
Mapping a European Spruce Bark Beetle Outbreak Using Sentinel-2 Remote Sensing Data

 , , and
, , and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
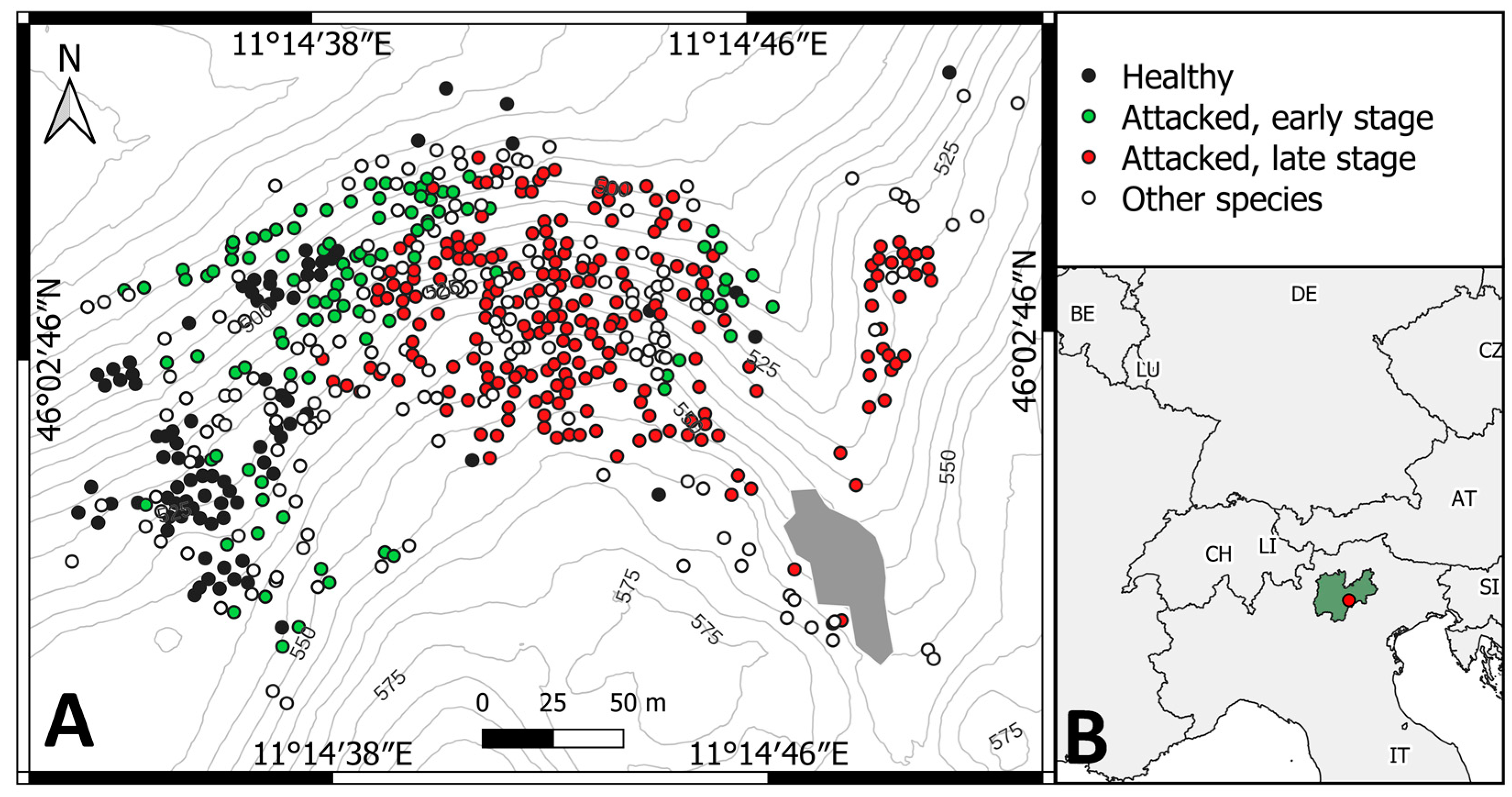
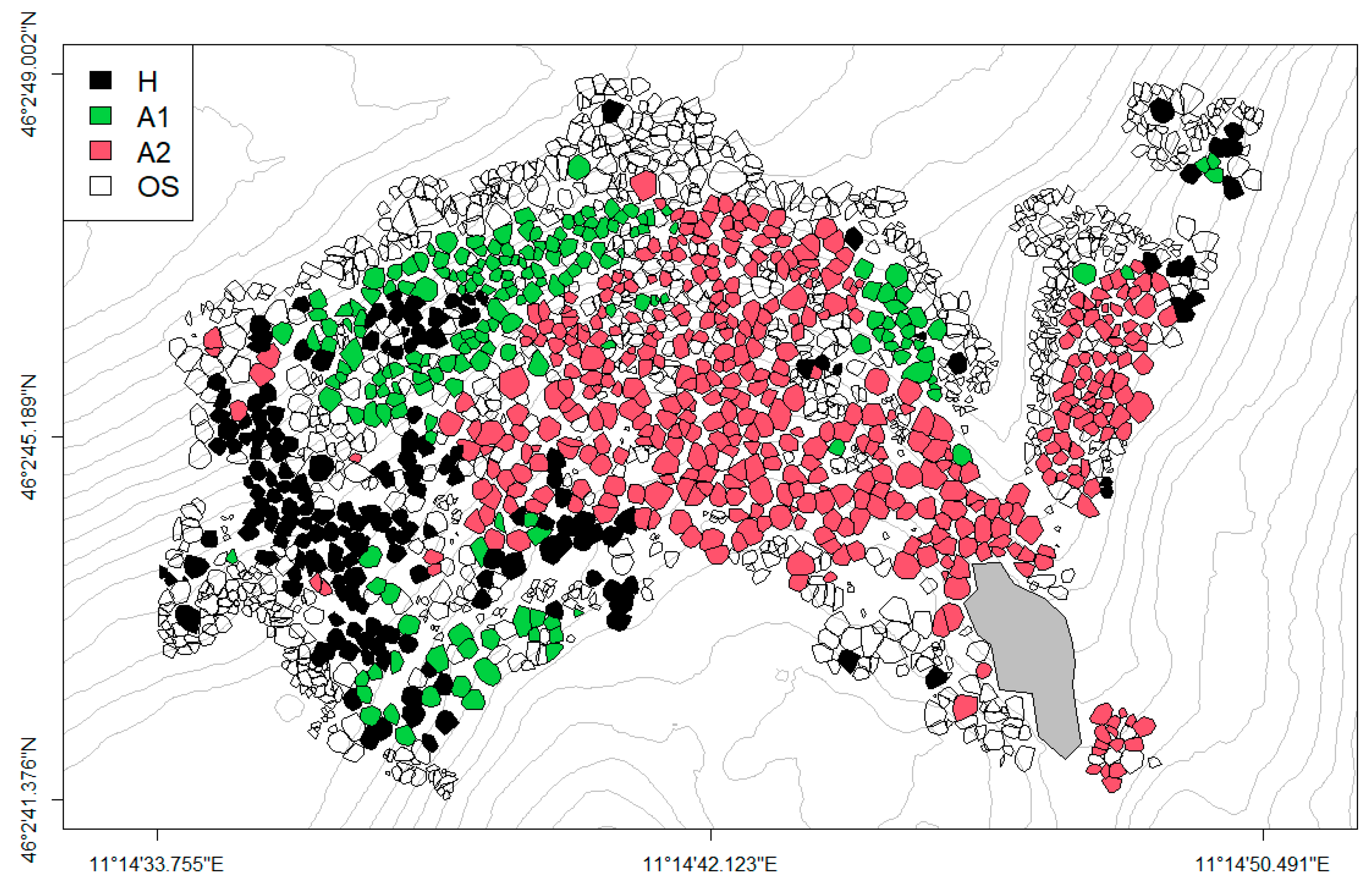
2.1.1. Study Area and Field Data
2.1.2. Remote Sensing Data
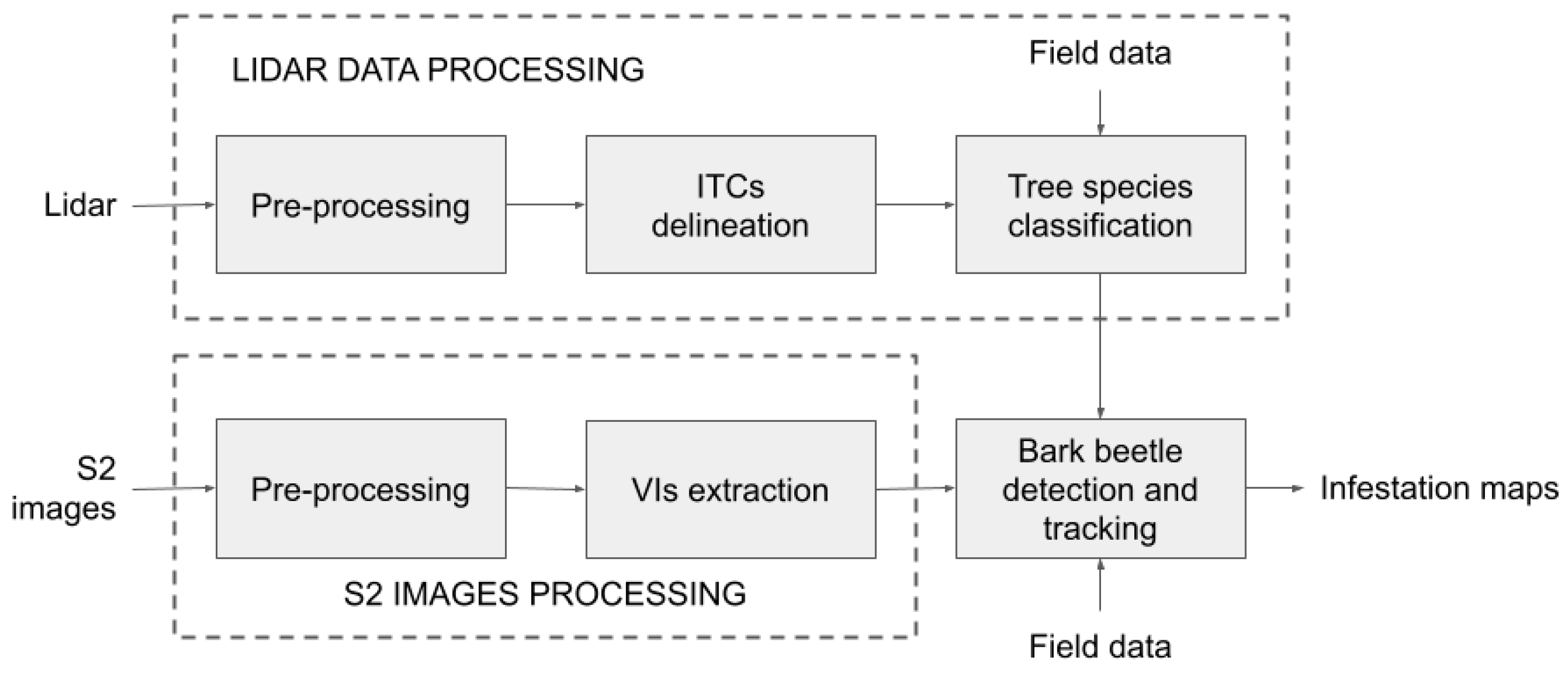
2.2. Methods
2.2.1. Lidar Data Processing
2.2.2. S2 Image Processing
2.2.3. Tree Species Classification and Bark Beetle Detection
2.2.4. Validation of the Classifications
2.2.5. Multitemporal Tracking of the Bark Beetle Infestation
3. Results
3.1. ITC Detection and Tree Species Classification
3.2. Bark Beetle Detection
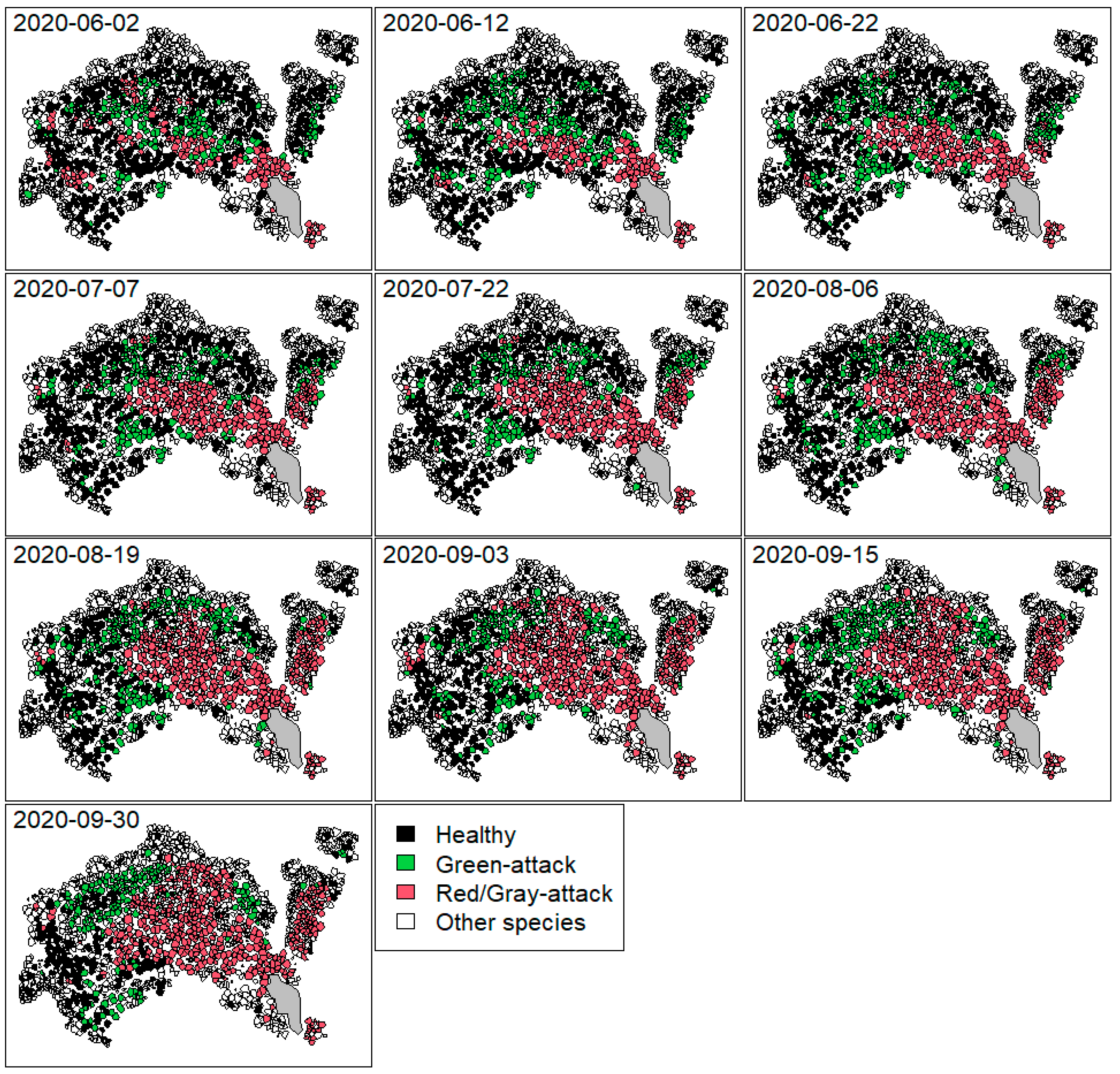
3.3. Mapping Bark Beetle Presence and Tracking it in Time
4. Discussion
4.1. Infestation Detection at ITCs Level
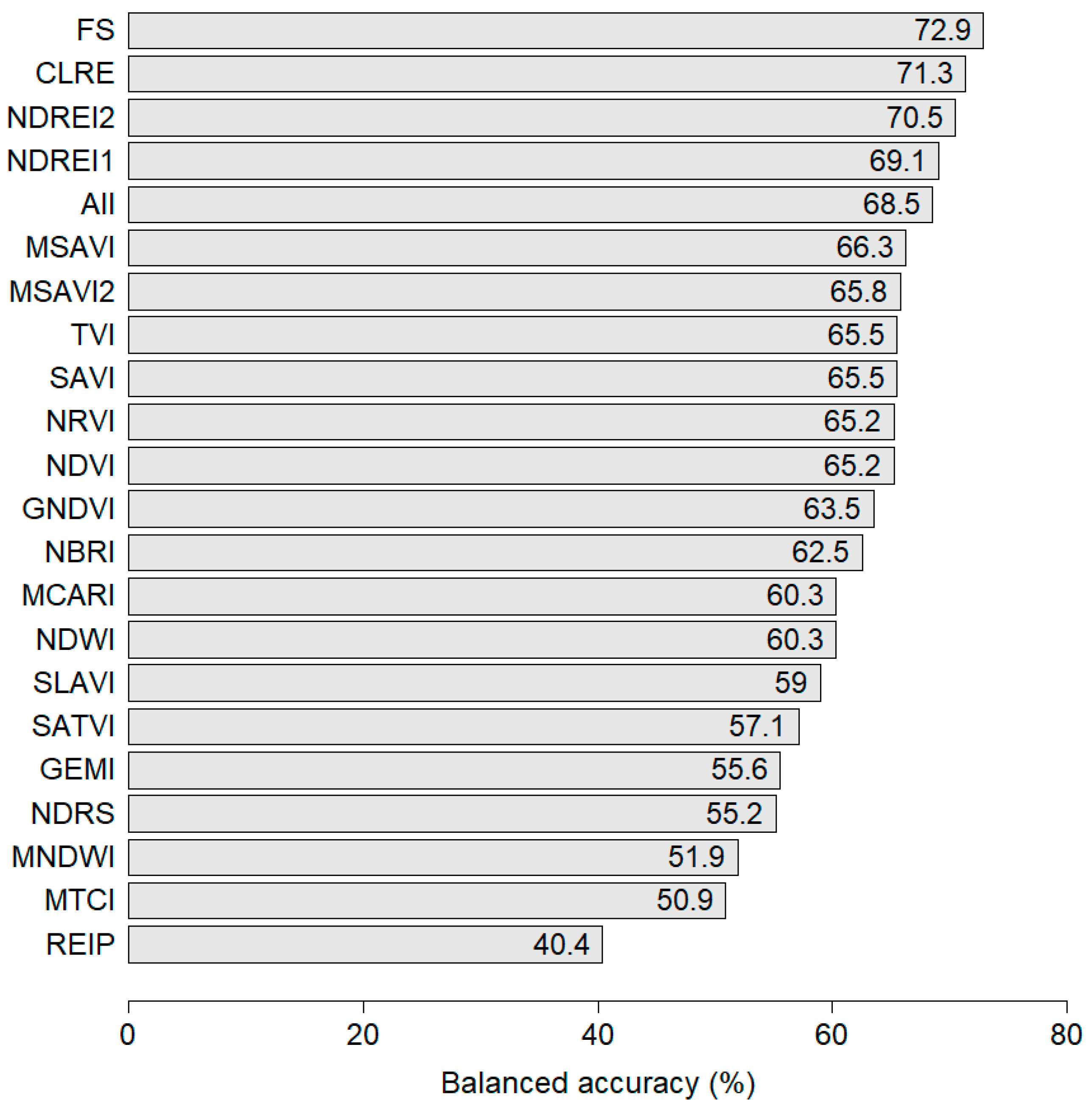
4.2. Identification of the Most Robust Spectral Index
4.3. Detection of Early Stage Attack
4.4. Attack Evolution Monitoring
4.5. Limitations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wermelinger, B. Ecology and Management of the Spruce Bark Beetle Ips Typographus—A Review of Recent Research. For. Ecol. Manag. 2004, 202, 67–82. [Google Scholar] [CrossRef]
- Forzieri, G.; Girardello, M.; Ceccherini, G.; Spinoni, J.; Feyen, L.; Hartmann, H.; Beck, P.S.A.; Camps-Valls, G.; Chirici, G.; Mauri, A.; et al. Emergent Vulnerability to Climate-Driven Disturbances in European Forests. Nat. Commun. 2021, 12, 1081. [Google Scholar] [CrossRef]
- Cook, E.R.; Zedaker, S.M. The Dendroecology of Red Spruce Decline. In Ecology and Decline of Red Spruce in the Eastern United States; Eagar, C., Adams, M.B., Eds.; Ecological Studies; Springer: New York, NY, USA, 1992; pp. 192–231. ISBN 978-1-4612-2906-3. [Google Scholar]
- Eagar, C.; Adams, M.B. (Eds.) Ecology and Decline of Red Spruce in the Eastern United States; Ecological Studies; Springer: New York, NY, USA, 1992; ISBN 978-0-387-97786-7. [Google Scholar]
- Scott, J.T.; Siccama, T.G.; Johnson, A.H.; Breisch, A.R. Decline of Red Spruce in the Adirondacks, New York. Bull. Torrey Bot. Club 1984, 111, 438–444. [Google Scholar] [CrossRef]
- Biedermann, P.H.W.; Müller, J.; Grégoire, J.-C.; Gruppe, A.; Hagge, J.; Hammerbacher, A.; Hofstetter, R.W.; Kandasamy, D.; Kolarik, M.; Kostovcik, M.; et al. Bark Beetle Population Dynamics in the Anthropocene: Challenges and Solutions. Trends Ecol. Evol. 2019, 34, 914–924. [Google Scholar] [CrossRef] [Green Version]
- Southern Pine Beetle Suppression Strategy in Southeastern U.S.: Environmental Impact Statement; Northwestern University: Evanston, IL, USA, 1974.
- Cailleret, M.; Nourtier, M.; Amm, A.; Durand-Gillmann, M.; Davi, H. Drought-Induced Decline and Mortality of Silver Fir Differ among Three Sites in Southern France. Ann. For. Sci. 2014, 71, 643–657. [Google Scholar] [CrossRef]
- Niemann, K.O.; Visintini, F. Assessment of Potential for Remote Sensing Detection of Bark Beetle-Infested Areas during Green Attack: A Literature Review; Mountain Pine Beetle Initiative Working Paper 2005-02; Natural Resources Canada; Canadian Forest Service; Pacific Forestry Centre: Victoria, BC, Canada, 2005.
- Weng, Q. Remote Sensing for Sustainability, 1st ed.; Taylor & Francis: Abingdon, UK, 2019; ISBN 978-0-367-87140-6. [Google Scholar]
- White, J.; Wulder, M.; Brooks, D.; Reich, R.; Wheate, R. Detection of Red Attack Stage Mountain Pine Beetle Infestation with High Spatial Resolution Satellite Imagery. Remote Sens. Environ. 2005, 96, 340–351. [Google Scholar] [CrossRef]
- Wulder, M.A.; Dymond, C.C.; White, J.C.; Leckie, D.G.; Carroll, A.L. Surveying Mountain Pine Beetle Damage of Forests: A Review of Remote Sensing Opportunities. For. Ecol. Manag. 2006, 221, 27–41. [Google Scholar] [CrossRef]
- Skakun, R.S.; Wulder, M.A.; Franklin, S.E. Sensitivity of the Thematic Mapper Enhanced Wetness Difference Index to Detect Mountain Pine Beetle Red-Attack Damage. Remote Sens. Environ. 2003, 86, 433–443. [Google Scholar] [CrossRef]
- Bárta, V.; Lukeš, P.; Homolová, L. Early Detection of Bark Beetle Infestation in Norway Spruce Forests of Central Europe Using Sentinel-2. Int. J. Appl. Earth Obs. Geoinf. 2021, 100, 102335. [Google Scholar] [CrossRef]
- Hlásny, T.; König, L.; Krokene, P.; Lindner, M.; Montagné-Huck, C.; Müller, J.; Qin, H.; Raffa, K.F.; Schelhaas, M.-J.; Svoboda, M.; et al. Bark Beetle Outbreaks in Europe: State of Knowledge and Ways Forward for Management. Curr. For. Rep. 2021, 7, 138–165. [Google Scholar] [CrossRef]
- Solano-Correa, Y.T.; Carcereri, D.; Bovolo, F.; Bruzzone, L. Identification of Non-Photosynthetic Vegetation Areas in Sentinel-2 Satellite Image Time Series. In Proceedings of the SPIE Remote Sensing: Image and Signal Processing for Remote Sensing XXV, Strasbourg, France, 9–12 September 2019; Volume 11155, p. 111550Y. [Google Scholar]
- Solano-Correa, Y.T.; Bovolo, F.; Bruzzone, L.; Fernández-Prieto, D. Automatic Derivation of Cropland Phenological Parameters by Adaptive Non-Parametric Regression of Sentinel-2 NDVI Time Series. In Proceedings of the IGARSS 2018, Valencia, Spain, 22–27 July 2018; pp. 1946–1949. [Google Scholar]
- Lausch, A.; Heurich, M.; Gordalla, D.; Dobner, H.-J.; Gwillym-Margianto, S.; Salbach, C. Forecasting Potential Bark Beetle Outbreaks Based on Spruce Forest Vitality Using Hyperspectral Remote-Sensing Techniques at Different Scales. For. Ecol. Manag. 2013, 308, 76–89. [Google Scholar] [CrossRef]
- Fernandez-Carrillo, A.; Patočka, Z.; Dobrovolný, L.; Franco-Nieto, A.; Revilla-Romero, B. Monitoring Bark Beetle Forest Damage in Central Europe. A Remote Sensing Approach Validated with Field Data. Remote Sens. 2020, 12, 3634. [Google Scholar] [CrossRef]
- Franklin, S.E.; Wulder, M.A.; Skakun, R.S.; Carroll, A.L. Mountain Pine Beetle Red-Attack Forest Damage Classification Using Stratified Landsat TM Data in British Columbia, Canada. Photogramm. Eng. Remote Sens. 2003, 69, 283–288. [Google Scholar] [CrossRef]
- Havašová, M.; Bucha, T.; Ferenčík, J.; Jakuš, R. Applicability of a Vegetation Indices-Based Method to Map Bark Beetle Outbreaks in the High Tatra Mountains. Ann. For. Res. 2015, 58, 295–310. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Bentz, B.; Alvarez, M.F.; Coops, N.C. Estimating the Probability of Mountain Pine Beetle Red-Attack Damage. Remote Sens. Environ. 2006, 101, 150–166. [Google Scholar] [CrossRef]
- Yang, S. Detecting Bark Beetle Damage with Sentinel-2 Multi-Temporal Data in Sweden. Master’s Thesis, Lund University, Lund, Sweden, 2019. [Google Scholar]
- Bárta, V.; Hanuš, J.; Dobrovolný, L.; Homolová, L. Comparison of Field Survey and Remote Sensing Techniques for Detection of Bark Beetle-Infested Trees. For. Ecol. Manag. 2022, 506, 119984. [Google Scholar] [CrossRef]
- Hellwig, F.M.; Stelmaszczuk-Górska, M.A.; Dubois, C.; Wolsza, M.; Truckenbrodt, S.C.; Sagichewski, H.; Chmara, S.; Bannehr, L.; Lausch, A.; Schmullius, C. Mapping European Spruce Bark Beetle Infestation at Its Early Phase Using Gyrocopter-Mounted Hyperspectral Data and Field Measurements. Remote Sens. 2021, 13, 4659. [Google Scholar] [CrossRef]
- Coops, N.C.; Johnson, M.; Wulder, M.A.; White, J.C. Assessment of QuickBird High Spatial Resolution Imagery to Detect Red Attack Damage Due to Mountain Pine Beetle Infestation. Remote Sens. Environ. 2006, 103, 67–80. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Hilker, T.; Wulder, M.A.; Carroll, A.L. Detecting Mountain Pine Beetle Red Attack Damage with EO-1 Hyperion Moisture Indices. Int. J. Remote Sens. 2007, 28, 2111–2121. [Google Scholar] [CrossRef]
- Abdullah, H.; Skidmore, A.K.; Darvishzadeh, R.; Heurich, M. Sentinel-2 Accurately Maps Green-Attack Stage of European Spruce Bark Beetle (Ips typographus, L.) Compared with Landsat-8. Remote Sens. Ecol. Conserv. 2019, 5, 87–106. [Google Scholar] [CrossRef] [Green Version]
- Abdullah, H.; Skidmore, A.K.; Darvishzadeh, R.; Heurich, M. Timing of Red-Edge and Shortwave Infrared Reflectance Critical for Early Stress Detection Induced by Bark Beetle (Ips typographus, L.) Attack. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101900. [Google Scholar] [CrossRef]
- Abdullah, H.; Darvishzadeh, R.; Skidmore, A.K.; Heurich, M. Sensitivity of Landsat-8 OLI and TIRS Data to Foliar Properties of Early Stage Bark Beetle (Ips typographus, L.) Infestation. Remote Sens. 2019, 11, 398. [Google Scholar] [CrossRef] [Green Version]
- Gomez, D.F.; Ritger, H.M.W.; Pearce, C.; Eickwort, J.; Hulcr, J. Ability of Remote Sensing Systems to Detect Bark Beetle Spots in the Southeastern US. Forests 2020, 11, 1167. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Magnussen, S.; Coops, N.C.; Wulder, M.A. Curve Fitting of Time-Series Landsat Imagery for Characterizing a Mountain Pine Beetle Infestation. Int. J. Remote Sens. 2010, 31, 3263–3271. [Google Scholar] [CrossRef]
- Huo, L.; Persson, H.J.; Lindberg, E. Early Detection of Forest Stress from European Spruce Bark Beetle Attack, and a New Vegetation Index: Normalized Distance Red & SWIR (NDRS). Remote Sens. Environ. 2021, 255, 112240. [Google Scholar] [CrossRef]
- Liang, L.; Chen, Y.; Hawbaker, T.; Zhu, Z.; Gong, P. Mapping Mountain Pine Beetle Mortality through Growth Trend Analysis of Time-Series Landsat Data. Remote Sens. 2014, 6, 5696–5716. [Google Scholar] [CrossRef] [Green Version]
- Meddens, A.J.H.; Hicke, J.A. Spatial and Temporal Patterns of Landsat-Based Detection of Tree Mortality Caused by a Mountain Pine Beetle Outbreak in Colorado, USA. For. Ecol. Manag. 2014, 322, 78–88. [Google Scholar] [CrossRef]
- Senf, C.; Pflugmacher, D.; Wulder, M.A.; Hostert, P. Characterizing Spectral–Temporal Patterns of Defoliator and Bark Beetle Disturbances Using Landsat Time Series. Remote Sens. Environ. 2015, 170, 166–177. [Google Scholar] [CrossRef]
- Ye, S.; Rogan, J.; Zhu, Z.; Hawbaker, T.J.; Hart, S.J.; Andrus, R.A.; Meddens, A.J.H.; Hicke, J.A.; Eastman, J.R.; Kulakowski, D. Detecting Subtle Change from Dense Landsat Time Series: Case Studies of Mountain Pine Beetle and Spruce Beetle Disturbance. Remote Sens. Environ. 2021, 263, 112560. [Google Scholar] [CrossRef]
- Dalponte, M.; Marzini, S.; Solano-Correa, Y.T.; Tonon, G.; Vescovo, L.; Gianelle, D. Mapping Forest Windthrows Using High Spatial Resolution Multispectral Satellite Images. Int. J. Appl. Earth Obs. Geoinf. 2020, 93, 102206. [Google Scholar] [CrossRef]
- Sboarina, C.; Cescatti, A. II Clima Del Trentino–Distribuzione Spaziale Delle Principali Variabili Climatiche [The Climate of Trentino–Spatial Distribution of the Principal Climatic Variables]; Report 33; Centro di Ecologia Alpina, Viote del Monte Bondone: Trento, Italy, 2004. [Google Scholar]
- Meteotrentino. Available online: http://storico.meteotrentino.it/web.htm?ppbm=T0409&rs&1&df (accessed on 14 June 2022).
- ESA, S.-2 Spatial—Resolutions—Sentinel-2 MSI—User Guides—Sentinel Online—Sentinel Online. Available online: https://sentinels.copernicus.eu/web/sentinel/user-guides/sentinel-2-msi/resolutions/spatial (accessed on 4 August 2021).
- Open Access Hub. Available online: https://scihub.copernicus.eu/ (accessed on 15 March 2021).
- Roussel, J.R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.; Meador, A.S.; Bourdon, J.F.; De Boissieu, F.; Achim, A. LidR: Airborne LiDAR Data Manipulation and Visualization for Forestry Applications. Remote Sens. Environ. 2020, 251, 1120612021. [Google Scholar]
- Yu, X.; Hyyppä, J.; Litkey, P.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Single-Sensor Solution to Tree Species Classification Using Multispectral Airborne Laser Scanning. Remote Sens. 2017, 9, 108. [Google Scholar] [CrossRef] [Green Version]
- Korpela, I.; Ørka, H.O.; Hyyppä, J.; Heikkinen, V.; Tokola, T. Range and AGC Normalization in Airborne Discrete-Return LiDAR Intensity Data for Forest Canopies. ISPRS J. Photogramm. Remote Sens. 2010, 65, 369–379. [Google Scholar] [CrossRef]
- Dalponte, M.; Coomes, D.A. Tree-Centric Mapping of Forest Carbon Density from Airborne Laser Scanning and Hyperspectral Data. Methods Ecol. Evol. 2016, 7, 1236–1245. [Google Scholar] [CrossRef] [Green Version]
- Dalponte, M.; Frizzera, L.; Gianelle, D. How to Map Forest Structure from Aircraft, One Tree at a Time. Ecol. Evol. 2018, 8, 5611–5618. [Google Scholar] [CrossRef]
- Dalponte, M.; Frizzera, L.; Ørka, H.O.; Gobakken, T.; Næsset, E.; Gianelle, D. Predicting Stem Diameters and Aboveground Biomass of Individual Trees Using Remote Sensing Data. Ecol. Indic. 2018, 85, 367–376. [Google Scholar] [CrossRef]
- Nguyen, H.M.; Demir, B.; Dalponte, M. A Weighted SVM-Based Approach to Tree Species Classification at Individual Tree Crown Level Using LiDAR Data. Remote Sens. 2019, 11, 2948. [Google Scholar] [CrossRef] [Green Version]
- Versace, S.; Gianelle, D.; Frizzera, L.; Tognetti, R.; Garfì, V.; Dalponte, M. Prediction of Competition Indices in a Norway Spruce and Silver Fir-Dominated Forest Using Lidar Data. Remote Sens. 2019, 11, 2734. [Google Scholar] [CrossRef] [Green Version]
- Zhao, K.; Suarez, J.C.; Garcia, M.; Hu, T.; Wang, C.; Londo, A. Utility of Multitemporal Lidar for Forest and Carbon Monitoring: Tree Growth, Biomass Dynamics, and Carbon Flux. Remote Sens. Environ. 2018, 204, 883–897. [Google Scholar] [CrossRef]
- Hijmans, R.J.; Etten, J.V.; Sumner, M.; Cheng, J.; Baston, D.; Bevan, A.; Bivand, R.; Busetto, L.; Canty, M.; Fasoli, B.; et al. Raster: Geographic Data Analysis and Modeling. Available online: https://cran.r-project.org/web/packages/raster/index.html (accessed on 22 June 2022).
- Leutner, B.; Horning, N.; Schwalb-Willmann, J.; Hijmans, R.J. RStoolbox: Tools for Remote Sensing Data Analysis. Available online: https://cran.r-project.org/web/packages/RStoolbox/index.html (accessed on 22 June 2022).
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between Leaf Chlorophyll Content and Spectral Reflectance and Algorithms for Non-Destructive Chlorophyll Assessment in Higher Plant Leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef]
- Pinty, B.; Verstraete, M.M. GEMI: A Non-Linear Index to Monitor Global Vegetation from Satellites. Vegetatio 1992, 101, 15–20. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N. Remote Sensing of Chlorophyll Concentration in Higher Plant Leaves. Adv. Space Res. 1998, 22, 689–692. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; de Colstoun, E.B.; McMurtrey, J.E. Estimating Corn Leaf Chlorophyll Concentration from Leaf and Canopy Reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Xu, H. Modification of Normalised Difference Water Index (NDWI) to Enhance Open Water Features in Remotely Sensed Imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A Modified Soil Adjusted Vegetation Index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Dash, J.; Curran, P.J. The MERIS Terrestrial Chlorophyll Index. Int. J. Remote Sens. 2004, 25, 5403–5413. [Google Scholar] [CrossRef]
- García, M.J.L.; Caselles, V. Mapping Burns and Natural Reforestation Using Thematic Mapper Data. Geocarto Int. 1991, 6, 31–37. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, M.N. Spectral Reflectance Changes Associated with Autumn Senescence of Aesculus Hippocastanum L. and Acer Platanoides L. Leaves. Spectral Features and Relation to Chlorophyll Estimation. J. Plant Physiol. 1994, 143, 286–292. [Google Scholar] [CrossRef]
- Barnes, E.; Clarke, T.; Richards, S.; Colaizzi, P.; Haberland, J.; Kortrzewski, M.; Waller, P.; Choi, C.; Riley, E.; Thompson, T.; et al. Coincident Detection of Crop Water Stress, Nitrogen Status and Canopy Density Using Ground-Based Multispectral Data; American Society of Agronomy: Madison, WI, USA, 2000; pp. 1–15. [Google Scholar]
- Rouse, J.; Haas, R.H.; Schell, J.A.; Deering, D. Monitoring Vegetation Systems in the Great Plains with ERTS; NASA Special Publication; NASA: Washington, DC, USA, 1973.
- McFeeters, S.K. The Use of the Normalized Difference Water Index (NDWI) in the Delineation of Open Water Features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Baret, F.; Guyot, G. Potentials and Limits of Vegetation Indices for LAI and APAR Assessment. Remote Sens. Environ. 1991, 35, 161–173. [Google Scholar] [CrossRef]
- Guyot, G.; Baret, F.; Major, D.J. High Spectral Resolution: Determination of Spectral Shifts between the Red and the near Infrared. Int. Arch. Photogramm. Remote Sens. 1988, 11, 750–760. [Google Scholar]
- Marsett, R.C.; Qi, J.; Heilman, P.; Biedenbender, S.H.; Carolyn Watson, M.; Amer, S.; Weltz, M.; Goodrich, D.; Marsett, R. Remote Sensing for Grassland Management in the Arid Southwest. Rangel. Ecol. Manag. 2006, 59, 530–540. [Google Scholar] [CrossRef]
- Huete, A.R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Lymburner, L.; Beggs, P.J.; Jacobson, C.R. Estimation of Canopy-Average Surface-Specific Leaf Area Using Landsat TM Data. Photogramm. Eng. Remote Sens. 2000, 66, 183–191. [Google Scholar]
- Bannari, A.; Morin, D.; Bonn, F.; Huete, A.R. A Review of Vegetation Indices. Remote Sens. Rev. 1995, 13, 95–120. [Google Scholar] [CrossRef]
- Dalponte, M.; Frizzera, L.; Gianelle, D. Individual Tree Crown Delineation and Tree Species Classification with Hyperspectral and LiDAR Data. PeerJ 2019, 2019, e6227. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Peng, C.; Work, T.; Candau, J.-N.; DesRochers, A.; Kneeshaw, D. Application of Machine-Learning Methods in Forest Ecology: Recent Progress and Future Challenges. Environ. Rev. 2018, 26, 339–350. [Google Scholar] [CrossRef] [Green Version]
- Sothe, C.; Dalponte, M.; de Almeida, C.M.; Schimalski, M.B.; Lima, C.L.; Liesenberg, V.; Miyoshi, G.T.; Tommaselli, A.M.G. Tree Species Classification in a Highly Diverse Subtropical Forest Integrating UAV-Based Photogrammetric Point Cloud and Hyperspectral Data. Remote Sens. 2019, 11, 1338. [Google Scholar] [CrossRef] [Green Version]
- Pudil, P.; Novovičová, J.; Kittler, J. Floating Search Methods in Feature Selection. Pattern Recognit. Lett. 1994, 15, 1119–1125. [Google Scholar] [CrossRef]
- Aragón-Royón, F.; Jiménez-Vílchez, A.; Arauzo-Azofra, A.; Benítez, J.M. FSinR: An Exhaustive Package for Feature Selection. arXiv 2020, arXiv:2002.10330. [Google Scholar]
- CCI-LC, E. ESA CCI Land Cover Website. Available online: http://www.esa-landcover-cci.org/ (accessed on 4 August 2021).
- Liu, H.; Gong, P.; Wang, J.; Clinton, N.; Bai, Y.; Liang, S. Annual Dynamics of Global Land Cover and Its Long-Term Changes from 1982 to 2015. Earth Syst. Sci. Data 2020, 12, 1217–1243. [Google Scholar] [CrossRef]
- Klouček, T.; Komárek, J.; Surový, P.; Hrach, K.; Janata, P.; Vašíček, B. The Use of UAV Mounted Sensors for Precise Detection of Bark Beetle Infestation. Remote Sens. 2019, 11, 1561. [Google Scholar] [CrossRef] [Green Version]
- Paris, C.; Bruzzone, L.; Fernández-Prieto, D. A Novel Approach to the Unsupervised Update of Land-Cover Maps by Classification of Time Series of Multispectral Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4259–4277. [Google Scholar] [CrossRef]
- PlanetScope Introducing Next-Generation PlanetScope Imagery. Available online: https://www.planet.com/pulse/introducing-next-generation-planetscope-monitoring/ (accessed on 9 December 2021).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | Health Status | Number of Trees |
|---|---|---|
| Picea abies (L.) Karst. | H | 86 |
| A1 | 94 | |
| A2 | 222 | |
| Betula pendula Roth | H | 4 |
| Carpinus betulus L. | H | 13 |
| Castanea sativa Mill. | H | 6 |
| Larix decidua Mill. | H | 84 |
| Pinus sylvestris L. | H | 23 |
| Populus tremula L. | H | 28 |
| Robinia pseudoacacia L. | H | 4 |
| Tilia platyphyllos Scop. | H | 1 |
| Index | S2 Bands | Reference |
|---|---|---|
| CLRE—Red-Edge Band Chlorophyll Index | 5, 7 | [54] |
| GEMI—Global Environmental Monitoring Index | 4, 8 | [55] |
| GNDVI—Green Normalized Difference Vegetation Index | 3, 8 | [56] |
| MCARI—Modified Chlorophyll Absorption Ratio Index | 3, 4, 5 | [57] |
| MNDWI—Modified Normalized Difference Water Index | 3, 11 | [58] |
| MSAVI—Modified Soil-Adjusted Vegetation Index | 3, 8 | [59] |
| MSAVI2—Modified Soil-Adjusted Vegetation Index 2 | 3, 8 | [59] |
| MTCI—MERIS Terrestrial Chlorophyll Index | 3, 5, 6 | [60] |
| NBRI—Normalized Burn Ratio Index | 8, 12 | [61] |
| NDREI1—Normalized Difference Red Edge Index 1 | 6, 5 | [62] |
| NDREI2—Normalized Difference Red Edge Index 2 | 7, 5 | [63] |
| NDRS—Normalized Distance Red and SWIR | 4, 12 | [33] |
| NDVI—Normalized Difference Vegetation Index | 4, 8 | [64] |
| NDWI—Normalized Difference Water Index | 8, 11 | [65] |
| NRVI—Normalized Ratio Vegetation Index | 4, 8 | [66] |
| REIP—Red-Edge Inflection Point | 4, 5, 6, 7 | [67] |
| SATVI—Soil-Adjusted Total Vegetation Index | 3, 11, 12 | [68] |
| SAVI—Soil-Adjusted Vegetation Index | 3, 8 | [69] |
| SLAVI—Specific Leaf Area Vegetation Index | 3, 8, 11 | [70] |
| TVI—Transformed Vegetation Index | 3, 8 | [71] |
| Rule | Type of Change |
|---|---|
| t1 = H AND t2 = H t1 = A1 AND t2 = A1 t1 = A2 AND t2 = A2 t1 = H AND t2 = A1 t1 = A1 AND t2 = A2 t1 = H AND t2 = A2 | Reasonable change |
| t1 = A1 AND t2 = H t1 = A2 AND t2 = H t1 = A2 AND t2 = A1 | Unreasonable change |
| Norway Spruce | Other Species | UAs (%) | |
|---|---|---|---|
| Norway spruce | 91 | 33 | 73.4 |
| Other species | 32 | 358 | 91.8 |
| PAs (%) | 74.0 | 91.6 |
| FS | CLRE | All | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| H | A1 | A2 | UAs (%) | H | A1 | A2 | UAs (%) | H | A1 | A2 | UAs (%) | |
| H | 58 | 18 | 12 | 65.9 | 53 | 23 | 2 | 67.9 | 61 | 35 | 12 | 56.5 |
| A1 | 13 | 58 | 38 | 53.2 | 20 | 61 | 51 | 46.2 | 13 | 42 | 35 | 46.7 |
| A2 | 5 | 11 | 155 | 90.6 | 3 | 3 | 152 | 96.2 | 2 | 10 | 158 | 92.9 |
| PAs (%) | 76.3 | 66.7 | 75.6 | 69.7 | 70.1 | 74.1 | 80.3 | 46.7 | 92.9 | |||
| H | A1 | A2 | OS | UAs (%) | |
|---|---|---|---|---|---|
| H | 57 | 10 | 2 | 13 | 69.5 |
| A1 | 5 | 67 | 14 | 5 | 75.3 |
| A2 | 1 | 7 | 176 | 18 | 87.1 |
| OS | 13 | 3 | 13 | 89 | 75.4 |
| PAs (%) | 75.0 | 77.0 | 85.9 | 72.4 |
| Maps Compared (t1, t2) | Reasonable (%) | Unreasonable (%) |
|---|---|---|
| 2 June, 12 June | 89.0 | 11.0 |
| 12 June, 22 June | 91.3 | 8.7 |
| 22 June, 7 July | 88.2 | 11.8 |
| 7 July, 22 July | 86.6 | 13.4 |
| 22 July, 6 August | 86.0 | 14.0 |
| 6 August, 19 August | 88.9 | 11.1 |
| 19 August, 3 September | 89.8 | 10.2 |
| 3 September, 15 September | 85.0 | 15.0 |
| 15 September, 30 September | 87.2 | 12.8 |
| Average | 88.0 | 12.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dalponte, M.; Solano-Correa, Y.T.; Frizzera, L.; Gianelle, D. Mapping a European Spruce Bark Beetle Outbreak Using Sentinel-2 Remote Sensing Data. Remote Sens. 2022, 14, 3135. https://doi.org/10.3390/rs14133135
Dalponte M, Solano-Correa YT, Frizzera L, Gianelle D. Mapping a European Spruce Bark Beetle Outbreak Using Sentinel-2 Remote Sensing Data. Remote Sensing. 2022; 14(13):3135. https://doi.org/10.3390/rs14133135
Chicago/Turabian StyleDalponte, Michele, Yady Tatiana Solano-Correa, Lorenzo Frizzera, and Damiano Gianelle. 2022. "Mapping a European Spruce Bark Beetle Outbreak Using Sentinel-2 Remote Sensing Data" Remote Sensing 14, no. 13: 3135. https://doi.org/10.3390/rs14133135
APA StyleDalponte, M., Solano-Correa, Y. T., Frizzera, L., & Gianelle, D. (2022). Mapping a European Spruce Bark Beetle Outbreak Using Sentinel-2 Remote Sensing Data. Remote Sensing, 14(13), 3135. https://doi.org/10.3390/rs14133135