1. Introduction
Sea surface salinity (SSS) influences ocean-atmosphere interactions which control weather and climate patterns. Understanding ocean-atmosphere interactions in the western tropical Atlantic is essential to the development of new parameterizations schemes for numerical weather prediction (NWP) and climate models [
1] that support forecasting over this region. The need to improve weather and climate prediction models over this region is driven by the fact that many Caribbean Small Island Developing States (SIDS) located in the region heavily utilize NWPs to support severe weather forecasting as part of their multi-hazard early warning system and climate models to drive their climate change adaptation policies and programmes.
Studies have shown that salinity stratification as a result of riverine outflows from large South American river systems, in particular the Amazon River system, that make their way into the Northern Atlantic Ocean, reduce upper ocean cooling during hurricane passage supporting hurricane intensification [
2,
3]. SSS modulates both vertical mixing and Sea Surface Temperature (SST) [
1]. The Barrier Layer (BL) produced as a result of freshwater influxes may produce biases in SST by controlling vertical mixing and entrainment of cooler water into the Ocean Mixed Layer (OML) [
4]. The freshwater fluxes described also carry nutrients and organic matter which can produce ecological challenges that impact fisheries, marine biodiversity and tourism [
5].
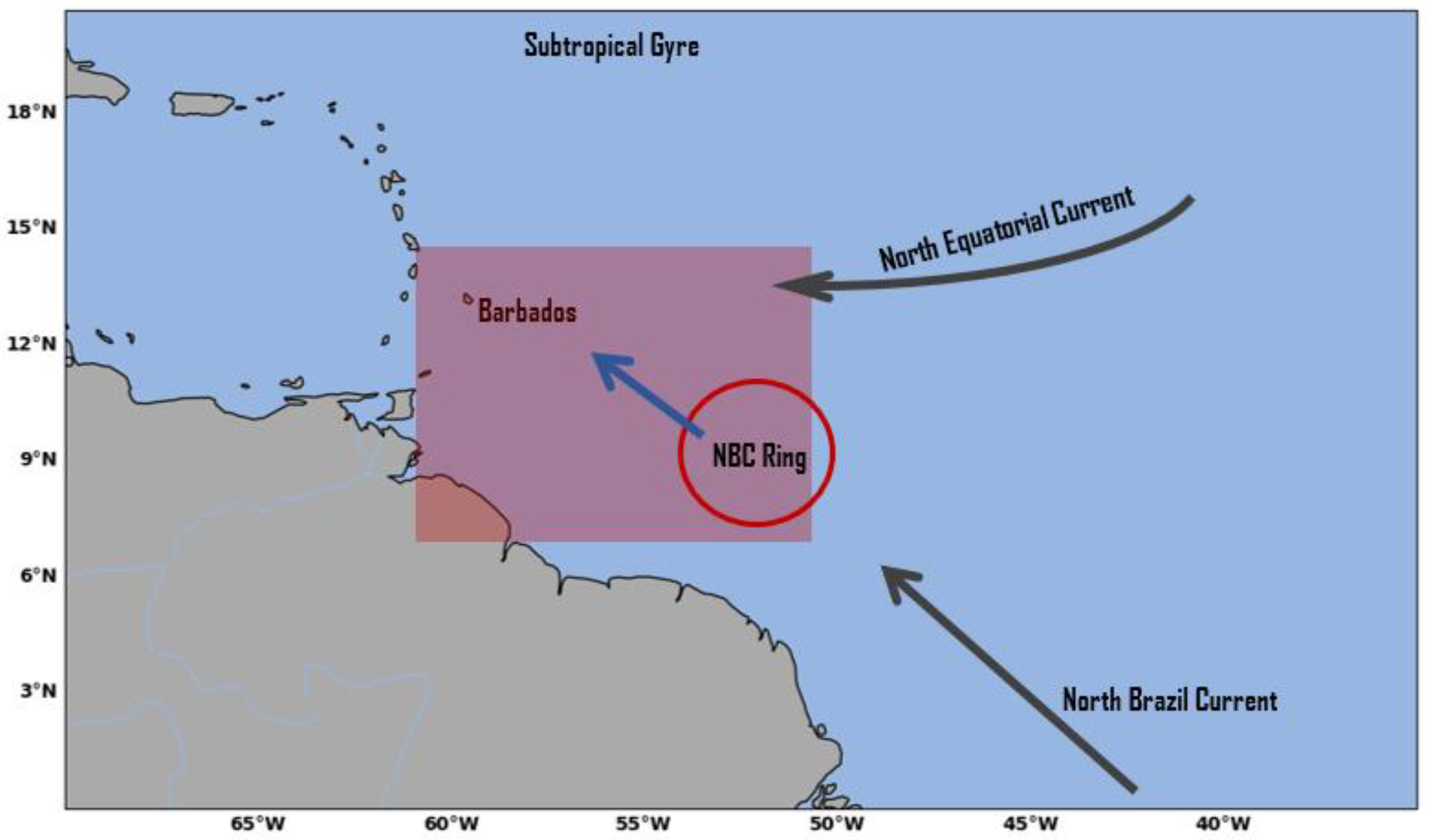
Observations of ocean salinity and density provide information on ocean dynamics especially in areas with complex ocean processes such as the North Brazil Current (NBC) region [
6,
7,
8]. Salinity variations provide insight into ocean circulation and air sea fluxes which in turn impact the atmospheric boundary layer, resulting in changes to the Earth’s climate [
9]. Salinity is also used for monitoring the movements of water masses along with vertical exchange of water between surface and subsurface layers [
10]. Historically, in situ measurements of salinity and temperature were taken from ships using bucket and thermosalinograph (TSG) measurements and were sparse on a global scale [
11]. This improved over time with the implementation of the Argo Float programme, which included in situ observations of salinity [
12]. This global network, consisting of autonomous Argo Profiling floats produces 3° spatial resolution salinity data at 10-day intervals. Although useful for many applications, these spatial and temporal resolutions are too coarse to provide useful salinity observations at the mesoscale level [
13].
In 2010, the first global satellite ocean salinity measurements became available from the European Space Agency’s (ESA) Soil Moisture and Ocean Salinity (SMOS) mission, which retrieved salinity at a spatial resolution of 40 km and a 23-day repeat cycle. In 2011, National Aeronautics and Space Administration’s (NASA) Aquarius mission began providing salinity at a spatial resolution of 100 km and a 7-day repeat cycle [
14]. This was followed by NASA’s Soil Moisture Active Passive (SMAP) mission in 2015, which has a resolution of 40 km and a repeat cycle of 8 days [
15]. Although space-based platforms improved the acquisition of salinity data, there are still inaccuracies when making measurements near to the coast and at high latitudes, due to limitations of the L-band microwave radiometers used to measure salinity [
16].
Ocean modelling provides another approach for estimating global ocean salinity. Ocean modelling commenced in the 1960s with the development of simple ocean circulation models [
17]. These older models were incapable of simulating ocean processes at spatial resolutions finer than 100 km and many typically had temporal resolutions of approximately three months. However, improvements over the years have led to the development of models capable of simulating submesoscale ocean behavior. The accuracy of an ocean simulation model depends on how well the model represents ocean dynamics, the quantity and quality of input data as well as its ability to simulate air sea interactions among other things [
18].
The HYbrid Coordinate Ocean Model (HYCOM) (
https://hycom.org, accessed on 17 September 2021), used in this study, assimilates Argo float and Conductivity, Temperature and Depth (CTD) data for its salinity estimates. HYCOM has exhibited large errors near river discharge areas in the tropics and in boundary currents such as the Brazil-Mailvinas confluence and the Gulf Stream [
19]. These errors may make the model a less than ideal choice for estimating SSS values in tropical discharge regions. Saildrone data can provide vital information regarding the extent of these errors in these locations and aid in the improvement of model output. Contemporary, high resolution in situ observations by saildrone uncrewed vehicles can resolve mesoscale and submesoscale variability observed in coastal regions and remain accurate at high latitudes, providing valuable data for process studies and validation of the satellite measurements [
20].
The ‘Elucidating the role of clouds- circulation coupling in climate-Ocean-Atmosphere component’ (EUREC
4A-OA) and the ‘Atlantic Tradewind Ocean-Atmosphere Mesoscale Interaction Campaign’ (ATOMIC, US) campaigns resulted in an unmatched observing effort in the western tropical Atlantic. In this campaign, three autonomous saildrone vehicles collected data over a 45-day period in regions east of Barbados (
Figure 1). SSS collected by the saildrones during the campaign are used to assess the validity of SSS data retrieved from satellites and HYCOM products. Satellite SSS products as well as HYCOM model outputs are used extensively in areas that are lacking in situ measurements such as the region where the North Brazil Current occurs. Furthermore, HYCOM outputs are used as reference salinity fields for the calibration in SMAP products [
21,
22].
This study validates SMAP SSS products at both 70 km and 40 km resolution as well as the HYCOM estimated SSS in the Western Tropical Atlantic. The validation is carried out using saildrone SSS data collected during the 45-day EUREC
4A-OA/ATOMIC campaign. The paper is presented in the following manner.
Section 2 introduces the EUREC
4A campaign and the marine data collection platforms, the SMAP products, HYCOM and their respective datasets collocation and validation methodologies.
Section 3 presents the results of the comparison between the satellite products, HYCOM, and saildrones datasets. Additionally,
Section 3 highlights the investigation of a fresh tongue encountered during the campaign. Finally, the results are discussed in
Section 4.
2. Data and Methods
2.1. EUREC4A Campaign
The EUREC
4A campaign was a cloud- and climate-focused undertaking, seeking to measure microphysical properties of trade-wind cumuli as a function of the large-scale environment and provide benchmark data for future satellite and modelling efforts [
23,
24]. Initially, a Caribbean-French-German partnership, the EUREC
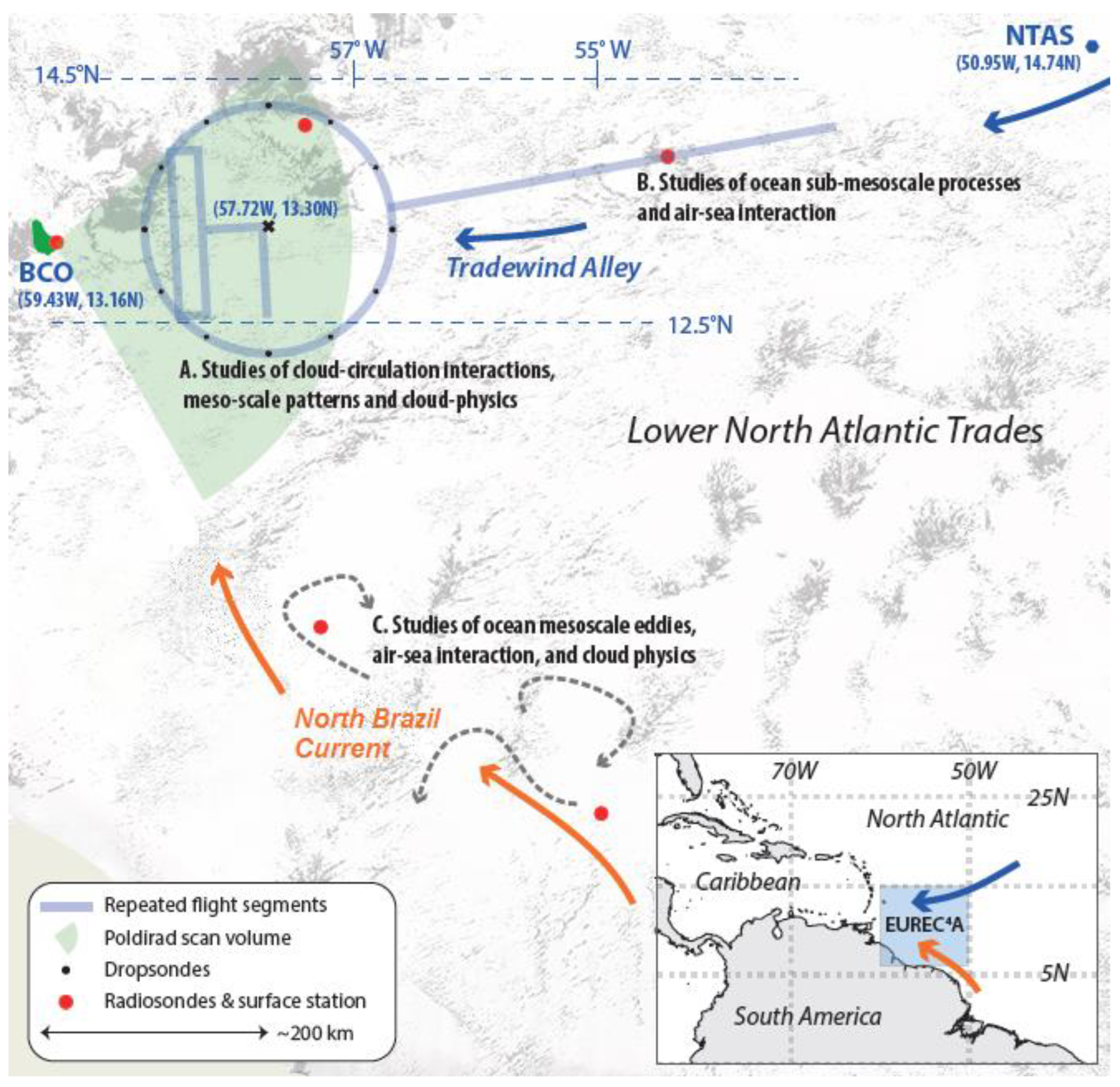
4A campaign, operated eastward of the island of Barbados in the lower Atlantic trades (
Figure 2) and incorporated the Barbados Cloud Observatory (BCO), along with aircraft, research vessels, buoys and drifters. Surface level observations carried out by the research vessel Meteor and the BCO would serve to complement the airborne measurements within the ‘EUREC
4A-Circle’ (Study area A east of Barbados where the HALO (High Altitude and Long Range Research Aircraft) would circle in range of the land-based radar PoldiRad (Polarization Diversity Doppler Radar),
Figure 2) characterizing the atmospheric environment from the surface to provide full measurement coverage of the atmospheric column.
EUREC
4A’s aim eventually expanded to include the examination of how air–sea interaction is influenced by mesoscale eddies, sub-mesoscale fronts and filaments in the vicinity of the NBC [
23]. Collaboration between the Ocean Atmosphere component of EUREC
4A (EUREC
4A-OA) and the ATOMIC campaign led to the inclusion of three additional research vessels (R/Vs): L’Atalante, Maria S. Merian and Ronald H. Brown. These vessels were fitted with instrumentation to measure both the atmosphere and the upper kilometer of the subsurface water column. Measurements from autonomous vehicles including ocean gliders, drifters, floats and saildrones were used to supplement measurements directly from the research vessels. More details of the motivations, the wide range of measurement platforms and instrumentations involved in the EUREC
4A campaign can be read at Stevens et al. [
23].
2.2. Saildrone
Saildrones are zero-emission, solar powered, wind propelled marine vehicles produced by Saildrone Inc. with science-grade instrumentation. They have 12 sensors to measure data at the air–sea interface (e.g., SSS, SST, air temperature, 3D winds) and can carry one additional sensor on the keel (either an Acoustic Doppler Current Profiler (ADCP) or scientific echo-sounders). A Global Positioning System (GPS) and an onboard computer enables the vehicles to navigate following prescribed waypoints, while staying within a set corridor, taking winds and currents into consideration autonomously. Waypoints can be dynamically updated as environmental conditions change or interesting features develop. Vehicles are controlled and data transferred in near-real-time via two-way Iridium satellite communications. Saildrones can travel approximately 100 km per day, depending on wind speed, and can operate in remote regions where research vessels may be time- and cost-prohibitive. During the EUREC4A-OA/ATOMIC cruise, each saildrone vehicle measured salinity via the SeaBird-37-SMP-ODO Microcat and RBR CTD/ODO/Chl-A instruments at 0.5 m depth for 12 s, each minute.
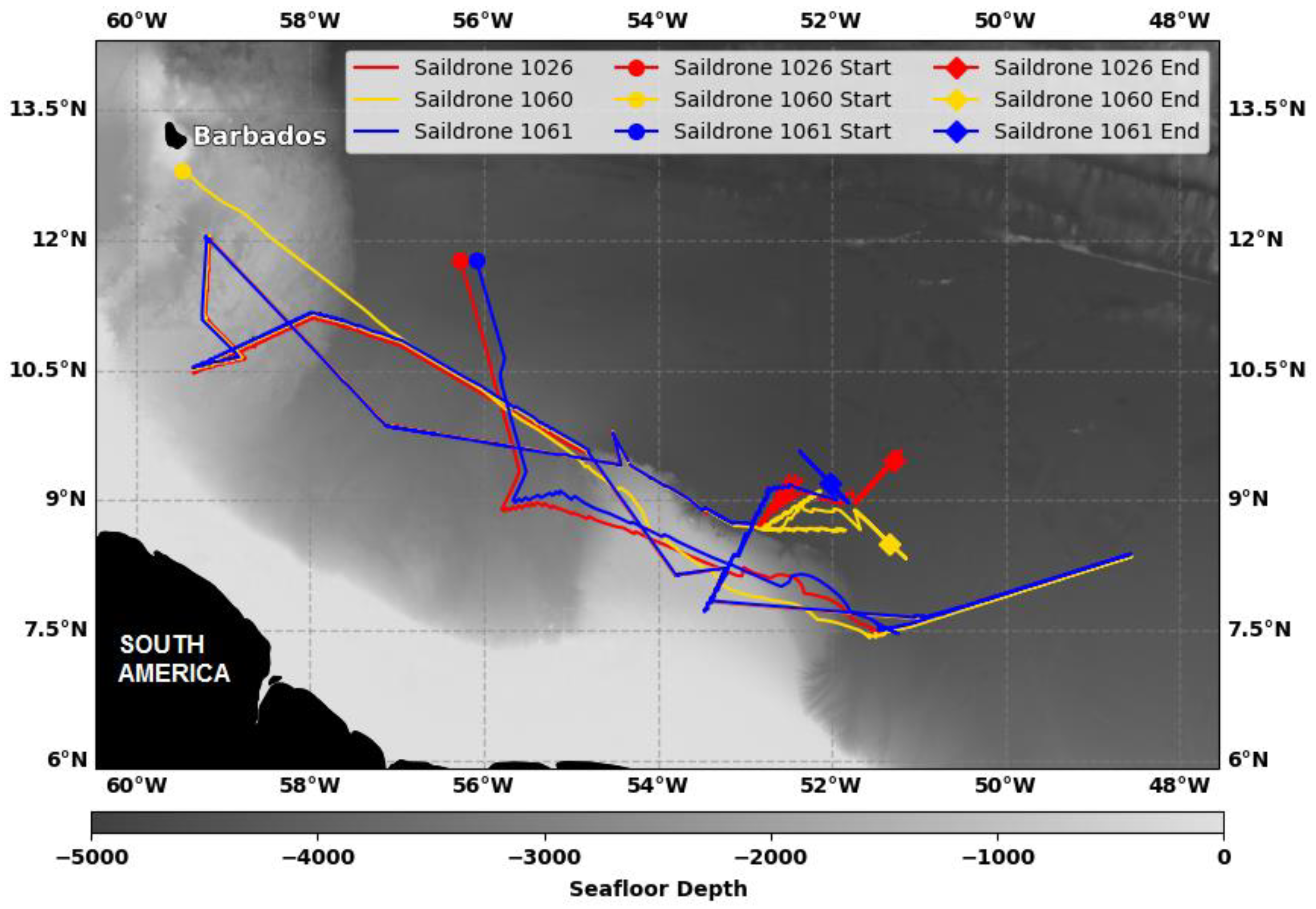
This study analyzed saildrone data from the three NASA-funded saildrones (SD1026, SD1060 and SD1061) deployed during the EUREC
4A-OA/ATOMIC campaign, which operated during the period 17 January–2 March 2020 within the domain 7–13.5°N and 48–60°W (
Figure 3).
The saildrone data files collected at a 1 min temporal resolution over the duration of the measurement period include platform telemetry and near-surface observational data (see
https://podaac.jpl.nasa.gov/dataset/SAILDRONE_ATOMIC, accessed on 30 April 2021). The utilization of the saildrone platform represents a new and evolving trend in scientific sampling campaigns in which the data collection platform and process are subcontracted to Saildrone Inc. who is responsible for executing the experiment design and assuring the quality of the data. Hence, it is important to independently assess the accuracy of the data provided by the Saildrone operators.
Preceding the EUREC
4A-OA/ATOMIC campaign, saildrone-measured SSS data were validated in polar latitudes during the Innovative Technology for Arctic Exploration (ITAE) by Cokelet et al. [
25] and in the tropics during the Salinity Process in the Upper-ocean Regional Study 2 (SPURS-2) campaign in 2017 [
26]. SSS for the saildrones during the polar and tropical campaign had a root mean squared difference (RMSD) of 0.01 and 0.0075 practical salinity unit (psu), respectively.
Similar to our current study, SSS and SST data from saildrones were used to validate SMAP satellite derived SSS and SST datasets during a 2018 Baja California campaign. Much like the NBC region in the present study, the California current system is dominated by submesoscale and mesoscale variability. Vazquez-Cuervo et al. [
20] found that saildrone SSS showed fresher biases compared to the SMAP products.
2.3. The Soil Moisture Active Passive (SMAP) Data
The SMAP mission is a polar orbiting, remote sensing observatory developed by the NASA primarily for soil moisture mapping. SMAP uses an L-band radar and radiometer with central frequencies of 1.26 GHz and 1.41 GHz, respectively. SMAP primarily detects brightness temperature, which is then converted to soil moisture on land and SSS in the ocean due to the L-band microwave’s sensitivity to salinity. SMAP data is independently processed by the NASA Jet Propulsion Laboratory (JPL) and the Remote Sensing System (RSS). Both data providers produce Level-2 (L2) data, which contain data from a single orbit of the satellite (orbital data), and Level-3 (L3) data which are 8-day averages of SMAP salinity data. This study uses SMAP JPL version 5, L2 and L3 data at a spatial resolution of 60 km from 17 January to 2 March 2020 and SMAP RSS version 4, L2 and L3 at two spatial resolutions: 40 km, hereafter referred to as RSS40, and 70 km, hereafter referred to as RSS70 for the same time period.
The JPL and RSS data products use different retrieval algorithms to generate SSS satellite data. Additional variations include corrections, flags, filters, masks as well as approaches to error and uncertainty estimation. The JPL product includes a land correction algorithm which uses a look up table and ‘land-near climatology’ to correct brightness temperature. JPL produces a 60 km product and its algorithm retrieves SSS within 35 km from the land wherever sea ice concentration values are less than 3% [
27]. Version 4.0 of SMAP RSS mitigates land intrusion using simulated Aquarius and SMAP observations. RSS’s method allows retrievals within 30–40 km from land. RSS produces both a 40 and 70 km SSS product; however, salinity retrievals degrade within 500 km of land [
22]. The SSS 70 km product is often used as it is significantly less noisy than the 40 km data [
22].
The JPL SSS product has been validated extensively and has shown good accuracy in validations carried out by other studies [
28,
29,
30]. Tang [
31] validated the SMAP JPL L3 SSS product using in situ data obtained from Argo floats, moored buoys and TSG. The results had a margin of error within 0.2 psu for the zonal band between 40°N and 40°S. Bao [
13] investigated the accuracy of three L3 salinity products including the SMAP RSS and observed that SMAP RSS was positively biased in the tropics. Qin et al. [
32] found in their evaluation of RSS SSS that undetected precipitation and strong winds biases SSS measurements. Fournier et al. [
30] analyzed the performance of two satellite SSS products (including SMAP RSS) and found that close to the Amazon River RSS SSS products not only captured the full spatial extent of the plume during peak discharge consistently, but also the salinity gradients [
30].
2.4. Hybrid Coordinate Ocean Model (HYCOM)
HYCOM is an assimilated model which, through the three-dimensional variational Navy Coupled Ocean Data Assimilation (NCODA) system, incorporates satellite observations as well as Argo float, CTD and Expendable Bathythermograph (XBT) measurements to forecast ocean variables such as salinity, currents and temperature among others [
33]. The U.S. Navy uses HYCOM on a daily basis as part of their Global Ocean Forecasting System (GOFS) as does the National Oceanic and Atmospheric Administration (NOAA) at the National Centers for Environmental Prediction (NCEP) [
33]. The HYCOM data used in this study is from GOFS 3.1 and experiment 93.0, which has a 0.08° spatial resolution and a 3 h temporal resolution. In GOFS 3.1, SSS is initialised using climatology from the Generalized Digital Environmental Model (GDEM4). In-model relaxation to GDEM4 climatology occurs at locations where the model salinity values have a less than 0.5 psu difference from climatology salinity values. This is intended to improve model SSS calculations at river outflow areas [
34].
NCODA runs on a regular basis at the Fleet Numerical Meteorology and Oceanography Center (FNMOC) as well as at the Naval Oceanographic Office (NAVOCEANO) and it supplies HYCOM with input parameters for SSS, SST and currents [
19]. To do this, ocean observations are compiled and put through specific quality control methods. The quality-controlled data are then ingested by NCODA, which is run with data from the previous HYCOM forecast. The updated NCODA output is then used to initialize the final HYCOM simulation. HYCOM’s fine resolution accurately resolves mesoscale ocean behavior and fast flowing western boundary currents [
18]. These elements have made the model one of the favored choices for researchers to examine freshwater fluxes and salinity budgets [
35] and to validate satellite salinity retrievals [
14,
21]. Due to the inability of Argo floats (one of the model’s main sources of in situ data acquisition) to record measurements at areas close to land, HYCOM may have an issue recognizing freshwater discharge in these locations [
21]. Overestimations of salinity by HYCOM in certain areas may also be due to deficiencies in the climatological forcing of the model, specifically in its ability to represent freshwater fluxes in its output [
35,
36].
2.5. Collocation and Validation Methodology
All (RSS70, RSS40, JPL and HYCOM) salinity datasets were collocated with saildrone observations. Data collocations were made using Xarray’s interp method for multidimensional interpolation of variables [
37]. The Xarray nearest-neighbour interpolation routine was used to match the locations and times of the saildrone product with the nearest location and time available in the averaged model and satellite salinity products. Only collocations within 24 h and 25 km were included, and the closest points in space were collocated before the closest points in time.
For the SMAP datasets, the L2 orbital data were collocated with the saildrone data using the Pyresample kd-tree resample_nearest method and SciPy spatial kd-tree method for quick nearest-neighbour lookup [
38,
39]. The multiple saildrone data points that matched with a unique SMAP observation were averaged to a single saildrone observation, providing a single collocation matchup. To compare the HYCOM model and SMAP data to the saildrone observations, the standard deviation of the difference (STD), the mean difference and the Spearman correlation coefficient between observed (saildrone) and each of the estimated (HYCOM, JPL, RSS40, and RSS70) salinity products were calculated. The L2 JPL and RSS datasets were preferred for statistical comparison to the saildrone data since these datasets have minimal spatial and temporal averaging as compared to the L3 datasets. Therefore, the analysis presented in the discussion uses the L2 datasets (
Section 4).
4. Discussion
The EUREC
4A-OA/ATOMIC campaign highlighted the effectiveness of the saildrones in measuring SSS across the tropical North Atlantic Ocean. Saildrones were directed to areas of significant interest in the NBC region and were able to provide exceptionally high spatial and temporal resolution data. The high quality of the data was reflected in the low RMSE values produced during the comparison of duplicate sensors on each saildrone (
Table 1). The saildrones also augmented the near surface data collected by the four research vessels that took part in the campaign as they generally start observations about 5–7 m above and below the sea surface [
41]. A few months after the campaign, the shutdowns associated with the COVID-19 pandemic restricted field campaigns including ship-based research activities. As a result, remotely piloted or autonomous data collection platforms, such as saildrone, have become increasingly valuable given their remote operation and their ability to continuously collect in situ data over periods extending from months to years. The aforementioned benefits of the saildrones made them ideal candidates for collecting data to validate the satellite-derived marine products.
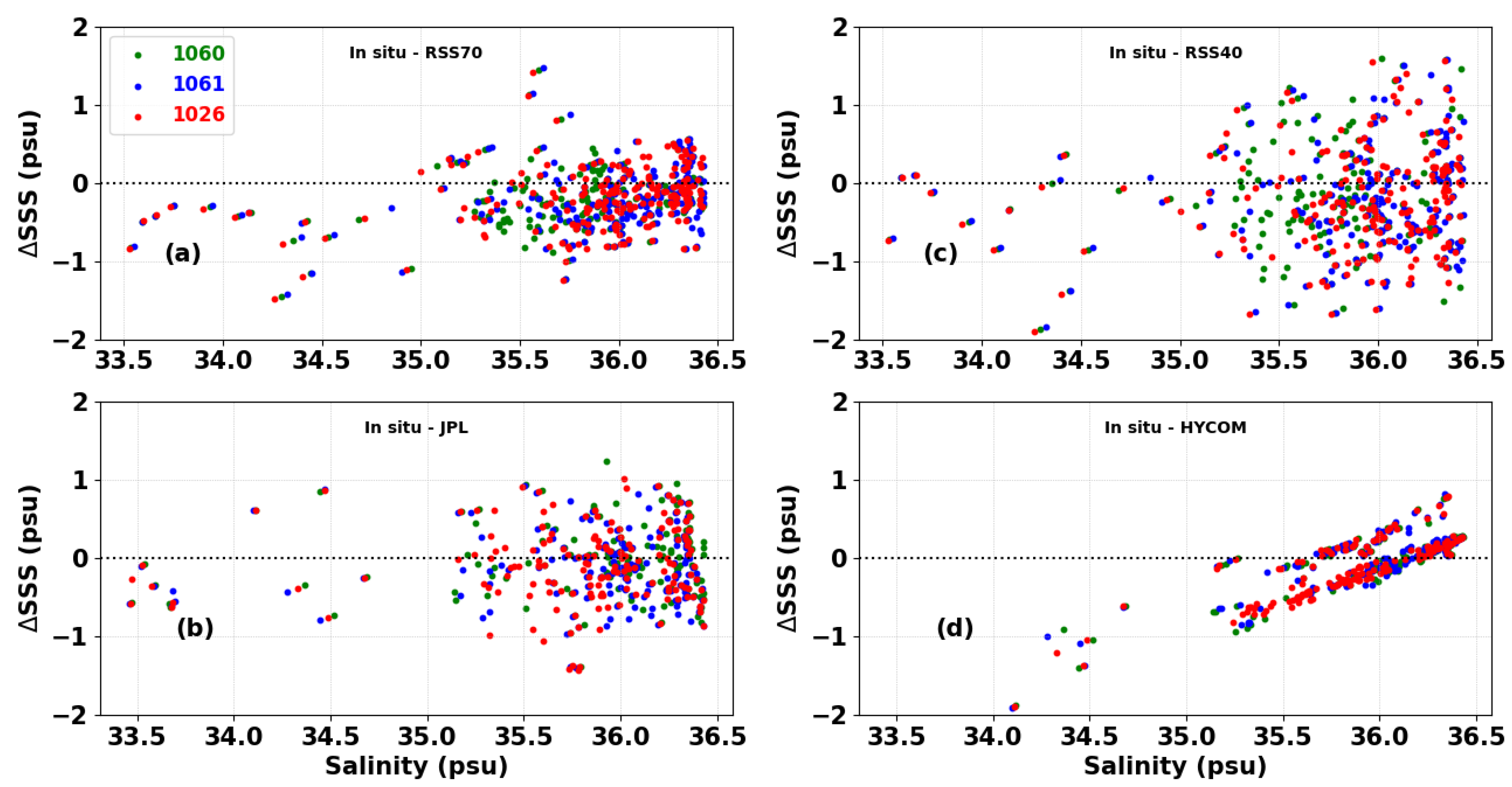
In this study, SSS from three saildrone vehicles were used to assess the quality of satellite and ocean model data. The differences seen in
Table 2 show that the RSS70 and JPL estimates were more closely correlated to the saildrone data than equivalent HYCOM and RSS40 products and the STD values indicate that the RSS70 SSS may have been most accurate to the saildrone data [
22]. The RSS40 data was the noisiest out of all four platforms and this high noise content was represented by its STD values and Spearman correlation values. This noise is most likely due to reduced spatial smoothing. However, some of this noise could be groundwater discharges and other land-based discharges from small river systems which are not visible in the lower resolution RSS70 and JPL output.
These results suggest that for most applications, the RSS70 data should be preferred to RSS40, which is in agreement with previous validation papers [
20,
42]. There also appears to be a correlation between the spatial resolution of the SMAP satellite and the precision of its salinity estimates. It was found that the satellites with coarser resolutions (JPL at 60 km resolution and RSS70 at 70 km resolution) and less noise resulted in more accurate output. Additionally, the mean difference values from all saildrones minus satellite/model values showed that SMAP and HYCOM overall tended to record more saline conditions than the saildrones.
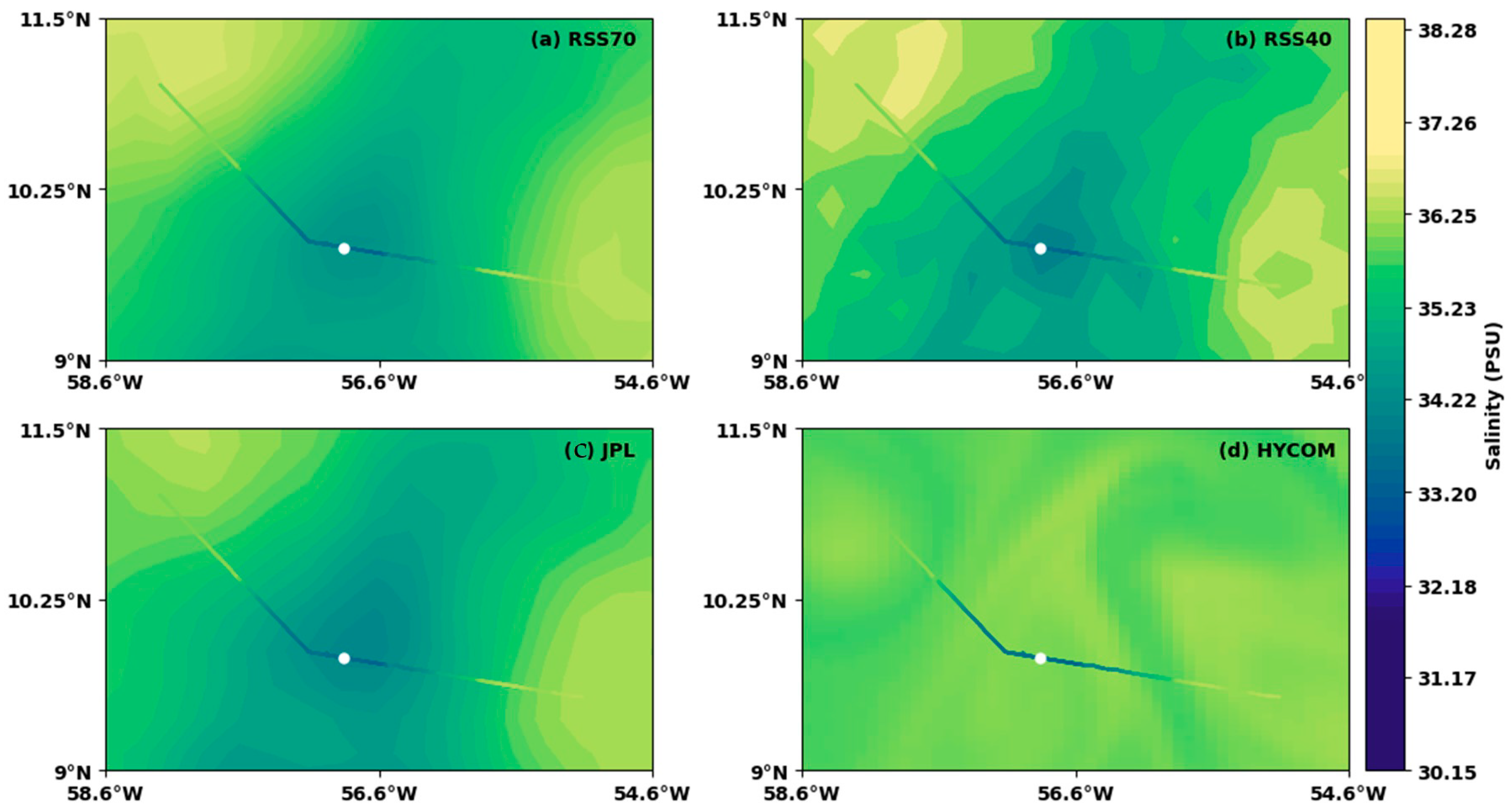
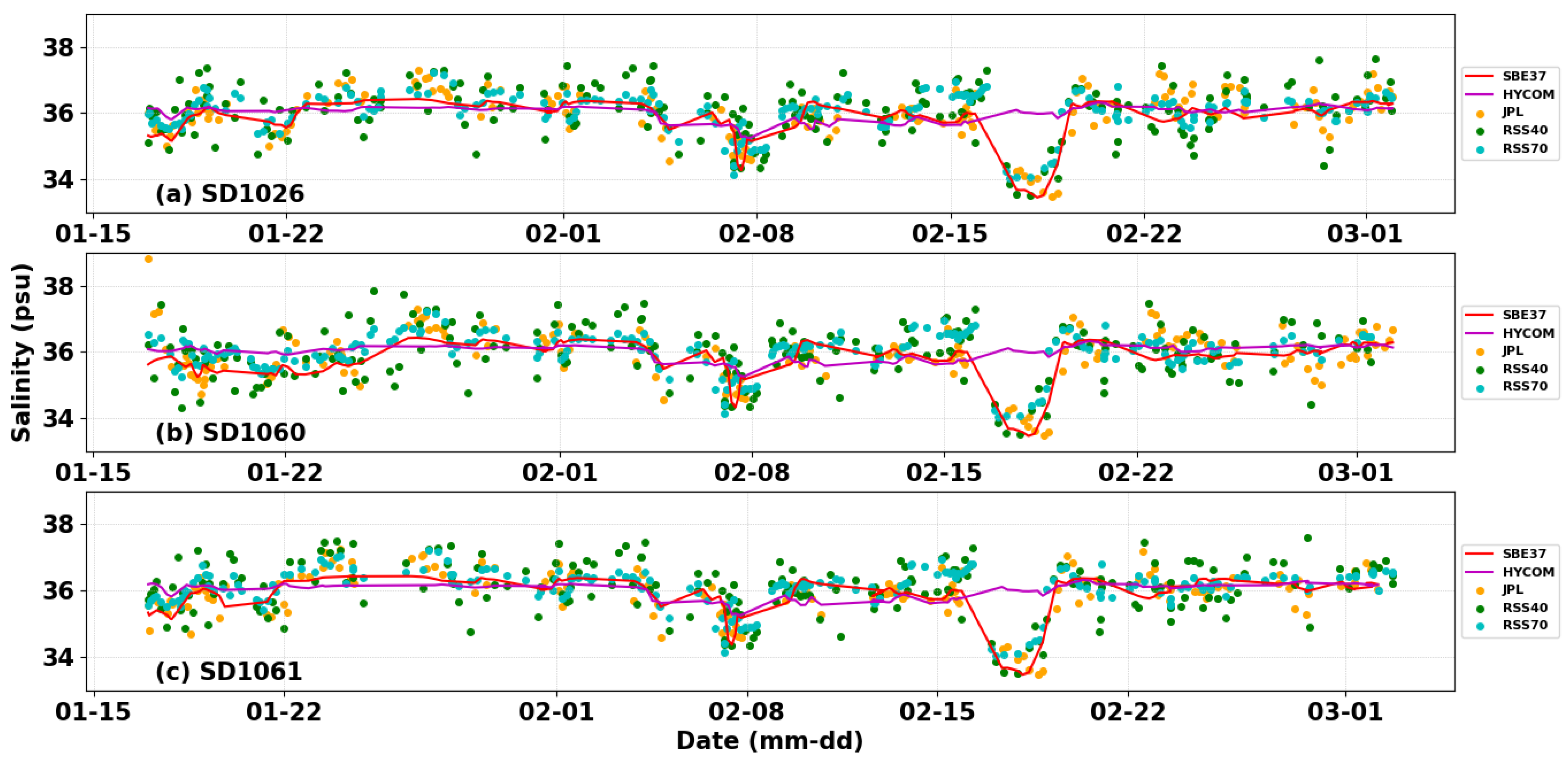
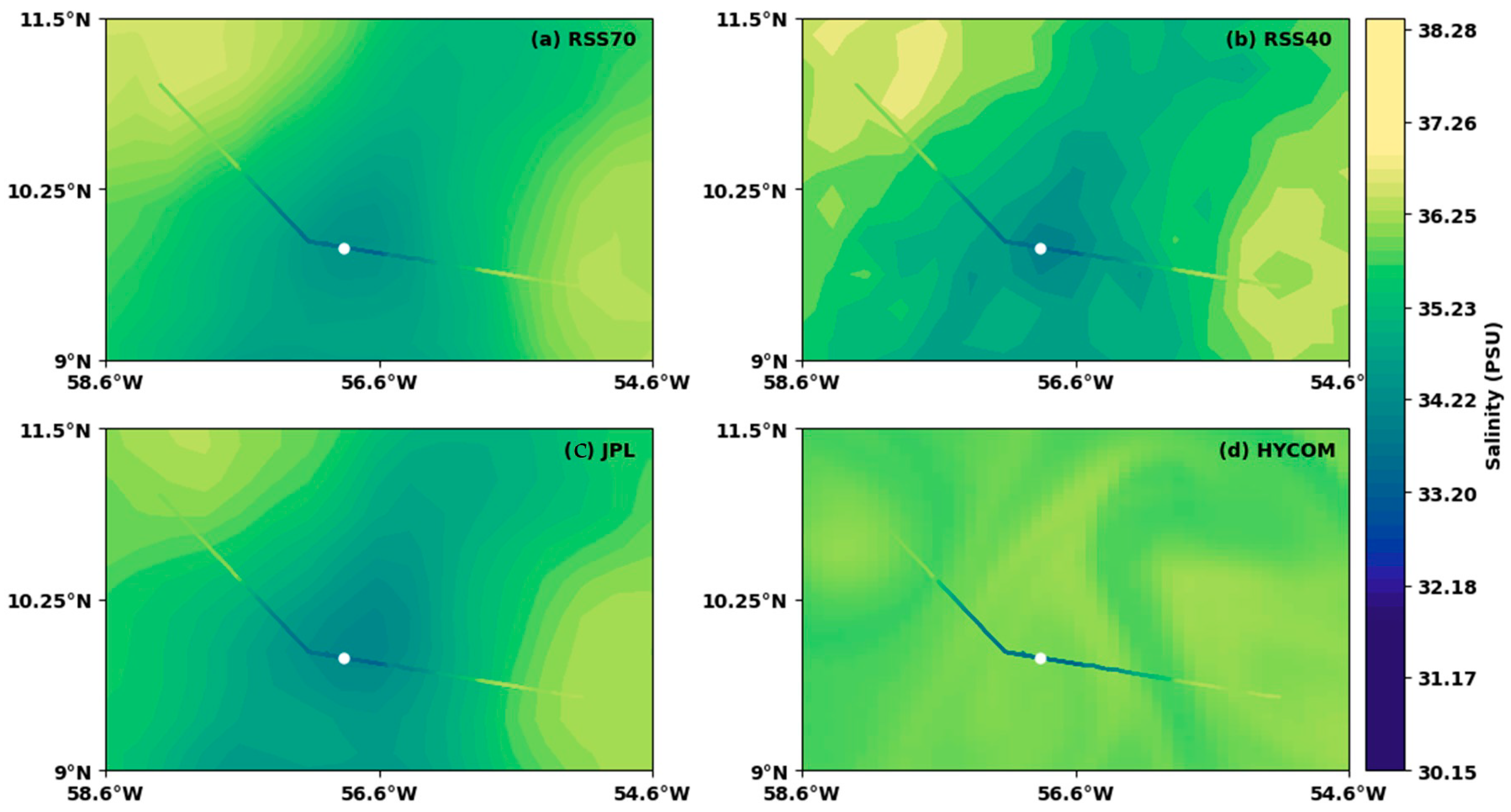
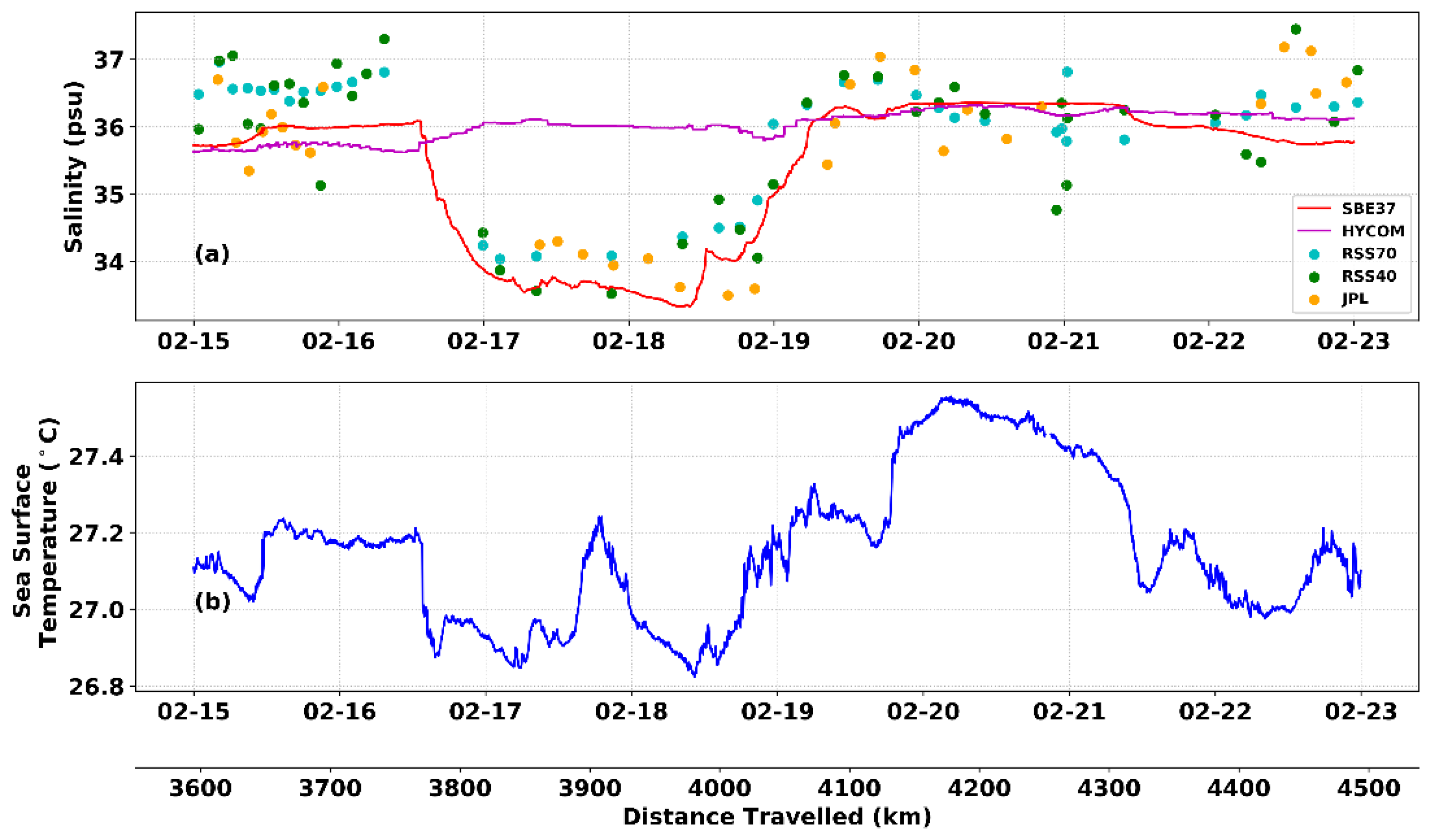
The most prominent feature to occur over the course of the saildrone cruise was the salinity minimum experienced during 16–19 February 2020. This sharp drop in salinity was spatially visualized in
Figure 6 to examine how well the SMAP products reproduce the saildrone data. The fresh tongue was adequately displayed by the JPL and RSS products, showcasing the products’ ability to resolve fresh mesoscale features. The RSS40 produced the most accurate salinity data inside the fresh tongue. It was the only product that was able to depict the sharpest rise in salinity inside the fresh tongue, which is presumably because it has the highest spatial resolution of the satellite datasets. This lines up with Meissner et al. [
22], where one of the suggested applications of RSS40 are areas of freshening events of the surface layer of the ocean. Thus, RSS40 may be suitable for investigating small scale salinity anomalies, but RSS70 should be the preferred datasets for most ocean salinity research and investigation in the western Tropical Atlantic [
22]. Due to the in-model climatological relaxation which results in smooth data, HYCOM overall appeared to have the least noisy dataset. It also had several measurements in good agreement with the saildrone, but it failed to reproduce the fresh tongue. This is most likely due to an underestimation of the freshwater flux entering the model domain from the Amazon River system. Since the main sources of HYCOM’s assimilated salinity data are not deployed close to land, freshwater discharges from rivers would be underestimated in model. River data, which accounts for freshwater runoff from the Amazon and other river inputs along the South American coastline, are required to improve model performance in the area of the fresh tongue as demonstrated by Coles et al. [
43].
In the Coles et al. [
43] study, HYCOM was initialized using surface forcing from the European Centre for Medium-Range Weather Forecasts (ECMWF) 40-year analysis (1979–1998) and a salinity restoration condition to prevent the model from using its default seasonal salinity cycle. Climatological discharge information from 315 rivers was included as climatological mass flux input and a 17 term empirical equation calculated the near field plume dynamics. In their HYCOM output, Coles et al. relied on the 35 isohaline to identify the Amazon plume. The salinity within their plume remained under 35 psu as the plume moved into the open ocean off the coasts of South America. This is not consistent with the HYCOM SSS variable as
Figure 7 shows the HYCOM variable consistently above 35 psu, indicating the need for specific river input data to produce more accurate river outflow salinity estimates.
SMAP SSS data, which more accurately represented the fresh tongue in this instance, could potentially be incorporated into HYCOM’s data assimilation process to have a more accurate representation of freshwater fluxes in the model. Such an approach has not been described in the literature to our knowledge and represents a promising new area of research that could improve the prediction performance of HYCOM.
5. Conclusions
During the EUREC4A-OA/ATOMIC campaign, saildrones and research vessels were deployed in the North Brazil Current region in order to investigate mesoscale eddies and submesoscale fronts. In this study, saildrone salinity observations recorded during the campaign were compared with four different SSS products SMAP JPL, SMAP RSS 40 km, SMAP RSS 70 km and HYCOM, with the aim of highlighting the strengths and weaknesses of each product and identifying the best product for use in this area. This study represents the first validation of SMAP satellite-derived SSS using the saildrone in the river-influenced Western Tropical Atlantic, and this information can allow researchers to make informed decisions regarding the most ideal product for their application as well as highlight issues to algorithm developers. Overall, it was found that SMAP RSS 70 km outperformed its counterparts. However, SMAP RSS 40 km was better within freshening events such as a fresh tongue, with HYCOM being on the opposite spectrum, failing to identify submesocale features such as the fresh tongue. Akin to the SMAP RSS 70 km, SMAP JPL and HYCOM performed well in areas where the large-scale salinity conditions were constant, but improved input SSS fields may be required for HYCOM to reproduce smaller-scale salinity fluctuations. Finally, the results of this study can aid in the improvement of mesoscale and submesoscale SSS products, which can lead to the refinement of NWP and climate models and therefore to improved weather, ocean and climate forecasts, especially for tropical regions. An increase in SSS observations (e.g., augmented Argo floats or buoys) in the western Tropical Atlantic would allow for improved validation of SMAP and model estimates in this area. The use of the three saildrones for such a short period is insufficient to ascertain all of the SSS complexities in this location.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}