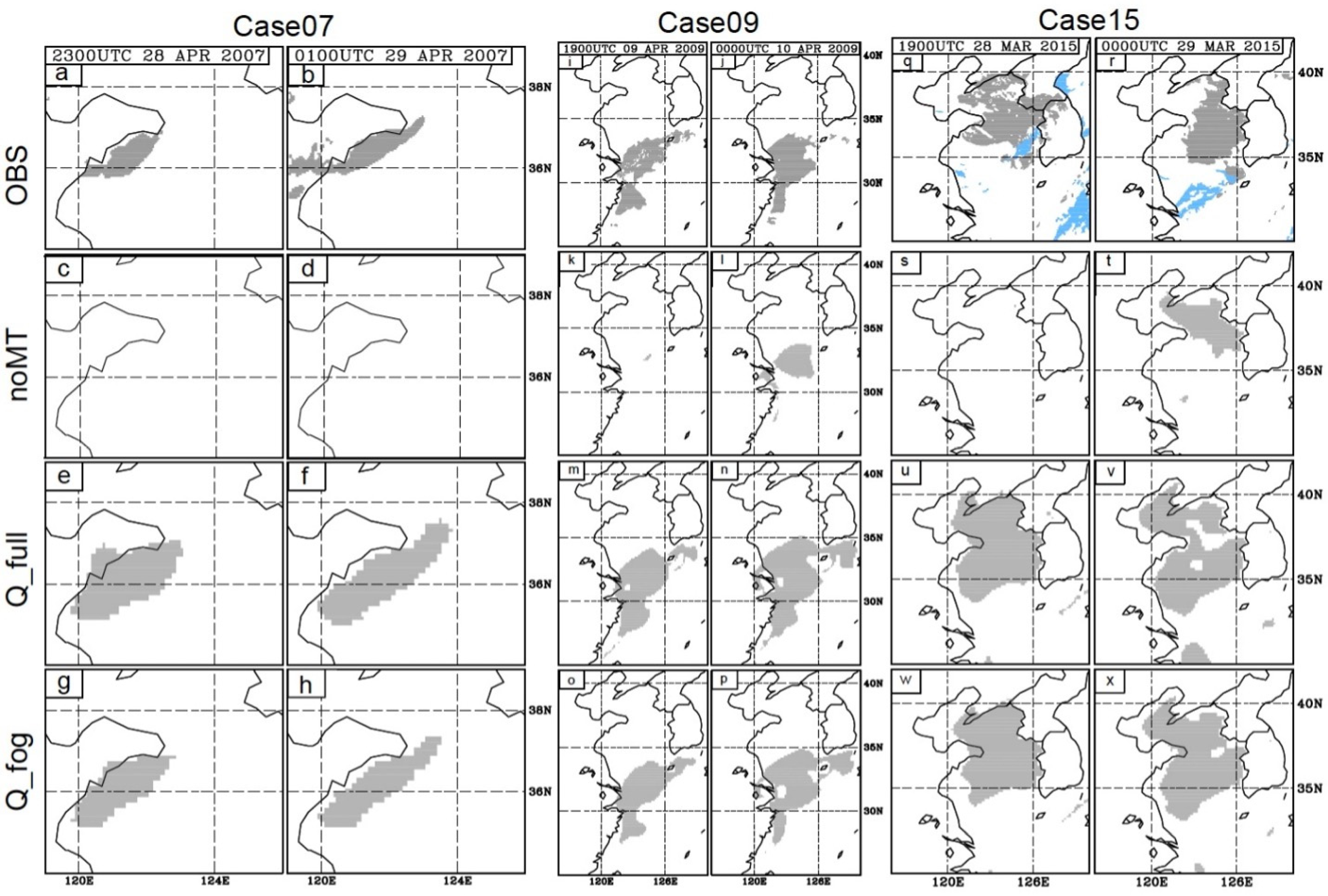
5.1. Sea Fog Coverage
5.1.1. Subjective Evaluation
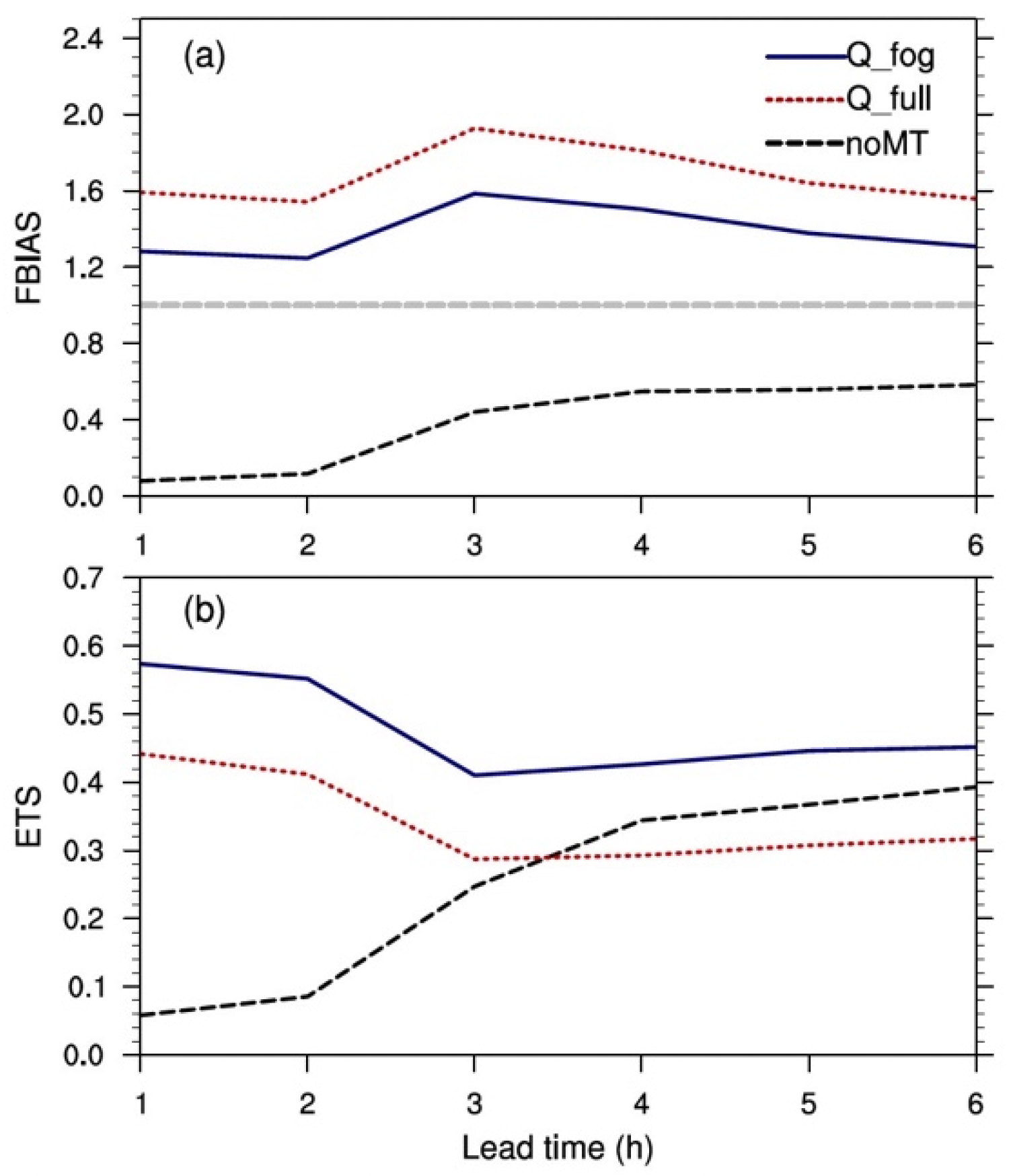
5.1.2. Quantitative Evaluation
5.2. MABL Moisture Conditions
6. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, B. Sea Fog; China Ocean Press: Beijing, China, 1985. [Google Scholar]
- Koračin, D.; Dorman, C.E. Marine fog: Challenges and Advancements in Observations, Modeling, and Forecasting; Springer International Publishing: San Diego, CA, USA, 2017. [Google Scholar]
- Lewis, J.M.; Koračin, D.; Redmond, K.T. Sea fog research in the United Kingdom and United States. Bull. Am. Meteorol. Soc. 2004, 85, 395–408. [Google Scholar] [CrossRef]
- Zhang, S.; Bao, X. The main advances in sea fog research in China. J. Ocean Univ. China 2008, 38, 359–366. [Google Scholar] [CrossRef]
- Zhang, S.; Xie, S.; Liu, Q.; Yang, Y.; Wang, X.; Ren, Z. Seasonal variations of Yellow Sea fog: Observations and mechanisms. J. Clim. 2009, 22, 6758–6772. [Google Scholar] [CrossRef]
- Fu, G.; Zhang, S.; Gao, S.; Li, P. Understanding of Sea Fog over the China Seas; China Meteorological Press: Beijing, China, 2012. [Google Scholar]
- WMO. International Meteorological Vocabulary; World Meteorological Organization: Geneva, Switzerland, 1966. [Google Scholar]
- Gao, S.; Wang, Y.; Fu, G. Ensemble forecast of a sea fog over the Yellow Sea. J. Ocean Univ. China 2014, 44, 1–11. [Google Scholar] [CrossRef]
- Lu, X.; Gao, S.; Rao, L.; Wang, Y. Sensitivity study of WRF parametrization schemes for the spring sea fog in the Yellow Sea. J. Appl. Meteorol. Sci. 2014, 25, 312–320. [Google Scholar]
- Wang, Y.; Gao, S.; Fu, G.; Sun, J.; Zhang, S. Assimilating MTSAT-derived humidity in nowcasting sea fog over the Yellow Sea. Wea. Forecast. 2014, 29, 205–225. [Google Scholar] [CrossRef]
- Yang, Y.; Gao, S. Sensitivity study of vertical resolution in WRF numerical simulation for sea fog over the Yellow Sea. Acta Meteorol. Sin. 2016, 74, 974–988. [Google Scholar] [CrossRef]
- Yang, Y.; Gao, S. The impact of turbulent diffusion driven by fog-top cooling on sea fog development. J. Geophys. Res. Atmos. 2020, 125, e2019JD031562. [Google Scholar] [CrossRef]
- Gao, X.; Gao, S.; Yang, Y. A comparison between 3DVAR and EnKF for data assimilation effects on the Yellow Sea fog forecast. Atmosphere 2018, 9, 346. [Google Scholar] [CrossRef]
- Yang, Y.; Hu, X.M.; Gao, S.; Wang, Y. Sensitivity of WRF simulations with the YSU PBL scheme to the lowest model level height for a sea fog event over the Yellow Sea. Atmos. Res. 2019, 215, 253–267. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, Y.; Gao, S.; Yuan, X. A new observation operator for the assimilation of satellite-derived relative humidity: Methodology and experiments with three sea fog events over the Yellow Sea. J. Meteorol. Res. 2021, 35, 1–21. [Google Scholar] [CrossRef]
- Gao, X.; Gao, S. Impact of Multivariate background error covariance on the WRF-3DVAR assimilation for the Yellow Sea Fog modeling. Adv. Meteorol. 2020, 2020, 8816185. [Google Scholar] [CrossRef]
- Jin, G.; Gao, S.; Shi, H.; Lu, X.; Yang, Y.; Zheng, Q. Impacts of sea–land breeze circulation on the formation and development of coastal sea fog along the Shandong Peninsula: A case study. Atmosphere 2022, 13, 165. [Google Scholar] [CrossRef]
- Gao, S.; Lin, H.; Shen, B.; Fu, G. A heavy sea fog event over the Yellow Sea in March 2005: Analysis and numerical modeling. Adv. Atmos. Sci. 2007, 24, 65–81. [Google Scholar] [CrossRef]
- Li, R.; Gao, S.; Wang, Y. Numerical study on direct assimilation of satellite radiances for sea fog over the Yellow Sea. J. Ocean Univ. China 2012, 42, 10–20. [Google Scholar] [CrossRef]
- Parrish, D.F.; Derber, J.C. The National Meteorological Center’s spectral statistical-interpolation system. Mon. Weather Rev. 1992, 120, 1747–1763. [Google Scholar] [CrossRef]
- Ménétrier, B.; Montmerle, T. Heterogeneous background error covariances for the analysis and forecast of fog events. Q. J. R. Meteor. Soc. 2011, 137, 2004–2013. [Google Scholar] [CrossRef]
- Michel, Y.; Auligné, T.; Montmerle, T. Heterogeneous convective-scale background error covariances with the in- clusion of hydrometeor variables. Mon. Weather Rev. 2011, 139, 2994–3015. [Google Scholar] [CrossRef]
- Caron, J.F.; Fillion, L. An examination of background error correlations between mass and rotational wind over precipitation regions. Mon. Weather Rev. 2010, 138, 563–578. [Google Scholar] [CrossRef]
- Montmerle, T.; Berre, L. Diagnosis and formulation of heterogeneous background-error covariances at the mesoscale. Q. J. R. Meteorol. Soc. 2010, 136, 1408–1420. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X. Development of convective-scale static background error covariance within GSI-Based hybrid EnVar system for direct radar reflectivity data assimilation. Mon. Weather Rev. 2021, 149, 2713–2736. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Duda, M.G.; Huang, X.Y.; Wang, W.; Powers, J.G. A Description of the Advanced Research WRF Version 3; NCAR Technical Note, NCAR/TN-475+STR. 2008. Available online: http://opensky.ucar.edu/islandora/object/technotes:500 (accessed on 8 September 2022).
- Gao, S.; Wu, W.; Zhu, L.; Fu, G.; Huang, B. Detection of nighttime sea fog/stratus over the Huang-hai Sea using MTSAT-1R IR data. Acta Oceanol. Sin. 2009, 28, 23–35. [Google Scholar]
- Yi, L.; Thies, B.; Zhang, S.; Shi, X.; Bendix, J. Optical thickness and effective radius retrievals of low stratus and fog from MTSAT daytime data as a prerequisite for Yellow Sea Fog detection. Remote Sens. 2016, 8, 8. [Google Scholar] [CrossRef]
- Yang, J.H.; Yoo, J.M.; Choi, Y.S.; Wu, D.; Jeong, J.H. Probability index of low stratus and fog at dawn using dual geostationary satellite observations from COMS and FY-2D near the Korean Peninsula. Remote Sens. 2019, 11, 1283. [Google Scholar] [CrossRef]
- Kim, S.H.; Suh, M.S.; Han, J.H. Development of fog detection algorithm during nighttime using Himawari-8/AHI satellite and ground observation data. Asia-Pacific J. Atmos. Sci. 2019, 55, 337–350. [Google Scholar] [CrossRef]
- Kim, D.; Park, M.S.; Park, Y.J.; Kim, W. Geostationary Ocean Color Imager (GOCI) marine fog detection in combination with Himawari-8 based on the decision tree. Remote Sens. 2020, 12, 149. [Google Scholar] [CrossRef]
- Takahashi, M. Algorithm Theoretical Basis Document (ATBD) for GSICS Infrared Inter-Calibration of Imagers on MTSAT-1R/-2 and Himawari-8/-9 Using AIRS and IASI Hyperspectral Observations. Meteorological Satellite Center, Japan Meteorological Agency, 2017. Available online: https://www.data.jma.go.jp/mscweb/data/monitoring/gsics/ir/ATBD_for_JMA_Demonstration_GSICS_Inter-Calibration_of_MTSAT_Himawari-AIRSIASI.pdf (accessed on 25 July 2022).
- Ellrod, G.P. Advances in the detection and analysis of fog at night using GOES multispectral infrared imagery. Weather Forecast. 1995, 10, 606–619. [Google Scholar] [CrossRef]
- Kästner, M.; Kriebel, K.T.; Meerkötter, R.; Renger, W.; Ruppersberg, G.H.; Wndling, P. Comparison of cirrus height and optical depth derived from satellite and aircraft measurements. Mon. Weather Rev. 1993, 121, 2708–2718. [Google Scholar] [CrossRef]
- Fitzpatrick, M.F.; Brandt, R.E.; Warren, S.G. Transmission of solar radiation by clouds over snow and ice surfaces: A parameterization in terms of optical depth, solar zenith angle, and surface albedo. J. Clim. 2004, 17, 266–275. [Google Scholar] [CrossRef]
- Sorli, B.; Pascal-Delannoy, F.; Giani, A.; Foucaran, A.; Boyer, A. Fast humidity sensor for high range 80%–95% RH. Sens. Actuators 2002, 100, 24–31. [Google Scholar] [CrossRef]
- Ladwig, T.; Alexander, C.R.; Dowell, D.; Ge, G.; Hartsough, C.; Hu, M.; Kenyon, J.; Olson, J.; Weygandt, S.S. Cloud observation assimilation in future operational convective-allowing models. In Proceedings of the 25th Conference on Integrated Observing and Assimilation Systems for the Atmosphere, Oceans, and Land Surface (IOAS-AOLS), Virtual, 13 January 2021; Available online: https://ams.confex.com/ams/101ANNUAL/meetingapp.cgi/Paper/379189 (accessed on 25 July 2022).
- Benjamin, S.G.; James, E.P.; Hu, M.; Alexander, C.R.; Ladwid, T.T.; Brown, J.M.; Weygandt, S.S.; Turner, D.D.; Minnis, P.; Smith, W.L., Jr.; et al. Stratiform cloud-hydrometeor assimilation for HRRR and RAP model short-range weather prediction. Mon. Weather Rev. 2021, 149, 2673–2694. [Google Scholar] [CrossRef]
- Ha, S.Y.; Snyder, C. Influence of surface observations in mesoscale data assimilation using an ensemble Kalman filter. Mon. Weather Rev. 2014, 142, 1489–1508. [Google Scholar] [CrossRef][Green Version]
- Wang, X. Incorporating Ensemble Covariance in the Gridpoint Statistical Interpolation Variational Minimization: A Mathematical Framework. Mon. Weather Rev. 2010, 138, 2990–2995. [Google Scholar] [CrossRef]
- Daley, R. Atmospheric Data Analysis; Cambridge University Press: Cambridge, UK, 1991; ISBN 978-052-138-215-1. [Google Scholar]
- Barker, D.M.; Huang, W.; Guo, Y.R.; Bourgeois, A.j.; Xiao, Q.N. A Three-Dimensional Variational Data Assimilation System for MM5: Implementation and Initial Results. Mon. Weather Rev. 2004, 132, 897–914. [Google Scholar] [CrossRef]
- Descombes, G.; Auligné, T.; Vandenberghe, F.; Barker, D.M.; Barré, J. Generalized background error covariance matrix model (GEN-BE v2.0). Geosci. Model Dev. 2015, 8, 669–696. [Google Scholar] [CrossRef]
- Pereira, M.B.; Berre, L. The Use of an Ensemble Approach to Study the Background Error Covariances in a Global NWP Model. Mon. Weather Rev. 2006, 134, 2466–2489. [Google Scholar] [CrossRef]
- Fisher, M. Background error covariance modelling. In Proceedings of the Recent Development in Data Assimilation for Atmosphere and Ocean. Shinfield Park, Reading, UK, 8–12 September 2003; Available online: https://www.ecmwf.int/en/elibrary/9404-background-error-covariance-modelling (accessed on 25 July 2022).
- Stanesic, A.; Horvath, K.; Keresturi, E. Comparison of NMC and ensemble-based climatological background-error covariances in an operational limited-area data assimilation system. Atmosphere 2019, 10, 570. [Google Scholar] [CrossRef]
- Zhou, B.; Du, J. Fog prediction from a multimodel mesoscale ensemble prediction system. Weather Forecast. 2010, 25, 303–322. [Google Scholar] [CrossRef]
- Yang, Y.; Gao, S. Analysis on the synoptic characteristics and inversion layer formation of the Yellow Sea fogs. J. Ocean Univ. China 2015, 45, 19–30. [Google Scholar] [CrossRef]
- Koračin, D.; Dorman, C.E.; Lewis, J.M.; Hudson, J.G.; Wilcox, E.M.; Torregrosa, A. Marine fog: A review. Atmos. Res. 2014, 143, 142–175. [Google Scholar] [CrossRef]
- Hong, S.Y.; Noh, Y.; Dudhia, J. A new vertical diffusion package with an explicit treatment of entrainment processes. Mon. Wea. Rev. 2006, 134, 2318–2341. [Google Scholar] [CrossRef]
- Hong, S.Y. A new stable boundary-layer mixing scheme and its impact on the simulated East Asian summer monsoon. Q. J. R. Meteorol. Soc. 2010, 136, 1481–1496. [Google Scholar] [CrossRef]
- Zhang, D.; Anthes, R.A. A high-resolution model of the planetary boundary layer—Sensitivity tests and comparisons with SESAME-79 data. J. Appl. Meteorol. 1982, 21, 1594–1609. [Google Scholar] [CrossRef]
- Jiménez, P.A.; Dudhia, J.; González-Rouco, J.F.; Navarro, J.; Montávez, J.P.; García-Bustamante, E. A revised scheme for the WRF surface layer formulation. Mon. Weather Rev. 2012, 140, 898–918. [Google Scholar] [CrossRef]
- Lin, Y.L.; Farley, R.D.; Orville, H.D. Bulk parameterization of the snow field in a cloud model. J. Clim. Appl. Meteorol. 1983, 22, 1065–1092. [Google Scholar] [CrossRef]
- Iacono, M.J.; Delamere, J.S.; Mlawer, E.J.; Shephard, M.W.; Clough, S.A.; Collins, W.D. Radiative forcing by long-lived greenhouse gases: Calculations with the AER radiative transfer models. J. Geophys. Res. Atmos. 2008, 113, D13103. [Google Scholar] [CrossRef]
- Kain, J.S.; Fritsch, J.M. A one-dimensional entraining/detraining plume model and its application in convective parameterization. J. Atmos. Sci. 1990, 47, 2784–2802. [Google Scholar] [CrossRef]
- Kain, J.S. The Kain–Fritsch convective parameterization: An update. J. Appl. Meteorol. 2004, 43, 170–181. [Google Scholar] [CrossRef]
- Tewari, M.; Chen, F.; Wang, W.; Dudhia, J.; LeMone, M.A.; Mitchell, K.; Ek, M.; Gayno, G.; Wegiel, J.; Cuenca, R.H. Implementation and verification of the unified NOAH land surface model in the WRF model. In Proceedings of the 20th Conference on Weather Analysis and Forecasting/16th Conference on Numerical Weather Prediction, Seattle, WA, USA, 10 January 2004; 14.2a. Available online: https://ams.confex.com/ams/84Annual/techprogram/paper_69061.htm (accessed on 25 July 2022).
- Sun, J.; Wang, H.; Tong, W.; Zhang, Y.; Lin, C.Y.; Xu, D. Comparison of the Impacts of Momentum Control Variables on High-ResolutionVariational Data Assimilation and Precipitation Forecasting. Mon. Wea. Rev. 2016, 144, 149–169. [Google Scholar] [CrossRef]
- Stoelinga, M.T.; Warner, T.T. Nonhydrostatic, mesobeta-scale model simulations of cloud ceiling and visibility for an East Coast winter precipitation event. J. Appl. Meteor. 1999, 38, 385–403. [Google Scholar] [CrossRef]
- Kunkel, B. Parameterization of droplet terminal velocity and extinction coefficient in fog models. J. Climate Appl. Meteor. 1984, 23, 34–41. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, S. Assimilation of Doppler Radar radial velocity in Yellow Sea fog numerical modeling. J. Ocean Univ. China 2016, 46, 1–12. [Google Scholar] [CrossRef]
- Zhou, B.; Du, J.; Gultepe, I.; Dimego, G. Forecast of low visibility and fog from NCEP: Current status and efforts. Pure Appl. Geophys. 2011, 169, 895–909. [Google Scholar] [CrossRef]
- Cho, Y.K.; Kim, M.O.; Kim, B.C. Sea fog around the Korean Peninsula. J. Appl. Meteorol. 2000, 39, 2473–2479. [Google Scholar] [CrossRef]
- Renshaw, R.; Francis, P.N. Variational assimilation of cloud fraction in the operational Met Office Unified Model. Q. J. R. Meteorol. Soc. 2011, 137, 1963–1974. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | If Assimilating Satellite-Derived Humidity | B Type for Satellite-Derived Humidity Assimilation |
|---|---|---|
| noMT | No | — |
| Q_full | Yes | Full-B |
| Q_fog | Yes | Fog-B |
| Experiment | FBIAS | ETS | ETS Improvements (%) | |
|---|---|---|---|---|
| Q_Full | Q_Fog | |||
| noMT | 0.387 | 0.249 | 37.80% | 91.6% # |
| Q_full | 1.678 | 0.343 | — | 39.1% # |
| Q_fog | 1.383 | 0.477 | — | — |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Gao, S.; Wang, Y.; Shi, H. Impact of Feature-Dependent Static Background Error Covariances for Satellite-Derived Humidity Assimilation on Analyses and Forecasts of Multiple Sea Fog Cases over the Yellow Sea. Remote Sens. 2022, 14, 4537. https://doi.org/10.3390/rs14184537
Yang Y, Gao S, Wang Y, Shi H. Impact of Feature-Dependent Static Background Error Covariances for Satellite-Derived Humidity Assimilation on Analyses and Forecasts of Multiple Sea Fog Cases over the Yellow Sea. Remote Sensing. 2022; 14(18):4537. https://doi.org/10.3390/rs14184537
Chicago/Turabian StyleYang, Yue, Shanhong Gao, Yongming Wang, and Hao Shi. 2022. "Impact of Feature-Dependent Static Background Error Covariances for Satellite-Derived Humidity Assimilation on Analyses and Forecasts of Multiple Sea Fog Cases over the Yellow Sea" Remote Sensing 14, no. 18: 4537. https://doi.org/10.3390/rs14184537
APA StyleYang, Y., Gao, S., Wang, Y., & Shi, H. (2022). Impact of Feature-Dependent Static Background Error Covariances for Satellite-Derived Humidity Assimilation on Analyses and Forecasts of Multiple Sea Fog Cases over the Yellow Sea. Remote Sensing, 14(18), 4537. https://doi.org/10.3390/rs14184537